Research Journal of Applied Sciences, Engineering and Technology 4(20): 3930-3936,... ISSN: 2040-7467
advertisement
: 3930-3936,... ISSN: 2040-7467")
Research Journal of Applied Sciences, Engineering and Technology 4(20): 3930-3936, 2012
ISSN: 2040-7467
© Maxwell Scientific Organization, 2012
Submitted: December 20, 2011
Accepted: April 23, 2012
Published: October 15, 2012
Discrete Neural Altitude Control for Hypersonic Vehicle Via Flight
Path Angle Tracking
Shixing Wang, Bin Xu, Fuchun Sun and Yifu Jiang
Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China
Abstract: In this study, the altitude control is analyzed for the longitudinal dynamics of a generic Hypersonic
Flight Vehicle (HFV). By transforming altitude command into the tracking of flight path angle with fast
dynamics, the system design is focusing on the control of the attitude subsystem. The virtual control is designed
with nominal feedback and Neural Network (NN) approximation via back-stepping. Under the proposed
controller, the Semiglobal Uniform Ultimate Boundedness (SGUUB) stability is guaranteed. The slow
dynamics are transformed into the parameter estimation problem and the update law is designed. The simulation
is presented to show the effectiveness of the proposed control approach.
Keywords: Discrete-time, hypersonic flight vehicle, neural network
INTRODUCTION
Hypersonic flight vehicles are intended to present a
reliable and more cost efficient way to access space. The
longitudinal model of the dynamics are known to be
unstable, non-minimum phase with respect to the
regulated output and affected by significant model
uncertainty.
The sliding mode control (Xu et al., 2004) is based
on the input-output linearization using Lie derivative
notation. Robust control (Wang and Stengel, 2000) took
advantage of genetic algorithm to track the parameter of
inverse nonlinear system. The adaptive control (Gibson
et al., 2009) and robust control (Hu et al., 2010) are
investigated by linearizing the model at the trim state.
Intelligent modeling is also applied on HFV control. The
basic idea is to formulate the HFV model with fuzzy TS
model (Hu et al., 2011) or characteristic modeling (Luo
and Li, 2011). The great convenience of this way is that
the complicated dynamics are synthesized by several
linear systems. The sequential loop closure controller
design (Fiorentini et al., 2009) is based on the
decomposition of the equations into functional
subsystems. The method followed the approach that
combined robust adaptive dynamic inversion with backstepping arguments to obtain control architecture
(Kokotovic, 1991). In Xu et al. (2011), one high gain
observer based controller is proposed for HFV control
with only one NN to compensate the lumped uncertainty.
In Gao and Sun (2011), the attitude states are considered
as fast dynamics where the altitude control is transformed
into the flight path angle tracking.
In this study, we analyze the discrete flight control of
hypersonic vehicles. For the modeling, the discrete HFV
model is obtained by Taylor expansion in this study. By
proper assumptions the discrete model is transformed into
the strict-feedback form where some theoretical results
have been studied in Yang et al. (2008). For the
nonlinearity and the coupling, the nominal part of the
dynamics should be considered for the feedback control
design to provide good performance. In GAO et al.
(2009), the back-stepping design of HFV is proposed. The
upper bound of control gain is taken to avoid the circular
design with new stability analysis (Xu et al., 2011). In this
study, we took the fast and slow dynamics for controller
design. Continued with the work in Xu et al. (2011), the
altitude tracking is done with flight path angle tracking.
The results are related with system states and reference
command performance.
In this study, we transform the altitude control of
HFV into the flight path angle tracking. In addition,
considering the characteristics of HFV, the nominal part
of the nonlinearity during each step is eliminated and the
NN is taken to approximate the system uncertainty.
Moreover, parameter estimation is designed for the
linearized slow dynamics. Simulation result shows the
effectiveness of this method.
METHODOLOGY
Hypersonic vehicle modeling: The control-oriented
model of the longitudinal dynamics of a generic
hypersonic aircraft considered in this study is given by
Wang and Stengel (2000). This model is comprised of
five state variables X = [V, h, ", (, q]T and two control
inputs Uc = [*e, $]T, where V is the velocity, ( is the flight
path angle, h is the altitude, " is the attack angle, q is the
Corresponding Author: Shixing Wang, Department of Computer Science and Technology, Tsinghua University, Beijing 100084,
China
3930
Res. J. Appl. Sci. Eng. Technol., 4(20): 3930-3936, 2012
pitch rate, *c is elevator deflection and $ is the throttle
setting:
V& =
T cos α − D µ sin γ
−
m
r2
x&1 = f 1 ( x1 ) + g1 ( x1 ) x 2
x& 2 = f 2 ( x1 , x 2 ) + g 2 ( x1 , x 2 ) x 3
x& 3 = f 3 ( x1 , x 2 , x 3 ) + g 3 ( x1 , x 2 , x 3 )u
y = x1
(1)
h& = V sin γ
(2)
L + T sin α µ − V r cos γ
−
mV
Vr 2
The definition of fi and gi, i = 1, 2, 3 V, can be found
in Xu et al. (2011).
The control objective of system (8) is to design an
adaptive controller, which makes (6(d , further h6hd
and all the signals involved are bounded.
2
γ& =
α& = q − γ&
q& =
M yy
(3)
(4)
Assumption 2: fi and gi are unknown smooth functions.
fi can be decomposed into the nominal part fiN and the
unknown part )f. There exist constants gi and gi such that
gi ≥ gi ≥ gi > 0 , i = 1, 3, V.
(5)
I yy
where, T, D, L and Myy represent thrust, drag, lift-force
and pitching moment respectively. m, Iyy and : represent
the mass of aircraft, moment of inertia about pitch axis
and gravity constant. r is the radial distance from center of
the earth and r = h+RE. More information about this
model can be found in Xu et al. (2004) and Wang and
Stengel (2000).
Given the tracking reference Vd and hd , we design the
velocity and altitude controller separately in Section IV.
System transformation:
Strict-feedback formulation:
Assumption 1: Since r is quite small, we take sin ( = ( in
(2) for simplification. The thrust term .T sin ". in (3) is
neglected because it is generally much smaller than L.
C
Discrete-time model: By first-order Taylor expansion
with sample time Ts, systems (6) and (8) can be
approximated as:
Slow dynamics: The velocity subsystem (1) can be
rewritten as follows:
uV = β
yV = V
V(k+1) = V(k)+Ts[fV(k)+gV(k)uV(k)]
(9)
x1(k+1) = x1(k)+Ts[f1(k)+g1(k)x2(k)]
x2(k+1) = x2(k)+Ts[f2(k)+g2(k)x3(k)]
x3(k+1) = x3(k)+Ts[f3(k)+g3(k)u(k)]
(10)
Discrete control design:
Adaptive NN control for fast dynamics:
The errors are defined as:
V& = f V + gV uV
C
(8)
z1(k) = x2(k)!x1d(k)
(11)
z2(k) = x2(k)!x2d(k)
(12)
z3(k) = x3(k)!x3d(k)
(13)
(6)
where, x2d(k), x3d(k) are the virtual control inputs to be
designed.
Fast dynamics: The tracking error of the altitude is
~
defined as h = h − hd and the flight path command is
chosen as:
⎡ − k (h − h ) − k (h − h )dt + h& ⎤
h
d
I ∫
d
d
⎥
V
⎢
⎥
⎣
⎦
γ d = arcsin ⎢
Step 1: From (11):
z1(k+1) = x1(k)+Ts[f1(k)+g1(k)x2(k)]!x1d(k+1) (14)
where, x1d(k+1) is acquired from (7):
(7)
Define X1(k) = [V(k), x1(k), x1d(k+1)]T. The
uncertainty is defined as:
if kh>0 and kI>0 are chosen and the flight-path angle
is controlled to follow (d, the altitude tracking error
is regulated to zero exponentially.
Define X = [x1, x2, x3]T, x1 = (, x2 = 2D, x3 = q, where
2D = "+(. Then the strict-feedback form equations of
the altitude subsystem (2)-(5) are written as:
U 1 (k ) =
3931
g1 [ − x1 ( k ) − Ts f 1 ( k ) + x1d ( k + 1)]
+ x1 ( k ) + Ts f 1 N ( k )
g1 ( k )
= ω *1T θ1 ( X 1 ( k )) + ε1 ( X 1 ( k ))
(15)
Res. J. Appl. Sci. Eng. Technol., 4(20): 3930-3936, 2012
where, fIN(k) is the nominal part of f1(k), T*1 is the
optimal parameters for NN to approximate U1(k) and
g1(X1) is the NN reconstruction error.
Take x2(k) in (14) as the virtual control input and
design its desired value as:
x2d ( k ) =
− x1 ( k ) − Ts f 1 N ( k ) + c1 z1 ( k ) + ω$ 1T ( k )θ1 ( X 1 ( k ))
The update law for the NN weights is:
ω$ 2 ( k + 1) = ω$ 2 ( k ) − λ2 z2 ( k + 1)θ2 ( X 2 ( k )) − δ 2ω$ 2
Z3(k+1) = x3(k)+Ts[f3(k)+g3(k)u(k)]-x3d(k+1)
where, 0<c1<1 and ω$ 1 is the estimation of T*1.
Combining (12), (14) and (16), the following
equation can be obtained:
]
U 3 (k ) =
+ Ts g1 ( k ) z2 ( k )
Step 2: From (12):
u( k ) =
z2(k+1) = x2(k)+Ts[f2(k)+g2(k)x3(k)]!x2d(k+1) (19)
Define X2(k) = [V(k), x1(k), x2(k), x1d(k+1),
x1d(k+2)]. From (16), x2d(k+1) involves x1(k+1),
f1(k+1), z1(k+1) and x1d(k+1). It can be concluded
that x2d(k+1) is the function of X2(k). The uncertainty
U2(k) is defined and can be approximated by NN as:
c3 z3 ( k ) + ω$ 3T ( k )θ3 ( X 3 ( k )) − x 3 ( k ) − Ts f 3 N ( k )
z3 ( k + 1) =
(20)
where,
g3 ( k )
cz
g3 3 3
[
g3 ( k ) ~ T
ω 3 ( k )θ3 ( X 3 ( k )) − ε 3 ( X 3 ( k ))
g3
2
2
2
(27)
ω~3 ( k ) = ω$3 ( k ) − ω *3 :
The update law for the NN weights is:
Theorem 1: Considering system (10) with the controller
(26) and the update law (18), (23) and (28), all the signals
involved are semiglobal uniform ultimate bounded.
Proof: The following Lyapunov function is considered:
L(k) = L1(k)+L2(k)+L3(k)
2
]
ω$ 3 ( k + 1) = ω$ 3 ( k ) − λ3 z3 ( k + 1)θ3 ( X 3 ( k )) − δ 3ω$ 3 ( k ) (28)
(21)
(22)
(26)
Tsg 3 ( k )
+
where, 0<c2<1 and ω$ 2 is the estimation of *2. The
result of (20) and (21) is due to the fact that f2 = 0 and
g2 = 1.
Combining (13), (19) and (21), the following
equation can be obtained:
z2 ( k + 1) = c2 z2 ( k ) + Ts g 2 ( k ) z3 ( k )
+ [ω~ T ( k )θ ( X ) − ε ( X )]
(25)
where, 0<c3<1 and ω$ 3 is the estimation of T*3. Then:
where, T*2 is the optimal parameters and g2(X2(k)) is
the NN reconstruction error.
Take x3(k) in (19) as the virtual control input and
design its desired value as:
X3d(k) = [Tsg2(k)-1][-x2(k)+c2z2(k)+ ω$ T2(k)22(X2)]
g3 ( k )
+ x 3 ( k ) + Ts f 3 N ( k )
where, T*3 is the optimal parameters for NN to
approximate U3(k) and g3(X3(k)) is the NN
reconstruction error. The actual control input is
designed as:
ω$ 1 ( k + 1) = ω$ 1 ( k ) − λ1 z1 ( k + 1)θ1 ( X 1 ( k )) − δ1ω$ 1 (k) (18)
U2(k) = x2d(k+1) = T* 2 (X2(k))+ ω$ 2(X2(k))
g 3 [ − x 3 ( k ) − Ts f 3 ( k ) + x 3d ( k + 1)]
= ω *T3 θ3 ( X 3 ( k )) + ε 3 ( X 3 ( k ))
~ ( k ) = ω$ ( k ) − ω * . The update law for the
where, ω
1
1
1
NN weights is:
T
2 2
(24)
Define X3(k) = [V(k),XT(k), x1d(k+1), x1d(k+2),
x1d(k+3)]T. Similarly we can deduce that the
uncertainty U3(k) is the function of X3(k) and it can
be approximated by NN as:
z1 ( k + 1) = x1 ( k ) + Ts [ f 1 ( k ) + g1 ( k ) x 2 ( k )] − x1d ( k + 1)
g1 ( k ) c1 z1 ( k ) + ω~1T ( k )θ1 ( X 1 ( k )) − ε1 ( X 1 ( k ))
(17)
=
g1
[
(23)
Step 3: From (13):
(16)
Ts g1
~ ( k ) = ω$ ( k ) − ω * .
where, ω
2
2
2
where,
2
L1(k) = L11(k)+L12(k)
3932
(29)
Res. J. Appl. Sci. Eng. Technol., 4(20): 3930-3936, 2012
2Ts g 1 z2 ( k ) z1 ( k + 1) ≤ Ts g 1 ρ14 z22 ( k ) + Ts g 1 ρ14−1 z12 ( k + 1) (38)
L2(k) = L21(k)+L22(k)
L3(k) = L31(k)+L32(k)
Similar to Ge et al. (2008), we have the following
inequality:
with,
ω~1T ( k + 1)ω~1 ( k + 1) ≤ (1 − δ1 )ω~1T ( k )ω~1 ( k )
L11(k) = z21(k)
L12 ( k ) =
(
+ Ts g 1 ρ14 z22 ( k ) + λ1 ρ11ε M2 + δ1 ω *1
λ1
+ δ1 (δ1 − 1 + λ1 ρ13 ) ω$ 1 ( k )
L21(k) = z22(k)
L22 ( k ) =
ω~2T ( k )ω~2 ( k )
λ2
2
(39)
+ (λ1 ρ11−1 + λ1δ1 ρ13−1 N 1 )z12 ( k + 1)
∆ L1 ( k ) ≤ −
ω~3T ( k )ω~3 ( k )
λ3
+
Define the first difference of L(k) as:
+
∆ L( k ) = L( k + 1) − L( k ) = ∆ L1 ( k ) + ∆ L2 ( k ) + ∆ L3 ( k )
ω~1 ( k + 1) = ω~1 ( k ) − λ1θ1 ( X 1 ( k )) z1 ( k + 1) − δ1ω$ 1
λ1 ρ11ε 212 M + δ1 ω *1
λ1
2
+
δ1 (δ1 + λ1 ρ13 − 1) ω$ 1 ( k )
λ1
Ts g 1 ρ24 z32 ( k )
λ2
(31)
λ1 N 1 + c1 ρ12 + ρ11−1 + δ1 ρ13−1 N 1 − 1 ≤ 0
δ1 + λ1 ρ13 − 1 ≤ 0
(32)
Then we have the conclusion of (41):
∆ L1 ( k ) ≤ − τ 11 L11 ( k ) − τ 12 L12 ( k ) + τ 13 + τ 14 L21 ( k )
where N1 is the number of the NN rules:
From (17), we have:
where,
g z ( k + 1)
2
1 1
g1 ( k )
− c1 z1 ( k ) z1 ( k + 1)
τ 11 =
(33)
+ ε1 ( k ) z1 ( k + 1) − Ts g 1 z 2 ( k ) z1 ( k + 1)
2g1(k)z1(k+1)#D11 g21M+D-1 11Z21(k+1)
(34)
2z1(k+1)z1(k)#D12z21(k+1)+D-1 12z21(k)
(35)
~ T ( k )ω
~ ( k ) + ω$ ( k )
~ T ( k )ω$ ( k ) = ω
2ω
1
1
1
1
1
2ω$ 1 ( k )θ1 ( X 1 ( k ))z1 ( k + 1) ≤ ρ13 ω$ 1 ( k )
2
δ1
λ1
τ 12 = 1 − c1 ρ12−1 +
2
− ω *1 (36)
(37)
τ 14 =
3933
Ts g 1 ρ14
λ1
λ1 ρ11ε12M + δ1 ω *1
τ 13 =
λ1
2
+ ρ13−1 N 1 z12 ( k + 1)
(40)
2
Provided the following inequalities hold:
Noting the following facts:
φ12 ( X 1 ( k )) ≤ N 1
⎛
Ts g 1 ρ14 ⎞ 2
δ1 ~ T
⎟z
ω A ( k )ω~ A ( k ) − ⎜⎜ 1 − c1 ρ12−1 +
λ1
λ1 ⎟⎠ 1
⎝
+ (λ1 N 1 + c1 ρ12 + ρ11−1 + δ1 ρ13−1 N 1 − 1)z12 ( k + 1)
(30)
From (18) and ω~1 ( k ) = ω$ 1 ( k ) − ω *1 , we have:
ω~1 ( k )θ1 ( X 1 ( k )) z1 ( k + 1) =
2
⎛
⎞
g1
+ ⎜⎜ λ12 N 1 − 2λ1
+ c1λ1 ρ12 ⎟⎟ z12 ( k + 1)
g
k
(
)
⎝
⎠
1
L31(k) = z23(k)
L32 ( k ) =
)
+ c1λ1 ρ12−1 + Ts g 1 ρ14 z12 ( k )
ω~1T ( k )ω~1 ( k )
Ts g 1 ρ14
λ1
2
(41)
Res. J. Appl. Sci. Eng. Technol., 4(20): 3930-3936, 2012
Similarly the following conclusions can be acquired:
)L2(k)#!J21L21(k)J22L22(k)+J23J24L31
(42)
)L3(k)#!J31L31(k)-J32L32(k)+J33
(43)
Adaptive control for slow dynamics: There already exist
some methods such as PID controller design and NN
control on HFV velocity control. One way is to model the
unknown function as follows:
where
τ 21 =
δ2 3
λ2
Ts ρ24
λ ρ ε 2 + δ ω *2
τ 23 = 2 21 2 M 2
λ2
τ 31 =
fV(k) = wTf(k)2f(k)
(47)
V(k+1) = V(k)+Ts[fV(k)+gV(k)uV(k)]
λ2
= 2TV(k)TV(k)
(48)
where, TV(k) is composed state variables while 2V is the
system parameters. For more detail about the formulation,
refer to Fiorentini et al. (2009). However here we
consider the discrete system so it should be with sampling
period Ts. The control gain of uV(k) is denoted as B(k) and
2
Ts ρ24
T
T
T
we have θV ( k ) = [θV ( k ), B( k )]
λ2
δ3
λ3
τ 32 = 1 − c3 ρ
(46)
In this part, we try to model the uncertainty with
parameter projection (Chen and Narendra, 2001):
τ 22 = 1 − c2 ρ22−1 +
τ 24 =
g-1V(k) = wTg(k)2g(k)g!1V(k)
The estimation error of V(k) is denoted as:
eV ( k ) = V$ ( k ) − V ( k ) = θ$VT ( k − 1)ωV ( k − 1) − V ( k )
−1
32
λ3 ρ31ε 32M + δ 3 ω *3
τ 33 =
λ3
(49)
Define a(k):
2
⎧⎪ 1, if eV ( k ) > ∆
a (k ) = ⎨
⎪⎩ 0, otherwise
Combining (41)-(43), we have the following inequality:
)L(k)#!K1L1(k)!K2L2(k)-K3L3(k)+K4
The parameter projection method is selected as:
(44)
a ( k )eV ( k )ωV ( k − 1)
(51)
θ$V ( k ) = θ$V ( k − 1) −
2
1 + ωV ( k − 1)
where the proper positive parameters Dij can be designed
to have the following results:
The controller is designed as:
K1 = τ 11 > 0
(
K2 = min {τ 21 − τ 12 , τ 22 } > 0
K3 = min {τ 31 − τ 24 , ς 32 } > 0
(50)
)
1
uv ( k ) = $
Vd ( k + 1) − θVT ( k )ω ( k − 1)
B( k )
(45)
(52)
SIMULATIONS
K4 = τ 23 + τ 33 > 0
Reference commands are generated by the filter:
Take rA = min{K1,K2,K3}, then )L(k)#!rAL(k)+K4.
we know L(k) is bounded, so zi(k),i = 1, 2, 3 and Tj(k), j
= 1, 2, 3, are semiglobal uniform ultimate bounded.
This completes the proof.
3934
hd
ω n1ω n22
=
hc ( s + ω n1 )( s 2 + 2ε cω n 2 s + ω n22 )
(53)
Res. J. Appl. Sci. Eng. Technol., 4(20): 3930-3936, 2012
Vd
ωn3
=
Vc ( S + ωn 3 )
-4
(54)
14
12
3
Attitude (ft)
Yd
γ
10
8
6
4
where, Tn1 = 0.2, Tn2 = 0.5, gc = 0.7, Tn3 = 10.
1.103
X 10
×10
2
0
1.102
1.101
-2
-4
1.100
0
10
20
30
Time (sec)
40
50
60
1.099
0
10
20
30
40
50
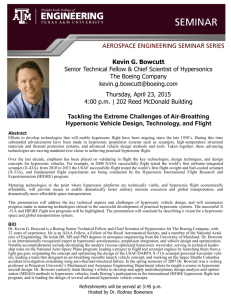
Fig. 3: Flight path angle tracking
(a)
ω1
ω2
ω3
ω4
0.12
Time (sec)
4
×10
Velocity (ft/s)
1.520
0.10
0.08
1.515
0.06
1.510
0.04
0.02
1.505
0
10
20
30
Time (sec)
40
50
60
0
0
10
20
(b)
30
Time (sec)
40
50
60
Fig. 4: Attack angle
Fig. 1: Altitude and velocity response
0.08
0.06
10
rad
Elevator deflection (deg)
0.10
20
0.04
0.02
0
0
-10
0
10
20
30
Time (sec)
40
50
-0.02
60
-0.04
0
(a)
10
20
30
Time (sec)
40
50
60
Fig. 5: Pitch rate
Throttle setting
0.8
The parameters for the controller are selected as kh =
0.15, kI = 0.02, 81 = 0.05, 82 = 0.05, 83 = 0.05, *1 = 0.02,
*2 = 0.02, *3 = 0.02, Ts = 0.02s, c1 = 0.9, c2 = 0.95, c3 =
0.87, cV = 0.9.
0.6
0.4
0.2
0
0
10
20
30
Time (sec)
(b)
Fig. 2: Control inputs
40
50
60
Figure 1 depicts the response performance that the
altitude controller tracks the step change with magnitude
200 ft while the velocity steps from 15060 to 15160 ft/s.
The control inputs of the elevator deflection and the
throttle setting are shown in Fig. 2. Flight path angle
tracks the reference command very well in Fig. 3 so that
the system tracks the altitude step change. From the attack
3935
Res. J. Appl. Sci. Eng. Technol., 4(20): 3930-3936, 2012
angle in Fig. 4 and pitch rate response in Fig. 5, we know
the related system states are bounded.
CONCLUSION
The altitude control of HFV is transformed into the
flight path angle tracking. Considering the characteristics
of HFV, the nominal part of the nonlinearity during each
step is eliminated and the NN is taken to approximate the
system uncertainty. Parameter estimation is designed for
the linearized slow dynamics. Simulation result shows the
effectiveness of this method.
ACKNOWLEDGMENT
This study was supported by the National Science
Foundation of China (Grants No: 60625304, 90716021).
The authors gratefully acknowledge Daoxiang Gao and
Chenguang Yang for the support regarding the discrete
controller design.
REFERENCES
Chen, L. and K. Narendra, 2001. Nonlinear adaptive
control using neural networks and multiple models.
Automatica, 37(8): 1245–1255.
Fiorentini, L., A. Serrani, M. Bolender and D.
Doman, 2009. Nonlinear robust adaptive control of
flexible air-breathing hypersonic vehicles. J. Guid.
Contr. Dyn., 32(2): 401-416.
GAO, D., Z. Sun and T. Du, 2009. Discrete-time
controller design for hypersonic vehicle via backstepping. Control Decision, 249(1), DOI:
CNKI:SUN:KZYC.0.2009-03-027.
Gao, D. and Z. Sun, 2011. Fuzzy tracking control design
for hypersonic vehicles via ts model. Sci. China
Inform. Sci., 54(3): 521-528.
Ge, S., C. Yang, and T. Lee, 2008. Adaptive predictive
control using neural network for a class of pure
feedback systems in discrete time. IEEE T. Neural
Network, 19(9): 1599-1614.
Gibson, T., L. Crespo and A. Annaswamy, 2009.
Adaptive control of hypersonic vehicles in the
presence of modeling uncertainties. IEEE Am. Contr.
Conf. ACC’09, pp: 3178-3183.
Hu, Y., F. Sun and H. Liu, 2010. Neural network-based
robust control for hypersonic flight vehicle with
uncertainty modelling. Int. J. Modell. Identif. Contr.,
11(1): 87-98.
Hu, Y., Y. Yuan, H. Min and F. Sun, 2011. Multiobjective robust control based on fuzzy singularly
perturbed models for hypersonic vehicles. Sci. China
Inform. Sci., 54(3): 563-576.
Kokotovic, P., 1991. The Joy of Feedback: Nonlinear and
Adaptive: 1991 bode Prize Lecture. IEEE Contr.
Syst. Magazine, 12: 7-17.
Luo, X. and J. Li, 2011. Fuzzy dynamic characteristic
model based attitude control of hypersonic vehicle in
gliding phase. Sci. China Inform. Sci., 54(3): 448459.
Xu, H., M. Mirmirani and P. Ioannou, 2004. Adaptive
sliding mode control design for a hypersonic flight
vehicle. J. Guid. Contr. Dyn., 27(5): 829-838.
Xu, B., D. Gao and S. Wang, 2011a. Adaptive neural
control based on hgo for hypersonic flight vehicles.
Sci. China Inform. Sci., 54(3): 511-520.
Xu, B., F. Sun, C. Yang, D. Gao and J. Ren, 2011b.
Adaptive discrete-time controller design with neural
network for hypersonic flight vehicle via backstepping. Int. J. Contr., 84(9): 1543-1552.
Yang, C., S. Ge, C. Xiang, T. Chai and T. Lee, 2008.
Output feedback nn control for two classes of
discrete-time systems with unknown control
directions in a unified approach. IEEE T. Neural
Network, 19(11): 1873-1886.
Wang, Q. and R. Stengel, 2000. Robust nonlinear control
of a hypersonic aircraft. J. Guid. Contr. Dyn., 23(4):
577-585.
3936