Research Journal of Applied Sciences, Engineering and Technology 4(14): 2259-2264,... ISSN: 2040-7467
advertisement
: 2259-2264,... ISSN: 2040-7467")
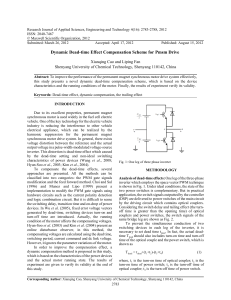
Research Journal of Applied Sciences, Engineering and Technology 4(14): 2259-2264, 2012 ISSN: 2040-7467 © Maxwell Scientific Organization, 2012 Submitted: March 23, 2012 Accepted: April 08, 2012 Published: July 15, 2012 Dynamic Dead-Time Effect Compensation Scheme for Pmsm Drive Xianqing Cao and Liping Fan Shenyang University of Chemical Technology, Shenyang 110142, China Abstract: In general, Voltage distortion is existed between the reference and the actual output voltages in a pulse-width-modulated voltage-source inverter. This distortion is dead-time effects, which caused by the deadtime setting and the trailing effect of non-ideal switching characteristics of the optical coupler and power devices. To improve the performance of the drive system effectively, this study presents a novel dynamic deadtime compensation, which is based on the device characteristics and the running conditions of the motor. Finally, the results of experiment verify its validity. Key words: Dead-time effect, dynamic compensation, the trailing effect INTRODUCTION ANALYSIS OF DEAD-TIME EFFECTS One of the key technology for the electric vehicle inustry is reducing the interference to other vehicle electrical appliance, which can be realized by the harmonic suppression for the permanent magnet synchronous motor drive system. In general, there exists voltage distortion between the reference and the actual output voltage in a pulse-width-modulated voltage-source inverter. This distortion is dead-time effect which caused by the dead-time setting and non-ideal switching characteristics of power devices (Wang et al., 2008; Hyun-Soo et al., 2003; Kim et al., 2004). To compensate the dead-time effects, several approaches are presented. All the methods can be classified into two categories: the PWM gate signals mdification and the feed forward method. Choi and Sul, (1996) and Munoz and Lipo (1999) present a implementation to modify the PWM gate signals using hardware circuits such as the current polarity detection and logic combination circuit. But it is difficult to sense the switching delay, transition time and on-drop of power devices. Wu et al. (2005), fixed error voltage vectors generated by dead-time, switching devices turn-on and turn-off time are introduced. Actually, the running condition of the motor affects the compensating voltages. Hyun-Soo et al. (2003) and Kim et al. (2004) present an online disturbance observer, in this method, the compensating voltages are calculated using the dead time, switching period, current command and dc link voltage. However, it ignores the parameter variations of the motor. In order to improve the compensation effect, a dynamic compensation method is proposed in this study, which is based on the characteristics of the power devices and the actual motor running state. One leg of the three-phase inverter which employs the space vector PWM technique is shown in Fig.1. Under ideal conditions, the state of the two power switches is complementary. But in practical application, the switch signals outputted by the controller (DSP) are delivered to power switches of the main circuit by the driving circuit which contains optical couplers. Considering the switch delay and tailing effect (the turn-off time is greater than the opening time) of optical couplers and power switches, the switch signals of the same bridge leg are shown as Fig. 2. Where, t1 is the turn-on time of optical coupler; t2 is the turn-on time of power switch; t3 is the turn-off time of optical coupler; t4 is the turn-off time of power switch. To prevent the simultaneous conduction of two switching devices in each leg of the inverter, it is necessary to set dead time tdead. In fact, the actual deadtime Tdead should also includes turn-on time and turn-off time of the optical couple and the power switch, which is shown as: Tdead = tdead + ( t1 + t2 ) − ( t3 + t4 ) (1) In addition, the direction of current ia will also affect the voltage applied to the motor. Considering the direction of current ia and the conduction voltage drop of the power switch and anti-parallel diode, the terminal ua0 is given in Table 1. As can be seen from Table 1, the general voltage can be represented as (Kim et al., 2004): ua 0 = (U dc − U ce + U d )( Sa − 0.5) − 0.5(U ce + U d ) sgn ( ia ) Corresponding Author: Xianqing Cao, Shenyang University of Chemical Technology, Shenyang 110142, China 2259 (2) Res. J. Appl. Sci. Eng. Technol., 4(14): 2259-2264, 2012 where, Ts is the sampling period. Ta(n) = Ta*(n)sgn(ia)Tdead, Ta*(n) is the on-time reference value of the upper power switch of phase a at the nth PWM period. According to the theory of electrical engineering, the relationship between the phase voltage and the neural voltage can be expressed as follows (Kim et al., 2004): uao + ubo + uco = 3 U dc − U ce + U d ⎛ Ta (n) + Tb (n) + Tc (n) ⎞ ×⎜ − 15 .⎟ ⎝ ⎠ 3 Ts uno (n) = − (4) ( sgn(ia ) + sgn(ib ) + sgn(ic ))(U ce + U d ) 6 From (3) and (4), it can be derived as: Fig. 1: One leg of three phase inverter uan (n) = U dc − U ce + U d ⎛ 2Ta (n) − Tb (n) − Tc (n) ⎞ ×⎜ ⎟ Ts 3 ⎠ ⎝ (2 sgn(ia ) − sgn(ib ) − sgn(ic ))(Uce + Ud ) − (5) 6 From the above analysis, phase a voltage distortion caused by the dead-time effect can be represented as: * ∆ uan (n) = uan (n) − uan (n) = (U ce − U d ) 3 ⎛ 2Ta* (n) − Tb* (n) − Tc* (n) ⎞ U + Ud ⎟⎟ + Sgn( A) ce × ⎜⎜ Ts 6 ⎝ ⎠ + Sgn( A) (6) U dc − U ce + U d Tdead × Ts 3 where Sgn(A) = (2sgn(ia)-sgn(ib)-sgn(ic)). Considering the actual selection of the power switch and anti-parallel diode (Uce and Ud is 2.3V and 2.5V respectively), the maximum value of the first part ⎛ U −U ⎛ 2T * (n) − Tb* (n) − Tc* (n) ⎞ ce d ⎟ × ⎜⎜ a max⎜ ⎟ ⎜ Ts 3 ⎠ ⎝ ⎝ it can be ignored relative to the remaining parts. Thus (6) can be simplified as: Fig. 2: Ideal and practical switching pattern Table 1: Relationship between ua0 and ia Sa=1 ua0=Udc/2-Uce ia$0 ia<0 ua0=Udc/2+Ud Sa=0 ua0= -Udc/2-Ud ua0= -Udc/2+Uce * ∆ uan (n) = uan (n) − uan (n) = Sgn( A) + Sgn( A) where, Udc represents the DC bus voltage, Uce and Ud represents the saturation voltage of the power switch and the anti-parallel diode respectively, sgn(is a sign function. Thus, the voltage during the nth PWM step can be derived from (2) and shown as (Kim et al., 2004): uao (n) = (U dc − U ce ⎞ 0.2 ⎟≤ × 2 = 013 . V ⎟ 3 ⎠ ⎛ T ( n) ⎞ + Ud ) ⎜ a − 0.5⎟ − 0.5(U ce + U d ) sgn(ia ) ⎝ Ts ⎠ U dc − U ce + U d Tdead × Ts 3 U ce + U d 6 (7) Similarly, voltage distortion of phase b and phase c can be expressed as follows: (3) 2260 U ce + U d 6 U dc − U ce + U d Tdead + Sgn( B) × 3 Ts ∆ubn (n) = Sgn( B) (8) Res. J. Appl. Sci. Eng. Technol., 4(14): 2259-2264, 2012 U ce + U d 6 U − U ce + U d Tdead + Sgn(C) dc × 3 Ts ∆ ucn (n) = Sgn(C) o 5 (9) Tj = 25 C o Tj = 125 C UCE /V 4 where, Sgn(B) = (2sgn(ib)-sgn(ia)-sgn(ic)) Sgn(C) = (2sgn (ia)-sgn(ib)). 3 2 1 ALGORITHM OF DEAD TIME EFFECT DYNAMIC COMPENSATION 0 0 ⎧U ce = 0.5 + 0.025ic 0 A < ic < 20 A ⎨ 20 A ≤ ic ≤ 280 A ⎩U ce = 1 + 0.006ic 320 1 10 Vcc = 600V Tj = 25 oC o T j = 125 C toff t on 0 10 -1 10 1 2 10 10 ic /A 3 10 Fig. 4: The relation curve between switch time and ic (10) Determination of Tdead: In this study, the optical couplers for driving circuit are 6n137, its turn-on and turn-off time are almost unchanged at constant ambient temperatures, so t1 and t3 can be chosen as its typical values 0.05 and 0.13 µs, respectively. If the power switches of the main circuit are IGBT, the turn-on and turn-off time of the driving chip will be bigger. The value of the turn-on time and turn-on time of power switch is also related with the conduction current ic. The relation curve is shown in Fig. 4, their value can be derived by (11): . + 0.001ic ⎪⎧ ton = t2 = 16 ⎨ t = t = 2.5 − 0.0006i c ⎩⎪ off 4 240 Fig. 3: The relation curve between Uce and ic ton and toff /µs Determination of Uce: The dead time dynamic compensation scheme proposed in this study is valid when the entire system studies in steady state, that is, the temperature rising is constant. The power switch selected in this study is Intelligent Power Module (IPM) PM200DSA120, its stable junction temperature is 125 according to the product manual. When the temperature keeping constant, the saturation voltage of the power switch Uce will change with the conduction current ic. The relation curve of Uce and ic is given in Fig. 3, using the partition linearization means, Uce can calculated by (10): 160 ic /A 80 (11) Because they all have little changes during the whole operating range, for simplicity,t2 and t4 can be chosen as 1.7 and 2.45µs, respectively in the practical application. Determination of Sgn(C): Sgn(C) depends on the current direction. According to SVPWM theory, the current direction determined by the sector of the current vector. The relationship between Sgn(C) and the sector is given in Table 2. Table 2: Relationship between sign function and the sector Sgn(A) Sgn(B) sector Sgn(ia) Sgn(ib) Sgn(ic) 1 + 4 -2 2 + + 2 2 3 + -2 4 4 + + -4 2 5 + -2 -2 6 + + 2 -4 Sgn(C) -2 -4 -2 2 4 2 Determination of voltage distortion: The voltage distortion in two-phase stationary frame can be derived from (7), (8) and (9), shown as follows: 1 ⎡ ⎡ ∆ usα ⎤ 2 ⎢ 1 − 2 ⎥= ⎢ ⎢ 3 ⎢⎣ ∆ usβ ⎥⎦ 3 ⎢ 0 ⎢⎣ 2 1 ⎤ ⎡∆u ⎤ an ⎥ 2 ⎥⎢ ⎥ ∆u 3 ⎥ ⎢ bn ⎥ ⎢∆u ⎥ − 2 ⎥⎦ ⎣ cn ⎦ − (12) Once )ua" and )us$ is determined, the suitable voltage vector can be calculated by the SVPWM algorithm. RESULTS OF SIMULATION AND EXPERIMENT A block diagram of the PMSM drive based on dynamic dead-time compensation is shown in Fig. 5. The parameters of PMSM used in this study are shown in Table 3. Because the dead-time effects phenomena are obvious when the motor runs at low speed and light load, 2261 Res. J. Appl. Sci. Eng. Technol., 4(14): 2259-2264, 2012 Fig 5: Block diagram of PMSM drive based on the proposed dynamic dead-time effects compensation 55 440 3 1800 90 0.061 2.53 3.29 0.65 iA /20A Table 3: Relationship between sign function and the sector Rated power PN (kW) Rated voltage UN (V) Magnetic pole pairs p Rated speed (r/min) Rated current (A) Stator resistance Rs S d-axis stator inductance Ld mH q-axis stator inductance Lq mH Rotor flux linkageQf Wb 20 uddead uqdead 10 Harmonic magnitude/ fundamental amplitude (%) uddead , uqdead 50 ms 0.0210 0.0208 0.0206 0.0204 0.0202 0.0200 0 t/S 2 (a) q- and d-axis voltage distortion 20 iA , i B , iC /A 18.0 16.2 14.4 12.6 10.8 9.0 7.2 5.4 3.6 1.8 0 5 8 11 14 17 20 Harmonic order 23 26 29 Fig. 7: a-phase current and harmonious analysis without compensation at case 1 therefore, the effectiveness of the proposed approach is verified only in this case. 0 Simulation results: Results of simulation are shown in Fig. 6 in the condition: TZ = 30 N.m , n* = 200 r/min, It can be seen: In the steady state, the q- and d-axis error voltage caused by dead-time effects are periodic functions, whose cycle is same as the cycle of the PWM; there exists zero clamp, at the same time, the shoulder of the current wave will became flat. These phenomena will have adverse effects on the motor system, therefore, it is necessary for dead-time compensation. -20 0.05 0.10 0.15 t/S (b) dead-time effects Fig. 6: Current difference caused by dead-time effects 2262 iA /35 A iA /20A Res. J. Appl. Sci. Eng. Technol., 4(14): 2259-2264, 2012 50 ms Harmonic magnitude/ fundamental amplitude (%) Harmonic magnitude/ fundamental amplitude 50 ms 11.3% 10.17% 9.04% 7.91% 6.78% 5.65% 4.52% 3.39% 2.26% 1.13% 0 2 5 8 11 14 17 20 Harmonic order 23 26 29 2 Fig. 8: a-phase current wave and harmonious analysis of the proposed compensation scheme at case 1 5 8 11 14 17 20 Harmonic order 23 26 29 Fig.10: a-phase current wave and harmonious analysis of the proposed compensation scheme at case iA /35A without compensation and it reduced to 12.83% with the proposed compensation method. At case2, the THD of the current is 11.52% when without compensation and it reduced to 7.81% with the proposed compensation method. From these Figures, we can see that the proposed scheme can improve the response performance and give an ideal current wave at different load torque and different reference speed. It is especially apparent at the low speed and light load. 50 ms Harmonic magnitude/ fundamental amplitude (%) 6.70 6.03 5.36 4.69 4.02 3.35 2.68 2.01 1.34 0.67 0 9.90 8.91 7.92 6.93 5.94 4.95 3.96 2.97 1.98 0.99 0 CONCLUSION 2 5 8 11 14 17 20 Harmonic order 23 26 A practical dead-time effects compensation method for PMSM drive based on the device characteristics and the running conditions of the motor is proposed. Results of experiments are provided to demonstrate the effectiveness of the proposed method at different load torque and different reference speed, at the low speed and light load, the compensation effect is especially apparent. 29 Fig. 9: a-phase current and harmonious analysis without compensation at case 2 ACKNOWLEDGMENT Experimental results: The experimental conditions are considered here: This study is supported by the national science foundation of china (No.61143007) and Scientific Research Project of Liaoning province education department (No.L2010443). Case 1: TZ = 30 N.m, n* = 200 r/min Case 2: TZ = 70 N.m, n* = 200 r/min REFERENCES The current response wave and harmonious analysis at case 1, case 2 are given in Fig. 7, 8, 9 and 10. At case1, the THD of the current of phase a is 21.25% when 2263 Choi, J.W. and S.K. Sul, 1996. Inverter output voltage synthesis using novel dead time compensation. IEEE T. Pow. Electr., 11(2): 221-227. Res. J. Appl. Sci. Eng. Technol., 4(14): 2259-2264, 2012 Hyun-Soo, K., M. Hyung-Tae and Y. Myung-Joong, 2003. On-line dead-time compensation method using disturbance observer. IEEE T. Pow. Electr., 18(6): 1336-1345. Kim, H.W., H.S. Kim and M.J. Youn, 2004. Online observation and compensation of voltage distortion in PWM VSI for PMSM. IEEE Proc. Electr. Pow. Appl., 151(5): 534-542. Munoz, A.R. and T.A. Lipo, 1999. On-line dead-time compensation technique for open-loop PWM-VSI drives. 13th Annual APEC 198 Conference Proceedings, 1(1): 95-100. 2264 Wu, M., R. Zhao and X. Tang, 2005. Study of vectorcontrolled permanent magnet synchronous motor at low speed and light load. Trans. China Electrotech. Soc., pp: 87-92. Wang, G., Y. Yu and R. Yang, 2008. Dead-time compensation of space vector PWM inverter for induction motor. Proc. CSEE, 28(15): 79-83.