Research Journal of Applied Sciences, Engineering and Technology 4(13): 1903-1910,... ISSN: 2040-7467
advertisement
: 1903-1910,... ISSN: 2040-7467")
Research Journal of Applied Sciences, Engineering and Technology 4(13): 1903-1910, 2012
ISSN: 2040-7467
© Maxwell Scientific Organization, 2012
Submitted: January 02, 2012
Accepted: March 02, 2012
Published: July 01, 2012
Dynamical Test and Modeling for Hydraulic Shock Absorber on Heavy Vehicle
under Harmonic and Random Loadings
Shaohua Li, Yongjie Lu and Liyang Li
Mechanical Engineering School, Shijiazhuang Tiedao University, Shijiazhuang 050043, China
Abstract: The aim of this study is to found the suitable loading condition during damper dynamic test and
develop a testing and analysis methodology for obtaining the dynamic properties of shock absorbers for use
in vehicle dynamic simulation. Using harmonic and random loadings, the dynamical characteristics of a
hydraulic shock absorber on heavy vehicle are measured and analyzed. Based on the test data, a piecewise nonlinear model for the shock absorber is proposed and the model parameters are identified under different
loadings. By comparing the simulation results and field test data of the vehicle responses, the effect of loading
type during the test of shock absorber on model accuracy is researched. Thus it is possible to choose a suitable
loading mode to impel the piston of the shock absorber and build a reasonable absorber model used in vehicle
dynamic simulation.
Key words: Modeling, random loading, shock absorber, test, vehicle dynamics
C
INTRODUCTION
Due to high-speed and heavy duty of road
transportation, people put forward higher requirements on
the handling and ride comfort performances of a vehicle.
The hydraulic shock absorber for vehicle is one of major
factors influencing the handling and ride comfort and
shows apparent nonlinearity, asymmetry and hysteresis.
Modeling dynamic properties of shock absorbers is very
important to allow investigation of vehicle dynamics and
control the vehicle vibration.
In the last forty years, many dynamic models for
shock absorber have been proposed, which can be divided
into three types:
C
C
The parametric model: This model is expressed by
the fluid-structure interacted ordinary differential
equations (ODE) or partial differential equations
(PDE). The real working conditions of shock
absorber include the flow of oil within the shock
absorber, the deformation of elastic element in
throttle and so on. Due to considering the above
conditions, the parametric model is very accurate and
thus has attracted many scholars attention (Adrian,
2002; Samantaray, 2009; Titurus et al., 2010; Czop
and Slawik, 2011). However, the parametric model
has too many parameters and the equations are very
difficult to solve. Thus this type of model is often
used in damper design and seldom used in vehicle
dynamic simulation.
The equivalent parametric model: This model
simplifies the damper into a combination of spring,
damping, clearance, friction and other mechanical
property components. The representative equivalent
parametric models include Bouc-Wen model,
(Besinger et al., 1995) model, Bingham model and so
on (Besinger et al., 1995; Dyke et al., 1996; Yang
et al., 2005; Zubieta et al., 2009). Due to simple form
and fewer parameters, these models have been
widely used in vehicle dynamic research. However,
parameters of the equivalent parametric model are
sensitive to loading amplitude and frequency and
thus the model is mainly applicable to a single
frequency excitation.
The fitted model: The model regards the restoring
force as a function of the relative displacement and
velocity, without taking shock absorber structure and
working conditions into account. The restoring force
and displacement of shock absorber are tested under
different loads and the function is fitted by test data
(Cafferty et al., 1995; Kowalski et al., 2002; Worden
et al., 2009). The fitted model is quite suitable to
modeling the ascertained shock absorber, but needs
a large amount of experimental work.
Since the road surface roughness is random
distributed, the automobile shock absorber practically
always works under random excitations. However the
current industry standard method of characterizing the
dynamic properties of shock absorbers only involves
Corresponding Author: Shaohua Li, Mechanical Engineering School, Shijiazhuang Tiedao University, Shijiazhuang 050043,
China, Tel.: 0086-311-87935554
1903
Res. J. Appl. Sci. Eng. Technol., 4(13): 1903-1910, 2012
testing at harmonic excitations with discrete frequencies
and amplitudes. The study on modeling the shock
absorber under non-harmonic or random loadings is
seldom found (Cafferty et al., 1995; Kowalski et al.,
2002).
In this study, the dynamic properties of a shock
absorber on the front suspension of a heavy-duty truck are
tested and analyzed under both sinusoidal and random
loadings. A fitted piecewise non-linear model for this
shock absorber is proposed and the parameters of this
model are indentified using test data under different
loadings. By comparing vehicle simulation results with
the field test data, the effect of excitation condition in
damper dynamic test on model accuracy is investigated.
Thus it is possible to found the suitable loading conditions
during dynamic test and modelling for a damper.
TEST FACILITY AND PROCEDURES
The test object is a shock absorber on front
suspension of the heavy-duty truck DFL1250A9
manufactured by Dongfeng Motor Corporation Ltd.,
China. The shock absorber is fixed onthe dynamic
material testing machine HT-911, as shown in Fig. 1. The
restoring force and relative displacement of the shock
absorber are measured by a load cell and a
displacement transducer fixed at the end of the damper.
The loading conditions on the test platform include
sinusoidal and random displacement excitations. The
frequency and amplitude of the sinusoidal excitation are
kc
K
cc
C
Fig. 1: The test machine
set at 0.5, 1.0, 1.5, 2.0, 2.5 Hz and 5, 10, 15, 20 mm
respectively.
An eight degree-of-freedom (8DOF) vehicle model
with B-class random road surface roughness according to
GB/T7031-2005/ISO8608:1995 (SAC, 2005) is built and
shown in Fig. 2 the equations of motion for the vehicle
system are:
[ M ]{Z} [C]{Z } [ K ]{Z} [ Kt ]{Q} [Ct ]{Q } (1)
where,
{Q} = [q1 q2 q3 q4]T ; {Z} = [Zc Zb 2 Zt1 Zt2 Zt3 Zt4]T
[M] = diag [mc mb Ip Ir mt1 mt2 mt3 mt4]
kc
l x kc
l y kc
0
0
0
ksi kc
k s1l1 k s2l2 k s3l1 k s4l2 kclx
k s1d f k s2dr k s3d f k s4 dr kcl y
k s1
k s2
k s3
k s1l12 k s2l22 k s3l12 k s4l22 kc1lx2
k s1l1d f k s2l2 dr k s3l1d f k s4l2dr kclx l y
k s1l1
k s2l2
k s3l1
Symmetry
k s1d 2f ks2dr2 ks3d 2f k s4 dr2 kcly2
ks1d f
k s1 kt 1
ks2 dr
0
k s 2 kt 2
ks3d f
0
0
k s3 k t 3
i 1
cc
lx cc
l y cc
0
0
0
csi cc
cs1l1 cs2l2 cs3l1 cs3l1 cclx
cs1d f cs2dr cs3d f cs4dr cclx l y
cs1
cs2
cs3
cs1l12 cs2l22 cs3l12 cs4l22 cclx2
cs1l1d f cs2l2dr cs3l1d f cs4l2dr cclx l y
cs1l1
cs2l2
cs3l1
Symmetry
cs1d 2f cs2d 2f cs3d 2f cs4d 2f ccd 2f
cs1d f
cs2dr
cs2d f
cs1 ct 1
0
cs2 ct 2
0
0
4
i 1
cs3 ct 3
T
0
0
Kt 0
0
0
0
0
0
0
0
0
0
0 k t1
0 0
0 0
0 0
0
kt2
0
0
0
0
kt3
0
0
0
0
kt4
;
0
0
Ct 0
0
1904
0
0
0
0
0
0
0
0
0 ct 1 0
0 0 ct 2
0 0
0
0 0
0
0
0
ct 3
0
0
0
0
ct 4
T
ks4
k s4l2
k s 4 dr
0
0
0
k s4 kt 4
0
4
cs4
cs4l2
cs4dr
0
0
0
cs4 ct 4
0
Res. J. Appl. Sci. Eng. Technol., 4(13): 1903-1910, 2012
zc
mc
y
z
kc
zb
dr
θ
lx
φ
mb
dr
cc
df
ly
x
df
l2
l1
cs1
ks1
zt1
m t1
kt2
c s4
ks4
c t2
zt4
cs3
ks3
q2
ct1
k t1
z t3
q1
m t3
m t4
kt4
c t3
kt3
c t4
q3
q4
Fig. 2: 8DOF whole-body vehicle model
mass center. Ksi, Kti Csi, Cti (I = 1~4) are stiffness and
damping coefficients of suspension and tire.
The parameters of the vehicle system are chosen as
follows:
mc = 557.5 kg, mb = 11485kg, Ip = 111004 kg.m2
Ir = 0.6 05 kg.m2, mt1 = mt3 = 412 kg, mt2 = mt4 = 1352
kg, Kc = 72460 N/m, KS1 = KS3 = 251280 N/m,
KS2 = KS4 = 1195 03 N/m, Kt1 = Kt3 = 1100 03 N/m
Kt2 = Kt4 = 3000×103 N/m, Cc = 7240 N.s/m,
CS1 = CS3 = 400 N.s/m, CS2 = CS4 = 200 N.s/m,
Ct1 = Ct3 = 3500 N.s/m, Ct2 = Ct4 = 6300 N.s/m,
df = 0.993 m, lx = 2.8 m, ly = 0.1 m, dr = 0.93 m,
l1 = 3.64 m, l2 = 2.71 m
10
5
0
-5
5
0
10
t/s
15
20
2
1
0
0
2
4
6
8
10
f/Hz
Fig. 3: The random loading condition
where Zc is the cab’s vertical displacement. Zb 2, are
vehicle body’s vertical, pitching and rolling
displacements. Zt1 Zt2 Zt3 Zt4 are wheel vertical
displacements. mc mb are mass of cab and vehicle body.
Ip, Ir are the moment of inertia of vehicle body in pitching
and rolling directions respectively. mt1, mt2 mt3 mt4 are
wheel masses. q1 q2 q3 q4 are road surface roughness. df ,
dr are half of front and rear wheeltrack. l1, l1, lx are the
longitudinal distance from the front wheel, rear wheel and
cab mass center to the vehicle mass center. ly are the
lateral distance from the cab mass center to the vehicle
The relative displacement between vehicle body and
wheel is used as the random excitation of the test platform
and computed by Eq. (1). The time-domain curves and
amplitude spectrum of the random loading are shown in
Fig. 3. Natural frequencies of the vehicle are also
computed by vibration theory, which are 0.8897, 1.3373,
1.9770, 2.5316, 8.8794, 9.0262, 9.1423 and 9.1170 Hz,
which corresponds to the chair vertical motion, the
vertical, pitching, and roll motion of vehicle body and the
vertical motion of four wheels respectively. It can be seen
from Fig. 3 that the frequency components of the platform
random loading mainly concentrate on the first four
natural frequencies of the vehicle. According to sampling
theory, the sampling frequency of this test is set 256 Hz.
DYNAMIC CHARACTERISTICS ANALYSIS
A traditional approach to characterization of the
nonlinearities present in the shock absorber is
accomplished by obtaining a force-velocity characteristic
diagram. Thus the force-displacement-velocity and
1905
Res. J. Appl. Sci. Eng. Technol., 4(13): 1903-1910, 2012
force-velocity trajectories with sinusoidal loading at five
frequencies and four amplitudes are obtained as shown in
Fig. 4 and 5.
In Fig. 4 and 5, the absorber shows nonlinearity,
asymmetry and hysterisity. It can be seen from Fig. 4 that:
6000
0.5Hz
1Hz
F/N
4000
1.5Hz
2Hz
2.5Hz
2000
0
-2000
-0.02
C
-0.01
0
0.01
0.2
0
-0.2
v/m/s
s/m
(a) The force-displacement-velocity trajectories
C
5000
0.5Hz
1Hz
4000
1.5Hz
2Hz
2.5Hz
F/N
3000
2000
C
1000
0
-0.2
-0.1
0
v/m/s
0.1
(b) The force-velocity trajectories
Fig. 4: Dynamic characteristics for sinusoidal test at different
frequencies (A = 10 mm)
6000
5mm
10mm
15mm
20mm
F/N
4000
2000
0
-2000
-0.04
-0.02
0
0.2
0
0.02
-0.2
s/m
v/m/s
(a) The force-displacement-velocity trajectories
4000
5mm
10mm
15mm
20mm
F/N
3000
The dynamic characteristic trajectories of shock
absorber for different excitation frequencies differ
considerably from each other. At equilibrium
position the difference between the trajectories is the
greatest; while at limit position the difference
between the trajectories is the smallest.
With the increase of excitation frequency, both the
damping force and the area surrounded by
trajectories increase. The rise of area means that the
energy consumed by the shock absorber increases. In
addition, the hysteretic behavior in force-velocity
trajectories become more distinct as the excitation
frequency increased.
At low excitation frequencies (f = 0.5, 1 Hz), the
friction damping characteristics of the shock absorber
are evident. When the excitation frequency is higher
(f = 1.5, 2, 2.5 Hz), the friction damping
characteristics disappeared and the saturated
phenomenon occurs.
It can be seen from Fig. 5 that, the characteristic
trajectories of shock absorber in different amplitudes are
basically parallel to each other and increase in amplitude
leads to the growth of the damping force and the energy
consumption. In addition, the saturated phenomenon
occurs in higher amplitude. When the velocity is greater
than 0.1 m/s, the damping force increased slowly.
Hence, the shock absorber characteristics depend on
both frequency and amplitude of the excitation. The effect
of excitation frequency on shock absorber characteristics
is bigger than that of excitation amplitude.
The absorber characteristic trajectories under random
excitation and sinusoidal excitation (A = 5 mm and f = 1
Hz) are shown in Fig. 6. The nonlinearity, asymmetry and
hysteresis are still present under random excitation.
However, the damping force distributes more widely and
the energy consumption is bigger under random
excitation.
2000
1000
0
-1000
-0.1
-0.05
0
v/m/s
0.05
0.1
(b) The force-velocity trajectories
Fig. 5: Dynamic characteristics for sinusoidal test at different
amplitudes (f = 1Hz)
A piecewise non-linear model: It is easy found from the
absorber characteristic trajectories that the damping force
predominantly depends on the position and velocity of the
piston. At the same displacement, two damping forces
may exist since the relative velocity between the piston
and cylinder can be positive or negative. Consequently,
the absorber shows hysteretic properties.
As shown in Fig. 7, the absorber characteristic curve
may be divided into four parts including AB, BC, CD and
DA, which correspond to four cases respectively.
1906
Res. J. Appl. Sci. Eng. Technol., 4(13): 1903-1910, 2012
Table 1: The identified parameters
Loadings
Sinusoidal loading
(A = 10mm, f = 1.5Hz)
Random loading
Groups
(1) v>0, s<0
Parameters
-------------------------------------------------------------------------------------------------C1
C2
C3
C4
16864.0
1970700.0
-271.0
4 2.8727
(2) v>0, s>0
(3) v<0, s>0
(4) v<0, s<0
(1) v>0, s<0
(2) v>0, s>0
(3) v<0, s>0
(4) v<0, s<0
43345.0
6554.6
1.282E-4
11548.0
11164.0
5436.4
6093.5
6.3451E
7.7967E-6
1463.7
405660.0
6987900.0
3395.9
6701.9
-5-452.51
-54.934
155.03
70.386
80.757
-65.316
-56.148
0.1
0.1
0.37728
2.4112
3.1197
13.429
10.38
B
3000
F/N
2000
1000
0
C
D
A
-1000
-0.1
-0.05
0
v/m/s
0.05
0.1
4000
B
F/N
2000
0
C
A
D
-2000
(a) The force-displacement-velocity trajectories
-0.01
-0.005
0
s/m
0.005
0.01
Fig. 7: Absorber characteristic curve segments
Based on the above analysis and Wallaschek model
(Wallaschek, 1990), a new exponential piecewise nonlinear model for the damper is proposed
F C1v C2 v
(b) The force-velocity trajectories
Fig. 6: Comparison of absorber characteristics under random
and sinusoidal loading (A = 5 mm, f = 1Hz)
C
C
C
C
v>0, s<0
v>0, s>0
v<0, s>0
v<0, s<0
A-B-C-D-A stands for a period of piston moving
from equilibrium position, through negative limit position,
equilibrium position and positive limit position, back to
equilibrium position. Accordingly, the test data can be
divided into four groups. According to every group of
data, the parameters are identified, respectively.
C4
Sgn(v ) C3 Sgn(v )
(2)
where the first term is the viscous damping force, the
second term denotes the hysteresis, and the third term is
friction damping force.
The four parameters in this model are identified using
the nonlinear least square method and listed in Table 1.
Figure 8 and 9 are the fitting results of test data under
sinusoidal loading (A = 10 mm and f = 1.5 Hz) and
random loading. It may be found that the fitting curve
computed by Eq. (2) is very close to the test result.
Vehicle dynamic simulation and field test: When the
vehicle runs on road, the shock absorber is acted on by
random loads with many frequencies composed of the
vehicle natural frequencies and frequencies of road
surface roughness. It is an urgent question waiting to be
solved that which loading condition should be used in
absorber dynamic properties test and modeling with the
aim of vehicle dynamics simulation.
1907
Res. J. Appl. Sci. Eng. Technol., 4(13): 1903-1910, 2012
4000
4000
test
compute
3000
2000
F/N
F/N
2000
1000
1000
0
-1000
-0.1
test
compute
3000
0
-0.05
0
v/m/s
0.05
-1000
-0.02
0.1
-0.01
0
0.01
s/m
Fig. 8: Fitting results under sinusoidal loading (A = 10 mm, f = 1.5Hz)
1000
1000
c ompute
tes t
500
F/N
F/N
500
0
-500
-0.1
0
-0.05
0
v/m/s
0.05
-500
-0.1
0.1
1000
-0.05
0
v/m/s
0.05
0.1
1000
test
c om pute
500
F/N
F/N
500
0
0
-5
0
s /m
5
-5
-3
x 10
0
s /m
5
x 10
-3
Fig. 9: Fitting results under random loading
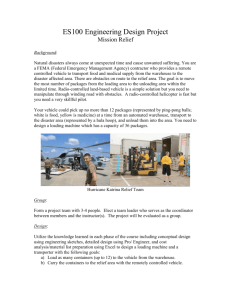
(a) The vehicle in the field test
(b) Acceleration transducer on cab seat
(c) Acceleration transducer on vehicle body
Fig. 10: The field test
The vertical accelerations at cab seat and vehicle
body of DFL1250A9 truck are measured in the field test,
as shown in Fig. 10. Using absorber models expressed by
Eq. (2) with parameters identified by test data under
different loading conditions, dynamic responses of the
8DOF vehicle are simulated by numerical integral. The
simulating accelerations and test results are compared in
Fig. 11. The loading conditions includes:
C
C
C
Random loading
f = 0.5, 1, 1.5, 2, 2.5 Hz with A = 10 mm
f = 5, 10, 15, 20 mm with f =1 Hz
It is found from Fig. 11 that:
C
1908
The test data of seat acceleration is the closest to the
simulation result by the absorber model under
Res. J. Appl. Sci. Eng. Technol., 4(13): 1903-1910, 2012
a2(m/s-2)
0.55
0.50
0.45
0.40
0.35
0.30
0.25
0.20
0.15
0.10
0.05
Test
Random
0.5 Hz
1.0 Hz
1.5 Hz
2.0 Hz
2.5 Hz
C
10
30
20
40
60
50
V/Km/h
80
70
C
(a) RMS of the seat acceleration
1.8
Test
Random
0.5 Hz
1.0 Hz
1.6
Nevertheless, it is suggested that the sinusoidal
loading with the frequency near to the lowest natural
frequency of vehicle and the random loading are the most
suitable loading condition in damper dynamic properties
test and modeling. In addition, the modeling method of
shock absorber proposed by this work may be used to
dynamic simulation of vehicles.
a 2(m/s-2)
1.4
1.5 Hz
2.0 Hz
2.5 Hz
1.2
1.0
0.8
0.6
0.4
0.2
10
20
30
40
50
V/Km/h
60
70
80
CONCLUSION
(b) RMS of the body acceleration
Test
Random
5 mm
0.50
0.45
a2(m/s-2)
0.40
model under sinusoidal loading condition with 0.5 Hz
leads to the maximum error between simulation
result and test data. The reason for this conclusion is
that the natural frequency of seat is 0.8897 Hz which
is near to 1 Hz and in random load signal the natural
frequency of seat share the largest energy. Thus, the
sinusoidal loading with the frequency near to the
natural frequency of seat and the random loading are
the most suitable to simulate the seat responses.
The effect of absorber model parameters on vehicle
body acceleration simulation is much smaller than
that on seat acceleration simulation.
The discrepancy between simulations results and the
test data may be caused by the error in measurement
and the factors not included in the 8DOF model such
as engine vibrations, chassis modes and so on.
By testing the shock absorber under sinusoidal and
random loading, a non-parametric model for shock
absorber is proposed and identified using test data. By
comparing simulation results and field test data, this work
tries to found the most suitable loading condition in
absorber dynamic properties test and modeling. It is
concluded that
10 mm
15 mm
20 mm
0.35
0.30
0.25
0.20
0.15
0.10
0.05
10
C
20
30
40
50
V/Km/h
60
70
80
C
(c) RMS of the seat acceleration
Test
Random
5 mm
1.8
1.6
10 mm
15 mm
20 mm
a2(m/s-2)
1.4
1.2
C
1.0
0.8
C
0.6
0.4
0.2
10
20
30
40
50
V/Km/h
60
70
80
The tested shock absorber shows nonlinearity,
asymmetry and hysteresis.
Since the damping force depends on the position and
velocity of piston, the test data should be divided into
four groups. Using each group of measured data, the
parameters of absorber model are identified
respectively. Different group of parameters should be
used to compute vehicle responses according to the
position and velocity of piston.
In absorber modeling, the loading frequency plays a
more important role than the loading amplitude.
The sinusoidal loading with the frequency near to the
lowest natural frequency of vehicle and the random
loading may be the suitable loading condition in
damper dynamic properties test and modeling.
ACKNOWLEDGMENT
(d) RMS of the body acceleration
Fig. 11: Comparison of simulation results and test results
sinusoidal loading with 1 Hz. The absorber model under
random loading condition goes after that. The absorber
The National Natural Science Foundation of China
under Grant No.10932006, 11072159 and Key Project of
Chinese Ministry of Education under Grant No.210023
support this study.
1909
Res. J. Appl. Sci. Eng. Technol., 4(13): 1903-1910, 2012
REFERENCES
Adrian, S., 2002. The Influence of Damper Properties on
Vehicle Dynamic Behavior. Society of Automotive
Engineers paper: 2002-01-0319.
Besinger, F.H., D. Cebon and D.J. Cole, 1995. Damper
models for heavy vehicle ride dynamics. Vehicle
Syst. Dyn., 24(1): 35-64.
Cafferty, S., K. Worden and G. Tomlinson, 1995.
Characterization of automotive shock absorbers using
random excitation. P. I. Mech. Eng., Part D- J. Aut.
Eng., 209: 239-248.
Czop, P. and D. Slawik, 2011. A high-frequency firstprinciple model of a shock absorber and servohydraulictester. Mech. Syst. Signal Pr., 25:
1937-1955.
Dyke S.J., B.F. Spencer and M.K. Sain, 1996. Modeling
and control of magnetorheological dampers for
seismic response reduction. Vtt. Symp., 5: 565-575.
Kowalski, D., M.D. Rao and J. Blough, 2002. Dynamic
testing of shock absorbers under non-sinusoidal
conditions. P. I. Mech. Eng, Part D-J. Aut. Eng., 216:
373-384.
Standardization Administration of the People Republic of
China (SAC), 2005. GB/T7031-2005/ISO8608:1995,
Mechanical Vibration-Road Surface ProfilesReporting of measured data.
Samantaray, A.K., 2009. Modeling and analysis of
preloaded liquid spring/damper shock absorbers.
Simul. Modell. Pract. Th., 17: 309-325.
Titurus, B., J.D. Bois and N. Lieven, 2010. A method for
the identification of hydraulic damper characteristics
from steady velocity inputs. Mech. Syst. Signal Pr.,
24: 2868-2887.
Wallaschek, J., 1990. Dynamics of non-linear automobile
shock-absorbers. Int. J. Nonlin. Mech., 25(2-3):
299-308.
Worden, K., D. Hickey and M. Haroon, 2009. Nonlinear
system identification of automotive dampers: A time
and frequency-domain analysis. Mech. Syst. Signal
Pr., 23: 104-126.
Yang S.P., S.H. Li and X.F. Wang, 2005. A Hysteresis
Model for Magneto-rheological Damper. Int. J.
Nonlin. Sci. Num., 6(2): 139-144.
Zubieta, M., M.J. Elejabarrieta and M.M. Bou-Ali, 2009.
Characterization and modeling of the static and
dynamic friction in a damper. Mech. Mach. Theory,
44: 1560-1569.
1910