Mathematics 369 Homework (due Feb 15) 25) 26)
advertisement
 25) 26)")
Mathematics 369
Homework (due Feb 15)
A. Hulpke
25) Which of the following functions R2 → R3 are linear? Justify your answer.
a) (x, y)T 7→ (0, x − y, x + y)T
b) (x, y)T 7→ (xy, 0, (x + 1)(y + 1))T
c) (x, y)T 7→ (x + 1, y + 1, 3)T
d) (x, y)T 7→ (−y, −x, 3x − 7y)T
26) Let B = {(1, 0, 1)T , (0, 1, 3)T } ⊂ R3 and V = Span(B). Let C = {c1 = (1, 2, 7)T , c2 =
(3, 4, 15)T }. (You may assume that B and C both are linearly independent.)
a) Show that Span(C) = V . Explain your reasoning.
b) Determine B [id]C and C [id]B .
c) Determine [3c1 + 5c2 ]B .
23∗ ) Let A ∈ Fm×n , B ∈ Fn×k .
a) Show that CS(AB) ≤ CS(A).
b) Show that RS(AB) ≤ RS(B).
c) Conclude that rank(AB) ≤ min(rank(A), rank(B)).
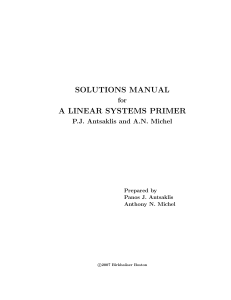
28)∗ (E U LE R angles – this is a standard problem in mechanics when describing a spinning top) Let V = R3 and B = (i, j, k) the standard basis. To represent an object that has been
rotated, we want to work in another system of coordinates with basis vectors E = (i0 , j0 , k0 ).
The aim of this exercise is to determine the matrix E [id]B that describes how to change
B-coordinates into E-coordinates:
We first rotate an angle φ around the k-axis
and get a new basis C = (I, J, K) (Note: k =
K).
This gives: i = cos(φ)·I−sin(φ)·J, j = cos(φ)·
J + sin(φ)
· I. Thus the base change
matrix is
cos(φ) sin(φ) 0
− sin(φ) cos(φ) 0 .
C [id]B =
0
0
1
We then rotate by an angle θ around the Iaxis and obtain a basis D = (I0 , J0 , K0 ) with
I0 = I.
Finally, we rotate by an angle ψ around the
K0 -axis and obtain the basis E = (i0 , j0 , k0 )
with k0 = K0 .
Compute the base change matrices D [id]C and E [id]D and use these to determine E [id]B .
Problems marked with a ∗ are bonus problems for extra credit.