AN A POSTERIORI–A PRIORI ANALYSIS OF MULTISCALE OPERATOR SPLITTING
advertisement

SIAM J. NUMER. ANAL.
Vol. 46, No. 3, pp. 1116–1146
c 2008 Society for Industrial and Applied Mathematics
AN A POSTERIORI–A PRIORI ANALYSIS OF MULTISCALE
OPERATOR SPLITTING∗
D. ESTEP† , V. GINTING‡ , D. ROPP§ , J. N. SHADID¶, AND S. TAVENER‡
Abstract. In this paper, we analyze a multiscale operator splitting method for solving systems
of ordinary differential equations such as those that result upon space discretization of a reactiondiffusion equation. Our goal is to analyze and accurately estimate the error of the numerical solution,
including the effects of any instabilities that can result from multiscale operator splitting. We present
both an a priori error analysis and a new type of hybrid a priori–a posteriori error analysis for an
operator splitting discontinuous Galerkin finite element method. Both analyses clearly distinguish between the effects of the operator splitting and the discretization of each component of the decomposed
problem. The hybrid analysis has the form of a computable a posteriori leading order expression and
a provably higher order a priori expression. The hybrid analysis takes into account the fact that the
adjoint problems for the original problem and a multiscale operator splitting discretization differ in
significant ways. In particular, this provides the means to monitor global instabilities that can arise
from operator splitting.
Key words. a posteriori error analysis, adjoint problem, discontinuous Galerkin method, generalized Green’s function, goal oriented error estimates, multiscale method, operator decomposition,
operator splitting, reaction-diffusion equations, residual
AMS subject classifications. 65N15, 65N30, 65N50
DOI. 10.1137/07068237X
1. Introduction. Operator decomposition is perhaps the most widely used technique for solving multiscale, multiphysics problems. The general approach is to decompose a model into components involving simpler physics over a relatively limited
range of scales, and then to seek the solution of the entire system by using numerical
solutions of the individual components. This approach has many appealing aspects.
For example, it capitalizes on the significant progress that has been made on the stable, accurate, and efficient solution of a broad spectrum of single-physics problems.
It provides an avenue to use highly evolved legacy codes to tackle multiphysics problems. It also provides a natural way to tackle problems encompassing multiple time
and length scales.
The classic example of operator decomposition is operator splitting for reactiondiffusion equations. The generic picture is a relatively fast, destabilizing reaction
component interacting with a relatively slow, stabilizing diffusion component. Accuracy considerations dictate the use of relatively small steps to integrate the reaction
component. On the other hand, stability considerations over moderate to long time
∗ Received by the editors February 12, 2007; accepted for publication (in revised form) November
12, 2007; published electronically March 7, 2008.
http://www.siam.org/journals/sinum/46-3/68237.html
† Department of Mathematics and Department of Statistics, Colorado State University, Fort
Collins, CO 80523 (estep@math.colostate.edu). This author’s work was supported in part by the
Department of Energy (DE-FG02-04ER25620, DE-FG02-05ER25699), the National Aeronautics and
Space Administration (NNG04GH63G), the National Science Foundation (DMS-0107832, DGE0221595003, MSPA-CSE-0434354), and the Sandia Corporation (PO299784).
‡ Department of Mathematics, Colorado State University, Fort Collins, CO 80523 (ginting@math.
colostate.edu, tavener@math.colostate.edu). The work of these authors was supported in part by the
Department of Energy (DE-FG02-04ER25620).
§ SAIC, 4001 Fairfax Dr., Arlington, VA 22203 (DAVID.L.ROPP@saic.com).
¶ Computational Sciences R&D Group, Sandia National Laboratories, P.O. Box 5800, MS0316,
Albuquerque, NM 87185 (jnshadi@sandia.gov).
1116
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1117
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
2
10
1.5
10
L2 norm of error
Operator Split Solution
intervals suggest the use of implicit, dissipative numerical methods for integrating
diffusion problems. Such methods are expensive to use per step, but relatively large
steps can be used on a purely dissipative problem. If the reaction and diffusion components are integrated together, then the small steps required for accurate resolution
of the reaction lead to an expensive computation.
In a multiscale operator splitting approach, the reaction and diffusion components
are integrated independently inside each time interval of a discretization of time and
“synchronized” in some fashion only at the nodes of the interval. The reaction component is often integrated by using significantly smaller substeps (e.g., 10−5 smaller
is not uncommon) than those used to integrate the diffusion component, which can
lead to a tremendous computational savings.
However, operator decomposition presents an entirely new set of accuracy and
stability issues, some obvious, some subtle, and all difficult to correct. In the case
of operator splitting, the instantaneous interaction between reaction and diffusion
is discretized and this has a strong effect on accuracy and stability, even if each
component is solved exactly. For example, consider the instability observed in the
Brusselator problem [28, 27].
1
0.5
0
10
10
10
0
-1
-2
-3
-4
pe
slo
-0.5
0
0.2
0.4
0.6
0.8
Spatial Location
1
10
t = 6.4
t = 16
t = 32
t = 64
t = 80
1
-5
-3
10
-2
10
-1
10
0
10
Time Step Size
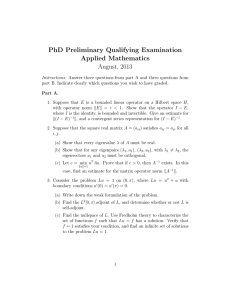
Fig. 1.1. The left-hand plot illustrates typical instability that can arise from multiscale operator
splitting applied to the Brusselator problem. Solution is shown at time 80. On the right, we show
plots of the error in the L2 norm versus time step size at different times.
Example 1.1. We illustrate the instability of operator splitting applied to the
Brusselator problem in Figure 1.1. We apply a standard first order splitting scheme
to a space discretization of the Brusselator model with 500 discrete points (see (6.6)
in section 6 with α = .6, β = 2, k1 = k2 = .025). We integrate using the trapezoidal
rule with time step of .2 for the diffusion and backward Euler with time step of .004
for the reaction. On the left of Figure 1.1, we show a numerical solution that exhibits
nonphysical oscillations that developed after some time. On the right, we show plots
of the error versus time steps at different times. There is a critical time step above
which the instability develops. Moreover, changing the space discretization does not
improve the accuracy. In [25, 28], it is demonstrated that a finer spatial discretization
for a constant time step size leads to significantly more error in the long time solution.
The observed instability is a direct consequence of the operator splitting, which in
effect separates the stabilizing effect of the diffusion component from the destabilizing
reaction component.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1
10
1118
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
Beginning with the classic work of Marchuk and Strang, there is a highly developed literature devoted to a priori convergence analysis of operator splitting for
reaction-diffusion equations; see, for example, [32, 23, 5, 20, 31, 34, 8] and the references therein. Almost all of the classic literature assumes that the time steps for the
reaction and diffusion components are comparably sized, though Dawson and Wheeler
consider multiscale operator splitting for convection-reaction-diffusion problems in [5].
There are also studies of stability properties of various operator splitting procedures;
see, for example, [21].
All of the existing convergence analysis is carried out under assumptions that, if
strictly enforced, would prevent instabilities arising from the operator splitting discretization. However, enforcing such requirements presents serious problems on both
theoretical and practical grounds. This provides the motivation to seek an a posteriori
error analysis that devises a computational basis for detecting and correcting instabilities and inaccuracies arising from operator splitting as a particular computation
proceeds.
To simplify the presentation, we consider a simple example of operator splitting
applied to a model system of ordinary differential equations of the following form:
find y ∈ Rl , l ≥ 1, such that
ẏ = Ay(t) + F (y(t)), 0 < t ≤ T,
(1.1)
y(0) = y0 ,
where A is an l × l constant matrix representing a “diffusion component” and F (y) =
(F1 (y), F2 (y), . . . , Fl (y)) is a vector of nonlinear functions representing a “reaction
component.”
Example 1.2. Such a system arises after semidiscretization of a reaction-diffusion
governed by the initial boundary value problem,
⎧
∂u
⎪
⎪
x ∈ Ω, 0 < t,
⎨ ∂t = Δu + f (u),
(1.2)
suitable boundary conditions, x ∈ ∂Ω, 0 < t,
⎪
⎪
⎩
u(·, 0) = u0 (·),
where Ω ⊂ Rd is a spatial domain. For example, using a continuous, piecewise linear
finite element method for a Dirichlet problem with Ne elements, we obtain the initial
value problem (1.1). The unknown y consists of the vector of nodal values of the
finite element solution with dimension Ne − 1, and A is a symmetric negative definite
sparse matrix.
Our results extend in a straightforward way to different operator splitting schemes
and differential equations with a nonlinear diffusion component, e.g., ẏ = FD (y) +
FR (y), albeit at the cost of complicated notation. Formally, our approach also extends
directly to reaction-diffusion problems (1.2) where the splitting is carried out at the
continuous differential equation level followed by the discretization independently for
each component. A technical issue is dealing with the finite-dimensional representation of the reaction component, which is an ordinary differential equation in a Banach
space when the reaction is decoupled from the diffusion.
Our main goal is to derive a computable a posteriori expression that accurately
estimates the error in a specified quantity of interest computed from a multiscale
operator splitting approximate solution of (1.1). The a posteriori analysis is based
on duality, adjoint operators, and variational analysis [14, 15, 13, 10, 11, 17, 24, 29].
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
1119
To deal with operator splitting, we distinguish the effects of operator splitting from
the effects of numerical discretization of the components. The latter can be treated
with the standard a posteriori analysis. Estimating the error arising from operator
splitting requires a new approach.
A main technical issue is the definition of a suitable adjoint problem. The standard approach in error analysis is to form an implicit equation for the error, linearize this problem around an average of the true and approximate solutions using
the integral mean value theorem, and then employ the unique adjoint to this linearized error equation [17]. This approach generally works for implicit discretizations, for which the differential operator and its discretization are close in some
sense. This approach generally fails or requires significant modification for other
discretizations, e.g., explicit, multistep, and implicit/explicit schemes. Indeed, the
solution operator for many classes of numerical schemes is associated with different adjoint operators than the solution operator for the original problem. This is
particularly true for operator decomposition methods, which are generally associated with radically different adjoint operators than the forward problem (see below and [2, 18]). This is one important reason, perhaps unrecognized, why previous a posteriori analyses of evolution problems have focused on fully implicit time
integration methods.
Because an adjoint problem carries the global stability information about the
quantity of interest computed from the solution, accounting for the differences between adjoint problems associated with the original problem and a numerical discretization is critical for obtaining accurate error estimates. In the estimate derived below, this difference takes the form of “residuals” between certain adjoint
operators associated with the fully coupled problem and an analytic operator split
version. A practical difficulty with such a result is that solving the adjoint for
the fully coupled problem poses the same multiphysics challenges as solving the
original forward problem. We therefore develop a new hybrid a priori–a posteriori estimate that combines a computable leading order expression obtained using
a posteriori arguments with a provably higher order bound obtained using a priori
convergence result.
The rest of the paper is organized as follows. In section 2, we formulate the
analytic operator splitting procedure for (1.1) and conduct a preliminary investigation
of the instability in operator splitting using an illuminating “blow up” problem. We
present a multiscale operator splitting Galerkin finite element method for (1.1) in
section 3. We begin the analysis by presenting the results of an a priori convergence
analysis of the finite element method in section 4. The main result of the a posteriori
analysis of the operator splitting finite element method is presented in section 5,
followed by several numerical examples in section 6. In section 7, we give the details
of proof of the a priori result. Finally, in section 8, we present a conclusion.
2. Analytic operator splitting. In this section, we define an analytic operator
splitting version of (1.1). We first discretize [0, T ] into 0 = t0 < t1 < t2 < · · · < tN =
N
T with diffusion time steps {Δtn }n=1 , Δtn = tn − tn−1 , and Δt = max1≤n≤N (Δtn ).
For the first discretization, we introduce a theoretical discretization in which each
component is solved exactly. We define a piecewise continuous approximate solution
(2.1)
ỹ(t) =
tn − t
t − tn−1
ỹn−1 +
ỹn ,
Δtn
Δtn
tn−1 ≤ t ≤ tn ,
with nodal values ỹn obtained from the following procedure.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1120
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
Algorithm 2.1 (analytic operator splitting).
• Set ỹ0 = y0 .
• For n = 1 to N
– Compute y r (t−
n ) satisfying the reaction component
ẏ r = f (y r (t)), tn−1 < t ≤ tn ,
(2.2)
y r (t+
n−1 ) = ỹn−1 .
– Compute y d (t−
n ) satisfying the diffusion component
ẏ d = Ay d (t), tn−1 < t ≤ tn ,
(2.3)
r −
y d (t+
n−1 ) = y (tn ).
– Set ỹn = y d (t−
n ).
end for
Example 2.2. To provide motivation, we consider a problem in which the reaction
component exhibits finite time blow up when undamped by the diffusion component.
The problem is
ẏ + λy = y 2 ,
t > 0,
(2.4)
y(0) = y0 ∈ R,
which has the exact solution
(2.5)
y(t) =
λy0
y0 − (y0 − λ) eλt
when λ = 0. The exact solution exists for all time and tends to zero as t → ∞ when
λ > y0 . On the other hand, there is finite time blow up if λ < y0 .
Applying the analytic operator splitting (2.2), (2.3) to (2.4), the solutions of the
two components and the true solution are
y r (t) =
1−
d−
yn−1
,
d−
yn−1 (t − tn−1 )
y d (t) = e−λ(t−tn−1 ) ynr− ,
ỹn =
e−λΔtn ỹn−1
1 − Δtn ỹn−1
when the reaction component is defined. We see that splitting off the smoothing effect
provided by instantaneous interaction with the diffusion component means that the
reaction component can blow up in finite time.
The different behavior of the reaction and diffusion components introduces a
difference in scales. Consider λ = 2 with initial condition y0 = 1, so y(t) = 2/(1+e2t ).
This solution has an asymptotic decay rate proportional to e−2t , i.e., an asymptotic
decay time scale of 1/2. This same asymptotic behavior is observed for any y0 < 2.
The solution to the diffusion equation, y d (t) = e−2(t−tn−1 ) ynr− , has a fixed decay
rate proportional to e−2(t−tn−1 ) , i.e., a fixed decay time scale τD = 1/2. However,
d−
d−
the solution to the reaction equation, y r (t) = yn−1
/(1 − yn−1
(t − tn−1 )), becomes
d−
d−
unbounded at t = tn−1 + 1/yn−1 for all yn−1 > 0, and has a doubling time equal
d−
d−
d−
), suggesting a reaction time scale τR = 1/yn−1
. If yn−1
1,
to tn−1 + 1/(2yn−1
d−
τR > τD . If yn−1 ≈ λ, τR ≈ τD , but the reaction time scale is not constant and
decreases rapidly as the reaction progresses independently undamped by diffusion.
Operator splitting has created two uncoupled problems with very different stability
properties and with very different time scales. Furthermore, the time scales are not
clearly separated nor do they remain in constant proportion. The time scale τD is
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1121
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
Solution
Solution
0.8
0.6
0.4
2
1.5
1.5
1
0
0.5
1
time
0
2
1.5
1
0.5
0.5
0.2
0
2
Solution
1
0
0.5
1
time
0
2
1.5
0
1
time
0.5
1.5
2
Fig. 2.1. Plots of the solution ỹ and the true solution. Left: N = 50, M = 1. Middle: N = 10,
M = 5. Right: N = 5, M = 10. The nodal values of ỹ are denoted by the larger points, while the
smaller points denote node values of the reaction components on the mesh used for the reaction.
related to the time scale of the coupled process in the limit of small solutions, but the
time scale τR is completely unrelated.
On the left side of Figure 2.1, we plot the true solution and the nodal values of
the approximation ỹ for N = 50 diffusion steps and M = 1 reaction step per diffusion
step. The approximation is reasonably accurate.
Next, we increase the diffusion step by choosing N = 10 and, in order to maintain
the same resolution, we correspondingly increase to M = 5. In Figure 2.1, we plot ỹ,
the reaction component y r , and the true solution.
The node values of ỹ are relatively close to those of y. The subsequent nodal
values of the reaction component solution y r inside each step move away from the
true solution. This large departure is somewhat counteracted by application of the
diffusion operator. The multiscale reaction components exhibit significant growth
inside each diffusion step, which severely affects accuracy.
If we increase the diffusion step by taking N = 5 and maintain resolution in
the reaction component by taking M = 10, the approximation becomes even less
accurate. In Figure 2.1, we plot ỹ, the reaction component y r , and the true solution.
If we increase the diffusion step further, then the reaction component actually blows
up inside a diffusion step.
3. A multiscale operator splitting finite element method. We first discretize [0, T ] into 0 = t0 < t1 < t2 < · · · < tN = T with diffusion time steps
N
{Δtn }n=1 , Δtn = tn − tn−1 , and Δt = max1≤n≤N (Δtn ). For each diffusion step,
we choose a (small) time step Δsn = Δtn /Mn with Δs = max1≤n≤N (Δsn ), and the
nodes tn−1 = s0,n < s1,n < · · · < sMn ,n = tn (see Figure 3.1). We associate the time
intervals In = [tn−1 , tn ] and Im,n = [sm−1,n , sm,n ] with these discretizations.
t0
Diffusion Integration:
Reaction Integration:
s0,1
Δt1
t1
Δt2
t2
Δt3
t3
Δt4
Δs1
s0,2
...
sM ,2
2
Δs3
s0,4
...
sM ,1
1
Δs2
s0,3
...
...
t4
Δt5
t5
sM ,4
4
sM ,3
3
Fig. 3.1. Discretization of time used for multiscale operator splitting.
We observe that an operator splitting discretization is actually a consistent discretization of the analytic operator split problem, that is, a consistent discretization
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1122
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
of (2.2) followed by a consistent discretization of (2.3). Since the a posteriori analysis is based on the framework of variational formulation and adjoint problems, we
formulate the discretization as a discontinuous Galerkin (dG) finite element method
in time [7, 6, 13, 16, 17].
The variational formulation of (1.1) reads, for n = 1, . . . , N , find y d ∈ C 1 (In )
such that
⎧
⎨
˙
d
(y , v) dt =
(Ay d , v) dt for all v ∈ C 1 (In ),
(3.1)
In
In
⎩ d +
y (tn−1 ) = y r (t−
n ),
where y r ∈ C 1 (In ) satisfies
⎧
⎨
(3.2)
(F (y r ), w) dt for all w ∈ C 1 (In ),
(y˙r , w) dt =
I
⎩ rn +
y (tn−1 )
In
= ỹn−1 ,
and we set ỹn = ynd− . The finite element approximate solutions are sought in piecewise
polynomial spaces,
V (qd ) = U : U |In ∈ P (qd ) (In ), 1 ≤ n ≤ N ,
V (qr ) (In ) = U : U |Im,n ∈ P (qr ) (Im,n ), 1 ≤ m ≤ Mn
for n = 1, . . . , N , and In = [tn−1 , tn ] and Im,n = [sm−1,n , sm,n ]. P (qd ) (In ) denotes
the space of polynomials in Rl of degree qd on In . A similar definition holds for
P (qr ) (Im,n ). We let Un+,− denote the left- and right-hand limits of U at tn and
[U ]n = Un+ − Un− the jump value of U at tn .
Let Ỹ (t) be the piecewise continuous finite element approximation of the operator
splitting with
Ỹ (t) =
t − tn−1
tn − t
Ỹn−1 +
Ỹn ,
Δtn
Δtn
tn−1 ≤ t ≤ tn .
The nodal values Ỹn are obtained from the following procedure.
Algorithm 3.1 (multiscale operator splitting finite element method).
• Set Ỹ0 = y0 .
• For n = 1 to N
r−
– Set Y0,n
= Ỹn−1 .
– For m = 1 to Mn compute Y r |Im,n ∈ P (qr ) (Im,n ) satisfying
(3.3)
Y˙ r , W
Im,n
+
dt + [Y r ]m−1,n , Wm−1
(F (Y r ), W ) dt for all W ∈ P (qr ) (Im,n ).
=
Im,n
end for
d−
r−
– Set Yn−1
= YM
.
n ,n
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
1123
– Compute Y d |In ∈ P (qd ) (In ) satisfying
(3.4)
+
(Y˙d , V ) dt + [Y d ]n−1 , Vn−1
In
=
(AY d , V ) dt for all V ∈ P (qd ) (In ).
In
– Set Ỹn = Ynd− .
end for
In general, the dG method using polynomials of degree q converges with order up
to q + 1 at all points t, while its nodal values from the left converge with order up to
2q + 1 under certain conditions; see [11, 13].
Example 3.2. For qr = qd = 0,
r−
F (Y r ) dt → F (Ym−1,n
) Δsn ,
Im,n
AY d dt → AYnd− Δtn .
In
The dG approximations for the two components are
r−
r−
r−
Ym,n
= Ym−1,n
+ F (Ym−1,n
) Δsn ,
d−
Ynd− = Yn−1
+ AYnd− Δtn .
The former is equivalent to the forward Euler scheme, while the latter is equivalent
to the backward Euler scheme.
By employing quadrature formulas to evaluate the integrals in (3.3) and (3.4),
many popular finite difference schemes can be described using this variational framework; see [7, 6, 16, 17]. Using quadrature requires a straightforward extension of the
a posteriori analysis presented below. The results also extend easily to higher order
dG methods as well as the continuous Galerkin (cG) method [15, 17].
Example 3.3. We can use the dG qd = 0 for the diffusion component and the
cG qr = 1 implemented with the trapezoidal rule to obtain the reaction component
approximation
r
r
Ym,n
= Ym−1,n
+
1
r
r
Δsn F (Ym−1,n
) + F (Ym,n
) ,
2
which is equivalent to the Crank–Nicolson scheme.
4. An a priori convergence analysis. In this section, we carry out an a priori
convergence analysis for the multiscale operator splitting dG finite element method.
We require this convergence result for the hybrid a posteriori–a priori error analysis. The convergence analysis uses familiar tools from standard results for difference
schemes. However, we carry out the analysis in an unusual way by using the analytic
operator split problem (2.2) and (2.3) directly.
The goal is to estimate the global error (y − Ỹ ) = (y − ỹ) + (ỹ − Ỹ ), which we
decompose as the sum of the error due to the analytical operator splitting and the
error due to the numerical discretization of the components of the problem. We give
estimates of these two errors in Theorems 4.2 and 4.4, respectively, and combine these
in Theorem 4.5.
l
For y ∈ Rl , we define the Euclidean norm as |y|2 = i=1 |yi |2 .
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1124
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
4.1. A priori error analysis of analytic operator splitting. With yn =
y(tn ), we write the Taylor expansion of y(t) solving (1.1) around tn−1 as
(4.1) y(t) = yn−1 + (t − tn−1 ) (Ayn−1 + F (yn−1 ))
1
+ (t − tn−1 )2 (A + F (yn−1 ))(Ayn−1 + F (yn−1 )) + O(Δt3n ),
2
where F (y) denotes the Jacobian of F (y). Similarly,
r+
r+
ynr− = yn−1
+ Δtn F (yn−1
)+
and
ynd−
=
1 2 r+
r+
) + O(Δt3n )
Δt F (yn−1 ) F (yn−1
2 n
1 2 2
d+
3
I + Δtn A + Δtn A + O(Δtn ) yn−1
.
2
d+
r+
Since yn−1
= ynr− , yn−1
= ỹn−1 , and ỹn = ynd− , we have
(4.2) ỹn = ỹn−1 + Δtn (Aỹn−1 + F (ỹn−1 ))
1
+ Δt2n A2 ỹn−1 + 2AF (ỹn−1 ) + F (ỹn−1 ) F (ỹn−1 ) + O(Δt3n ).
2
Furthermore, substitution of (4.2) in (2.1) yields a representation of ỹ(t) with
tn−1 ≤ t ≤ tn :
(4.3) ỹ(t) = ỹn−1 + (t − tn−1 ) (Aỹn−1 + F (ỹn−1 ))
1
+ Δtn (t − tn−1 ) A2 ỹn−1 + F (ỹn−1 ) F (ỹn−1 ) + 2AF (ỹn−1 ) + O(Δt3n ).
2
Lemma 4.1. In the case of ỹn−1 = yn−1 ,
2
|yn − ỹn | ≈ O(Δtn ) and
|y(t) − ỹ(t)| dt ≈ O(Δt3n ).
In
Proof. With ỹn−1 = yn−1 , (4.2) yields
1
yn − ỹn = Δt2n F (yn−1 )Ayn−1 − AF (yn−1 ) + O(Δt3n ),
2
from which we get the first part of the lemma. Moreover, subtraction of (4.3) from
(4.1) with ỹn−1 = yn−1 yields
1
(t − tn−1 )2 (A + F (yn−1 ))(Ayn−1 + F (yn−1 ))
2
1
− Δtn (t − tn−1 ) A2 yn−1 + F (yn−1 ) F (yn−1 ) + 2AF (yn−1 ) + O(Δt3n ),
2
y(t) − ỹ(t) =
and the second estimate in the lemma results from integration over In .
Theorem 4.2 (global analytic operator splitting error). Let y be the solution
of (1.1) and let ỹ be the solution of the analytical operator splitting (2.2) and (2.3).
Then |yN − ỹN | ≈ O(Δt).
Remark 4.1. If we use higher order splitting, analogous analysis yields a higher
order accuracy.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
1125
Proof. Subtraction of (4.3) from (4.1) gives
yn − ỹn = (yn−1 − ỹn−1 ) + Δtn (F (yn−1 ) − F (ỹn−1 ) + A(yn−1 − ỹn−1 )) + O(Δt2n )
≤ C |yn−1 − ỹn−1 | + O(Δt2n ),
where C is a generic constant independent of Δt. Summing,
|yN − ỹN | ≤ C
N
O(Δt2n ) ≤ C Δt.
n=1
Example 4.3. We consider the blow up example in section 2. Assuming a uniform
diffusion time step, induction yields
ỹN =
y0 e−λtN (1 − e−λΔt )
.
(1 − e−λΔt ) − y0 Δt (1 − e−λtN )
Using (2.5), we obtain an estimate of the analytic operator splitting error
1 − e−2tN 2Δt − (1 − e−2Δt )
≤ CΔt.
|yN − ỹN | =
(1 + e2tN ) ((1 − e−2Δt ) − (1 − e−2tN ) Δt)
Table 4.1 shows the error versus the time step.
Table 4.1
Analytic operator splitting errors at T = 2.0 for the blow up example in section 2.
Δt
0.050000
0.025000
0.012500
0.006250
0.003125
Error
0.00185
0.00089
0.00044
0.00021
0.00010
Order
1.102
1.048
1.023
1.011
1.005
4.2. Analysis of the multiscale operator splitting dG finite element
method. We now turn to the analysis of the numerical solution of the multiscale
operator splitting problem (2.3) and (2.2). The unusual feature of this problem is the
numerical solution of an alternating sequence of diffusion and reaction components.
The analysis is carried out using the analogue of the standard local error analysis for
a finite difference scheme. For each component solve on each interval, we decompose
the error as a sum of the error in the initial condition inherited from the previous
component solve and the error of the numerical solution of the component assuming
exact initial conditions on the current interval. We describe the main results below
and give the detailed proof in section 7.
Theorem 4.4 (numerical discretization error). Let ỹ be the solution of analytic
operator splitting and let Ỹ be the multiscale operator splitting dG finite element solution, which approximates ỹ. Assume that there exists a positive constant L such that
|F (u) − F (v)| ≤ L |u − v| for all u, v. Then for qd = 0, 1 and qr = 0, 1,
(4.4)
|ỹN − ỸN | ≈ O(Δtqd +1 ) + O(Δsqr +1 ).
Proof. We set e = ỹ − Ỹ and write
(4.5)
en = ỹn − Ỹn = ynd− − Ynd− = (ynd− − Xn− ) + (Xn− − Ynd− ) = θn− + ζn− ,
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1126
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
where X and θ are defined in Lemma 7.5. Subtracting (3.4) from (7.6) yields
+
+
+
(ζ̇, V ) dt −
(Aζ, V ) dt + (ζn−1
, Vn−1
) = (er−
n , Vn−1 )
In
In
r−
r−
(qd )
. Arguing as in the
for all V ∈ P (qd ) (In ), where er−
n = yn − Yn . Now, ζ ∈ V
proof of Lemma 7.1, we find
|ζn− | ≤ exp(8CA Δtn ) |er−
n |,
where CA = |A|. By Lemma 7.2, this inequality together with (4.5) and Lemma 7.5
give the recursive relation
|en | ≤ C Δtqnd +2 + exp(τn )Δsnqr +1 Δtn + exp(2τn ) |en−1 | ,
where τn = CΔtn . From this recursive inequality, we have
|eN | ≤ C Δtqd +1
N
n=1
exp(2(n − 1)τn )Δtn + C Δsqr +1
N
exp((2n − 1)τn ) Δtn ,
n=1
yielding the desired result.
Combining Theorems 4.2 and 4.4 we have the following global a priori error bound.
Theorem 4.5 (global a priori error bound). Let Ỹ be a multiscale operator
splitting dG finite element solution. Assume that there exists a positive constant L
such that |F (u) − F (v)| ≤ L |u − v| for all u, v. Then for qd = 0, 1 and qr = 0, 1, there
exists constants C1 , C2 , C3 such that
|yN − ỸN | ≤ C1 Δt + C2 Δtqd +1 + C3 Δsqr +1 .
5. An a posteriori–a priori analysis. We now turn to the hybrid a posteriori–
a priori analysis of the multiscale operator splitting dG finite element method. As
mentioned in section 1, the analysis differs from the standard a posteriori analysis
for an evolution problem in several ways. Mainly, we have to account for the fact
that different adjoint operators are associated with the fully coupled problem (1.1)
and the analytic operator split version (2.2)–(2.3). The difference between these
adjoints provides the means to estimate the effects of operator splitting on the stability
properties of a quantity of interest computed from a solution.
5.1. Defining adjoint problems. To define adjoint operators for the forward
problems, we seek analogues of the classic representation formula involving the Green’s
function of a linear elliptic problem. In order to obtain unique adjoint problems from
this condition, we use linearization. We assume that y = 0 is a steady state solution
of (1.1), which can be achieved by assuming that
Homogeneity assumption: F (0) = 0,
and we linearize in a region around 0. In terms of applications to reaction-diffusion
problems, there are mathematical reasons for making the homogeneity assumption
[30], and it is satisfied in a great many cases. We can modify the analysis to allow
for linearization around any other constant steady state solution and more generally
around any known function of time. The selection of a suitable “point” for linearization requires some insight into the behavior of the solution being approximated. We
illustrate below in the bistable example presented in section 6.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1127
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
On time interval (tn−1 , tn ), we consider the linearized problem
ẏ = A y(t) + F (y) y(t), tn−1 < t ≤ tn ,
y(tn−1 ) = yn−1 ,
where F (y) is a matrix whose ijth entry is expressed as
1
∂Fi (sy)
F (y)ij =
ds.
∂yj
0
We note that F (y)y = F (y) because F (0) = 0. The generalized Green’s function ϕ
satisfies the adjoint problem
−ϕ̇ = A ϕ(t) + F (y) ϕ(t), tn > t ≥ tn−1 ,
(5.1)
ϕ(tn ) = ψn ,
where ψn determines the quantity of interest (y(tn ), ψn ), and A and F (y) denote
the transpose of A and F (y), respectively.
Remark 5.1. The analysis extends to cover quantities of interest of the form
T
(y,
ψ) dt in a straightforward way.
0
We choose ψn = ϕ(t+
n ), which couples the local adjoint problems (5.1) to form a
global adjoint problem. This definition yields a simple representation of the solution
value over one time step. Taking the Euclidean inner product of (5.1) with y and
integrating over In gives
−ϕ̇ − A ϕ(t) − F (y) ϕ(t), y dt
0=
In
(5.2)
d
(ϕ, y) dt +
(ẏ − Ay − F (y)y, ϕ)dt.
=−
In dt
In
The second term on the right-hand side vanishes by (1.1), and thus integrating the
first term yields
(5.3)
(yn , ψn ) = (yn−1 , ϕn−1 ).
Using the analogous approach for each component of the analytic operator splitting (2.2) and (2.3), we define the two adjoint problems for n = 1, . . . , N ,
−ϕ˙r = F (y r ) ϕr (t), tn > t ≥ tn−1 ,
(5.4)
r
ϕr (t−
n ) = ψn ,
(5.5)
−ϕ˙d = A ϕd (t),
d
ϕd (t−
n ) = ψn .
tn > t ≥ tn−1 ,
Note that (5.4) is linearized around y r . We obtain the following representations for
the component solutions:
(5.6)
r+
r+
(ynr− , ψnr ) = (yn−1
, ϕr+
n−1 ) = (ỹn−1 , ϕn−1 ),
(5.7)
d+
d+
r−
(ynd− , ψnd ) = (yn−1
, ϕd+
n−1 ) = (yn , ϕn−1 ).
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1128
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
5.2. A local representation of the analytic operator splitting error. As
with the a priori analysis, we begin with the decomposition
y − Ỹ = (y − ỹ) + (ỹ − Ỹ ).
(5.8)
In order to construct a representation of the nodal value yn − ỹn , where ỹn = ynd− , it is
natural to set ψnr = ϕd+
n−1 . Thus, taken together, the adjoint components (5.4)–(5.5)
are analogous to an analytic operator split version of the adjoint problem (5.1), except
that the linearization is taken around y r instead of y. Note that the adjoint component
problems (5.4)–(5.5) are solved “in the reverse order,” which mirrors the fact that the
adjoint of a composition of linear transformations is equal to the composition of the
adjoints of the transformations computed in reverse order.
Now we combine (5.6) and (5.7) to get
(ỹn , ψnd ) = (ynd− , ψnd ) = (ỹn−1 , ϕr+
n−1 ).
(5.9)
To obtain a representation of the local error of operator splitting, we assume that the
adjoint problems (5.1) and (5.5) and (5.4) have the same data ψnd = ψn at time tn .
Using (5.3) and (5.9) we obtain the error representation
(yn − ỹn , ψn ) = (yn−1 , ϕn−1 ) − (ỹn−1 , ϕr+
n−1 ).
(5.10)
At this point, it is convenient to change notation and introduce the solution
operators of the various adjoint problems. Let Φn (y) be the solution operator for the
full adjoint problem (5.1) so Φn (y)ψn = ϕn−1 . For a problem of the form (1.1),
Φn (y) = exp Δtn A +
F (y) dt .
In
Similarly, we set
respectively, so
Φrn (y r )
and
Φdn
to be the solution operators for (5.4) and (5.5),
r+
Φrn (y r )ϕr−
n = ϕn−1
and
Φdn ψnd = ϕd+
n−1 .
For (1.1),
F (y r ) dt
Φrn (y r ) = exp
and
Φdn = exp Δtn A .
In
r
r
d
Under the assumptions above, ϕr+
n−1 = Φn (y )Φn ψn , and (5.10) reads
(yn − ỹn , ψn ) = (yn−1 , Φn (y)ψn ) − (ỹn−1 , Φrn (y r )Φdn ψn ).
To conduct a local analysis, we assume that the forward problems have the correct
data ỹn−1 = yn−1 . Thus, we obtain the following.
Theorem 5.1 (local analytical splitting error). The splitting error over a single
diffusion time step is represented by
(5.11)
(yn − ỹn , ψn ) = (ỹn−1 , ΔΦn ψn ),
with ΔΦn = Φn (y) − Φrn (y r )Φdn .
We note that the first term on the right-hand side of (5.11) includes the effects
associated with the linearization of the nonlinear reaction function around y and y r ,
respectively. The goal now is to use (5.11) to derive a computable estimate.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1129
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
5.3. An error representation for the multiscale operator splitting dG
finite element solution. We now derive the error estimate for the numerical discretization of the analytic operator splitting. Let ϑd define the adjoint solution associated with (3.4) (diffusion component) satisfying
−ϑ˙d = A ϑd (t),
ϑd (t−
n ) = ψn .
tn > t ≥ tn−1 ,
Furthermore, let ϑr define the adjoint solution associated with (3.3) (reaction component) satisfying
−ϑ˙r = (F̂ (y r , Y r )) ϑr (t), sm,n > t ≥ sm−1,n ,
r
ϑr (sm,n ) = ψm,n
r
r
r
r
for m = Mn , . . . , 1, with ψM
= ϑd+
n−1 and ψm,n = ϑm,n for m < Mn . Thus ϑ is
n ,n
continuous across the internal reaction time nodes sm,n , m = 1, . . . , Mn − 1. Here
F̂ (y r , Y r ) is the Jacobian matrix linearized along the trajectory zy r + (1 − z)Y r , with
entries
F̂ij
=
0
1
∂Fi
(zy r + (1 − z)Y r ) dz.
∂yj
We set ed = y d − Y d and er = y r − Y r . Obviously on time interval In ,
(ed , ϑ˙d + A ϑd ) dt = 0 and
In
(y˙d − Ay d , ϑd ) dt = 0.
In
Using integration by parts
d+
d+
(e , ϑ˙d ) dt = (ed−
n , ψn ) − (en−1 , ϑn−1 ) −
d
In
(e˙d , ϑd ) dt,
In
we obtain
(Y˙d − AY d , ϑd ) dt.
d+
d+
(ed−
n , ψn ) = (en−1 , ϑn−1 ) −
In
r−
Furthermore, taking V = Πϑd ∈ V (qd ) in (3.4) and using the fact that ed+
n−1 = eMn ,n −
[Y d ]n−1 yields
d+
(end− , ψn ) = (er−
n , ϑn−1 ) −
d+
(Y˙d − AY d , ϑd − Πϑd ) dt − ([Y d ]n−1 , ϑd+
n−1 − Πϑn−1 ).
In
To get a representation for er−
n , we use similar arguments to obtain
0=
Mn
m=1
r−
(er−
m,n , ϑm,n )
−
r+
(er+
m−1,n , ϑm−1,n )
−
(e˙r
− (F̂ (y , Y ))e , ϑ ) dt .
r
r
r
r
Im,n
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1130
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
Since (F̂ (y r , Y r ))er = F (y r ) − F (Y r ), and y r satisfies (2.2), this reduces to
Mn
0=
r−
(er−
m,n , ϑm,n )
−
r+
(er+
m−1,n , ϑm−1,n )
(Y˙ r − F (Y ), ϑ ) dt .
r
+
r
Im,n
m=1
Taking V = Πϑr ∈ V (qr ) (In ) in (3.3), we then have
0=
Mn
r−
r+
r−
(er−
m,n , ϑm,n ) − (em−1,n , ϑm−1,n ) +
(Y˙ r − F (Y r ), ϑr − Πϑr ) dt
Im,n
m=1
r+
+ ([Y r ]m−1,n , ϑr+
m−1,n − Πϑm−1,n ).
r−
r+
Now since ϑr−
m,n = ϑm,n , e0,n = ỹn−1 − Ỹn−1 , we get
d+
r+
(er−
Mn ,n , ϑn−1 ) = (ỹn−1 − Ỹn−1 , ϑ0,n )
Mn
r+
−
(Y˙ r − f (Y r ), ϑr − Πϑr ) dt + ([Y r ]m−1,n , ϑr+
m−1,n − Πϑm−1,n ) .
m=1
Im,n
Note that end− = ỹn − Ỹn , and thus we can combine all these representations into the
following result.
Theorem 5.2 (local discretization error). The discretization error over a single
diffusion step is represented by
(ỹn − Ỹn , ψn ) = (ỹn−1 − Ỹn−1 , ϑr+
0,n )
M
n
r+
r+
r
r
r
r
−
(Y˙ r − F (Y ), ϑ − Πϑ ) dt + ([Y ]m−1,n , ϑm−1,n − Πϑm−1,n )
(5.12)
m=1
Im,n
−
d+
(Y˙d − AY d , ϑd − Πϑd ) dt − ([Y d ]n−1 , ϑd+
n−1 − Πϑn−1 ).
In
5.4. A computable error representation. In light of (5.12) and (5.11), which
represent the errors over a single diffusion step, and using ỹn−1 = yn−1 , we obtain
the recursive relation
(yn − Ỹn , ψn ) = (yn−1 − Ỹn−1 , ϑr+
0,n ) + (yn−1 , ΔΦn ψn )
Mn
r+
−
(Y˙ r − F (Y r ), ϑr − Πϑr ) dt + ([Y r ]m−1,n , ϑr+
m−1,n − Πϑm−1,n )
(5.13)
m=1
Im,n
−
d+
(Y˙d − AY d , ϑd − Πϑd ) dt − ([Y d ]n−1 , ϑd+
n−1 − Πϑn−1 ).
In
Undoing (5.13) after choosing the adjoint data ψn−1 = ϑr+
0,n for n = 2, . . . , N − 1 and
summing the resulting expressions up to N yields the following result.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
1131
Theorem 5.3. Given an adjoint data ψN , the operator splitting error at the final
time can be represented as
(5.14)
−
(yN − ỸN , ψN ) =
N
(yn−1 , ΔΦn ψn )
n=1
Mn N Y˙ r − F (Y r ), ϑr − Πϑr
r+
dt + [Y r ]m−1,n , ϑr+
m−1,n − Πϑm−1,n
Im,n
n=1 m=1
−
N n=1
d
d+
d+
d
d
d
˙
d
Y − AY , ϑ − Πϑ dt + [Y ]n−1 , ϑn−1 − Πϑn−1
In
= Q̃1 + Q2 + Q3 ,
where ψn−1 = ϑr+
0,n for n = 2, . . . , N − 1.
Q̃1 represents the accumulated effects of operator splitting measured using the
adjoint residual ΔΦn ψn weighted by the solution values yn−1 . Note that if y tends to
zero as time passes, then the accumulated effects of operator splitting decrease correspondingly. On the other hand, if y is increasing, then the effects of operator splitting
also increase. The quantities Q2 and Q3 are typical a posteriori error representations for the dG finite element approximate solutions of the component problems and
are computable up to the linearization of the error equation (which typically does not
cause difficulty [17, 9].) Note that we expect the dG approximations to be much closer
to the analytic operator split solutions, O(Δsqr +1 ) and O(Δtqd +1 ), respectively, than
to the solution of the full problem.
Unfortunately, Q̃1 contains quantities that are not computable, namely, the exact
solution of the fully coupled problem (1.1) and the associated adjoint operator. Even
if we have the true solution, we cannot expect to solve the adjoint of the full problem
since this nominally presents the same difficulties as the original forward problem.
We now decompose Q̃1 into a computable leading order expression and a remainder
that is provably higher order. As a first step,
(5.15)
N N (yN − ỸN , ψN ) =
Ỹn−1 , ΔΦn ψn + Q2 + Q3 +
yn−1 − Ỹn−1 , ΔΦn ψn
n=1
n=1
= Q1 + Q2 + Q3 + Q4 ,
where Q2 and Q3 are the same as for (5.14), and the new expression Q1 does not
depend directly on the solution values. Next, we derive a computable estimate for the
factor ΔΦn ψn in Q1 and then use asymptotic analysis to prove that after substituting
the estimate the remainders from Q1 as well as from Q4 are higher order.
Example 5.4. To motivate (5.15) as a natural representation, we consider the blow
up example in section 2 once again. Since there is no numerical solution involved, the
expressions Q2 and Q3 drop out. The adjoint associated with the blow up problem is
ϕ(t) = Φn (t) ψn ,
tn > t ≥ tn−1 ,
Φn (t) =
yn−1 − (yn−1 − λ)eλ(t−tn−1 )
.
yn−1 − (yn−1 − λ)eλΔtn
Since the diffusion component is linear, the associated adjoint is readily seen to be
ϕd (t) = Φdn (t) ψnd ,
tn > t ≥ tn−1 ,
Φdn (t) = eλ(t−tn ) .
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1132
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
For the reaction component, the associated adjoint is
ϕ(t) = Φrn (t) ψn ,
tn > t ≥ tn−1 ,
Φrn (t) =
d−
1 − yn−1
(t − tn−1 )
d−
1 − yn−1
Δtn
for t ∈ In . At the final time level tN , (5.15) reads
yN − ỹN =
N
d−
yn−1
ΔΦn (tn−1 ) ψn +
n=1
N
d−
yn−1 − yn−1
ΔΦn (tn−1 )ψn ,
n=1
where ψN = 1 and ψn = Φrn+1 (tn ) Φdn+1 (tn ) ψn+1 for 1 ≤ n < N .
Table 5.1 illustrates the performance of the a posteriori error representation. We
use λ = 0.9 and initial condition y0 = 1. The column with title “order” shows the
computed order of convergence of Q4 to zero.
Table 5.1
Operator splitting estimated errors at T = 2.0 for blow up example in section 2.
Δt
1/80
1/160
1/320
1/640
1/1280
Exact
−0.176863
−0.085044
−0.041723
−0.020667
−0.010285
Q1
−0.183464
−0.086602
−0.042101
−0.020760
−0.010309
Q4
0.006600
0.001557
0.000378
0.000093
0.000023
Order
2.176
2.083
2.040
2.020
2.010
This example suggests that
ΔΦn = Φn (y) − Φrn (y r )Φdn ≈ O(Δt2n ).
(5.16)
If this is true, then Q4 is O(Δtqd +2 ) and can be ignored in the asymptotic limit when
computing an estimate.
It helps to decompose (5.16) into two separate quantities,
Φn (y) − Φrn (y r )Φdn = Φn (y) − Φrn (y)Φdn + (Φrn (y) − Φrn (y r )) Φdn = E1 + E2 .
E1 measures the splitting error around the true solution, while E2 measures the effect
of switching the linearization from around the true solution y to around y r in the
nonlinear reaction.
We next derive an asymptotic representation for E1 .
Lemma 5.5. E1 = E 1 + O(Δt3n ), with
1
and R(y) =
E 1 = Δtn A R(ỹ) − R(ỹ) A
F (y) dt.
2
In
Proof. Using the expansion exp(B) =
be expressed as
(5.17)
E1 =
∞
1 i
i=0 i! B
for a square matrix B, E1 can
1
Δtn A R(y) − R(y) Δtn A + O(Δt3n ).
2
E1 can be approximated by the first term in (5.17) up to O(Δt3n ). For practical
reasons, the dependence on y has to be avoided. A natural candidate to replace y is
the operator splitting solution ỹ, which is approximated to high order by the operator
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1133
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
splitting dG finite element method. By adding and subtracting appropriate terms,
we write
(5.18)
1
1
1
E1 ≈ Δtn A R(ỹ) − R(ỹ) A + Δtn A (R(y) − R(ỹ)) + Δtn (R(ỹ) − R(y)) A .
2
2
2
It is obvious that the first term is computable. The task is to demonstrate that the
remaining terms in (5.18) are higher order. Specifically, we show that
(5.19)
Ỹn−1 , A (R(y) − R(ỹ)) ψn ≈ O(Δt2n )
and
(5.20)
Ỹn−1 , (R(ỹ) − R(y)) A ψn ≈ O(Δt2n ).
For (5.19), we may write
Ỹn−1 , A (R(y) − R(ỹ))ψn = AỸn−1 , (R(y) − R(ỹ))ψn
≤ |A|l∞ |Ỹn−1 |l∞ |R(y) − R(ỹ)|l1 |ψn |l1 ,
where we have used the usual vector norms and the corresponding subordinate matrix
norms. In particular, since R(y) involves the matrix transpose,
l |R(y) − R(ỹ)|l1 = max
1≤i≤l
j=1
(F ij (y)
−
In
F
ij (ỹ)) dt ≤ C
|y − ỹ| dt,
In
where we have used the Lipschitz continuity of F ij . By Lemma 4.1 this yields (5.19).
Similar arguments hold for (5.20) and the proof is complete.
Next, we seek an approximate estimate for E2 that does not depend on the unknown solution y.
∂ 2 Fi
i
Lemma 5.6. Assume that ∂F
∂yj and ∂yj ∂yk are Lipschitz continuous. Then E2 =
E 2 + O(Δt3n ), with E 2 = (Φrn (ỹ) − Φrn (y r )) Φdn .
Proof. We write
E2 = (Φrn (ỹ) − Φrn (y r )) Φdn + (Φrn (y) − Φrn (ỹ)) Φdn .
We want to show that
(Φrn (y) − Φrn (ỹ)) Φdn ≈ O(Δt3n ).
This requires estimating the difference between the solution operators of the reaction component adjoints corresponding to linearization around y and ỹ. The solution
operator Φrn (y) is associated with the problem
−ω̇ = F (y) ω(t), tn > t ≥ tn−1 ,
(5.21)
ω(tn ) = Φdn ψn ,
while the solution operator Φrn (ỹ) is associated with
−ω̃˙ = F (ỹ) ω̃(t), tn > t ≥ tn−1 ,
(5.22)
ω̃(tn ) = Φdn ψn .
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1134
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
We expect that if ỹ closely approximates y, then the solutions of these differential
equations are close as well. In fact, Lemma 4.1 implies that |yn − ỹn | ≈ O(Δt2n ) for
ỹn−1 = yn−1 .
Using a Taylor expansion, we write
dω(tn ) 1 2 d2 ω(tn )
+ Δtn
+ O(Δt3n )
dt
2
dt2
2
1 2 dF (yn )
I + Δtn F (yn ) − Δtn
+ [F (yn ) ]
Φdn ψn + O(Δt3n ).
2
dt
ω(tn−1 ) = ω(tn ) − Δtn
=
Similarly,
ω̃(tn−1 ) =
I+
Δtn F (y˜n )
1
− Δt2n
2
dF (y˜n )
dt
+
[F (y˜n ) ]2
Φdn ψn + O(Δt3n ).
In these two expansions, we have applied the initial condition ω(tn ) = ω̃(tn ) = Φdn ψn .
Taking the difference between the expansions,
(5.23) ω(tn−1 ) − ω̃(tn−1 )
d 1
= Δtn (F (yn ) − F (ỹn ) ) + Δt2n
F (ỹn ) − F (yn )
2
dt
2
2
1
+ Δt2n
Φdn ψn + O(Δt3n ).
F (y˜n )
− F (yn )
2
Now, we show that F (yn ) − F (ỹn ) is O(Δt2n ), and that ([F (y˜n ) ]2 − [F (yn ) ]2 )
and d/dt(F (ỹn ) − F (yn ) ) are at least O(Δtn ). In elemental form, we may write
F (yn )ij − F (ỹn )ij =
1
0
∂Fi (syn ) ∂Fi (sỹn )
−
∂yj
∂yj
ds ≤ C|yn − ỹn | ≈ O(Δt2n ),
where we have used the assumption that ∂Fi (y)/∂yj is Lipschitz continuous. Moreover, we may write
[F (y˜n ) ]2 − [F (yn )]2
=
F (y˜n ) − F (yn )
F (y˜n )
+ F (yn ) F (y˜n ) − F (yn ) .
Arguing as above shows this term is O(Δt2n ), and thus the contribution of the third
term in (5.23) is O(Δt4n ). The same conclusion about the second term in (5.23) follows
2
Fi
using the assumption that ∂y∂j ∂y
is Lipschitz continuous. This finally leads to the
k
conclusion that ω(tn−1 ) − ω̃(tn−1 ) = O(Δt3n ).
Finally, Lemmas 5.5 and 5.6 involve ỹ and y r , which we do not have in practice.
We use the same kinds of arguments to replace them by the approximations Ỹ and Y r
at the cost of further higher order expressions. The result is contained in Theorem 5.7.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
1135
Theorem 5.7 (computable a posteriori error estimate). A computable error
representation for the multiscale operator splitting dG finite element method is
(yN − ỸN , ψN ) =
−
Mn
N N n=1
(Ỹn−1 , (E 1 + E 2 )ψn )
n=1
r+
r+
r
r
r
r
r
˙
(Y − F (Y ), ϑ − Πϑ ) dt + ([Y ]m−1,n , ϑm−1,n − Πϑm−1,n )
Im,n
n=1 m=1
−
N
d+
d+
d
d
d
d
˙
d
(Y − AY , ϑ − Πϑ ) dt + ([Y ]n−1 , ϑn−1 − Πϑn−1 )
In
+ O(Δtqd +2 ) + O(Δt Δsqr +1 ),
where
E1 =
1
Δtn A R(Ỹ ) − R(Ỹ ) A
2
and E 2 = Φrn (Ỹ ) − Φrn (Y r ) Φdn .
We have finally obtained the hybrid a posteriori–a priori error estimate, where the
leading order expressions are computable and the remainder is provably higher order.
Recall that the term E 1 is a matrix that consists of the diffusion matrix A and the
Jacobian of the nonlinear reaction, R(Ỹ ) = In F (Ỹ )dt. These are computable and
do not require the solution of an adjoint problem. On the other hand, the term E2
involves the computation of three adjoint solutions, namely, one adjoint solution of the
diffusion component and the adjoint solutions of the reaction components linearized
about Ỹ and Y r , respectively.
5.5. Remark on the definition of the adjoint problem. The homogeneity
assumption F (y) = 0 implies that y = 0 is a steady state solution of (1.1). We can
also define adjoint problems using other steady state solutions or a given function of
time. We illustrate by assuming that c is a vector such that
General homogeneity assumption:
F (c) = 0.
We define the variable z = y − c and set
1
F (z) =
F (sz + c) ds,
0
so that F (z)z = F (y) − F (c) = F (y). We can define a differential equation governing
z,
(5.24)
ż = A z(t) + F (y) + Ac = A z(t) + F (z) z(t) + Ac.
The associated generalized Green’s function ϕ satisfies the adjoint differential equation
(5.25)
−ϕ̇ = A ϕ(t) + F (z) ϕ(t).
Arguing as in section 5.1 yields
0=
−ϕ̇ − A ϕ(t) − (f (z)) ϕ(t), z dt
In
(5.26)
d
(ż − Az − F (z)z − Ac, ϕ)dt +
(Ac, ϕ)dt.
=−
(ϕ, z) dt +
In dt
In
In
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1136
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
The second term on the right-hand side vanishes by (5.24), and thus integrating the
first term yields
(Ac, ϕ)dt.
(5.27)
(zn , ψn ) = (zn−1 , ϕn−1 ) +
In
Using the analogous approach for each component of the analytic operator splitting (2.2) and (2.3), we define, respectively, z r = y r − c and z d = y d − c, and the
associated differential equations
z˙r = F (y r ) = F (z r )z r ,
z˙d = Az d + Ac.
To these differential equations, we define the respective adjoint problems
−ϕ˙r = F (z r ) ϕr (t),
−ϕ˙d = A ϕd (t).
Again, arguing as in section 5.1, we obtain the following representations for the component solutions:
r+
(znr− , ψnr ) = (zn−1
, ϕr+
),
n−1
d+
(znd− , ψnd ) = (zn−1
Ac, ϕd dt.
, ϕd+
n−1 ) +
In
Next we can follow the analysis in section 5.2 to get an error representation analogous
to Theorem 5.1.
Theorem 5.8. Let c be a vector such that F (c) = 0. Then the splitting error
over a single diffusion time step can be represented by
Ac, ϕ − ϕd dt
(yn − ỹn , ψn ) = (ỹn−1 − c, ΔΦn ψn ) +
In
with ΔΦn = Φn (y) − Φrn (y r )Φdn .
We note that when c = 0, the original error representation in Theorem 5.1 is
recovered. Also, we showed above that the first term involving ΔΦn ψn can be cast
into expressions that are computable. Similar analysis can be carried out for the last
term involving ϕ − ϕd . To see this, we write
(5.28)
ϕ − ϕd = (ϕ − ω) + (ω − ω̃) + (ω̃ − ϕd ),
where ω and ω̃ are the functions governed by differential equations (5.21) and (5.22).
Using the expansion of ϕ and ω gives
ϕ(t) − ω(t) = (tn − t) A ψn − Δtn A ψn + O (tn − t)2 + Δt2n
(5.29)
= (tn−1 − t) A ψn + O (tn − t)2 + Δt2n ,
from which we obtain
1
(5.30)
(Ac, ϕ − ω) dt = − Δt2n Ac, A ψn + O(Δt3n ).
2
In
Using a similar argument to that in the proof of Lemma 5.6, we can deduce that
(Ac, ω − ω̃) dt = O(Δt3n ).
(5.31)
In
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
1137
Finally, the function ω̃ is actually computed in the error estimator and thus we may
write
1
Ac, ϕ − ϕd dt = − Δt2n Ac, A ψn +
Ac, ω̃ − ϕd dt + O(Δt3n ).
(5.32)
2
In
In
We note that in this setting, the rest of the error estimator components remains as
before.
6. Numerical examples. In this section, we present several numerical examples
that show the performance of the error estimates. All of these problems originate as
reaction-diffusion initial boundary value problems. Unless otherwise noted, we use
a continuous, piecewise linear Galerkin finite element method with Ne elements to
discretize space. All forward problems are solved using the lowest order, piecewise
constant dG method, which is equivalent to backward Euler scheme, while the adjoint
solutions are computed using a second order, piecewise linear, cG method, which is
equivalent to the Crank–Nicolson scheme.
6.1. Assessment of the operator splitting exact error. To gain some insights into the splitting procedure, we solve a nonlinear initial boundary value problem
described in (1.2) with the following specification:
f (x, u) =
u2
,
sin(πx)
ud = 0,
u0 (x) = sin(πx).
After spatial discretization, the vector of initial conditions g has entries gj = sin(πxj )
= sin(jπ/Ne ), while using the trapezoidal rule to approximate the integrals involving
the forcing terms gives
yi2
1
yi2
yi2
1
(6.1)
Fi (y) ≈
0+
+
+0 =
.
2
sin(πxi )
2 sin(πxi )
sin(πxi )
The eigenvalues of the matrix A are
(6.2)
λi =
2k 2k
− 2 cos(iπ/Ne ),
h2
h
with the associated eigenvectors Vi whose entries are
(6.3)
Vij = sin(ijπ/Ne ).
We note that g = V1 and assume that the exact solution of (1.1) has entries
(6.4)
y(t) = ξ(t)V1 ,
where ξ(t) is a scalar function to be determined later and V1 is the eigenvector of
matrix D associated with the eigenvalue λ1 . Consequently, we have
(6.5)
Fi (y) = Fi (ξV1 ) =
(ξV1i )2
= ξ 2 V1i ,
sin(πxi )
using the fact that V1i = sin(iπ/Ne ) = sin(πxi ). Substitution of (6.5) and (6.4) into
(1.1) yields the ordinary differential equation (noting that AV1 = λ1 V1 )
˙ + λ1 ξ(t) = ξ 2 (t),
ξ(t)
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1138
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
0
0
N=20, M=100
N=40, M=50
N=80, M=25
-1
-1.5
-2
M=25
M=50
M=100
M=200
-0.5
Exact Error
Exact Error
-0.5
-1
-1.5
0
0.2
0.4
0.6
Component
0.8
-2
1
0
.2 0
0.4
0.6
Component
0.8
1
Fig. 6.1. Comparison of exact errors at T = 2 against spatial location: reaction time step is
kept constant (left), diffusion time step is kept constant (right).
with ξi (0) = 1. This has the analytical solution
ξ(t) =
λ1
.
1 − (1 − λ1 )eλ1 t
Figure 6.1 shows exact errors of the splitting procedure for this problem. The plot
on the left shows the exact error at T = 2 plotted against the spatial location while
the reaction time step is kept constant. This demonstrates that the error behaves like
O(Δt). The plot on the right shows the exact error at T = 2 while the diffusion time
step is kept constant. As the reaction time step is decreased, the error also decreases
until it reaches a condition where the dominating error comes from the diffusion time
step. After this, there is no improvement in accuracy. This result confirms the a priori
analysis established in the previous section that the error in the operator splitting is
dominated by the component that is of O(Δt).
6.2. Performance of the a posteriori error representation. The main purpose of the next four examples is to test the accuracy of the computable parts of the
hybrid a posteriori–a priori error estimate where we drop the uncomputable higher
order terms. Since we do not have true solutions for most of these problems, we
approximate exact errors by computing the difference between the operator splitting
solution with numerical solution of the fully coupled problems computed on a very
fine mesh. We refer to this approximated error as the “error.”
The first three examples fall into the category of stable diffusion interacting with
unstable reaction. The reaction components in the three examples present a range of
instability. The last example is radically different in that it represents competition
between stable reaction and diffusion components.
6.2.1. A blow up problem. The first example is the “blow up” problem obtained from
⎧
∂u
∂2u
2
⎪
⎪
⎪ ∂t − 0.05 ∂x2 = u , x ∈ (0, 1), t > 0,
⎪
⎨
⎪u(0, t) = u(1, t) = 0,
⎪
⎪
⎪
⎩
u(x, 0) = 4x(1 − x),
t > 0,
x ∈ (0, 1).
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1139
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
Table 6.1
Operator splitting error estimate for the blow up problem at T = 1, reaction time step = 10−3 .
M
100
10
1
Exact error (%)
11.07
1.35
0.45
Effectivity
1.0286
1.0067
1.0020
0
0
Error and Estimate
Error, Estimate, and Contributions
Δt
10−1
10−2
10−3
-0.05
-0.1
Estimate
O/S First Component
O/S Second Component
Diffusion component
Reaction component
-0.15
-0.2
-0.25
0
0.2
0.4
0.6
Component
0.8
-0.2
-0.4
-0.6
-0.8
1
0
1
0.5
1.5
Time
Fig. 6.2. Blow up results: Comparison of errors against the spatial location (left), time history
of errors at the midpoint location (right). The dotted line is the exact error and the + is the
estimated error.
As mentioned in section 2, the solution of the reaction component exhibits finite
time blow up when undamped by the diffusion component. This is perhaps the most
extreme form of instability. For this computation, we use 20 spatial finite elements.
Table 6.1 shows the effectivity index of the error estimate computed at the final time
T = 1. In this computation, we keep the reaction time step constant and varied the
diffusion time step and number of reaction time steps.
Figure 6.2 shows a comparison of the errors computed using Δt = 0.05 and
M = 50 reaction time steps. The left plot in Figure 6.2 compares the errors at T = 1
plotted against the spatial location. In this plot, we plot each of the expressions
contributing to the overall estimate. In the plot on the right, the time history up to
T = 1.3 of the error at the midpoint location is shown.
6.2.2. Chemical dynamics: The Brusselator problem. The Brusselator
problem is represented by a coupled set of equations first introduced by Prigogine
and Lefever [26] as a model of chemical dynamics:
⎧
∂u1
∂ 2 u1
⎪
⎪
⎪
−
k
= α − (β + 1)u1 + u21 u2 ,
x ∈ (0, 1), t > 0,
1
⎪ ∂t
2
⎪
∂x
⎪
⎪
⎪
⎪
⎨ ∂u2
∂ 2 u2
− k2
= βu1 − u21 u2 ,
x ∈ (0, 1), t > 0,
(6.6)
2
∂t
∂x
⎪
⎪
⎪
⎪
u1 (0, t) = u1 (1, t) = α, u2 (0, t) = u2 (1, t) = β/α, t > 0,
⎪
⎪
⎪
⎪
⎪
⎩u (x, 0) = u (x), u (x, 0) = u (x),
x ∈ (0, 1),
1
1,0
2
2,0
where u1 and u2 are the concentration of species 1 and 2, respectively. We use α = 2,
β = 5.45, k1 = 0.008, k2 = 0.004 and initial conditions u1 (x, 0) = α + 0.1 sin(πx)
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1140
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
.002
.001
0
-.001
.03
.001
Error and Estimate
Species 1
Error and Estimate
Error and Estimate
.002
Species 1
0
Species 2
-.001
Species 1
.01
0
-.02
Species 2
-.002
0
0.2 0.4 0.6 0.8
Component
1
-.002
0
Species 2
0.5
1
1.5
Time
2
-.04
0
0.2 0.4 0.6 0.8
Component
1
Fig. 6.3. Brusselator results. Left: comparison of errors against the spatial location at T = 2.
Middle: time history of errors at the midpoint location on [0, 2]. Right: comparison of errors against
the spatial location at T = 40. The dotted line is the exact error and the + is the estimated error.
and u2 (x, 0) = β/α + 0.1 sin(πx), which yields an oscillatory solution. In this case,
the reaction is very mildly unstable, with at most a polynomial rate accumulation of
perturbations as time passes. We use a 32 node spatial finite element discretization,
resulting in an ordinary differential equation system with dimension 62. We note that
in original form, the reaction terms do not satisfy the requirement F (0) = 0. Instead,
we use a vector c as discussed in section 5.5 with ci = α for i = 1, . . . , Ne − 1 and
ci = β/α for i = Ne , . . . , 2Ne − 2, so that F (c) = 0.
Figure 6.3 compares the errors computed using Δt = 0.01 and M = 10 reaction
time steps to the hybrid a posteriori error estimates. We show results for [0, 2] when
the solution is still in a transient stage, and at T = 40 when the solution has become
periodic. All the results show that the exact and estimated errors are in remarkable
agreement.
6.2.3. Chaotic dynamics: The Lorenz problem. In this example, we treat
the chaotic Lorenz equations as a reaction component of a reaction-diffusion problem:
(6.7)
⎧
∂u1
∂ 2 u1
⎪
⎪
− 0.5
= 10(u2 − u1 ),
⎪
⎪
∂t
∂x2
⎪
⎪
⎪
⎪
⎪
⎪
∂ 2 u2
∂u2
⎪
⎪
− 0.5
= u1 (28 − u3 ) − u2 ,
⎪
⎪
∂x2
⎨ ∂t
∂ 2 u3
∂u3
8
⎪
⎪
−
0.5
= u1 u2 − u3 ,
⎪
2
⎪
∂t
∂x
3
⎪
⎪
⎪
⎪
⎪
⎪
ui (0, t) = ui (1, t) = 0,
⎪
⎪
⎪
⎪
⎩
ui (x, 0) = .1 sin(πx),
x ∈ (0, 1), t > 0,
x ∈ (0, 1), t > 0,
x ∈ (0, 1), t > 0,
t > 0, i = 1, 2, 3,
x ∈ (0, 1), i = 1, 2, 3.
The chaotic nature of the Lorenz equations implies that errors accumulate locally
at an exponential rate in an average sense, placing this instability between that of
the blow up and the Brusselator problems. Here, we use 20 spatial finite elements,
resulting in a system of ordinary differential equations with dimension 57. Figure 6.4
shows typical error estimates for the three species. Across the top row, we compare
estimates and errors at the final time T = 2 using Δt = 5 × 10−3 and M = 10 reaction
time steps. We show the time history at the midpoint across the bottom row. Again
the figures show good agreement between exact and estimated errors.
We illustrate the accuracy at a longer time of T = 16 in Figure 6.5.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1141
0.4
0.15
0.1
0.05
0
0.2
0.1
Error and Estimate
0.4
0.2
0
-0.2
Species 1
-0.4
0
0.5
1 1.5
Time
1
0.5
0
-0.5
0
2
0.1
0.05
0
0.5
0 0.2 0.4 0.6 0.8 1
Component
1
Species 2
1.5
Species 3
0.15
0 0.2 0.4 0.6 0.8 1
Component
2
0.6
Error and Estimate
0.3
0
0 0.2 0.4 0.6 0.8 1
Component
0.2
Species 2
Error and Estimate
Species 1
Error and Estimate
0.2
Error and Estimate
Error and Estimate
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
1 1.5
Time
0.5
0
-0.5
-1
-1.5
-2
2
Species 3
0
0.5
1 1.5
Time
2
Error and Estimate
Fig. 6.4. Lorenz results. Top row: comparison of errors against the spatial location. Bottom
row: time history of errors at the midpoint location. The dotted line is the exact error and the + is
the estimated error.
0.2
0.25
0.1
0.125
0.2
0.1
Species 2
Species 1
0
0
.5
1
0
.5
0
Species 3
0
1
0
.5
1
Component
Fig. 6.5. Accuracy of the error estimate for the Lorenz problem at time T = 16. The dotted
line is the exact error and the + is the estimated error.
6.2.4. The bistable problem. The bistable problem,
⎧
∂u
∂2u
⎪
⎪
− 2 = u − u3 ,
⎪
⎪
∂x
⎨ ∂t
(6.8)
x ∈ (0, 1), t > 0,
⎪ux (0, t) = ux (1, t) = 0, t > 0,
⎪
⎪
⎪
⎩
x ∈ (0, 1),
u(x, 0) = u0 (x),
is a well-studied example of nonlinear relaxation to equilibrium in the presence of
competing stable steady states [3, 19, 1, 12, 17]. The stable steady states are u = 1
and u = −1, while u = 0 is an unstable steady state. Here, both the diffusion and the
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1142
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
0
Error Estimate
Error and Estimate
0
-0.005
-0.01
“error”
“error”
adjoint using 0
adjoint using 1
-0.005
-0.01
adjoint using 0
adjoint using 1
-0.015
0
0.2
0.4 0.6
Component
0.8
1
-0.015
0.2
0.25 0.3 0.35
Component
0.4
Fig. 6.6. Bistable problem error estimate at T = 41; the right plot is the zoomed view of the
boxed portion on the left plot.
reaction are stabilizing, while instability arises because of the competition between
these two components. Nonequilibrium solutions are characterized by long periods of
“metastability” during which the solution is nearly stationary over periods of time on
the order of exp(1/) that are punctuated by rapid transients. The spatial profile of a
metastable solution consists of narrow layers between regions where the solution has
values of 1 and −1. We emphasize that the interaction between reaction and diffusion
is very delicate in a metastable solution, and it is by no means clear that operator
splitting is a reasonable approach.
For the computation we use 100 spatial finite elements. We compute the solution
until final time level T = 41. Figure 6.6 shows comparison of the error. Here, we
use c = 0 and c = 1 as the linearization points. The figure shows an observable
improvement when computing the error using c = 1 than when using c = 0. Note
that the solution eventually converges to 1.
7. Details of the a priori analysis. The following section contains the sequence of lemmas required for the proof of Theorem 4.4.
Lemma 7.1 determines the error in the numerical solution of the reaction component arising from errors in the initial conditions.
Lemma 7.1. Let Z ∈ V (qr ) (In ) satisfy
+
+
−
+
(7.1)
(Ż, W ) dt −
(F (Z), W ) dt + (Zm−1,n
, Wm−1
) = (Zm−1,n
, Wm−1
)
Im,n
Im,n
−
r+
for all W ∈ P (qr ) (Im,n ), m = 1, 2, . . . , Mn , and Z0,n
= yn−1
. With ξ = Z − Y r ,
−
|ξM
|2 ≤ exp(16LΔtn ) |ỹn−1 − Ỹn−1 |2 .
n ,n
Proof. By construction, ξ ∈ V (qr ) (In ). It is obvious that for qr = 0, 1,
2
−
˙2 .
(7.2)
|ξ|2 dt ≤ 2Δsn |ξm,n
|2 + Δs3n |ξ|
Im,n
3
Im,n
Subtracting (3.3) from (7.1) yields
(7.3)
˙ W ) dt −
(ξ,
Im,n
+
+
−
+
(F (Z) − F (Y r ), W ) dt + (ξm−1,n
, Wm−1
) = (ξm−1,n
, Wm−1
)
Im,n
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
1143
for every W ∈ P (qr ) (Im,n ). Setting W = (t − sm−1,n )ξ˙ in (7.3) and estimating yields
2 2
1 2 ˙2
Δsn |ξ|Im,n ≤
L Δsn
2
2
|ξ|2 dt +
Im,n
1
˙2
Δs2n |ξ|
Im,n
22
for some > 0. Thus,
2
˙2
Δs2n |ξ|
Im,n ≤ C L Δsn
(7.4)
|ξ|2 dt,
Im,n
where C = 4 /(2 − 1). Substitution of (7.4) into (7.2) gives
2
−
1 − C Δs2n L2
|ξ|2 dt ≤ 2Δsn |ξm,n
|2 ,
3
Im,n
from which we obtain
−
|ξ|2 dt ≤ 4Δsn |ξm,n
|2 ,
(7.5)
Im,n
provided 1 − 23 C Δs2n L2 > 1/2. Next, we choose W = ξ in (7.3) and use the Lipschitz
continuity of F to get
1 − 2 1 +
−
+
|ξm,n | + |ξm−1,n |2 ≤ L
|ξ|2 dt + |ξm−1,n
| |ξm−1,n
|.
2
2
Im,n
This gives
−
|ξm,n
|2
≤
−
|ξm−1,n
|2
|ξ|2 dt.
+ 2L
Im,n
Using (7.5), this implies
−
|2 ≤
|ξm,n
1
−
|ξ −
|2 ≤ exp(16Δsn L) |ξm−1,n
|2 ,
1 − 8Δsn L m−1,n
provided 1 − 8Δsn L > 1/2. Applying this recursive relation Mn times yields the
desired result.
Lemma 7.2 determines the error in the numerical solution of the reaction component due to discretization and the inherited initial conditions.
Lemma 7.2. Let y r be the solution of analytical reaction component and let Y r
be the dG numerical solution approximating y r . For n = 1, . . . , N ,
r−
|ynr− − YM,n
| ≤ C Δtn Δsnqr +1 + exp(8LΔtn ) |ỹn−1 − Ỹn−1 |.
Proof. We write
r−
−
−
r−
ynr− − YM,n
= (ynr− − ZM,n
) + (ZM,n
− YM,n
),
where Z ∈ V (qr ) (In ) is defined as in Lemma 7.1. Moreover, it has been established
(cf. Delfour and Dubean [6], Johnson [22], and Estep [13]) that
−
|ynr− − ZM,n
| ≤ C Δtn Δsnqr +1 .
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1144
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
Using Lemma 7.1, the proof is complete.
We also use the following result from Delfour, Hager, and Trochu [7].
Lemma 7.3. Let w ∈ H 1 (In ) satisfying ẇ + A w = 0 in In . Then there exists
a constant C independent of s ∈ In , such that wr+1,n ≤ C|w(s)|, where the norm
· r,n is associated with the Sobolev space
r i 2
d
w
<∞ .
H r (In ) = w : w2r,n =
dti 2
i=0
L (In )
Lemma 7.4 bounds the residual to a linear constant coefficient differential equation
when its exact solution is projected into a piecewise polynomial space.
Lemma 7.4. Let Π : L2 (In ) → P (q) (In ) denote an interpolation operator. Let
w be as defined in Lemma 7.3, and Πw ∈ P q (In ), q ≥ 1, its interpolation function.
Then there is a positive constant C such that for all s ∈ In ,
d
Πw + A Πw
≤ C Δtqn |w(s)|.
dt
2
L (In )
Proof. Since w in Lemma 7.3 is homogeneous, the interpolation property (cf.
Strang and Fix [33] and Ciarlet [4]) and Lemma 7.3 imply that for tn−1 ≤ s ≤ tn ,
d
Πw + A Πw = d (Πw − w) + A (Πw − w)
dt
dt
≤ C w − Πw1,n ≤ C Δtqn wq+1,n ≤ C Δtqn |w(s)|.
Lemma 7.5 bounds the error in the numerical solution to a constant coefficient
differential equation.
Lemma 7.5. Let X ∈ P qd (In ) satisfy
+
+
+
(Ẋ, V ) dt −
(AX, V ) dt + (Xn−1
, Vn−1
) = (ynr− , Vn−1
)
(7.6)
In
In
−
d
−
qd +2
= yr −
for
for all V ∈ P qd (In ), where Xn−1
n . With θ = y − X, |θn | ≤ C Δtn
qd = 0, 1.
Proof. Obviously y d defined in (2.3) satisfies (7.6). Let U ∈ P qd (In ) satisfy
(7.7)
(U̇ , V ) dt −
In
+
+
+
(Ay d , V ) dt + (Un−1
, Vn−1
) = (ynr− , Vn−1
) for all V ∈ P qd (In ).
In
For sufficiently small Δtn , the following estimate holds (see [13]):
(7.8) |θ|In ≤ |y d − U |In + |U − X|In ≤ CΔtqnd +1 |y (qd +1) |In + CΔtqnd +3/2 |y (qd +1) |In .
Subtracting (7.6) from the variational formulation of y d gives
+
+
(θ̇, V ) dt −
(Aθ, V ) dt + (θn−1
, Vn−1
) = 0.
(7.9)
In
In
Integration by parts gives
(7.10)
(θn− , Vn− )
=
(θ, V̇ + A V ) dt.
In
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
A POSTERIORI ANALYSIS OF OPERATOR SPLITTING
1145
For qd = 0, we choose V = Vn− = θn− in (7.9) and use (7.8) to get |θn− | ≤ CΔt2n . For
qd = 1, we choose V = Πw in (7.9), with w defined as in Lemma 7.3, and w(tn ) = θn− .
Then using (7.8) and Lemma 7.4,
(7.11)
|θn− |2 ≤
˙ + A Πw| dt ≤ CΔt3
|θ| |Πw
n
Δtn |θn− |,
In
which gives the desired estimate.
8. Conclusion. In this paper, we derive both an a priori convergence estimate
and a hybrid a posteriori–a priori estimate for the multiscale operator splitting discontinuous Galerkin finite element method for a system of ordinary differential equations.
The system of equations is assumed to have a form that typically arises from space
discretization of a reaction-diffusion problem. The a priori analysis uses the fact that
an operator splitting approximation is a consistent approximation of an analytic operator splitting problem. The a posteriori analysis takes into account the fact that the
original problem and an analytic operator split version are associated with different
adjoint problems. The differences in the adjoints provides the means to accurately
understand the effects of operator splitting on the stability properties of a quantity of
interest computed from the solution. To produce a computable a posteriori estimate
of the error, we manipulate the original a posteriori error representation to obtain
a computable expression plus uncomputable quantities that are provably higher order in an asymptotic sense. We conclude with some examples that demonstrate the
accuracy of the computable parts of the hybrid a posteriori–a priori estimate.
Our results can be extended in a straightforward way to differential equations
with a more general nonlinear form, higher order splitting schemes, and different
time finite element methods. The results also extend formally, and rigorously for the
most part, to operator splitting finite element schemes for reaction-diffusion problems
where the splitting occurs at the partial differential equation level. We will pursue
the complete extension to the latter in future work.
The general approach to analyzing operator splitting can be used to analyze
operator decomposition in a wide variety of settings; see, e.g., [2, 18].
REFERENCES
[1] L. Bronsard and R. Kohn, On the slowness of phase-boundary motion in one space dimension, Comm. Pure Appl. Math., 43 (1990), pp. 983–997.
[2] V. Carey, D. Estep, and S. Tavener, A posteriori analysis and adaptive error control for
multiscale operator decomposition solution of elliptic systems I: Triangular systems, SIAM
J. Numer. Anal., submitted (2006).
[3] J. Carr and R. Pego, Metastable patterns in ut = 2 Δu − f (u), Comm. Pure Appl. Math.,
42 (1989), pp. 523–576.
[4] P. G. Ciarlet, The Finite Element Method for Elliptic Problems, Stud. Math. Appl. 4, North–
Holland, Amsterdam, 1978.
[5] C. N. Dawson and M. F. Wheeler, Time-splitting methods for advection-diffusion-reaction
equations arising in contaminant transport, in ICIAM 91 (Washington, DC, 1991), SIAM,
Philadelphia, 1992, pp. 71–82.
[6] M. C. Delfour and F. Dubeau, Discontinuous polynomial approximations in the theory of
one-step, hybrid and multistep methods for nonlinear ordinary differential equations, Math.
Comp., 47 (1986), pp. 169–189; supplement, pp. S1–S8.
[7] M. Delfour, W. Hager, and F. Trochu, Discontinuous Galerkin methods for ordinary differential equations, Math. Comp., 36 (1981), pp. 455–473.
[8] S. Descombes, Convergence of a splitting method of high order for reaction-diffusion systems,
Math. Comp., 70 (2001), pp. 1481–1501.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
1146
D. ESTEP, V. GINTING, D. ROPP, J. N. SHADID, AND S. TAVENER
[9] S. Eastman, Analysis and Application of the Nonlinear Power Method, Ph.D. thesis, Colorado
State University, Fort Collins, CO, 2005.
[10] K. Eriksson, D. Estep, P. Hansbo, and C. Johnson, Introduction to adaptive methods for
differential equations, in Acta Numerica, 1995, Cambridge University Press, Cambridge,
UK, 1995, pp. 105–158.
[11] K. Eriksson, D. Estep, P. Hansbo, and C. Johnson, Computational Differential Equations,
Cambridge University Press, Cambridge, UK, 1996.
[12] D. Estep, An analysis of numerical approximations of metastable solutions of the bistable
equation, Nonlinearity, 7 (1994), pp. 1445–1462.
[13] D. Estep, A posteriori error bounds and global error control for approximation of ordinary
differential equations, SIAM J. Numer. Anal., 32 (1995), pp. 1–48.
[14] D. Estep, A Short Course on Duality, Adjoint Operators, Green’s Functions, and A Posteriori Error Analysis, Sandia National Laboratories, Albuquerque, NM, 2004. Notes can be
downloaded from http://math.colostate.edu/˜estep.
[15] D. Estep and D. French, Global error control for the continuous Galerkin finite element
method for ordinary differential equations, RAIRO Modél. Math. Anal. Numér., 28 (1994),
pp. 815–852.
[16] D. Estep and A. M. Stuart, The dynamical behavior of the discontinuous Galerkin method
and related difference schemes, Math. Comp., 71 (2002), pp. 1075–1103.
[17] D. Estep, M. G. Larson, and R. D. Williams, Estimating the error of numerical solutions
of systems of reaction-diffusion equations, Mem. Amer. Math. Soc., 146 (2000).
[18] D. Estep, S. Tavener, and T. Wildey, A posteriori analysis and improved accuracy for an
operator decomposition solution of a conjugate heat transfer problem, SIAM J. Numer.
Anal., to appear.
[19] G. Fusco and J. Hale, Slow-motion manifolds, dormant instability, and singular perturbations, J. Dynam. Differential Equations, 1 (1989), pp. 75–94.
[20] W. Hundsdorfer and J. Verwer, Numerical Solution of Time-Dependent AdvectionDiffusion-Reaction Equations, Springer Ser. Comput. Math. 33, Springer-Verlag, Berlin,
2003.
[21] W. H. Hundsdorfer and J. G. Verwer, Stability and convergence of the Peaceman-Rachford
ADI method for initial-boundary value problems, Math. Comp., 53 (1989), pp. 81–101.
[22] C. Johnson, Error estimates and adaptive time-step control for a class of one-step methods
for stiff ordinary differential equations, SIAM J. Numer. Anal., 25 (1988), pp. 908–926.
[23] G. I. Marchuk, On the theory of the splitting-up method, in Proceedings of the Second Symposium on Numerical Solution of Partial Differential Equations, SVNSPADE, Academic
Press, New York, 1970, pp. 469–500.
[24] G. I. Marchuk, V. I. Agoshkov, and V. P. Shutyaev, Adjoint Equations and Perturbation
Algorithms in Nonlinear Problems, CRC Press, Boca Raton, FL, 1996.
[25] C. C. Ober and J. N. Shadid, Studies on the accuracy of time-integration methods for the
radiation-diffusion equations, J. Comput. Phys., 195 (2004), pp. 743–772.
[26] I. Prigogine and R. Lefever, Symmetry breaking instabilities in dissipative systems, J. Chem.
Phys., 48 (1968), pp. 1695–1700.
[27] D. L. Ropp and J. N. Shadid, Stability of operator splitting methods for systems with indefinite
operators: Reaction-diffusion systems, J. Comput. Phys., 203 (2005), pp. 449–466.
[28] D. L. Ropp, J. N. Shadid, and C. C. Ober, Studies of the accuracy of time integration
methods for reaction-diffusion equations, J. Comput. Phys., 194 (2004), pp. 544–574.
[29] J. Sandelin, Global Estimate and Control of Model, Numerical, and Parameter Error, Ph.D.
thesis, Department of Mathematics, Colorado State University, Fort Collins, CO, 2006.
[30] J. A. Smoller, Shock Waves and Reaction-Diffusion Equations, 2nd ed., Springer-Verlag, New
York, 1983.
[31] B. Sportisse, An analysis of operator splitting techniques in the stiff case, J. Comput. Phys.,
161 (2000), pp. 140–168.
[32] G. Strang, On the construction and comparison of difference schemes, SIAM J. Numer. Anal.,
5 (1968), pp. 506–517.
[33] G. Strang and G. J. Fix, An Analysis of the Finite Element Method, Prentice–Hall Ser.
Automat. Comput., Prentice–Hall, Englewood Cliffs, NJ, 1973.
[34] J. G. Verwer and B. Sportisse, A Note on Operator Splitting Analysis in the Stiff Linear
Case, CWI report MAS-R9801, Amsterdam, The Netherlands, 1998.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.