Document 13191897
advertisement

SIAM J. NUMER. ANAL.
Vol. 46, No. 4, pp. 2068–2089
c 2008 Society for Industrial and Applied Mathematics
A POSTERIORI ANALYSIS AND IMPROVED ACCURACY FOR AN
OPERATOR DECOMPOSITION SOLUTION OF A CONJUGATE
HEAT TRANSFER PROBLEM∗
D. ESTEP† , S. TAVENER‡ , AND T. WILDEY‡
Abstract. We consider the accuracy of an operator decomposition finite element method for a
conjugate heat transfer problem consisting of two materials coupled through a common boundary. We
derive accurate a posteriori error estimates that account for the transfer of error between components
of the operator decomposition method as well as the differences between the adjoints of the full
problem and the discrete iterative system. We use these estimates to guide adaptive mesh refinement.
In addition, we address a loss of order of convergence that results from the decomposition and show
that the order of convergence is limited by the accuracy of the transferred gradient information. We
employ a boundary flux recovery method to regain the expected order of accuracy in an efficient
manner.
Key words. a posteriori error analysis, adaptive mesh refinement, adjoint problem, boundary
flux method, conjugate heat transfer, domain decomposition, finite element method, generalized
Green’s function, goal-oriented error estimates, operator decomposition, residual, transfer error
AMS subject classifications. 65N15, 65N30, 65N50
DOI. 10.1137/060678737
1. Introduction. In this paper, we consider the solution of a conjugate heat
transfer problem by an operator decomposition approach. The goal is to compute a
functional of the temperature of a body composed of two distinct components that
share a common boundary or interface. The two components may have different
conductivities and be subject to different heat sources and boundary conditions. Our
problem therefore consists of a pair of elliptic boundary value problems that are
coupled through boundary conditions posed at the common interface. More generally,
our interest is in situations where there is a small number of interfaces between the
components.
One approach to solve a conjugate heat transfer problem is to directly discretize
the system of coupled elliptic problems and to solve the resulting large global system.
However, there are situations in which this approach is infeasible, e.g., because of
the size of the full global system or because different numerical methods and codes
are to be used for the component problems. Operator decomposition provides an
alternative strategy to solving the fully coupled system. We compute the solution in
each component individually subject to the conditions on the common interface that
∗ Received
by the editors December 28, 2006; accepted for publication (in revised form) January
14, 2008; published electronically April 23, 2008.
http://www.siam.org/journals/sinum/46-4/67873.html
† Department of Mathematics and Department of Statistics, Colorado State University, Fort
Collins, CO 80523 (estep@math.colostate.edu). This author’s work was supported in part by the
Department of Energy (DE-FG02-04ER25620, DE-FG02-05ER25699, and DE-FC02-07ER54909),
the National Aeronautics and Space Administration (NNG04GH63G), the National Science Foundation (DMS-0107832, DMS-0715135, DGE-0221595003, MSPA-CSE-0434354, and ECCS-0700559),
Idaho National Laboratory (00069249), and the Sandia Corporation (PO299784).
‡ Department of Mathematics, Colorado State University, Fort Collins, CO 80523 (tavener@math.
colostate.edu, wildey@math.colostate.edu). The second author’s work was supported in part by the
Department of Energy (DE-FG02-04ER25620). The third author’s work was supported in part by
the Department of Energy (DE-FG02-04ER25620), the National Science Foundation (DMS-0107832),
and the Sandia Corporation (PO299784).
2068
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
CONJUGATE HEAT TRANSFER
2069
are obtained from a numerical solution of the other component. Obtaining a solution
of the full system by operator decomposition therefore requires a (nominally) infinite
iteration in which updated boundary conditions are passed between components.
Operator decomposition is a widely used technique for solving multiphysics, multiscale problems. The general approach is to decompose the problem into components
involving simpler physics over a relatively limited range of scales and then to seek the
solution of the entire system through an iterative procedure involving solutions of
the individual components. This approach is appealing because there is generally
a good understanding of how to solve a broad spectrum of single physics problems
accurately and efficiently and because it provides an alternative to accommodating
multiple scales in one discretization. In some situations, operator decomposition can
be viewed as domain decomposition that allows for very different discretizations in
each component. However, operator decomposition presents an entirely new set of
accuracy and stability issues, some of which are obvious and some subtle and all of
which are difficult to correct. In the case of the conjugate heat transfer, the operator
decomposition causes a loss in the order of the numerical approximation.
In this paper, we perform an a posteriori error analysis of a finite element implementation of the operator decomposition technique and obtain accurate error estimates that are used to guide an adaptive discretization strategy. Our approach is
based on the standard techniques using variational analysis, residuals, and the generalized Green’s function solution to an adjoint problem [3, 6, 15, 17, 18, 22], which we
modify to account for several new features arising from the operator decomposition.
These include the following:
• Numerical errors in the solution of each component are propagated to the
other component through the boundary conditions that are applied.
• Numerical errors in the solution of each of the components at one step of the
iterative procedure are propagated to the next step.
• The adjoint of the full problem and the adjoint of the iterative procedure
are distinct operators whose differences must be recognized when seeking to
obtain accurate error estimates.
These kinds of effects are characteristic of operator decomposition discretizations,
e.g., [9, 10, 14], and generally require extensions of the usual a posteriori analysis
techniques.
In addition to obtaining accurate estimates, we seek to improve the accuracy
of the operator decomposition method in an efficient way. In particular, we adapt
the “boundary flux recovery” technique developed by Wheeler [26] and Carey [7, 8]
to compute normal derivatives on a boundary and show that this can be used to
improve accuracy and, in particular, restore the order of convergence of the numerical
approximation that is lost due to the operator decomposition.
The operator decomposition method we consider is closely related to the nonoverlapping domain decomposition methods as described in, for example, [24, 29, 25, 30].
The major concern of these authors is, however, the convergence of different iterative
methods and the design of effective preconditioners or relaxation parameters, while
the accuracy of the final finite element approximation is usually not addressed, despite the fact that some of the numerical results indicate a loss of accuracy. To our
knowledge, this paper is the first to address the loss of accuracy. Our results would
extend to this particular type of nonoverlapping domain decomposition.
In section 2, we introduce the conjugate heat transfer problem and provide some
notation. We describe the iterative operator decomposition finite element method
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2070
D. ESTEP, S. TAVENER, AND T. WILDEY
and some modifications in section 3, as well as the boundary flux recovery method
used to compute gradients on the common interface. We perform two a posteriori
error analyses in section 4, by using first the adjoint to the fully coupled problem and
then the adjoint to the iterative scheme, and present numerical results to highlight the
differences between the two. We end the section with a brief discussion of adaptive
mesh refinement. In section 5, we carry out an analysis which identifies the transferred gradient information as being responsible for the loss of order of the numerical
approximation and show that using the recovered boundary flux restores the order of
convergence. Our conclusions are presented in section 6.
2. The model for conjugate heat transfer. Let Ω1 and Ω2 be polygonal
domains in R2 or R3 with boundaries ∂Ω1 and ∂Ω2 , respectively, intersecting along
an interface Γ = ∂Ω1 ∩ ∂Ω2 . We consider a system of second order linear elliptic
problems, where the components are coupled through boundary conditions imposed
on Γ,
⎧
L1 u1 = f1 ,
x ∈ Ω1 ,
⎪
⎪
⎪
⎪
⎪
x ∈ ∂Ω1 \Γ,
u1 = 0,
⎪
⎪
⎪
⎨
u1 = u2 ,
x ∈ Γ,
(2.1)
⎪
A1 ∂n u1 = A2 ∂n u2 ,
⎪
⎪
⎪
⎪
⎪
L2 u2 = f2 ,
x ∈ Ω2 ,
⎪
⎪
⎩
x ∈ ∂Ω2 \Γ,
u2 = 0,
where, for i = 1, 2, Li ui = −∇ · (Ai ∇ui ) + ci ui , Ai ≥ Ai,0 > 0, ci , fi are sufficiently
smooth functions and ∂n is the partial derivative in the direction of the unit normal
vector that is directed outwards from ∂Ω1 . The results of this paper extend easily
to general elliptic operators and general Dirichlet, Neumann, and Robin boundary
conditions on the boundaries in the complement of the interface.
We let L2 (Ωi ) denote the space of square integrable functions on Ωi with inner product (·, ·)Ωi and norm · Ωi , but we use (·, ·) = (·, ·)Ωi when the domain
is clear. We use H s (Ωi ) to denote the Sobolev space with real index s associated with the norm · Ωi ,s and seminorm
| · |Ωi ,s . We also use the subspaces
H01 (Ωi ) = v ∈ H 1 (Ωi ), v = 0 on ∂Ωi \Γ .
The weak formulation of (2.1) seeks ui ∈ H01 (Ωi ) such that u1 = u2 on Γ and
(2.2)
2
i=1
ai (ui , vi ) =
2
(fi , vi )
i=1
for all vi ∈ H01 (Ωi ), with ai (ui , v) = Ωi (Ai ∇ui · ∇v + ci ui v) dx for i = 1, 2. By
assuming that each ai (·, ·) is coercive, (2.2) admits a unique weak solution in H01 (Ωi )
[2, 5, 11].
3. An iterative operator decomposition method. We consider iterative
(0)
operator decomposition methods to compute the numerical solution of (2.1). Let u2
be an initial guess for the Dirichlet data along the interface. We solve
⎧
{k}
⎪
x ∈ Ω1 ,
⎨L1 u1 = f1 ,
{k}
(3.1)
u1 = 0,
x ∈ ∂Ω1 \Γ,
⎪
⎩ {k}
{k−1}
u1 = u2
, x ∈ Γ,
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2071
CONJUGATE HEAT TRANSFER
followed by
⎧
{k}
⎪
x ∈ Ω2 ,
⎨L2 u2 = f2 ,
{k}
u2 = 0,
x ∈ ∂Ω2 \Γ,
⎪
⎩
{k}
{k}
A1 ∂n u1 = A2 ∂n u2 , x ∈ Γ,
(3.2)
for k = 1, 2, . . . , N , and iterate until (hopefully) a convergence criteria is satisfied.
{k}
{k}
Throughout this paper, we iterate until u1 − u2 Γ is less than a prescribed
tolerance, i.e., until the continuity condition in the fully coupled problem is satisfied
to within a given tolerance.
3.1. Finite element discretization. We let Ti,h be a triangulation of Ωi into
elements K where the length of the longest edge is hK and h = maxK∈Ti,h hK . We
assume that each triangulation is locally quasi-uniform and Ωi = ∪K∈Ti,h K. However,
the triangulations on either side of Γ are not assumed to be aligned.
We use the piecewise polynomial spaces
S1 = v continuous on Ω1 , v ∈ P 1 (K) for all K ∈ T1,h ,
S2 = v continuous on Ω2 , v ∈ P 1 (K) for all K ∈ T2,h
and the associated spaces
S1,0 = {v ∈ S1 | v = 0, x ∈ ∂Ω1 } ,
S2,0 = {v ∈ S2 | v = 0, x ∈ ∂Ω2 \Γ} ,
where P 1 (K) denotes the space of linear polynomials on an element K. We let πi be
a projection into Si as well as the projection into Si along the interface Γ.
{0}
{k}
For the finite element approximation, given U2 along Γ, compute U1 ∈ S1
satisfying
⎧
{k}
⎪
⎨a1 (U1 , v) = (f1 , v)Ω1 for all v ∈ S1,0 ,
{k}
(3.3)
U1 = 0,
x ∈ ∂Ω1 \Γ,
⎪
⎩ {k}
{k−1}
U1 = π1 U2
,
x ∈ Γ,
{k}
followed by U2 ∈ S2 such that
{k}
{k}
a2 (U2 , v) = (f2 , v)Ω2 − (A1 ∂n U1 , v)Γ
(3.4)
{k}
U2 = 0,
{k}
for k = 1, 2, . . . , N , and iterate until U1
ance.
{k}
− π1 U2
for all v ∈ S2,0 ,
x ∈ ∂Ω2 \Γ,
Γ is smaller than a given toler-
3.2. Relaxed iterations. Unfortunately, the simple iterative given by (3.3)–
(3.4) may not converge. In particular, the convergence depends on the values of A1
and A2 along the interface and the geometry of each region [21, 24, 29]. As a result,
we also consider the following relaxation scheme.
We choose α ∈ [0, 1) and update the Dirichlet interface values with
(3.5)
{k}
U1
{k−1}
= αU1
{k−1}
+ (1 − α)π1 U2
.
Optimal values of α can be found in [24, 29] for A1 = A2 , but optimal relaxation
parameters are often difficult to find for the general problem. Recognition of this
difficulty has prompted the development of, for example, Newton–Krylov methods
[31, 16]. We do not pursue this issue further but rather choose to focus on analyzing
the loss accuracy in the case that the iterations can be forced to converge.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2072
D. ESTEP, S. TAVENER, AND T. WILDEY
3.3. Flux correction. In section 5, we show that operator decomposition results
in a loss of order of convergence of the finite element solution with mesh size h. This
is not completely unexpected due to the lower order of accuracy in the derivative,
specifically O(h) rather than O(h2 ) for the approximation spaces used here. This
reduces the order of the overall approximation to first order. To mitigate this effect,
we use a postprocessing technique developed by Wheeler [26] and Carey [7, 8] to
compute a more accurate boundary flux.
We define the set of elements in T1,h that intersect the boundary by
Γ
T1,h
= {K ∈ T1,h | K ∩ ∂Ω = ∅}
and the corresponding space
Γ
Wh = {v ∈ P 1 (K) with K ∈ T1,h
, v(ηi ) = 0 if ηi ∈
/ ∂Ω},
(3.6)
where {ηi } denotes the nodes of element K, so the degrees of freedom correspond to
the nodes on the boundary. This space will arise later as the difference between a
projection onto T1,h and a second projection onto T1,h that is also required to be zero
on the boundary. We seek σ {k} ∈ Wh satisfying
{k}
−(σ {k} , v)Γ = (f1 , v)Ω1 − a1 (U1
(3.7)
, v) for all v ∈ Wh ,
{k}
where U1 solves (3.3). Green’s identity implies that σ {k} gives an approximation to
the normal flux on the boundary which is relatively inexpensive to compute.
In general, the accuracy of the recovered boundary flux approximation depends
on the regularity of an associated Green’s function [20, 27]. In some cases, though
perhaps not all, the postprocessed flux is O(h2 ) rather than the standard O(h) for
the normal flux of a piecewise linear finite element approximation. However, we show
that the recovered boundary flux leads to a cancellation of the “transfer error” term
in the error representation formula, which is the source of the loss of order. This
fortunate cancellation of errors means that the accuracy of this recovered boundary
flux is only of peripheral interest for our purposes.
We stress that σ {k} is not assumed to be continuous. In fact, if the domain
has a corner on the boundary, the normal derivative is, in general, discontinuous
due to the jump in the normal vector. When Dirichlet conditions are given on each
boundary segment, we implement the method described in [8] and allow two degrees
of freedom to account for the discontinuity. For the application to more general
boundary conditions, such as a Neumann or Robin condition on one segment, or an
interface condition on both, we refer the reader to [28].
Now, as an alternative to (3.4), we may solve
(3.8)
{k}
a2 (U2 , v) = (f2 , v)Ω2 − (σ {k} , v)Γ
{k}
U2 = 0,
for all v ∈ S2,0 ,
x ∈ ∂Ω2 \Γ.
Other possible approaches to mitigating the loss of order include approximating
the boundary flux by using a gradient recovery technique such as the Zienkiewicz–Zhu
patch recovery technique [33] or the polynomial-preserving recovery method [32] or
by using higher order polynomials near the interface to improve the accuracy of the
finite element flux [1, 22]. We had mixed computational success using these other
approaches.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
CONJUGATE HEAT TRANSFER
2073
4. A posteriori error analysis. To estimate the error of the operator decomposition finite element approximation, we apply a posteriori techniques based on
variational analysis and the adjoint problem. In this case, however, the adjoint for
the fully coupled original problem differs significantly from the adjoint problem associated with the discretization of the decomposed system. The motivation to use
operator decomposition suggests that the adjoint of the full problem is unavailable
in practice, and therefore the decomposed adjoint needs to be used to compute error
estimates. The difference between the adjoint problems can be reduced by increasing
the computational work used to solve the decomposed adjoint; however, in practice,
we must consider the issue that the two adjoints lead to significantly different error
representations.
In order to understand the differences, we derive a posteriori error estimates by
using both adjoints. Both analyses begin in the same way. We wish to estimate the
difference between the exact solution to the full problem and the numerical approximation to the solution of the iterative procedure, i.e., E {k} = u−U {k} . We decompose
the error:
E {k} = u − U {k} = u − u{k} + u{k} − U {k} = c{k} + e{k} .
The first component c{k} measures the difference between the exact solution to the
full problem and the exact solution to the iterative problem. If the iterative method
converges, then c{k} → 0. The second component e{k} measures the numerical error
in solving the iterative problem. The adjoint of the fully coupled system can be used
to estimate the total error E {k} , while the decomposed adjoint estimates e{k} . The
two estimates are nearly identical if c{k} ≈ 0.
It is helpful to remark that, in the conventional approach, the adjoint problem is
defined in such a way as to make the formal bilinear identity hold [23, 19], i.e., to make
the boundary terms arising from integration by parts equal to zero. In the analysis
below, we find it convenient to consider the values passed between components as
quantities of interest defined on the common boundary, and we have to alter the
definition of the adjoint problem accordingly.
4.1. The adjoint to the fully coupled problem. The adjoint boundary value
problem for the quantity of interest (ψ, u) = (ψ1 , u1 ) + (ψ2 , u2 ) for the coupled problem (2.1) is
⎧ ∗
L1 φ1 = ψ1 ,
x ∈ Ω1 ,
⎪
⎪
⎪
⎪
⎪
φ1 = 0,
x ∈ ∂Ω1 \Γ,
⎪
⎪
⎪
⎨
φ1 = φ2 ,
x ∈ Γ,
(4.1)
⎪
A
1 ∂n φ1 = A2 ∂n φ2 ,
⎪
⎪
⎪
⎪
⎪
L∗2 φ2 = ψ2 ,
x ∈ Ω2 ,
⎪
⎪
⎩
φ2 = 0,
x ∈ ∂Ω2 \Γ,
where L∗i φi = −∇ · (Ai ∇φi ) + ci φi . We solve (4.1) numerically by using an iterative
operator decomposition approach as for the forward problem. The iterations are
completely independent of the forward iterations.
We can derive an error representation formula for the basic scheme (3.1)–(3.2)
and a weighted relaxation technique (3.5) or when using the postprocessed flux as in
{k}
(3.8). In the discussion below, we use θh to denote the numerical flux passed at the
kth iteration from Ω1 to Ω2 .
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2074
D. ESTEP, S. TAVENER, AND T. WILDEY
To begin, we multiply by (ψ1 , ψ2 )T , integrate, and apply the divergence theorem,
noting that u1 = u2 and A1 ∂n φ1 = A2 ∂n φ2 along Γ, to obtain
(ψ1 , e1 ) + (ψ2 , e2 ) = a1 (e1 , φ1 ) + a2 (e2 , φ2 )
{k}
+ (U1
{k}
, A1 ∂n φ1 )Γ − (U2
, A2 ∂n φ2 )Γ .
Observe that the test space S1,0 consists of functions that are zero along the interface,
while, in general, φ1 is not zero along Γ. This means that the projection of φ1 into
S1,0 cannot be the interpolant. We define a new projection π10 : H 2 → S1,0 such that
for any node xi
/ Γ,
π1 φ(xi ), xi ∈
0
(4.2)
π1 φ(xi ) =
0,
xi ∈ Γ.
We also observe that
{k}
a2 (e2 , π2 φ2 ) = −(A1 ∂n u1 , π2 φ2 )Γ + (θh , π2 φ2 )Γ ,
and
a1 (u1 , φ1 − π10 φ1 ) = (f1 , φ1 − π10 φ1 ) + (A1 ∂n u1 , φ1 )Γ ,
a2 (u2 , φ2 − π2 φ2 ) = (f2 , φ2 − π2 φ2 ) − (A1 ∂n u1 , φ2 − π2 φ2 )Γ ,
since the adjoint solutions are not zero along Γ.
By using the projection (4.2) when invoking Galerkin orthogonality and the equalities above, we have
{k}
(ψ1 , e1 ) + (ψ2 , e2 ) = (f1 , φ1 − π10 φ1 ) − a1 (U1
, φ1 − π10 φ1 )
{k}
+ (f2 , φ2 − π2 φ2 ) − a2 (U2
+
{k}
(U1
−
{k}
U2 , A1 ∂n φ1 )Γ
, φ2 − π2 φ2 )
{k}
+ (θh , π2 φ2 )Γ .
Next, we define π∂ φ1 = π1 φ1 − π10 φ1 , which is nonzero only near the interface
due to the definition of π10 φ1 and is an element of Wh defined in (3.6). Substituting
π10 φ1 = π1 φ1 − π∂ φ1 gives
{k}
(ψ1 , e1 ) + (ψ2 , e2 ) = (f1 , φ1 − π1 φ1 ) − a1 (U1
, φ1 − π1 φ1 )
{k}
+ (f2 , φ2 − π2 φ2 ) − a2 (U2
, φ2 − π2 φ2 )
{k}
+ (f1 , π∂ φ1 ) − a1 (U1 , π∂ φ1 )
{k}
{k}
+ (U1 − U2 , A1 ∂n φ1 )Γ +
{k}
(θh , π2 φ2 )Γ .
Finally (3.7) implies that the recovered boundary flux σ {k} satisfies
{k}
−(σ {k} , π∂ φ1 )Γ = (f1 , π∂ φ1 )Ω1 − a1 (U1
, π∂ φ1 ).
Since π∂ φ1 = π1 φ1 along Γ, we conclude the following result.
{k}
{k}
Theorem 4.1. The errors e1 = u1 − U1 and e2 = u2 − U2 satisfy
{k}
(ψ1 , e1 ) + (ψ2 , e2 ) = (f1 , φ1 − π1 φ1 ) − a1 (U1
, φ1 − π1 φ1 )
{k}
+ (f2 , φ2 − π2 φ2 ) − a2 (U2
(4.3)
, φ2 − π2 φ2 )
{k}
{k}
+ (U1 − U2 , A1 ∂n φ1 )Γ
{k}
+ (θh , π2 φ2 )Γ − (σ {k} , π1 φ1 )Γ .
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2075
CONJUGATE HEAT TRANSFER
The error has been decomposed into two typical discretization components, an
iterative component, and a component reflecting the error arising from the transfer
of derivative information. The iterative component can be decomposed:
{k}
(U1
{k}
− U2
{k}
, A1 ∂n φ1 )Γ = (U1
{k}
− π1 U2
{k}
, A1 ∂n φ1 )Γ + (π1 U2
{k}
− U2
, A1 ∂n φ1 )Γ ,
which represents an iteration error and a projection error. The choice of derivative
information transferred from Ω1 to Ω2 has a significant impact on the transfer component.
{k}
{k}
• Suppose that we set θh = A1 ∂n U1 , and then
{k}
(θh , π2 φ2 )Γ − (σ {k} , π1 φ1 )Γ
{k}
= (A1 ∂n U1
− σ {k} , π2 φ2 )Γ + (σ {k} , π2 φ2 − π1 φ1 )Γ ,
which represents a transfer error and a projection error.
{k}
• Suppose that we set θh = σ {k} , and then
{k}
(θh , π2 φ2 )Γ − (σ {k} , π1 φ1 )Γ = (σ {k} , π2 φ2 − π1 φ1 )Γ ,
which represents only a projection error with no transfer error.
4.2. The adjoint to the operator decomposition iterative scheme. Next,
we derive an error representation by using the natural adjoint for the iterative system
{k−1}
{k}
{k}
{k}
(3.1)–(3.2), where we set U1 = π1 U2
and A2 ∂n U2 = A1 ∂n U1 . This adjoint
avoids the formulation of a globally coupled adjoint and reads
(4.4)
⎧
{k}
∗ {k}
⎪
⎨L1 φ1 = ψ1 , x ∈ Ω1 ,
{k}
φ1 = 0,
x ∈ ∂Ω1 \Γ,
⎪
⎩ {k}
{k}
φ1 = φ2 ,
x ∈ Γ,
(4.5)
⎧
{k}
∗ {k}
⎪
x ∈ Ω2 ,
⎨L2 φ2 = ψ2 ,
{k}
φ2 = 0,
x ∈ ∂Ω2 \Γ,
⎪
⎩
{k}
{k+1}
A2 ∂n φ2 = A1 ∂n φ1
, x ∈ Γ,
{N +1}
= 0. Note that the adjoint system is defined
for k = N, . . . , 1, with A1 ∂n φ1
as “backwards.” In the reasonable case in which we seek information from the final
{1}
{1}
{N −1}
iterate, the data for the adjoint problem would be ψ1 = ψ2 = · · · = ψ1
=
{N −1}
{N }
{N }
ψ2
= 0, with ψ1
and ψ2
chosen appropriately.
We derive the error representation formula for this system by observing that
N
k=1
N
∗ {k} {k}
{k} {k}
{k} {k} {k} {k} (ψ1 , e1 ) + (ψ2 , e2 ) =
(L1 φ1 , e1 ) + (L∗2 φ2 , e2 )
k=1
and applying the steps used to derive (4.3). This provides the following theorem.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2076
D. ESTEP, S. TAVENER, AND T. WILDEY
{1}
{1}
{N }
{N }
Theorem 4.2. The errors e1 , e2 , . . . , e1
(4.6)
N
, e2
satisfy
{k} {k}
{k} {k} (ψ1 , e1 ) + (ψ2 , e2 )
k=1
=
N {k}
(f1 , φ1
{k}
{k}
− π1 φ1 ) − a1 (U1
{k}
, φ1
{k}
− π1 φ1 )
k=1
{k}
+ (f2 , φ2
{k}
{k}
− π2 φ2 ) − a2 (U2
{k}
+ (U1
{k−1}
− U2
+
{k}
, φ2
{k}
− π2 φ2 )
{k}
, A1 ∂n φ1 )Γ
{k}
{k}
(A1 ∂n U1 , π1 φ1 )Γ
− (σ
{k}
{k}
, π2 φ2 )Γ
.
It is possible to define adjoints for more complicated iterative methods, but it
{k}
{k−1}
may be difficult. For example, relaxation techniques couple U1 to both U2
and
{k−1}
U1
, which affects how the adjoint variables are coupled. In addition, using the
postprocessed numerical flux given in section 3.2 requires defining the adjoint of the
postprocessing procedure.
4.3. Numerical results. We illustrate the a posteriori estimates in sections 4.1
and 4.2.
Example 4.1. We triangulate the domains Ω1 = [−0.25, 0.25] × [−0.25, 0.25] and
Ω2 = ([−1, 1] × [−1, 1]) \Ω1 independently (see Figure 4.1) and consider the elliptic
interface problem
⎧
⎪
−∇
x ∈ Ω1 ,
⎪
· (A1 ∇u1 ) = f1 ,
⎪
⎪
⎪
⎪
⎨ u1 = u2 ,
x ∈ Γ,
(4.7)
A1 ∂n u1 = A2 ∂n u2 ,
⎪
⎪
⎪−∇ · (A2 ∇u2 ) = f2 ,
x ∈ Ω2 ,
⎪
⎪
⎪
⎩
x ∈ ∂Ω2 \Γ,
u2 = 0,
with very different diffusion coefficients A1 = 1, A2 = 103 . The data f1 (x, y) and
f2 (x, y) are chosen so the true solutions are u1 = 103 sin(4πx) sin(4πy) and u2 =
{k}
{k−1}
sin(4πx) sin(4πy). We solve this by using (3.3)–(3.4) with U1
= π1 U2
and
Fig. 4.1. Triangulations of Ω1 and Ω2 that do not match along the interface.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2077
CONJUGATE HEAT TRANSFER
Table 4.1
Error estimates and effectivity ratios using the adjoint of the fully coupled (F.C.) system.
1.
2.
3.
ψ1
4
4
0
ψ2
4/15
0
4/15
True error
−0.87344
−0.84291
−0.03053
F.C. adjoint
−0.87309
−0.84258
−0.03051
Effect. ratio
0.9996
0.9996
0.9992
4.
δ̂0
0
−0.39863
−0.39688
0.9956
Table 4.2
Error estimates and effectivity ratios using the adjoint of the operator decomposition (O.D.)
system.
1.
2.
3.
ψ1
4
4
0
ψ2
4/15
0
4/15
True error
−0.87344
−0.84291
−0.03053
O.D. adjoint
−0.87309
−0.84259
−0.03051
Effect. ratio
0.9996
0.9996
0.9992
4.
δ̂0
0
−0.39863
−0.38688
0.9956
iterate until U1 − π1 U2 Γ < 1E − 6. We consider several quantities of interest:
1. the global average value,
2. the average value over Ω1 ,
3. the average value over Ω2 ,
4. the value of u1 at the point (0, 0) computed by using the approximate delta
2
2
function δ̂0 (x, y) = 400
π exp(−400x − 400y ).
First, we use an independent iterative scheme to solve the adjoint of the fully
coupled problem and iterate until our convergence criteria are met. We display the
error estimates for each of the quantities of interest in Table 4.1.
Next, we solve the adjoint to the operator decomposition method and give these
results in Table 4.2. Note that the number of iterations as well as the values of
the relaxation parameters are determined by the number of iterations used in the
solution of the forward operator decomposition method. In this case, four iterations
were required with α = 0.
Note that, when the forward iterations have fully converged, the error estimates
provided by the fully coupled and operator decomposition adjoints are nearly identical.
Example 4.2. Next we consider neighboring domains Ω1 = [0, 1] × [0, 1] and
Ω2 = ([1, 2] × [0, 1]) with independent triangulations and the elliptic interface problem
⎧
−∇ · (A1 ∇u1 ) = f1 ,
x ∈ Ω1 ,
⎪
⎪
⎪
⎪
⎪
u
=
0,
x ∈ ∂Ω1 \Γ,
⎪
⎪
1
⎪
⎨ u =u ,
1
2
(4.8)
x ∈ Γ,
⎪
A1 ∂n u1 = A2 ∂n u2 ,
⎪
⎪
⎪
⎪
⎪
x ∈ Ω2 ,
⎪
⎪−∇ · (A2 ∇u2 ) = f2 ,
⎩
u2 = 0,
x ∈ ∂Ω2 \Γ,
where A1 = 1, A2 = 3, and f1 (x, y) and f2 (x, y) are chosen so the true solutions are
u2 = sin(2πx) sin(2πy) and u1 = 3u2 . The quantity of interest is the average value
over Ω1 ∪ Ω2 , so ψ1 = ψ2 = 1.
This experiment demonstrates that the error representation formulas (4.3) and
(4.6) may give different estimates if the operator decomposition method used to solve
the forward problem has failed to converge completely. We fix the number of iterations
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2078
D. ESTEP, S. TAVENER, AND T. WILDEY
1.2
1.6
Adjoint for Fully Coupled Problem
Adjoint for Operator Decomposition Method
Size of adjoints
Effectivity Ratios
1.1
1
0.9
1.2
0.8
0.4
0.8
2
4
6
8
10
Iterations
12
14
0
16
0
5
10
15
Iteration
(a) Effectivity ratios
(b) Decay of influence
Fig. 4.2. On the left, we show a comparison of the effectivity ratios using the two adjoints for
a given number of iterations used for the operator decomposition method for the forward problem.
{k}
{k}
On the right, we plot φ1 + φ2 to show the decay of influence of errors that occur in previous
iterations.
in the operator decomposition method for (4.8) and use (3.3) and (3.4) to approximate
the solution. We solve the fully coupled adjoint iteratively by using a sufficiently large
number of iterations for convergence. However, the number of iterations for the adjoint
of the iterative system (4.4)–(4.5) is determined by the number of iterations for the
forward problem.
In Figure 4.2(a), we plot the effectivity ratios for the two estimates against the
number of iterations. We observe that the adjoint for the operator decomposition
method does not produce accurate estimates until a sufficient number of iterations
for the forward problem have been carried out. This implies that, during the early
part of the iterative process, the iterative component of the error c{k} = u − u{k}
dominates the estimate.
If the iterative method converges, we expect that the effect of the initial guess and
the first few iterations would diminish. This is reflected in Figure 4.2(b), where we fix
{k}
the number of iterations N = 15 and plot the L2 norm of the iterative adjoint φ1
{k}
and φ2 over Ω1 and Ω2 , respectively, at each iteration for 1 ≤ k ≤ 15. We observe
that the norm decays rapidly as k decreases from N . Recall that the adjoint to the
iterative system is solved “backwards” from N = 15. The rapid decay indicates that
the norm of the fixed-point operator, and hence the norm of the adjoint fixed-point
operator, is smaller than one. Thus, the influence of errors in previous iterations is
rapidly damped and has little influence on the current error. This implies that we
can compute accurate estimates by using the truncated series
(4.9)
{N }
(ψ1
{N }
, e1
{N }
{N }
) + (ψ2 , e2 )
N {k}
{k}
{k}
{k}
{k}
=
(f1 , φ1 − π1 φ1 ) − a1 (U1 , φ1 − π1 φ1 )
k=M
{k}
− π2 φ2 ) − a2 (U2
{k}
− U2
+ (f2 , φ2
+ (U1
{k}
{k−1}
+
{k}
{k}
, φ2
{k}
− π2 φ2 )
{k}
, A1 ∂n φ1 )Γ
{k}
{k}
(A1 ∂n U1 , π1 φ1 )Γ
− (σ
{k}
{k}
, π2 φ2 )Γ
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
,
2079
CONJUGATE HEAT TRANSFER
1.15
1.1
1.05
Effectivity Ratio
1
0.95
0.9
0.85
0.8
0.75
0.7
0.65
0
2
4
6
8
10
12
14
Number of Terms (N−M+1)
Fig. 4.3. A comparison of the effectivity ratios computed by using a truncated error representation.
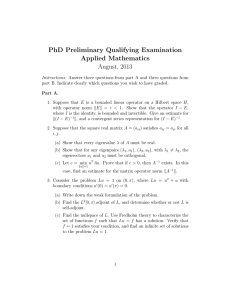
Fig. 4.4. Adaptive mesh for the quantity of interest equal to the value of u2 at the point
(1.75, 0.25).
where 1 ≤ M ≤ N , in place of the full series (4.6). This significantly reduces the computational cost associated with computing a series of adjoint problems. In Figure 4.3
we plot the effectivity ratio for the global average value where we truncate the error
representation and compute only the last N − M + 1 terms.
4.4. Adaptive refinement. We use the a posteriori error estimate as the basis
for adaptivity by employing the standard “optimization framework” after writing the
estimate as a sum of element contributions and introducing norms [12, 13, 4, 3]. An
element K is marked for refinement when the local error indicator is larger than a local
tolerance, usually the global tolerance divided by the current number of elements.
Example 4.3. We demonstrate the adaptive procedure on the model problem (4.8)
with the quantity of interest equal to the value of u2 at the point (1.75, 0.25), which we
approximate by choosing ψ1 = 0 and ψ2 = 400/π exp(−400(x−1.75)2 −400(y−0.25)2 ).
Figure 4.4 shows the results after 3 refinement steps. We solve (3.3)–(3.4) and observe
that refinement occurs within Ω1 along Γ, which reflects the impact of numerical errors
in the normal derivative on the quantity of interest.
5. An analysis of the loss of order. In practice, the iterative operator decomposition technique (3.3) and (3.4) is occasionally observed to result in O(h) convergence rather than the O(h2 ) convergence that is obtained when solving the fully
coupled problem. This loss of order results from passing the normal derivative of the
finite element approximation, which is only O(h). Passing the recovered boundary
flux restores the full order of convergence. We use the adjoint for the fully coupled
problem to derive a posteriori error bounds for the iterative approximations. Numerical examples are provided at the end of the section.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2080
D. ESTEP, S. TAVENER, AND T. WILDEY
5.1. L2 error bounds. Let u1 ∈ H 1+α1 (Ω1 ) and u2 ∈ H 1+α2 (Ω2 ) be the solu{k}
{k}
tions to (2.1), with 0 ≤ α1 , α2 ≤ 1, and U1 and U2 be the solutions of the operator
{k}
decomposition scheme at the kth iteration. Let θh denote the flux passed at the kth
1+α1
1+α2
iteration. Let φ1 ∈ H
(Ω1 ) and φ2 ∈ H
(Ω2 ), and pose the adjoint problem
(4.1) with ψ1 = e1 /e1 Ω1 and ψ2 = e2 /e2 Ω2 . Starting with (4.3), integration by
parts over each element K gives
e1 Ω1 + e2 Ω2 = I1 + I2 + I3 + I4 ,
where
1
{k}
[A1 ∂n U1 ], φ1 − π1 φ1
2
K
∂K
K∈T1,h
1
{k}
{k}
[A2 ∂n U2 ], φ2 − π2 φ2
f2 − L2 U2 , φ2 − π2 φ2
+
+
,
2
K
∂K
K∈T2,h
{k}
{k}
I2 = A2 ∂n U2 , φ2 − π2 φ2 − A1 ∂n U1 , φ1 − π1 φ1 ,
Γ
Γ
{k}
{k}
I3 = A1 ∂n φ1 , U1 − U2
,
Γ
{k}
I4 = θh , π2 φ2 − σ {k} , π1 φ1 ,
I1 =
{k}
f1 − L1 U1
Γ
, φ1 − π1 φ1
+
Γ
{k}
[Ai ∂n Ui ]
where
denotes the jump in the normal derivative across an element edge.
The first term I1 is a standard a posteriori error bound for elliptic problems and
is not affected by nonmatching triangulations along the interface or by transfer error.
The second term I2 is similar to the jump terms along element edges in I1 . The third
term I3 represents the jump in the Dirichlet values across the interface. Finally, the
fourth term I4 represents the difference between the flux passed from Ω1 to Ω2 and
the flux obtained via the boundary flux recovery technique.
We construct Lemmas 5.1–5.4 below to bound I1 –I4 individually. In each of
these lemmas we first provide the general bound when the triangulations do not
match across the boundary and then show the simplification that arises for matching
triangulations. We then combine these four lemmas into Theorems 5.5 and 5.7, which
give error bounds for the basic iteration (3.3) and (3.4) and when using the recovered
boundary flux (3.8), respectively. These two theorems describe the general result
when the triangulations do not match across the boundary, while the simplification
given matching triangulations is provided as a corollary.
In the following analysis, it is useful to define a smooth function to separate the
discretization error arising within an iteration from the transfer and iteration errors.
{k}
Let ũ1 ∈ H 1+α1 (Ω1 ) solve
⎧
{k}
1
⎪
⎨a1 (ũ1 , v) = (f1 , v)Ω1 for all v ∈ H0 (Ω1 ),
{k}
(5.1)
ũ1 = 0,
x ∈ ∂Ω1 \Γ,
⎪
⎩ {k}
{k}
ũ1 = g1 ,
x ∈ Γ,
{k}
{k}
where g1 is a smooth function, with π1 g1 the Dirichlet data provided on Γ at the
kth iteration.
{k}
Similarly, let ũ2 ∈ H 1+α2 (Ω2 ) solve
{k}
{k}
a2 (ũ2 , v) = (f2 , v)Ω2 + (g2 , v)Γ for all v ∈ H01 (Ω2 ),
(5.2)
{k}
ũ2 = 0,
x ∈ ∂Ω2 \Γ,
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2081
CONJUGATE HEAT TRANSFER
{k}
{k}
where g2 is a smooth function such that the L2 projection of g2
{k}
data on Γ at the kth iteration, namely, θh .
Standard finite element theory can be applied to bound
{k}
{k}
{k}
1
ũ1 − U1 Ω1 ,1 ≤ Chα
f
,
+
g
1
Ω
Γ
1
1
1
{k}
{k}
{k}
α2
ũ2 − U2 Ω2 ,1 ≤ Ch2 f2 Ω2 + g2 Γ .
is the Neumann
Lemma 5.1 (bound on I1 ).
{k}
1+α1
f1 − L1 U1 K
ChK
|φ1 |K,1+α1
·
I1 ≤
−1/2
{k}
1
1
Ch1+α
|φ1 |K,1+α1
[A1 ∂n U1 ]∂K
K
2 hK
K∈T1,h
{k}
2
f2 − L2 U2 K
Ch1+α
|φ2 |K,1+α2
K
·
.
+
−1/2
{k}
2
1
Ch1+α
|φ2 |K,1+α2
[A2 ∂n U2 ]∂K
K
2 hK
K∈T
2,h
Proof. Apply standard arguments by using the Cauchy–Schwarz inequality and a
trace inequality.
{k}
{k}
Remark 5.1. If u1 ∈ H 2 (Ω1 ), we add and subtract A1 ∂n ũ1 and use the
Cauchy–Schwarz and trace inequalities to bound the jump terms
{k}
[A1 ∂n U1
1/2
{k}
1/2
{k}
]∂K ≤ ChK ũ1 2,K .
A similar analysis shows that
{k}
[A2 ∂n U2
]∂K ≤ ChK ũ2 2,K
{k}
for u2 ∈ H 2 (Ω2 ). Substituting these bounds above shows that I1 converges O(h21 +
h22 ) as expected.
Lemma 5.2 (bound on I2 ). If the triangulations T1,h and T2,h do not match
along the interface, then
−1/2 {k}
{k}
1
I2 ≤ h1 (θh − A1 ∂n U1 )Γ · Ch1+α
|φ1 |1+α1
1
−1/2
{k}
{k}
2
+ h2 (A2 ∂n U2 − θh )Γ · Ch1+α
|φ2 |1+α2
2
{k}
+ θh Γ · (π1 φ1 − π2 φ2 Γ ) ,
where
π1 φ1 − π2 φ2 Γ ≤ π1 φ1 − φ1 Γ + φ2 − π2 φ2 Γ
1/2+α1
≤ C1 h1
1/2+α2
|φ1 |Γ,1/2+α1 + C2 h2
|φ2 |Γ,1/2+α2 .
If the triangulations T1,h and T2,h match along the interface, then
−1/2 {k}
{k}
1
|φ1 |1+α1
I2 ≤ h1 (θh − A1 ∂n U1 )Γ · Ch1+α
1
−1/2
{k}
{k}
2
+ h2 (A2 ∂n U2 − θh )Γ · Ch1+α
|φ2 |1+α2 .
2
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2082
D. ESTEP, S. TAVENER, AND T. WILDEY
{k}
{k}
Proof. We add and subtract (θh , φ1 − π1 φ1 )Γ and (θh , φ2 − π2 φ2 )Γ and use
the fact that φ1 = φ2 on the interface to give
{k}
I2 = (θh
{k}
− A1 ∂n U1
{k}
, φ1 − π1 φ1 )Γ + (A2 ∂n U2
{k}
− θh , φ2 − π2 φ2 )Γ
{k}
+ (θh , π1 φ1 − π2 φ2 )Γ .
Observe that π1 φ1 = π2 φ2 if the triangulations match along the interface. We apply the Cauchy–Schwarz and trace inequalities and an interpolation result to complete
the proof.
{k}
{k}
Remark 5.2. If we assume that ũ1 ∈ H 2 (Ω1 ) and ũ2 ∈ H 2 (Ω2 ), then we can
bound
{k}
{k}
1/2
{k}
θh − A1 ∂n U1 Γ ≤ Ch1 ũ1 2,Ω1 ,
{k}
{k}
1/2
{k}
A2 ∂n U2 − θh Γ ≤ Ch2 ũ2 2,Ω2 ,
{k}
{k}
by adding and subtracting A1 ∂n ũ1 and g2 to the first and second equations, respectively, and applying standard finite element results and the fact that the recovered
boundary flux is at least as accurate as the finite element flux [26, 7, 8, 27]. Note that
{k}
{k}
the first equation is zero if θh = A1 ∂n U1 . Substituting these bounds above shows
2
2
that I2 converges O(h1 + h2 ).
Lemma 5.3 (bound on I3 ). If the triangulations T1,h and T2,h do not match
along the interface, then
{k}
{k}
I3 ≤ (A1 ∂n φ1 Γ ) · U1 − π1 U2 Γ
{k}
{k}
+ (A1 ∂n φ1 Γ ) · π1 U2 − U2 Γ ,
where
{k}
π1 U2
{k}
− U2
1/2+α1
Γ ≤ C1 h1
|û{k} |Γ,1/2+α1 + C2 h2
1/2+α2
|û{k} |Γ,1/2+α2 ,
{k}
with û{k} a smooth function defined on the interface such that π1 û{k} = π1 U2 and
{k}
π2 û{k} = U2 . If the triangulations T1,h and T2,h match along the interface, then
{k}
{k}
I3 ≤ (A1 ∂n φ1 Γ ) · U1 − π1 U2 Γ .
{k}
Proof. Rewrite I3 by adding and subtracting (A1 ∂n φ1 , π1 U2
{k}
I3 = (A1 ∂n φ1 , π1 U1
{k}
{k}
− π1 U2
{k}
)Γ + (A1 ∂n φ1 , π1 U2
)Γ to get
{k}
− U2
)Γ .
{k}
To bound π1 U2 − U2 Γ we add and subtract û{k} and apply Cauchy–Schwarz
and trace inequalities giving
{k}
π1 U2
{k}
− U2
{k}
1/2+α1
Γ ≤ C1 h1
|û{k} |Γ,1/2+α1 + C2 h2
1/2+α2
|û{k} |Γ,1/2+α2 .
{k}
= U2 if the triangulations match along the interface. We
Observe that π1 U2
apply the Cauchy–Schwarz inequality to complete the proof.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2083
CONJUGATE HEAT TRANSFER
Lemma 5.4 (bound on I4 ).
{k}
(i) If the triangulations T1,h and T2,h do not match along the interface and θh =
{k}
A1 ∂n U1 , then
{k}
{k}
{k}
I4 ≤ A1 ∂n U1 − A1 ∂n ũ1 Γ + A1 ∂n ũ1 − σ {k} Γ · (π2 φ2 Γ )
+ σ {k} Γ · (π2 φ2 − π1 φ1 Γ ) ,
where
1/2+α1
π2 φ2 − π1 φ1 Γ ≤ C1 h1
1/2+α2
|φ1 |Γ,1/2+α1 + C2 h2
|φ2 |Γ,1/2+α2 .
{k}
(ii) If the triangulations T1,h and T2,h match along the interface and θh =
{k}
A1 ∂n U1 , then
{k}
{k}
{k}
I4 ≤ A1 ∂n U1 − A1 ∂n ũ1 Γ + A1 ∂n ũ1 − σ {k} Γ · (π2 φ2 Γ ) .
{k}
(iii) If the triangulations T1,h and T2,h do not match along the interface and θh
σ {k} , then
I4 ≤ σ {k} Γ · (π2 φ2 − π1 φ1 Γ ) ,
=
where
1/2+α1
π2 φ2 − π1 φ1 Γ ≤ C1 h1
1/2+α2
|φ1 |Γ,1/2+α1 + C2 h2
|φ2 |Γ,1/2+α2 .
{k}
(iv) If the triangulations T1,h and T2,h match along the interface and θh
then
= σ {k} ,
I4 = 0.
Proof. We add and subtract (σ {k} , π2 φ2 )Γ and use φ1 = φ2 along Γ to get
{k}
I4 = (θh
− σ {k} , π2 φ2 )Γ + (σ {k} , π2 φ2 − π1 φ1 )Γ .
{k}
Clearly, if θh = σ {k} , then the first term drops out. If the triangulations match
along the interface, then π1 φ1 = π2 φ2 , and the second term drops out. We add and
{k}
subtract (A1 ∂n ũ1 , π2 φ2 )Γ to the first term and apply the Cauchy–Schwarz inequality
to complete the proof.
Remark 5.3. In practice, the error in the normal derivative is typically the same
1
accuracy as the H 1 error, namely, O(hα
1 ). However, an application of the trace
α1 /2
theorem proves only O(h1 ) accuracy. This is not an important issue, however,
since we intend to use the fact that this term is less accurate than the others and
therefore pollutes the L2 error. We assume the error in the normal derivative can be
bounded
{k}
A1 ∂n U1
{k}
− ũ1 Γ ≤ Chβ1 1 f1 Ω1
for α1 /2 ≤ β1 ≤ α1 . The error in the recovered boundary flux can be bounded
{k}
A1 ∂n ũ1
− σ {k} Γ ≤ CS1 hβ1 2 f1 Ω1
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2084
D. ESTEP, S. TAVENER, AND T. WILDEY
for β1 ≤ β2 ≤ α1 + 1, where S1 is a stability factor defined by an associated Green’s
function [20, 27]. In certain situations, the recovered boundary flux is the same order
as the finite element approximation [26, 7, 8], but this result is not known in general.
We emphasize that the accuracy of the recovered boundary flux is immaterial due to
the cancellation in the error representation.
The bounds in Lemmas 5.1–5.4 are combined in the following theorems and corol{k}
{k}
laries. First we consider the case θh = A1 ∂n U1 .
Theorem 5.5. Assume that the triangulations T1,h and T2,h do not match along
{k}
{k}
the interface Γ. If U1 and U2 solve (3.3) and (3.4), respectively, then the errors
{k}
{k}
e1 = u1 − U1 and e2 = u2 − U2 satisfy
{k}
1
f1 − L1 U1 K
Ch1+α
|φ1 |K,1+α1
K
·
e1 Ω1 + e2 Ω2 ≤
−1/2
{k}
1
1
Ch1+α
|φ1 |K,1+α1
[A1 ∂n U1 ]∂K
K
2 hK
K∈T1,h
{k}
2
f2 − L2 U2 K
Ch1+α
|φ2 |K,1+α2
K
·
+
−1/2
{k}
2
1
Ch1+α
|φ2 |K,1+α2
[A2 ∂n U2 ]∂K
K
2 hK
K∈T2,h
−1/2
{k}
{k}
2
|φ2 |1+α2
+ h2 (A2 ∂n U2 − θh )Γ · Ch1+α
2
{k}
{k}
+ (A1 ∂n φ1 Γ ) · U1 − π1 U2 Γ
+ Chβ1 1 f1 Ω1 + CS1 hβ1 2 f1 Ω1 · (π2 φ2 Γ )
1/2+α1 (S2 + S3 )|φ1 |Γ,1/2+α1 + S4 |û|Γ,1/2+α1
+ C1 h1
1/2+α2 + C2 h2
(S2 + S3 )|φ2 |Γ,1/2+α2 + S4 |û|Γ,1/2+α2 ,
with α1 /2 ≤ β1 ≤ α1 , β1 ≤ β2 ≤ α1 + 1, S1 is a stability factor independent of h,
{k}
S2 = A1 ∂n U1 Γ , S3 = σ {k} Γ , and S4 = A1 ∂n φ1 Γ .
Corollary 5.6. Assume that the triangulations T1,h and T2,h match along the
{k}
{k}
interface Γ. If U1
and U2
solve (3.3) and (3.4), respectively, then the errors
{k}
{k}
e1 = u1 − U1 and e2 = u2 − U2 satisfy
{k}
1
f1 − L1 U1 K
Ch1+α
|φ1 |K,1+α1
K
·
e1 Ω1 + e2 Ω2 ≤
−1/2
{k}
1
1
Ch1+α
|φ1 |K,1+α1
[A1 ∂n U1 ]∂K
K
2 hK
K∈T1,h
{k}
2
f2 − L2 U2 K
Ch1+α
|φ2 |K,1+α2
K
·
+
−1/2
{k}
2
1
Ch1+α
|φ2 |K,1+α2
[A2 ∂n U2 ]∂K
K
2 hK
K∈T
2,h
−1/2
{k}
{k}
2
+ h2 (A2 ∂n U2 − θh )Γ · Ch1+α
|φ2 |1+α2
2
{k}
{k}
+ (A1 ∂n φ1 Γ ) · U1 − π1 U2 Γ
+ Ch1β1 f1 Ω1 + CS1 hβ1 2 f1 Ω1 · (π2 φ2 Γ ) ,
with α1 /2 ≤ β1 ≤ α1 , β1 ≤ β2 ≤ α1 + 1, and S1 is a stability factor independent of
h1 .
{k}
{k}
The theorem is valid independently of the size of U1 − π1 U2 Γ , but, when
the iteration converges such that this term is negligible, it is clear that the term
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
CONJUGATE HEAT TRANSFER
2085
containing hβ1 decreases at a slower rate than the other terms. In fact, if we assume
that u1 ∈ H 2 (Ω1 ) and u2 ∈ H 2 (Ω2 ), then the other terms are O(h21 ) or O(h22 ), while
{k}
the finite element flux is O(h1 ) at best. Suppose that instead we set θh = σ {k}
instead of the finite element flux. As shown in Lemma 5.4, this reduces I4 to
I4 = (σ {k} , π2 φ2 − π1 φ1 )Γ ,
resulting in the following theorem.
Theorem 5.7. Assume that the triangulations T1,h and T2,h do not match along
{k}
{k}
the interface Γ. If U1 and U2 solve (3.3) and (3.8), respectively, then the errors
{k}
{k}
e1 = u1 − U1 and e2 = u2 − U2 satisfy
e1 Ω1 + e2 Ω2
1
Ch1+α
|φ1 |K,1+α1
K
·
≤
1
Ch1+α
|φ1 |K,1+α1
K
K∈T1,h
{k}
2
f2 − L2 U2 K
Ch1+α
|φ2 |K,1+α2
K
·
+
−1/2
{k}
2
1
Ch1+α
|φ2 |K,1+α2
[A2 ∂n U2 ]∂K
K
2 hK
K∈T2,h
−1/2
{k}
1
|φ1 |1+α1
+ h1 (σ {k} − A1 ∂n U1 )Γ · Ch1+α
1
−1/2
{k}
2
+ h2 (A2 ∂n U2 − σ {k} )Γ · Ch1+α
|φ2 |1+α2
2
{k}
{k}
+ (A1 ∂n φ1 Γ ) · U1 − π1 U2 Γ
1/2+α1 (S2 + S3 )|φ1 |Γ,1/2+α1 + S4 |û|Γ,1/2+α1
+ C1 h1
1/2+α2 (S2 + S3 )|φ2 |Γ,1/2+α2 + S4 |û|Γ,1/2+α2 ,
+ C1 h2
{k}
f1 − L1 U1 K
−1/2
{k}
1
[A1 ∂n U1 ]∂K
2 hK
where S2 = σ {k} Γ , S3 = σ {k} Γ , and S4 = A1 ∂n φ1 Γ .
Corollary 5.8. Assume that the triangulations T1,h and T2,h match along the
{k}
{k}
interface Γ. If U1
and U2
solve (3.3) and (3.8), respectively, then the errors
{k}
{k}
e1 = u1 − U1 and e2 = u2 − U2 satisfy
e1 Ω1 + e2 Ω2
1
Ch1+α
|φ1 |K,1+α1
K
·
≤
1
Ch1+α
|φ1 |K,1+α1
K
K∈T1,h
{k}
2
f2 − L2 U2 K
Ch1+α
|φ2 |K,1+α2
K
+
·
−1/2
{k}
2
1
Ch1+α
|φ2 |K,1+α2
[A2 ∂n U2 ]∂K
K
2 hK
K∈T
{k}
f1 − L1 U1 K
−1/2
{k}
1
[A1 ∂n U1 ]∂K
2 hK
2,h
−1/2
{k}
1
|φ1 |1+α1
+ h1 (σ {k} − A1 ∂n U1 )Γ · Ch1+α
1
−1/2
{k}
2
+ h2 (A2 ∂n U2 − σ {k} )Γ · Ch1+α
|φ2 |1+α2
2
{k}
{k}
+ (A1 ∂n φ1 Γ ) · U1 − π1 U2 Γ .
Comparing Theorem 5.7 with Theorem 5.5 and Corollary 5.8 with Corollary 5.6,
we see that the terms involving hβ1 and hβ2 have dropped out and the optimal order
of convergence of the numerical approximation has been restored.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2086
D. ESTEP, S. TAVENER, AND T. WILDEY
Fully Coupled Solution
Operator Decomposition
–4
–5
–6
–7
1.5
Fully Coupled Solution
Operator Decomposition
–3
log( L2error)
log( L2 error)
–3
–4
–5
–6
2
2.5
3
log(sqrt(degrees of freedom))
–7
1.5
3.5
2
2.5
3
log(sqrt(degrees of freedom))
3.5
Fig. 5.1. Comparison of the L2 error in the fully coupled approximation and the operator
decomposition approximation over Ω1 (left) and Ω2 (right) with mixed boundary conditions on ∂Ωi \Γ
for i = 1, 2.
5.2. Numerical results.
Example 5.1. Let Ω1 = [0, 1] × [0, 1] and Ω2 = [1, 2] × [0, 1], and assume that
the triangulations match along Γ = {(x, y)| x = 1, 0 ≤ y ≤ 1}. Consider the elliptic
interface problem
(5.3)
⎧
−∇
⎪
⎪
· (∇u1 ) = f1 ,
⎪
⎨ u =u ,
1
2
⎪
u
∂
=
∂n u2 ,
n
1
⎪
⎪
⎩
−∇ · (∇u2 ) = f2 ,
x ∈ Ω1 ,
x ∈ Γ,
x ∈ Ω2 ,
where the data f1 (x, y) and f2 (x, y) are chosen so the true solutions are u1 = u2 =
sin(πx/2) sin(2πy). The purpose of this experiment is to show how the asymptotic
O(hβ1 ) convergence rate may be masked by apparently minor changes to the problem
and therefore may be difficult to observe in all situations. We first solve (5.3) with
the boundary conditions
⎧
u1 = 0
⎪
⎪
⎪
⎨∂ u = 2π sin(πx/2)
n 1
⎪
u
2 =0
⎪
⎪
⎩
∂n u2 = 2π sin(πx/2)
along
along
along
along
x = 0 and y = 0,
y = 1,
x = 2 and y = 0,
y = 1.
We set α = 1/2 and iterate until the convergence criteria is met. For comparison,
we also solve (5.3) by using a fully coupled method on the same mesh in COMSOL.
We see, in Figure 5.1, that the fully coupled solution converges quadratically, while
the iterative solution converges linearly. Next, we solve (5.3) with Dirichlet boundary
conditions
u1 = 0, x ∈ ∂Ω1 \Γ,
u2 = 0, x ∈ ∂Ω2 \Γ,
and again we also solve the fully coupled problem for comparison. In Figure 5.2, we
observe that the operator decomposition solution appears to converge quadratically,
but eventually the O(hβ1 ) term dominates and the convergence is ultimately linear.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2087
CONJUGATE HEAT TRANSFER
–2
–2
Fully Coupled Solution
Operator Decomposition
Fully Coupled Solution
Operator Decomposition
–4
log( L2error)
log( L2 error)
–4
–6
–8
–10
–6
–8
–10
2
3
4
5
6
2
log(sqrt(degrees of freedom))
3
4
5
log(sqrt(degrees of freedom))
6
Fig. 5.2. Comparison of the L2 error in the fully coupled approximation and the iterative
approximation over Ω1 (left) and Ω2 (right) with Dirichlet boundary conditions on ∂Ωi \Γ for i = 1, 2.
Using Finite Element Flux
Using Boundary Flux
–5
2
log(L error)
–4
–6
–7
2.8
3
3.2 3.4 3.6 3.8
4
log(sqrt(degrees of freedom))
4.2
4.4
Fig. 5.3. Comparison of the L2 error in the iterative approximation using the finite element
flux and the recovered boundary flux over Ω1 ∪ Ω2 with mixed boundary conditions on ∂Ωi \Γ for
i = 1, 2.
Example 5.2. In the final example we assume that the triangulations do not match
along the interface and consider (5.3) with the mixed boundary conditions
⎧
u1 = 0
along x = 0,
⎪
⎪
⎪
⎪
⎪
along y = 1,
⎪
⎪A1 ∂n u1 = 2π sin(πx/2)
⎪
⎨A ∂ u = −2π sin(πx/2) along y = 0,
1 n 1
⎪u2 = 0
along x = 2,
⎪
⎪
⎪
⎪
⎪
A
∂
u
=
2π
sin(πx/2)
along
y = 1,
2 n 2
⎪
⎪
⎩
A2 ∂n u2 = −2π sin(πx/2) along y = 0.
First, we solve the problem iteratively by using operator decomposition by passing
{k}
the finite element flux A1 ∂n U1 . Next, we use the recovered boundary flux method
to compute and pass σ {k} . In Figure 5.3, we compare the L2 errors over Ω1 ∪ Ω2 on
a series of meshes. We see that the approximations using the finite element flux converge linearly, while the approximations using the recovered boundary flux converge
quadratically.
6. Conclusion. We have conducted an a posteriori error analysis of a finite element implementation of a number of operator decomposition strategies for a canonical
conjugate heat transfer problem. By modifying the standard approach based on variational analysis, residuals, and the generalized Green’s function, we derive accurate
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2088
D. ESTEP, S. TAVENER, AND T. WILDEY
error estimates and use these estimates to guide adaptive mesh refinement. Modifications to the standard error analysis account for the transfer of error between
components of the decomposed operator and interpolation error. Our analysis also
accounts for the differences between the adjoints of the full problem and the operator decomposition system. We show that the loss of order typically observed in the
operator decomposition method is due to inaccuracy of the transferred gradient information, and we show how the boundary flux method can be used to efficiently regain
the expected optimal order of convergence.
REFERENCES
[1] I. Babuska and M. Suri, The p and h-p versions of the finite element method, basic principles
and properties, SIAM Rev., 36 (1994), pp. 578–632.
[2] I. Babuska, The finite element method for elliptic equations with discontinuous coefficients,
Computing, 5 (1970), pp. 207–213.
[3] W. Bangerth and R. Rannacher, Adaptive Finite Element Methods for Differential Equations, Birkhauser-Basel, Verlag, Switzerland, 2003.
[4] R. Becker and R. Rannacher, An optimal control approach to a posteriori error estimation
in finite element methods, Acta Numer., (2001), pp. 1–102.
[5] J. H. Bramble and J. T. King, A finite element method for interface problems in domains
with smooth boundaries and interfaces, Adv. Comput. Math., 67 (1998), pp. 1–19.
[6] T. Cao, D. Kelly, and M. Ainsworth, Some useful techniques for pointwise and local error
estimates of the quantities of interest in the finite element approximation, ANZIAM J., 42
(2000), pp. 317–339.
[7] G. F. Carey, S. S. Chow, and M. K. Seager, Approximate boundary-flux calculations, Comput. Methods Appl. Mech. Engrg., 50 (1985), pp. 107–120.
[8] G. F. Carey, Derivative calculation from finite element solutions, Comput. Methods Appl.
Mech. Engrg., 35 (1982), pp. 1–14.
[9] V. Carey, D. Estep, and S. Tavener, A posteriori analysis and adaptive error control for
multiscale operator decomposition of elliptic systems I: Triangular systems, SIAM J. Numer. Anal., to appear.
[10] V. Carey, D. Estep, and S. Tavener, A Posteriori Analysis and Adaptive Error Control
for Multiscale Operator Decomposition of Elliptic Systems II: Fully Coupled Systems,
manuscript, 2007.
[11] Z. Chen and J. Zou, Finite element methods and their convergence for elliptic and parabolic
interface problems, Numer. Math, 79 (1998), pp. 175–202.
[12] K. Eriksson, D. Estep, P. Hansbo, and C. Johnson, Introduction to adaptive methods for
differential equations, Acta Numer., (1995), pp. 105–158.
[13] K. Eriksson, D. Estep, P. Hansbo, and C. Johnson, Computational Differential Equations,
Cambridge University Press, London, 1996.
[14] D. Estep, V. Ginting, D. Ropp, J. Shadid, and S. Tavener, An a posteriori - A priori
analysis of multiscale operator splitting, SIAM J. Numer. Anal., 46 (2008), pp. 1116–1146.
[15] D. Estep, M. Holst, and M. Larson, Generalized Green’s functions and the effective domain
of influence, SIAM J. Sci. Comput., 26 (2005), pp. 1314–1339.
[16] D. Estep, S. Tavener, and T. Wildey, Iterative Techniques for the Solution of Coupled
Multiphysics Problems, preprint, 2008.
[17] D. Estep, R. Williams, and M. Larson, Estimating the error of numerical solutions of
systems of reaction-diffusion equations, Mem. Amer. Math. Soc., 146 (2000).
[18] D. Estep, A posteriori error bounds and global error control for approximation of ordinary
differential equations, SIAM J. Numer. Anal., 32 (1995), pp. 1–48.
[19] D. Estep, A Short Course on Duality, Adjoint Operators, Green’s Functions, and A-Posteriori
Error Analysis, Sandia National Laboratories, Albuquerque, NM, 2004.
[20] M. Giles, M. G. Larson, J. M. Levenstam, and E. Suli, Adaptive Error Control for Finite
Element Approximations of the Lift and Drag Coefficients in Viscous Flow, Technical
report NA-97-06, Oxford University Computing Laboratory, 1997.
[21] M. Giles, Stability analysis of numerical interface boundary conditions in fluid-structure thermal analysis, Internat. J. Numer. Methods Fluids, 25 (1997), pp. 421–436.
[22] V. Heuveline and R. Rannacher, Duality-based adaptivity in the hp-finite element method,
J. Numer. Math, 11 (2003), pp. 95–113.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
CONJUGATE HEAT TRANSFER
2089
[23] C. Lanczos, Linear Differential Operators, Dover, New York, 1997.
[24] J. Rice, P. Tsompanopoulus, and E. Vavalis, Interface relaxation methods for elliptic differential equations, Appl. Numer. Math., 32 (2000), pp. 219–245.
[25] B. Smith, P. Bjorstad, and W. Gropp, Domain Decomposition, Cambridge University Press,
London, 1994.
[26] M. F. Wheeler, A Galerkin procedure for estimating the flux for two-point boundary-value
problems using continuous piecewise-polynomial spaces, Numer. Math, 2 (1974), pp. 99–
109.
[27] T. Wildey, D. Estep, and S. Tavener, A posteriori error estimation of approximate boundary
fluxes, Comm. Numer. Methods Engrg., to appear.
[28] T. Wildey, A Posteriori Analysis of Operator Decomposition in Interface Problems, Ph.D.
thesis, Colorado State University, 2007.
[29] D. Yang, A parallel nonoverlapping schwarz domain decomposition method for elliptic interface
problems, IMA J. Numer. Anal., 16 (1996), pp. 75–91.
[30] I. Yotov, A multilevel Newton-Krylov interface solver for multiphysics coupling of flow in
porous media, Numer. Linear Algebra Appl., 8 (2001), pp. 551–570.
[31] I. Yotov, Interface solvers and preconditioners of domain decomposition type for multiphase
flow in multiblock porous media, in Adv. Comput. Theory Pract. 7, Nova Science, Hauppauge, NY, 2001, pp. 157–167.
[32] Z. Zhang and A. Naga, A new finite element gradient recovery method: Superconvergence
property, SIAM J. Sci. Comput., 26 (2005), pp. 1192–1213.
[33] O. Zienkiewicz and J. Zhu, The superconvergent patch recovery and a posteriori error estimates, Internat. J. Numer. Methods Engrg., 33 (1992), pp. 1331–1364 and 1365–1382.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.