Dynamical Modeling of Viral Spread
advertisement

Dynamics at the Horsetooth Volume 2, 2010.
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
Department of Mathematics
Colorado State University
chepusht@math.colostate.edu
Report submitted to Prof. P. Shipman for Math 540, Fall 2010
Abstract. In this paper we study a three-component mathematical model for the spread
of a viral disease in a population of spatially distributed hosts. The model is developed
from the two-component model proposed by Tuckwell and Toubiana in 2007. The
positions of the hosts are randomly generated in a rectangular map. Within-host viralimmune system parameters are generated randomly to provide variability across the
population. Encounters between any pair of individuals are evaluated according to a
Poisson process. Viral transmission depends on the viral loads in donors and occurs
with a given probability ptrans . At any time, the values of the viral load (V ) and the
immune system uninfected (T ) and infected (T ∗ ) effectors for each individual are given
by the solution of a system of three differential equations. We analyze the stability of
the critical points P1 and P2 of the system and discuss numerical solutions for V , T and
T ∗ obtained in Matlab.
Keywords: Epidemic; Spatial stochastic model; Viral spread; Viral dynamics; Viral
population dynamical model.
1
Introduction
Mathematical models of viral dynamics are an important area of biomathematics. Such models can
help in understanding the nature of infectious diseases and, as a result, in developing effective drug
treatment. The immune system is a complex mechanism and to model its response to viral infection
in every detail is a too complicated task. Tuckwell and Toubiana (2007) proposed to consider spatial
locations of the hosts combined with statistical distributions of the dynamics parameters to provide
variety in the population immune properties. They described a mathematical model for a simplified
two-dimensional system of effectors and virus contained in each individual and mentioned that it
can be easily incorporated for a three-components system. So, in this paper we consider a model of
each host in the population at time t containing virus concentration V (t), uninfected but susceptible
effectors (T-cells) T (t) and productively infected effectors (T-cells) T ∗ (t). Using the notation of
Stafford et al. (2000), in the absence of interaction between hosts, V (t), T (t) and T ∗ (t) evolve
according to the equations
1
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
dT
= λ − dT − kT V,
dt
dT ∗
= kT V − δT ∗ ,
dt
dV
= πT ∗ − cV − kT V,
dt
(1)
(2)
(3)
where λ is the rate of production of effectors, d is the per capita removal (death) rate of effectors,
k determines the rate of production of effectors per unit amount of virus. Productively infected
cells produce virions at the rate π and die with rate δ per cell, virus is cleared with rate constant c.
cδ
dc
), λδ − (π−δ)k
, λ(π−δ)
− kd ).
The system has two critical points P1 = ( λd , 0, 0) and P2 = ( (π−δ)k
cδ
If λ = 0, P1 is at the origin and is an asymptotically stable node. Otherwise, it is a saddle point if
1 < (π−δ)kλ
dδc , and the disease is promoted. If the latter inequality reversed, P1 is an asymptotically
stable node, and the disease is demoted. Note that since the associated eigenvalues for the system
(1)-(3) are always real, P1 can not be a spiral point.
There are three possibilities for the second critical point P2 : unstable saddle, stable node or stable
spiral point. We note that P2 may occur at unphysical values of T ∗ and V . The condition for P2
to occur at physical values, namely 1 < (π−δ)kλ
dδc , is exactly the condition for P1 to be an unstable
saddle point. For a detailed analysis of the nature of equilibria, see Tuckwell and Wan (2000). We
will see in the following section that for the parameters generated from the 10-patient data given
by Stafford et al. (2000), P1 is a saddle point and P2 is a stable spiral point more than 90% of the
time.
2
The Mathematical Model
1
0.9
0.8
0.7
Y
0.6
0.5
0.4
0.3
0.2
0.1
0
0
0.1
0.2
0.3
0.4
0.5
X
0.6
0.7
0.8
0.9
1
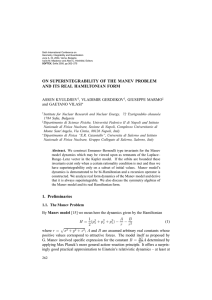
Figure 1: Random spatial host population of n = 100 individuals with coordinates (Xi , Yi ), i =
1, . . . , n. A red circle marks a randomly chosen initially infected host.
Consider a two-dimensional habitat, where locations of n individuals are determined by the
coordinates (Xi , Yi ), i = 1, . . . , n. Xi and Yi are taken to be uniformly distributed on (0, a) and
Dynamics at the Horsetooth
2
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
Parameter
Mean
Min
Max
0.01089
0.1089
Standard
deviation
0.005727
0.05727
d, day−1
λ, d ∗ (10 cells
µl )
0.0043
0.043
0.020
0.20
(µl
) x 10−3
k, ( virions∗day
δ, day−1
π, virions x day−1
c, day−1
0.001179
0.3660
1.426.8
3
0.001422
0.193
2049.36
0
0.00019
0.13
98
3
0.00480
0.80
7100
3
Table 1: Distibutions of viral and host immune system parameters.
(0, b), respectively. A typical random spatial distribution for n = 100 and a = b = 1 can be seen in
Figure 1.
When there is no interaction between hosts, the stochastic differential equations describing the
evolution of the viral and effectors population in the ith individual of the habitat are given by:
dTi
= λi − di Ti − ki Ti Vi ,
dt
dTi∗
= ki Ti Vi − δi Ti∗ ,
dt
dV
= πTi∗ − ci Vi − ki Ti Vi ,
dt
i δi
), λδii −
and has equilibria at P1,i = ( λdii , 0, 0) and P2,i = ( (πic−δ
i )ki
(4)
(5)
(6)
λi (πi −δi )
di ci
ci δi
(πi −δi )ki ,
−
di
ki ).
To provide variability across the habitat, the nonegative parameters λi , di , ki , πi , δi , ci are
randomly distributed. For the purpose of this study, we used the parameters obtained from the
10-patient data given by Stafford et al. (2000), see Table 1.
Figures 2 and 3 show examples of randomly distributed positions of the critical points P1,i and
P2,i , respectively, in the (T, T ∗ , V )-space for n = 100. Note that P2,i can have unphysical (negative)
values.
Recall that there are two possibilities for P1 : unstable saddle point or stable node whereas for P2
there are three posibilities: unstable saddle, stable node or stable spiral point.
In Figures 4 and 5 we show some examples of distribution of types of critical points. In the given
examples, P1 is a saddle point in 99% cases and P2 is a stable spiral point in 93% cases.
We assume that the encounters between individuals is governed by the Poisson process
{N
p ij (t), t > 0}, i, j = 1, . . . , n with the rate parameter λij = Λ exp[−αdij ], where dij =
(Xi − Xj )2 + (Yi − Yj )2 is the distance between ith and jth hosts. Λ = 2 is the basic rate
of meetings per day, α = ln 100 is the decay of contact rate in space.
So, in the presence of interaction between hosts, we rewrite equations (7)-(9) in the following form:
dTi
= λi − di Ti − ki Ti Vi ,
dt
dTi∗
= ki Ti Vi − δi Ti∗ ,
dt
n
X
dV
∗
= πTi − ci Vi − ki Ti Vi +
Tji .
dt
(7)
(8)
(9)
j=1
Dynamics at the Horsetooth
3
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
Here Tji = βH(U (0, 1) − ptrans )H(Vj − Vcrit ) determines the transmission from the jth to the
ith individual if a meeting occurs between them. The standard values of the parameters involved:
transmitted viral load β = 1, threshold viral load for transmission Vcrit = 3, probability of transmission of virus on contact ptrans varies from 0.05 to 0.7, and U (0, 1) is a random variable uniformly
distributed on (0, 1). The form of H(x − y) is chosen to be a step function:
(
1, if x ≥ y
H(x − y) =
0, otherwise.
Note that Tii = 0 for all i.
To start, we assume all Ti (0) = 1 and Ti∗ (0) = 0. We choose randomly just one infected individual with a set of random dynamical parameters. Therefore, we have all Vi (0) = 0 except for
some j 6= i with 0 < Vj < Vinit (usually Vinit = 3).
Suppose the time interval of viral spread is (0, Tmax ] and time step is ∆t (usually ∆t = 1 day.) At
each time step, we define nxn matrix M such that
(
1, if individual i meets individual j,
Mij =
0, otherwise.
So, the value of Mij = 1 if a uniform on (0, 1) random number is less than λij ∆t. Note that M
is symmetric.
At each time step, we update the ith individual’s Vi , Ti , and Ti∗ values according to the following:
(
Ti (t),
if individual i has never been infected,
Ti (t + ∆t) =
Ti (t) + (λi − di Ti (t) − ki Ti (t)Vi (t))∆t, otherwise,
(
Ti∗ (t),
if individual i has never been infected,
Ti∗ (t + ∆t) =
∗
∗
T (t) + (ki Ti Vi (t) − δi Ti (t))∆t, otherwise,
( i
P
Vi (t) + (πTi∗ (T ) − ci Vi (T ) − ki Ti (T )Vi (T ))∆t,
if nj=1 Mji = 0,
Vi (t + ∆t) =
P
Vi (t) + (πTi∗ (T ) − ci Vi (T ) − ki Ti (T )Vi (T ))∆t + nj=1 Tji (t), otherwise.
3
Results
We did some numerical experiments varying time in days Tmax and dynamical parameters, see
examples in Figures 6-9 for Tmax = 40 and in Figures 10-11 for Tmax = 100.
For the future work, it is interesting to consider different values of probability of transmission
of virus on contact ptrans and population sizes.
Dynamics at the Horsetooth
4
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
1
0.5
V
0
−0.5
−1
1
0.5
40
30
0
20
−0.5
10
−1
T*
0
T
Figure 2: Positions of the critical poits P1,i according to the random distribution of the paramaters
described in Table 1, i = 1, . . . , 100.
2000
V
1500
1000
500
0
1.5
10
1
5
0.5
T*
0
0
T
Figure 3: Positions of the critical poits P2,i according to the random distribution of the paramaters
described in Table 1, i = 1, . . . , 100.
Dynamics at the Horsetooth
5
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
1.2
SADDLE
STABLE NODE
1
Frequency
0.8
0.6
0.4
0.2
0
1
2
Type of Critical Point
Figure 4: The numbers of each type of critical point for P1 .
1.2
SADDLE
STABLE NODE
STABLE FOCUS
1
2
Type of Critical Point
3
1
Frequency
0.8
0.6
0.4
0.2
0
Figure 5: The numbers of each type of critical point for P2 .
Dynamics at the Horsetooth
6
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
2000
1800
Mean Population Viral Load
1600
1400
1200
1000
800
600
400
200
0
0
5
10
15
20
Time in Days
25
30
35
40
Figure 6: Mean population viral load vs. time for population with size n = 100 and ptrans = 0.2.
5000
Initially infected individual
Individual infected later
4500
4000
Individual Viral Loads
3500
3000
2500
2000
1500
1000
500
0
0
5
10
15
20
Time in Days
25
30
35
40
Figure 7: Viral loads of two individuals vs. time.
100
90
Number of Sick INdividuals
80
70
60
50
40
30
20
10
0
0
5
10
15
20
Time in Days
25
30
35
40
Figure 8: Plots of numbers of individuals classified as sick with V > Vsick vs. time, Vsick =
5, ptrans = 0.2.
Dynamics at the Horsetooth
7
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
2000
1800
Mean Population Viral Load
1600
1400
1200
1000
800
600
400
200
0
0
10
20
30
40
50
60
Time in Days
70
80
90
100
Figure 9: Mean population viral load vs. time for population with size n = 100 and ptrans = 0.2.
2500
Initially infected individual
Individual infected later
Individual Viral Loads
2000
1500
1000
500
0
0
10
20
30
40
50
60
Time in Days
70
80
90
100
Figure 10: Viral loads of two individuals vs. time.
100
90
Number of Sick INdividuals
80
70
60
50
40
30
20
10
0
0
10
20
30
40
50
60
Time in Days
70
80
90
100
Figure 11: Plots of numbers of individuals classified as sick with V > Vsick vs. time, Vsick =
5, ptrans = 0.2.
Dynamics at the Horsetooth
8
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
Appendix: Matlab Code
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Routine p r o j e c t .m s o l v e s system o f n x 3 d i f f e r e n t i a l e q u a t i o n s
% which d e s c r i b e v i r a l s p r e a d i n t h e p o p u l t i o n o f d e n s i t y n
clear ;
% Random p o p u l a t i o n map n = 1 0 0 ;
X = rand ( n , 2 ) ;
figure ;
h o l d on ;
for i = 1:n
p l o t (X( i , 1 ) ,X( i , 2 ) , ’ bx ’ ) ;
end
axis ([0 1 0 1 ] ) ;
x l a b e l ( ’X ’ ) ; y l a b e l ( ’Y ’ ) ;
hold o f f ;
i n d i n f = randi (n ) ; % index of the i n f e c t e d i n d i v i d u a l
% P l o t t i n g t h e p o p u l a t i o n map
figure ();
h o l d on ;
f o r i =1:100
i f i ˜= i n d i n f
p l o t (X( i , 1 ) ,X( i , 2 ) , ’ kx ’ ) ;
else
p l o t (X( i n d i n f , 1 ) ,X( i n d i n f , 2 ) , ’ ro ’ ) ;
end
end
axis ([0 1 0 1 ] ) ;
x l a b e l ( ’X ’ ) ; y l a b e l ( ’Y ’ ) ;
hold o f f ;
% I n i n t i a l v a l u e s and p a r a m e t e r s
[ d , lambda , k , d e l t a , Pi , c ] = p a r a m e t e r s ( n ) ;
tmax = 4 0 ; % time i n days
T = o n e s ( n , tmax ) ;
TI = z e r o s ( n , tmax ) ;
V = z e r o s ( n , tmax ) ;
V( i n d i n f , 1 ) = 3∗ rand ; % i n f e c t e d i n d i v i d u a l i n i t i a l v i r a l l o a d
L = 2;
alpha = log ( 1 0 0 ) ;
beta = 1 ;
Vcrit = 3;
Dynamics at the Horsetooth
9
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
Vsick = 5 ;
ptrans = 0 . 2 ;
f o r t =1:tmax−1
% G e n e r a t i n g meeting matrix M
f o r i = 1 : n−1
f o r j = i +1:n
d i f f = X( i , : ) − X( j , : ) ;
% difference
dd ( i , j ) = s q r t ( d i f f ∗ d i f f ’ ) ; % d i s t a n c e
dd ( j , i ) = dd ( i , j ) ;
l ( i , j ) = L∗ exp(− a l p h a ∗dd ( i , j ) ) ;
l (j , i ) = l (i , j );
num = rand ;
i f num< l ( i , j )
M( i , j ) = 1 ;
else
M( i , j ) = 0 ;
end
M( j , i ) = M( i , j ) ;
end
end
f o r i =1:n
i f V( i , t )>10ˆ−8
T( i , t +1) = T( i , t )+lambda ( i )−d ( i ) ∗T( i , t )−k ( i ) ∗V( i , t ) ∗T( i , t ) ;
TI ( i , t +1) = TI ( i , t )+k ( i ) ∗V( i , t ) ∗T( i , t )− d e l t a ( i ) ∗ TI ( i , t ) ;
else
T( i , t +1) = T( i , t ) ;
TI ( i , t +1) = TI ( i , t ) ;
end
sumM = sum (M( i , : ) ) ;
i f sumM == 0
V( i , t +1) = V( i , t ) + Pi ( i ) ∗ TI ( i , t )−c ( i ) ∗V( i , t )−k ( i ) ∗T( i , t ) ∗V( i , t ) ;
else
VT = 0 ;
f o r m=1:n
i f V(m, t ) >= V c r i t
rand num = rand ;
i f rand num >= p t r a n s
VT = VT + b e t a ;
end
end
end
V( i , t +1) = V( i , t ) + Pi ( i ) ∗ TI ( i , t )−c ( i ) ∗V( i , t )−k ( i ) ∗T( i , t ) ∗V( i , t )+VT;
end
i f V( i , t +1)<0
V( i , t +1)=0;
Dynamics at the Horsetooth
10
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
end
end
end
f o r i =1:tmax
V i r a l L o a d ( i ) = mean (V( : , i ) ) ;
end
% P l o t t i n g Mean P o p u l a t i o n V i r a l Load
figure ();
h o l d on ;
p l o t ( 1 : 1 : tmax , ViralLoad , ’ b− ’)
x l a b e l ( ’ Time i n Days ’ ) ;
y l a b e l ( ’ Mean P o p u l a t i o n V i r a l Load ’ ) ;
hold o f f ;
% PLotting v i r a l l o a d s o f t h e i n i t i a l l y i n f e c t e d and a randomly c h o s e n
% individuals
i n d e x=r a n d i ( n ) ;
figure ();
h o l d on ;
p l o t ( 1 : 1 : tmax ,V( i n d i n f , : ) , ’ b − . ’ , 1 : 1 : tmax ,V( index , : ) , ’ m− ’)
x l a b e l ( ’ Time i n Days ’ ) ;
y l a b e l ( ’ I n d i v i d u a l V i r a l Loads ’ ) ;
legend ( ’ I n i t i a l l y i n f e c t e d individual ’ , ’ Individual i n fe c t e d later ’ , 1 ) ;
hold o f f ;
% P l o t t i n g number o f s i c k i n d i v i d u a l s
sumsick = [ ] ;
f o r i =1:tmax
i n d s i c k = f i n d (V( : , i )> V s i c k ) ;
sumsick = [ sumsick l e n g t h ( i n d s i c k ) ] ;
end
figure ();
h o l d on ;
p l o t ( 1 : 1 : tmax , sumsick , ’ g − ’)
x l a b e l ( ’ Time i n Days ’ ) ;
y l a b e l ( ’ Number o f S i c k I N d i v i d u a l s ’ ) ;
hold o f f ;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Routine p a r a m e t e r s .m g e n e r a t e s h o s t v i r a l dynamical p a r a m e t e r s
% f o r each i n d i v i d u a l i n t h e p o p u l a t i o n u s i n g 10 p a t i e n t s data
% from t h e paper S t a f f o r d e t . a l ( 2 0 0 0 )
f u n c t i o n [ d , lambda , k , d e l t a , Pi , c ] = p a r a m e t e r s ( n ) ;
Dynamics at the Horsetooth
11
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
% S t a f f o r d parameter d (TW mu)
meand = . 0 1 0 8 9 ; s t d e v d = 0 . 0 0 5 7 2 7 ;
f o r i =1:n
d ( i )= tuck ( [ meand s t d e v d 0 . 0 0 4 3 0 . 0 2 ] ) ;
end
% S t a f f o r d parameter lambda (TW s )
meanlambda = . 1 0 8 9 ; stdevlambda = 0 . 0 5 7 2 7 ;
f o r i =1:n
lambda ( i )= tuck ( [ meanlambda stdevlambda 0 . 0 4 3 0 . 2 ] ) ;
end
% S t a f f o r d parameter k (TW k )
meank = 0 . 0 0 1 1 7 9 ; s t d e v k = 0 . 0 0 1 4 8 2 ;
f o r i =1:n
k ( i )= tuck ( [ meank s t d e v k 0 . 0 0 0 1 9 0 . 0 0 4 8 ] ) ;
end
%S t a f f o r d parameter d e l t a (TW a )
meandelta = . 3 6 6 0 ; s t d e v d e l t a = 0 . 1 9 3 ;
f o r i =1:n
d e l t a ( i )= tuck ( [ meandelta s t d e v d e l t a 0 . 1 3 0 . 8 ] ) ;
end
%S t a f f o r d parameter p i (TW c )
meanpi =1427; s t d e v p i =2049;
f o r i =1:n
Pi ( i )= tuck ( [ meanpi s t d e v p i 98
end
7100]);
% S t a f f o r d parameter c (TW gamma)
meanc=3; s t d e v c =0;
f o r i =1:n
c ( i )= tuck ( [ meanc s t d e v c 0 4 ] ) ;
end
% System has two f i x e d p o i n t s P1 and P2
% Fixed p o i n t P1 :
prob = 0 ;
f o r j =1:n
z ( j )= ( Pi ( j )− d e l t a ( j ) ) ∗ k ( j ) ∗ lambda ( j ) / ( d ( j ) ∗ d e l t a ( j ) ∗ c ( j ) ) ;
if z( j ) > 1
prob = prob +1;
end
end
Dynamics at the Horsetooth
12
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
figure ();
probP1sadd = prob /n
probP1node = 1−probP1sadd
x = [ probP1sadd probP1node ] ;
xd={’SADDLE’ , ’STABLE NODE’ } ;
nx=numel ( x ) ;
bar ( x , ’ g ’ ) ;
s e t ( gca , ’ ylim ’ , [ 0 , 1 . 2 ] ) %’ x t i c k l a b e l ’ , xd ) ;
t e x t ( 1 : nx , repmat ( 1 . 1 , 1 , nx ) , xd , . . .
’ horizontalalignment ’ , ’ center ’ , . . .
’ fontsize ’ , 1 2 , . . .
’ f o n t w e i g h t ’ , ’ bold ’ ) ;
x l a b e l ( ’ Type o f C r i t i c a l Point ’ ) ; y l a b e l ( ’ Frequency ’ )
% P l o t t i n g p o s i t i o n s o f P1 f o r each i n d i v i d u a l i n t h e p o p u l a t i o n
f o r i =1:n
x1 ( i ) = lambda ( i ) / d ( i ) ;
end
figure ();
p l o t 3 ( x1 , 0 , 0 , ’ b ∗ ’ ) ;
g r i d on
axis square
x l a b e l ( ’T ’ ) ; y l a b e l ( ’T∗ ’ ) ; z l a b e l ( ’V ’ ) ;
% Fixed p o i n t P2 :
f o r j =1:n
x2 ( j ) = c ( j ) ∗ d e l t a ( j ) / ( k ( j ) ∗ ( Pi ( j )− d e l t a ( j ) ) ) ;
y2 ( j ) = lambda ( j ) / d e l t a ( j )−d ( j ) ∗ c ( j ) / ( k ( j ) ∗ ( Pi ( j )− d e l t a ( j ) ) ) ;
z2 ( j ) = lambda ( j ) ∗ ( Pi ( j )− d e l t a ( j ) ) / ( c ( j ) ∗ d e l t a ( j ))−d ( j ) / k ( j ) ;
sigma ( j ) = d e l t a ( j )+c ( j )+d ( j )+k ( j ) ∗ ( x2 ( j )+z ( 2 ) ) ;
d l ( j )= ( d e l t a ( j )+c ( j ) ) ∗ ( d ( j )+k ( j ) ∗ z2 ( j ))+d ( j ) ∗ k ( j ) ∗ x2 ( j ) ;
e p s ( j )= d e l t a ( j ) ∗ c ( j ) ∗ k ( j ) ∗ z2 ( j ) ;
y=[1 sigma ( j ) d l ( j ) e p s ( j ) ] ;
p=r o o t s ( y ) ;
pp ( j )=p ( 1 ) ; qq ( j )=p ( 2 ) ; r r ( j )=p ( 3 ) ;
end
ssadd = 0 ; snode = 0 ; s f o c u s = 0 ;
for m = 1:n
i f ( r e a l ( pp (m)) <0) && ( r e a l ( qq (m)) <0) && ( r e a l ( r r (m)) <0)
i f ( imag ( pp (m) ) == 0 ) && ( imag ( qq (m) ) == 0 )
snode = snode +1;
else
s f o c u s = s f o c u s +1;
end
else
ssadd = ssadd +1;
Dynamics at the Horsetooth
13
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
end
end
% V e r i f y i n g t h a t sigma ∗ dl−e p s > 0 f o r any i n d i v i d u a l
f o r j j =1:n ;
hh ( j j ) = sigma ( j j ) ∗ d l ( j j )− e p s ( j j ) ;
end
i n d n e g = f i n d ( hh <= 0 )
i p =0;
f o r mm=1:n ;
i f ( r e a l ( qq (mm))− r e a l ( r r (mm) ) ) == 0
i p=i p +1;
end
end
ip
probP2sadd = ssadd /n
probP2node = snode /n
p r o b P 2 f o c u s = s f o c u s /n
probP2 = probP2sadd+probP2node+p r o b P 2 f o c u s
figure ();
xx = [ probP2sadd probP2node p r o b P 2 f o c u s ] ;
xxd={’SADDLE’ , ’STABLE NODE’ , ’STABLE FOCUS’ } ;
nxx=numel ( xx ) ;
bar ( xx , ’ g ’ ) ;
s e t ( gca , ’ ylim ’ , [ 0 , 1 . 2 ] ) ;
t e x t ( 1 : nxx , repmat ( 1 . 1 , 1 , nxx ) , xxd , . . .
’ horizontalalignment ’ , ’ center ’ , . . .
’ fontsize ’ , 1 2 , . . .
’ f o n t w e i g h t ’ , ’ bold ’ ) ;
x l a b e l ( ’ Type o f C r i t i c a l Point ’ ) ; y l a b e l ( ’ Frequency ’ )
% P l o t t i n g p o s i t i o n s o f P2 f o r each i n d i v i d u a l i n t h e p o p u l a t i o n
figure ();
p l o t 3 ( x2 , y2 , z2 , ’ b ∗ ’ ) ;
g r i d on
axis square
x l a b e l ( ’T ’ ) ; y l a b e l ( ’T∗ ’ ) ; z l a b e l ( ’V ’ ) ;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Parameter c a l c u l a t i o n based on normal d i s t r i b u t i o n
f u n c t i o n [ u]= tuck ( x ) ;
mu = x ( 1 ) ;
sigma = x ( 2 ) ;
Dynamics at the Horsetooth
14
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
min = x ( 3 ) ;
max = x ( 4 ) ;
R=rand ;
u = −sigma ∗ s q r t ( 2 ) ∗ e r f c i n v (R∗ ( e r f c ( (mu−max ) / ( sigma ∗ s q r t ( 2 ) ) ) − . . .
e r f c ( (mu−min ) / ( sigma ∗ s q r t ( 2 ) ) ) ) + e r f c ( (mu−min ) / ( sigma ∗ s q r t ( 2 ) ) ) ) +mu;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
Dynamics at the Horsetooth
15
Vol. 2, 2010
Dynamical Modeling of Viral Spread
Sofya Chepushtanova
References
[1] Stafford, M.A., Corey, L. & Cao, Y. et al., 2000 Modeling plasma virus concentration during
primary HIV infection J. Theor. Biol. 203, 285-301.
[2] Tuckwell, H.C., Toubiana, L., 2007 Dynamical modeling of viral spread in spatially distributed
populations: stochastic origins of oscillations and density dependence Biosystems 90 (2), 546559.
[3] Tuckwell, H.C., Wan, F.Y.M., 2000 Nature of equilibria and effects of drug treatments in some
simple viral population dynamical models IMA J. Math. Appl. Med. Biol. 17, 311-327.
Dynamics at the Horsetooth
16
Vol. 2, 2010