PENALTY-FACTOR-FREE DISCONTINUOUS GALERKIN METHODS FOR 2-DIM STOKES PROBLEMS
advertisement

SIAM J. NUMER. ANAL.
Vol. 49, No. 5, pp. 2165–2181
c 2011 Society for Industrial and Applied Mathematics
PENALTY-FACTOR-FREE DISCONTINUOUS GALERKIN
METHODS FOR 2-DIM STOKES PROBLEMS∗
JIANGGUO LIU†
Abstract. This paper presents two new finite element methods for two-dimensional Stokes
problems. These methods are developed by relaxing the constraints of the Crouzeix–Raviart nonconforming P1 finite elements. Penalty terms are introduced to compensate for lack of continuity or
the divergence-free property. However, there is no need for choosing penalty factors, and the formulations are symmetric. These new methods are easy to implement and avoid solving saddle-point
linear systems. Numerical experiments are presented to illustrate the proved optimal error estimates.
Key words. discontinuous Galerkin (DG) methods, divergence residuals, flux jumps, locally
divergence-free (LDF), nonconforming finite elements, Stokes problems, weak over penalization
AMS subject classifications. 65N30, 76D07
DOI. 10.1137/10079094X
1. Introduction. In this paper, we consider two-dimensional Stokes problems
in the velocity-pressure formulation
⎧
⎪
⎨−μΔu + ∇p = f in Ω,
∇ · u = 0 in Ω,
(1)
⎪
⎩
u|∂Ω = g,
where Ω ⊂ R2 is a polygonal domain, u the fluid velocity, p the pressure, f an
external
body force, g a boundary condition that satisfies the compatibility condition
g
·
ndγ
= 0, n the unit outward normal vector on the domain boundary ∂Ω, and
∂Ω
μ > 0 the kinematic viscosity.
Stokes problems arise from approximations of low-Reynolds-number flows and
time discretizations of the Navier–Stokes equation. A major difficulty in finite element methods for Stokes and Navier–Stokes problems is enforcing the divergence-free
property in finite element spaces. Conforming mixed finite element methods have to
satisfy the inf-sup (LBB) condition to be numerically stable [14, 16]. The numerical
velocities are discretely divergence-free [16, 23], but not exactly divergence-free inside
elements.
The classical Crouzeix–Raviart nonconforming P1 finite elements [8, 12] are pointwise divergence-free inside each element and continuous at edge midpoints. In other
words, shape functions have jumps across element interfaces, but the average of the
jump on each edge is zero. Constructing global basis functions for the Crouzeix–
Raviart elements is nontrivial, especially for multiply connected domains [3, 13, 22].
On the other hand, the locally divergence-free (LDF) finite elements [1] are easy to
construct and pointwise divergence-free inside each element, but totally discontinuous
across element interfaces. When applied to the Stokes and Navier–Stokes equations,
the LDF elements are stable under certain conditions, although numerical results in
∗ Received
by the editors April 1, 2010; accepted for publication (in revised form) August 12,
2011; published electronically October 20, 2011. This work was partially supported by the National
Science Foundation under grant DMS-09-15253.
http://www.siam.org/journals/sinum/49-5/79094.html
† Department of Mathematics, Colorado State University, Fort Collins, CO 80523-1874 (liu@math.
colostate.edu).
2165
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2166
JIANGGUO LIU
[17, 18] indicate that these conditions are not critical. Other recent developments in
numerical methods for Stokes problems are the local discontinuous Galerkin methods
[11], the hybridization techniques [10], and the H(div) finite elements [23].
It is noticeable that the Crouzeix–Raviart P1 elements and the degree one LDF
elements have been unified in a general framework of nonconforming finite element
methods and utilized in a series of work [2, 3, 4, 5] for solving 2-dim curl-curl and
Maxwell problems. The numerical results for Maxwell eigenvalue problems [5] have
demonstrated the strong potential of this new approach.
In this paper, we follow the methodology in [4, 5] to develop new finite element
methods for Stokes problems through relaxing the constraints of the Crouzeix–Raviart
elements. We take the same approach as in [23] by avoiding saddle-point problems
and hence the inf-sup condition, since these methods solve for the velocity only.
Throughout the paper, we follow the standard definitions for Lebesgue and Sobolev
spaces: L2 (Ω), H 1 (Ω), H01 (Ω), L2 (Ω) := L2 (Ω)2 , H10 (Ω) := H01 (Ω)2 , and (·, ·) for inner
products in the corresponding spaces. Gradient, divergence, and Laplacian operators
∇, ∇·, Δ all follow the standard definitions. We define
H(div0 ; Ω) = {v ∈ L2 (Ω) : ∇ · v = 0}.
The following regularity results [14] will be used in our error analysis.
Theorem 1.1 (regularity). For a convex polygonal domain Ω, if f ∈ L2 (Ω)
3
and g ∈ H 2 (∂Ω), then the Stokes problem (1) has a unique solution u ∈ H2 (Ω),
1
p ∈ H (Ω)/R, which satisfies
(2)
uH2 (Ω) + pH 1 (Ω) ≤ C(f L2 (Ω) + g
3
H 2 (∂Ω)
),
where C is a positive constant independent of f and g.
For ease of presentation, we assume that Ω is a convex polygon, and that μ
is absorbed into other terms, and consider first the homogeneous Dirichlet (no-slip)
boundary condition:
⎧
⎪
⎨−Δu + ∇p = f in Ω,
∇ · u = 0 in Ω,
(3)
⎪
⎩
u|∂Ω = 0.
Then we extend discussions to nonhomogenous Dirichlet boundary conditions. We
also concentrate on solving the velocity. Procedures for recovering pressure from a
computed velocity can be established in a similar way to that used in [15].
The variational (weak) formulation for (3) on V := H10 (Ω) ∩ H(div0 , Ω) reads as:
Seek u ∈ V such that
(4)
(∇u, ∇v) = (f , v)
∀v ∈ V.
However, it is known that conforming finite element subspaces of V are difficult to
construct [13].
In this paper, we instead develop nonconforming finite element methods for (4)
through relaxing the constraints on the Crouzeix–Raviart elements and weakly overpenalizing nonconformity. In Scheme II, we maintain edge midpoint continuity and
penalize local divergence residuals. In Scheme III, we maintain the local divergencefree property and penalize discontinuity across edges. For the P1 shape functions in
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
PENALTY-FACTOR-FREE METHODS FOR STOKES PROBLEMS
2167
both schemes (II and III), we could control across-edge jumps by the piecewise H 1 seminorm (Lemmas 3.4(iii) and 3.10). Therefore, we could derive optimal first order
error estimates in a mesh-dependent h-norm (Theorems 3.1 and 3.2). By duality
arguments, we derive also optimal second order estimates in the L2 -norm. The weak
overpenalization also benefits us with second order convergence in either the total
divergence residual (Theorem 3.2) or the total normal flux jump (Theorem 3.1).
The rest of this paper is organized as follows. Section 2 develops two discontinuous
Galerkin (DG) finite element methods for 2-dim Stokes problems by relaxing the
constraints in the Crouzeix–Raviart elements. Error estimates of these new methods
are presented in section 3. Section 4 presents numerical experiments that illustrate
the proved optimal error estimates. Section 5 concludes the paper with some remarks.
2. DG methods for Stokes velocity. In this section, we develop new finite
element schemes for solving the velocity in two-dimensional Stokes problems after introducing some notation. We first develop numerical schemes for the no-slip boundary
condition, then discuss how to handle nonhomogenous Dirichlet boundary conditions.
Let Th be a family of quasi-uniform triangulations on Ω, Γh the set of all element
interfaces (edges), Γih the set of all interior edges, and Γbh the set of the edges on the
domain boundary ∂Ω. Let γ ∈ Γih be an interior edge shared by two elements E1 and
E2 with unit outward normals n1 and n2 , respectively. For a piecewise vector field v
on Th , we define its jumps across edge γ as
[v · n] = (v|E1 )|γ · n1 + (v|E2 )|γ · n2 ,
(5)
[v ⊗ n] = (v|E1 )|γ ⊗ n1 + (v|E2 )|γ ⊗ n2 .
For a boundary edge γ, we define
[v · n] = (v|E )|γ · n,
(6)
[v ⊗ n] = (v|E )|γ ⊗ n,
where n is the unit outward normal on the domain boundary. Piecewise gradient and
divergence operators on Th are defined as
(∇h v)|E = ∇(v|E ),
(7)
(∇h · v)|E = ∇ · (v|E ).
Subspace Uh (CRP1). The classical Crouzeix–Raviart nonconforming LDF
weakly continuous P1 finite element subspace (CRP1) is defined as
⎫
⎧
v|T ∈ P1 (T )2 , ∇ · (v|T ) = 0 ∀T ∈ Th ;
⎬
⎨
Uh = v ∈ L2 (Ω) : v continuous at interior edge midpoints of Γih ; .
(8)
⎭
⎩
v = 0 at boundary edge midpoints of Γbh
Scheme I (CRP1). The numerical scheme based on the Crouzeix–Raviart P1
elements is: Seek uh ∈ Uh such that
Ah (uh , v) = (f , v)
(9)
∀v ∈ Uh ,
where
(10)
Ah (u, v) := (∇h u, ∇h v)L2 (Ω) :=
(∇u, ∇v)L2 (T ) .
T ∈Th
Constructing a global basis for the Crouzeix–Raviart P1 elements is nontrivial.
For a simply connected domain, this can be accomplished by using two types of
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2168
JIANGGUO LIU
local basis functions: the vector fields tangential to the edges in a mesh and those
representing rotations around the interior nodes. More details on such a construction
can be found in [13, 22]. The number of unknowns in the discrete problem (9) is
about the number of the interior edges plus the number of the interior nodes.
The weakly continuous P1 finite
Subspace Vh (weakly continuous P1 ).
element subspace is defined as
⎧
⎫
v|T ∈ P1 (T )2 ∀T ∈ Th ;
⎨
⎬
(11) Vh = v ∈ L2 (Ω) : v continuous at interior edge midpoints of Γih ; .
⎩
⎭
v = 0 at boundary edge midpoints of Γbh
Scheme II (local divergence penalty).
Ah (uh , v) = (f , v)
(12)
Seek uh ∈ Vh such that
∀v ∈ Vh ,
where
Ah (u, v) := (∇h u, ∇h v)L2 (Ω) + h−2 (∇h · u, ∇h · v)L2 (Ω) .
(13)
Here the second term penalizes the nonzero local divergence of shape functions, since
Vh is not a subspace of H(div0 , Ω).
Global basis functions for the weakly continuous P1 finite elements can be easily
constructed by gluing local basis functions, which, in turn, are constructed using edge
geometric information and the scalar Lagrangian basis functions at edge midpoints.
To be specific, let T ∈ Th and γi (i = 1, 2, 3) be the three edges of T with midpoints
mi . Denote by φi (i = 1, 2, 3) the Lagrangian linear polynomials at mi . Then the
vector local basis functions are
φi nγi , φi tγi ,
i = 1, 2, 3,
where nγi , tγi are respectively a unit normal vector and a unit tangential vector on
edge γi . Actually φi tγi (i = 1, 2, 3) are divergence-free pointwise inside element T by
the divergence theorem. The number of unknowns in the discrete linear system (12)
is two times the number of the interior edges.
Subspace Wh (LDF P1 ). The LDF finite element subspace is defined as
(14)
Wh = v ∈ L2 (Ω) : v|T ∈ P1 (T )2 , ∇ · (v|T ) = 0 ∀T ∈ Th .
Scheme III (DG-LDF). The numerical scheme using the LDF P1 finite elements in the DG framework is: Seek uh ∈ Wh such that
Ah (uh , v) = (f , v)
(15)
where
Ah (u, v) := (∇h u, ∇h v)L2 (Ω) + h−2
(16)
+ h−2
∀v ∈ Wh ,
(Π0γ [u · n])(Π0γ [v · n])
γ∈Γh
(Π0γ [u ⊗ n]) : (Π0γ [v ⊗ n]).
γ∈Γh
Here Π0γ is the L2 -projection onto the piecewise constant space on γ, and : is the colon
product. Actually Π0γ [u · n] is the value of [u · n] at the edge midpoint, since [u · n] is
linear on γ. A similar fact holds for Π0γ [u ⊗ n].
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
PENALTY-FACTOR-FREE METHODS FOR STOKES PROBLEMS
2169
Some remarks follow.
(i) The second term above penalizes the normal flux jumps on all edges, since
the shape functions are not H(div)-conforming.
(ii) The third term penalizes the nonconformity Wh H1 (Ω), that is, discontinuity of the shape functions across edges.
(iii) In [5], the normal and tangential jumps [v · n], [v × n] are penalized, since
they represent respectively the nonconformity to H(div) and H(curl). Here
we have instead H1 -nonconformity reflected by the jump term [v ⊗ n].
One of the main advantages of the LDF elements is that the shape functions are
independent of element geometry [1]. But to maintain numerical stability, we adopt
normalized shape functions [20]. The normalized LDF basis functions of degree at
most one are
1
0
0
Y
X
(17)
,
,
,
,
,
0
1
X
0
−Y
where (xc , yc ) is the element center, A the element area, and
√
√
X = (x − xc )/ A,
(18)
Y = (y − yc )/ A.
The degree of freedom in the discrete system (15) is five times the number of elements
in the mesh.
As a classical method for Stokes problems, Scheme I has been thoroughly studied,
and it also motivated many other numerical methods. But constructing the basis
functions for Scheme I could be very technical, e.g., for multiply connected domains
[3, 13, 22]. Schemes II and III extend Scheme I in two different aspects by relaxing the
LDF property or the edge midpoint continuity. The relationships Uh ⊂ Vh , Uh ⊂ Wh
are trivial but helpful for error analysis.
For convenience of analysis, we define a unified bilinear form for all three formulations: for any u, v ∈ V + Uh , V + Vh or V + Wh ,
(19)
Ah (u, v) := (∇h u, ∇h v)L2 (Ω) + h−2 (∇h · u, ∇h · v)L2 (Ω)
+ h−2
(Π0γ [u · n])(Π0γ [v · n])
γ∈Γh
+ h−2
(Π0γ [u ⊗ n]) : (Π0γ [v ⊗ n]).
γ∈Γh
We define a unified mesh-dependent norm for any v ∈ V + Uh , V + Vh , or V + Wh :
(20)
v2h := (∇h v, ∇h v)L2 (Ω) + h−2 (∇h · v, ∇h · v)L2 (Ω)
+ h−2
(Π0γ [v · n])(Π0γ [v · n])
γ∈Γh
+h
−2
(Π0γ [v ⊗ n]) : (Π0γ [v ⊗ n]).
γ∈Γh
Note that for shape functions in Wh , the second term disappears due to the locally
divergence-free property; for Vh , the third and fourth terms vanish due to the edge
midpoint continuity; for Uh , the second through fourth terms all disappear. Accordingly, a unified finite element scheme is formulated as: Seek uh ∈ Uh , Vh , or Wh such
that for any v in the same discrete space,
(21)
Ah (uh , v) = (f , v).
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2170
JIANGGUO LIU
The bilinear form in (19) is symmetric positive-definite on the space V +Uh , V +Vh ,
or V + Wh . Lemma 2.1 can be easily proved.
Lemma 2.1. The following hold for u, v ∈ V + Uh , V + Vh , or V + Wh :
(i) boundedness:
|Ah (u, v)| ≤ uh vh .
(22)
(ii) coercivity:
Ah (v, v) = v2h .
(23)
Therefore, the discrete problem (21) is uniquely solvable.
Scheme II can be readily revised to handle a nonhomogenous Dirichlet boundary
condition u|∂Ω = g. This can be implemented through modifying the discrete linear
system obtained from (12). For any γ ∈ Γbh , let hγ be its length. We replace the two
terms in the right-hand side of the discrete linear system that correspond to this edge
by
1
1
g · ndγ,
g · tdγ,
hγ γ
hγ γ
where n is the unit outward normal vector on γ ∈ Γbh and t is the unit tangential
vector obtained by a counterclockwise rotation of n.
For Scheme III with the LDF subspace Wh , rather than imposing boundary conditions in the strong sense, we adopt the approach in [21] to enforce boundary conditions
weakly. That is, we consider two boundary terms for u, v ∈ Wh :
h−2
(Π0γ [(u − g) · n])(Π0γ [v · n]) + h−2
(Π0γ [(u − g) ⊗ n]) : (Π0γ [v ⊗ n]).
γ∈Γbh
γ∈Γbh
Then Scheme III, i.e., (15), is revised to: Seek uh ∈ Wh such that
Ah (uh , v) = Fh (v)
∀v ∈ Wh ,
where
Fh (v) := (f , v)L2 (Ω) + h−2
(24)
+h
−2
(Π0γ [g
(Π0γ [g · n])(Π0γ [v · n])
γ∈Γbh
⊗ n]) : (Π0γ [v ⊗ n]).
γ∈Γbh
3. Error estimates. From now on, we use C (with or without subscript) for a
generic constant that is independent of the mesh size h. By A B, we mean A ≤ CB.
3.1. Properties of the interpolation operator Πh . The weak interpolation
operator Πh [5, 12, 13] from H10 (Ω) ∩ H(div0 , Ω) to the subspace Uh characterizes
approximating capacity of the nonconforming finite element subspace and hence plays
an important role in error analysis. Here we briefly recap its definition and important
properties.
Let T ∈ Th be a triangular element with edge midpoints mi (i = 1, 2, 3), v be a
vector field on T , and s ∈ ( 12 , 2]. Then by the trace theorem [7], v ∈ L2 (γi ) for all
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
PENALTY-FACTOR-FREE METHODS FOR STOKES PROBLEMS
2171
edges γi (i = 1, 2, 3) of T . So we can define
ΠT : H s (T )2 −→ P1 (T )2 ,
1
(ΠT v)(mi ) =
vdγ, i = 1, 2, 3.
h γi γi
(25)
The following approximation property holds for any s ∈ ( 12 , 2] and v ∈ H s (T ):
min(s,1)
v − ΠT vL2 (T ) + hT
(26)
|v − ΠT v|Hmin(s,1) (T ) hsT |v|Hs (T ) .
We define
(27)
Πh : H s (Ω)2 −→ Vh ,
(Πh v)|T := ΠT (v|T ).
For later analysis, we define Π0h as the L2 -orthogonal projection from H 1 (Ω)2×2
to the space of piecewise constant matrices on Th . It can be verified that
∇h (Πh v) = Π0h (∇v).
(28)
Lemma 3.1. Let u ∈ H2 (Ω) ∩ H10 (Ω) ∩ H(div0 , Ω) be the solution of (3), and
Πh u be the interpolant defined in (27). Then
u − Πh uL2 (Ω) h2 f L2 (Ω) ,
(29)
(30)
(31)
∇h (u − Πh u)L2 (Ω) hf L2 (Ω) ,
inf u − vh ≤ u − Πh uh hf L2 (Ω) .
v∈Uh
Proof. The first estimate is obtained by applying the elementwise approximation
property (26) and the regularity result in Theorem 1.1:
u − Πh u2L2 (Ω) =
u − Πh u2L2 (T )
T ∈Th
≤C
h4T |u|2H2 (T ) ≤ Ch4 |u|2H2 (Ω) h4 f 2L2 (Ω) .
T ∈Th
The second estimate can be deduced from a standard interpolation error estimate
[5, 7, 13], Theorem 1.1, and (28):
∇h (u − Πh u)2L2 (Ω) = ∇h u − Π0h (∇h u)2L2 (Ω) h2 ∇h u2H1 (Ω) h2 f 2L2 (Ω) .
The third estimate follows from Πh u ∈ Uh , ∇h · (u − Πh u) = 0, and
Π0γ [(u − Πh u) · n] = 0,
Π0γ [(u − Πh u) ⊗ n] = 0,
the · h norm defined in (20), and the second estimate.
3.2. Error estimates for the DG-LDF scheme. In this subsection, we present
error estimates for Scheme III, following the general framework in [7] on error estimation of nonconforming finite element methods. We identify two error sources in
Lemma 3.2: the approximating capacity of the nonconforming finite element space
(the first term on the right-hand side) and the consistency error (the second term).
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2172
JIANGGUO LIU
Lemma 3.2. Let u ∈ H10 (Ω) ∩ H(div0 ; Ω) be the solution of (4), and uh ∈ Wh be
the solution of (15). Then
u − uh h inf u − vh +
(32)
v∈Wh
sup
0=w∈Wh
Ah (u − uh , w)
.
wh
Proof. For any v ∈ Wh we have
u − uh h ≤ u − vh + v − uh h .
By the definition and boundedness of Ah , we have
v − uh 2h = Ah (v − uh , v − uh ) = Ah (v − u, v − uh ) + Ah (u − uh , v − uh )
v − uh v − uh h + Ah (u − uh , v − uh ).
When v − uh = 0, we have
v − uh h v − uh +
Ah (u − uh , v − uh )
Ah (u − uh , w)
v − uh + sup
.
v − uh h
wh
0=w∈Wh
Combining these estimates yields the desired result.
Lemma 3.3. Under the assumption in Lemma 3.1, the following holds:
inf u − vh ≤ u − Πh uh hf L2 (Ω) .
(33)
v∈Wh
Proof. This follows immediately from the fact that Uh ⊂ Wh .
Prior to analysis on the consistency error, we cite and extend some elementary
estimates in [5, 7] about constant and linear functions.
Lemma 3.4. Let γ ∈ Γh be an edge, Tγ be a triangle with γ as its edge, and
Tγ ⊂ Th be the set of (at most two) triangles that share the edge γ.
(i) For a constant scalar function q on Tγ , the following holds with C being a
constant depending only on the shape regularity of Tγ :
hγ q2L2 (γ) ≤ Cq2L2 (Tγ ) .
(34)
A similar estimate holds for a constant 2 × 2 matrix function.
(ii) For any φ ∈ H 1 (Ω), let φTγ be its average on Tγ ; then
(35)
hγ φ − φTγ 2L2 (γ) h2 |φ|2H 1 (Ω) .
γ∈Γh
A similar estimate holds for a matrix function in H 1 (Ω)2×2 .
(iii) Let w ∈ Wh . Then
0
2
h−1
(36)
|w|2H1 (T ) ,
γ [w · n] − Πγ [w · n]L2 (γ) T ∈Tγ
(37)
h−1
γ [w
⊗ n] −
Π0γ [w
⊗
n]2L2 (γ)
|w|2H1 (T ) .
T ∈Tγ
Proof. A simple calculation produces (i). A proof of (ii) is in [5]. One can prove
(iii) by direction calculations and the facts that w is piecewise linear and Π0γ [w · n],
Π0γ [w ⊗ n] are the averages of [w · n], [w ⊗ n] on the edge.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
PENALTY-FACTOR-FREE METHODS FOR STOKES PROBLEMS
2173
Remark. The two estimates in Lemma 3.4(iii) indicate that the piecewise H 1 norm can be utilized to bound the interelement jumps of piecewise linear functions,
while the H(curl), H(div) norms are too weak for such a control [2].
Lemma 3.5. For any φ ∈ H 1 (Ω), w ∈ Wh , the following holds:
hφH 1 (Ω) wh .
(38)
φ[w
·
n]dγ
γ∈Γh γ
Proof. Utilizing averages, we have
φ[w · n]dγ =
(φ − φTγ )([w · n] − Π0γ [w · n])dγ
γ∈Γh γ
γ∈Γh γ
+
(φ − φTγ )(Π0γ [w · n])dγ +
φTγ (Π0γ [w · n])dγ
γ∈Γh
γ
γ∈Γh
γ
=: A1 + A2 + A3 .
For term A1 , we apply the Cauchy–Schwarz inequality and Lemma 3.4(ii)–(iii) to
obtain
⎞ 12 ⎛
⎞ 12
⎛
0
2
⎠
hγ φ − φTγ 2L2 (γ) ⎠ ⎝
h−1
|A1 | ≤ ⎝
γ [w · n] − Πγ [w · n]L2 (γ)
γ∈Γh
h|φ|H 1 (Ω)
γ∈Γh
12
|w|2H1 (T )
hφH 1 (Ω) wh .
T ∈Th
For term A2 , applying Lemma 3.4(ii) again leads to
1
φ − φTγ L2 (γ) Π0γ [w · n]L2 (γ) =
hγ2 φ − φTγ L2 (γ) |Π0γ [w · n]|
|A2 | ≤
γ∈Γh
⎛
⎞ 12 ⎛
⎝
hγ φ − φTγ 2L2 (γ) ⎠ ⎝
γ∈Γh
⎛
h⎝
γ∈Γh
(Π0γ [w · n])2 ⎠
γ∈Γh
⎞ 12
⎞ 12 ⎛
hγ φ − φTγ 2L2 (γ) ⎠ ⎝h−2
γ∈Γh
⎞ 12
(Π0γ [w · n])2 ⎠
γ∈Γh
2
h |φ|H 1 (Ω) wh hφH 1 (Ω) wh ,
2
since h ≤ diam(Ω)h. For A3 , we have an estimate based on Lemma 3.4(i):
1
−1
|A3 | ≤
hγ2 φTγ L2 (γ) hγ 2 Π0γ [w · n]L2 (γ)
γ∈Γh
⎛
h⎝
⎛
h⎝
γ∈Γh
γ∈Γh
⎞ 12 ⎛
hγ φTγ 2L2 (γ) ⎠ ⎝h−2
⎞ 12
⎞ 12
(Π0γ [w · n])2 ⎠
γ∈Γh
φTγ 2L2 (Tγ ) ⎠ wh hφL2 (Ω) wh hφH 1 (Ω) wh .
Combining the above three estimates yields the desired result.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2174
JIANGGUO LIU
Lemma 3.6. Let u ∈ H2 (Ω) ∩ H10 (Ω) ∩ H(div0 ; Ω), p ∈ H 1 (Ω) be the solutions of
(3), and uh ∈ Wh be the solution of (15). Then we have
(39)
sup
0=w∈Wh
Ah (u − uh , w)
hf L2 (Ω) .
wh
Proof. For any w ∈ Wh , integration by parts combined with the fact ∇h · w = 0
yields
Ah (u − uh , w) =
(−Δu, w)L2 (T ) +
(∇u) : (w ⊗ n)dγ − (f , w)
T ∈Th
∂T
T ∈Th
∂T
T ∈Th
=
(−∇p, w)L2 (T ) +
T ∈Th
=−
T ∈Th
=−
γ∈Γh
∂T
γ
p(w · n)dγ +
∂T
T ∈Th
p[w · n]dγ +
(∇u) : (w ⊗ n)dγ
γ∈Γh
γ
(∇u) : (w ⊗ n)dγ
(∇u) : [w ⊗ n]dγ =: S1 + S2 ,
since p and ∇u have well-defined traces on γ ∈ Γh .
Applying Lemma 3.5 with φ = p and Theorem 1.1 gives
|S1 | hf L2 (Ω) wh .
For any γ ∈ Γh , we pick Tγ ∈ Th that has γ as its edge. Then we use the averages
of ∇u on Tγ and [w ⊗ n] on γ to obtain
(∇u − (∇u)Tγ ) : ([w ⊗ n] − Π0γ [w ⊗ n])dγ
S2 =
γ∈Γh
+
γ
γ∈Γh
γ
(∇u − (∇u)Tγ ) : (Π0γ [w ⊗ n])dγ +
γ∈Γh
γ
(∇u)Tγ : (Π0γ [w ⊗ n])dγ
=: B1 + B2 + B3 .
For term B1 , applying Lemma 3.4(ii) to ∇u, Lemma 3.4(iii) to [w ⊗ n], and the
regularity results in Theorem 1.1, we obtain
|B1 | h∇uH1 (Ω) wh hf L2 (Ω) wh .
Estimation on term B2 is similar to that of A2 in the proof of Lemma 3.5:
|B2 | hf L2 (Ω) wh .
For B3 ,we apply Lemma 3.4(i) and Theorem 1.1 to obtain
1
−1
hγ2 (∇u)Tγ L2 (γ) hγ 2 Π0γ [w ⊗ n]L2 (γ)
|B3 | ≤
γ∈Γh
⎛
h⎝
γ∈Γh
⎞ 12 ⎛
(∇u)Tγ 2L2 (Tγ ) ⎠ ⎝h−2
⎞ 12
(Π0γ [w ⊗ n])2 ⎠
γ∈Γh
h∇uL2 (Ω) wh hf L2 (Ω) wh .
Combining the above estimates proves the lemma.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
PENALTY-FACTOR-FREE METHODS FOR STOKES PROBLEMS
2175
Lemma 3.7. Let u ∈ H2 (Ω) ∩ H10 (Ω) ∩ H(div0 ; Ω) be the solution of (3), and
uh ∈ Wh be the solution of (15). Then
u − uh L2 (Ω) h2 f L2 (Ω) + hu − uh h .
(40)
Proof. We apply a duality argument. Let (z, q) be the solutions of the following
dual problem:
⎧
⎪
⎨−Δz + ∇q = f := u − uh in Ω,
∇ · z = 0 in Ω,
⎪
⎩
z|∂Ω = 0.
Theorem 1.1 and Lemma 3.1 imply
qH 1 u − uh L2 ,
zH2 u − uh L2 ,
z − Πh zh hu − uh L2 .
We split u − uh 2L2 into three groups of terms:
f , u) − (
f , uh ) = Ah (z, u) − (
f , uh )
u − uh 2L2 = (
= Ah (z − Πh z, u − uh ) + (Ah (Πh z, u)
− Ah (Πh z, uh )) + (Ah (z, uh ) − (
f , uh ))
= Ah (z − Πh z, u − uh ) + (Ah (u, Πh z)
− (f , Πh z)) + (Ah (z, uh ) − (
f , uh ))
=: S1 + S2 + S3 ,
where S2 and S3 characterize the loss of Galerkin orthogonality due to the nonconformity Wh V . For S3 , we use the techniques in proving Lemmas 3.5 and 3.6,
continuity of u, and ∇h · (Πh z) = 0 to obtain
S3 = −
(∇q, uh )L2 (T ) +
∇z : (uh ⊗ n)dγ
T ∈Th
=−
γ∈Γh
=
γ∈Γh
γ
γ
T ∈Th
∂T
γ∈Γh
γ
q[uh · n]dγ +
q[(u − uh ) · n]dγ −
∇z : [uh ⊗ n]dγ
γ∈Γh
γ
∇z : [(u − uh ) ⊗ n]dγ
hqH 1 u − uh h + h
f L2 u − uh h
hu − uh L2 u − uh h .
Similarly, for S2 , we have
|S2 | hpH 1 z − Πh zh + hf L2 z − Πh zh h2 f L2 u − uh L2 .
The boundedness of Ah implies
|S1 | z − Πh zh u − uh h hu − uh L2 u − uh h .
Combining the estimates of Si (i = 1, 2, 3) proves the lemma.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2176
JIANGGUO LIU
Remark. Actually, estimating S3 in the proof of Lemma 3.7 needs estimates (36)
and (37) being valid for w ∈ V + Wh , which can be proved by using the trace theorem
[7].
Theorem 3.1. Let u ∈ H2 (Ω) ∩ H10 (Ω) ∩ H(div0 ; Ω), p ∈ H 1 (Ω)/R be the
solutions of (3), and uh ∈ Wh be the solution of (15). Then we have
u − uh h hf L2 (Ω) ,
(41)
u − uh L2 (Ω) h2 f L2 (Ω) ,
[uh · n]dγ h2 f L2 (Ω) .
(42)
(43)
γ∈Γh
γ
Proof. The h-norm estimate follows immediately from Lemmas 3.2, 3.3, and 3.6.
The L2 -norm estimate (42) follows from (41) and Lemma 3.7. The last
estimate
(43) on the total normal flux jump in the numerical solution follows from γ∈Γh 1 =
O(h−2 ) (quasiuniformity of meshes), continuity of the exact solution, and the Cauchy–
Schwarz inequality:
|Π0γ [uh · n]| = h
|Π0γ [(u − uh ) · n]|
[uh · n]dγ ≈ h
γ∈Γh
γ
γ∈Γh
⎛
h⎝
⎞ 12 ⎛
1⎠ ⎝
γ∈Γh
γ∈Γh
⎞ 12
(Π0γ [(u − uh ) · n])2 ⎠
γ∈Γh
hu − uh h h2 f L2 (Ω) ,
which completes the proof.
3.3. Error estimates for the local div penalty scheme. In this subsection,
we present a brief error analysis on Scheme II. We highlight the main ideas and
skip details that are similar to those in the error estimation of Scheme III and the
techniques in [3, 4].
We first identify error sources of Scheme II in Lemma 3.8. The approximation
capacity of the finite element subspace Vh is established in Lemma 3.9 based on the
fact that it includes the Crouzeix–Raviart elements.
Lemma 3.8. Let u ∈ H10 (Ω) ∩ H(div0 ; Ω) be the solution of (4), and uh ∈ Vh be
the solution of (12). Then
(44)
u − uh h inf u − vh + sup
v∈Vh
0=v∈Vh
Ah (u − uh , v)
.
vh
Lemma 3.9. Under the assumption in Lemma 3.1, the following holds:
(45)
inf u − vh ≤ u − Πh uh hf L2 (Ω) .
v∈Vh
Lemma 3.10. Let v ∈ Vh . Then
(46)
2
h−1
γ [v · n]L2 (γ) |v|2H1 (T ) ,
T ∈Tγ
(47)
2
h−1
γ [v ⊗ n]L2 (γ) |v|2H1 (T ) .
T ∈Tγ
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
PENALTY-FACTOR-FREE METHODS FOR STOKES PROBLEMS
2177
Lemma 3.11. Let u ∈ H2 (Ω) ∩ H10 (Ω) ∩ H(div0 ; Ω) be the solution of (3), and
uh ∈ Vh be the solution of (12). Then
(48)
sup
0=v∈Vh
Ah (u − uh , v)
hf L2 (Ω) .
vh
Proof. For any v ∈ Vh , integration by parts leads to
(p, ∇ · v)L2 (T ) −
p[v · n]dγ +
∇u : [v ⊗ n]dγ,
Ah (u − uh , v) =
T ∈Th
γ∈Γh
γ
γ∈Γh
γ
where p is the pressure solution of (3). The second and third terms on the righthand side above can be estimated using Lemma 3.10 and the techniques in proving
Lemmas 3.5 and 3.6. For the first term, we have
12 12
2
2
(p, ∇ · v)L2 (T ) ≤
pL2 (T )
∇ · vL2 (T )
T ∈Th
T ∈Th
= pL2 (Ω) h h−2
T ∈Th
∇ · v2L2 (T )
12
hf L2 (Ω) vh ,
T ∈Th
by the Cauchy–Schwarz inequality and the regularity Theorem 1.1. Combining the
estimates for all three terms gives the result of the lemma.
Lemma 3.12. Let u ∈ H2 (Ω)∩H10 (Ω)∩H(div0 ; Ω), p ∈ H 1 (Ω)/R be the solutions
of (3), and uh ∈ Vh be the solution of (12). Then
(49)
u − uh L2 (Ω) h2 f L2 (Ω) + hu − uh h .
Theorem 3.2. Let u ∈ H2 (Ω) ∩ H10 (Ω) ∩ H(div0 ; Ω), p ∈ H 1 (Ω)/R be the
solutions of (3), and uh ∈ Vh be the solution of (12). Then
(50)
u − uh h hf L2 (Ω) ,
(51)
u − uh L2 (Ω) h2 f L2 (Ω) ,
(52)
∇h · uh L2 (Ω) h2 f L2 (Ω) .
Proof. The first two estimates in the h- and L2 -norms can be derived in the same
way as in Theorem 3.1. The third estimate on the total divergence residual follows
from the solenoidal property ∇ · u = 0 and dominance
h−2 ∇h · (u − uh )2L2 (Ω) ≤ u − uh 2h .
4. Numerical experiments.
Example 1: A swirling velocity with a no-slip boundary condition. We present
results on a swirling velocity with a prescribed pressure [19]:
u(x, y) = (sin2 (πx) sin(2πy), − sin(2πx) sin2 (πy)),
p(x, y) = π sin(2πx) sin(2πy).
The velocity admits a no-slip boundary condition on the unit square Ω = (0, 1)2 . We
set μ = 1 and compute the body force f (x, y) accordingly.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2178
JIANGGUO LIU
Table 1
Convergence rates of Scheme II on Example 1 (swirling velocity).
1/h
4
8
16
32
64
u − uh h
2.414E00
1.276E00
6.513E-1
3.277E-1
1.641E-1
Rate
–
0.91
0.97
0.99
0.99
u − uh L2
1.191E-1
3.751E-2
1.044E-2
2.711E-3
6.852E-4
Rate
–
1.66
1.84
1.94
1.98
∇h · uh L2
1.477E-1
4.425E-2
1.190E-2
3.042E-3
7.653E-4
Rate
–
1.73
1.89
1.96
1.99
Table 2
Convergence rates of Scheme III on Example 1 (swirling velocity).
1/h
4
8
16
32
64
u − uh h
3.125E00
1.647E00
8.412E-1
4.234E-1
2.120E-1
Rate
–
0.92
0.96
0.99
0.99
u − uh L2
Rate
2.336E-1
6.276E-2
1.650E-2
4.198E-3
1.052E-3
–
1.89
1.92
1.97
1.99
[uh · n]dγ Rate
3.236E-1
9.142E-2
2.410E-2
6.127E-3
1.538E-3
–
1.82
1.92
1.97
1.99
γ∈Γh
γ
For both schemes, the discrete linear systems are symmetric and solved by the
preconditioned conjugate gradient method with threshold and tolerance both set to
10−9 . For Scheme II, the preconditioner is the diagonal part of the global coefficient
matrix; for Scheme III, the preconditioner is the global mass matrix, which is a
5 × 5 block diagonal matrix and prefactorized using the Cholesky algorithm. As
shown in Tables 1 and 2, the errors of the numerical solutions obtained from Scheme
III measured in the L2 -norm are respectively larger than those of Scheme II, but
both schemes exhibit clearly second order convergence. Similarly, the first order
convergence in the h-norm can be observed in numerical solutions of both Scheme II
and Scheme III.
For Scheme II, the numerical solutions are not divergence-free inside each element.
Instead the divergence residual is a piecewise constant on the mesh. As shown in
Table 1 and proved in Theorem 3.2, the L2 -norm of the total divergence residual
exhibits second order convergence. In this regard, it is comparable to the Taylor–
Hood P 2-P 1 element.
For Scheme III, the numerical solutions are divergence-free pointwise inside each
element, but have jumps across edges. Our numerical results in Table 2 verify the
second order convergence of the total normal flux jump,
[uh · n]dγ .
γ∈Γh
γ
Example 2: Lid-driven cavity. The lid-driven cavity problem is a popular test
problem that does not have a known exact solution. Let Ω = (0, 1)2 be the cavity
domain. The fluid moves at a unit speed on the upper side, while it remains still on
the other three sides. To be more specific, a Dirichlet boundary condition is given as
(1, 0)
if x ∈ (0, 1), y = 1,
u|∂Ω =
(0, 0)
elsewhere.
The boundary condition is discontinuous at the two upper corners, which introduces
singularity in the pressure and discontinuity in the velocity.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2179
PENALTY-FACTOR-FREE METHODS FOR STOKES PROBLEMS
1
1
0.9
0.9
0.8
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
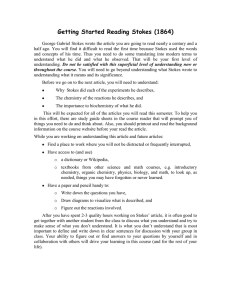
Fig. 1. Example 2 (lid-driven cavity). Left: Scheme II. Right: Scheme III. Streamlines of
numerical velocities obtained on a uniform triangular mesh with h = 1/16. Streamline values
[0.0001, 0.001, 0.01, 0.03, 0.05, 0.07, 0.09].
Table 3
Numerical results of Scheme III on Example 2 (lid-driven cavity).
1/h
Itrs.
[uh · n]dγ Rate
2.001E-1
9.825E-2
3.297E-2
9.200E-3
2.396E-3
–
1.01
1.58
1.84
1.94
γ∈Γh
4
8
16
32
64
78
217
729
2432
8509
γ
max |Π0γ [uh · n]|
Rate
7.466E-2
3.383E-2
1.092E-2
3.015E-3
7.834E-4
–
1.14
1.63
1.85
1.94
γ∈Γh
When Scheme II is applied to the lid-driven cavity problem, one could enforce
Dirichlet boundary conditions at boundary edge midpoints in an easy way: for a row
in the linear system corresponding to a boundary velocity component, set the righthand side to the boundary value, the diagonal entry of the coefficient matrix to 1,
and other entries to 0. The slightly nonsymmetric system can be solved using the
bi-conjugate gradient stabilized method with tolerance set to 10−9 . For Scheme III,
we enforce the boundary conditions in a weak sense, and the resulting linear system
is still symmetric, solved using the preconditioned conjugate gradient method. Both
threshold and tolerance are set to 10−9 .
Shown in Figure 1 are plots of the numerical velocities obtained from using
Schemes II and III on a triangular mesh with h = 1/16. The main vortex centered at (0.50, 0.73) is well captured by both schemes. The only noticeable difference
is that the contour for streamline value 0.09 of Scheme II is slightly larger than that
of Scheme III.
As analyzed in [9], the exact velocity is in H1−ε (Ω) for any ε ∈ (0, 12 ), but just
not in H1 (Ω). Theorem 3.1 no longer holds, but in Table 3 we can observe close to
second order convergence of the jumps in numerical solutions. Listed in the second
column of Table 3 are the numbers of iterations.
Remark. For Scheme III, the two penalty terms
(53)
h−2
γ∈Γh
(Π0γ [u · n])(Π0γ [v · n]),
h−2
(Π0γ [u ⊗ n]) : (Π0γ [v ⊗ n])
γ∈Γh
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
2180
JIANGGUO LIU
are redundant from a theoretical viewpoint, since the former can be controlled by
the latter. But our numerical experiments indicate that this combination produces
smaller errors than the tensor penalty term does. (Results are not reported here due
to space limitations.) Another equivalent combination of the normal and tangential
penalty terms
h−2
γ∈Γh
(Π0γ [u · n])(Π0γ [v · n]),
h−2
(Π0γ [u × n]) : (Π0γ [v × n])
γ∈Γh
also does not produce better numerical results. This is not really a surprise, since
the two terms in (53) penalize properly the H(div)- and H10 -nonconformity. The
redundant normal flux penalty term does not affect the condition number of the
linear system, while increasing the assembly cost negligibly, compared to that of
solving the linear system. Therefore, we stay with the formulation in (16), which is
also convenient for error analysis.
5. Concluding remarks. It can be observed that Schemes II and III utilize the
weak overpenalization techniques [5, 6]. A benefit of the overpenalization is that the
nonconformity of numerical solutions are well controlled. Both the total divergence
residual in Scheme II and the total normal flux jump in Scheme III have second order
convergence. Another benefit is that there is no need for choosing penalty factors,
while the formulations are still symmetric and the conjugate gradient methods can
be used. This is in contrast to a common feature exhibited in the interior penalty
DG methods: for symmetric formulations, one has to choose penalty factors large
enough (somewhat uncertain). A new issue accompanying overpenalization is the large
condition number behaving like O(h−4 ) [5]. But preconditioners can be constructed
[6].
Both Scheme II (local divergence penalty) and Scheme III (DG-LDF) can be
readily extended to three-dimensional Stokes problems. For Scheme II on tetrahedral
meshes, one just needs to construct scalar Lagrangian basis functions at face midpoints
and then to use the normal and (two) tangential vectors of each face [13]. For Scheme
III, LDF bases are actually independent of element geometry and can be constructed
by taking curls of polynomial potentials [1].
The methods presented in this paper can also be applied to Stokes flows in nonconvex domains, e.g., flow over a step. In this regard, graded meshes [3] might be
helpful in resolving corner singularities; error estimates could still carry over but are
more involved. Similar to [3], convergence of order (2 − ε) (here ε > 0 is arbitrarily
small) in the L2 -norm can also obtained. A better characterization in exactly second
order would use Besov spaces.
The two new methods together with the Crouzeix–Raviart nonconforming elements all use P1 shape functions, through enforcing weak continuity at edge midpoints, i.e., the zeroth order Gaussian quadrature points. It is certainly possible to
use higher order polynomials and enforce weak continuity at the higher order Gaussian quadrature points. This was discussed in [12] but is apparently challenging for
construction of global basis functions when the Crouzeix–Raviart formulation is applied to complicated domains. In this regard, Schemes II and III are attractive, since
there is no difficulty in constructing global basis functions. For Scheme III, the independence of shape functions from element geometry and their hierarchical structure
allow us to have both h- and p-adaptive refinements. This is under investigation and
will be reported in our future work.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.
PENALTY-FACTOR-FREE METHODS FOR STOKES PROBLEMS
2181
Acknowledgments. The author sincerely thanks the reviewers for their constructive comments, which have helped improve the quality of this paper.
REFERENCES
[1] G.A. Baker, W.N. Jureidini, and O.A. Karakashian, Piecewise solenoidal vector fields and
the Stokes problem, SIAM J. Numer. Anal., 27 (1990), pp. 1466–1485.
[2] S.C. Brenner, J. Cui, F. Li, and L.Y. Sung, A nonconforming finite element method for
two-dimensional curl-curl and grad-div problem, Numer. Math, 109 (2008), pp. 509–533.
[3] S.C. Brenner, F. Li, and L.Y. Sung, A locally divergence-free nonconforming finite element
methods for the time-harmonic Maxwell equations, Math. Comp., 76 (2007), pp. 573–595.
[4] S.C. Brenner, F. Li, and L.Y. Sung, A nonconforming penalty method for a two-dimensional
curl-curl problem, Math. Model Methods Appl. Math, 19 (2009), pp. 651–668.
[5] S.C. Brenner, F. Li, and L.-Y. Sung, A locally divergence-free interior penalty method for
two-dimensional curl-curl problems, SIAM J. Numer. Anal., 46 (2008), pp. 1190–1211.
[6] S.C. Brenner, L. Owens, and L.Y. Sung, A weakly over-penalized symmetric interior penalty
method, Electronic Trans. Numer. Anal., 30 (2008), pp. 107–127.
[7] S.C. Brenner and L.R. Scott, The Mathematical Theory of Finite Element Methods, 3rd
ed., Springer, New York, 2008.
[8] F. Brezzi and M. Fortin, Mixed and Hybrid Finite Element Methods, Springer-Verlag, Berlin,
1991.
[9] Z. Cai and Y. Wang, An error estimate for two-dimensional Stokes driven cavity flow, Math.
Comp., 78 (2009), pp. 771–787.
[10] B. Cockburn and J. Gopalakrishnan, Incompressible finite elements via hybridization. Part
I: The Stokes system in two space dimensions, SIAM J. Numer. Anal., 43 (2005), pp. 1627–
1650.
[11] B. Cockburn, G. Kanschat, D. Schötzau, and C. Schwab, Local discontinuous Galerkin
methods for the Stokes system, SIAM J. Numer. Anal., 40 (2002), pp. 319–343.
[12] M. Crouzeix and P. Raviart, Conforming and nonconforming finite element methods for
solving the stationary Stokes equations, RAIRO Anal. Numer., 3 (1973), pp. 33–75.
[13] W. Dörfler and M. Ainsworth, Reliable a posterior error control for nonconforming finite
element approximation of Stokes flow, Math. Comp., 74 (2005), pp. 1599–1619.
[14] V. Girault and P.A. Raviart, Finite Element Methods for Navier-Stokes Equations,
Springer-Verlag, New York, 1986.
[15] D.F. Griffiths, Finite elements for incompressible flows, Math. Methods Appl. Sci., 1 (1979),
pp. 16–31.
[16] M.D. Gunzburger, Finite Element Methods for Viscous Incompressible Flows: A Guide to
Theory, Practice, and Algorithms, Academic Press, New York, 1989.
[17] O. Karakashian and T. Katsaounis, Numerical simulation of incompressible fluid flow using
locally solenoidal elements, Comput. Math. Appl., 51 (2006), pp. 1551–1570.
[18] O.A. Karakashian and W.N. Jureidini, A nonconforming finite element method for the
stationary Navier–Stokes equations, SIAM Numer. Anal., 35 (1998), pp. 93–120.
[19] R. J. LeVeque, High-resolution conservative algorithms for advection in incompressible flow,
SIAM J. Numer. Anal., 33 (1996), pp. 627–665.
[20] J. Liu and R. Cali, A note on the approximation properties of the locally divergence-free finite
elements, Int. J. Numer. Anal. Model., 5 (2008), pp. 693–703.
[21] S. Sun and J. Liu, A locally conservative finite element method based on piecewise constant
enrichment of the continuous Galerkin method, SIAM J. Sci. Comput., 31 (2009), pp. 2528–
2548.
[22] F. Thomasset, Implementation of Finite Element Methods for Navier-Stokes Equations,
Springer-Verlag, Berlin, 1981.
[23] J. Wang, Y. Wang, and X. Ye, A robust numerical method for Stokes equations based on
divergence-free H(div) finite element methods, SIAM J. Sci. Comput., 31 (2009), pp. 2784–
2802.
Copyright © by SIAM. Unauthorized reproduction of this article is prohibited.