Research Statement
advertisement

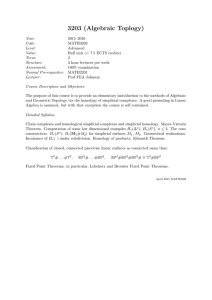
Research Statement Henry Adams (adams@math.colostate.edu) I am interested in computational topology and geometry, combinatorial topology, and applied topology, including applications to data analysis and to sensor networks. My research program: §1. Addresses fundamental questions on persistent homology in data analysis. The shape of data often depends on a choice of scale, and the philosophy behind persistent homology is to vary the scale from small to large and to trust those topological features which persist. However, the tool representing the data’s shape (a Vietoris–Rips complex) is only well-understood at small scales. My research addresses the following fundamental question: how do Vietoris–Rips complexes behave as we increase the scale parameter? §2. Builds algorithms for sensor networks. In minimal sensor network problems, one is given only local data measured by many weak sensors but tries to answer a global question. For example, if sensors are scattered in a domain and each cannot measure its location but instead only the identities of its neighboring sensors, can we determine if the entire domain is covered? Topological tools (including Vietoris–Rips complexes and zigzag persistent homology) are useful for this passage from local to global. §3. Develops geometric models for data. I study an approach, inspired by Morse theory, which uses the nudged elastic band method from computational chemistry to build a coarse cell complex model of the dense regions of a data set. The method has been applied to data arising from social networks, image processing, and microarray analysis. §4. Offers interdisciplinary research training for students. I am prepared to mentor students not only in theoretical work but also on applied projects, for example using the JavaPlex software package which I help maintain. Together these topics form a unified program in applied topology, with data analysis as the recurring goal, and with persistent homology and Vietoris–Rips complexes as recurring tools. §1. Persistent Homology and Vietoris–Rips Complexes Large sets of high-dimensional data are common in most branches of science and engineering, and their shapes reflect important patterns within. Sometimes these shapes are nonlinear and difficult to detect with traditional tools. The goal of topological data analysis is to produce simple combinatorial descriptors for data sets with interesting shapes, and persistent homology is a popular technique for measuring the shape of a data set [8]. How can we recover the shape of a data set X? Given a choice of scale r, the Vietoris–Rips complex connects nearby data points. Definition. Given metric space X and scale parameter r ≥ 0, the Vietoris–Rips simplicial complex VR(X, r) contains a finite subset σ ⊆ X as a simplex if its diameter is at most r. We do not know a priori how to choose the scale r, and so the idea of persistent homology is to compute the homology of the Vietoris–Rips complex of data set X over a large range of scale parameters r. We regard topological features which persist as the scale changes as representative of the shape of the data, and we disregard topological features which do not persist as noise. For example, Carlsson et al. use persistent homology to identify a Klein 1 90]:= Rips_CircularPoints.nb 5 Demo@data1, 0, 2D Rips simplicial complex Appearance draw balls draw complex Filtration parameter t 0.49 bottle model for a set of optical image patches [10], and I use persistent homology to model a set of range image patches [6]. 90]= S1 S 3 S5 S 7 Homotopy type of VR(S1,r) as scale r increases Figure 1. (Left) A Vietoris–Rips complex of 9 points on the circle. (Right) As the scale parameter increases, the Vietoris–Rips complex of the entire circle obtains the homotopy types of the circle, the 3-sphere, the 5-sphere, the 7-sphere, . . . , until finally it is contractible. The motivation for using Vietoris–Rips complexes is Hausmann and Latschev’s reconstruction result [13, 15]: for M a Riemannian manifold, data set X ⊂ M a sufficiently dense sample, and scale r sufficiently small, we have a homotopy equivalence VR(X, r) ' M . But as the main idea of persistence is to allow scale r to vary, the assumption that r is sufficiently small does not hold in practice. The following question is fundamental for applications of persistent homology to data analysis. Question. How does the homotopy type of the Vietoris–Rips complex of a space change as the scale parameter r increases? Theorem 1 (Adamaszek & Adams [1]). As the scale r increases, the Vietoris–Rips complex of the circle S 1 obtains the homotopy type of the circle, the 3-sphere, the 5-sphere, the 7sphere, . . . , until finally it is contractible. Our result is surprising, as many people in my field assumed that the Vietoris–Rips complex of the circle would remain homotopy equivalent to the circle until it became contractible. Furthermore, we extend our result to classify the homotopy types of Vietoris–Rips complexes of arbitrary d-dimensional tori under the l∞ metric. Theorem 1 builds upon my joint work [2]. Theorem 2 (Adamaszek, Adams, Frick, Peterson, and Previte-Johnson [2]). The VietorisRips complex of an arbitrary data set X ⊂ S 1 of size n is homotopy equivalent to either a point, an odd-dimensional sphere, or a wedge sum of spheres of the same even dimension. This homotopy type can be computed in time O(n log n). This near-linear complexity is much smaller than the size of the Vietoris–Rips complex, which grows exponentially with n. Our work in [2] furthermore has applications to cyclic polytopes, to sizes of gaps between roots of trigonometric polynomials, to the Nerve Theorem, and to the Lovász bound on the chromatic number of a graph. Future Work. As the scale r increases, how does the homotopy type of the Vietoris–Rips complex of a broader class of spaces, such as d-spheres for d ≥ 2, behave? For a Riemannian manifold M , is the connectivity (dimension up to which all homotopy groups vanish) of Vietoris–Rips complex VR(M, r) a non-decreasing function of r? 2 §2. Coverage Problems in Sensor Networks Sensor networks are increasingly being designed for tasks deemed too difficult or timeconsuming for humans, such as surveillance, wildlife sampling, and search and rescue. The idea behind minimal sensor networks is to deploy a large collection of cheap devices, perhaps not even equipped with GPS receivers, and then to combine local measurements from individual sensors to answer a global question. Topological tools are useful for this passage from local to global. For example, suppose that ball-shaped sensors wander in a bounded domain. A sensor can’t measure its location (it has no GPS receiver) but does know when it overlaps a nearby sensor. We may then approximate the time-varying homotopy type of the region covered by sensors using Vietoris–Rips simplicial complexes. We say that an evasion path exists if a moving evader can avoid being detected by the sensors. CechRips.nb 4 CechRips.nb 3 6 CechRips.nb Cech simplicial complex Cech simplicial complex Cech simplicial complex Appearance Appearance Appearance draw one simplices draw one simplices draw one simplices draw Cech complex draw Cech complex draw Cech complex draw Rips complex draw Rips complex Filtration parameter t draw Rips complex Filtration parameter 0.186 Out[98]= t Filtration parameter 0.186 Out[98]= Sensor network at fixed time. t 0.186 Out[98]= Connectivity graph. Vietoris–Rips complex. The Evasion Problem. Using only the time-varying homotopy type of the covered region of a mobile sensor network, can we determine if an evasion path exists? Printed by Mathematica for Students Printed by Mathematica for Students Printed by Mathematica for Students De Silva & Ghrist [11] give a necessary homological condition, depending on the timevarying connectivity graph of the sensors, for an evasion path to exist. A downside to their algorithm is that it isn’t streaming (data must be stored from when the sensors start moving until they stop), which is computationally intractable for sensor networks moving over extended periods of time. Theorem 3 (Adams & Carlsson [4, 5]). If there is an evasion path in a mobile sensor network, then there is a full-length interval in the (top–1)-dimensional zigzag persistent homology of the time-varying covered region. We compute this criterion in a streaming fashion. Furthermore, in [4, 5] we show that the the time-varying homotopy type of the sensor network does not determine if an evasion path exists: the time-varying embedding into spacetime also matters (Figure 3). This result is surprising because in the static case when the sensors don’t move, no embedding information is needed. What minimal sensing capabilities produce necessary and sufficient conditions? Theorem 4 (Adams & Carlsson [4, 5]). Suppose in a planar sensor network we can measure the cyclic orderings of the edges about each sensor (say from a rotating radar scan) and the edge lengths between adjacent sensors. Then we can determine if an evasion path exists. Future Work. In the spirit of minimal sensing, I would like to remove the assumption that we are given local distance measurements in Theorem 4. 3 4 a.nb In[422]:= 6 Rips data1, t, 0, 1 In[423]:= Rips data2, t, 0, 1 a.nb In[424]:= a.nb 8 5 a.nb Rips!data3y, t, 0, 1" In[425]:= Rips!data4y, t, 0, 1" In[426]:= a.nb 107 Rips!data5y, t, 0, 1" In[427]:= Rips!data6, t, 0, 1" a.nb In[428]:= Rips simplicial complex Rips simplicial complex Rips simplicial complex Rips simplicial complex Rips simplicial complex Rips simplicial complex Rips simplicial complex Appearance Appearance Appearance Appearance Appearance Appearance Appearance draw complex draw complex draw complex draw complex draw complex draw complex draw balls draw balls draw balls draw balls draw balls draw balls Filtration parameter Filtration parameter t Filtration parameter t0.358 Filtration parameter t0.358 Filtration parameter t0.358 9 a.nb 9 draw complex draw balls Filtration parameter t0.358 a.nb Rips data7, t, 0, 1 Filtration parameter t0.358 t0.358 0.358 Covered region Out[422]= 4 Out[423]= Out[424]= Out[425]= a.nb In[422]:= 12 Rips!data1, t, 0, 1" In[423]:= Rips!data3n, t, 0, 1" Out[426]= a.nb In[430]:= a.nb Rips!data4n, t, 0, 1" Out[427]= 5 In[431]:= a.nb Rips!data5n, t, 0, 1" Out[428]= 11 In[427]:= 10 Rips!data6, t, 0, 1" a.nb In[428]:= a.nb Rips simplicial complex Rips simplicial complex Rips simplicial complex Rips simplicial complex Rips simplicial complex Rips simplicial complex Appearance Appearance Appearance Appearance Appearance Appearance draw complex draw complex draw complex draw complex draw complex draw complex draw balls draw balls draw balls draw balls draw balls draw balls Filtration parameter Filtration parameter t0.358 Out[423]= t0.358 Out[429]= Printed by Mathematica for Students Filtration parameter t0.358 Out[430]= Printed by Mathematica for Students Filtration parameter Out[431]= Printed by Mathematica for Students draw balls Filtration parameter t0.358 Out[427]= Printed by Mathematica for Students draw complex Filtration parameter t0.358 13 Rips data7, t, 0, 1 Appearance t Out[422]= In[429]:= Rips simplicial complex Filtration parameter Time Covered region Rips data2, t, 0, 1 t0.358 0.358 Out[428]= Printed by Mathematica for Students Printed by Mathematica for Students Printed by Mathematica for Students Time Figure 3. Each row is a sensor network, represented both as a covered region in spacetime and by seven sequential Vietoris–Rips simplicial complexes. Surprisingly, the two covered regions are homotopy equivalent through time-preserving maps. The top network contains an evasion path, but the bottom network does not since the evader cannot travel backwards in time. Hence the existence of evasion path depends not only on the time-varying homotopy type, but also on the embedding. Printed by Mathematica for Students Printed by Mathematica for Students Printed by Mathematica for Students Printed by Mathematica for Students Printed by Mathematica for Students Printed by Mathematica for Students Printed by Mathematica for Students In the second half of my PhD thesis I study a natural extension of the Evasion Problem: can we describe the entire space of evasion paths? I use a homotopy spectral sequence for diagrams of spaces, which in this setting has input depending on unstable invariants of the uncovered region, and under favorable circumstances converges to information about the homotopy groups of the space of evasion paths [4, 12, 7]. §3. Geometric Models for Data using Nudged Elastic Band Though persistent homology may measure the homology groups of a data set, it remains to build a coarse geometric model realizing its shape. My collaborators and I introduce a method for geometrically modelling data sets that are genuinely nonlinear and difficult to study with traditional tools [3]. We adapt Morse theory to the setting of point clouds, i.e. finite sets of points in Euclidean space, using a kernel density estimator as the analogue of the 2 Morse function. We sample cells from the skeleton of the Morse complex using the nudged elastic band method from computational chemistry [14]. As output we produce a multiscale sequence of cell complexes modeling the dense regions of the data, which in accordance with the idea of topological persistence gives a more accurate representation of the data than a single complex at a fixed choice of scale. We test our Morse-based approach on a variety of data sets, including sets arising in social 3 networks, image processing, and microarray analysis. We find compact complexes that reveal important nonlinear patterns and that improve our qualitative understanding of the data (Figure 4). Future Work. I would like to integrate nudged elastic band with persistent homology in order to create geometric models for data sets while measuring their homology groups. An important question is how to properly extend nudged elastic band to higher-dimensional cells. 4 Figure 4. (Left) An image processing data set of 3×3 pixel patches, and our cellular model containing four 0-cells and eight 1-cells [3]. (Right) The model’s interpretation. The most common non-constant 3 × 3 patches are linear gradients at all angles and quadratic gradients in the preferred horizontal and vertical directions. We obtain a geometric representation of the three-circle model from [10], as opposed to only computing its homology groups. §4. Interdisciplinary Research Training Applied topology is an attractive field for student research. Such projects not only show students how math is used in other branches of science, but also help students better understand abstract concepts such as functoriality (which appears naturally when applying persistent homology to data). I am prepared to mentor research both in topological data analysis and in sensor networks. In particular, JavaPlex is a software package for applied topology [16], used for example in [6, 10]. I wrote the tutorial for JavaPlex, am a member of the JavaPlex maintenance team, and give interactive demonstrations at conferences and workshops. I designed the tutorial at a level appropriate for graduate students or advanced undergraduates, and it contains exercises, solutions, and examples with real-life data. Research in applied topology is interdisciplinary. As an author of the JavaPlex software tutorial, I serve as a contact person for users with questions on how to adapt JavaPlex to the specifics of their genre of data. I have provided support for students and scientists doing research in a wide range of disciplines, including mathematics, computer science, biology, medicine, neuroscience, chemical engineering, electrical engineering, physics, economics, and music. I believe this service role is important because it both benefits my research community and introduces me to future collaborators. References [1] Michal Adamaszek and Henry Adams, The Vietoris–Rips complexes of a circle. Available at arxiv:1503.03669, 2015. [2] Michal Adamaszek, Henry Adams, Florian Frick, Chris Peterson, and Corrine Previte-Johnson, Nerve complexes of circular arcs. Available at arxiv:1410.4336, 2015. [3] Henry Adams, Atanas Atanasov, and Gunnar Carlsson, Nudged elastic band in topological data analysis. Topological Methods in Nonlinear Analysis 45:247–272, 2015. [4] Henry Adams, Evasion paths in mobile sensor networks. PhD thesis, Stanford University, 2013. [5] Henry Adams and Gunnar Carlsson, Evasion paths in mobile sensor networks. International Journal of Robotics Research 34:90–104, 2014. 5 [6] Henry Adams and Gunnar Carlsson, On the nonlinear statistics of range image patches. SIAM Journal on Imaging Sciences 2:110-117, 2009. [7] Aldridge K Bousfield and Daniel M Kan, The homotopy spectral sequence of a space with coefficients in a ring. Topology 11:79–106, 1972. [8] Gunnar Carlsson, Topology and data. Bulletin of the American Mathematical Society 46:255–308, 2009. [9] Gunnar Carlsson and Vin de Silva, Zigzag persistence. Foundations of Computational Mathematics 10:367–405, 2010. [10] Gunnar Carlsson, Tigran Ishkhanov, Vin de Silva, and Afra Zomorodian, On the local behavior of spaces of natural images. International Journal of Computer Vision 76:1–12, 2008. [11] Vin de Silva and Robert Ghrist, Coordinate-free coverage in sensor networks with controlled boundaries via homology. International Journal of Robotics Research 25:1205–1222, 2006. [12] Emmanuel Dror Farjoun and Alexander Zabrodsky, The homotopy spectral sequence for equivariant function complexes. In Algebraic Topology Barcelona 1986:54–81, 1987. [13] Jean-Claude Hausmann, On the Vietoris–Rips complexes and a cohomology theory for metric spaces. Annals of Mathematics Studies 138:175–188, 1995. [14] Hannes Jónsson, Greg Mills, and Karsten W Jacobsen, Nudged elastic band method for finding minimum energy paths of transitions. In Classical and Quantum Dynamics in Condensed Phase Systems: 285–404, 1998. [15] Janko Latschev, Vietoris–Rips complexes of metric spaces near a closed Riemannian manifold. Archiv der Mathematik 77:522–528, 2001. [16] Andrew Tausz, Mikael Vejdemo-Johansson, and Henry Adams, JavaPlex: A research software package for persistent (co)homology. In Han Hong and Chee Yap, editors, Proceedings of ICMS 2014, Lecture Notes in Computer Science 8592:129–136, 2014. Software available at http://appliedtopology.github. io/javaplex/. 6