15tPARTMENT of OCEANO RAPHY G OREGON STATE UNIVERSITY
advertisement

GC
O7
tr+
Le"'
V5G
COL MMRIA R.
OVARY
coif -ca:
Laborator)
State University
15tPARTMENT of OCEANO G RAPHY
'VENAL EM R.
SCHOOL of SCIENCE
OREGON STATE UNIVERSITY
AL SEA R.
SfUSL AW R
UMPQUA R.
COOS BAY
A REPORT ON GEOMAGNETIC
ELECTROKINETOGRAPH
OBSERVATIONS OFF THE
OREGON COAST
By
Thomas B. Curtin, Robert E. Still,
and Steve Neshyba
OFFICE OF NAVAL RESEARCH
Contract Nonr 1286(10), Project NR 083.102
Reproduction in whole or in part is permitted
for any purpose of the United States
Government.
Date Report No. 32
Reference 68-21
September 1968
DEPARTMENT OF OCEANOGRAPHY
SCHOOL OF SCIENCE
OREGON STATE UNIVERSITY
Corvallis, Oregon 97331
A REPORT ON GEOMAGNETIC ELECTROKINETOGRAPH
OBSERVATIONS OFF THE OREGON COAST
by
Thomas B. Curtin, Robert E. Still,
and Steve Neshyba
Data Report No. 32
OFFICE OF NAVAL RESEARCH
Contract Nonr 1286(10), Project NR 083-102
Reference 68-21
September 1968
John V. Byrne
Chairman
TABLE OF CONTENTS
LIST OF FIGURES
LIST OF TABLES
ABSTRACT
INTRODUCTION
2
THE GEK METHOD
2
CRUISE REPORTS
8
CONCLUSIONS AND PROJECTIONS
76
REFERENCES
78
DISTRIBUTION LIST
7 9
LIST OF FIGURES
Figure Number
1
Figure Caption
Page
Schematic representation of zero fix
turn
6
Chart outlining region of GEK measurements
8
Graphical current velocity results of
Cruise 6704
10
4
Graphical current velocity results of
6 705
12
5
Results of GEK measurements during midwater trawl
16
Graphical current velocity results of
Cruise 6706-A
17
Graph of electrical zero vs. surface temperature for Cruise 6706-A
18
Simplified schematic of circuit used for
signal summation and selection
20
Two neutrally buoyant cables simultaneously
under tow from R/V YAQUINA
21
10
GEK recorder and electronic summation
circuit box in use
22
11
Signal recorded by using various combinations of electrodes
25
12
Signal recorded under other variable
conditions
26
13
Signal received with various electrode
spacings
27
14
Signal received under spacial and filtering
changes
28
7
15
Graphical current velocity results of
Cruise 6708-A
31
16
Graph of electrical zero vs. surface temperature for Cruise 6708-A
32
17
Graphical current velocity results of Cruise
6708-D
37
18
Graph of electrical zero vs. surface temperature for Cruise 6708-D
38
19
Cruise plan adopted to compare signals from
both cables on one recorder
40
20
Graphical current velocity results (short
cables) for Cruise 6710-B
44
21
Graph of electrical zero vs. surface temperature (short cable) for Cruise 6710-B
45
22
Graphical current velocity results (long cable)
for Cruise 6710-B
46
23
Graph of electrical zero vs. surface temperature (long cable) for Cruise 6710-B
47
24
Two recorders in use on the R/V YAQUINA
49
25
GEK cable spool mounted on shaft of deep-sea
trawl winch
50
26
An example of some responses of the GEK
recorder to various input signals
51
27
An example of some responses of the unmodified recorder to various input signals
52
28
Cruise pattern traversed during 24 hour GEK
measurement
54
29
Graphical current velocity results for 24 hour
run (short cable)
63
30
Graph of electrical zero vs. surface temperature for 24 hour run (short cable)
64
31
Graphical current velocity results for 24
hour run (long cable)
65
32
Graph of electrical zero vs. surface temperature for 24 hour run (long cable)
66
33
Graphical current velocity results for Cruise
6711-E (short cable)
72
34
Graph of electrical zero vs. surface temperature for Cruise 6711-E (short cable)
73
35
Graphical current velocity results for Cruise
6711-E (long cable)
74
36
Graph of electrical zero vs. surface temperature for Cruise 6711-E (long cable)
75
LIST OF TABLES
Table Number
Table Content
Page
1
Numerical current velocity results of
Cruise 6706-A
14
2
Numerical current velocity results of
Cruise 6708-A
29
3
Numerical current velocity results of
Cruise 6708-D
35
4
Numerical current velocity results (long
cable) of Cruise 6710-B
41
5
Numerical current velocity results (short
cable) of Cruise 6710-B
42
6
Completed annotation sheet implimented
for use on the bridge during GEK maneuvers
55
7
Completed condensed data sheets initiated
for use in GEK analysis
56-61
8
24 hour temperature record at the surface
62
9
Completed bridge log sheet for Cruise 6711-E
67
Completed condensed data sheet for
68-71
10
ABSTRACT
A summary of the first year's results in a program of current
measuring techniques employing the electromagnetic method is presented.
The data was taken on hydrographic survey cruises ranging to 165 miles
offshore from Oregon. The measurements in this first phase consist solely
of those taken by the method of towed electrodes behind a ship underway
(GFK). Subsequent phases will include data from vertically moored arrays
and from shallow water moored flow meter emplacements.
The emphasis in this data report lies in the first phase development of
the electromagnetic method (towed electrodes) into a highly reliable tool for
oceanographic research. In line with this accent both theoretical considerations and field testing are mentioned in this report. At this time the theoretical
examination is in its embryonic stage, and the considerations included here
are ones particularly applicable to the field work undertaken. This work is
presented in a format of individual cruise reports. Some conclusions and
avenues of future interest follow.
2
INTRODUCTION
In March 1967 the Department of Oceanography at Oregon State
University received, on loan from the United States Naval Oceanographic
Office, a geomagnetic electrokinetograph (GEK) recorder (Leeds and Northrup)
with operating instructions and electrodes included. The purpose of this
temporary acquisition was twofold: to undertake basic research on GEK data
collection methods and interpretation improvement, and to develop a nucleus
of experience in both methods and instrumentation around which to base a
permanent GEK-hydrographic capability within the department as phase one of
an electromagnetic methods program. In pursuit of these two goals several
experiments were executed on a total of seven cruises in 1967. New equipment -- both purchased and developed -- will contribute to the more extensive
and specific program planned for 1968.
THE GEK METHOD
GEK measurements in conjunction with hydrographic data can be extremely
useful and perhaps unique in many particular areas and applications (see, for
example, Von Arx, (1950), (1962)). General mass transport approximations
(e. g. work presently being continued on the Gulf Stream by Manglesdorf (1962)
of Woods Hole Oceanographic Institution) and horizontal current measurements
in environments unfavorable to conventional current meters (e. g. areas of
dense growth, the surf zone, etc. ) are two of many such capabilities.
Another is large scale velocity field scanning for the purpose of shear zone
detection prior to employing high resolution techniques for more definitive
study. However, the degree of utility depends heavily upon correct interpretive
techniques. It is, therefore, of the upmost priority that not only the data
presented here, but all GEK data, be examined carefully and accurately, with
due regard to both the possibilities and the limitations of the content. A few
of the major points relevant to the presented data are mentioned.
In applications of Maxwell' s Equations with suitable initial and boundary
conditions, Stommel (1948), Malkus (1952), Longuet-Higgins, Stern and
Stommel (1954), Ryzhkov (1957), and Sanford (1967) have all formulated general
expressions which relate the velocity field to the electrical potential field in
the sea. Reasonable and pertinent analysis of electrical potential measurements within the limits of practical measuring devices, however, depends
ultimately upon the model within which such measurements are formulated.
The valid use of any model implies two important conditions -- that the
assumptions made in constructing the model are satisfied, and that the
3
resolution of the input data -As compatible or at least on the same scale as
that which the model produces as output results. For example, horizontal
GEK measurements in shallow areas may necessitate the use of a model
which accounts for variable earth currents. Vertical GEK probes may require
a consideration of time variability of the earth's magnetic field. An indication of general main flow characteristics can be deduced from rough
integration and averaging techniques, whereas a careful analysis of a
particular current structure would call for a model capable of resolving
hydromagnetic and Alfven waves (magneto-hydrodynamic waves with transverse type characteristics).
An insight into most of the data presented here can be gained by establishing some conditions which it seems to fulfill generally. First of all,
the flow is broad 'compared with the depth. The continental shelf is approximately 15-35 miles wide off the central coast of Oregon. West of this
distance the depth in the relevant localities is of the order of 2000 to 3000
meters. Thus, flows of over 7 kilometers in horizontal width are referred to
under this condition. Secondly, the flow is narrow compared to (a l /a2)h,
where al is the conductivity of the seawater, a 2 that of the sea bed, and h
the depth. Local temperature and salinity data of the surface water indicate
1 to be about 3. 8 S2- 1 m- 1 (Bein, Hirsekorn, and Moller, 1935). An
analysis of thermal and electrical conductivities of ocean sediments off
Oregon (Hutt, 1966) leads to an approximate value of a 2 at 0.65 1
Therefore, the flow should be narrow compared to about six times the depth.
Currents of between 7 and 8 kilometers in width should satisfy both requirements. Finally, the distance between the two points at which the potential is
measured should also exhibit an upper bound of (a / a 2 )h. This bound is
met with in all measurements taken.
These conditions are particularly convenient because they allow the use
of a two-dimensional approximation model, formulated by Sanford (1967), which
is applicable to the method of towed electrodes at the surface. Assuming the
validity of the above assumptions, and for a flow described in a right hand
coordinate system with the x axis aligned with the flow and z measured positively upward, the vertical and the horizontal electric current densities are:
-G{Fz[V(y,z) -
J = -cr{F
z
a
ay
17(y)} + F y
[V(y,C) -
Z
W
[h
7 (01c10
0
v(yC)d +
-
h
r
h
V(y,Odll
(I)
(II)
where F = vertical component of the earth's magnetic field
z
F = component of earth's magnetic field perpendicular to the flow
conductivity of surface water
v = velocity of water in x direction
= vertically averaged velocity in x direction
h = depth of water at point of measurement
For towed electrodes at the surface the horizontal current density , J yt
is of interest since this is essentially what is reflected in the measurements.
By Ohm's law the expression in brackets represents the electric field associated with such a current, and this field is expressable as the gradient of
a potential. It is this electric potential that the GEK electrodes measure.
It will be noted in the data presented here that only the north-south
ocean current components have been charted and receive attention. There
are three reasons for this procedure. First of all, patterns and changing
trends are more easily recognized in this way. Secondly, the major transport of water in the region of GEK measurements occurs in these directions.
Finally, local conditions lead to an interesting result in the above equations
for currents in such directions. The ratio of vertical to horizontal components of the earth's magnetic field can be expressed by:
F
z/FH
cot
CI
where 8 is the latitude. Since the measurements were made at approximately
45° N., this ratio is 1. The horizontal magnetic declination in this area is
Therefore:
20. 5°
F
F
H
H
= F N / cos 20. 5° = FN936
E
/ cos 69. 5° = FE / . 350
which gives,
F z/ F N1. 1
F z/ F E3.3
For flow in the north-south direction, F z and F E would be the components of
interest, and in equation (I) the first expression in the bracket, whose total
value is the electric potential gradient, would be weighted more than three
times the second expression due to the geomagnetic field terms only. (For
east-west flow, both magnetic field componenet terms are about equal, and
5
this argument does not hold.) Combining this observation with the fact that
the second expression is small due to the assumptions made about the flow*
enables a good approximation to be stated by using just the first expression.
That is, the signal (electrical potential difference) measured by the GEK
electrodes in the following data can be represented as follows:
6
-F
[v C
- '7/ (y)]
The term in brackets is the difference between surface velocity and vertically averaged velocity. This is an important fact to keep in mind in
examining the contained GEK results.
Another point also merits some attention. All experiments were done
with neutrally buoyant cables; some were carried out in rough weather. None
of the data has been corrected for such environmental factors. However, the
quantitative errors due to these factors should be noted where applicable.
To appreciate the range of these errors with buoyant cables, the partial results of experiments carried out by Knauss and Reid (1957) are quoted. "Tests
with a neutrally boyant cable towed in conjunction with a demolition (heavier
than seawater) cable show that the difference in the two currents always
results in a vector whose direction is 'down wind'. This current difference
may be the result of shear, but it is more likely the result of the neutrally
buoyant cable's making more leeway than the ship. This windage vector is
of the order of 10 to 15 cm/sec and is independent of the magnetic latitude. "
Finally, a meaningful understanding of this data-dependent as it is
upon electrical field m e a surements-warrants some ment ion of the technological aspects involved. Towing a long (250 meters) dual-conductor cable at
the surface behind the ship is essentially the method of gathering GEK data.
Two electrodes are spaced 100 meters apart at the end of the cable, and,
by means of the conducting wires within, are electrically in contact with the
ship. Thus, the electrodes give a continuous record of the potential difference (caused by the motion of ion-filled water through the earth's magnetic
field) 100 meters apart along the line of travel. See Figure 1, where a
schematic representation of this process is presented.
The leads, represented by solid dots, are connected to a shipboard
potentiometric recorder. c( and ig are the inherent potentials of the
individual electrodes relative to seawater,
is the potential difference
between the electrodes due to the motion of the seawater through the earth's
magnetic field. The average value of the signals measured on each leg of
the turn gives the true value of the potential developed by the seawater motion
alone.
*That is, the flow was considered bounded, with no large shear lines
within the bounds. If shear velocites do exist in the area to be measured, this term should be considered and this reasoning is somewhat
altered.
6
POTENTIAL
DIFFERENCE
AROUND
THIS
CIRCUIT
SEAWATER
VELOCITY
+it
POTENTIAL
DIFFERENCE
AROUND THIS
CIRCUIT C = (-a +''
-13)
180° TURN /
Figure 1.
Schematic representation of zero fix turn. Refer to text for details.
If the current is assumed to remain constant during the short period
of time the turn requires, a zero reference point is thus also established
(the mean value between each leg measurement). This point is called
electrical zero. It provides a base reference on the record against which
local magnitudes of potential difference can be measured.
The only method of eliminating electrode self potentials in the
measurement is by physically reversing the electrodes in some manner.
This is the reason for GEK turns (180°) in the cruise regime.
It would seem that once this zero point had been established , potentials could be measured everywhere by a glance of the record. But here is
where "oceanography" has a full import. For electrodes towed at the surface, ct and 13 are functions, to the first order, of temperature and salinity. As T, S characteristics change, d, and f3 slowly vary in response.
This causes a "drifting" of the electrical zero reference point. Since this
"drift" is not accurately known, relatively frequent 180° turns must be
executed ("zero fix" turns), in order to keep a careful watch on the zero
reference point. A potential measurement is useless without a precise
specification of its reference point, since it is an essential difference that
is registered. A "floating" reference must be shrewdly monitored.
In most of what follows, the "drift" of electrical zero is recorded on
a plot with a surface temperature history. This provides a record of past
performance for future comparison. New electrodes and electrode case
design are now being developed and experimented with in the attempt to
control within small tolerances the "drift" of the inherent electrode potentials. If this can be done, frequent "zero fix" turns can be eliminated-a
significant savings and an advance in this method of current measurement.
Theoretical interpretive technique is not contained formally in this
report, but is being studied and will be presented separately. Research on
basic method improvement while at the same time developing a workable,
permanent, and readily available system to produce desired results for such
theoretical examination as well as for compilation of descriptive data is the
motivating goal of what follows.
8
CRUISE REPORTS
/28 °N
/27°
126°
125°
124°N
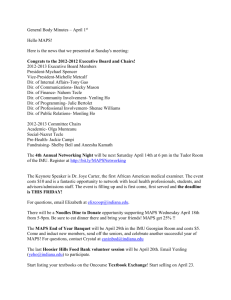
Figure 2
The indicated line shows the location in which the GEK measurements
compiled herein were taken. In the following reports "NH" refers to
Newport Hydro, "NR" to Newport Return, and the numbers following
nations to the miles offshore from Newport as indicated
9
CRUISE 6 704*
Objectives
To become familiar with techniques of handling and operating GEK
equipment.
To learn particulars involved in translating raw results to oceanographic parameters.
Equipment Employment
The GEK recorder was used in the dry lab with the connecting cable led
out through the wire input port. The spool holding the cable with electrodes
was mounted on the boat deck. The electrode cable was towed off the port
side by feeding it through a block mounted on the Daybrook Crane. A boathook was used to pull in the last electrode when removing the cable from the
water. When not in use the cable was secured while still threaded through
the block. Electrodes were payed out and retrieved by hand with the ship
cruising at half speed (5 knots). This system worked quite well. On the
tows between stations about 100 meters of cable separated the nearest electrode and the ship.
Operation Schedule
The electrodes were towed on the surface at full speed (10 knots), and
were brought in before the ship stopped at a hydro station. All recordings
were made in deep water. Tows were made between the following stations:
NH 55 - NH 63
NH 65 - NH 83
NH 105 - NH 125
NH 125 - NH 145
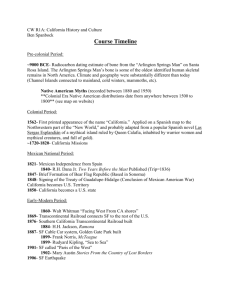
Turns were made on each leg to find electrical zero. The results are presented in Figure 3.
*Note: In all cruise number designations, the first two digits refer to the
year, the second two to the month of the cruise.
LONGITUDE
127°
128°
125°
126°
I
Z 80
Li 60
■t 40
(f)
20
O
Q•
4 NOT MEASURED
0
20
g4i
4 0--
Ct
60
S
Figure 3
Cruise 6704
165
145
I
125
i
105
85
65
45
NAUTICAL M/LES FROM NEWPORT ALONG LATITUDE 44° 39.1'
25
11
CRUISE 6705
Objectives
To obtain a continuous profile of currents along a line of constant
latitude for 165 miles off Depoe Bay, Oregon.
Equipment Employment
The recorder, electrodes and cable, and auxiliary equipment were
deployed in the same manner as on the previous cruise.
Operation Schedule
The electrodes were towed full speed (10 knots) at the surface on the
return trip to the coast. A continuous record was obtained with electrical
zero fix turns executed periodically along the way. The electrodes were
retrieved approximately 20 miles off Newport due to signal masking by
shallow water effects. Results are depicted in Figure 4.
LONGITUDE
I 27 °
I 28 °
I
I
125°
126°
rt\
0—
N
Figure 4
Cruise 6705.
1
165
145
I25
105
85
65
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° .39./'
I
25
a
13
CRUISE 6706-A
Objectives
- To continue monitoring the currents of the constant latitude line
off Newport, Oregon.
- To examine the nature of the east-west currents along a short
constant line of longitude for a certain period of time.
- To begin a collection and correlation of data on electrical zero drift
and surface temperature profiles.
-
To record data on U. S. N. Hydrographic Office GEK log sheet.
Equipment Employment
The recorder, electrodes and cable, and auxiliary equipment were
deployed in the same manner as on the previous cruise.
Operation Schedule
A short run with ship speed of 10 knots was conducted along the Depoe
Bay line of buoys on the 2nd of June. On this run only one electrical zero
fix was executed at 1943 P. D. T. (Pacific Daylight Time)
On 3 June, a continuous measurement (10 knots speed) was attempted
as the ship sailed from NH 35 to NH 165. The procedure began at 0633,
but was interrupted at 1053 (near NH 75) due to the breakdown of electrodes.
Before this failure, three electrical zero fixes were performed. The
measurement was not resumed until 1800 (near NH 145). Two more zero
fixes were carried out before the ship speed was reduced to 5 knots to undertake a mid-water trawl at 2025.
The short haul back and forth trawling lasted until early morning of
4 June. Seven zero fixes were executed during this time.*
Returning from NH 165 to Newport, GEK measurements were carried
out while the ship was sailing between stations. The electrodes were pulled
back to the ship when stopped on station. The numerical results indicated
in Table 1 have been graphically depicted in Figures 6 and 7 along with the
recorded surface temperature.
*Note on presentation of this data in Figure 5: the linear variation
between accurate fix vectors is a crude approximation.
TABLE 1
CABLE S - SHORT
OCEANOGRAPHIC LOG SHEET - GEK
PINC-b113 3167.7 (Rms. S-55)
YAO NENG-CHUM
67
6706-A
YAQUINA
R V
SE.' Sly algebraic signs and units
Consult H.O.
Chart No.
11112
of
tor ,ocal
....a ..
Month)
ant electrode should be connected to the POSITIVE input terminel.
. z ... --.
SHIP'S
AVERAGE
EED
GEKSP
HOUR
DATE
LONGITUDE
L ATITUDE
Day,
signal vector, and the more d
ell measurements. In northern magnetic hemisphere: The current velocity vector lies 9E° to the RIGHT of the resultant e ec
value of nearest standard Iso ynamia line.
recorder scale
POSITION OF
CURRENT FIX
SERIA L
NO.
CHECKED BY
COMPUTED BY
TKETIC ELECTRO .
IN'EPG17= 0
.15E
VESSEL
ELECTROMAGNETIC CURRENT OBSERVATIONS A'
U.S. NAVY HYDROGRAPHIC OFFICE
WASHINGTON 25, D.C.
CURRENT
VELOCITY
DEPTH
OF
EQUATIONS
WATER
(GMT)
(E
N or S)
.
or
..
TAND
SG
DR
—
°T
1
0
°T)
9
H (XI r
XI
2
25
0.500
2 June 67
1941 44521
3 June 67
0633 44.38.7' 12458.7 110
4
3 June 67
1804 44'38.1'0500 5
3 June 67
2000 44°38.8 1 127°45.9'
3 June 67
10
I1
10
1
2137 4411.1
319
+ 520 -15
260
-10
El 345
2239 44538.6'
3 June 67
0 E
2343 4410.9'
9
4 June 67
0045 44538.4
10
4 June 67
0151 44°40,6'
0.500
- 7
-
+ 7
-
-15
-
8
0500
i
11
4 June 67
0255 44°37.4'
I
12
4 June 67
0407 44'39.0'
I
13
4 June 67
1005 44940.1'
•
14
4 June 67
1357 44°39.2'
E
11.1111.111110
26.5_
12
17
5 June 67
1016 44539.6'
•
+ 32
18
5 June 67
1120 44°39.6'126°112' E
19
5 June 67
1505 44°38.8'125°46.4'
5 June 67
2108 44°39.0'125°333'0.50 +15
270
06661111
20
-30 090
0,767 188
June 67
0025 44°392'125°29.1'
23
6 June 67
0123 44.38.9'125°24.3' m;:---
MI
0900.415
-17 000
_
-••
t — I
-30 180 - 5 090
V
I
11
Ai
1
3a P/otitng
90 .
on
XV
Mark
Board
1.04 . 1/11
XVI
01
9a
XV
I
)(Ix
XVII 0 90.
if II >0
MAR
230
241
RI
230
MI 180
-26 090
....
computed
OE 258
90
-33 o90
5
be
A
XIII -
225
+20
6
If
MI
I
050
XI/I -
IMI
839 44°39.2'
+17
0,
236 XXI 1.ifx;11
0
II - <"1
OE 259
27
DS
XVII . XIII + A
/f XIII + 90' . XV
'XVII =
XIX - XVIII
4 June 67
22
. if Y S 0
XI I
I
. X/V/XII
243 xx = .
16
2220 44°39.1 125°39.8'
I
185
+17
1 727 44539.6
240
4 June 67
5 June 67
if Y 0
± 180
'May
0225 283
-
15
21
1 = III
tang
+ 70 -14
3 June 67
7
XI
25
XV . V if.VI.? vI
VI<RI
0.755 184 0 VI
- 5
XI V
•
4XII
238
+120.691
-17.5
0500
0907 44 38.9' 125'272'
II)
119
0.504 1 9 5 x
0
0500 230 xVv
3 June 67
VI
(IV + X
Y
X
260
3
6
176
115
A CI - A
IZ
C
IIllIMMIR
i
TUN/
W
245
XYZ
-------
15
TABLE 1 LEGEND
Column
Units
Pacific Daylight Time (PDT)
Latitude, North
C
Longitude, West
D
knots
E
fathoms
F and G
millioersteds
H, J, L, N,
R, T, V, Z
degrees true
I, K, M, 0,
P, Q, S, V, X
W
centimeters/second
non-dimensional signal multiplier
knots
16
Figure 5
Cruise 6706-A. GEK measurements during mid-water trawl.
I
40
T
1
20
0
(/) 40
3
20
tr)
O
0
40
20
0
40
20
L41
0
Ct 40
•-■
C/)
20
0
40
20
0
44° 37'
44°40'
4 4°39'
4 4° 38'
LATITUDE ALONG LONGITUDE /27° 55'
1
44° 41
--
Ft
128°
127°
LONGITUDE
126°
125°
80
60 -
4040--
0
20 -
F'
40-- N
60
S
Figure 6
80
11#,Iffil1
165
145
125
tifi1ill
105
85
Cruise 6706-A, Newport return run.
ilitiliiili
65
25
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39.11
-..
ILI
(/)
•.
.....
I 27°
I
128°
I
80....
.. .. .. . • ..
LONGITUDE
125 °
I
_
- -, .-
/
-.0, .....,.....-- .----.
1: 6:
60
40 -
20
20
40-
60
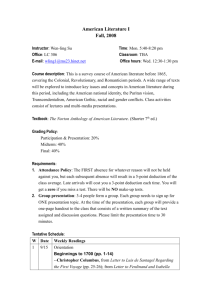
Figure 7
Cruise 6706-A. Newport return run.
80
I
I
I
I►
I
65
,
I
45
85
105
125
145
165
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39.1'
I
25
19
CRUISE 6708-A
Objectives
-
To deploy logistically two sets of electrodes on two separate cables.
-
To test the characteristics of different cable arrangements.
-
To continue gathering data on the continuous run from NH 165 to
Newport, Oregon (using Hydrographic Office Log Sheet).
- To continue gathering data on electrical zero drift as related to
surface temperature.
Equipment Employment
Two sets of newly manufacture neutrally buoyant GEK cables were
tested on this cruise. One cable is 200 meters long, and the other is 250
meters with an elctrode positioned at the end of each cable. They are
referred to as the short and long cables, respectively (inter-electrode
distance on both cables is 100 meters). A 20-foot 3/8-inch manila line
was attached to the outboard electrode of each cable. Both cables were
connected to the GEK recorder through an electronic differential summation
circuit, built especially for this purpose. A simplified equivalent circuit
diagram of this device is shown in Figure 8. With appropriate connections
the signals between any pairs of electrodes in the array can be added or
subtracted by means of an operational amplifier. In addition a bias voltage
of selected polarity and magnitude can be added to one input to adjust its
value relative to the other signal. In this manner any electrode pair can be
compared within a range of magnitudes at any time. Selection was facilitated
by toggle switches on the face of the instrument. The two cables were towed
side by side from the fantail of the ship. The recorder was lashed down in
the aft lab. Figure 9 shows the cables under tow, and Figure 10 shows the
recorder as it was used with the summation device.
The recorded trace of the potential difference during a GEK measurement ideally would be a smooth well-behaved curve with time. The actual
record is oscillatory, exhibiting large noise spikes which may be due to
wave action, magnetic fluctuations, and other local variables, as well as the
constant corrections made to keep the ship on a mean course. The signal is
usually filtered with a resistance-capacitance low-band pass filter to limit
the noise to signal ratio. This filter introduces some time constant and the
recorder system becomes somewhat sluggish in response to the actual
electrical field. Since movement is through the field at a significant rate,
20
Figure 8
Simplified schematic of circuit used
for signal summation and selection.
21
Figure
9
Two neutrally buoyant GEK cables simultaneously under tow
from the fantail of the R/V YAQUINA.
22
Figure
10
GEK Recorder and electronic summation circuit box as
used in the aft
lab of R/V YAQUINA.
23
any sluggishness in recording at one point may be recorded as the actual
signal present as the system is now reacting to the next point in the field.
Any damping time constant may prevent system equilibration at true field
values. The overall result may be a somewhat distorted record.
The attempt in this experiment was to eliminate some of the signal
noise due to wave action by superimposing signals from two electrodes
appropriately spaced so that their noise components would be destructively
out of phase. The results seem to be somewhat ambiguous due to a too
brief record, not enough trial spacings, and perhaps some misunderstanding
on the design and use of the differential amplifier circuit. Nevertheless,
enough positive responses were exhibited to warrant a planned repetition of
this idea with the necessary oversights corrected. Some of the more interesting results are presented here.
Operation Schedule
A.
The experiment was initiated at 2330 PDT 10 August and continued
until 0315 PDT 11 August. During this period several different connections of the electrodes were employed to test the possibility of
supressing the signal noise.
1. From 2352 PDT 10 August to 0000 PDT 11 August, the outboard end electrodes of both cables were connected directly to the
recorder as a pair of GEK electrodes --a 50-meter distance between
them. The signal oscillations showed a slightly larger magnitude
than that recorded by the two electrodes on one cable (100-meter
spacing),
2. Next, the two inboard end electrodes were summed together
to act as one lead of the input signal, and similarly the two outboard
electrodes. The signals so obtained were recorded for 55 minutes.
The general magnitude of the signal oscillation increased noticeably.
A definable beat frequency with period of approximately one-half
minute showed up on the recorded trace. This beat frequency was
very close to the oscillation of the ship's heading as effected by the
auto-pilot gear. A shift to manual control of the rudder made the
period of the beat frequency change into a slightly irregular pattern.
Figure 12 gives a record of this data.
3. At 0130 PDT 11 August, the electrode connections were
switched to inputs from the electrodes on each individual cable.
Signals from both cables were summed and sent into the GEK recorder.
An even larger signal oscillation appeared (roughly 30 cm/sec, average).
At 0148 PDT 11 August, the long cable was pulled in 25 meters.
Thus, the distances between the two outboard electrodes and the two
inboard electrodes were both 25 meters, and the distance between the
outboard electrode of the short cable and the inboard electrode of the
long cable was 50 meters. The magnitude of the signal oscillation
remained about the same as before. Refer to Figure 13.
24
4. A further change of relative cable length was made by letting
out the long cable to full length and pulling in the short cable 25 meters.
This arrangement gave a 25 meter distance between the inboard electrode of the long cable and the outboard electrode of the short cable.
The magnitude of signal oscillation reduced to about 0. 15 millevolts.
Further measurements with the filter resistance set at 4 and 10
(dimensionless dial settings) were carried out. The magnitude of the
signal oscillation was thus reduced to a substantial extent. See Figure 14.
B.
Continuous GEK measurement.
A continuous GEK measurement with the long cable was carried out
from 2320 PDT 11 August to 1000 PDT 12 August. Eight GEK current
fixes were obtained along the NH line from approximately NH 115 to
NH 35. The fact that seven out of the eight zero fixes yielded north
bound current components contrary to the general current trend off
Oregon this time of year and to the observed ship's drift indicated that
some reversed connection existed in the cable leads, Therefore, in
compiling the Log sheet, all signal directions were shifted 180, from
those on the recorder chart to facilitate consistency with the general
current condition in this area. Electrical zero, surface temperature,
and north-south current components are plotted in Figures 15 and 16
from the results tabulated in Table 2.
25
Figure 11
Signal recorded using various combinations
of electrodes. For details refer to Operation
Schedule, section Al,
26
Figure 12
Signals recorded with electrode configuration
shown and other variables modified as _indicated.
For details refer to Operation Schedule, section AZ.
27
Figure 13
Signals received with various electrode spacings.
Details are contained in Operations Schedule,
section A3.
28
Figure 14
Signal received with electrode spacing shown subjected
to various filter resistances. Refer to Operation Schedule,
section A4.
TABLE 2
OCEANOGRAPHIC LOG SHEET - GEN
PRISC-11-103167/7 (Reg 5-55)
CRUISE
R/V YAQUINA
TI
6708-A
COMPUTED
U.S. NARY WYDROGRABHIC OFFICE
WASHINGTON 25, D.C.
BY
YAO, NENG-CHUN
ELECTROMAGNETIC CURRENT OBSERVATIONS
For use 1.4. H.O. Pub. No. 607
CHECKED it
Specify algebraic signs and units of all measuremen t s. In northern magne t
i hemisphere: The current velocity vector li s 90° to the BIGHT of
Consult H.O. Chart No. 1702 for local value of H . end set recorder s ale to value of
the resultant electric signal ector, and the more distant electrode should be connected to the POSITIVE inp
nearest standard isodynamic line.
POSITION OF
CURRENT FIX
GEN
DATE
SERIAL
(Day, Month)
lBaY,
NO .
1
HOUR
(GMT)
LATITUDE
LONGITUDE
(N or X)
(E or W)
SHIP'S
AVERAGE
SPEED
I(
11 Aug 67 2230
44°39.0' 126.15.0'
5
1
DEPTH
OF
WATER
,
•
(..,fe.)
VERTICAL
MAGNETIC
INTENSITY
ST AN D
°.
INITIAL
FIRST
FIX.COURSE
SECOND
FIX-COURSE
RESUMED
BASE-COURSE
SIG.
DIR.
SIG.
DIR.
SIG.
DIR.
•i:'.
IV
(''',
V
VI
('T)
VII
.Z.VI/I
('',
IX
180
18
000
BASE-COURSE
LOCAL (°T
III
1
090
8
20
2
12 Aug 67 0030
44 385
126°33.2'
1
090
18
180
-12
000
42
3
12 Aug 67 0130
14°383' 126°24.1'
1
090 58
180
38
000
8
12 Aug 67 0230
44385' 126°13.3'
5
12 Aug 67 0330
44385' 126404.8'
1
1
6
12 Aug 67 0430
44°38.8' 125'54.5'
1
4
.
.f:.
SIG.
090
CORRECTION
TO
S
STANDARD
ISODYNAMIC
LINEE
CURRENT
VELOCITY
,
sSPEE
0,R.
DIR.
MAG.
DIR.
MAG.
DIR.
X
(°T)
'..-::
XIV
(°,)
XV
s7;.
or.i,;„,,,,
..,7
p,„0,,
XVI
CRI
XVII
XVIII
XIX
X
12
19
9
270
9
277
1
9
007
28.2 164
1
282
254
157
XII
XII/
1
000
090 38
15
8
090
27
180
090
60
23
36
090
15
000
XI = N (VI + V
39
067
1
39
180
72
000
-18
090 38
27
9
090
45
000
46
012
1
46
102
090 32
180
55
000 -25
090 38
15
20
090
40
000
45
025
1
45
115
090 46
180
62
000 -10
090 38
28
14
090
34
000
37
022
1
37
108
44°38.6' 125 14.4'
10
090 40
180
60
000 -20
090 50
44°38.2' 125°21.1'
10
087
5
180
- 2
000 - 2
090
090 22
180
27
000 . -25
090 3
12
20
-
25
EQUATIONS
XXI
(°)
090 32
12 Aug 67 0530
10
RESULTANT
SIGNAL
VECTOR
7,
12 Aug 67 0730
44°37.7' 124°51.0'
AVERAGE
FIX-COURSE
SIGNAL
MAG.
8
12 Aug 67 1000
AVERAGE
BASE-COURSE
SIGNAL
-...
XI
7
9
ZERO
POINT
nal.
=
/
=;; (iv 0x) - XI
XII
11'1
Y
r 0
un
III if 7 > o
o = III T 180" if Y s 0
)(Iv = iv - xi
XV = V
I.
V7i7
or . VII if VI < VIII
0 xvi = Jx& 0 xu
CanA = XW/XII
090
40
000
47
030
1
47
120
2
10.5 090
0
000
105
090
1
10.5
180
1
28.5 090
28
180
40
135
40
225
XVII = UT/ + A
If XI// + 90' = XV
XVII = XIII - A
If XIII - 90° . XV
'May be computed on Mark
3a Plotting Board
XVIII = 1.04 x l//I
XIX = XVIII x XVI
XX . .0194 x XIX
XXI = XVII + 90'
if II 0 0
XXI = XVII - 90'
if II < 0
A
B
C•D•EFGH
I
JK
L MNOPQRSTUV
w
xY
7
---
DM) PRSE, WA
IV
to
30
TABLE 2 LEGEND
Column
Units
A
Pacific Daylight Time (PDT)
B
Latitude, North
C
Longitude, West
D
knots
fathoms
F and G
millioersteds
H, J, L, N,
R, T, V, Z
degrees true
I, K, M, 0, P
Q; S, V, X
W
centimeters/second
non-dimensional signal multiplier
knots
128°
LONGITUDE
I27°
126°
125°
80
60
40
Cf)
Zt
20
40--
60
Figure 15
0 80
Cruise 6708-A. Newport return run.
I
165
.
.
.
1,
145
I
I25
1
I
105
„
.
I
85
.
.
.
I
65
,I
.
■
1
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39./1
I
25
I 27 °
I 28 °
LONGITUDE
125°
1
126°
80 —
60
40
NIL %
•••
••■
—
20
1.2
La
c
20
40—
N
60 —
Figure
16
Cruise 6708 Newport Return Run
80
165
a
145
NAUTICAL
125105
MILES FROM NEWPORT
85
ALONG
ail
65
a
LATITUDE
la
45
44° 39.1
la
25
33
CRUISE 6708-D
Objectives
- To use both cables again for GEK measurements, employing a
newly overhauled electronic comparator circuit with a built-in biasing
voltage and polarity inversion.
- To repeat previous experiments on variations of the electrode
inter -distance s.
- To continue gathering data on currents measured from NH 165 to
Newport, Oregon.
- Jo continue data collection on electrical zero drift and surface
temperature measurements.
Equipment Employment
The cables, recorder, and electronic circuits were set up in an
exactly similar manner as on the previous cruise. The polarity inversion
within the overhauled mixer solved the problem of the sign reversal experienced and mentioned in the last cruise results.
Operation Schedule
A.
Experiments on track west.
At 0015 PDT of August 30, the long cable was payed out overboard to check the cable leads and to test the new electronic bias
voltage adjustment. The voltage range was found to be a p
proximately
0. 60 millevolts. The cable was retrieved at 0200 PDT 30 August
before arrival at NH 65.
Again the next day at NH 85, both cables were payed out at 1110
PDT 31 August. Differences occurred between the signal magnitudes
from each cable. A successful test of the bias circuit adjustment
d
emonstrated, however, that the signals could be equalized by this
means. No significant suppression of wave signal noise could be
observed over those presented in the results of the previous cruise.
The cables were pulled aboard at 13 15 PDT on the same day.
B.
Experiments on track east.
A continuous GEK measurement was obtained from 1012 PDT
31 August while sailing to Newport from NH 165. Fifteen zero fixes
were obtained, using the signal received from the long cable. Surface
te
mperatures, electrical zeros, and north-south components are
plotted in Figures 17 and 18 from numerical results listed in Table 3.
34
Various experiments were also conducted between fixes. The
different cable lengths and electrode connections executed on Cruise
6708-A were repeated between 1930 PDT 31 August and 2135 31 August
with similar results. One obvious difference, however, was that no
significant beat frequency due to the oscillation of the ship's heading
appeared in this two-hour experiment.
TABLE 3
OCEANOGRAPHIC LOG SHEET - GEK
PRC-1.103167/7(Ers. 5-559
U.S. NAVY HYDROGRAPHIC OFFICE
WASHINGTON 25, D.C.
VESSEL
12/V YAQUINA
6708-D
COMPUTED BY
1967
YAO NENG-CHUN
Specify algebraic signs and units of all measurements. In northern magne t i hemisphere, The current vel city vector li s 90° to the
RIGHT
Consult 11.0. Chart No. 1702 for local value of H z and set recorder scale to value of nearest standard iso ynamic line.
POSIT ON OF
CURRENT FIX
GEK
DATE
SSERIAL , _„,
(Day, Month )
NO.
HOUR
(SAT)
LATITUDE
(L) Aug 31
2 (S) Aug 31
3 (L) Aug 31
LONGITUDE
,
(Pi nr B)
1
DEPTH
SHIP'S
AVERAGE
OF
SPEED
WATER
(E
or
..
W)
(...f..)
VERTICAL
MAGNET I C
INTENSITY
I TY
ALAN ° . LOCAL
/
II
INITIAL
BASE- COURSE
of
the resultant electric signal vector, and the more distant electrode should be connected to the POSITIVE input terminal.
F I ST
F IX-COURSE
SECOND
RESUMED
FIX-COURSE BASE -COURSE
DIR.
SIG.
DIR.
SIG.
DI R.
SIG.
DIR.
.e.
, 'A,
SIG.
C'TO
.;.',.t
''''''
.'-e
VIII
(°r)
'. 't:
III
IV
V
VI
VII
IX
X
1035
44 .11.3'127 .15.0'
1
1145
44°41.6'127°32.3'
10
390
5
000
15
180 -10
090 -20
1
390
0
180
65
000
5
090 - 5
1245
44°39.5'127'21.0'
390
37
000
5
180
ELECTROMAGNETIC CURRENT OBSERVATIONS
Bur use .,th H.O. Pub. n,. 607
CHECKED BY
37 . 090
ZERO
POINT
iF
'i.
XI
25
21
AVERAGE
BASE-COURSE
SIGNAL
GNAL
AVERAGE
FIX-COURSE
SIGNAL
RESULTANT
SIGNAL
VECTOR
MAG.
DI R.
MAG.
DIR.
MAG.
.-.;.
XII
( '7)
.
(°T)
s'.::
DIR.
(°T)
XVI
XVII
XIII
10
090
XIV
16
XV
180
20
CORRECT ION
TO
STANDARD
I SODYM
NA I C
L I NE
, ,P,,,,)
M,
XVIII
149
CURRENT
VELOCITY
SPEED
DIR.
- . t(0..
to)
XIX
XX
(°r
1
EQUAT ION S
XXI
XI ° X (V/ + VIII)
20
239
XI
V;
r + X)
liri
270 35
000
37
43
1
37
073
35
37.5 270 30
180
48 230
1
48
320
- XI
xm 0 111 OV DOX
or = III ± 180° if Y
010 = M - xil
XV = V 11AVI,2 VIII
or = VII if VI f VIII
5 10
4 (L) Aug 31
1345
44°39.5' 127'09.7'
1
090
20
000
75
180
5
090
30
40
15
270 35
000
38 337
1
38
067
5
(L) Aug 31
1445
44°39.9' 126'58.6'
1
390
112
180
40
000
30
090
110
35
76
090
5
180
76 194
6
(L) Aug 31
1
76
1545
184
44°39.8'126 .18.0'
10
090
72
180
35
000
35
090
72
35
37
090
0
180
37 190
1
37
180
1645
44°39.7' 126°38.8'
1
090
90
180
97
000
20
090
70
34
46
090 63
180
84 146
1
84
236
163
1
1391
253
88 162
1
88
252
1
101
210
12
215
35
252
"1 = nri 1 , 0 0 9.
00
,
or
XXI . :(Vf11,-0900°
7 (L) Aug 31
• xvi = Jx& . x1v 2
AcanA . XIV/XII
+A
XIII
If XIII A 90' = XV
or
• XV/I = XIII - A
If XI/I - 90' = XV
XVII
8 (L) Aug 31
1745
44°39.4' 126°25.7'
1
090
75
180
150
000 -110
090
90
35
47.5 090 115
180
9
1845
44 039.2'126°12.7 1
10
090
62
180
125
000 -75
090
50
25
31
180
(L) Aug 3
S 0
10(B) Aug 31
1945
44°39.7' 126'02.1'
10
090
65
180
25
000 -75090
60
-25
11(L) Aug 31
2045
44°392' 12551.8'
10
090
50
180
65
000
45
090
45
55
67
090 94
87.5 090 50
7
270 10
12L) Aut 31
2145
44 038.9' 125°39,8'
10
090
80
180
100
000
35
090
75
13 L Au• 31
2245
44°3 . 2' 125°276'
10
0'0
60
180
50
000
75
0• 1
1
14(L) Aug 31
2345
44°39.2' 125°15.0'
10
090
75
180
55
000
0.0
80
66 . 11
0
15(L) Sept 1
0045
44°39.8' 125'03.8'
1
0 • 0
70
180
75
000
75
60
090
6
10.5 090 33
25 1 • 1
12.
180 101
120
180
19
12
180
35 162
ill
0
15
139
180
3s
1
3
6 015
144
1
, 6
132
1
21
234
computed on
Mark
Plotting Board
XVIII = 1.04 x //II
X
3 1
21
•
'May be
XX
.
XVIII x XVI
.0194 x X/X
AR
1. Continuous GEE
mea. until 1845.
2. D
. cables length
trialed out 1920 to
2145 between currE
fix.
A
BC
D
EFGHI
JKLMNOPQRsTuv
w
X
Y
7
...„...0_..
4.1
0
36
TABLE 3 LEGEND
Column
Units
Pacific Daylight Time (PDT)
B
Latitude, North
C
Longitude, West
D
knots
fathoms
F and G
millioersteds
H, J, L, N,
R, T, V, Z
degrees true
I, K, M, 0, P,
(2, S, V, X
W
centimeters/second
non-dimensional multiplier
knots
I 28 °
I 27 °
LONGITUDE
I26°
I25°
ct 80—
?) 60-
40 —
•
Ci)
L4.1
20
4.
0
Z.%)
IZ°
20 —
114
40—
60
Figure 17
165
I
145
111111111.
I 25
105
85
Cruise 6708-D. Newport return run.
'II
65
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39./'
25
LONGITUDE
127°
128°
r......._......
•,
.. , 4,...
,
% l,
i
125°
126°
20
NyA0....1\
19
i
I
I
I ,
18
►-e
I
CC 60
I
17
N
•
I6 (1)
40
I5 P.
OC
•
14
20
1
13 t
12 %1
14.1
0
11
1=-
111
10
20
0
CC
O
CC
0- N
•
,42
60
Figure 18
—4
Cruise 6708-D
80
165
I
145
1
I25
105
85
65
Newport Return Run
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39.1'
I
25
39
CRUISE 6710-B
Objective s
- To compare GEK measurements by using the two previous cables,
towed simultaneously, and each feeding separately into an independent
recorder.
- To continue to gather GEK current measurements along the Newport
Hydro line.
- To continue to obtain data on electrical zero drift and surface
temperature conditions.
Equipment Employment
Two Leeds and Northrup strip chart recorders were lashed down in
the aft lab at the start of this cruise. One recorder was specifically
designed for GEK use and so-modified electronically. The other was a
stock potentiometric recorder with a 20 m y scale capability and no special
internal adaptations. The two cables were streamed aft to their full lengths
in the same manner as the previous experiments. The electronic junction
box was not used as a summation device, but merely employed as a straight
switching device to facilitate cable selection.
Operation Schedule
All GEK measurements were taken on the track east from NH 165 to
Newport. After all equipment had been set up and the cables streamed,
each cable was connected separately to each recorder. At this time we
noticed that the stock recorder had an extremely fast chart speed which could
not be properly adjusted. If kept in continuous operation for GEK measurements, it would deplete the available supply of chart paper and produce well
spread out and hard to average results. Thus an immediate change in plans
had to be adapted. We still desired to obtain and compare the separate
signals from each cable. With only one recorder to work with, the maneuvering scheme shown in Figure 19 was adopted. Selection of signals was facilitated by the junction box used only as a switch.
The reason for the five minute run of unfiltered signal was to monitor
any effect the filter's time constant might have exhibited in changing the
average signal value.
Surface temperature, electrical zero, and current components for each
cable are graphed in Figures 20, 21, 22, and 23. Tables 4 and 5 list the
numerical values represented by these figures.
REPEAT FROM (A)
40
S1-10R T
SHORT
LO NG
SHORT
LON G
LONG n1
LONG
}SHORT
RUN SHORT CABLE
RUN UNFILTERED SIGNAL
3 MINUTES
75 MINUTES
-7
/
,. RUN LONG CABLE
. .-/ . ....--30 MINUTES'
.. .
•
..
'.r . . -
,
LONG
SHORT }SHOR T
LON G
>
k
SHORT
LONG
LONG
RUN LONG CABLE
<
RUN UNFILTERED SIGNAL
5 MINUTES
,,
;). 75 MINUTES
/
7
/
x
,..
x
x
RUN SHORT CABLE
30 MINUTES
(A)
z
sc*-/-
Figure 19
Cruise plan adopted to compare
signals from both cables on one
recorder.
CABLE L - LONG
TABLE 4
OCEANOGRAPHIC LOG SHEET - GEN
PC-MO 3167/7
S-SS)
VESSEL
U.S. NAVY HYDROGRAPHIC OFFICE
WASHINGTON 25, D.C.
CRUISE
R/V YAQUINA
6710-B
""-
196 7
COMPUTED BY
ELECTROMAGNETIC CURRENT OBSERVATIONS
Far us. vteh N.O. Aub. No. 607
CHECKED BY
CURTIN, T. B.
,,,,of
Specify a Igebraic signs and
al/ measurements. /n northern magnet, hemisphere: The
,I ,,1 city vector lies 90" to the RIGHT of
Consult H.O. Chart No. 17 02 for local v•lue of H z and set recorder s ale to value of neare t standard isodynamie
line.
POSITION OF
RREN T FIX
CU
GEK
SERIAL
NO.
(Da
y
DATE
,
Month )
HOU
(GMT)
LATITUDE
LONGI
TUDE
SHIPS DEPTH
AVER AGE
OF
SP E E D WATER
,
(N
or S)
(E
,..„..,
or W)
VERTICAL
MAGNET IC
,,•o
IINTENSITY
nS., ,I ,Td,,
Y
INITIAL
BASE COURSE
RUSE-COURS
SECOND
F I X-COURSE
RESUMED
BASE-COURSE
DIR,
SIG.
DIR.
SIG.
LOCAL
DIR.
SIG.
1°,8
DIR.
7,*
I
III
IV
(`,1
L't
II
('VI
(°T)
VII
.fz.
VIII
270
8
18 Oct 67
2135
44°38.5' 127°11.5'
10
--
•3
2
18 Oct 67
2331
44°39.3' 12650.1'
10
--
1.5001.500
3
19 Oct 67
0130
44 040.0' 126°30.0'
10
--
1.5001,500
001.500
E
180 20
- - - 180
12
resul tent electric signal ector, and the more distant
FIRST
FIX-COURSE
STAND.
1
the
V
270
El
8
ZERO
POINT
SIG.
-.
.1
IX
X
X/
180
7
+25
AVERAGE
BASE-COURSE
S I GNAL
AVERAGE
FIX-COURSE
S I GNAL
RESULTANT
S I GOAL
VECTOR
MAG.
DIR.
MAG.
DIR.
MAG.
DIR.
,-.,7,.
(°,1
i'
(S)
"e7
(°,)
XII
XIII
XIV
XV
XVI
XVII
,/.rod,
should be connected to the POSITIVE input terminal.
CORRECTION
TO
STANDARD
I SODYNAM I C
LINE
CURRENT
VELOC I TY
SPEED
,Iet)
(fool.)
(°,)
XVIII
SIX
XX
Sol
XI =34(vr + vm)
= II uv + x) - XI
= irl
13.5 180°
090
8
090
8
180
12
+20
12.0 180°
090
16
090
16
180
12
+ 9
12.0 180°
090 31
180
24
+
9
24.0 180°
EQUAT
EQUATIONS
DIR.
(Multiplier
Y
XII
XIII = III
or = III i
xtv
if V 1 0
180° if V <
4
19 Oct 67
0330
44 038.9 1 125°57.3'
10
--
5
19 Oct 67
0530
44°38,9' 125°46.8'
10
--
1.5001.500
180
2
090 48
090 48
180
3L5 +11.5 16.
180°
•xvi = slxii' , xiv2
6
19 Oct 67
0 730
44°39.1' 12523.9'
10
--
1.5001.500
180 25
090 35
090 35
180
17
180°
•tanA
7
19 Oct 67
0930
44°39.1' 125°043'
10
--
15
8
19 Oct 67
1130
44°38.5' 124 440.7'
10
--
1.5001.500
9
19 Oct 67
1330
44°38.8' 124°22.8'
10
--
1.5001.500
.500
001.500
180 24
180
19
180 27.5
090 31
270
11
270 11
270 29
270 29
270 32.5
270 32.5
180
180
180
19
14
+ 2,5 21.0
-
1
XV = V if ,VI, 1 VIII
or = VII if vi
wir
-16
14.0 180°
32.5 180°
= xiv/xir
XVII = TX,II x/ HT, A+ 90, _
19.0 180°
37.5 -30
o
VI - XI I
or
XV
XVII = XIII - A
If XIII - 90' = XV
6 May
be computed on Mark
.30 Notting
XVIII =
/.04
Board
x I/II
XIS = XVIII x XVI
XX = .0194 x XIX
XXI = XVII . 90 °
if II > 0
or
XXI = XVII - 90 °
if II < 0
REMARKS
A
B
CD
EFGHI
JKLMNOPQRSTUV
W
X
Y
7
...-,
.0.
TABLE 5
OCEANOGRAPHIC LOG SHEET - GEN
PRNC-11H031674 (Rvv. SSW
VESSEL
cB5,.
6710-B
R/V
, ,„ , , .., _____ _
s igns
Consult H.O. Chart N.
SERIAL
S
NO.
LATITUDE
(A' or 5)
LONGITUDE
(T or
RI
1
18 Oct 67 2135
44°385' 127°11.5',
2
18 Oct 67 2331
44°39.3' 126'50.1'
SHIP'S
AVERAGE
SPEED
DEPTH
OF
WATER
VERTICAL
C
MAGNETIC
I NTENS I TY
(Mil
Kno ts,
1
loer
STAND
,
'') 7..1
--'--
--
10
--
10
I
INITIAL
BASE-COURSE
"ells)
DI R.
LOCAL
II
.
0.5001.500 180
4
19 Oct 67 0330
44°38.9' 125'57.3'
10
--
1.5001.500 180
--
1.5000.500
6
7
8
9
19 Oct 67 0730
19 Oct 67 0930
19 Oct 67 1130
19 Oct 67 1330
44, 39.1'
125°23.9'
44°39.1'125'035'
--
10
--
10
44°38.5'124°40.7'
10
44°38.8'124°22.8'
10
--
IX
X
180
1
1.5001.500 180
5*
10
7.5
6
ZERO
POI NT
-,f,'
-
1,0
AVERAGE
BASE-COURSE
S I GNAL
MAG.
DI R.
-1:t
XII
(° )
XIII
10
AVERAGE
FIX-COURSE
GNAL
SIGNAL
MG.
M.G.
T
XIV
DIR.
RESULTANT
SI GNAL
VECTOR
M.G..
DIR.
fur)
-,-*..
( '7)
XV
XVI
XVII
CORRECT ION
VELOC I TY
TO
STANDARD
I SODYNAM I C
I NE
N
(Mute
ipti..)
XV/II
EQUATIONS
DIR.
SPEED
Ts*7
q.v. )
XIX
XX
''
(',
XX
XI = A (VI A VIII)
1.80°
T = ll (IV
xi' - (II
A X)
180
7.5 + 2.5
7.5
180°
12
180
5',+ 5.0
5.0
180°
XIV
0
+ 5.0
7.5
090
or . III ± 180° if Y < 0
F. Iv/
-
xr1
090
12
090
20
090 20
180
5.0
180°
090
30
090 30
180 27.5 + 7.5 27.5
180°
'rang = XIV/XII
21.5
180°
'XVII . XIII
090
14
270
)500 '.500 180 55
270 20
180 16
14
+9
XV . V if.VI.2 VIII
or = VII if VI < VIII
•xvi -1)a1 2 + xiv2
A
A
If XIII
or
A PO"
-A
XIII m
X
= XV
19
180 34
+19
32 5
180 •
'XVII . XI TI
270 20
180 45
+35
50.0
180°
'gag be computed on Mark
+375 58.0
180°
270
19
)5000.500 180 31
- XI
XIII . III if Y 2 0
090
090
27
270
6
090
0.5001.500
--
10
VIII
V
10
125 ,16.8'
r7O
VII
IV
44°40.0' 126°30.0'
44°38.9'
..i-.:.
VI
III
19 Oct 67 0130
19 Oct 67 0530
Z7
l'7O
3
5
DIR.
S.G.
270
SIG.
SIG.
DIR.
CT)
1
RESUMED
BASE-COURSE
DIR.
CY1
SIG.
.,:-.
0.5001.500 180
SECOND
F I X -COURSE
FIRST
F I X -COURSE
c signal vector, and the more distant electrode should be connected to the POSITIVE input terminal.
RIGHT of the resultant ele
and units of ell measurements. In northern magnet), hemisphere: The current velocity vector lies 90° to the
a
n
..---...- -__ ,..
and set recorder s ale to value oi ....vv..
1702 for local value of fl
HOUR
(GMT)
A
:
1'67
YAQU1NA
POSITION OF
DATE
(Day, Month)
For
CHECKED BY
COMPUTED AY
SURFACE GEOMAGNETIC ELECTROA
KINETOGRAPH HO.
YEAR
CURRENT F I X
GEK
ELECTROMAGNETIC CURRENT OBSERVATIONS
use .,eh H.O. Putt. No. 607
U.S. NAVY NYDROGRAPNIC OFFICE
WASHINGTON 25, D.C.
If
90' = XV
3a Plotting Board
4.500.4500 180 50.5 270
XVIII = 1.04 x I/ II
XIX = XVIII x XVI
XX . .0194 x XIX
XXI . XVII A 90°
if II > 0
or
XXI . XVII - 90°
if II <0
REMARKS
*Signal exhibits wide
range oscillation he
Difficult to average,
I
■......_
111110."7
–
,
w.
.
a
I
Le
■a
fa
n o' n
0•
Q
•al
T U
V
W
X
Y Z
...,..
43
TABLE LEGEND ( Tables 4 and 5)
Column
Units
A
Pacific Daylight Time (PDT)
B
Latitude, North
C
Longitude, West
D
knots
E
fathoms
F and G
millioersteds
H, J, L, N,
R, T, V, Z,
degrees true
I, K, M, 0, P,
Q, S, V, X,
W
centimeters/second
non-dimensional signal multiplier
knots
LONGITUDE
127°
128°
I
125°
126°
I
Figure 20
Cruise 6710-B, short cable, Newport return run.
I
I
165
I
a
I
145
I
I
125
I
I
I
105
I
I
I
85
I
I
I
65
I
i
I
i
I
I
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39.11
I
25
I
LONGITUDE
I 28 °
ti
I 27 °
14,
I26°
I25°
80
6
•Aik
-9-
5
•-•
Ct 60
141
4
N
1--
40
CC
1--
0 20
Figure 21
80
I
165
lk .1
145
Cruise 6710-B, Short Cable, Newport Return Run
I
III!
I25
II,
105
I
85
I
65
I
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE . 44° 39./1
I
25
128°
ct
127°
LONGITUDE
126°
125°
80
60
40
Er)
Lu
O
20
0
20
Figure 22
Cruise 6710-B, long cable, Newport return run.
I I
„ I
1
25
45
65
85
105
125
145
1 65
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39.1'
ti
I 28 °
LONGITUDE
I 27 °
126°
I25°
(f)
C.)
CC
N
Lki
-
1
P)
80
—16
•
60
....•....'1.'"'•••••■■ • ft.,
—15
••
14
I3
40
I2
ni
20
0
4
(0
N
60
Figure 23
LlJ
Cruise 6710-B, Long Cable, Newport Return Run
80
1
165
.
145
.
I25
,
.
1
105
.
1
85
1
65
1
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39.1'
1
25
.
48
CRUISE - 6711
Objectives
-
To implement a new winch reel for the GEK cables and electrodes.
-
To initiate the use of new data recording sheets and bridge log sheets.
- To successfully compare GEK measurements by using the two cables
towed simultaneously, each feeding separately into the independent recorders
used previously.
- To obtain GEK measurements continuously for 24 hours over the
same 20 mile distance.
- To continue to gather GEK current measurements along the Newport
Hydro line.
- To continue to obtain data on electrical zero drift and surface
temperature conditions.
Equipment Employment
The two Leeds and Northrup recorders referred to in the previous
cruise were again lashed down in the aft lab at the start of this cruise. The
appropriate gears for slowing down the fast recorder had not been received;
however, a large supply of chart paper was obtained and the recorder was
able to run continuously for the required measurements. The setup is shown
in Figure 24.
The GEK cables with electrodes were spooled on a newly manufactured
reel, made to fit the shaft of the boat deck trawl winch. This spool was
brought on board via the mobile dock crane. Figure 25 shows the spool at
sea after the electrodes had been streamed.
Before departing on the cruise, various calibration tests were run on
both recorders by using signal generators, monitored with a dual input oscilloscope. Response to various input frequencies, input voltages and resistancecapacitance filter settings were recorded. This was done to facilitate
comparison of the data taken on the cruise. The most obvious difference
between recorders was determined to be a difference in scale. The standard
GEK recorder has a full scale deflection of 25 m y ., whereas the stock recorder
has a maximum full scale deflection of 20 m y . This difference had to be kept
in mind when analyzing the current magnitudes. Examples of the calibration
curves run are demonstrated in Figures 26 and 27.
49
Figure 24
The two recorders employed on the R/V YAQUINA to simultaneously
record the signals from two separate GEK cables.
50
Figure 25
GEK cable spool mounted on shaft of deep-sea
trawl winch during operations.
(MV) 21,0
1
51
-I
1.0
I
-I
0
I
1.0
i
I
2.0
VERTICAL INTENSITY: 0.5 OERS.
1-" MV SIGNAL MULTIPLIER : 1.05
2.5 mv. , TRIANGULAR WAVE INPUT
,
5.0 MV.
10.0 MV.
•
V.
20.0 MV.
FILTER : 8.0
FILTER:4.0
FILTER: 6.0
FILTER : 4. 0
FILTER: 2.0
FILTER : 0.0 . 05 CYCLE S/ SEC.
4
0
FILTER : 8.0
a.
--.-
>
2
FILTER : 6.0
F-
-.J
0
.J
-.1
JFILTER : 4.0
0
N
.2.0
(MV )
I FILTER : 2. 0
FILTER : 0.0
1.0
0
CYCLES/SEC.
1.0
2.0
Figure 26. An example of some responses of the "GEK recorder" to various input signals.
Refer to the text for details.
15.0 MILLEVOLTS OM PEAK TO PEAK
FILTER. 0.0
01 CYCLES/ SEC.
0
7
71
I
0
0-
o
<
eo
■
Figure 27.
Examples of some responses of the unmodified recorder to various
input signals. Note expanded scale due to faster "chart speed.
53
The filter used on the stock recorder during these tests and on board
ship was a low band pass R-C network consisting of a 1000 mfd. capacitor
and a 2500 ohm resistor.
Operation Schedule
During the westward leg on the Newport Hydro line, hydrographic
operations had to be suspended at NH 65 due to the onset of rough weather.
It was decided to undertake the 24 hour GEK measurement at this time.
Generally speaking, the weather was stormy during the entire cruise (wind
speed averaged about 35 to 40 knots). Thus it may be propitious to examine
all the data with the windage correction factor being given some weight.
No correction was applied to the raw data presented here.
The cables were reeled out by using the boat deck winch. The new
system worked well, although three or four people are needed to guide the
two cables through the blocks and shackles. After the cables had been
streamed, the connecting electrical cable was hooked up, but the upper
cable jacks on the new reel were found to be faulty. These were eventually
by-passed and the proper connections made.
The cruising procedure followed during this 24-hour run is outlined
in Figure 28. This is followed by the bridge log (Table 6), and data sheets
which were newly implemented on this cruise (Tables 7 and 8). Following
these, the major results are graphed in Figures 29, 30, 31, and 32. A
crude periodicity is hinted at and indicated by the lettering in the margin
to the right of the grids.
Twenty-four hours later the weather had somewhat subsided and the
hydrographic casts were continued out to NH 165. Here the GEK electrodes
were again streamed and a continuous record was obtained back to NH 65.
The results are presented in the same manner as the 24 hour run and
following that data in Tables 9 and 10, and Figures 33, 34, 35, and 36.
LONGITUDE (WEST)
r
(i)
65.55
45
NAUTICAL M/LES FROM NEWPORT ALONG LAT/TUDE 44° 39.1'
Figure 28
Cruise pattern traversed during 24 hour GEK measurement.
55
GEK BRIDGE LOG SHEET
(record the beginning of each GEK maneuver as follows)
Turn
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
Ship
Depth
Speed 150 meters)
(
)
(PST)
11/20
11/20
11/20
11/20
11/20
11/20
/
.
6'
11/20
1121
11/21
11/21
112
1121
11/21
1121
Remarks
9. 0
8. 0
---
Time of Maneuver Completion
1312
----
9. 0
8.
- --
2057
_
-9.0
Basic GEK Sail Plan 24 Hr.RunCruise No. 6711
TABLE 6
Annotation sheet implimented for use on the
bridge during GEK maneuvers.
.
0835
----
omputed by Vessel R/V YAQUINA
Cruise 6711
Date
11/20/67
GEK DATA SHEET
TBC
Course B
•
----_ ____-__ _ __
h ip
)ate Time Latitude _Longitude Somp
\l'orth-South
Zero
Speed Magnetic
omponent(c s'-c)
1
sec.
r
(cm.
(knots) Intensit
(PST)
Reading I 15. 0 Reading I
( Chart 1702)
Reading 1119. 4 Reading II
Stand. O. 500
-20.0 Average 17.2 Average
1/20 1250 44° 39. 11125° 35.4' 9. 0 Local 0. 495
Direction 180° Direction
/
1
8. 0
-19.0
8. 0
( Chart 1702)
Stand.O. 500
Local°. 500
-16.0
8. 0
( Chart 1702)
Stand.° . 500
Local°. 500
9. 0
(Chart 170?)
Stand.O, 500
Local0. 495
8, 5
( Chart 1702)
Stand. 0. 500
Local 0, 500
1
1/20 1425 44° 39.2'1125° 21.0'
1
.1/20 1604 44° 39.3' 1 125°06.7'
[1/20 1717 44° 39.3'1125° 21.1'
[1/20 1900 44° 39.1' 1125° 35.0'
1
11/20 2038 44° 39,5' 125° 21.8
Reading I
Reading II
Average
Direction
Reading I 31.0 Reading I
Reading U 25, 0 Reading II
Average 28, 0 Average
Direction 180° Direction
Reading I 25.0
Reading I123.0
Average 24.0
Direction 180°
( Chart 1702)
Stand.O. 500
Local0. SOO 1
-21. 0
-33.0
-21.0
i Speed _ ;
Speed
Dir
1 Dir
I
Speed
Dir
Speed_
I Dir
Speed
Dir
Speed_
Dir
I
Reading I
Reading II
Average
Direction
Reading I 61. 3
Reading 1156. 7
Average 59.0
Direction 180°
Reading I
tZ eading II
Average
Direction
Speed
Dir
Reading I15.0
Reading 1113. 0
Average 14.0
Direction 180°
Reading I
Reading II
Average Direction
Speed
Dir
1
■
1 Speed_
1 Dir
Speed
Dir
1
1 Speed _
1 Dir j
24 HR. RUN
rn
Final
Resultant Cor- Current rection , Current
I
erector ! Factors Value
Reading 1 48. 2
Reading II3 7. 8
Average 43.0
Direction 180°
TABLE 7
01
1; Speed
Dir
1 of 3
LONG CABLE
Computed by TBC
GEK DATA SHEET
Vessel R/V YAQUINA
Cruise
6711
Date
11/20-11/21
Date Time ,Latitude Longitude Ship
Electrical
Course A
Course B
Resultant CorZero
Magnetic
Speed
north-south;Current
Current
rection :Curre
1
'(PST)
1
(cm. /sec. ) component cm ec. )
(knots ) intensit
Vector ■_.Factors Value
( Chart 1702)
Reading I
Reading 11.
Stand. 0, 50O
Reading II 6 , 5. Reading II
11/20 2223 44° 39. 6 ? 125° 07, 0'
Local 0. 50c
9, 0
9 , 0 Average
Speed
-21. 0 Average
Speed
Direction 180°
Direction
Dir
Dir
(Chart 1702) no readinglReading I
Stand, 0. 500 (recorder Reading II -Local 0. 500 jammed) Average
__
Direction --
Reading I
Reading ii
Average
Direction
Speed
Dir _
Speed_
Dir
9. 0
( Chart 1702)
Stand, 0, 500
Local O. 495
-16. 0
8, 0
(Chart 1702)
Stand. 0, 500
Local 0. 500
-22. 0
11/20 2330 44° 39. 2 125°22. 0' I 9. 0
11/210105
44° 39, 7' 125°35. 5'
i
11/21 0345 44° 39. 3' 1125° 06. 7'
8, 0
(Chart 1702)
Stand, 0. 500
Local 0. 500
8, 5
( Chart 1702)
Stand, 0, 500
Local O. 495
I
11/21 0505 44° 39, 8' 1 125° 21.05'
11/21 0650
44° 39, 3' 125°35, 4'
Reading I
Reading II
Average
Direction
13, 6
10, 4
12, 0
180°
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
Reading I
Reading II
Average
Direction
14, 0
18, 0
16, 0
180°
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
-29.0
Reading I 17, 0
Reading 1118. 0
Average 17, 5
Directiori—j0
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
-22. 0
Reading I 40.5
Reading II 35.5
Average
38, 0
Direction 180°
Reading I
Reading II
Average
Direction
Speed
Dir
,
i
24 HR, RUN 2 of 3
Speed
Dir
1
ble 7, Continued
Computed by
Electrical
Date Time , Latitude Longitude Ship
zero
Speed Magnetic
cm. sec.)
(PST)
(knots) Intensit
(Chart 1702)
Stand. 0.500
-25.0
Local 0.500
0
9.
11/21 0815 44° 39.1' 125° 21.3'
I
11/21 0948 44° 39,6 125° 07.0'
11/21 1235 44° 39.2 125° 36.0'
;
R/V YAQUINA
6711
11/21/67
Final
Course B :Resultant CorCourse A
..e... ____
nortn-sourn
Value
Factors
vector
components cm sec.
I
I
Reading
Reading I....iLQ
Reading II 41.Q Reading II
i
1 Speed
Speed
Average
41 0 Average
! Dir
Direction
Dir
Direction 180
,re,"......l.",
,..... ■••
,...,
■
9.0
(Chart 1702)1
Stand. 0.5001
Local 0.500
Reading I
Reading II
Average
Direction
35.0
33,0
34,0
180°
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
9.0
(Chart 1702)
Stand. 0. 500
Local 0.495
Reading I
Reading II
Average
Direction
45.2
38 . 8
42 0
180 0
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
Reading I
Reading II
Average
Direction
Reading I
Reading /I
Average
Direction
Speed
Dir
Speed_
Dir
(Chart 1702)
Stand.
Local
Reading I
Reading U
Average
Direction
Reading I
Reading II
Average
Direction
Speed
Dir
Speed_
Dir
(Chart 1702)
Stand.
Local
Reading I
Reading II
Average
Direction
Reading I
Reading II
Average
Direction
Speed
Dir
; Speed_
Dir
(Chart 1702)
Stand.
Local
i
If
Vessel
Cruise
Date
GEK DATA SHEET
TBC
-22.0
24 HR. RUN 3 of 3
Computed by
TBC
GEK DATA SHEET
VesselaayAplazu_
Cruise
6711
Date jaL2pZkL__
-.. `, ,- .' '- . ,-...,.
%... Li LI 1 b e .tSA
f
l.OLIKbe ID
Speed Magnetic
north-south
Zero
(PST)
(knots Intensit
cm. /sec.) component(cm/ ec. )
( Chart 1702)
Reading I 20.0: Reading I
Stand. O. 5001
Reading II 21.0 Reading II
11/20 1250 44° 39. 1 1 125° 35. 4' 9. 0
Local 0. 4951 -13.0
Average
20.5 Average
Direction 180° Direction
•
11/20 1425 44° 39. 2 125° 21. 0'
11/20 1604 44° 39.3' 125°06. 7'
11/20 1717 44° 39. 3' 125° 21. 1'
11/20 1900 44°39. l' 125°35. 0'
11/20 2038 144° 39. 5' 125° 21. 8'
8. 0
(Chart 1702)
Stand. O. 500
Local O. 500
8. 0
( Chart 1702)
Stand. 0 500
Local 0. 500
8. 0
(Chart 1702)
Stand. 0. 500
Local O. 500
-7. 0
-9. 0
-7. 0
9. 0
(Chart 1702)
Stand. 0. 500
Local O. 495
-16.0
8. 5
(Chart 1702)
Stand. 0.500
Local 0. 500
+0. 50
resultant
Current
vector
,Lortrinat
rection :Current
!
Factors Value
I
Speed
Dir
i
Speed
1 Dir
Reading I 31.0
Reading II 27.0
Average
29 . 0
Directioriiw"
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
Reading I 38 5
Reading II 35 . 5
Average0
Direction 1800
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
Reading I 47. 0
Reading II 45.0
Average
46 . 0
Direction J8 00
Reading I
Reading II
Average
Direction
Reading I 69.0
Reading II 63.0
Average
66.0
Direction 1800
Reading I
Reading II
Average
Direction
_...
-:.._
Reading I 16.0 Reading I
Reading II 24.0 Reading II
Average
20 . 0 Average
Direction 180° Direction
.
Speed
Dir
Speed
Dir
i
Speed
Dir
! Speed_
1 Dir
Speed
Dir
1! Speed
24 HR. RUN 1 of 3
SHORT CABLE
fir
1
1
able 7, Continued
:omputed by
Vessel R/V YAQUINA
6711
Cruise
11/20-11/21
Date
GEK DATA SHEET
TBC
____
snip
,
north-south
Zero
j
Speed Magnetic
1
cm. sec. com•onent cm./sec. )
(PST)
'(knots) intensit
Reading Illa 5 Reading I
( Chart 1702)1
Reading II 18, 5 Reading II
Stand. 0. 500
1
18, 0 Average
Average
+2. 0
Local 0. 50d
1/2C 2223 44° 39. 6'11 125°07. 0' 9. 0
Dire ction 180° Direction
)ate 'Time Latitude Longitude
•
_
9. 0
(Chart 1702)
Stand. 0 500
Local 0 _ 0 cl
0
( Chart 1702)
Stand. 0 500
Local 0 . 495
8. 0
(Chart 1702)
Stand. 0. 500
Local 0. 500
8. 0
(Chart 170.).)
Stand, 0. 500
Local 0. 500
8.5
( Chart 1702)
Stand. 0. 500
Local 0.495
_
1/20 2330 44° 39. 2'1125° 22. W
11/21 0105 44° 39. 7' h 125° 35. 5'
11/21 0345 44° 39, 3' 125°06. 7'
11/21 0505 44° 39. 8' 125° 21.05'
11/21 0650 44° 39. 5' 125° 35.4'
9.
+4. 0
+2. 50
+1. 0
+11.0
+O. 0
_
'Final
rection ;Current
Factors • Value
•Resu lt an t :Cor, Current
I
%rector
1
Speed
; Dir
Speed_
Dir
Reading I
Reading II
Average
Direction
Speed
Dir
Speed_
Dir
Reading I 19, 0 Reading I
Reading II 20 0 Reading II
Average
Average
Direction 180° Direction
Speed
Dir
Speed
Dir
. Speed
. Dir
Speed_
Dir
; Speed
I Dir
Speed
Dir
Reading I 17.5
Reading II 18, 5
Average
18. 0
Direction 180°
1
Reading I 25.0
Reading n 17.0
21.0
Average
Direction 180°
Reading I
Reading II
Average
Direction
Reading I 42.0
Reading II 43. 0
42.5
Average
Direction 180°
Reading I
Reading II
Average
Direction
Reading I 49.0
Reading II 43. 0
46. 0
Average
Direction 180 0
I
Reading I
Reading II
Average - 'Speed
Dir
Direction
'
Speed
Dir
Computed by
TBC
GEK DATA SHEET
- - .
-----Speed Magnetic
Zero
PST
knots Intensit
cm sec
(Chart 1702)
Stand. 0 500
11/21 0815 44° 39. 1' 125° 21.3
9.0 Local 0 500
+14.0
11/21 1235 44° 39.2' 125° 36, 0'
•
iJ
Current
Vector
rection ;Current
Factors Value
e
Reading I
Reading II
Average
Direction
Speed
Dir
Speed_
Dir
Reading I 43.0
Reading II 38.0
Average 40.5
Direction 180°
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
Reading I 45.0
Reading 1.1 47.0
Average 46.0
Direction 180 0
Reading I
Reading II
Average
Direction
Speed
Dir
Speed_
Dir
Reading I
Reading II
Average
Direction
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
(Chart 1702)
Stand,
Local
Reading 1
Reading U
Average
Direction
(Chart 1702)
Stand.
Local
Reading I
Reading II
Average
Direction
Reading I
Reading II
Average
Speed
Direction
....-,_—
_,.. Dir
Reading I
Reading II
Average
Speed
Direction
Dir
0
(Chart 1702)
Stand. 0.500
Local 0.500
9. 0
( Chart 1702)
Stand, 0.500
Local 0.495
9.
......04..“.,
!north-south
com•onen us 4
Reading I 30.0
Reading II 29.0
Average 29.5
Direction 180°
i
'11/21 0948 44°39,6' 125°07.0'
i
Vessela/ayAQuilui_
Cruise 6711
Date_ 1141.0_
(Chart 1702)
Stand,
Local
+2.5
-4. 0
Speed_
I Dir
I
I
1
j
!
:
24 HR, RUN 3 of 3
SHORT CABLE
Speed
Dir
TABLE
62
LATITUDE
440 39.
44° 39.
440 39.
44° 39.
44° 39.
44. 39.
1'
1'
1'
1'
1'
1'
It
It
It
It
(+002. 0')
8
24 HR. RUN .TEMPERATURE RECORD
(at the surface)
TEMPERATURE (° C)
LONGITUDE
125° 25. 6'
125° 17. 8'
125° 12. 0'
125° 10. 9'
125° 17. 4'
125° 24. 5'
125° 29. 5'
125° 31. 1'
125° 22. 1'
125° 16.4'
125° 10. 9'
125° 07. 2'
125° 14. 6'
125° 21.2'
125° 23. 3'
125° 26.5'
125° 34. 2'
125° 29.4'
125° 25. 6'
125° 21.6'
125° 17. 4'
125° 14. 7'
125° 08. 6'
125° 11. 8'
125° 15. 6'
125° 19. 1'
125° 21. l'
125° 28. 0'
125° 30.0'
125° 34. 6'
125° 34. 0'
125° 31.0'
125° 27. 5'
125° 23, 4'
125° 19. 7'
125° 15. 1'
125° 11.0'
125° 7. 7'
125° 8. 2'
125° 12.4'
125° 19. 3'
125° 23, 0'
125° 27. 0'
125° 29. 7'
125° 32.5'
13.42
13.40
13, 30
13, 29
13. 36
13. 46
13. 24
13. 10
13. 38
13. 35
13. 12
13, 10
13. 20
13. 36
13. 34
13, 39
13. 19
13. 19
13, 31
13, 28
13. 21
13. 19
13, 18
13. 06
13. 18
13. 21
13, 22
13. 32
13, 13
12,93
12. 93
13. 12
13, 33
13, 24
13. 22
13.08
13,00
13. 13
13. 13
13, 04
13, 27
13. 28
13. 35
13. 11
12. 93
I0
09481
0'
LONGITUDE FROM /25°W
1
20'
63
30'
1235i D
70
0941
0 8151
0650
10 03454,
05051
0650
IC
I.
ct
O
•- 70
C..1
t4 I_
(i)
\
_
.Ca
.... 70.—
10 0344
Cr)
01051 A
,
‘(1
•
11. 70.tz, 10 22234
23304,
0105
D
• 70
4.1
10 22234,
20384,
1900
C
16041
17171
1900
B
16041.
1425 I
v
•
ta
70
10
O
cf)
70
I0
70
12 504 A
STAR
45
55
65I
NAUTICAL M/LES FROM NEWPORT ALONG LAT/rage 44° 39./'
(TIME OF MEASUREMENT IS INDICATED
NEXT TO EACH VECTOR SHOWN)
Figure 29
Cruise 6711, short cable, 24 hour run. Refer to text.
64
LONGITUDE FROM 125 0 W
30'
20'
10'
14 —
20
0
...
111.■ .....
.....
12
40
14
•
..••• .
.
...
-
-
-
-
""
-4---"
12
14
•
_
__
-
.44/
•
0 p
•••--
—40
20 ikt
—
1,
(J)
5-
40
20 4•1
--0- - -
-
0
-
• 12
—
cr)
14
--
-
__
_
Ct
Itt
40 Ct
20 vi
0 O
-■•■
t2
40
20
-- 14
0
N
s4
irt
1,
—
40
20
12
14
..
12
45
0
-
-
55
65
40
NAUT/CAL M/LES FROM NEWPORT ALONG LAT/TUDE 44°39./'
Figure 30
Cruise 6711, short cable, 24 hour run.
14.1
65
LONGITUDE FROM /25° W
I0
10'
09481
1
20'
30'
1235 I1
70
I0 09481
0815
0650]
C
05054
0650j
B
0105
A
O
70
10 0345+
LIJ
(*)
70
10 0345+
tr)
O
p
70
10 2223
2330
4
0105
,4 70
LtJ
10 2223
1900
2038
C
70
I0
16041
1711
1900
14251
1250
START
O
7010
70
16041
I
45
I
55
4 A
I
65
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° SRI'
(TIME OF MEASUREMENT IS INDICATED NEXT TO EACH VECTOR SHOWN)
Figure 31
Cruise 6711, long cable, 24 hour run, Refer to text,
66
LONGITUDE FROM 125° W
10'
20'
I
I
14
I
30'
1
120
—0
•
•
12
40
20
14
.""N
0
-
••••••-
(r)
— —•
12
40 \.)
■._
20
14
—0
•11--
—‘ 12
—40
20 lu
O
14
—
—
—
0
—4— —
(f)
•
12
4
p
••••••
40
20
14
- 0
Lti
40
•
— 20 cri
—
_
0
ti
t2
40
20 ct
14
—___
— 0 k.
12
40
20
14
—0
•V•
12
45
NAUTICAL
55
1 40
65
MILES FROI'd NEWPORT ALONG LATITUDE 44°391'
Figure 32
Cruise 6711, long cable, 24 hour run.
67
TABLE 9
GEK BRIDGE LOG SHEET
(record the beginning of each GEK maneuver as follows)
Turn
No.
1
2
3
4
5
6
7
8
9
10
111
Date
11/21
11
11 21
11 21
11 21
11 21
11 21
11 21
11 21
11 22
11 22
111 22
Longitude
126° 55.3'
126°46.5'
126°37.9'
126° 29.2'
126° 19.0'
126° 10.6'
126°02.5'
125°48.9'
125° 30.4'
125° 19.8'
125°03.2'
Recovering
Depth
Ship
Sit* underr
Speed J50
meters)
(knots)
10
10
10
10
10
10
10
10
10
10
10
Basic GEK Sail Plan NR Run Cruise No. 6711
Remarks
a
TABLE 10
:omputed by
Vessel R/V YAQUINA
Cruise 6711
GEK DATA SHEET
TBC
Date
Course B
_______
___ __
A
Cou r se
)ate 'Time Latitude Longitude onip
Speed Magnetic Zero north-south
(cm./sec. ) 'component(cm./sec. )
(knots) bite ns it
PST)
Reading I 20 .0 Reading I
(Chart 1702)
Reading II 16.0 Reading II
Stand. O. 500
+29.0 Average 18. 0 Average
Local 0. 495
1/21 1412 44° 38.1' 126°55. 3` 10
Direction 180° Direction
/
46. 5'
L1/21 1515 44° 38.9'1126°
,
11/21 1615 44° 36. 8 126° 37. 9'
11/21 1715 44° 36.8 1 ; 126° 29. 2'
10
(Chart 1702)
Stand. 0. 500
Local 0.495i
10
( Chart 1702)
Stand. 0. 500
Local O. 495
10
(Chart 1702)
Stand. 0. 500
Local 0. 500
10
(Chart 1702)
Stand. 0. 500
Local O. 500
10
( Chart 1702)
Stand. 0. 500
Local 0.500
1
'11/21 1815 44° 37. 8'1126°19. 0'
1
11/21 1915 44° 38.8'1126° 10. 6'
1
11 21 /67
Final
Resultant Cor- Current
rection
Current
vector Factors Value
1
Speed
Dir
Speed_
Dir
5
Reading I
Reading II 6. 5
8. 0
Average
0000
Direction
Reading I
Reading II
Average
Direction
Speed
Dir
SpeedDir
Reading I 20.0
Reading II 21.0
Average 20.5
Direction 180°
Reading I
Reading II
Average
!Direction
Speed
Dir
Speed_
Dir
+28.5
Reading 1 26.0
Reading 1122.0
Average 24.0
Direction 180°
Reading I
Reading II
Speed
Average
Direction - Dir
Speedy
Dir
+27.5
Reading I 6 0
Reading II 5 0
55
Average
Direction 000°
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
Reading I 12.0
0
Reading
Average 10.5
Direction 180°
Reading I
Reading II
Average Direction
Speed
Dir
, Speed
; Dir
9.
+31.0
+28.0
II 9.
+29.0
•
Computed by
TBC
GEK DATA SHEET
Vessel R/V YAQUINA
6711
Cruise
Date
11/21-11/22
Date 'Time Latitude Longitude Ship
Electrical ; Course A
Course B
Speed Magnetic
Zero
Inorth- south
1(YST)
(knots) Intensity
,(cm./sec. ) component(cm./rec.)
( Chart 1702)
Reading I 19, 0 Reading I
Stand.
O.
500
I
Reading 1115, 0 Reading II
11/21 2015 44° 39.3' 1126°02. 5
10
Local O. 500
+34, 0 ,Average 17. 0 Average
Direction 180°
........ Direction
11/21 2150 44° 39.1' 125°48, 9'
11/21 2330
44° 38, 8'1 125° 30.4'
11/22 0047 440 38,9' 125° 19. 8'
11/22 0210 44° 39,2' 125° 03, 2'
10
(Chart 1702)
Stand. 0, 50
Local O. 509
+35, 0
10
( Chart 1702)
Stand, 0, 500
Local 0. 500
+36, 0
10
(Chart 1702)
Stand, 0, 500
Local O. 500
+37, 5
10
(Chart 1702)
Stand, 0,500
Local 0, 500
( Chart 1702)
Stand,
Local
Speed
Dir
Speed
Dir
Reading I 29.5
Reading 1126, 5
Average 28. 0
Direction 180°
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
Reading I 24 4
Reading U 26 0
A verage 25 2
Direction 180 0
Reading I
Reading II
Average
Direction
Speed
Dir
Speed
Dir
Reading 111, 0
Reading II 9. 0
Average 10, 0
Directiotirg7
Reading I
Reading II
Average
Direction
; Speed
, Dir
Reading I 29. 0
Reading
23. 0
Average 26, 0
e
Direction
180°
Reading I
Reading II
Average
1Speed
Direction
Dir
-.:.-...-_-.
Reading I
Reading II
Average
Speed
Di rection
T1 ; r
II
+21. 0
Resultant CorFinal
Current rection i Current
vector
Factors Value
Reading I
Reading II
Average
Direction
Speed_
Dir
Spe ed ____
Dir
I
NR RUN
, Speed
2 of 2
SHORT CABLE
i
1
1
Table 10, Continued
TBC
omputed by ►ate Time Latitude Longitude •
Dill
;
-___ _________
[
-
north-south
1 Zero
,Speed Magnetic
(cm.
/sec.))component(cm.
i
(knots Intensit
(PST)
Reading I 14,0
(Chart 1702)1
50q
Reading II 16.0
0.
Stand,
-16. 0Average
15.0
Local 0. 495L1/21 1412 44° 38. l' 126° 55. 3' 10
Direction 180°
11/21 1515
38.9 1126°46. 5'
11/21 1615 44° 36, 8' 126° 37. 9'
11/21 1715 44° 36.8' 126° 29. 2'
11/21 1815 44° 37. 8'1126° 19.0'
11/21 1915 44° 38.8' 126° 10, 6'
Vessel R/V YAQUINA
Cruise 6711
Date 11/21/67
GEK DATA SHEET
Final
Resultant ,CorCurrent rection !Current
',rector ,Factors Value
Course B
1
ec. )
Reading I
Reading II
Average
Direction
10
(Chart 1702)
Stand. 0. 50
Local O. 495
Reading I 13.5
Reading 1110. 5
-21.0 Average 12.0
Direction 180°
10
( Chart 1702)
Stand. 0. 500
Local 0, 495
Reading I 37.0
Reading U 29, 0
-20.0 Average 33.0
Direction 180
Reading I
Reading n
Average Direction
Reading I
Reading II
Average
Direction
10
(Chart 1702)
Stand. 0, 500
Local O. 500
Reading I 39.0
-20.0 Reading II 35.0
Average 37.0
Direction 180°
1
1
i Speed
Speed
Dir
1 Dir
I
I
!Dir
,Dir
Speed
Dir
i Speed
i Dir
Speed Dir.
Reading I
Reading II
Average
Direction
, Speed
Dir
Speed
Dir -
10
(Chart 1702)
Stand. 0. 500
Local 0. 500
Reading I 13.5 Reading I
Reading II 10. 5 Reading II
-20.0 Average 12.0 Averag
Direction 180° Direction
Speed
1Dir
Speed
Dir
10
(Chart 1702)
Stand. O. 500
Local O. 500
Reading I 28.5
Reading 11 23.5
-19.0 Average. 26.0
Direction 180°
Reading I
Reading II
Average
Direction
' Speed
Dir
j
Speed
1 Dir
Computed by
TBC
GEK DATA SHEET
Vessel
Cruise
Date
Date Time Latitude Longitude
Ship
Electrical
Course A
Course B
tSpeed Magnetic
Zero
i north- south
f PST)
(knots) Intensity
(cm./ s ec.) comnonent(cna-4sec.)
( Chart 1702)
Reading Laa Rea ing I
Stand. 0 500
Reading II3 .8 , 0 Reading II
11/21 2015 44°39. 3' 126° 02.5'
10
Local O. 500
-18. 0 Average 36 0 Average
Direction 180 ° Direction
11/21 2150 44°39. 1' 125°48. 9'
11/21 2330 44° 38. 8' 125°30. 4'
11/22 0047 44° 38. 9' 125°19. 8'
11/22 0210 44° 39. 2' 125°03. 2'
1
10
(Chart 1702)
Stand.O. 500
Local°. 500 '
10
( Chart 1702)
Stand.° 500
Local 0, 500
-17.0
10
(Chart 1702)
Stand.° 500
Local() 500
-15.0
10
(Chart 1702)
Stand.O. 500
Local 0. 500
(Chart 1702)
Stand.
Local
I
-18.0
-7. 0
R/V YAQUINA
6711
11/21-11/22
Resultant CorFinal
Current rection Current
vector Factors Value
Speed
Dir
Speed
Dir
Reading I
Reading n
Average
Direction
Speed
Dir
Speed
Dir
Reading I 45.5 Reading I
Reading II 41.5 i Reading II
Average .
5.. Average
Direction 1800 Direction
Speed
Dir
Speed
Dir —
'
, Speed
i Dir
Speed__
Dir
Reading I 45.5
Reading 1141.5
Average 43.5
Direction 180°
j14.
Reading I 26 0
Reading 1123.0
Average 24.5
Direction 180°
Reading I
Reading /I
Average
Direction
Reading I 20.0
Reading /I 22.0
Average 21, 0
DirectiorTIK;
Reading I
Reading II
Average
Direction
Reading I
Reading II
Average Direction
Reading I
Reading II
Average
Direction
.1.=0017
i Speed
Speed ____
Dir
I Dir
i Speed
j
Speed __
Dir
Dir
NR RUN
2 of 2
LONG CABLE
LONGITUDE
126°
127°
128°
125°
1
ct 80
-a
60
_LM
40
IA1,1/ \iNI 1/\
Cr)
LU
20
,
0
IC'
f
20
4 0—
N
60
Figure 33
Cruise 6711, short cable, Newport return run.
c, 80
165
145
125
105
I
85
65
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39.1'
II
25
I28°
LONGITUDE
I 27 °
I
I
I26°
I25°
I
I
80
15
0Cc 60
14
„es,
3
N
•
141
1
40
Ls<
0)
20
0
lei
0
ti
-J
141
20
0
4 0—
(.)
Eel--
60
Figure 34
lV
141
▪
Cruise 6711, short cable, Newport return run.
80
165
145
125
105
85
65
45
1
1
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39.1'
1
25
2
LONGITUDE
127°
128°
125°
126°
L
IZ• 20
C
40-
C
60 —
...*
1,
8
S
Figure 35
Cruise 6711, long cable, Newport return run.
80 ---
Cr)
%.....
1►I
I
165
I
I
145
►
I
I
I25
I
I
I
I
105
1
I
1
85
I
I
65
I
,
1
I
I
I
45
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39./'
I
25
I
128°
I27°
LONGITUDE
126°
125°
80
15
14
0
r4 60
Om.
••••■•■••
•
13
N
12
j
40
(f)
20
L.!
11
0
laj
0
172
sIC
b. 1
20
0
0- N
1-0
1,1
60
Figure 36
ki
80
Cruise 6711, long cable, Newport return run.
165
145
I I
125
105
„
85
65
45
I I
NAUTICAL MILES FROM NEWPORT ALONG LATITUDE 44° 39.1
25
76
CONCLUSIONS AND PROJECTIONS
The attempt has been made here to present as precisely and accurately
as possible the results and the innovations of all GEK cruises to date. No
attempt has been made to interpret these results or to make any inferences
from them. At the present time theoretical work is being done with the
objective of placing these results into a more precise and meaningful framework of oceanographic import and insight. The mathematical formulations
are complex and understanding them in terms of the physics of the sea as
provided by the collected data is the principal challenge involved here.
Meanwhile raw data must be accumulated carefully and accurately to enable
the convenient and reasonable testing of any sound hypothesis forwarded from
theoretical study. This report is the beginning of such a series of factual
data presentations of electromagnetic method results. It is intended to be
complemented in the near future with consequent theoretical advances.
Presently work is being done to both improve and expand the GEK
method. The following is a partial list of construction projects now being
performed and serious near-future considerations.
1)
New electrode-cases are being built which keep the electrodes in a
quasi-constant environment. This new design will effectively keep
the electrodes in situ at all times, thus avoiding or greatly reducing
the previously needed long equilibration time. This design should
improve operational electrode response to significant electrical signals and reduce the response to electro-chemical effects.
2)
New electrodes of original design are being fabricated, balanced
electrically, and tested environmentally. These will be used in the
new cases hopefully to increase the level of reliability and signal
response.
3)
A completely new electronic recording system is being readied to
replace the existing somewhat anachronous one now used. A dual
input Hewlett-Packard strip chart potentiometric recorder is coupled
to a newly designed input device employing operational amplifiers to
provide infinite input impedence to the measuring electrodes and to
"actively" filter existing signal noise. High reliability, compactness
and portability, better signal quality and accuracy, and ruggedness
with continued precision are all the considerations that will be combined
in this new system.
Moored vertical GEK methods and interpretation are being studied for
use in conjunction with Oregon State's 184 foot stable buoy, TOTEM
and also with the instrument array deployment contained in the
THEMIS project. In mind are ways to test the electrochemical effects
on vertically spaced electrodes, as described by Sanford (1967).
77
"Free fall" vertical GEK is under consideration for deep current
profile possibilities.
6)
A careful study of GEK measurements obtained around vertically
spaced free drifting drogues has been recently carried out. Such
a study should produce a rough "calibration" of GEK current
measurements in the area and indicate more clearly exactly what
is being measured.
78
REFERENCES
Bein, W., H. Hirsekorn, and L. Moller. 1935. Konstanten bestimmungen
des Meerwassers and Ergebnesse uber Wasser Korper. Veroff.
Inst. f. Meereskunde, Univ. Berlin, N. F. , Reihe A, No. 28, 240 pp.
Hutt, J. R. 1966. Relationships between thermal and electrical conductivities
of ocean sediments and consolidated rocks. Thesis, Oregon State Univ.
Knauss, J.A., and J. L. Reid. 1957. The effects of cable design on the
accuracy of the GEK. Trans. Amer. Geophy. Union 38 (3), 320-325.
Longuet-Higgins, M. S., M. E. Stern, and H. Stommel. 1954. The electrical
field induced by ocean currents and waves, with applications to the
method of towed electrodes. Pap. Phys. Oceanogr. Meteor. XIII, (1),
1-37.
Malkus, W. V. R., and M. E. Stern. 1952. Determination of ocean transports
and velocities by electromagnetic effects. J. Mar. Res. 11, (2), 97-105.
Mangelsdorf, P. C. Jr. 1962. The world's longest salt bridge, Marine
Sciences Instrumentation Vol. 1, Plenum Press, New York.
Ryzhkov, Yu. G. 1957. Measurement of electric current in the ocean.
Doklady Akademii Nank SSSR. CXIII, (4), 787-790. (Trans. Office
Tech. Serv. U. S. Dept. of Commerce, Wash. D. C. , PB141218T,
JPRS (DC) L-542.)
Sanford, T. B. 1967. Measurement and interpretation of motional electrical
fields in the sea. Thesis, Mass. Instit. of Tech.
Stommel, H. 1948. The theory of the electric field induced in deep ocean
currents. J. Mar. Res. 7, (3), 386-392.
von Arx, W. S. 1950. An electromagnetic method for measuring the velocities
of ocean currents from a ship underway. Pap. Phys. Oceanogr.
Meteorol., II (3), 1-62.
von Arx, W. S. 1962. An Introduction to Physical Oceanography, AddisonWesley, Reading, Mass.