LEARNING MARGINAL AMP CHAIN GRAPHS UNDER FAITHFULNESS REVISITED
advertisement

LEARNING MARGINAL AMP CHAIN GRAPHS UNDER
FAITHFULNESS REVISITED
JOSE M. PEÑA
ADIT, IDA
LINKÖPING UNIVERSITY, SWEDEN
JOSE.M.PENA@LIU.SE
MANUEL GÓMEZ-OLMEDO
DEPT. COMPUTER SCIENCE AND ARTIFICIAL INTELLIGENCE
UNIVERSITY OF GRANADA, SPAIN
MGOMEZ@DECSAI.UGR.ES
Abstract. Marginal AMP chain graphs are a recently introduced family of models that is
based on graphs that may have undirected, directed and bidirected edges. They unify and
generalize the AMP and the multivariate regression interpretations of chain graphs. In this
paper, we present a constraint based algorithm for learning a marginal AMP chain graph from
a probability distribution which is faithful to it. We show that the marginal AMP chain graph
returned by our algorithm is a distinguished member of its Markov equivalence class. We
also show that our algorithm performs well in practice. Finally, we show that the extension
of Meek’s conjecture to marginal AMP chain graphs does not hold, which compromises the
development of efficient and correct score+search learning algorithms under assumptions
weaker than faithfulness.
1. Introduction
Chain graphs (CGs) are graphs with possibly directed and undirected edges, and no semidirected cycle. They have been extensively studied as a formalism to represent independence
models, because they can model symmetric and asymmetric relationships between the random variables of interest. However, there are three different interpretations of CGs as independence models: The Lauritzen-Wermuth-Frydenberg (LWF) interpretation (Lauritzen,
1996), the multivariate regression (MVR) interpretation (Cox and Wermuth, 1996), and the
Andersson-Madigan-Perlman (AMP) interpretation (Andersson et al., 2001). It is worth mentioning that no interpretation subsumes another: There are many independence models that
can be represented by a CG under one interpretation but that cannot be represented by any
CG under the other interpretations (Andersson et al., 2001; Sonntag and Peña, 2015). Moreover, although MVR CGs were originally represented using dashed directed and undirected
edges, we like other authors prefer to represent them using solid directed and bidirected edges.
Recently, a new family of models has been proposed to unify and generalize the AMP and
MVR interpretations of CGs (Peña, 2014b). This new family, named marginal AMP (MAMP)
CGs, is based on graphs that may have undirected, directed and bidirected edges. This paper
complements that by Peña (2014b) by presenting an algorithm for learning a MAMP CG
from a probability distribution which is faithful to it. Our algorithm is constraint based and
builds upon those developed by Sonntag and Peña (2012) and Peña (2014a) for learning,
respectively, MVR and AMP CGs under the faithfulness assumption. It is worth mentioning
that there also exist algorithms for learning LWF CGs under the faithfulness assumption (Ma
et al., 2008; Studený, 1997) and under the milder composition property assumption (Peña
et al., 2014). In this paper, we also show that the extension of Meek’s conjecture to MAMP
Date: pgm2014jmpfollowup6.tex, 09:50, 08/10/15.
1
2
CGs does not hold, which compromises the development of efficient and correct score+search
learning algorithms under assumptions weaker than faithfulness.
Finally, we should mention that this paper is an extended version of that by Peña (2014c).
The extension consists in that the learning algorithm presented in that paper has been modified so that it returns a distinguished member of a Markov equivalence class of MAMP CGs,
rather than just a member of the class. As a consequence, the proof of correctness of the
algorithm has changed significantly. Moreover, the algorithm has been implemented and
evaluated. This paper reports the results of the evaluation for the first time.
The rest of this paper is organized as follows. We start with some preliminaries in Section
2. Then, we introduce MAMP CGs in Section 3, followed by the algorithm for learning them
in Section 4. In that section, we also include a review of other learning algorithms that are
related to ours. We report the experimental results in Section 5. We close the paper with
some discussion in Section 6. All the proofs appear in an appendix at the end of the paper.
2. Preliminaries
In this section, we introduce some concepts of models based on graphs, i.e. graphical
models. Most of these concepts have a unique definition in the literature. However, a few
concepts have more than one and we opt for the most suitable in this work. All the graphs
and probability distributions in this paper are defined over a finite set V . All the graphs in
this paper are simple, i.e. they contain at most one edge between any pair of nodes. The
elements of V are not distinguished from singletons.
If a graph G contains an undirected, directed or bidirected edge between two nodes V1 and
V2 , then we write that V1 − V2 , V1 → V2 or V1 ↔ V2 is in G. We represent with a circle, such
as in V1 ⊸
← V2 or V1 ⊸
⊸ V2 , that the end of an edge is unspecified, i.e. it may be an arrowhead
or nothing. If the edge is of the form V1 ⊸
← V2 , then we say it has an arrowhead at V2 . If
the edge is of the form V1 → V2 , then we say that it has an arrowtail at V1 . The parents of
a set of nodes X of G is the set paG (X) = {V1 ∣V1 → V2 is in G, V1 ∉ X and V2 ∈ X}. The
children of X is the set chG (X) = {V1 ∣V1 ← V2 is in G, V1 ∉ X and V2 ∈ X}. The neighbors
of X is the set neG (X) = {V1 ∣V1 − V2 is in G, V1 ∉ X and V2 ∈ X}. The spouses of X is
the set spG (X) = {V1 ∣V1 ↔ V2 is in G, V1 ∉ X and V2 ∈ X}. The adjacents of X is the set
adG (X) = neG (X) ∪ paG (X) ∪ chG (X) ∪ spG (X). A route between a node V1 and a node
Vn in G is a sequence of (not necessarily distinct) nodes V1 , . . . , Vn such that Vi ∈ adG (Vi+1 )
for all 1 ≤ i < n. If the nodes in the route are all distinct, then the route is called a path.
The length of a route is the number of (not necessarily distinct) edges in the route, e.g. the
length of the route V1 , . . . , Vn is n − 1. A route is called descending if Vi → Vi+1 , Vi − Vi+1 or
Vi ↔ Vi+1 is in G for all 1 ≤ i < n. A route is called strictly descending if Vi → Vi+1 is in G
for all 1 ≤ i < n. The descendants of a set of nodes X of G is the set deG (X) = {Vn ∣ there
is a descending route from V1 to Vn in G, V1 ∈ X and Vn ∉ X}. The strict ascendants of X
is the set sanG (X) = {V1 ∣ there is a strictly descending route from V1 to Vn in G, V1 ∉ X
and Vn ∈ X}. A route V1 , . . . , Vn in G is called a cycle if Vn = V1 . Moreover, it is called a
semidirected cycle if Vn = V1 , V1 → V2 is in G and Vi → Vi+1 , Vi ↔ Vi+1 or Vi − Vi+1 is in G for
all 1 < i < n. A cycle has a chord if two non-consecutive nodes of the cycle are adjacent in G.
The subgraph of G induced by a set of nodes X is the graph over X that has all and only
the edges in G whose both ends are in X. Moreover, a triplex ({A, C}, B) in G is an induced
subgraph of the form A ⊸
←B←
⊸ C, A ⊸
← B − C or A − B ←
⊸ C.
A directed and acyclic graph (DAG) is a graph with only directed edges and without
semidirected cycles. An AMP chain graph (AMP CG) is a graph whose every edge is directed
or undirected such that it has no semidirected cycles. A MVR chain graph (MVR CG) is
a graph whose every edge is directed or bidirected such that it has no semidirected cycles.
Clearly, DAGs are a special case of AMP and MVR CGs: DAGs are AMP CGs without
undirected edges, and DAGs are MVR CGs without bidirected edges. We now recall the
3
semantics of AMP and MVR CGs. A node B in a path ρ in an AMP CG G is called a triplex
node in ρ if A → B ← C, A → B − C, or A − B ← C is a subpath of ρ. Moreover, ρ is said to
be Z-open with Z ⊆ V when
● every triplex node in ρ is in Z ∪ sanG (Z), and
● every non-triplex node B in ρ is outside Z, unless A − B − C is a subpath of ρ and
paG (B) ∖ Z ≠ ∅.
A node B in a path ρ in an MVR CG G is called a triplex node in ρ if A ⊸
←B←
⊸ C is a
subpath of ρ. Moreover, ρ is said to be Z-open with Z ⊆ V when
● every triplex node in ρ is in Z ∪ sanG (Z), and
● every non-triplex node B in ρ is outside Z.
Let X, Y and Z denote three disjoint subsets of V . When there is no Z-open path in an
AMP or MVR CG G between a node in X and a node in Y , we say that X is separated
from Y given Z in G and denote it as X ⊥ G Y ∣Z. The independence model represented by G,
denoted as I(G), is the set of separations X ⊥ G Y ∣Z. In general, I(G) is different depending
on whether G is an AMP or MVR CG. However, it is the same when G is a DAG.
3. MAMP CGs
In this section, we review marginal AMP (MAMP) CGs. We refer the reader to the work by
Peña (2014b) for more details. Specifically, a graph G containing possibly directed, bidirected
and undirected edges is a MAMP CG if
C1. G has no semidirected cycle,
C2. G has no cycle V1 , . . . , Vn = V1 such that V1 ↔ V2 is in G and Vi − Vi+1 is in G for all
1 < i < n, and
C3. if V1 − V2 − V3 is in G and spG (V2 ) ≠ ∅, then V1 − V3 is in G too.
The semantics of MAMP CGs is as follows. A node B in a path ρ in a MAMP CG G is
called a triplex node in ρ if A ⊸
←B ←
⊸ C, A ⊸
← B − C, or A − B ←
⊸ C is a subpath of ρ.
Moreover, ρ is said to be Z-open with Z ⊆ V when
● every triplex node in ρ is in Z ∪ sanG (Z), and
● every non-triplex node B in ρ is outside Z, unless A − B − C is a subpath of ρ and
spG (B) ≠ ∅ or paG (B) ∖ Z ≠ ∅.
Let X, Y and Z denote three disjoint subsets of V . When there is no Z-open path in G
between a node in X and a node in Y , we say that X is separated from Y given Z in G
and denote it as X ⊥ G Y ∣Z. The independence model represented by G, denoted as I(G), is
the set of separations X ⊥ G Y ∣Z. We denote by X ⊥ p Y ∣Z (respectively X ⊥/ p Y ∣Z) that X is
independent (respectively dependent) of Y given Z in a probability distribution p. We say
that p is faithful to G when X ⊥ p Y ∣Z if and only if X ⊥ G Y ∣Z for all X, Y and Z disjoint
subsets of V . We say that two MAMP CGs are Markov equivalent if they represent the same
independence model. We also say that two MAMP CGs are triplex equivalent if they have
the same adjacencies and the same triplexes. Two MAMP CGs are Markov equivalent if and
only if they are triplex equivalent (Peña, 2014b, Theorem 7).
Clearly, AMP and MVR CGs are special cases of MAMP CGs: AMP CGs are MAMP CGs
without bidirected edges, and MVR CGs are MAMP CGs without undirected edges. Then,
the union of AMP and MVR CGs is a subfamily of MAMP CGs. The following example
shows that it is actually a proper subfamily.
Example 1. The independence model represented by the MAMP CG G below cannot be
represented by any AMP or MVR CG.
A
B
C
D
E
4
To see it, assume to the contrary that it can be represented by an AMP CG H. Note that
H is a MAMP CG too. Then, G and H must have the same triplexes. Then, H must have
triplexes ({A, D}, B) and ({A, C}, B) but no triplex ({C, D}, B). So, C − B − D must be in
H. Moreover, H must have a triplex ({B, E}, C). So, C ← E must be in H. However, this
implies that H does not have a triplex ({C, D}, E), which is a contradiction because G has
such a triplex. To see that no MVR CG can represent the independence model represented
by G, simply note that no MVR CG can have triplexes ({A, D}, B) and ({A, C}, B) but no
triplex ({C, D}, B).
Finally, it is worth mentioning that MAMP CGs are not the first family of models to
be based on graphs that may contain undirected, directed and bidirected edges. Other such
families are summary graphs after replacing the dashed undirected edges with bidirected edges
(Cox and Wermuth, 1996), MC graphs (Koster, 2002), maximal ancestral graphs (Richardson
and Spirtes, 2002), and loopless mixed graphs (Sadeghi and Lauritzen, 2014). However, the
separation criteria for these families are identical to that of MVR CGs. Then, MVR CGs are
a subfamily of these families but AMP CGs are not. For further details, see also the works by
Richardson and Spirtes (2002, p. 1025) and Sadeghi and Lauritzen (2014, Sections 4.1-4.3).
Therefore, MAMP CGs are the only graphical models in the literature that generalize both
AMP and MVR CGs.
4. Algorithm for Learning MAMP CGs
In this section, we present our algorithm for learning a MAMP CG from a probability
distribution which is faithful to it. Prior to that, we describe how we represent a class of
Markov equivalent MAMP CGs, because that is the output of the algorithm. In the works
by Andersson et al. (1997), Andersson and Perlman (2006), Meek (1995), Sonntag and Peña
(2015) and Sonntag et al. (2015), the authors define the unique representant of a class of
Markov equivalent DAGs, AMP CGs and MVR CGs as the graph H such that (i) H has the
same adjacencies as every member of the class, and (ii) H has an arrowhead at an edge end
if and only if there is a member of the class with an arrowhead at that edge end and there
is no member of the class with a arrowtail at that edge end. Clearly, this definition can also
be used to construct a unique representant of a class of Markov equivalent MAMP CGs. We
call the unique representant of a class of Markov equivalent DAGs, AMP CGs, MVR CGs or
MAMP CGs the essential graph (EG) of the class. We show below that the EG of a class of
Markov equivalent MAMP CGs is always a member of the class. The EG of a class of Markov
equivalent AMP CGs also has this desirable feature (Andersson and Perlman, 2006, Theorem
3.2), but the EG of a class of Markov equivalent DAGs or MVR CGs does not (Andersson et
al., 1997; Sonntag et al., 2015).
Now, we present our algorithm for learning MAMP CGs under the faithfulness assumption.
The algorithm can be seen in Table 1. Note that the algorithm returns the EG of a class of
Markov equivalent MAMP CGs. The correctness of the algorithm is proven in the appendix.
Our algorithm builds upon those developed by Meek (1995), Peña (2014a), Sonntag and
Peña (2012) and Spirtes et al. (1993) for learning DAGs, AMP CGs and MVR CGs under
the faithfulness assumption. Like theirs, our algorithm consists of two phases: The first
phase (lines 1-8) aims at learning adjacencies, whereas the second phase (lines 9-17) aims at
directing some of the adjacencies learnt. Specifically, the first phase declares that two nodes
are adjacent if and only if they are not separated by any set of nodes. Note that the algorithm
does not test every possible separator (see line 5). Note also that the separators tested are
tested in increasing order of size (see lines 2, 5 and 8). The second phase consists of two
steps. In the first step (lines 9-11), the ends of some of the edges learnt in the first phase are
blocked according to the rules R1-R4 in Table 2. A block is represented by a perpendicular
line at the edge end such as in z or z
x, and it means that the edge cannot be a directed edge
5
Table 1. Algorithm for learning MAMP CGs.
Input: A probability distribution p that is faithful to an unknown MAMP CG G.
Output: The EG H of the Markov equivalence class of G.
1 Let H denote the complete undirected graph
2 Set l = 0
3 Repeat while l ≤ ∣V ∣ − 2
4
For each ordered pair of nodes A and B in H st A ∈ adH (B) and
∣[adH (A) ∪ adH (adH (A))] ∖ {A, B}∣ ≥ l
5
If there is some S ⊆ [adH (A) ∪ adH (adH (A))] ∖ {A, B} st ∣S∣ = l and A⊥ p B∣S then
6
Set SAB = SBA = S
7
Remove the edge A − B from H
8
Set l = l + 1
9 Apply the rules R1-R4 to H while possible
10 Replace every edge A − B in every cycle in H that is of length greater than three,
chordless, and without blocks with A z
xB
11 Apply the rules R2-R4 to H while possible
12 Replace every edge A z B in H with A → B
13 Replace every edge A z
x B in H with A ↔ B
14 Replace every induced subgraph A ↔ B ↔ C in H st B ∈ SAC with A − B − C
15 If H has an induced subgraph A
B
C
16
Replace the edge A ↔ B in H with A − B
17
Go to line 15
18 Return H
then
Table 2. Rules R1-R4.
R1
A
B
∧ B ∉ SAC
C
⇒
A
B
C
R2
A
B
∧ B ∈ SAC
C
⇒
A
B
C
R3
A
...
B
⇒
A
...
B
C
R4
A
C
B
D
∧ A ∈ SCD
⇒
A
B
D
6
Table 3. Algorithm for learning AMP CGs presented by Peña (2014a).
Input: A probability distribution p that is faithful to an unknown AMP CG G.
Output: The EG CG H of the Markov equivalence class of G.
1 Let H denote the complete undirected graph
2 Set l = 0
3 Repeat while l ≤ ∣V ∣ − 2
4
For each ordered pair of nodes A and B in H st A ∈ adH (B) and
∣[adH (A) ∪ adH (adH (A))] ∖ {A, B}∣ ≥ l
5
If there is some S ⊆ [adH (A) ∪ adH (adH (A))] ∖ {A, B} st ∣S∣ = l and A⊥ p B∣S then
6
Set SAB = SBA = S
7
Remove the edge A − B from H
8
Set l = l + 1
9 Apply the rules R1-R4 to H while possible
10 Replace every edge A − B in every cycle in H that is of length greater than three,
chordless, and without blocks with A z
xB
11 Apply the rules R2-R4 to H while possible
12 Replace every edge A z B in H with A → B
13 Replace every edge A z
x B in H with A − B
14 Return H
pointing in the direction of the block. Note that z
x does not mean that the edge must be
undirected: It means that the edge cannot be a directed edge in either direction and, thus,
it must be a bidirected or undirected edge. In the second step (lines 12-17), some edges get
directed. Specifically, the edges with exactly one unblocked end get directed in the direction
of the unblocked end (see line 12). The rest of the edges get bidirected (see line 13), unless
this produces a false triplex (see line 14) or violates the constraint C2 (see lines 15-17). Note
that only cycles of length three are checked for the violation of the constraint C2.
The rules R1-R4 in Table 2 work as follows: If the conditions in the antecedent of a rule
are satisfied, then the modifications in the consequent of the rule are applied. Note that
the ends of some of the edges in the rules are labeled with a circle such as in z
⊸ or ⊸
⊸.
The circle represents an unspecified end, i.e. a block or nothing. The modifications in the
consequents of the rules consist in adding some blocks. Note that only the blocks that appear
in the consequents are added, i.e. the circled ends do not get modified. The conditions in the
antecedents of R1, R2 and R4 consist of an induced subgraph of H and the fact that some of
its nodes are or are not in some separators found in line 6. The condition in the antecedent
of R3 consists of just an induced subgraph of H. Specifically, the antecedent says that there
is a cycle in H whose edges have certain blocks. Note that the cycle must be chordless.
4.1. Related Algorithms. In this section, we review two algorithms for learning AMP CGs
and DAGs that can be seen as particular cases of the algorithm presented above.
4.1.1. Algorithm for Learning AMP CGs. Peña (2014a) presents an algorithm for learning
AMP CGs under the faithfulness assumption. We show next that that algorithm coincides
with the algorithm for learning MAMP CGs in Table 1 when G is an AMP CG. Specifically,
if G is an AMP CG then it only has directed and undirected edges and, thus, any edge A z
xB
in H corresponds to an edge A − B in G. Therefore, line 13 in Table 1 should be modified
accordingly. After this modification, lines 14-17 do not make sense and, thus, they can be
removed. The resulting algorithm can be seen in Table 3. This is exactly the algorithm for
7
Table 4. Rules R1’-R4’.
R1’
A
B
∧ B ∉ SAC
C
⇒
A
B
C
R2’
A
B
∧ B ∈ SAC
C
⇒
A
B
C
R3’
A
...
B
⇒
A
...
B
C
A
R4’
C
⇒
B
A
D
∧ A ∈ SCD
B
D
Table 5. Rules R3” and R4”.
R3”
A
B
C
⇒
A
B
C
C
R4”
A
C
B
D
∧ A ∈ SCD
⇒
A
B
D
learning AMP CGs presented by Peña (2014a), except for lines 10-11. Adding these lines
ensures that the output is the EG of the Markov equivalence class of G and not just a CG in
class (Sonntag and Peña, 2015, Theorem 11).
4.1.2. Algorithm for Learning DAGs. Meek (1995) presents an algorithm for learning DAGs
under the faithfulness assumption. We show next that that algorithm coincides with the
algorithm for learning AMP CGs in Table 3 when G is a DAG.
Firstly, the set of nodes [adH (A) ∪ adH (adH (A))] ∖ {A, B} is considered in lines 4 and 5
so as to guarantee that G and H have the same adjacencies after line 8, as proven in Lemma
1 in the appendix. However, if G is a DAG then it only has directed edges and, thus, the
proof of the lemma simplifies so that it suffices to consider adH (A) ∖ {B} in lines 4 and 5 to
guarantee that G and H have the same adjacencies after line 8. Thus, if G is a DAG then
we can replace [adH (A) ∪ adH (adH (A))] ∖ {A, B} in lines 4 and 5 with adH (A) ∖ {B}.
8
Table 6. Algorithm for learning DAGs presented by Meek (1995).
Input: A probability distribution p that is faithful to an unknown DAG G.
Output: The EG CG H of the Markov equivalence class of G.
1 Let H denote the complete undirected graph
2 Set l = 0
3 Repeat while l ≤ ∣V ∣ − 2
4
For each ordered pair of nodes A and B in H st A ∈ adH (B) and
∣adH (A) ∖ {B}∣ ≥ l
5
If there is some S ⊆ adH (A) ∖ {B} st ∣S∣ = l and A⊥ p B∣S then
6
Set SAB = SBA = S
7
Remove the edge A − B from H
8
Set l = l + 1
9 Apply the rules R1’, R2’, R3” and R4” to H while possible
10 Return H
Secondly, if G is a DAG then it only has directed edges and, thus, H cannot have any edge
Az
x B. Therefore, lines 10, 11 and 13 in Table 3 do not make sense and, thus, they can be
removed. Moreover, if H cannot have any edge A z
x B, then any edge A z
⊸ B in the rules
R1-R4 in Table 2 can be replaced by A z B. For the same reason, any modification of an
edge A ⊸
⊸ B into A z
⊸ B in the rules can be replaced by a modification of an edge A − B
into A z B. These observations together with line 12 in Table 3 imply that the rules R1-R4
can be rewritten as the rules R1’-R4’ in Table 4. After this rewriting, line 12 in Table 3 is
not needed anymore and, thus, it can be removed.
Finally, if G is a DAG, then the rule R3’ in Table 4 does not need to be applied to
cycles of length greater than three. To see it, assume that the rule is applied to the cycle
A → V1 → ⋯ → Vn → B − A in H with n > 1. Recall that the cycle must be chordless. Then,
the rule modifies the edge A − B in H into A → B. This implies that G has an induced
subgraph A → B ← Vn , i.e. G has a triplex ({A, Vn }, B). Clearly, B ∉ SAVn . Then, the edge
A − B in H would have been modified into A → B by the rule R1’ anyway. Therefore, the
rule R3’ does not need to be applied to cycles of length greater than three and, thus, it can
be replaced by the rule R3” in Table 5. Likewise, the rule R4’ in Table 4 can be replaced by
the rule R4” in Table 5. To see it, note that A ∈ SCD implies that G has an induced subgraph
C → A → D, C ← A ← D or C ← A → D. Therefore, if R4’ can be applied but R4” cannot,
then H must have an induced subgraph A → C → B − A or A → D → B − A. Then, the edge
A−B gets modified into A → B by R3”. The resulting algorithm can be seen in Table 6. This
is exactly the algorithm for learning DAGs presented by Meek (1995), except for the names
of the rules.
5. Experiments
In this section, we report the performance of our algorithm on samples drawn from probability distributions that are faithful to MAMP CGs and DAGs. For the latter, we also
report the performance of Meek’s algorithm. We implemented both the algorithms in R. We
implemented the algorithms as they appear in Tables 1 and Table 6 and, thus, we did not
implement any conflict resolution technique such as those discussed by Ramsey et al. (2006),
Cano et al. (2008), and Colombo and Maathuis (2014). The implementation will be made
publicly available. To obtain sample versions of the algorithms, we replaced A ⊥ p B∣S in line
9
G
H
A
B
C
D
E
F
A
A
B
B
C
D
D
LCE
C
SC D
SD F
E
E
F
F
LEF
Figure 1. Example of the transformation of a MAMP CG into a DAG.
5 with a hypothesis test. Specifically, we used the default test implemented by the function
ci.test of the R package bnlearn1 with the default significance level 0.05.
5.1. Experiments with MAMP CGs. Since MAMP CGs have not been considered in
practice before, we artificially generated three MAMP CGs for the experiments. To produce
the artificial CG 1, we first produced a graph with 15 nodes and 25 edges such that 20 %
of the edges were directed, 20 % undirected and 60 % bidirected. The edges were generated
uniformly. After removing some edges to satisfy the constraints C1-2 and adding some others
to satisfy the constraint C3, the graph contained 5 directed edges, 4 undirected edges, and
8 bidirected edges. This is what we call artificial CG 1. To produce the artificial CG 2, we
repeated this process but this time 20 % of the initial 25 edges were directed, 60 % undirected
and 20 % bidirected which, after enforcing the constraints C1-3, resulted in the artificial CG
2 having 3 directed edges, 24 undirected edges, and 5 bidirected edges. Finally, we produced
the artificial CG 3 by repeating the process with 60 % of the initial 25 edges being directed,
20 % undirected and 20 % bidirected which, after enforcing the constraints C1-3, resulted in
the artificial CG 3 having 7 directed edges, 4 undirected edges, and 6 bidirected edges.
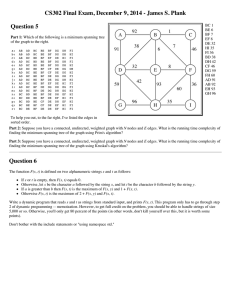
Since there is no known parameterization of MAMP CGs, in order to sample the artificial
CGs, we first transformed them into DAGs and then sampled these DAGs under marginalization and conditioning as indicated by Peña (2014b). The transformation of a MAMP CG
G into a DAG H is illustrated in Figure 1. First, every node X in G gets a new parent X
representing an error term, which by definition is never observed. Then, every undirected
edge X − Y in G is replaced by X → SX Y ← Y where SX Y denotes a selection bias node,
i.e. a node that is always observed. Finally, every bidirected edge X ↔ Y in G is replaced
by X ← LXY → Y where LXY denotes a latent node, i.e. a node that is never observed.
We parameterized each of the DAGs corresponding to the artificial CGs as follows. All the
nodes represented continuous random variables. Each node was equal to a linear combination
of its parents. The coefficients of the linear combinations were all 1 except in the case of the
selection bias nodes, where one was 1 and the other -1. Parentless nodes followed a Gaussian
probability distribution with mean 0 and standard deviation 1. All this together defined a
Gaussian probability distribution p(V, , L, S) where , L and S denote the error nodes, latent
nodes and selection bias nodes in the DAG (Peña, 2014b). Note that p(V, , L, S) was most
likely to be faithful to the DAG (Spirtes et al., 1993). Then, p(V ∣S) was most likely to be
faithful to the artificial CG corresponding to the DAG (Peña, 2014b). To sample p(V ∣S)
and so obtain the desired sample for our experiments, we used the function cpdist of the R
1www.bnlearn.com
10
Table 7. Results for the artificial CG 1 (15 nodes and 5 directed edges, 4
undirected edges, and 8 bidirected edges).
size
RA
PA
Our algorithm
RT
PT
500
0.72 ± 0.03
0.98 ± 0.04
0.37 ± 0.06
0.90 ± 0.17
1000
0.76 ± 0.03
0.96 ± 0.05
0.45 ± 0.07
0.91 ± 0.14
5000
0.83 ± 0.02
0.98 ± 0.04
0.58 ± 0.04
0.91 ± 0.13
10000
0.84 ± 0.03
0.99 ± 0.03
0.60 ± 0.06
0.96 ± 0.08
50000
0.89 ± 0.04
0.96 ± 0.04
0.67 ± 0.08
0.82 ± 0.12
Table 8. Results for the artificial CG 2 (15 nodes and 3 directed edges, 24
undirected edges, and 5 bidirected edges).
size
RA
PA
Our algorithm
RT
PT
500
0.32 ± 0.04
0.96 ± 0.04
0.13 ± 0.03
0.88 ± 0.12
1000
0.36 ± 0.03
0.99 ± 0.03
0.13 ± 0.02
0.86 ± 0.18
5000
0.45 ± 0.04
0.98 ± 0.03
0.19 ± 0.06
0.80 ± 0.17
10000
0.49 ± 0.05
0.97 ± 0.04
0.25 ± 0.06
0.66 ± 0.14
50000
0.69 ± 0.05
0.99 ± 0.02
0.47 ± 0.06
0.57 ± 0.07
Table 9. Results for the artificial CG 3 (15 nodes and 7 directed edges, 4
undirected edges, and 6 bidirected edges).
size
RA
PA
Our algorithm
RT
PT
500
0.78 ± 0.05
0.99 ± 0.03
0.35 ± 0.08
0.94 ± 0.14
1000
0.82 ± 0.02
1.00 ± 0.00
0.41 ± 0.03
0.99 ± 0.05
5000
0.83 ± 0.03
0.99 ± 0.02
0.42 ± 0.08
0.96 ± 0.11
10000
0.84 ± 0.02
1.00 ± 0.00
0.44 ± 0.07
0.99 ± 0.06
50000
0.92 ± 0.04
1.00 ± 0.02
0.69 ± 0.13
0.98 ± 0.07
package bnlearn, which generates a sample from a probability distribution via probabilistic
logic sampling and then discards the instances in the sample that do not comply with the
evidence provided. In our case, the evidence consisted in instantiating the selections bias
nodes. In particular, we instantiated all the selection bias nodes to the interval [−0.2, 0.2].
This worked fine for the artificial CGs 1 and 3 since they contain only 4 selection bias nodes.
However, it did not work for the artificial CG 2 as it contains 24 selection bias nodes and,
thus, the evidence was so unlikely that most samples were discarded. Therefore, for this
network, we instantiated the selection bias nodes to the interval [−0.9, 0.9]. This means that
the dependencies due to undirected edges are weaker in this case.
From each artificial CG, we obtained 30 samples of size 500, 1000, 5000, 10000 and 50000
as described above. For each sampled size, we ran our algorithm on the corresponding 30
samples and, then, computed the average precision and recall between the adjacencies in the
sampled and learnt graphs, as well as between the triplexes in the sampled and learnt graphs.
We denote the former two measures as PA and RA, and the latter two as PT and RT. We
chose these measures because it is the adjacencies and triplexes what determines the Markov
equivalence class of the MAMP CG learnt (recall Section 3).
Tables 7-9 show the results of our experiments. Broadly speaking, the results are rather
good. The results are worse for the artificial CG 2. This is not surprising since, as explained
above, its undirected edges were weaker. We are currently working on a parameterization for
MAMP CGs that will enable us to sample them directly and solve this problem.
5.2. Experiments with DAGs. In this section, we compare the performance of our algorithm (Table 1) and that by Meek (1995) (Table 6) on samples from probability distributions
that are faithful to DAGs. Therefore, the learning data is tailored to Meek’s algorithm rather
than to ours. Of course, both algorithms should perform similarly on the large sample limit,
11
because DAGs are a subfamily of MAMP CGs. We are however interested in their relative
performance for medium size samples. Since our algorithm tests in line 5 all the separators
that Meek’s algorithm tests and many more, we expect that our algorithm drops more edges
in line 7 and, thus, the edges retained are more likely to be true positive. Therefore, we
expect that our algorithm shows lower recall but higher precision between the adjacencies
in the sampled and learnt graphs. We also expect that our algorithm shows lower recall
between the triplexes in the sampled and learnt graphs because, as discussed before, the
edges involved in a true triplex are more likely to be dropped in our algorithm. Likewise, we
expect that our algorithm shows lower precision between the triplexes in the sampled and
learnt graphs, because dropping a true edge may create a false positive triplex, and this is
more likely to happen in our algorithm. In this section, we try to elucidate the extend of
this decrease in the performance of our algorithm compared to Meek’s. Another way to look
at this question is by noting that, despite the sampled graph belongs to the search spaces
considered by both algorithms, our algorithm considers a much bigger search space, which
implies a larger risk of ending in a suboptimal solution. For instance, the ratio of the numbers
of independence models representable by an AMP or MVR CG and those representable by a
DAG is approximately 7 for 8 nodes, 26 for 11 nodes, and 1672 for 20 nodes (Sonntag and
Peña, 2015). Note that the ratio of the numbers of independence models representable by a
MAMP CG and those representable by a DAG is much larger than the figures given (recall
Example 1). In this section, we try to elucidate the effects that this larger search space has
on the performance of our algorithm.
In the experiments, we considered the following Bayesian networks: Asia (8 nodes and
8 edges), Sachs (11 nodes and 17 edges), Child (20 nodes and 25 edges), Insurance (27
nodes and 52 edges), Mildew (35 nodes and 46 edges), Alarm (37 nodes and 46 edges) and
Barley (48 nodes and 84 edges). All the networks were obtained from the repository at
www.bnlearn.com. All the nodes in these networks represent discrete random variables.
From each network considered, we obtained 30 samples of size 500, 1000, 5000, 10000 and
50000 with the help of the function cpdist of the R package bnlearn. For each sampled size,
we ran our and Meek’s algorithms on the corresponding 30 samples and, then, computed the
average precision and recall between the adjacencies in the sampled and learnt graphs, as
well as between the triplexes in the sampled and learnt graphs. We denote the former two
measures as PA and RA, and the latter two as PT and RT. We chose these measures because
it is the adjacencies and triplexes what determines the Markov equivalence class of the DAG
or MAMP CG learnt (recall Section 3).
Tables 10-16 show the results of our experiments. The entries in bold font correspond to
the cases where the difference in the performance of the algorithms is significant according
to Student’s t-test. For the test, we used the function t.test available in R with a 95 %
confidence interval and parameters alt="two.sided" and var.equal=TRUE. Broadly speaking, the results confirm our expectation of our algorithm scoring lower RA, RT and PT, and
higher PA. However, there are quite a few cases where the results depart from the expectation
and that indicate that our algorithm performs better than expected, specially when it comes
to PT:
● For the Asia network, our algorithm scores comparable or better RT and PT for all
the sample sizes.
● Note that the Sachs network has no triplex and hence the 0.00 ± 0.00 in RT and PT
scored by both algorithms.
● For the Child network, our algorithm scores better RT for the sample size 50000, and
comparable or better PT for the sample sizes 1000-50000.
● For the Insurance network, our algorithm scores comparable RT for the sample sizes
500-5000, and better PT for all the sample sizes.
12
Table 10. Results for the Asia network (8 nodes and 8 directed edges).
size
RA
PA
Our algorithm
RT
PT
RA
PA
Meek’s algorithm
RT
PT
500
0.50 ± 0.00
0.97 ± 0.07
0.25 ± 0.25
0.42 ± 0.46
0.54 ± 0.06
0.84 ± 0.14
0.22 ± 0.25
0.21 ± 0.27
1000
0.52 ± 0.04
0.96 ± 0.08
0.35 ± 0.23
0.63 ± 0.45
0.58 ± 0.06
0.85 ± 0.16
0.37 ± 0.22
0.42 ± 0.33
5000
0.50 ± 0.00
0.99 ± 0.05
0.50 ± 0.00
0.89 ± 0.23
0.67 ± 0.07
0.93 ± 0.10
0.37 ± 0.22
0.51 ± 0.40
10000
0.50 ± 0.00
0.99 ± 0.04
0.50 ± 0.00
0.95 ± 0.15
0.69 ± 0.06
0.93 ± 0.09
0.30 ± 0.25
0.57 ± 0.49
50000
0.62 ± 0.05
0.99 ± 0.03
0.50 ± 0.00
0.90 ± 0.24
0.75 ± 0.00
0.95 ± 0.08
0.43 ± 0.17
0.72 ± 0.37
Table 11. Results for the Sachs network (11 nodes and 17 directed edges).
size
RA
PA
Our algorithm
RT
PT
RA
PA
Meek’s algorithm
RT
PT
500
0.46 ± 0.02
1.00 ± 0.00
0.00 ± 0.00
0.00 ± 0.00
0.73 ± 0.05
0.95 ± 0.05
0.00 ± 0.00
0.00 ± 0.00
1000
0.53 ± 0.04
1.00 ± 0.00
0.00 ± 0.00
0.00 ± 0.00
0.83 ± 0.04
0.99 ± 0.04
0.00 ± 0.00
0.00 ± 0.00
5000
0.65 ± 0.01
1.00 ± 0.00
0.00 ± 0.00
0.00 ± 0.00
0.90 ± 0.04
0.99 ± 0.03
0.00 ± 0.00
0.00 ± 0.00
10000
0.74 ± 0.13
1.00 ± 0.00
0.00 ± 0.00
0.00 ± 0.00
0.88 ± 0.01
1.00 ± 0.02
0.00 ± 0.00
0.00 ± 0.00
50000
0.84 ± 0.03
1.00 ± 0.00
0.00 ± 0.00
0.00 ± 0.00
0.94 ± 0.00
1.00 ± 0.01
0.00 ± 0.00
0.00 ± 0.00
Table 12. Results for the Child network (20 nodes and 25 directed edges).
size
RA
PA
Our algorithm
RT
PT
RA
PA
Meek’s algorithm
RT
PT
500
0.37 ± 0.03
0.98 ± 0.05
0.03 ± 0.08
0.08 ± 0.19
0.72 ± 0.04
0.88 ± 0.06
0.31 ± 0.17
0.20 ± 0.12
1000
0.42 ± 0.03
0.99 ± 0.02
0.18 ± 0.10
0.40 ± 0.23
0.75 ± 0.04
0.89 ± 0.07
0.59 ± 0.20
0.40 ± 0.17
5000
0.55 ± 0.03
1.00 ± 0.00
0.22 ± 0.08
0.49 ± 0.28
0.92 ± 0.00
0.91 ± 0.05
0.77 ± 0.16
0.38 ± 0.12
10000
0.60 ± 0.02
1.00 ± 0.00
0.60 ± 0.00
0.80 ± 0.17
0.92 ± 0.01
0.91 ± 0.05
0.89 ± 0.15
0.52 ± 0.19
50000
0.69 ± 0.02
1.00 ± 0.00
1.00 ± 0.00
0.89 ± 0.19
0.95 ± 0.02
0.87 ± 0.05
0.94 ± 0.12
0.52 ± 0.15
● For the Mildew network, our algorithm scores better RT for the sample size 5000, and
better PT for all the sample sizes.
● For the Alarm network, our algorithm scores better PT for all the sample sizes.
● For the Barley network, our algorithm scores comparable RT for the sample sizes 500
and 50000, and comparable or better PT for all the sample sizes.
Roughly speaking, one could say that our algorithm scores better precision (PA and PT),
whereas Meek’s algorithm scores better recall (RA and RT). Since we do not have any reason
to deem any of the four performance measures in our experiments (i.e. RA, PA, RT and PT)
more important than the others, we can conclude that our algorithm performs relatively well
compared to Meek’s, although Meek’s algorithm is tailored to learning the models sampled
in the experiments whereas our algorithm is tailored to learning much more general models.
Based on our experiments, we therefore recommend to use Meek’s algorithm if it is known
that the model sampled is a DAG. However, if it is known that the model sampled is a MAMP
CG but it is not known whether it is a DAG, then we recommend to use our algorithm: It
13
Table 13. Results for the Insurance network (27 nodes and 52 directed edges).
size
RA
PA
Our algorithm
RT
PT
RA
PA
Meek’s algorithm
RT
PT
500
0.27 ± 0.01
0.96 ± 0.04
0.06 ± 0.03
0.48 ± 0.22
0.41 ± 0.02
0.78 ± 0.05
0.07 ± 0.05
0.15 ± 0.11
1000
0.31 ± 0.02
0.99 ± 0.02
0.13 ± 0.03
0.69 ± 0.18
0.48 ± 0.02
0.80 ± 0.05
0.13 ± 0.06
0.19 ± 0.07
5000
0.38 ± 0.01
1.00 ± 0.00
0.22 ± 0.02
0.72 ± 0.03
0.63 ± 0.02
0.82 ± 0.05
0.24 ± 0.09
0.26 ± 0.11
10000
0.40 ± 0.01
1.00 ± 0.00
0.25 ± 0.00
0.74 ± 0.03
0.69 ± 0.02
0.86 ± 0.05
0.40 ± 0.07
0.41 ± 0.13
50000
0.47 ± 0.01
1.00 ± 0.00
0.28 ± 0.03
0.76 ± 0.04
0.76 ± 0.01
0.86 ± 0.03
0.40 ± 0.07
0.35 ± 0.12
Table 14. Results for the Mildew network (35 nodes and 46 directed edges).
size
RA
PA
Our algorithm
RT
PT
RA
PA
Meek’s algorithm
RT
PT
500
0.07 ± 0.03
0.74 ± 0.11
0.02 ± 0.02
0.46 ± 0.49
0.18 ± 0.03
0.32 ± 0.05
0.04 ± 0.03
0.04 ± 0.03
1000
0.10 ± 0.02
0.78 ± 0.06
0.03 ± 0.02
0.66 ± 0.44
0.16 ± 0.02
0.27 ± 0.04
0.05 ± 0.03
0.03 ± 0.02
5000
0.23 ± 0.02
0.91 ± 0.02
0.08 ± 0.01
0.98 ± 0.08
0.27 ± 0.01
0.42 ± 0.03
0.07 ± 0.02
0.04 ± 0.01
10000
0.33 ± 0.00
0.94 ± 0.00
0.11 ± 0.00
1.00 ± 0.00
0.41 ± 0.00
0.56 ± 0.02
0.12 ± 0.02
0.09 ± 0.02
50000
0.46 ± 0.01
0.96 ± 0.01
0.22 ± 0.01
0.80 ± 0.02
0.59 ± 0.01
0.58 ± 0.01
0.24 ± 0.03
0.16 ± 0.03
Table 15. Results for the Alarm network (37 nodes and 46 directed edges).
size
RA
PA
Our algorithm
RT
PT
RA
PA
Meek’s algorithm
RT
PT
500
0.37 ± 0.03
1.00 ± 0.01
0.11 ± 0.05
0.71 ± 0.19
0.66 ± 0.03
0.83 ± 0.04
0.25 ± 0.06
0.41 ± 0.11
1000
0.45 ± 0.03
1.00 ± 0.00
0.18 ± 0.04
0.74 ± 0.13
0.76 ± 0.02
0.85 ± 0.03
0.31 ± 0.05
0.44 ± 0.09
5000
0.57 ± 0.02
1.00 ± 0.00
0.26 ± 0.04
0.89 ± 0.11
0.91 ± 0.03
0.85 ± 0.04
0.51 ± 0.09
0.56 ± 0.12
10000
0.65 ± 0.03
1.00 ± 0.00
0.34 ± 0.03
0.98 ± 0.04
0.94 ± 0.02
0.84 ± 0.03
0.56 ± 0.13
0.54 ± 0.14
50000
0.71 ± 0.01
1.00 ± 0.00
0.39 ± 0.04
0.99 ± 0.05
0.96 ± 0.01
0.80 ± 0.04
0.50 ± 0.14
0.41 ± 0.14
Table 16. Results for the Barley network (48 nodes and 84 edges).
size
RA
PA
Our algorithm
RT
PT
RA
PA
Meek’s algorithm
RT
PT
500
0.07 ± 0.01
0.75 ± 0.03
0.00 ± 0.00
0.00 ± 0.00
0.19 ± 0.02
0.48 ± 0.05
0.01 ± 0.01
0.02 ± 0.03
1000
0.09 ± 0.01
0.72 ± 0.04
0.02 ± 0.01
0.62 ± 0.39
0.26 ± 0.03
0.53 ± 0.05
0.03 ± 0.02
0.08 ± 0.04
5000
0.23 ± 0.01
0.84 ± 0.03
0.04 ± 0.01
0.65 ± 0.18
0.38 ± 0.01
0.65 ± 0.03
0.08 ± 0.01
0.20 ± 0.03
10000
0.23 ± 0.01
0.82 ± 0.03
0.04 ± 0.00
0.65 ± 0.09
0.39 ± 0.02
0.61 ± 0.03
0.06 ± 0.02
0.13 ± 0.03
50000
0.34 ± 0.00
0.99 ± 0.03
0.12 ± 0.01
0.60 ± 0.09
0.50 ± 0.01
0.65 ± 0.03
0.12 ± 0.03
0.16 ± 0.05
14
guarantees reasonable performance if the model sampled is really a DAG while it accommodates the possibility that the model sampled is a more general MAMP CG. We believe that
this is an interesting trade-off.
6. Discussion
MAMP CGs are a recently introduced family of models that is based on graphs that may
have undirected, directed and bidirected edges. They unify and generalize AMP and MVR
CGs. In this paper, we have presented an algorithm for learning a MAMP CG from a
probability distribution p which is faithful to it. We have also proved that the algorithm is
correct. The algorithm consists of two phases: The first phase aims at learning adjacencies,
whereas the second phase aims at directing some of the adjacencies learnt by applying some
rules. It is worth mentioning that, whereas the rules R1, R2 and R4 only involve three or four
nodes, the rule R3 may involve more. Unfortunately, we have not succeeded so far in proving
the correctness of our algorithm with a simpler R3. Note that the output of our algorithm
would be the same. The only benefit might be a decrease in running time. Finally, we have
implemented and evaluated our algorithm. The evaluation has shown that our algorithm
performs well.
6.1. A Note on the Faithfulness Assumption. The correctness of our algorithm relies
upon the assumption that p is faithful to some MAMP CG. This is a strong requirement that
we would like to weaken, e.g. by replacing it with the milder assumption that p satisfies the
composition property. Specifically, p satisfies the composition property when X ⊥ p Y ∣Z ∧ X ⊥
p W ∣Z ⇒ X ⊥ p Y ∪ W ∣Z for all X, Y , Z and W pairwise disjoint subsets of V . Note that if p
is a Gaussian distribution, then it satisfies the composition property regardless of whether it
is faithful or not to some MAMP CG (Studený, 2005, Corollary 2.4).
When assuming faithfulness is not reasonable, the correctness of a learning algorithm may
be redefined as follows. Given a MAMP CG G, we say that p is Markovian with respect to
G when X ⊥ p Y ∣Z if X ⊥ G Y ∣Z for all X, Y and Z pairwise disjoint subsets of V . We say that
a learning algorithm is correct when it returns a MAMP CG H such that p is Markovian
with respect to H and p is not Markovian with respect to any MAMP CG F such that
I(H) ⊂ I(F ).
Correct algorithms for learning DAGs and LWF CGs under the composition property
assumption exist (Chickering and Meek, 2002; Nielsen et al., 2003; Peña et al., 2014). The
way in which these algorithms proceed (i.e. score+search based approach) is rather different
from that of the algorithm presented in this paper (i.e. constraint based approach). In a
nutshell, they can be seen as consisting of two phases: A first phase that starts from the
empty graph H and adds single edges to it until p is Markovian with respect to H, and a
second phase that removes single edges from H until p is Markovian with respect to H and
p is not Markovian with respect to any graph F such that I(H) ⊂ I(F ). The success of the
first phase is guaranteed by the composition property assumption, whereas the success of the
second phase is guaranteed by the so-called Meek’s conjecture (Meek, 1997). Specifically,
given two DAGs F and H such that I(H) ⊆ I(F ), Meek’s conjecture states that we can
transform F into H by a sequence of operations such that, after each operation, F is a DAG
and I(H) ⊆ I(F ). The operations consist in adding a single edge to F , or replacing F with
a triplex equivalent DAG. Meek’s conjecture was proven to be true by Chickering (2002,
Theorem 4). The extension of Meek’s conjecture to LWF CGs was proven to be true by Peña
et al. (2014, Theorem 1). The extension of Meek’s conjecture to AMP and MVR CGs was
proven to be false by Peña (2014a, Example 1) and Sonntag and Peña (2015), respectively.
Unfortunately, the extension of Meek’s conjecture to MAMP CGs does not hold either, as
the following example illustrates.
15
Example 2. The MAMP CGs F and H below show that the extension of Meek’s conjecture
to MAMP CGs does not hold.
A
B
A
B
A
B
C
D
E C
D
E C
D
E
F
H
F′
We can describe I(F ) and I(H) by listing all the separators between any pair of distinct
nodes. We indicate whether the separators correspond to F or H with a superscript. Specifically,
F
F
F
F
● SAD
= SBE
= SCD
= SDE
= ∅,
F
● SAB = {∅, {C}, {D}, {E}, {C, D}, {C, E}},
F
● SAC
= {∅, {B}, {E}, {B, E}},
F
● SAE
= {∅, {B}, {C}, {B, C}},
F
● SBC = {∅, {A}, {D}, {A, D}, {A, D, E}},
F
● SBD
= {∅, {A}, {C}, {A, C}}, and
F
● SCE = {{A, D}, {A, B, D}}.
Likewise,
H
H
H
H
H
● SAD
= SBD
= SBE
= SCD
= SDE
= ∅,
H
● SAB = {∅, {C}, {E}, {C, E}},
H
● SAC
= {∅, {B}, {E}, {B, E}},
H
● SAE = {∅, {B}, {C}, {B, C}},
H
● SBC
= {{A, D}, {A, D, E}}, and
H
● SCE = {{A, D}, {A, B, D}}.
H
F
Then, I(H) ⊆ I(F ) because SXY
⊆ SXY
for all X, Y ∈ {A, B, C, D, E} with X ≠ Y . Moreover, the MAMP CG F ′ above is the only MAMP CG that is triplex equivalent to F , whereas
there is no MAMP CG that is triplex equivalent to H. Obviously, one cannot transform F or
F ′ into H by adding a single edge.
While the example above compromises the development of score+search learning algorithms
that are correct and efficient under the composition property assumption, it is not clear to us
whether it also does it for constraint based algorithms. This is something we plan to study.
Acknowledgments
We thank the Reviewers and Editors for their comments, which have helped us to improve
this work. We thank Dag Sonntag for pointing out a mistake in the experimental setting of
an earlier version of this paper. The first author is supported by the Center for Industrial
Information Technology (CENIIT) and a so-called career contract at Linköping University,
and by the Swedish Research Council (ref. 2010-4808). The second author is supported by
the Spanish Ministry of Economy and Competitiveness under project TIN2013-46638-C3-2-P
and by the European Regional Development Fund (FEDER).
Appendix: Proof of Correctness
This appendix is devoted to prove that the algorithm for learning MAMP CGs in Table 1
is correct. We start by proving some auxiliary results.
Lemma 1. After line 8, G and H have the same adjacencies.
Proof. Consider any pair of nodes A and B in G. If A ∈ adG (B), then A ⊥/ p B∣S for all
S ⊆ V ∖ {A, B} by the faithfulness assumption. Consequently, A ∈ adH (B) at all times.
On the other hand, if A ∉ adG (B), then A⊥ p B∣paG (A) or A⊥ p B∣neG (A) ∪ paG (A ∪ neG (A))
(Peña, 2014b, Theorem 5). Note that, as shown before, neG (A)∪paG (A∪neG (A)) ⊆ [adH (A)∪
16
adH (adH (A))]∖{A, B} at all times. Therefore, there exists some S in line 5 such that A⊥ p B∣S
and, thus, the edge A − B will be removed from H in line 7. Consequently, A ∉ adH (B) after
line 8.
Lemma 2. The rules R1-R4 block the end of an edge only if the edge is not a directed edge
in G pointing in the direction of the block.
Proof. According to the antecedent of R1, G has a triplex ({A, C}, B). Then, G has an
induced subgraph of the form A ⊸
←B←
⊸ C, A ⊸
← B − C or A − B ←
⊸ C. In either case, the
consequent of R1 holds.
According to the antecedent of R2, (i) G does not have a triplex ({A, C}, B), (ii) A ⊸
←B
or A − B is in G, (iii) B ∈ adG (C), and (iv) A ∉ adG (C). Then, B → C or B − C is in G. In
either case, the consequent of R2 holds.
According to the antecedent of R3, (i) G has a path from A to B with no directed edge
pointing in the direction of A, and (ii) A ∈ adG (B). Then, A ← B cannot be in G because G
has no semidirected cycle. Then, the consequent of R3 holds.
According to the antecedent of R4, neither B → C nor B → D are in G. Assume to the
contrary that A ← B is in G. Then, G must have an induced subgraph of one of the following
forms:
C
A
C
B
D
A
C
B
D
A
C
B
D
A
B
D
because, otherwise, G has a semidirected cycle. However, either case contradicts that
A ∈ SCD .
Lemma 3. After line 11, H has a block at the end of an edge only if the edge is not a directed
edge in G pointing in the direction of the block.
Proof. In Lemma 2, we have proved that any of the rules R1-R4 blocks the end of an edge
only if the edge is not a directed edge in G pointing in the direction of the block. Of course,
for this to hold, every block in the antecedent of the rule must be on the end of an edge that
is not a directed edge in G pointing in the direction of the block. This implies that, after line
9, H has a block at the end of an edge only if the edge is not a directed edge in G pointing
in the direction of the block, because H has no blocks before line 9. However, to prove that
this result also holds after line 11, we have to prove that line 10 blocks the end of an edge in
H only if the edge is not a directed edge in G pointing in the direction of the block. To do
so, consider any cycle ρH in H that is of length greater than three, chordless, and without
blocks. Let ρG denote the cycle in G corresponding to the sequence of nodes in ρH . Note
that no edge in ρH can be directed or bidirected in ρG because, otherwise, a subroute of the
form A ⊸
←B←
⊸ C or A ⊸
← B − C exists in ρG since G has no directed cycle. This implies
that G contains a triplex ({A, C}, B) because A and C cannot be adjacent in G since ρG is
chordless, which implies that A z
⊸B⊸
z C is in H by R1 in line 9, which contradicts that ρH
has no blocks. Therefore, every edge in ρH is undirected in ρG and, thus, line 10 blocks the
end of an edge in H only if the edge is not a directed edge in G pointing in the direction of
the block.
Lemma 4. After line 11, H does not have any induced subgraph of the form
A
B
C
.
Proof. Assume to the contrary that the lemma does not hold. We interpret the execution
of lines 9-11 as a sequence of block addings and, for the rest of the proof, one particular
sequence of these block addings is fixed. Fixing this sequence is a crucial point upon which
some important later steps of the proof are based. Since there may be several induced
subgraphs of H of the form under study after lines 9-11, let us consider any of the induced
17
subgraphs A B C that appear firstly during execution of lines 9-11 and fix it for the
rest of the proof. Now, consider the following cases.
Case 0: Assume that A z
x B is in H due to line 10. Then, after line 10, H had
an induced subgraph of one of the following forms, where possible additional edges
between C and internal nodes of the route A z
x ... z
x D are not shown:
A
B
C
A
...
B
C
...
D
case 0.1
D
case 0.2
Note that C cannot belong to the route A z
⊸ ... z
⊸ D because, otherwise, the cycle
Az
⊸ ... z
⊸Dz
⊸ B ⊸ A would not have been chordless.
Case 0.1: If B ∉ SCD then B ⊸
z C is in H by R1, else B z
⊸ C is in H by R2.
Either case is a contradiction.
Case 0.2: Recall from line 10 that the cycle A z
x ... z
xDz
xBz
x A is of length
greater than three and chordless, which implies that there is no edge between A
and D in H. Thus, if C ∉ SAD then A z
⊸ C is in H by R1, else B ⊸
z C is in H
by R4. Either case is a contradiction.
Case 1: Assume that A z
⊸ B is in H due to R1. Then, after R1 was applied to A ⊸
⊸ B,
H had an induced subgraph of one of the following forms:
A
B
C
A
D
case 1.1
B
C
D
case 1.2
Case 1.1: If B ∉ SCD then B ⊸
z C is in H by R1, else B z
⊸ C is in H by R2.
Either case is a contradiction.
Case 1.2: If C ∉ SAD then A z
⊸ C is in H by R1, else B ⊸
z C is in H by R4.
Either case is a contradiction.
Case 2: Assume that A z
⊸ B is in H due to R2. Then, after R2 was applied to A ⊸
⊸ B,
H had an induced subgraph of one of the following forms:
A
B
D
C
A
B
D
case 2.1
C
A
B
D
case 2.2
C
A
B
C
D
case 2.3
case 2.4
Case 2.1: If A ∉ SCD then A ⊸
z C is in H by R1, else A z
⊸ C is in H by R2. Either
case is a contradiction.
Case 2.2: Note that D A C cannot be an induced subgraph of H after lines
9-11 because, otherwise, it would contradict the assumption that A B C
is one of the firstly induced subgraph of that form that appeared during the
execution of lines 9-11. Then, A z
⊸ C, A x C, D ⊸
z C or D z C must be in H
after lines 9-11. However, either of the first two cases is a contradiction. The third
case can be reduced to Case 2.3 as follows. The fourth case can be reduced to
Case 2.4 similarly. The third case implies that the block at C in D ⊸
z C is added
at some moment in the execution of lines 9-11. This moment must happen later
than immediately after adding the block at A in A z
⊸ B, because immediately
after adding this block the situation is the one depicted by the above figure for
Case 2.2. Then, when the block at C in D ⊸
z C is added, the situation is the one
depicted by the above figure for Case 2.3.
18
Case 2.3: Assume that the situation of this case occurs at some moment in the
z C is in H by R3 after lines 9-11, which is a
execution of lines 9-11. Then, A ⊸
contradiction.
Case 2.4: Assume that the situation of this case occurs at some moment in the
execution of lines 9-11. If C ∉ SBD then B z
⊸ C is in H by R1 after lines 9-11,
else B ⊸
z C is in H by R2 after lines 9-11. Either case is a contradiction.
Case 3: Assume that A z
⊸ B is in H due to R3. Then, after R3 was applied to A ⊸
⊸ B,
H had a subgraph of one of the following forms, where possible additional edges
between C and internal nodes of the route A z
⊸ ... z
⊸ D are not shown:
A
B
...
D
case 3.1
C
A
B
...
D
case 3.2
C
A
B
...
D
case 3.3
C
A
B
C
...
D
case 3.4
Note that C cannot belong to the route A z
⊸ ... z
⊸ D because, otherwise, R3 could
not have been applied since the cycle A z
⊸ ... z
⊸Dz
⊸ B ⊸ A would not have been
chordless.
Case 3.1: If B ∉ SCD then B ⊸
z C is in H by R1, else B z
⊸ C is in H by R2.
Either case is a contradiction.
Case 3.2: Note that D B C cannot be an induced subgraph of H after lines
9-11 because, otherwise, it would contradict the assumption that A B C
is one of the firstly induced subgraph of that form that appeared during the
execution of lines 9-11. Then, B z
⊸ C, B x C, D ⊸
z C or D z C must be in H
after lines 9-11. However, either of the first two cases is a contradiction. The third
case can be reduced to Case 3.3 as follows. The fourth case can be reduced to
Case 3.4 similarly. The third case implies that the block at C in D ⊸
z C is added
at some moment in the execution of lines 9-11. This moment must happen later
than immediately after adding the block at A in A z
⊸ B, because immediately
after adding this block the situation is the one depicted by the above figure for
Case 3.2. Then, when the block at C in D ⊸
z C is added, the situation is the one
depicted by the above figure for Case 3.3.
Case 3.3: Assume that the situation of this case occurs at some moment in the
execution of lines 9-11. Then, B ⊸
z C is in H by R3 after lines 9-11, which is a
contradiction.
Case 3.4: Assume that the situation of this case occurs at some moment in the
execution of lines 9-11. Note that C is not adjacent to any node of the route A z
⊸
... z
⊸ D besides A and D. To see it, assume to the contrary that C is adjacent
to some nodes E1 , . . . , En ≠ A, D of the route A z
⊸ ... z
⊸ D. Assume without
loss of generality that Ei is closer to A in the route than Ei+1 for all 1 ≤ i < n.
Now, note that En z
⊸ C must be in H by R3 after lines 9-11. This implies that
En−1 z
⊸ C must be in H by R3 after lines 9-11. By repeated application of this
argument, we can conclude that E1 z
⊸ C must be in H after lines 9-11 and, thus,
Az
⊸ C must be in H by R3 after lines 9-11, which is a contradiction. Therefore,
if C is not adjacent to any node of the route A z
⊸ ... z
⊸ D besides A and D,
then the cycle A z
⊸ ... z
⊸ D z C − A is chordless and, thus, A z
⊸ C must be in
H by R3 after lines 9-11, which is a contradiction.
⊸ B,
Case 4: Assume that A z
⊸ B is in H due to R4. Then, after R4 was applied to A ⊸
H had an induced subgraph of one of the following forms:
19
A
B
C
A
B
C
A
B
C
A
B
C
D
D
D
D
E
case 4.1
E
case 4.2
E
case 4.3
E
case 4.4
Cases 4.1-4.3: If B ∉ SCD or B ∉ SCE then B ⊸
z C is in H by R1, else B z
⊸ C is
in H by R2. Either case is a contradiction.
Case 4.4: Assume that C ∈ SDE . Then, B ⊸
z C is in H by R4, which is a contradiction. On the other hand, assume that C ∉ SDE . Then, it follows from applying
R1 that H has an induced subgraph of the form
A
B
C
D
E
Note that A ∈ SDE because, otherwise, R4 would not have been applied. Then,
Az
⊸ C is in H by R4, which is a contradiction.
Lemma 5. After line 11, every chordless cycle ρ ∶ V1 , . . . , Vn = V1 in H that has an edge
Vi z Vi+1 also has an edge Vj x Vj+1 .
Proof. Assume for a contradiction that ρ is of the length three such that V1 z V2 occur
and neither V2 x V3 nor V1 z V3 occur. Note that V2 z
x V3 cannot occur either because,
otherwise, V1 z
⊸ V3 must occur by R3. Since V1 z V3 contradicts the assumption, then
V1 z
x V3 must occur. However, this implies that V1 z
x V2 must occur by R3, which contradicts
the assumption. Similarly, V1 z
x V3 cannot occur either. Then, ρ is of one of the following
forms:
V1
V2
V3
V1
V2
V3
V1
V2
V3
The first form is impossible by Lemma 4. The second form is impossible because, otherwise,
V2 ⊸
z V3 would occur by R3. The third form is impossible because, otherwise, V1 z V3 would
be occur by R3. Thus, the lemma holds for cycles of length three.
Assume for a contradiction that ρ is of length greater than three and has an edge Vi z Vi+1
but no edge Vj x Vj+1 . Note that if Vl z
⊸ Vl+1 ⊸
⊸ Vl+2 is a subroute of ρ, then either Vl+1 z
⊸ Vl+2
or Vl+1 x Vl+2 is in ρ by R1 and R2. Since ρ has no edge Vj x Vj+1 , Vl+1 z
⊸ Vl+2 is in ρ. By
repeated application of this reasoning together with the fact that ρ has an edge Vi z Vi+1 , we
can conclude that every edge in ρ is Vk z
⊸ Vk+1 . Then, by repeated application of R3, observe
that every edge in ρ is Vk z
x Vk+1 , which contradicts the assumption.
Lemma 6. If H has an induced subgraph of the form
induced subgraph must actually be of the form
A
B
A
C
B
,
after line 11, then the
C
A
B
Proof. Lemmas 4 and 5 together with R3 rule out any other possibility.
C
or
A
B
C
.
Lemma 7. All the undirected edges in H at line 18 that are of the form z
x after line 11 are
undirected edges in G.
Proof. The undirected edges in H at line 18 that are of the form z
x after line 11 are those
added to H in lines 14 and 16. We first prove that the undirected edges added to H in line
20
14 are undirected edges in G. Any undirected edges A − B and B − C added to H in line 14
imply that H has an induced subgraph A z
xBz
x C with B ∈ SAC after line 11, which implies
that (i) A and B as well as B and C are adjacent in G whereas A and C are not adjacent in
G by Lemma 1, and (ii) G has no directed edge between A and B or B and C by Lemma 3.
Then, A − B − C must be in G because B ∈ SAC .
We now prove that the undirected edges added to H in line 16 are undirected edges in G.
As shown in the paragraph above, the result holds after having executed line 16 zero times.
Assume as induction hypothesis that the result also holds after having executed line 16 n
times. When line 16 is executed for the (n + 1)-th time, H has an induced subgraph of the
form A B C . This implies that H has an induced subgraph of the form A B C
after line 11, which implies that the induced subgraph is actually of the form A B C
by Lemma 6. Then, the undirected edges B − C and A − C have been added to H in previous
executions of lines 14 and 16. Then, B − C and A − C are in G by the induction hypothesis
and, thus, A − B must be in G too due to the constraint C2. Consequently, the desired result
holds after having executed line 16 n + 1 times.
Lemma 8. At line 18, G and H have the same triplexes.
Proof. We first prove that any triplex in H at line 18 is in G. Assume to the contrary that
H at line 18 has a triplex ({A, C}, B) that is not in G. This is possible if and only if H has
an induced subgraph of one of the following forms after line 11:
A
B
C
A
B
C
A
B
C
A
B
C
A
B
C
Note that the induced subgraphs above together with Lemma 1 imply that A is adjacent
to B in G, B is adjacent to C in G, and A is not adjacent to C in G. This together with
the assumption made above that G has no triplex ({A, C}, B) implies that B ∈ SAC . Now,
note that the first and third induced subgraphs above are impossible because, otherwise,
A⊸
z B would be in H by R2. Likewise, the second and fourth induced subgraphs above are
impossible because, otherwise, B z
⊸ C would be in H by R2. Now, note that any triplex that
is added to H in line 13 due to the fifth induced subgraph above is removed from H in line
14 because, as shown above, B ∈ SAC . Finally, note that no triplex is added to H in lines
15-17.
We now prove that any triplex ({A, C}, B) in G is in H at line 18. Note that B ∉ SAC .
Consider the following cases.
Case 1: Assume that the triplex in G is of the form A → B ⊸
⊸ C (respectively A ⊸
⊸
B ← C). Then, after line 11, A z B ⊸
z C (respectively A z
⊸ B x C) is in H by
Lemmas 1 and 3. Then, the triplex is added to H in lines 12-13. Moreover, the
triplex added is of the form A → B ⊸
⊸ C (respectively A ⊸
⊸ B ← C) and, thus, it
does not get removed from H in lines 14-17, because all these lines do is replacing
bidirected edges in H with undirected edges.
⊸ C or A ⊸
⊸ B ↔ C.
Case 2: Assume that the triplex in G is of the form A ↔ B ⊸
Then, after line 11, A z
⊸B⊸
z C is in H by Lemmas 1 and 3. Then, the triplex is
added to H in lines 12-13. Moreover, the triplex cannot get removed from H in lines
14-17. To see it, consider the following cases.
Case 2.1: Assume that the subgraph A z
⊸B⊸
z C in H after line 11 is actually of
the form A z B ⊸
z C or A z
⊸ B x C. Then, the triplex does not get removed
from H in lines 14-17, because all these lines do is replacing bidirected edges in
H with undirected edges.
Case 2.2: Assume that the subgraph A z
⊸B⊸
z C in H after line 11 is actually of
the form A z
xBz
x C. Note that all lines 14-17 do is replacing bidirected edges
in H with undirected edges. Therefore, the triplex gets removed from H only if
21
A − B − C is in H at line 18. However, this implies that A − B − C is in G by
Lemma 7, which is a contradiction.
It is worth noting that one may think that Lemma 4 implies that H does not have any
induced subgraph of the form A B C after line 14 and, thus, that lines 15-17 are not
needed. However, this is wrong as the following example illustrates.
Example 3. The MAMP CG G below shows that lines 15-17 are necessary.
A
C
D
B
F
E
G
I
A
C
D
B
F
E
H after line 11
I
A
C
D
B
F
E
I
H after line 14
We are now ready prove the correctness of our algorithm.
Theorem 1. At line 18, H is a MAMP CG that is Markov equivalent to G.
Proof. First, note that Lemmas 1 and 8 imply that H at line 18 has the same adjacencies
and triplexes as G.
Now, we show that H at line 18 satisfies the constraint C1. Lemma 5 implies that H has no
semidirected chordless cycle after line 13. This implies that H has no semidirected chordless
cycle at line 18, because all lines 14-17 do is replacing bidirected edges in H with undirected
edges. To see that this in turn implies that H has no semidirected cycle at line 18, assume
to the contrary that H has no semidirected chordless cycle but it has a semidirected cycle
ρ ∶ V1 , . . . , Vn = V1 with a chord between Vi and Vj with i < j. Then, divide ρ into the cycles
ρL ∶ V1 , . . . , Vi , Vj , . . . , Vn = V1 and ρR ∶ Vi , . . . , Vj , Vi . Note that ρL or ρR is a semidirected
cycle. Then, H has a semidirected cycle that is shorter than ρ. By repeated application
of this reasoning, we can conclude that H has a semidirected chordless cycle, which is a
contradiction.
Now, we show that H at line 18 satisfies the constraint C2. Assume to the contrary that H
has a cycle ρ ∶ V1 , . . . , Vn = V1 such that V1 ↔ V2 is in H and Vi − Vi+1 is in H for all 1 < i < n.
Note that ρ must be of length greater than three by lines 15-17, i.e. n > 3. Note also that
that V1 ↔ V2 is in H at line 18 implies that V1 z
x V2 is in H at line 11. Consider the following
cases.
Case 1: Assume that V1 and V3 are not adjacent in H at line 18. Then, V2 z
⊸ V3 or
V2 ⊸
z V3 is in H after line 11 by R1 or R2. In fact, V2 z
x V3 must be in H after line
11 because, otherwise, V2 → V3 or V2 ← V3 is in H at line 18, which is a contradiction.
Case 2: Assume that V1 and V3 are adjacent in H at line 18. That V2 − V3 is in H at
line 18 implies that V1 z
x V2 z
x V3 or V1 z
x V2 − V3 is in H at line 11. In fact, V2 z
x V3
must be in H after line 11 by Lemma 6.
In either case above, V2 z
x V3 is in H after line 11 and, thus, V2 −V3 is in G by Lemma 7. By
repeated application of this argument, we can conclude that Vi − Vi+1 is in G for all 2 < i < n,
which implies that V1 − V2 is also in G by the constraints C1 and C2. This implies that V1
and V3 are adjacent in G because, otherwise, G and H have not the same triplexes, which
contradicts Lemma 8. Then, V1 and V3 are adjacent in H by Lemma 1. In fact, V1 ↔ V3 must
be in H because, otherwise, H has a cycle of length three that violates the constraint C1 or
C2 which, as shown above, is a contradiction. Then, H has a cycle that violates the constraint
C2 and that is shorter than ρ, namely V1 , V3 , . . . , Vn = V1 . By repeated application of this
reasoning, we can conclude that H has a cycle of length three that violates the constraint C2
which, as shown above, is a contradiction.
Finally, we show that H at line 18 satisfies the constraint C3. Assume to the contrary
that, at line 18, V1 − V2 − V3 is in H, V2 ↔ V4 is in H, but V1 − V3 is not in H. We show below
22
that G (respectively H at line 18) has the graph to the left (respectively right) below as an
induced subgraph.
V4
V1
V2
V4
V3
V1
V2
V3
That V1 − V2 − V3 is in H at line 18 but V1 − V3 is not implies that V1 and V3 cannot be
adjacent in H because, otherwise, H violates the constraint C1 or C2 which, as shown above,
is a contradiction. This implies that V1 and V3 are not adjacent in G either by Lemma 1.
Consider the following cases.
Case 1: Assume that V1 and V4 are not adjacent in H at line 18. That V2 ↔ V4 is in
H at line 18 implies that V2 z
x V4 is in H after line 11 and, thus, that V1 z
⊸ V2 or
V1 ⊸
z V2 is in H after line 11 by R1 or R2. In fact, V1 z
x V2 must be in H after line
11 because, otherwise, V1 → V2 or V1 ← V2 is in H at line 18, which is a contradiction.
Then, V1 − V2 is in G by Lemma 7.
Case 2: Assume that V1 and V4 are adjacent in H at line 18. That V1 − V2 ↔ V4 is in
H at line 18 implies that V1 z
x V2 z
x V4 or V1 − V2 z
x V4 is in H after line 11. In fact,
V1 z
x V2 must be in H after line 11 by Lemma 6. Then, V1 − V2 is in G by Lemma 7.
In either case above, V1 − V2 is in G. Likewise, V2 − V3 is in G. That V2 ↔ V4 is in H at line
18 implies that V2 z
x V4 is in H after line 11, which implies that V2 − V4 or V2 ↔ V4 is in G by
Lemmas 1 and 3. In fact, V2 − V4 must be in G because, otherwise, G violates the constraint
C3 since, as shown above, V1 − V2 − V3 is in G but V1 − V3 is not. Finally, note that V1 and V4
as well as V3 and V4 must be adjacent in G and H because, otherwise, H at line 18 does not
have the same triplexes as G, which contradicts Lemma 8. Specifically, V1 − V4 − V3 must be
in G and V1 ↔ V4 ↔ V3 must be in H because, otherwise, G or H violates the constraint C1
or C2 which, as shown above, is a contradiction.
However, that G (respectively H at line 18) has the graph to the left (respectively right)
above as an induced subgraph implies that H has a triplex ({V1 , V3 }, V4 ) that G has not,
which contradicts Lemma 8. Then, V1 and V3 must be adjacent in H which, as shown above,
is a contradiction.
Theorem 2. At line 18, H is the EG of the Markov equivalence class of G.
Proof. Let K denote the graph that contains all and only the edges in H at line 18 that have
a block in H after line 11, and let U denote the graph that contains the rest of the edges in
H at line 18. Note that every edge in K is undirected, directed or bidirected, whereas every
edge in U is undirected. Note also that the edges in U correspond to the edges without blocks
in H after line 11. Therefore, U has no cycle of length greater than three that is chordless
by line 10. In other words, U is chordal. Then, we can orient all the edges in U without
creating triplexes nor directed cycles by using, for instance, the maximum cardinality search
algorithm (Koller and Friedman, 2009, p. 312). Consider any such orientation of the edges
in U and denote it D. Now, add all the edges in D to K. We show below that K is a MAMP
CG that is triplex equivalent to H.
First, we show that K is triplex equivalent to H. Assume the contrary. Clearly, K, H and
G have the same adjacencies by Theorem 1. Then, consider the following cases.
Case 1: Assume that K has a triplex ({A, C}, B) that is not in H. Then, the triplex is
not in G either by Theorem 1 and, thus, B ∈ SAC . Moreover, recall from above that D
has no triplex. Then, both edges in the triplex ({A, C}, B) cannot be in D. Note also
that both edges in the triplex ({A, C}, B) cannot be outside D because, otherwise,
the triplex is in H. Then, the triplex ({A, C}, B) has one edge in D, say the one
between A and B, and the other edge outside D. This implies that A − B ⊸
z C is in
H after line 11, which implies that A ⊸
z B is in H after line 11 by R2 because, as
shown above, B ∈ SAC . This is a contradiction.
23
Case 2: Assume that H has a triplex ({A, C}, B) that is not in K. Then, the triplex
is also in G by Theorem 1 and, thus, B ∉ SAC . Moreover, recall from above that D
has no triplex. Then, both edges in the triplex ({A, C}, B) cannot be in U . Note also
that both edges in the triplex ({A, C}, B) cannot be outside U because, otherwise,
the triplex is in K. Then, the triplex ({A, C}, B) has one edge in U , say the one
between A and B, and the other edge outside D. This implies that A − B ⊸
z C is in
H after line 11, which implies that A z
⊸ B is in H after line 11 by R1 because, as
shown above, B ∉ SAC . This is a contradiction.
Now, we show that K satisfies the constraint C1. Assume to the contrary that there is a
semidirected cycle ρ in K. Note that ρ must include some edges that are not in D because,
as defined above, D is a DAG. Then, ρ includes some edges that are of the form z or z
x after
line 11. Consider the following cases.
Case 1: Assume that ρ includes an edge of the form z after line 11. Then, ρ cannot
be chordless by Lemma 5 because, otherwise, ρ includes an edge of the form x, which
contradicts that ρ is a semidirected cycle by line 12. Then, let ρ ∶ V1 , . . . , Vn = V1
have a chord between Vi and Vj with i < j. Then, divide ρ into the cycles ρL ∶
V1 , . . . , Vi , Vj , . . . , Vn = V1 and ρR ∶ Vi , . . . , Vj , Vi . Note that ρL or ρR is a semidirected
cycle. Then, H has a semidirected cycle that is shorter than ρ. By repeated application of this reasoning, we can conclude that H has a semidirected chordless cycle,
which contradicts Lemma 5.
Case 2: Assume that ρ includes an edge of the form z
x and no edge of the form z after
line 11. Note that ρ must include an edge of D because, otherwise, all the edges in ρ
are undirected or bidirected, which is a contradiction. Then, H has a subgraph of the
form A − B z
x C after line 11. Moreover, A and C must be adjacent in H because,
otherwise, A z
⊸ B or A ⊸
z B is in H after line 11 by R1 or R2, which contradicts that
A − B is in H after line 11. That A − B z
x C is in H after line 11 together with the
fact that A and C are adjacent in H contradict Lemma 6.
Now, we show that K satisfies the constraint C2. Note that the only difference between
K and H is that the former may contain a directed edge where the latter has an undirected
edge. Therefore, K cannot have other cycles that violate the constraint C2 beside those H
has, which are none.
Finally, we show that K satisfies the constraint C3. Assume to the contrary that V1 −V2 −V3
is in K, V2 ↔ V4 is in K, but V1 −V3 is not in K. We show below that H at line 18 (respectively
K) has the graph to the left (respectively right) below as an induced subgraph.
V4
V1
V2
V4
V3
V1
V2
V3
That V1 − V2 − V3 is in K but V1 − V3 is not implies that V1 and V3 cannot be adjacent
in K because, otherwise, K violates the constraint C1 or C2 which, as shown above, is a
contradiction. This implies that V1 and V3 are not adjacent in H at line 18 either, because
H and K have the same adjacencies. Consider the following cases.
Case 1: Assume that V1 and V4 are not adjacent in K. That V2 ↔ V4 is in K implies
that V2 z
x V4 is in H after line 11 and, thus, that V1 z
⊸ V2 or V1 ⊸
z V2 is in H after
line 11 by R1 or R2. In fact, V1 z
x V2 must be in H after line 11 because, otherwise,
V1 → V2 or V1 ← V2 is in H at line 18 and thus in K, which is a contradiction. Then,
V1 − V2 is in H at line 18 by definition of K.
Case 2: Assume that V1 and V4 are adjacent in K. That V1 − V2 ↔ V4 is in K implies
that V1 z
x V2 z
x V4 or V1 − V2 z
x V4 is in H after line 11. In fact, V1 z
x V2 must be in
H after line 11 by Lemma 6. Then, V1 − V2 is in H at line 18 by definition of K.
24
In either case above, V1 − V2 is in H at line 18. Likewise, V2 − V3 is in H at line 18. That
V2 ↔ V4 is in K implies that V2 z
x V4 is in H after line 11, which implies that V2 − V4 or
V2 ↔ V4 is in H at line 18. In fact, V2 − V4 must be in H because, otherwise, H violates the
constraint C3 since, as shown above, V1 − V2 − V3 is in H but V1 − V3 is not. Finally, note that
V1 and V4 as well as V3 and V4 must be adjacent in H at line 18 and K because, otherwise, K
does not have the same triplexes as H which, as shown above, is a contradiction. Specifically,
V1 −V4 −V3 must be in H and V1 ↔ V4 ↔ V3 must be in K because, otherwise, H or K violates
the constraint C1 or C2 which, as shown above, is a contradiction.
However, that H at line 18 (respectively K) has the graph to the left (respectively right)
above as an induced subgraph implies that K has a triplex ({V1 , V3 }, V4 ) that H has not
which, as shown above, is a contradiction. Then, V1 and V3 must be adjacent in K which, as
shown above, is a contradiction.
Consequently, K is a MAMP CG that is triplex equivalent to H and, thus, to G by Theorem
1. Now, let us recall how the maximum cardinality search algorithm works. It first unmarks
all the nodes in U and, then, iterates through the following step until all the nodes are marked:
Select any of the unmarked nodes with the largest number of marked neighbors and mark it.
Finally, the algorithm orients every edge in U away from the node that was marked earlier.
Clearly, any node can get marked firstly by the algorithm because there is a tie among all
the nodes in the first iteration, which implies that either orientation of any edge can occur
in D and thus in K. Therefore, either orientation of every edge of U occurs in a MAMP
CG K that is triplex equivalent to G. Consequently, the edges in U are in the EG of the
Markov equivalence class of G. Recall that the edges in U are all undirected but that they
may not be all the undirected edges in H. Specifically, any edge A − B in H after line 18 that
is not in U corresponds to an edge A z
x B in H after line 11. This implies that A − B is in
the EG of the Markov equivalence class of G, because Lemma 7 remains valid if we replace
in it G with any other member of the Markov equivalence class of G. Likewise, any edge
A → B (respectively A ↔ B) in H after line 18 corresponds to an edge A z B (respectively
Az
x B) in H after line 11. This implies that A → B (respectively A ↔ B) is in the EG of the
Markov equivalence class of G because A → B (respectively A ↔ B) is in a member of the
class, namely H, and A ← B (respectively A → B and A ← B) is in no member of the class,
since Lemma 3 remains valid if we replace in it G with any other member of the Markov
equivalence class of G. Consequently, the EG of the Markov equivalence class of G has the
same edges as H.
References
Andersson, S. A., Madigan, D. and Perlman, M. D. A Characterization of Markov Equivalence
Classes for Acyclic Digraphs. The Annals of Statistics, 25:505-541, 1997.
Andersson, S. A., Madigan, D. and Perlman, M. D. Alternative Markov Properties for Chain
Graphs. Scandinavian Journal of Statistics, 28:33-85, 2001.
Andersson, S. A. and Perlman, M. D. Characterizing Markov Equivalent Classes for AMP
Chain Graph Models. The Annals of Statistics, 34:939-972, 2006.
Cano, A., Gómez-Olmedo, M. and Moral, S. A Score Based Ranking of the Edges for the
PC Algorithm. In Proceedings of the 4th European Workshop on Probabilistic Graphical
Models, 41-48, 2008.
Chickering, D. M. Optimal Structure Identification with Greedy Search. Journal of Machine
Learning Research, 3:507-554, 2002.
Chickering, D. M. and Meek, C. Finding Optimal Bayesian Networks. In Proceedings of 18th
Conference on Uncertainty in Artificial Intelligence, 94-102, 2002.
Colombo, D. and Maathuis, M. H. Order-Independent Constraint-Based Causal Structure
Learning. Journal of Machine Learning Research, 15:3741-3782, 2014.
25
Cox, D. R. and Wermuth, N. Multivariate Dependencies - Models, Analysis and Interpretation. Chapman & Hall, 1996.
Koller, D. and Friedman, N. Probabilistic Graphical Models. MIT Press, 2009.
Koster, J. T. A. Marginalizing and Conditioning in Graphical Models. Bernoulli, 8:817-840,
2002.
Lauritzen, S. L. Graphical Models. Oxford University Press, 1996.
Ma, Z., Xie, X. and Geng, Z. Structural Learning of Chain Graphs via Decomposition. Journal
of Machine Learning Research, 9:2847-2880, 2008.
Meek, C. Causal Inference and Causal Explanation with Background Knowledge. In Proceedings of 11th Conference on Uncertainty in Artificial Intelligence, 403-418, 1995.
Meek, C. Graphical Models: Selecting Causal and Statistical Models. PhD thesis, Carnegie
Mellon University, 1997.
Nielsen, J. D., Kočka, T. and Peña, J. M. On Local Optima in Learning Bayesian Networks.
In Proceedings of the 19th Conference on Uncertainty in Artificial Intelligence, 435-442,
2003.
Peña, J. M. Learning AMP Chain Graphs and some Marginal Models Thereof under Faithfulness. International Journal of Approximate Reasoning, 55:1011-1021, 2014a.
Peña, J. M. Marginal AMP Chain Graphs. International Journal of Approximate Reasoning,
55:1185-1206, 2014b.
Peña, J. M. Learning Marginal AMP Chain Graphs under Faithfulness. In Proceedings of the
7th European Workshop on Probabilistic Graphical Models, 382-395, 2014c.
Peña, J. M., Sonntag, D. and Nielsen, J. D. An Inclusion Optimal Algorithm for Chain
Graph Structure Learning. In Proceedings of the 17th International Conference on Artificial
Intelligence and Statistics, 778-786, 2014.
Ramsey, J., Spirtes, P. and Zhang, J. Adjacency-Faithfulness and Conservative Causal Inference. In Proceedings of the 22nd Conference on Uncertainty in Artificial Intelligence,
401-408, 2006.
Richardson, T. and Spirtes, P. Ancestral Graph Markov Models. The Annals of Statistics,
30:962-1030, 2002.
Sadeghi, K. and Lauritzen, S. L. Markov Properties for Mixed Graphs. Bernoulli, 20:676-696,
2014.
Sonntag, D. and Peña, J. M. Learning Multivariate Regression Chain Graphs under Faithfulness. In Proceedings of the 6th European Workshop on Probabilistic Graphical Models,
299-306, 2012.
Sonntag, D. and Peña, J. M. Chain Graph Interpretations and their Relations Revisited.
International Journal of Approximate Reasoning, 58:3956, 2015.
Sonntag, D., Peña, J. M. and Gómez-Olmedo, M. Approximate Counting of Graphical Models
Via MCMC Revisited. International Journal of Intelligent Systems, 30:384420, 2015.
Spirtes, P., Glymour, C. and Scheines, R. Causation, Prediction, and Search. Springer-Verlag,
1993.
Studený, M. A Recovery Algorithm for Chain Graphs. International Journal of Approximate
Reasoning, 17:265-293, 1997.
Studený, M. Probabilistic Conditional Independence Structures. Springer, 2005.