Tractable Subclasses of the Point-Interval Algebra: A Complete Classi cation
advertisement

Tractable Subclasses of the Point-Interval Algebra:
A Complete Classication
Peter Jonsson, Thomas Drakengren and Christer Backstrom
Department of Computer and Information Science
Linkoping University, S-581 83 Linkoping, Sweden
email: fpetej,thodr,cbag@ida.liu.se
Abstract
Several algebras have been proposed for
reasoning about qualitative constraints over
time. One of these algebras is Vilain's pointinterval algebra, which can relate time points
with time intervals. Apart from being a
stand-alone qualitative algebra, it is also used
as a subalgebra in Meiri's approach to temporal reasoning, which combines reasoning
about quantitative and qualitative temporal
constraints over both time points and time
intervals. While the satsiability problem
for the full point-interval algebra is known to
be NP-complete, not much has been known
about its 4294967296 subclasses. We provide
in this paper a complete classication of satisability for all these subclasses into polynomial and NP-complete respectively. We also
identify all maximal tractable subalgebras|
nine in total.
1 INTRODUCTION
Reasoning about temporal constraints is an important
task in many areas of AI and elsewehere, such as planning (Allen, 1991), natural language processing (Song
and Cohen, 1988), time serialization in archeology
(Golumbic and Shamir, 1993) etc. In most applications, knowledge of temporal constraints is expressed
in terms of collections of relations between time intervals or time points. Often we are only interested in
qualitiative relations, i.e. the relative ordering of time
points but not their exact occurrences in time. There
are two archetypical examples of qualitative temporal
reasoning: Allen's algebra (A) (Allen, 1983) for reasoning about time intervals and the point algebra (PA)
(Vilain, 1982) for reasoning about time points.
Attempts have been made to integrate reasoning about
time intervals and time points. Meiri's (1991) approach to temporal reasoning makes it possible to reason about time points and time intervals with respect
to both qualitative and quantitative time. This framework can be restricted to qualitiative time and the
resulting fragment is known as the qualitative algebra
(QA). In QA, a qualitative constraint between two objects O and O (each may be a point or an interval),
is a disjunction of the form (O r1 O ) _ : : : _ (O r O )
where each one of the r 's is a basic relation that may
exist between two objects. There are three types of
basic relations:
i
j
i
j
i
k
j
i
1. Interval-interval relations that can hold between
pairs of intervals. These relations correspond to
Allen's algebra.
2. Point-point relations that can hold between pairs
of points. These relations correspond to the point
algebra.
3. Point-interval and interval-point relations that
can hold between a point and an interval and
vice-versa. These relations were introduced by Vilain (1982). The point-interval and interval-point
relations are symmetric so we will only consider
the point-interval relations in the sequel.
The satisability problem for the point algebra is
known to be tractable (Vilain et al., 1989) and the satisability problem for Allen's algebra is NP-complete
(Vilain et al., 1989). However, a large number of
tractable subclasses of Allen's algebra has been reported in the literature (van Beek and Cohen, 1990;
Golumbic and Shamir, 1993; Nebel and Burckert,
1995; Drakengren and Jonsson, 1996a). Clearly, QA
suers from computational diculties since it subsumes the Allen algebra. Even worse, Meiri (1991)
shows that the satisability problem is NP-complete
even for point-interval relations. Besides this negative result, not very much is known about the computational properties of subclasses of the point-interval
algebra. This is an unfortunate situation if we want
to nd tractable subclasses of the qualitative algebra
since the point-interval and interval-point algebras are
the glue that ties the world of time points together
with the world of time intervals.
We also have reasons to believe that the point-interval
algebra itself can be interesting in applications such
as reasoning about action and change. In certain approaches to action and change, such as the Features
and Fluents framework by Sandewall (1994), a clear
distinction is made between observations and actions.
Typically, observations occur at a single time point
while actions occur over extended periods of time.
Determining temporal relations between observations
and actions in a given scenario seems to be a problem which can be addressed by reasoning in the pointinterval algebra.
The main result of this paper is a complete classication of all subclasses of the point-interval algebra with
respect to tractability. The classication makes it possible to determine whether a given subclass is tractable
or not by a simple test that can be easily carried out
by hand or automatically. We have thus gained a clear
picture of the borderline between tractability and intractability in the point-interval algebra. In this process, we have also taken a small step towards a deeper
understanding of the qualitative algebra.
A few words on methodology seem appropriate at this
point. The proof of the main theorem relies on a quite
extensive case analysis performed by a computer. The
number of cases considered in this analysis was approximately 106. Naturally, such an analysis cannot
be reproduced in a research paper or be veried manually. To allow for the verication of our results, we
include a description of the program used in the analysis. Furthermore, the programs used can be obtained
from the authors.
The rest of this paper is organized as follows: Section 2
denes the point-interval algebra and some auxiliary
concepts. Section 3 contains the classication of subclasses. Section 4 is a brief discussion of the results
and Section 5 concludes the paper. Most of the proofs
are postponed to the appendix. Due to space limitations, we have not been able to give all proofs in their
entirety. The full proofs can be found in the technical
report (Jonsson et al., 1996).
2 POINT-INTERVAL RELATIONS
The point-interval approach to reasoning about time
is based on the notions time points, time intervals and
binary relations on them. A time point p is a variable
interpreted over the set of real numbers R. A time
interval I is represented by a pair hI ; I + i satisfying
I < I + where I and I + are interpreted over R.
We assume that we have a xed universe of variable
names for time points and time intervals. Then, an
V -interpretation is a function that maps time point
variables to R and time interval variables to R R
and satises the previously stated restrictions. We will
frequently extend the notation by denoting the the rst
component of =(I ) by =(I ) and the second by =(I + ).
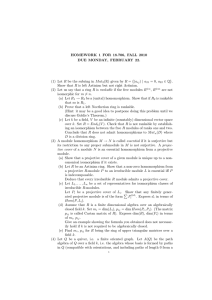
Given an interpreted time point and an interpreted
time interval, their relative positions can be described
by exactly one of the elements of the set B of ve basic
point-interval relations where each basic relation can
be dened in terms of its endpoint relations (see Table
1). A formula of the form pBI where p is a time point,
I a time interval and B 2 B, is said to be satised by
an V -interpretation i the interpretation of the points
and intervals satises the endpoint relations specied
in Table 1.
To express indenite information, unions of the basic
relations are used, written as sets of basic relations,
leading to 25 binary point-interval relations. Naturally, a set of basic relations is to be interpreted as a
disjunction of the basic relations. The set of all pointinterval relations 2B is denoted by V . Relations of
special interest are the null relation ? (also denoted
by ?) and the universal relation B (also denoted >).
With the notation :x we mean the relation B fxg,
e.g. :a = fb; s; d; fg.
A formula of the form pfB1 ; : : : ; B gI is called a pointinterval formula. Such a formula is satised by an
V -interpretation = i pB I is satised by = for some
i, 1 i n. A nite set of point-interval formulae is said to be V -satisable i there exists an
V -interpretation = that satises every formula of .
Such a satisfying V -interpretation is called an V -model
of . The reasoning problem we will study is the following:
Instance: A nite set of point-interval formulae.
Question: Does there exist an V -model of ?
We denote this problem V -SAT. In the following, we
often consider restricted versions of V -SAT where the
relations used in formulae in are only from a subset
S of V . In this case we say that is a set of formulae
over S and we use a parameter in the problem description to denote the subclass under consideration,
e.g. V -SAT(S ).
Meiri's extended denition of the point-interval algebra consists of V equipped with two binary operations
intersection and composition. However, this denition does not constitute an algebra because it is not
closed under composition. We replace the composition operation with an operation on V we call crosscomposition. The reason for introducing the algebra
is that it is needed for the introduction of a closure
operation which will simplify the forthcoming proofs.
n
i
Denition 2.1 Let B = fb; s; d; f; ag. The pointinterval algebra consists of the set V = 2B and the
operations binary intersection (denoted by \) and
ternary cross-composition (denoted by ). Intersec-
tion is dened as 8p; I : p(R \ S )I , pRI ^ pSI while
cross-composition is dened as 8p; I : p(R S T )I ,
9q; J : (qRJ ^ qSI ^ pT J ).
Table 1: The ve basic relations of the V -algebra. The
endpoint relation I < I + that is valid for all relations
has been omitted.
Basic relation Symbol Example Endpoint rel.
p before I
b
p
p < I
p
starts I
s
p
during I
d
p
nishes I
f
p
after I
a
III
p
III
p
III
p
III
III
p
I
< p < I
p
p
=I
+
= I+
p > I
+
S
It can easily be veried that R S T = fB B 0 00
00
000
B jB 2 R; B 2 S; B 2 T g, i.e. cross-composition
is the union of the component-wise cross-composition
of basic relations.
Next, we introduce a closure operation CV together
with a duality operator DV . Both CV and DV transform a given subclass of V to one that is polynomially
equivalent to the original subclass wrt. satisability.
The closure operation is similar to the closure operation for the Allen algebra introduced in (Nebel and
Burckert, 1995), and is dened as follows.
Denition 2.2 Let S V . Then we denote by
CV (S ) the V -closure of S , dened as the least subalgebra containing S closed under intersection and crosscomposition.
A program for computing V -closures can be obtained
from the authors.
Lemma 2.3 Let S V . Then V -SAT(CV (S )) can be
polynomially transformed to V -SAT(S).
Corollary 2.4 Let S V . V -SAT(S ) is polynomial
i V -SAT(CV (S )) is polynomial. V -SAT(S ) is NPcomplete i V -SAT(CV (S )) is NP-complete.
Next we introduce the duality operator and show that
it has the same transformational properties as the closure operation.
Denition 2.5 Let R 2 V . Dene DV (R) as the set
f (r) j r 2 Rg where (r) is dened as follows: (b) =
a, (s) = f, (d) = d, (f) = s and (a) = b.
Let S V . Dene DV (S ) as the set fDV (R) j R 2 Sg.
Lemma 2.6 Let S V . Then V -SAT(DV (S )) can be
polynomially transformed to V -SAT(S).
Proof sketch: Let be an instance of the
V -SAT(DV (S )) problem that have a V -model =.
Construct the following V -SAT(S) instance: 0 =
fpDV (R)I j pRI 2 g. A V -interpretation
=0 of 0 can
0
be constructed as follows: Let = (p) = =(p) for each
time
point p appearing in and let =0 (I ) = =(I + ),
0
+
= (I ) = =(I ) for each time interval I appearing
in . Clearly, =0 is a V -model of 0 . Showing the
converse direction is analogous.
2
Corollary 2.7 Let S V . V -SAT(S ) is polynomial
i V -SAT(DV (S )) is polynomial. V -SAT(S ) is NPcomplete i V -SAT(DV (S )) is NP-complete.
3 CLASSIFICATION OF V
We begin this section by dening nine tractable subalgebras of the point-interval algebra. Later on, we show
that these algebras are the only maximal tractable subalgebras of V . Before we can dene the algebras we
need a denition concerning the point algebra.
Denition 3.1 A PA formula is an expression of the
form xry where r is a member of f<; ; =; 6=; ; >
; ?; >g and x; y denote real-valued variables. The symbol ? denotes the relation ? which is unsatisable for
every choice of x; y 2 R. Similarly, > denotes the relation R R which is satisable for every choice of
x; y 2 R.
Let be a set of PA formulae and X the set of variables appearing in . An assignment of real values to
the variables in X is said to be an PA-interpretation of
. Furthermore, is satisable i there exists an PAinterpretation = such that for each formula xry 2 ,
=(x)r=(y) holds. Such an PA-interpretation = is said
to be an PA-model of .
The rst algebra we will consider has a very close connection to PA. It is dened as follows.
Denition 3.2 The set V 23 consists of those relations
in V that can be expressed as one or more PA formulae
over time points and endpoints of intervals.
The other eight subalgebras are dened in terms of the
CV and DV operators.
Denition 3.3
vs20 = ffsg; fb; sg; fb; ag; :d; :fg, Vs20 = CV (vs20 )
Vf20 = DV (Vs20 )
vd20 = ffb; ag; :b; :s; :f; :ag, Vd20 = CV (vd20 )
v:18a = ffdg; fb; s; ag; :s; :f; :ag, V:18a = CV (v:18a )
V:18b = DV (V:18a )
v:18d = ffdg; fb; dg; :s; :d; :fg, V:18d = CV (v:18d )
Vs17 = f?g [ fr 2 V j fsg rg
Vf17 = DV (Vs18 )
Given a subalgebra V , x is the number of relations
in the algebra and y is an element that is unique for
V among the subalgebras of size x. For instance, Vs17
is the only subalgebra of size 17 that contains fsg.
Let V be the set of all subalgebras in Denition 3.3
plus the algebra V 23 . The relations included in each
of these algebras can be found in Table 2. Further, let
V denote the set of subalgebras listed in Table 3.
x
y
x
y
P
NP
We have the following theorem.
Theorem 3.4 If V 2 V then V -SAT(V ) is polynomial. If V 2 V then V -SAT(V ) is NP-complete.
Proof: See Appendices A and B for the results concerning V and V , respectively.
2
The main theorem can now be stated.
Theorem 3.5 For S V , V -SAT(S ) is polynomial i
S is a subset of some member of V .
Proof: if: For each V 2 V , V -SAT(V ) is polynomial
by Theorem 3.4.
only-if: Assume there exists a subclass S V such
that V -SAT(S ) is polynomial and S is not a subset
of any algebra in V . Without loss of generality, let
S be such a class with the least number of elements.
For each subalgebra V in V , choose a relation x such
that x 2 S and x 62 V . This can always be done since
S 6 V . Let X be the set of these relations. The
following holds for X :
1. V -SAT(X ) is polynomial since X S .
2. X is not a subset of any algebra in V .
S is a minimal set satisfying (1) and (2) above. Hence,
jSj jX j. Furthermore, X S so jSj jX j and
jSj = jX j. The set V contains nine algebras so by
the construction of X , jX j 9. As a consequence,
jSj 9.
To show that S does not exist, a machine-assisted case
analysis of the following form was performed:
1. Generate
all subsets of V of size 9. There are
9 X
32 4:3 106 such subsets.
i
P
NP
P
NP
P
P
P
P
P
P
i
=0
2. Let T be such a set. Test: T is a subset of some
subalgebra in V or D CV (T ) for some D 2
V .
The test succeeds for all T . Hence, by Theorem 3.4,
either V -SAT(S ) is NP-complete or S is a subset of
some member of V . Both cases contradict our initial
assumptions so S cannot exist.
2
P
NP
P
4 DISCUSSION
We have only considered qualitative relations between
time points and intervals in this paper. For certain applications this is satisfactory|for others we
must have the ability to reason also about quantitative time. Previous research on reasoning about combined qualitative and quantitative time has proven
this problem to be computationally hard. However,
recent results show that tractable reasoning is possible in certain subclasses of Allen's algebra augmented with quite advanced quantitative information.
The linear-programming approach by Jonsson and
Backstrom (1996) oers a straightforward method for
extending the ORD-Horn subclass with quantitative
information. Several other subclasses of Allen's algebra with this property are exhibited in (Drakengren
and Jonsson, 1996b). Almost certainly, these methods can be adapted to the point-interval algebra. This
opens up for some interesting future research. Another
interesting research direction is the study of tractable
subclasses of Meiri's unrestricted approach, i.e., allowing for time points and time intervals to be both
qualitatively and quantitatively related.
The number of subclasses of V 8192
(232 4:32466
109 ) is very
small in comparison with the 2 10 subclasses
of A. In principle it would have been possible to enumerate all subclasses of V with the aid of a computer.
Obviously, this is not the case with A (at least not
with the computers available today). If we want to
classify the subclasses of A with respect to tractability, we must use other methods. We are not pessimistic
about the possibility of creating a complexity map of
A. Similar projects have been successfully performed
in mathematics and computer science. A well-known
example is the proof of the four-colour theorem (Appel
and Haken, 1976) which combine theoretical studies of
planar graphs with extensive machine-generated case
analyses. It seems likely that we shall need methods
that combine theoretical studies of the structure of A
with brute-force computer methods. Here we can see
a challenge for both theoreticians and practitioners in
computer science.
5 CONCLUSIONS
We have studied computational properties of the
point-interval algebra. All of the 232 possible subclasses are classied with respect to whether their corresponding satisability problem is tractable or not.
The classication reveals that there are exactly nine
maximally tractable subclasses of the algebra.
References
AAAI (1996). Proc. 13th (US) Nat'l Conf. on Artif.
Intell. (AAAI-96), Portland, OR, USA.
Table 2: The maximal tractable subalgebras of V .
?
fbg
fsg
fb; sg
fdg
fb; dg
fs; dg
fb; s; dg
ffg
fb; fg
fs; fg
fb; s; fg
fd; fg
fb; d; fg
fs; d; fg
fb; s; d; fg
fag
fb; ag
fs; ag
fb; s; ag
fd; ag
fb; d; ag
fs; d; ag
fb; s; d; ag
ff; ag
fb; f; ag
fs; f; ag
fb; s; f; ag
fd; f; ag
fb; d; f; ag
fs; d; f; ag
>
V 23
Vs20
Vf20
Vd20
Allen, J. F. (1983). Maintaining knowledge about
temporal intervals. Comm. ACM, 26(11):832{843.
Allen, J. F. (1991). Temporal reasoning and planning.
In Allen, J., Kautz, H., Pelavin, R., and Tenenberg,
J., editors, Reasoning about Plans, chapter 1, pages
1{67. Morgan Kaufmann.
Appel, K. and Haken, W. (1976). Every planar map
is four colorable. Bulletin of the American Mathematical Society, 82:711{712.
Drakengren, T. and Jonsson, P. (1996a). Maximal
tractable subclasses of Allen's interval algebra: Preliminary report. In (AAAI, 1996).
Drakengren, T. and Jonsson, P. (1996b). Eight maximal tractable subclasses of Allen's algebra with metric time. Manuscript.
Golumbic, M. C. and Shamir, R. (1993). Complexity
and algorithms for reasoning about time: A graphtheoretic approach. J. ACM, 40(5):1108{1133.
Jonsson, P. and Backstrom, C. (1996). A linearprogramming approach to temporal reasoning. In
(AAAI, 1996).
V:18a
V:18b
V:18d
Vf17
Vs17
Jonsson, P., Drakengren, T., and Backstrom, C.
(1996). Tractable subclasses of the point-interval algebra: A complete classication. Technical report. In
preparation.
Meiri, I. (1991). Combining qualitative and quantitative constraints in temporal reasoning. In Proc. 9th
(US) Nat'l Conf. on Artif. Intell. (AAAI-91), pages
260{267, Anaheim, CA, USA.
Nebel, B. and Burckert, H.-J. (1993). Software
for machine assisted analysis of Allen's interval algebra. Available from the authors by anonymous
ftp from duck.dfki.uni-sb.de as /pub/papers/DFKIothers/RR-93-11.programs.tar.Z.
Nebel, B. and Burckert, H.-J. (1995). Reasoning
about temporal relations: A maximal tractable subclass of Allen's interval algebra. J. ACM, 42(1):43{66.
Sandewall, E. (1994). Features and Fluents. Oxford
University Press.
Song, F. and Cohen, R. (1988). The interpretation
of temporal relations in narrative. In Proc. 7th (US)
Nat'l Conf. on Artif. Intell. (AAAI-88), pages 745{
750, St. Paul, MN, USA.
van Beek, P. and Cohen, R. (1990). Exact and approximate reasoning about temporal relations. Comput. Intell., 6(3):132{144.
Vilain, M. B. (1982). A system for reasoning about
time. In Proc. 2nd (US) Nat'l Conf. on Artif. Intell.
(AAAI-82), pages 197{201, Pittsburgh, PA, USA.
Vilain, M. B., Kautz, H. A., and van Beek, P. G.
(1989). Constraint propagation algorithms for temporal reasoning: A revised report. In Readings in
Qualitative Reasoning about Physical Systems, pages
373{381. San Mateo, CA.
Appendix
This appendix collects the tractability and intractability proofs needed for the proof of Theorem 3.5. The
former results can be found in part A and the latter
results in part B. Due to space limitations, we have not
been able to give all proofs in their entirety. Hence,
certain proofs are only sketched or outlined. The full
proofs can be found in the technical report (Jonsson
et al., 1996).
A TRACTABILITY RESULTS
To make the forthcoming proofs less cumbersome, we
need a few results of more general character. These
can be found in Section A.1. The actual proofs of
tractability can be found in Section A.2.
A.1 MODEL TRANSFORMATIONS
One of our main vehicles for showing computational
properties of dierent subclasses is that of model transformations. It is a method for transforming a solution
of one problem to a solution of a related problem.
Denition A.1 Let
T be a mapping on V interpretations. We say that T is a model transformation.
This denition is very general. To make it applicable
in practice, we need a way of describing model transformations in greater detail.
Denition A.2 Let T be a model transformation. A
function f : B ! 2B is a description of T i for arbitrary V -interpretations =, the following holds: if b 2 B
and p(b)J under = then p(f (b))J under T (=). A description f can be extended
S to handle disjunctions in
the obvious way: f (R) = 2 f (r).
T
T
T
T
r
R
T
We can now provide two lemmata showing how model
transformations can be used.
Lemma A.3 Let R = fr1; : : : ; r0 g V0 be such
that
V -SAT(R) is polynomial. Let R = fr1; : : : ; r0 g V .
Let T be a model transformation and f a description
of T . If the following holds: (1) r r0 for 1 k n;
and (2) f (r0 ) r for 1 k n, then V -SAT(R0 ) is
n
n
T
k
T
k
k
polynomial.
Proof: Let 0 be a instance of V -SAT(R0 ). Let =
fpr J j pr0 J 2 0 g. Obviously, this is a polynomial
transformation and is an instance of V -SAT(R). We
show that has a model i 0 has a model. Since it
can be decided in polynomial time whether has a
model or not, the lemma follows.
only-if: Let = be a model of . Recall that r r0 ,
1 k n. Hence, = is a model for 0 since every
relation pr0I 2 0 is weaker than the corresponding
relation prI 2 .
if: Let =0 be a model of 0 . We show that T (=0) is a
model of . Arbitrarily choose a formula pr I in .
Clearly, there0 exists a 0formula pr0 I 2 0 . 0Thus, we
have that pr I under = which implies pf (r )I under
T (=0 ) since f is a description of T . Furthermore,
f (r0 ) r so pr I under T (=). Hence, T (=) is a
model of .
2
Lemma A.4 Let R = fr1; : : : ; r g V and R0 =
fr10 ; : : : ; r0 g V be such that V -SAT(R) is NPcomplete. If there exists a model transformation T
with a description f such that f (r0 ) r for every
1 k n then V -SAT(R0 ) is NP-complete.
Proof: Let be an arbitrary instance of V -SAT(R).
Let 0 = fpf (r)J j prJ 2 g. Obviously, this is
a polynomial
transformation and 0 is an instance0 of
0
V -SAT(R ). We show that is satisable i is
satisable.
if: Let =0 be a model of 0 . Recall that f (r0 ) r ,
1 k n. Hence, =0 is a model for since every
relation prI 2 is0 weaker than the corresponding
relation pf (r)I 2 .
only-if: Let = be a model of . We show that T (=)
is 0a model of 0 . Arbitrarily 0choose a formula prI in
. By the construction of , there exists a formula
psI 2 such that r = f (s). Thus, we have that psI
under = which implies pf (s)I under T (=) since f is
a description of T . Hence, IrJ under T (=).
2
Before we dene a number of model transformations
that we will use later on, we need an auxiliary denition.
Denition A.5 Let S R be nite and denote the
absolute value of x with abs(x) The minimal distance
in S , MD(S ), is dened as minfabs(x y) j x; y 2 S
and x 6= yg.
Observe that jS j 2 in order to make MD(S ) dened. For all such S , MD(S ) > 0. The denition of
k
k
k
k
k
k
k
T
k
k
T
T
k
k
k
n
n
T
T
k
k
T
T
k
k
T
T
T
T
minimal distance can be extended to V -interpretations
in the following way: Let = be an V -interpretation
that assigns values to a set of time points P and a
set of intervals I . Let MD(=) = MD(f=(p) j p 2
Pg [ f=(I ); =(I + ) j I 2 Ig).
In the forthcoming four propositions, let = be an arbitrary V -interpretation and let " = MD(=).
Proposition A.6 Dene T1(=) as follows: (1) for
each time point p let T1 (=)(p) = =(p); (2) for
each time interval I let T1(=)(I ) = =(I ) + " and
T1 (=)(I + ) = =(I + ). The description of T1, f 1 is
then: f 1 (b) = fbg, f 1 (s) = fbg, f 1 (d) = fdg,
f 1 (f) = ffg and f 1 (a) = fag.
T
T
T
T
T
T
Proposition A.7 Dene T2(=) as follows: (1) for
each time point p let T2 (=)(p) = =(p); (2) for
each time interval I let T2(=)(I ) = =(I ) + " and
T2 (=)(I + ) = =(I + ) ". The description of T2 , f 2
is then: f 2 (b) = fbg, f 2 (s) = fbg, f 2 (d) = fdg,
f 2 (f) = fag and f 2 (a) = fag.
T
T
T
T
T
T
Proposition A.8 Dene T3(=) as follows: (1) for
each time point p let T3 (=)(p) = =(p); (2) for
each time interval I let T3(=)(I ) = =(I ) " and
T3 (=)(I + ) = =(I + ). The description of T3, f 3 is
then: f 3 (b) = fbg, f 3 (s) = fdg, f 3 (d) = fdg,
f 3 (f) = ffg and f 3 (a) = fag.
T
T
T
T
T
T
Proposition A.9 Dene T4(=) as follows: (1) for
each time point p let T4 (=)(p) = =(p); (2) for
each time interval I let T4(=)(I ) = =(I ) and
T4 (=)(I + ) = =(I + ) " The description of T4 , f 4
is then: f 4 (b) = fbg, f 4 (s) = fsg, f 4 (d) = fdg,
f 4 (f) = fag and f 4 (a) = fag.
T
T
T
T
T
T
A.2 PROOFS OF TRACTABILITY
Proving tractability of V -SAT(V 23 ) is straightforward.
Proposition A.10 Deciding satisability of a set of
PA formulae is polynomial.
Proof: See (Vilain et al., 1989).
2
Lemma A.11 V -SAT(V 23 ) is polynomial.
Proof:
Follows immediately from the denition of
V 23 and the previous proposition.
2
Lemma A.12 V -SAT(Vs20 ) is polynomial.
Proof: By 20Corollary 2.4, it is sucient to show
that V -SAT(vs ) is polynomial. Let be an arbitrary instance of V -SAT(vs20 ). Dene the function
: vs20 ! f; =; =
6 ; >g as follows: (fsg) = \=",
(fb; sg) = \", (fb; ag) = \=
6 ", (fb; s; d; ag) =
\>" and (fb; s; f; ag) = \>".
Let 0 = fx (R)y j pRI 2 g. In the sequel, y
will be considered as the starting point of the interval
I . By Proposition A.10, it is polynomial to decide Rsatisability of 0 . We show that is V -satisable i
0 is R-satisable.
if: Let =0 be an R-model of 0 . Let " = MD(=0 )=2.
We construct an V -interpretation = of as follows:
For each variable x in 0 let =(p) = =0 (x ).
For +each variable
y in 0 let =(I ) = =0(y ) and
=(I ) = =0(y ) + "
We show that = is an V -model of . Let pRI be an
arbitrary formula in . We have ve dierent cases.
1. R = fsg. Then =0 (x )(fsg)=0(y ) , =0(x ) =
=0 (y ) , =(p) = =(I ). Consequently, pfsgI
under =.
2. R = fb; sg. Then =0(x )(fb; sg)=0(y ) ,
=0 (x ) =0(y ) , =(p) =(I ). Consequently,
pfb; sgI under =.
3. R0 = fb; ag0 . Then =0(x )(fb; ag)=0(y ) ,
= (x ) 6= = (y ) , =(p) 6= =(I ). If =(p) <
=(I ) then pfbgI under =. If =(p) > =(I ) then
=(p) > =(I + ) since I + = I + ". In this case
pfagI under = . Consequently, pfb; agI under =.
4. R = fb; s; f; ag. Assume
pfdgI under =. Then
=(I ) < =(p)0 < =(I +0) , =(I0 ) < =(p) <
=(I ) + " , = (y ) < = (x ) < = (y ) + " which
contradicts the choice of ". Hence, pfb; s; f; agI
under =
5. R = fb; s; d; ag. This case is analogous to the
previous case.
only-if: Let = be an V -model of . We construct an
R-interpretation =0 of 0 as follows:
For each time point p in let =0 (x ) = =(p).
For each time interval I in let =0 (y ) = =(I ).
Next, we show that =0 is an R-model of 0 . Let x Ry
be an arbitrary formula in 0 . We have four dierent
cases:
1. R = \=". Assume =0 (x ) 6= =0(y ). Then =(p) 6=
=(0 I ) and pfb; d; f; agI under =. But x = y 2
i pfsgI 2 which leads to a contradiction.
Hence, x = y under =0 .
2. R = \6=". This case is analogous to the previous
case.
3. R = \". Assume =0 (x ) > =0(y ). Then =(p) >
=(I ) and pfd; f; agI under =. But x y 2 0
i pfb; sgI 2 which 0leads to a contradiction.
Hence, x y under = .
4. R = \>". This
relation holds trivially in every
R-model of 0 .
2
p
I
I
p
p
I
I
I
p
I
p
I
p
p
I
p
I
I
p
I
I
p
I
p
I
p
p
I
p
p
I
p
p
I
I
p
I
I
I
Lemma A.13 V -SAT(Vd20 ) is polynomial.
Proof sketch: By Corollary 2.4, it is sucient to
show that V -SAT(vd20 ) is polynomial. Let be an
arbitrary instance of V -SAT(vd20 ). Dene the function : vd20 ! f; ; 6=; >g as follows: (fb; ag) =
\6=", (fs; d; f; ag) = \", (fb; s; d; fg) = \",
(fb; s; d; ag) = \>", and (fb; d; f; ag) = \>".
Let 0 = fx (R)y j pRI 2 g. By Proposition 0A.10,
it is polynomial to decide R-satisability of . To
show that is V -satisable i 0 is R-satisable is
analogous to the proof of Lemma A.12.
2
p
I
Lemma A.14 V -SAT(V:18a ) is polynomial.
Proof: By 18Corollary 2.4, it is sucient
to show
that V -SAT(v:a ) is polynomial. Let r10 = fdg, r20 =
fb; s; ag, r30 S=5 :f, r40 = :a and r50 = :s. Note
that v:18a = =1 fr0 g. Furthermore, let r = r0 for
i 2 f1; 3; 4; 5g and let r2 = fb; ag. It can easily be
veried that r r0 for 1 k 5. Furthermore,
f 1 (r0 ) r for 1 k 5. Hence, by Lemma A.3,
the polynomiality of V -SAT(V:18a ) follows.
2
i
k
T
i
i
i
k
k
k
Lemma A.15 V -SAT(V:18d ) is polynomial.
Proof: 18By Corollary 2.4, it is sucient
to show that
V -SAT(v:d ) is polynomial. Let r10 = fdg, r20 = fb; dg,
r30 = :s, r40 = :d and r50 = :f. Note that v:18d =
S
5 fr0 g. Furthermore, let r = r0 for i 2 f1; 3; 4; 5g
=1
and let r4 = fb; ag. It can easily be veried that
r r0 for 1 k 5. Furthermore, f 2 (r0 ) r
for 1 k 5. Consequently, by Lemma A.3, the
2
polynomiality of V -SAT(V:18d ) follows.
i
k
i
k
i
i
T
k
k
Lemma A.16 V -SAT(Vs17 ) is polynomial.
Proof:17 Let be an arbitrary instance of V SAT(Vs ). If a formula of the form p?I is in then
is not satisable. Otherwise, consider the following
V -interpretation: =(p) = 0 for every time point p and
=(I ) = 0 and =(I + ) = 1 for every interval I . Let
pRI be an arbitrary formula in . By the denition
of Vs17 , s 2 R. Obviously, = satises pRI . Since it
is polynomial to check whether pRI 2 or not, the
lemma follows.
2
B INTRACTABILITY RESULTS
This section provides proofs for the NP-complete subclasses of V presented in Table 3. The reductions are
mostly made from dierent subalgebras of Allen's interval algebra. Consequently, we begin this section by
recapitulating some results concerning Allen's algebra.
Table 3: NP-complete subclasses of V .
Subclass Relations
1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
D16
D17
D18
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D
fdg; fsg; fb; ag
fdg; ffg; fb; ag
fdg; fsg; fb; f; ag
fdg; ffg; fb; s; ag
fdg; fsg; fs; ag
fdg; ffg; fb; fg
fdg; fs; fg
fsg; fb; fg
ffg; fs; ag
fsg; fb; f; ag; fb; s; d; fg
ffg; fb; s; ag; fs; d; f; ag
fdg; fb; fg
fdg; fs; ag
fd; ag; fb; fg
fb; dg; fs; ag
fdg; fs; f; ag
fdg; fb; s; fg
fs; fg; fb; dg
fs; fg; fd; ag
fs; fg; fb; ag
fd; ag; fb; s; fg
fb; dg; fs; f; ag
fs; dg; fb; fg
fd; fg; fs; ag
fs; d; ag; fb; fg
fb; d; fg; fs; ag
fb; fg; fs; ag
fs; fg; fb; d; ag
Proof
Lemma B.7
D2 = DV (D1 )
Lemma B.8
D4 = DV (D3 )
Lemma B.9
D6 = DV (D5 )
Lemma B.10
Lemma B.11
D9 = DV (D8 )
D8 CV (D10 )
D11 = DV (D10 )
Lemma B.12
D13 = DV (D12 )
Lemma B.13
D15 = DV (D14 )
Lemma B.14
D17 = DV (D16 )
Lemma B.15
D19 = DV (D18 )
Lemma B.16
Lemma B.17
D22 = DV (D21 )
Lemma B.18
D24 = DV (D23 )
Lemma B.19
D26 = DV (D25 )
Lemma B.20
Lemma B.21
B.1 ALLEN'S ALGEBRA
Allen's interval algebra (Allen, 1983) is based on the
notion of relations between pairs of intervals. An interval X is represented as an ordered pair hX ; X + i
of real numbers with X < X + , denoting the left
and right endpoints of the interval, respectively, and
relations between intervals are composed as disjunctions of basic interval relations. Their exact denitions
can be found in (Allen, 1983). Such disjunctions are
represented as sets of basic relations. The algebra is
provided with the operations of converse, intersection
and composition on intervals. The exact denitions of
these operations can be found in (Allen, 1983). By
the
fact that there are thirteen basic relations, we get
213 = 8192 possible relations between intervals in the
full algebra. We denote the set of all interval relations
by A. The reasoning problem we will consider is the
problem of satisability (A-SAT) of a set of interval
variables with relations between them, i.e. deciding
whether there exists an assignment of intervals on the
real line for the interval variables, such that all of the
relations between the intervals hold. Such an assignment is said to be a A-model for the interval variables
and relations. For A, we have the following result.
Theorem B.1 Let N2 be the set ff; d ; o; m; f g;
f; d; o; m; sg; fd ; o; o ; s ; f gg and let 0 be
^
^
^
^
^
^
the set ff; g; f; d; d ; o; o ; m; m ; s; s ; f; f gg.
A SAT(S ) is NP-complete if N2 S (Nebel and
Burckert, 1995), or 0 S (Golumbic and Shamir,
1993).
^
^
^
^
^
To facilitate the forthcoming proofs we will use a closure operation for Allen's algebra which was dened
in (Nebel and Burckert, 1995).
Denition B.2 Let S A. Then we denote by
CA (S ) the A-closure of S under converse, intersection
and composition, i.e. the least subalgebra containing
S closed under the three operations.
The key result for CA is the following. The proof appears in (Nebel and Burckert, 1995).
Proposition B.3 Let S A. Then A-SAT(S ) is
polynomial i A-SAT(CA (S )) is and A-SAT(S ) is NPcomplete i A-SAT(CA(S )) is.
Next, we will dene a number of subclasses of A and
prove that A-SAT for them is NP-complete. These
subclasses will be used later on in the NP-completeness
proofs for the subclasses in Table 3.
Denition B.4 Let s0 ; s1; : : : ; s7 be dened as follows: s0 = fd; o ; fg, s1 = f; ; d ; o; m; f g,
s2 = f; ; s; s g, s3 = f; m; m ; s; s ; f; f g,
s4 = fd; o; o ; s; fg, s5 = f; d ; o; m; m g, s6 =
f; s; s g and s7 = f; ; d ; o; o ; m; m ; s ; f g.
Denote by S the set fs ; s g.
Proposition B.5
^
^
^
^
^
^
^
ij
^
^
i
^
^
^
^
^
^
^
j
i J < I < J + ;
Is1 J i I < J _ I > J + ;
Is2 J i I = J _ I > J + ;
Is3 J i (I = J ) _ (I = J + ) _ (I + = J ) _
(I + = J + );
Is4 J i (J < I < J + ) _ (J < I + < J + );
Is5 J i (I < J ) _ (I = J + );
Is6 J i I = J ;
Is7 J i (I < J ) _ (I > J + ) _ (I + < J ) _
(I + > J + ).
Is0 J
Lemma B.6 A-SAT(S ) is NP-complete for S 2
fS01; S02; S34 ; S56; S37g.
Proof:
By Corollary B.3, we can study ASAT(CA(S )) instead of A-SAT(S ). It can be veried
that N2 is a subset of CA (S01), CA(S02 ) and CA (S56).
Likewise, it can be shown that 0 is a subset of
CA (S34) and CA (S37). Hence, NP-completeness follows
from Theorem B.1.
2
In the previous lemma, CA was computed by the utility
aclose (Nebel and Burckert, 1993).
B.2 NP-COMPLETE SUBCLASSES OF V
Lemma B.7 V -SAT(D1 ) is NP-complete.
Proof: Reduction from A-SAT(S01) which is NPcomplete by Lemma B.6. Let be an instance of
A-SAT(S01). We construct a set 0 as follows.
1. For each formula of the type Is0 J in , introduce a new time point p and let p fsgI and
p fdgJ in 0;
2. For each formula of the type Is1 J in , introduce a new time point q and let q fsgI and
q fb; agJ in 0 .
Clearly 0 is an instance of the V -SAT(D1 ) problem.
We show that is satisable i 0 .
only-if: Assume there exists a A-model = of . We
construct
an V -interpretation =0 of 0 as follows:
=0 (I )0 = =(I ), =0(I + ) = =(I + ), =0 (p ) = =(I )
and = (q ) = =(I ).
By the construction
of 0 , three types of formulae can
0
appear in . We consider them one at a time.
1. p fsgI and q fsgI . Such formulae are trivially satised under =0 .
2. p fdgJ . If p fdgJ 2 0 then Is0 J 2 .
Since+ = is a A-model of , =(J + ) < =(I ) <
=(J ) by Proposition B.5. By the construction
of =0, =0 (p ) = =(I ), =0 (J ) = =(J ) and
=0 (J + ) = =(J + ). Hence, p fdgJ under =0 .
3. q fb; agJ . If p fb; agJ 2 0 then Is1 J 2 .
Since = is a A-model of , =(I ) < =(J ) or
=(I ) > =(J + ) 0 by 0 Proposition B.5. 0 By the
construction of = , = (q ) = =(I ), = (J ) =
=(J ) and
=0 (J + ) = =(J + ). Hence, q fb; agJ
0
under = .
As a consequence, =0 is a V -model of 0 .
if: Assume there exists an V -model =0 of 0 . We construct 0an+A-model+= of as follows: =0 (I ) = =(I )
and = (I ) = =(I ).
Arbitrarily choose a formula of the form 0Is0 J in .
Then there exists a time point p in such that
p fsgI and p fdgJ . It follows that =0 (J ) <
=0 (I + ) < =0 (J + ) and, by the construction of =,
=(J ) < =(I + ) < =(J + ). Hence, Is0 J under =.
Arbitrarily choose a formula of the form Is1 J in .
Then there exists a time point q in 0 such
that
q fsgI and q fb; agJ . It follows that =0 (I ) <
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
=0 (J ) or =0 (I ) > =0 (J + ). By the+ construction of
=, =(I ) < =(J ) or =(I ) > =(J ). Hence, Is1 J
under = by Proposition B.5.
Consequently, = is a A-model of . We have thus
shown that is satisable i 0 is satisable. NPcompleteness of V -SAT(D1 ) follows immediately. 2
Lemma B.8 V -SAT(D3 ) is NP-complete.
Proof: Let D3 = ff0 dg; fsg; fb; f; agg =0 fr10 ; r20 ; r30 g.
Observe that
f 4 (r1 ) = fdg, f 4 (r2 ) = fsg
and f 4 (r30 ) = fb; ag. By Lemma B.7, D1 =
ffdg; fsg; fb; agg and V -SAT(D1 ) is NP-complete.
Hence, V -SAT(D3 ) is NP-complete by Lemma A.4.
T
T
T
2
Lemma B.9 V -SAT(D5 ) is NP-complete.
Proof sketch: Reduction from A-SAT(S02) which
is NP-complete by Lemma B.6. Let 0 be an instance
of A-SAT(S02 ). We construct a set as follows.
1. For each formula of the type Is0 J in , introduce a new time point p and let p fsgI and
p fdgJ in 0;
2. For each formula of the type Is2 J in , introduce
a new time point
q and let let q fsgI and
q fs; agJ in 0 .
Clearly 0 is an instance of the V -SAT(D5 ) problem.
Show that is satisable i 0 is similar to the proof
of Lemma B.7.
2
Lemma B.10 V -SAT(D7 ) is NP-complete.
Proof: Reduction from A-SAT(S34) which is NPcomplete by Lemma B.6. Let 0be an instance of
A-SAT(S34). We construct a set as follows.
1. For each formula of the type Is3 J in , introduce a new time point p and let p fs; fgI
and p fs; fgJ in 0 ;
2. For each formula of the type Is3 J in , introduce a new time point q and let q fs; fgI and
q fdgJ in 0 .
Clearly 0 is an instance of the V -SAT(D7 ) problem.
We show that is satisable i 0 .
Assume there exists a0 A-model
= of . We construct
an V -interpretation = of 0 as follows:
1. =0 (I ) = =(I );
2. =0 (I + ) = =(I + );
3. =0 (p+ ) = =(I ) if =(I ) = =(J ) or =(I ) =
=(J );
4. =0 (p ) = =(I++ ) otherwise.
In this case =(I + ) =
+
=(J ) or =(I ) = =(J );
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
5.
6.
=0 (q ) = =(I ) if =(J ) < =(I ) < =(J + );
=0 (q+ ) = =(+I + ) otherwise. In this case =(J ) <
=(I ) < =(J ).
I ;J
I ;J
By the construction of 0 , four types of formulae can
appear in 0 . We consider them one at a time.
If p fs; fgI 2 0 then Is3 J 2 .
By Proposition B.5, (I = J ) or (I = J + )
or (I + = J ) or (I + = J + ).0 If =(I ) =
=(J ) or =(I ) = =(J ) then = (p )0 = =(I )
and, consequently,
p fs; fgI under = . Otherwise, =(I + ) = =(J ) or =(I + ) = =(J ) and
=0 (p ) = =(I + ). Hence p fs; fgI under =0 .
2. p fs; fgJ . This case is analogous to the previous
case.
3. q fs; fgI . If q fs; fgI 2 0 then Is4 J 2 .
By Proposition B.5, (=(J ) < =(I ) < =(J + )) _
(=(J+ ) < =(I0+ ) < =(J + )). If =(J ) < =(I ) <
=(J then = (q ) = =(I ) and q fsgI under =. Otherwise, =(J ) < =(I + ) < =(J + ,
=0 (q ) = =(I + ) and q ffgI under =.
4. q fdgJ . If q fdgJ 2 0 then Is4 J 2 . By
Proposition B.5,
(=(J ) < =(I ) < =(J + )) _
(=(J+ ) < =(I0+ ) < =(J + )). If =(J ) < =(I ) <
=(J then = (q ) = =(I ) and +q fdgI under0 =. Otherwise,
=(J ) < =(I ) < =(J + ,
+
= (q ) = =(I ) and q fdgI under =.
1.
pI ;J fs; fgI .
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
As a consequence, =0 is a V -model of 0 .
Now, assume there exists a V -model =0 of 0 . We construct
an A-interpretation = of as follows: =(I ) =
=0 (I ) and =(I + ) = =0(I + ).
Arbitrarily choose a formula of the form 0Is3 J in .
Then there exists a time point p in such that
p fs; fgI and p fs; fgJ under =0. This implies
that one endpoint in I equals one endpoint in J and,
by Proposition B.5, Is3 J under =.
Arbitrarily choose a formula of the form Is4 J in .
Then there exists a time point q0 in 0 such that
q fs; fgI and q fdgJ under = . Assume q fsgI
under =0. Then =(J ) < =(I ) < =(J + ). Assume to
the contrary +that p f+fgI under =0. It follows that
=(J ) < =(I ) < =(J ). Hence, by Proposition B.5,
Is4 J under =.
2
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
I ;J
Lemma B.11 V -SAT(D8 ) is NP-complete.
Proof sketch: Reduction from A-SAT(S56) which
is NP-complete by Lemma B.6. Let be an instance
of A-SAT(S56 ). We construct a set 0 as follows.
1. For each formula of the type Is5 J in , introduce a new time point p and let p fsgI and
p fb; fgJ in 0 ;
I ;J
I ;J
I ;J
2. For each formula of the type Is6 J in , introduce a new time point q and let q fsgI and
q fsgJ in 0 .
Clearly 0 is an instance of the V -SAT(D8 ) problem.
It is 0a routine verication to show that is satisable
i is satisable.
2
Lemma B.12 V -SAT(D12 ) is NP-complete.
Proof: By Lemma B.9, V -SAT(D5 ) is NP-complete
and V -SAT(D6 ) is NP-complete since D6 = DV (D5 ).
Let E = ffbg; fdg; fb; fgg. It can be veried that
D6 CV (E ) and, hence, V -SAT(E ) is NP-complete.
Let be an arbitrary instance of the V -SAT(E ) problem. We show how to construct an instance 0 of the
V -SAT(D12 ) problem that is satisable i is satisable.
We begin showing how to relate a point p1 and an
interval I1 such as p1fbgI1 by only using the relations in D12. We introduce two fresh time points p2
and p3 together with two fresh time intervals I2 and
I3 . Consider the following construction: p1fb; fgI1,
p1 fb; fgI2, p1fb; fgI3, p2fb; fgI1, p2fdgI2 , p2fb; fgI3,
p3 fb; fgI1, p3 fb; fgI2 and p3fdgI3.
We denote this set of relations with . Let = be a
V -model of . For the sake of brevity we identify the
time points and time intervals with their values when
interpreted by =. Hence, instead of writing =(p1) <
=(I1 ), we simply write p1 < I1 .
Obviously, p1 < I1 or p1 = I1+ . We begin by showing
that there exists a V -model of such that p1 < I1 .
Let = (I1 p1 )=5. Consider the following assignment
of values: I3 = p1 + , p3 = p1 + 2 , I2 = p1 + 3 ,
p2 = p1 + 4 , I3+ = p1 + 4 and I2+ = I1+ . It is not
hard to see that this assignment is a V -model of .
Next, we show that there does not exist any V -model
of such that p1 = I1+ . Assume = is such a V -model.
By relation (4), we can see that p2 < I1 or p2 = I1+ .
By assumption, p1 = I1+ . Hence, either p2 < I1 or
p2 = p1 . If p2 = p1 then relation (2) is equivalent to
p2 fb; fgI2 which clearly contradicts relation (5). Thus,
p2 < I1 and p2fbgI1. By analogous reasoning one can
see that p3 < I1 and p3fbgI1 .
Next, observe that relations (2) and (3) implies p1 I2+ and p1 I3+ . Furthermore, p2 < I1 and p3 < I1
which implies p2 < I1+ and p3 < I1 . By our initial
assumption p1 = I1+ we get p2 < I1+ = p1 I3+ and
p3 < I1+ = p1 I2+ .
Consequently, p2 < I3+ and p3 < I2+ . Observe that
p2 fb; fgI3 and p3fb; fgI2 by relations (6) and (8), respectively. Hence, p2 < I3 and p3 < I2 .
By relations (5) and (9), I2 < p2 < I2+ and I3 <
p3 < I3+ . Hence, p2 < I3 < p3 < I2 < p2 which
I ;J
I ;J
I ;J
is a contradiction. Consequently, every V -model of satises p1 < I1 .
We have thus shown how to express the relation fbg by
only using fdg and fb; fg. Obviously, we can take an
instance of the V -SAT(E ) problem and in polynomial
time transform it into an equivalent instance of the V SAT(D12) problem. NP-completeness of V -SAT(D12 )
follows immediately.
2
Lemma B.13 V -SAT(D14 ) is NP-complete.
Proof sketch: By Lemma B.9, V -SAT(D5 ) is
NP-complete and V -SAT(D6 ) is NP-complete since
D6 = DV (D5 ). Let E = ffbg; fd; ag; fb; fgg. It can
be veried that D6 CV (E ) and, hence, V -SAT(E ) is
NP-complete. Let be an arbitrary instance of the
V -SAT(E ) 0 problem. We show how to construct an
instance of the V -SAT(D14 ) problem that is satis-
able i is satisable.
The proof boils down to showing how to relate a point
p1 and an interval I1 such as p1fbgI1 by only using
the relations in D14. We introduce two fresh time
points p2 and p3 together with two fresh time intervals I2 and I3 . Consider the following construction: p1 fb; fgI1, p1 fb; fgI2, p1fb; fgI3, p2fb; fgI1,
p2 fd; agI2, p2 fb; fgI3, p3 fb; fgI1, p3fb; fgI2 and
p3 fd; agI3. It is fairly straightforward to show that p1
can only be related to I1 with the relation b. Hence,
we can take an instance of the V -SAT(E ) problem and
in polynomial time transform it into an equivalent instance of the V -SAT(D14 ) problem. NP-completeness
of V -SAT(D14 ) follows immediately.
2
Lemma B.14 V -SAT(D16 ) is NP-complete.
Proof: Reduction from V -SAT(D13). Use the model
transformation T4 and apply Lemma A.4.
2
Lemma B.15 V -SAT(D18 ) is NP-complete.
Proof sketch: By Lemma B.10, V -SAT(D7 ) is NPcomplete. Let E = ffsg; fs; fg; fb; dgg. It can be
veried that D7 CV (E ) and, hence, V -SAT(E ) is
NP-complete. Let be an arbitrary instance of the
V -SAT(E ) problem.
We show how to relate a time point p1 and an
interval I1 with the relation s. Introduce two
fresh time points p2 and p3 together with a fresh
time interval I2 . Consider the following construction: p1 fs; fgI1, p1 fb; dgI2, p2fb; dgI1, p2fs; fgI2,
p3 fs; fgI1 and p3 fs; fgI2.
It is not hard to show that p1 can only be related to
I1 with the relation s. Consequently, we can take an
instance of the V -SAT(E ) problem and in polynomial
time transform it into an equivalent instance of the V SAT(D18) problem. NP-completeness of V -SAT(D18 )
follows immediately.
2
Lemma B.16 V -SAT(D20 ) is NP-complete.
Proof sketch: Reduction from A-SAT(S37) which
is NP-complete by Lemma B.6. Let be an instance
of A-SAT(S37 ). We construct a set 0 as follows.
1. For each formula of the type Is3 J in , introduce a new time point
p
and let p fs; fgI
and p fs; fgJ in 0 ;
2. For each formula of the type Is3 J in , introduce a new time point q and let q fs; fgI and
q fb; agJ in 0 .
Clearly 0 is an instance of the V -SAT(D20 ) problem.
Proving that is satisable i 0 is similar to the
proof of Lemma B.10.
2
Lemma B.17 V -SAT(D21 ) is NP-complete.
I ;J
I ;J
I ;J
I ;J
I ;J
In the proof we will make repeated use of the concept of a separator, a construction which forces two
points to have distinct values in all models. Given
two points p; q we construct a separator by introducing a new interval I and adding the relations pfs; fgI
and qfb; d; agI . Clearly, all models = must satisfy
=(p) 6==(q).
We now construct the set of relations stepwise. First,
we construct a paint-box by introducing two points p1
and p2, two intervals I1 and I2 plus the relations
p1fs; fgI1; p1fs; fgI2; p2 fs; fgI1; p2 fb; d; agI2
I ;J
Proof: Reduction from V -SAT(D14). Use the model
transformation T1 and apply Lemma A.4.
2
Lemma B.18 V -SAT(D23 ) is NP-complete.
Proof: Reduction from V -SAT(D12). Use the model
transformation T3 and apply Lemma A.4.
2
Lemma B.19 V -SAT(D25 ) is NP-complete.
Proof: Reduction from V -SAT(D14). Use the model
transformation T3 and apply Lemma A.4.
Lemma B.20 V -SAT(D27 ) is NP-complete.
2
Proof sketch: By Lemma B.10, V -SAT(D7 ) is NPcomplete. Let E = ffbg; fb; fg; fs; agg. It can be
veried that D5 CV (E ) and, hence, V -SAT(E ) is
NP-complete. Let be an arbitrary instance of 0 V SAT(E ). We show how to construct an instance of
V -SAT(D27 ) that is satisable i is satisable.
We begin by showing how to relate a point p1 and an
interval I1 such as p1fbgI1 by only using the relations
in D27 . We introduce two fresh time points p2 and p3
together with a fresh time interval I2 . Consider the following construction: p1fb; fgI1, p1 fb; fgI2, p2fb; fgI1,
p2 fs; agI2, p3 fs; agI1 and p3fb; fgI2.
It is fairly straightforward to show that p1 can only be
related to I1 with the relation b. Hence, we can take an
instance of the V -SAT(E ) problem and in polynomial
time transform it into an equivalent instance of the V SAT(D27) problem. NP-completeness of V -SAT(D27 )
follows immediately.
2
Lemma B.21 V -SAT(D28 ) is NP-complete.
Proof: Reduction from Graph 3-Colourability,
which is NP-complete. Let G = hV; E i be an arbitrary
undirected graph.
over these. Note that the interval I2 acts as a separator for p1 and p2 , which are thus forced to take on
dierent values. Further, the intervals I1 and I2 must
have some common end-point, coinciding with p1 . We
use the constant r to denote this value. Hence, the
remaining end-point of I1 must coincide with p2 and
the remaining end-point of I2 must be distinct from
both p1 and p2. We denote the values of these two
remaining end-points g and b respectively. We can
think of the values r, g and b as colours, constituting
our palette. Of course, the actual denotations of these
three values dier between models, but the important
thing is only that they denote three distinct values in
each and every model.
Now, for each vertex v 2 V , we construct a selector
consisting of three points q0 , q1 and q2 plus two intervals J 0 and J 1 2 , connected as follows. First introduce
a separator for q1 and q2 , using interval J 1 2, i.e. introduce the relations q1 fs; fgJ 1 2; q2 fb; d; agJ 1 2: Then
connect the points to the remaining interval by adding
the relations q0fs; fgJ 0; q1fs; fgJ 0; q2fs; fgJ 0: Finally, connect this whole gadget to the paint-box by
adding the relations q1fs; fgI1; q2 fs; fgI2: The selector works as follows. The endpoints
of I1 correspond
to the colours r and g, so q1 is forced to have either of
these values. Similarly, q2 must have either of the values r and b. Now, q1 and q2 are separated, so together
they select a subpalette of two colours, assigning one
colour each to the end-points of J 0 . Finally, q0 selects
one of these two colours. So far, there are no further
constraints, so q0 may be freely assigned any of the
three colours from our palette.
Finally, for each edge fv ; v g 2 E we introduce a
separator, consisting of the new interval K and the
two relations q0 fs; fgK ; q0fb; d; agK ; preventing
q0 and q0 to have the same value whenever there is an
edge between the vertices v and v .
It is obvious that G is 3-colourable i the network just
constructed is satisable, so NP-completeness follows.
2
i
i
;
i
i
i
i
;
i
i
i
i
i
i
i
;
i
i
i
i
;
i
i
i
i
i
i
i
i
i
i
i
i
j
i;j
i
i
i;j
i;j
j
j
i
j