π σ Recall, for mode I plane strain
advertisement

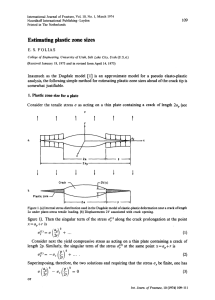
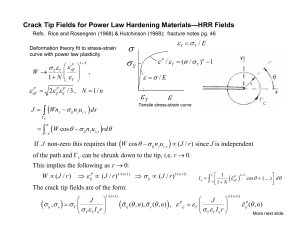
3-D Aspects of the Plastic Zone at Crack Tip for Mode I, Small Scale Yielding Recall, for mode I plane strain in small scale yielding 2 1 ⎛K ⎞ rp ≅ ⎜ ⎟ 3π ⎝ σ Y ⎠ and for mode I plane stress 1⎛ K ⎞ rp ≅ ⎜ ⎟ π ⎝ σY ⎠ 2 Plane strain ssy conditions occur at interior of crack tip if rp << thickness LEFM KIC testing ASTM requirement for valid (LEFM) K IC test: Ref. Chp. 3 Barsoum & Rolfe 2 2 2 ⎛K ⎞ ⎛K ⎞ ⎛K ⎞ t > 2.5 ⎜ IC ⎟ , a > 2.5 ⎜ IC ⎟ , b − a > 2.5 ⎜ IC ⎟ ⎝ σY ⎠ ⎝ σY ⎠ ⎝ σY ⎠ Crack first advances at center of specimen where plane strain holds. Indentation toughness of brittle ceramics and glasses: Cone & Radial Cracks (Reference: B..Lawn Fracture of Brittle Solids, 2nd ed. Cambridge Univ. Press, Chp. 8. a d Cone crack in soda-lime glass under a spherical indenter Dimensional analysis if no residual stress at surface: For a >> d , only important parameters are P ( N ), K ( Nm −3/ 2 ), a (m) : ⇒ K = c i P / a −3/ 2 If a is measured experimentally at load P, then K IC = c i P / a −3/ 2 The constant c depends on whether conical or radial cracking a Radial cracks in soda-lime glass under a Vickers indenter Elements of Nonlinear Fracture Mechanics with Emphasis on Large Scale Yielding For the purposes of this introduction to nonlinear fracture mechanics we will employ the Deformation Theory of Plasticity which is a small strain nonlinear elastic constitutive law and which is only applicable under applications where elastic unloading (load reversal) is not significant. What follows is a one-slide introduction of J2 deformation Theory. σ σY E tensile stress-strain curve ε Denote plastic strain in uniaxial tension by: ε p = f (σ ) 1 −ν ν Elastic strains: ε ije = σ ij + σ kk δ ij E E s 3 Plastic strains: ε ijP = f (σ e ) ij , 2 σe ( ) 1 3 where sij = σ ij − σ kk δ ij and σ e = sij sij = 3J 2 3 2 The total strain is ε ij = ε ije + ε ijp . The relation reproduces the tensile relation in uniaxial stress, and the response is linear elastic for σ e < σ Y , which is the Mises criterion. Moreover, for stress histories that are proportional the predictions coincide with J 2 flow theory (Mises theory). This can be considered as a small strain, nonlinear elastic relation with strain energy density W (ε ij ): ε ij W (ε ij )= ∫ σ mn d ε mn , with σ ij = 0 ∂W ∂ε ij For the purposes below, we will not need an explicit expression for W (ε ij ). J-Integral of Nonlinear Fracture Mechanics (J. R. Rice, 1967) J is the energy release rate for straight-ahead crack advance for the nonlinearly elastic deformation theory solid. For elastic-plastic solids J should not be regarded as the energy release rate, rather a measure of crack tip intensity. As will be discussed. The following is taken from pgs 29-35 of the nonlinear fracture notes. Denote the strain energy/thickness of the cracked deformation theory component by SE (∆, a ), and denote the elastic energy of the nonlinear spring by U M (∆ M ), ∆ M = ∆T − ∆. ∆ Note: SE ( ∆, a ) = ∫ P(∆, a )d ∆, and P = ∂U M / ∂∆ M 0 The potential energy/thickness of the system with ∆T prescribed is PE = SE (∆, a ) + U M (∆ M ) and the energy release rate (J ) is ⎛ ∂PE ⎞ J = −⎜ ⎟ ⎝ ∂a ⎠ ∆T A two line proof in the fracture notes (pg. 31) shows that ∆ ∂P ( ∆ , a ) ∂SE ( ∆, a ) d∆ = −∫ 0 ∂a ∂a which is independent of the behavior of the nonlinear spring. J =− A s in the linear case, J is the same for prescribed load and prescribed displacement. An alternative derivation for prescribed load (see pg. 32 of notes) gives P ∂∆ ( P, a ) ⎛ ∂PE ⎞ J = −⎜ dP ⎟ = ∫0 ∂a ⎝ ∂a ⎠ P The J-Integral There are two steps in the following derivation: 1) showing that the line integral definition of J is path-independent, and 2) showing that this line integral is the rate of change of the energy of the system with respect to crack length. Step 1—path independence Let (σ ij , ε ij , ui ) be a solution to the field equations of small strain ds deformation theory plasticity. Define a line integral about any contour, Γ, by I Γ = ∫ (Wnx − σ ij n j ui , x ) ds Γ Using the divergence theorem, equilibrium, and σ ij =∂W/∂ε ij , one sees that ∫ Wn Γ x ds = ∫ W, x dA = ∫ σ ij ε ij , x dA = AΓ AΓ ∫ (σ AΓ u ) ij i , x , j dA = ∫ σ ij n j ui , x dA ⇒ I Γ = 0 Γ This holds for any simply connected region within which the solution is well behaved. B Γ2 Γ1 A ⇒ ∫ (Wn Γ1 x − σ ij n j ui , x ) ds = ∫ (Wn Γ2 x − σ ij n j ui , x ) ds J-Integral– continued. Step 2-- I C = J c.f. pages 33-34 of notes Consider a crack of height b advanced da as shown. The potential energy of the system is ∫ W (ε)dA − ∫ T PE (a ) = i A( a ) 0 ui ds ST Under prescribed load conditions, let ( ( PE )• = − ∫ Wnx ds + Γ0 ∫ A( a ) • ) = ( ∂ ( ) / ∂a ) L W (ε)dA − ∫ Ti 0ui ds ⎛ ∂W But, ∫ W (ε)dA = ∫ ⎜ ⎜ ∂ε ij A( a ) A( a ) ⎝ ST ⎞ o ⎟⎟ ε ij dA = ∫ σ ij ε ij dA = ∫ σ ij u j ni ds = ∫ Ti u j ni ds A( a ) S ST ⎠ Thus, (PE )• = − ∫ Wnx ds = − ∫ (Wnx − σ ij n j ui , x ) ds Γ0 Γ0 Now, by path independence (PE )• = − ∫ (Wnx − σ ij n j ui , x ) ds ΓC for any countour, ΓC ,surrounding the crack tip. Since, J = −(PE )• , J= ∫ (Wn x − σ ij n j ui , x ) ds ΓC For a remote contour, one argues heuristically that the result applies as b shrinks to zero. For linear elasticity, one can show directly with aid of mode I crack tip fields 2 J =G= K /E which also holds in ssy Dugdale-Barenblatt Model (pgs. 35-40 of notes) Consider a crack of length 2a in an infinite sheet (plane stress) subject to remote tension perpendicular to the crack line. The sheet is elastic-perfectly plastic. Dugdale observed that in mild steel sheets (with a upper/lower yield behavior), that narrow plastic zones of height on the order of the sheet thickness, t, extended ahead of the crack tip as depicted below. σ 0 ∼ yield stress, s ∼ plastic zone lLength, σ ∞ ∼ remote stress, L = a + s Dugdale made use of the solution (see Tada, et al for the most direct source) for the elastic crack problem of length 2L, where the yield stress acts over the end of each crack as depicted. For given crack length 2a, applied stress and yield stress, there is only one value of s such that the stress at x=L is bounded, with the distribution shown below to the right. That choice is given by ∞ s 2 ⎛π σ = 2sin ⎜ L ⎝ 4 σ0 σ∞ σ0 ⎞ ⎟, ⎠ ⎛π σ∞ s or , = sec ⎜ a ⎝ 2 σ0 1 ⎞ ⎟ −1 ⎠ s/a Dugdale Model -- continued The crack tip opening displacement is (with ε 0 = σ 0 / E ) ⎡ ⎛ π σ ∞ ⎞⎤ δ t = u2 (a, 0 ) − u2 (a, 0 ) = ε 0 a ln ⎢sec ⎜ ⎟⎥ π ⎣ ⎝ 2 σ 0 ⎠⎦ + − 8 See notes pg 37 for evaluation of J in terms of δ t : ⎡ ⎛ π σ ∞ ⎞⎤ 8 σ 0ε 0 J = σ 0δ t = a ln ⎢sec ⎜ ⎟⎥ π E ⎣ ⎝ 2 σ 0 ⎠⎦ (The result, J = σ 0δ t , is valid in all cases, not only the infinite sheet problem.) 1 Small scale yielding (ssy) For σ ∞ / σ 0 << 1, to lowest order in σ ∞ / σ 0 , the above expressions become: 2 2 ⎛σ ⎞ s π ⎛σ ⎞ , J a = = πσ ε ⎜ ⎟ ⎟ 0 0 ⎜ a 8 ⎝ σ0 ⎠ ⎝ σ0 ⎠ which are compared with the exact results in the plot. 2 ∞ ∞ Since, for this problem, K = π a σ ∞ , and thus: σ∞ σ0 0.8 0.6 Exact (large scale yielding) small scale yielding 0.4 0.2 2 s π⎛K⎞ K2 = ⎜ ⎟ , J = σ 0δ t = a 8 ⎝ σ0 ⎠ E 0 0 1 2 3 4 JE /(σ 0ε 0 a) or δ t /(ε 0 a ) 5 Dugdale Model -- continued Fracture criterion (initiation) : critical crack tip opening- CTOD criterion: δ t = δ tC or, equivalently, critical J criterion : J = J C (= σ 0δ tC ) Denote applied stress at attainment of J C by σ C∞ . Exact Model (Large scale yielding--lsy) : ⎡ ⎛ π σ C∞ ⎞ ⎤ = ln ⎢sec ⎜ ⎟⎥ σ 0ε 0 a π ⎣ ⎝ 2 σ 0 ⎠ ⎦ For small scale yielding (ssy) (which is identical to LEFM) JC 8 ⎛ σ C∞ ⎞ =π ⎜ ⎟ σ 0ε 0 a σ ⎝ 0⎠ JC a J C /(σ 0ε 0 ) 2 See plot for comparison of lsy and ssy predictions. For this configuration, the lsy prediction is reasonably accurate (to within 10%) as long as the applied stress is less than ½ of the yield stress. At higher applied stresses, the ssy (LEFM) is not reliable. In this case it over estimates the stress for initiation of fracture initiation. A rough rule for most applications is that LEFM should not be applied when the applied load exceeds about 50% of the plastic limit load.