Safe Driving Using Android Based Device
advertisement

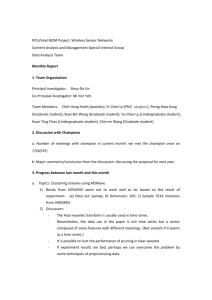
International Journal of Engineering Trends and Technology (IJETT) – Volume 18 Number3 - Dec 2014 Safe Driving Using Android Based Device Shubhangi Pargaonkar#1 ,Diksha Jawalkar#2 ,Reshma Chate#3 ,Shivani Sangle#4 ,M.D.Umale#5, S.S.Awate#6 1234 Student, 56Asst.Prof, Computer Dept., DCOER, Savitribai Phule Pune University, India Abstract— In the present world we all do see the rise in road accidents and also experience that very few measures are taken to avoid such accidents before they occur. Global status report on Road safety, 2013[5] shows that India is one of the countries where highest number of road accident cases and injuries are found. All efforts made so far regarding road safety with the help of Advance Driver-Assistance Systems (ADASs) has not been much helpful to make any driver aware of the road conditions. Mobile phones especially smart phones presently are well equipped with efficient sensors and other many features that can together form a portable device to monitor road conditions. In this paper, we tend to use Android-based Smartphone with its internal accelerometer to analyze various road conditions and driving behaviors. With its effective data generation we try to increase driver awareness to operate any vehicle and also give a clear idea about the roads they may travel. Keywords— Mobile phones, Road safety, Accelerometer, Road anomalies. I. INTRODUCTION Seeing today‟s lifestyle, we realize that people mainly focus on reaching any destination with quick speed and comfort. However, the world in rush is moving farther away from „living‟ peace and being pushed towards peace of graveyard. The major factors that contribute to maximum road accidents are hazardous road conditions and sudden vehicle maneuvers that are unknown to any person behind the wheel. Reducing such road accidents is possible by proper monitoring of road anomalies (potholes, bumps, smooth, rough and uneven roads) and studying different driving behaviors (speed and shifting along with acceleration and deceleration). Increasing safety and thereby saving lives is one of the key features in Advance Driver Assistance System (ADAS) which is an important component in Intelligent Transportation System (ITS).Sadly most of the vehicles manufactured with useful ADAS packages are not any cheap add-ons and require heavy sensors. Using an Android-based mobile device for such purposes can be considered as a new approach that equally contributes to minimize cost burden. We will first discuss some prior work done in the field of road anomalies detection using a mobile phone. ISSN: 2231-5381 The Nericell [1] is a system whose sensing functions are supported by participation of a mobile device; the system includes honk detection and localization for traffic conditions and examines few road conditions like bumps, potholes, and vehicle braking using external sensor. There has been some previous work on detection of driving behaviour [2] which compares normal driving behaviour with typical drunk driving patterns and makes use of mobile phones as alert giving component. Also there is a hand-held real-time [3] Lane Departure Warning System (LDWS) which can easily be mounted on any vehicle to improve driver safety. So when we deeply study and observe these mentioned techniques in this area of road safety we come to know that they include sensors that record data appropriately but show less accuracy using poor warning system for collision avoidance and/or show no proper generation of recorded data. We use a multipurpose device that is an android based smart phone that includes Global Positioning System (GPS), microphones and accelerometer that collectively act and help to advise the vehicle operator on harmful external conditions and road anomalies that occur due to environmental factors. From Nericell system we get to understand that the device location and orientation should be configured properly inside the car for specific accurate readings. Google Earth is used to create maps of road condition using GPS coordinates. Such pictorial representation of the recorded data helps to easily understand vehicle operation and driving behaviour in different situations and gives awareness regarding the roads or say routes to be travelled. II. EXISTING METHODS A. Nericell System Nericell word is taken from „Nerisal‟ which is a Tamil word for defining congestion. This system gathers information through rich sensing functionalities and provides solutions for congestions occurring on roads. It makes use of http://www.ijettjournal.org Page 151 International Journal of Engineering Trends and Technology (IJETT) – Volume 18 Number3 - Dec 2014 external Sparkfun WiTilt accelerometer, relies on GSM radio based localization that helps to trigger GPS to obtain accurate locations, microphones or GPS sensors all together on a smart phone to detect braking activity, honking and different road anomalies like bumps and potholes are also identified. But it fails to notify or detect whether roads are smooth, uneven or rough. Such additional complexities of roads are easily classified and shown by our system. Nericell consists of very complicated hardware and software setup. Some of the experiments carried out by Nericell system in India makes the use of virtual reorientation algorithm that runs on HP iPAQ Smartphone running Windows Mobile 5.0.This algorithm is supported with measurements collected from external accelerometer via a serial port interface on its Bluetooth radio. But the energy savings is a complex issue which depends on specific additional settings to be made in this system. Nericell mostly focuses on traffic conditions. The recorded result in this system is conveyed to a service in the cloud. This cloud service is for aggregation and reporting. In this way we understand that Nericell does not cover all the necessary aspects for road safety. B. Mobile Phone Based Drunk Driving Detection Method Here the posture of the device is decided by the orientation angles yaw, pitch and roll. This tends to increase the working and puts a burden on the functioning of the mobile. Whereas our system only uses simple three-axis (x, y, and z) accelerometer for overall recording and generation of different driving behaviors. Here the mobile device also acts as the warning component but fails to give any type of alert if its battery life comes to an end or any internal error occurs. We realize that the system totally collapses if any one module stops working. We also understand that the system may fail to avoid accidents if no positive response is given by the driver on time. C. Lane Departure Warning System Lane Departure Warning System (LDWS) provides results for improving driving safety. The system is an embedded real-time LDWS which is based on ARM (Advanced RISC Machines). It helps to show two situations one is when the driver gets too close towards the lane boundaries or secondly when the respective vehicle approaches any lane boundaries in too fast manner. The main error of this system is that it focuses only on lanes and not road conditions like sharp tortuous paths or other such non-flat roads which can be equally dangerous. In this system the Lane Departure Detection is based on Spatial and Temporal mechanism which requires many formulas. It also requires maintenance of hundreds of frames via video clips from Liquid-Crystal Display (LCD), since it uses a Frame-based Day Time and Night Time evaluation. For its hardware there is different core architecture and software setup of the system has different input/output module, storage and power supply module. This adds too many limitations and does not allow the system to present a single portable device. The system performs poorly at night time due to lack of sufficient illumination. This particular system mainly aims at early detection of dangerous driving habits typically related to the drunk drivers and it accurately alerts such drivers of making dangerous moves or at times makes a call to the police for help. For experimental results this system has tested and categorized regular and drunk driving behaviors. The experiments of this system require a vast range of test sets to be carried out for both types of behaviors. The maintenance and processing of such large information requires lots of time and complicates the analysis. It makes use of Android G1 phone for implementation. There is a detection algorithm applied to the mobile device which is based on different latitude and longitude III. PROPOSED WORK accelerations, it uses additional calibration procedure to solve the problem related to position By our proposed system we try to present an easy of the device. Both orientation sensor and remedy for uprooting some of the above drawbacks accelerometer are used from the mobile device. ISSN: 2231-5381 http://www.ijettjournal.org Page 152 International Journal of Engineering Trends and Technology (IJETT) – Volume 18 Number3 - Dec 2014 of the previous systems. Our effort is to introduce a widely used, easy to handle, real-time portable device which helps to minimize the costs and improve the road safety. A. System Overview Proposed system requires dedicated sensors present on smart phones. If any movement is detected it is numerically analysed and can be shown in specific directions. Driving maneuvers are found and differentiated by use of each individual axis in the embedded accelerometer. When such values are recorded, further we need to extract the location. This is done by the GPS latitude and longitude coordinates which are then sent to the respective server. Maps are easy to read and can be understood by any type of driver before beginning the journey or on the way. After getting the road conditions, exact GPS based location can be found out and simultaneously can be mapped on the Google Earth. So for any user travelling through a new route such representation of recorded data can help to improve safety. Program Interface (API) contains many functions and classes to control the cellular devices. In general the phone and its (x,y,z) axes could be in an arbitrary orientation with respect to the vehicle and its (X,Y,Z) axes. We take the accelerometer value for a single GPS value and denote the accelerometer value as a segment of a particular area. The orientation of the phone is fixed in specific positions. Experiments carried out for this suggest, for road condition analysis it must be firmly secured to the floor board of the front passenger section. There were 1-5 locations in which the phone was tested to measure driving maneuvers. In an embedded accelerometer the x-axis identifies the left/right directions which can be used to indicate turning/lane changes, similarly the yaxis identifies front/rear directions in a car to detect acceleration and braking and z-axis detecting up/down directions to identify sharp vibrations or different road anomalies on the roads. We also make use of Java which is well suited to help software developers to meet the challenges and seize opportunities, because java was mainly designed for networks. Differentiating a pothole from a bump or any such comparison of the different road anomalies is possible by setting specific threshold values for each accelerometer axis. Fig. 2 Phone orientation and location inside a car [4] Fig. 1 System Overview for Safe driving using android-based device The device should have Wi-Fi through which it will be possible to connect to the server. Network We include the usage of an android-based device gives the functionality to login and registration Smartphone which is easy to handle by all users and facility. With the use of Wi-Fi network we plan to consists of some effective sensors which helps to create our own communication protocol. Google reduce the cost burden. The Android Application Map Handler will help to generate road map for B. Overall Setup ISSN: 2231-5381 http://www.ijettjournal.org Page 153 International Journal of Engineering Trends and Technology (IJETT) – Volume 18 Number3 - Dec 2014 safety. We make use of a color code technique which is assigned to certain interpolated values for segments. For example Red color can be used to represent bumps, blue color to represent pothole, smooth road can be shown by green color and so on. One of the experiments carried out obtained 85.6% accuracy for overall road anomaly classification system. The user of this product/system can be any citizen who has an android phone. bumps, potholes, smooth, uneven, rough roads with the help of simple embedded accelerometer. Along with these findings we also try to advice on safe acceleration and sudden lane changes. Visual representation of all such road situations is made easy by usage of Google maps which are widely used. This helps to easily improve overall driving experience in today‟s rushing lifestyle. In future scope we plan to extend our work to auditory alerts of these factors. IV. CONCLUSION AND FUTURE WORK REFERENCES In this paper we use the three-axis accelerometer of an android-based mobile device to analyze various road conditions and driving behaviors that turn out to be some major reasons for increasing road accidents. Such information collected and generated, helps to provide preventive measures to be taken to avoid road accidents before they occur. It helps to educate the driver and make aware about new routes with its overall integrity. Our work reveals the roads to be more complex .We identify ISSN: 2231-5381 [1] [2] [3] [4] [5] P.Mohan, V.N.Padmanabhan, and R.Ramjee,”Nericell:Rich monitoring of road and traffic conditions using mobile smart phones.” in Proc. ACM SenSys. Raleigh,NC,Nov. 2008. J. Dai, J. Teng, X. Bai, Z.Shen and D. Xuan,”Mobile phone based drunk driving detection,” in Proc. 4th Int. Conf. Pervasive Health-NO PERMISSIONS, Mar. 2010. P.-Y. Hsiao, C.-W. Yeh, S.-S. Huang, and L.-C. Fu, “A portable vision based real-time lane departure warning system: Day and night,” IEEE Trans. Veh. Technol., vol. 58, no. 4, pp. 2089–2094, May 2009. He, Z.; Cao, J.; Liu, X.; Tang, S., “ Who Sits Where? InfrastructureFree In-Vehicle Cooperative Positioning via Smartphones.” Sensors 2014, 14, 11605-11628.pp. 11609,May 2014. https://rkshenoy.files.wordpress.com/2014/07/road-fatalities20101.png http://www.ijettjournal.org Page 154