An Approach for Optimized Timing of Error Correcting Unordered Codes
advertisement

International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
An Approach for Optimized Timing of Error Correcting Unordered Codes
Nida Yasmeen1, Sudhir Dakey2
1
Post Graduate Student, Department of Electronics and Communication,MVSR Engineering College,Hyderabad,India-500510
2
Associate Professor, Department of Electronics and Communication,MVSR EngineeringCollege,Hyderabad,India-500510
Abstract - This Paper proposes an approach for
reducing latency in asynchronous communication.
This paper uses a new family of error correcting
unordered codes for global communication called
Zero Sum. The important feature of the zero sum
is that they are systematic, allowing direct
extraction of data, and weighted, where the check
field is computed as the sum of data index weights.
The zero sum, family of error correcting codes
consists of basic zero sum ecu code, zero-sum+ and
zero-sum* which detects multiple errors. Each
transmission includes a time-out mechanism. That
is, there is a notion of time window of
transmission, which can be made arbitrarily long,
but must be defined by the user. The proposed
approach to reduce simulation time which is taken
by time-out mechanism and proposed architecture
has been evaluated and proved to have better or
comparable timing efficiency, about 93%. zero
sum codes were simulated using modelsim tool
version 10.2b.
Keywords- asynchronous, delay insensitivity, error
correction, fault tolerance, systematic, timing
robustness
I.
INTRODUCTION
Continuous
technology
scaling
enables
implementation of complex application on a single
chip. This remarkable development is the result of
technology scaling that led to fabrication of Integrated
Circuit (IC) with smaller feature sizes, higher levels
of integration and faster operating frequencies. The
process of device scaling evolved from few
micrometers to nanometres today, and the circuit
complexity has advanced from Small-Scale
Integration (SSI) in 1960s to Giga-Scale Integration
(GSI) in 2000s. The performance of transistors is
continually improved through scaling. However, the
impact of technology scaling on long wires is reverse.
Hence, coordination and communication between
these components become challenging. Globally
Asynchronous Locally Synchronous (GALS) scheme
has been proposed as a solution. [5], to provide
flexibility in system integration. Some recent
ISSN: 2231-5381
applications of asynchronous global communication,
using delay-insensitive (DI) codes [5]. The
contributions of this paper are centered around a
family of error-correcting unordered (ECU) codes for
use in asynchronous global communication, called
Zero-Sum [1], [2],[3]These codes support two types
of robustness: timing-robustness, fault tolerance. By
the use of DI codes we can achieve timing robustness
and fault tolerance provides error correction and
detection.
All introduced Zero-Sum codes are systematic
[2],where data appears in unaltered form in each
codeword and can be directly extracted by the
receiver without any decoding hardware. They are
also weighted, where the check field is computed as
the sum of data index weights.
The basic method for generating the ZeroSum code builds on a prior approach briefly
introduced by Berger [8] and Bose [7]. In addition,
neither practical hardware support was provided nor
experimental evaluation was performed.
The key contributions of this paper are as
follows.
1) Defining the complete family of Zero-Sum codes,
by exploring the feasible space of index weight
assignments and permutations.
2) A new code, called Zero-Sum+, which guarantees
detection of up to 3-bit errors, or alternatively can
simultaneously support 1-bit correction and 2-bit
detection. These codes can also detect all odd
numbers of errors.
3) Zero-Sum* code,
which extends Zero-Sum+
through a
variety of weight assignment
strategies, to heuristically provide a high coverage for
2- bit correction.
4) An outline of the overall micro architecture and
system level asynchronous communication protocol.
5) A comparative evaluation of the proposed ZeroSum code approach
II. Background
Background and related work on asynchronous
communication and error correction are now briefly
reviewed. A brief review of the Zero-Sum code is also
presented.
http://www.ijettjournal.org
Page 3277
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
A. Point-to-Point Asynchronous Communication
The family of zero-sum codes assume
point-to-point communication [5] between a sender
and a receiver.
1) Asynchronous Communication Channels
Unlike synchronous design style which uses
a globally distributed clock signal to indicate
moments of stability of the data, asynchronous
circuits exchange information using handshakes to
explicitly indicate the validity and acceptance of data.
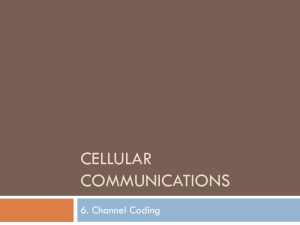
Abstractly, the sender provides a
request output signal (REQ) to the receiver. The
receiver in turn provides an acknowledgment input
signal (ACK) to the sender. If the sender passes actual
data to the receiver the REQ is typically replaced by
the encoded data, as shown in the Fig 1. A codeword
is placed by the sender on the data channel (where
each wire corresponds to a bit of the codeword), and
passed to the receiver. The ACK indicates that data
has been received by the receiver and new data can
eventually be sent.
Receiver
Sender
ACK
Fig. 1 Point-to-point asynchronous communication
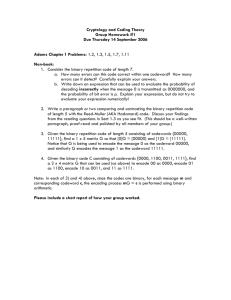
ACK+. At this point, the reset operation begins. The
sender de-asserts the REQ− and in turn, the receiver
de-asserts its ACK− which is the final event of the
reset stage and the four-phase transaction. If data is
used, the data channel replaces the REQ wire. The
channel is initially all-0 (spacer state); data is
transmitted by asserting high the individual 1 bit of
the codeword (equivalent to REQ+); data is reset after
receiving ACK− by de-asserting low the individual 1
bit (equivalent to REQ−).
TABLE I
Four phase communication
EVEN
Data
0
1
0
Phase/parity
0
1
0
Logic
0
1
Null
3) Two-Phase Communication Protocol
Two phase handshaking
protocol where the information is carried by the
transition. Both rising and falling transitions are
equivalent, each being interpreted as the two-phase
protocol passes data using a request signal transition,
and acknowledges data reception with an
acknowledge
signal
transition.
Two-phase
handshaking is preferred for long on-chip
communication since it reduces the required number
of transitions by half and avoids the requirement of
spacer compared to four-phase signalling This saves
communication time and energy of the system
significantly.Therefore a four phase asynchronous
communication protocol is assumed in this paper.
2) Four-Phase Communication Protocol
Evaluate
operation
Reset
operation
REQ
ACK
Fig. 2 Four Phase protocol
Given an asynchronous communication
channel, a protocol is needed to transfer information
from sender to receiver. The most widely used
protocol is four-phase or return-to-zero (RZ) [5]. As
illustrated in Fig. 2.The protocol has two operations:
a) evaluate, and b) reset. During the evaluate
operation, the sender first indicates the start of an
event by issuing a rising REQ+ to the receiver. Once
this signal has been received, the receiver asserts an
ISSN: 2231-5381
3) DI Codes
The
delay-insensitivity
makes
the
communication robust and attains average-case
performance rather than worst case which is the
situation in communication based on timing
constraints. The delay-insensitivity makes the data
transfer robust, because the sender and the receiver
modules can communicate reliably regardless of
delays in the transceivers and wires. Delay-insensitive
data encoding technique requires 2N wires to transmit
N-bit data. When asynchronous communication is
used, data must be suitably encoded so that the
receiver can identify when a packet has been received.
DI codes [4], (i.e., unordered codes [6]) are
insensitive to propagation delays on individual bits in
a codeword. The key property is that no valid
codeword is covered by another.
Assuming a four-phase protocol, where the
channel is reset to all-0 (i.e., spacer) between
successive
transmissions,
the receiver
can
unambiguously identify the arrival of a valid
codeword. In particular, as the individual 1 bit of a
codeword arrive (i.e., rising wire transitions), no other
http://www.ijettjournal.org
Page 3278
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
Table III
codeword will be seen transiently during the
transmission, since the 1-bit pattern of each valid
codeword is never covered (i.e., not a subset) by any
other. As the bits arrive, several codeword may be
candidates for the transmitted one, but a unique valid
codeword will only be seen when precisely all bits
have arrived. As a result, in an asynchronous system,
these codes have an inherent timing-robustness, where
individual bits of a codeword can arrive in any order
and at any time during transmission, and the final
valid codeword can be uniquely identified.
2-bit zero-sum code
Dataword
indices
weights
i 5 I4
53
00
Check
bits
i3 i 2 i 1 i 0
8421
1000
01
0101
10
0011
11
0000
Table IV
4-bit zero sum code
Indices
Weights
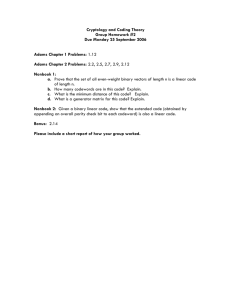
Fig. 3 Delay Insensitive
For example consider Fig. 3, the data to be trans
mitted is 1011 and four phase protocol requires 2N
lines for N data bits .according to table I, the data
forms as in Fig. 3.First null bits transmitted, then data
bits. After every data bits null bit is transmitted. The
data bit is valid if and only if there is a null bit after
databit.
III. RELATED WORK
A .Basic Zero-Sum Code:
This section reviews the basic Zero-Sum code. This
code uses the single index weight assignment only
briefly discussed in Berger [7] and Bose [10]..Code
construction combines aspects of both Hamming
codes and Berger [7] codes. In particular, as in Berger
codes, the pattern of 0 bit in the dataword is used to
generate the DI field. However, while the Berger
method counts the number of 0s, the Zero-Sum
approach adds the 0-bit index weights. Similarly,
Zero-Sum adopts the bit index numbering scheme
used in Hamming codes, but typically requires extra
bits.
TABLE II
3-bit Zero-sum code
indices
weights
Dataword
I6 i 5 I4
65 3
000
Check bits
i3 i 2 i 1 i 0
8421
1110
001
1011
010
1001
100
1000
011
0110
101
0101
110
0011
111
0000
ISSN: 2231-5381
Dataword
Check Bits
i8 i 7 i 6 i 5
7 6 5 3
0000
I4 i3 i 2 I1 i 0
16 8 4 2 1
10101
0001
10010
0010
10000
0100
01111
1000
01110
0011
01101
0101
01100
1001
01011
0110
01010
1010
01001
1100
01000
0111
00111
1011
00110
1101
00101
1110
00011
1111
00000
B. Code Overview
The code has two fields: dataword, and
check. Each bit position is assigned an index. The
check bits index weights are powers-of-two (for
nonnegative exponents), and the dataword index
weights are the remaining positive integers [1]. Fig 2
shows examples of zero sun ECU codes for 2 bit, 3bit,4-bit data fields
1) Check Field Generation
The Zero-Sum code uses a unified check
field, based on single operation: it is binary
representation of the arithmetic sum of the dataword
http://www.ijettjournal.org
Page 3279
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
index weights whose bit is 0, hence the name of the
codes, Zero-Sum Code length calculation, the check
field must be Large enough to cover binary
representation of all data fields.
Therefore, the total number of check bits allocated is
the log2 (_dataword index weights) + 1.the equation
becomes with check field length k in terms of data
field length n
k = log2 ([(n + µ)(n + µ + 1)/2] − 2µ + 1)
Where µ is given by
2µ−1 < n+µ < 2µ
,
B. Zero sum + codes
The codeword structure is the same as the original
Zero-Sum Code, but the difference is in data field
indices. . It provides two alternative modes. In one
mode, up to 3-bit errors and all odd errors can be
detected. In a second mode, both correction and
detection can be handled together: every 2-bit error
can be detected and every 1-bit error can be corrected
1) Overview
Start
Input the Data (n
bits)
Yes
Data [n]
=0
No
No
Example 1: suppose there is an error in transmitting
the 4-bit dataword 1010, due to a flip in the data bit
with index 7 (i.e., erroneous dataword 0010),
transmitted with the original error-free check field
(i.e., 01001). The newly calculated check field, based
on the corrupted dataword, is 16 (i.e., 7 + 6 + 3).
Therefore, the syndrome is 16 − 9 = 7, which is
nonzero and not a power of- two. This syndrome
therefore precisely identifies the index (i.e., 7) of the
corrupted data bit. In contrast, if a single check bit has
an error, the syndrome will be a power-of-two and
identify the corresponding index of the corrupted
check bit.
Add the
weight
indices of
data word
It is essentially a Zero-Sum code with parity
bit attached. The new field is the parity bit, which
provides even parity. Its index weight is 0.
2) Error Detection
Error detection mode can detect up to 3-bit
errors and all odd numbers of bit errors. In the case of
0 errors in the received codeword is where the parity
is correctly set to even and the syndrome is equal to 0.
If a 1-bit error occurs in either the dataword or the
check fields, the syndrome will be nonzero. When a
2-bit error occurs, the parity of the received codeword
will be correctly set to even; however, the syndrome
is guaranteed to be nonzero.
Is data
word
length=0
Yes
Print the data,
check bits
Stop
Table V
4-bit Zero-sum+
Fig. 4 zero sum code encoding
indices
Weight
2) Detecting and Correcting a 1-Bit Error
The Zero-Sum ECU code provides a
unified syndrome which is a single positive integer:
the absolute value of the difference between the
appended check field and a newly calculated check
field. In Zero-Sum, the receiver creates a regenerated
check field C ‘ from its data field, and compares C’
to the actual received check field C. The resulting
Zero-Sum syndrome, is the absolute difference of |C’
− C|. If the difference is zero, there is no error. The
syndrome is also used to correct a 1-bit error: its value
is theindex of the corrupted bit.
ISSN: 2231-5381
Dataword
Check bits
Parity
I9 i 8 i 7 i 6
7 6 5 3
0000
0001
0010
0100
1000
0011
0101
1001
0110
1010
1100
0111
1011
1101
1110
1111
I5 i 4 i 3 I2 i 1
16 8 4 2 1
10101
10010
10000
01111
01110
01101
01100
01011
01010
01001
01000
00111
00110
00101
00011
00000
I0
0
1
1
0
1
0
1
0
1
0
0
1
0
1
1
1
0
http://www.ijettjournal.org
Page 3280
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
TABLE VI
Zero-Sum+ Error Detection Classification
# of errors
0
1
2
3(or odd)
Parity
Even
Odd
Even
Odd
Syndrome value
Zero
Zero or nonzero
Nonzero
Zero or nonzero
Approach 1: Basic Unoptimized Method:
1. Generate all possible original code words.
2. Find the syndromes
3.Prune code words based on the syndrome.
Table VIII
4-bit Zero-sum * code
3) Error Correction:
Indices
weights
Table VI gives correction methods for a zero
sum + .When 0 errors occur, the parity is even and
syndrome values are correct.
TABLE VII
Zero-Sum+ Error Correction Classification
No. of
errors
0
1
Parity
Even
Odd
Syndrome
value
Zero
Nonzero
2
Odd
Zero
Error
handling
None
1-bit
correction
Toggle parity
Therefore, no error handling method is applied. When
1 error occurs, there are two cases. If the error occurs
in either the dataword or the check fields, the
syndrome value is nonzero and the parity is
incorrectly set to odd. The error correction is handled
in same way as presented in section III.
C. Zero-Sum* Code:
The codes support heuristic multi-bit
correction by varying the index weight assignment
Check bits
Parity
I9 I 8 I 7 I 6
3 7 11 5
0000
I5 I4 I 3 I2 I 1
16 8 4 2 1
10101
I0
0
1
0001
10010
0
0010
10000
1
0100
01111
0
1000
01110
1
0011
01101
0
0101
01100
0
1001
01011
0
0110
01010
1
1010
01001
0
1100
01000
1
0111
00111
1
1011
00110
0
1101
00101
0
1110
00011
1
1111
00000
0
TABLE IX
Zero-Sum* Error Correction Classification
1) Overview
The dataword and check fields are assigned
distinct integer weights. The dataword field is
assigned non-power-of-two values {3, 7, 11, 5}, as
shown in Table VIII
2)2-Bit Correction
The Zero-Sum* code can correct all 1-bit
errors and some times of 2-bit errors. Table III
summarizes how each error type is classified and
corrected.
A 1-bit error is corrected by either toggling
the parity bit or using the 1-bit correction method.
Two alternative approaches are proposed to correct 2bit errors. The unoptimized approach performs 2-bit
correction by generating the syndromes of all possible
candidate code words. In the optimized approach,
complete syndromes are not explicitly generated,
instead, a precalculated lookup table is used, and a
targeted evaluation of index pairs which produced the
syndrome is performed.
ISSN: 2231-5381
Dataword
Each candidate codeword that has nonzero syndromes
No.of
errors
0
1
Parity
Syndrome value
Error handling
Even
Odd
Zero
nonzero
1
2
Odd
Even
Zero
nonzero
None
1-bit
correction
method
Toggle parity bit
2-bit
correction
method
is discarded. Such a candidate codeword with a
nonzero syndrome could not have been the original
codeword. If there exists exactly one valid candidate
codeword, then correction can be performed.
Intuitively, one remaining codeword means that there
was precisely one way to reach the received codeword
from a valid codeword in 2-bit flips. This single
remaining codeword is the original sent codeword.
When multiple code words remain, there is ambiguity
in how the received codeword has reached, since any
one could have been the originally sent codeword.
http://www.ijettjournal.org
Page 3281
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
Step 2
Step 2
Dataword
I9 I 8 I7 I6
indices
Dataword
Check bits
Parity
Candidate
Indices
I9 I 8 I 7 I 6
I5 I4 I 3 I2 I 1
I0
Flipped
Codeword
weights
3 7 11 5
16 8 4 2 1
0
indices
syndrome
1 11 1
11111
1
(I9 I 8)
31-0=31
1001
1 11 1 1
1
(I9,I 7)
31-18-13
1010
11111
1
(I9 I 6)
31-12=19
1011
01111
1
(I9 I5 )
15-7=8
weights
sent
codeword
rxd
corrupted
codeword
Parity
I0
3 7 11 5
0010
Check bits
I5 I 4 I 3 I 3
i2i1
16 8 4 2 1
1110
0011
1011
1
0
1
ERROR
Syndrome 31-10=21
Fig. 6 Received codeword with 2-bit errors step 1
0111
0010
--
---
--
---
11011
1
(I8, I3)
27-3=24
--
---
--
---
01111
1
(I6 I5)
15-15=0
[syndrome
zero]
1
(I3, I1)
25-10=15
-0011
11001
{I9,I8 } ------> -3-7=-10
{I9,I6} ---- 3+5=2
{I9,I5} ----- -3+16=13
{ I9,I8} ----- -7+4=-3
----------------{ I9,I8} ---- 5+16=21
{I9,I8 } ---- 4+2=6
{I9,I8} ------ 2+1=3
Value matches
syndrome
Fig. 5 Optimized approach for example: step 2
--
---
Approach 2: Optimized Method:
Generate the syndrome of the received codeword.
Find value for each pair of indices prune pairs based
on the value: An index pair whose value does not
match that of the received codeword’s syndrome is
discarded. This pair could not have been the pair of
indices that flipped to form the syndrome. A 2-bit
error can be corrected when exactly one such pair
exists. Intuitively, this pair precisely represents the
two weights which flipped to create the syndrome.
Otherwise, if multiple pairs exist, then there is
ambiguity about which pair flipped to create the
syndrome.
Example: As shown in Fig.2, when transmitting valid
codeword 0010 01111 1, suppose the receiver
receives codeword 0011 11111 1, where a 2-bit error
occurred
ISSN: 2231-5381
Fig 3: Step 2: find values for each pair of indices
in index pair {i6, i5}. For both bits, the value is
toggled from 0 to 1. Fig. 3 shows the corresponding
steps of the optimized approach. In Step 1, the
syndrome of the received codeword is generated. This
syndrome has a value of 21 (i.e., 31-10). Next, for
each indices pair, the associated value is found. For
example, index pair {i9, i8} has a value of −10 (or −3
− 7) since both bits make a 0 to 1 transition from the
received codeword. For this particular example, there
are 45 (i.e., 10 choose 2) pairs of indices, thus only a
limited set has been illustrated. In Step 3, the pairs are
pruned according to their values, where only pairs
whose values equal the syndrome are kept. The pair
whose value matches the syndrome highlighted in Fig.
10. Since only one pair exists in the example,
correction can be performed. Therefore, flipping
index pair {i6, i5} from the received codeword will
correctly restore the original sent codeword of 0010
01111 1.
IV. TIME-OUT MECHANISM
A time-out signal is asserted if a valid
codeword is not received within a reasonable amount
of time [1]. The time-out counter is activated once the
first 1 bit is received on the input channel, and runs
http://www.ijettjournal.org
Page 3282
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
during the receipt of additional bits of the codeword
[2].
V. RESEARCH WORK
The timeout mechanism the above method as
shown in simulation results takes a simulation of 6160
ns. To increase the speed of the hardware the counter
in the hardware has been removed and the completion
detector has designed to take the valid or invalid
codes at the input not like the one discussed in [1]
,which takes only valid code words and it makes ACK
to ‘1’ to the transmitter and gets corrected it at the
receiver. This takes a time of 400ns of time for
simulation as shown in fig
VI. RESULTS
VIII. CONCLUSION
The above approach focuses on errorhandling in the evaluate phase. Zero-Sum errorcorrecting unordered codes support the design of
asynchronous global communication which combines
two forms of reliability: timing robustness and fault
tolerance. The design without timeout mechanism has
given a pretty good efficient design which has given
93% time efficient design. However there is an area
overhead due to proposed approach.
ACKNOWLEDGMENT
I owe my sincere gratitude to my guide
Mr.Sudhir Dakey (Associate Professor) for guiding
me on regular basis. I thank for his immense support
and his sagacious guidance throughout the project.
REFERENCES
[1] M. Y. Agyekum and S. M. Nowick, “An error-
Fig. 4 simulation time with a time out mechanism
Fig. 5 simulation time without time out mechanism
VII. COMPARISION
TABLE X
Device utilization summary of completion detector with a timer
Number of Slices:
Number of 4 input LUTs:
Number of IOs:
Number of bonded IOBs:
8
15
10
10
out of 960
out of 1920
out of
66
1%
1%
15%
TABLE X
Device utilization summary of completion detector without a timer
Number of Slices:
8 out of 960
1%
Number of 4 input LUTs:
15 out of 1920
1%
Number of IOs:
19
Number of bonded IOBs:
19 out of 66
28%
ISSN: 2231-5381
correcting unordered code and hardware support for robust
asynchronous global communication,” IEEE trans compt.,
vol. 31, no. 1, Jan 2012
[2] M. Y. Agyekum, “Designing delay-insensitive codes for
robust global asynchronous
communication,” Ph.D. dissertation, Columbia University,
New York,Jan. 2011
[3] M. Y. Agyekum and S. M. Nowick, “An delayinsensitive bus-invert code and hardware support for robust
asynchronous global communication,” in Proc. DATE, Mar.
2011, pp. 1–6.
[4] J. M. Berger, “A note on error detecting codes for
asymmetric channels,” Inform Contr., vol. 4, no. 1, pp. 68–
73, 1961.
[5] T. Verhoeff, “Delay-insensitive codes: An overview,”
Distrib. Comput., vol. 3, no.1, pp. 1–8, 1988.
[6] B. Bose, “On unordered codes,” IEEE Trans. Comput.,
vol. 40, no. 2, pp. 125–131, Feb. 1991
[7] B. Bose, “Unidirectional error correction/detection for
VLSI memory,” in Proc.
ISCA, 1984, pp. 242–244.
[8] J. M. Berger, “A note on error detecting codes for
asymmetric channels,” Inform. Contr., vol. 4, no. 1, pp. 68–
73,
1961.
http://www.ijettjournal.org
Page 3283