Introduction to Hodge Theory and K3 surfaces Contents 2
advertisement

Introduction to Hodge Theory and K3 surfaces
Contents
I
Hodge Theory (Pierre Py)
2
1 Kähler manifold and Hodge decomposition
2
1.1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.2
Hermitian and Kähler metric on Complex Manifolds
. . . . . . . . . . . . . . . . . . . . .
4
1.3
Characterisations of Kähler metrics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.4
The Hodge decomposition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2 Ricci Curvature and Yau's Theorem
7
3 Hodge Structure
9
II
Introduction to Complex Surfaces and K3 Surfaces (Gianluca Pacienza)
4 Introduction to Surfaces
10
10
4.1
Surfaces
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2
Forms on Surfaces
10
4.3
Divisors
4.4
The canonical class . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
4.5
Numerical Invariants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
4.6
Intersection Number
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
4.7
Classical (and useful) results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
5 Introduction to K3 surfaces
14
1
Part I
Hodge Theory (Pierre Py)
Reference: Claire Voisin:
1
Hodge Theory and Complex Algebraic Geometry
Kähler manifold and Hodge decomposition
1.1
Introduction
Denition 1.1.
h:V ×V →C
Let
V
1. It is bilinear over
2.
C-linear
be a complex vector space of nite dimension,
h
is a
hermitian form
on
V.
If
such that
R
with respect to the rst argument
3. Anti-C-linear with respect to the second argument
i.e.,
h(λu, v) = λh(u, v)
4.
h(u, v) = h(v, u)
5.
h(u, u) > 0
Decompose
and
ω
h
if
and
h(u, λv) = λh(u, v)
u 6= 0
into real and imaginary parts,
h(u, v) = hu, vi − iω(u, v)
(where
hu, vi
is the real part
is the imaginary part)
Lemma 1.2.
h, i
is a scalar product on V , and ω is a simpletic form, i.e., skew-symmetric.
Note. − h , i determines ω
Proof.
By the property 4.
and conversely
h, i
is real symmetric and
ω
is skew-symmetric.
hu, ui = h(u, u) > 0
so
h, i
is
scalar product
u0 ∈ V such that ω(u0 , v) = 0∀v ∈ V . This equates to h(u0 , v) is real for all v . Also h(u0 , iv) is
real for all v , but h(u0 , iv) = −ih(u0 , v) ∈ = therefore, h(u0 , v) = 0. Hence u0 = 0, as h is non-degenerate.
So ω is non-degenerate.
2
Now we show − h , i determines ω : ω(u, v) = −=h(u, v) = =(i h(u, v)) = =(ih(iu, v)) = hiu, vi, so
ω(u, v) = hiu, vi.
Let
Lemma 1.3.
Proof.
Plug in
ω(u, iu) > 0
v = iu
Denition 1.4.
for all u 6= 0.
in the last part of the previous lemma.
We say that a skew-symmetric form on a complex vector space is
positive
above property (of lemma 1.3)
If
h(iu, iv) = h(u, v)
Exercise.
Prove that a
then
(
ω(iu, iv) = ω(u, v)
hiu, ivi = hu, vi
2-form
on
ω
on
V
satisfy
(∗)
(∗)
2
if and only if it is of type
(1, 1)
if it has the
C-vector
Pspace of dimC V = n = 2k . Let
Pz1 , . . . , zn be coordinates
P on V and e1 , . . . , en be
a basis such that v =
zi ei 7→ zj and dzj :
zi ei 7→ zj for 1 ≤ j ≤ n.
i zi ei for v ∈ V . Dene dzj :
Then dz1 , . . . , dzn , dz 1 , . . . , dzn ∈ HomR (V, C). We have dimR HomR (V, C) = 2 · 2n = 4n. If λ ∈ C
and φ ∈ HomR (V, C), dene λφ : v 7→ λφ(v). So HomR (V, C) can be viewed as a C-vector space, then
dimC HomR (V, C) = 2n.
Let
V
be a
Exercise.
Exercise.
dz1 , . . . , dzn , dz 1 , . . . , dzn
1. An element
where
2.
φ
is a basis for
HomR (V, C)
as a
space
φ ∈ HomR (V, C) is C-linear if and only if φ can be written as φ =
Pn
i=1 αi dzi
αi ∈ C.
is antiC-linear map if and only if
φ
can be written as
φ=
Pn
i=1 βi dzi where
Let I be the set of {i1 < · · · < ik }. dzI = dzi1 ∧ dzi2 ∧ · · · ∧ dzik
dzI = dzi1 ∧ dzi2 ∧ · · · ∧ dzik is a k -linear alternating form V to C
Denition 1.5. A k-form α on V
dzJ
C-vector
λI,J ∈ C.
Any k -form α
is a
k -linear
βi ∈ C.
alternating form
C), is of type (p, q), with p+q = k if α =
(with values in
V
P
|I|=p,|J|=q
to
C.
λI,J dzI ∧
for
Example.
k=1
k=2
Let
V
(p, q)
is a sum of forms of type
be of dimension
for
(0, 1)-forms
are anti-C-linear maps from
(2, 0)-forms
are
maps from
are
Then
α=
P
p+q=k
αp,q
V →C
dz1 ∧ dz2
forms are spanned by
(0, 2)-forms
p + q = k.
V →C
are
(1, 1)
and
2
(1, 0)-forms
C-linear
0 ≤ p, q ≤ k
dzi ∧ dzj
for
i, j ∈ {1, 2}
dz1 ∧ dz2
Exercise. The type of a form does not depend on the choice of basis.
Example. Let V = Cn , zi = xi + iyi then
dz1 + dz1
∧ dz2
2
dz1 ∧ dz2 dz1 ∧ dz2
+
=
2 } | {z
2 }
| {z
dx1 ∧ dz2 =
(2,0)−form
Example.
If
X
is a complex surface,
z1 , z2
(1,1)−form
are local coordinate on
X,
then a
2-form
is a combination
• dz1 ∧ dz2 a (2, 0)-form
dz1 ∧ dz2
dz ∧ dz
1
1
•
are (1, 1)-forms
dz2 ∧ dz2
dz ∧ dz
2
1
• dz1 ∧ dz2
Summary:
Conversely if a
a
(0, 2)-form
If h
(1, 1)
is a hermitian form,
ω = −=h is a (1, 1)-form and is positive (i.e, ω(u, iu) > 0).
ω = −=h for some hermitian form h.
form is positive it arises as
3
1.2
Let
Hermitian and Kähler metric on Complex Manifolds
M
be a complex manifold.
Convention: Each tangent space of
endomorphism
Jx : Tx M → Tx M
Denition 1.6.
Tx M
and
hx
is
A
C∞
hermitian metric
on
space and write
J
(or
Jx )
for the
on
M
is the following. For each
x ∈ M , hx
is a hermitian metric on
M.
So as before we can write
on
M , Tx M is a complex vector
v 7→ iv . (J 2 = − id)
dened by
h = h , i − iω .
The
h, i
is a Riemannian metric on
M
and
ω
is a
(1, 1)
form
M
Denition 1.7.
Example.
Why?
We say
h
is Kähler if
ω
is closed, i.e.,
dω = 0.
• If dimC M = 1, that is M is a Riemann surface, then any hermitian metric
dω by denition is a 3-form on a 2-dimension R-manifold, so it must be zero.
is Kähler.:
• ∂, ∂ operators: If f : M → C is a function. df is a 1-form and dfx : Tx M → C. We can decompose as
dfx = ∂fx +
∂fx . So df = ∂f + ∂f . ∂ and ∂ extend to operators from Ωk → Ωk+1 (where
|{z}
|{z}
C−linear
Ωk
is the
C−antilinear
C-value k -forms)
dened by
∂(α ∧ β) = ∂α ∧ β + (−1)|α| α ∧ ∂β
∂(α ∧ β) = ∂α ∧ β + (−1)|α| α ∧ ∂β
Exercise.
• M = PnC :
α is a (p, q)-form (it is of type (p, q) at each point), then dα is the
(p, q + 1) form: ∂ is the (p + 1, q) form and ∂ is the (p, q + 1)piece
If
form and a
sum of a
(p + 1, q)
M ) (1, 1)-form (it must be
1
ω[z] = 2πi
∂∂ log(||z||2 ). Check that it is
∗
if f : U → C is holomorphic, check that
We dene a close positive (that is positive on each point on
the imaginary part of a hermitian metric) is dened by
well dened, (does not dene on the ane piece): hint:
∂∂ log |f |2 = 0.
•
If
T = Cn /Λ, Λ
•
If
(M, h)
ω|Σ
a lattice of
is Kähler, and
Cn ,
Σ⊂M
then any constant coecient metric is Kähler.
is a
C-submanifold.
Then
(Σ, h|Σ )
is Kähler. As
d(ω|Σ ) = dω|Σ ⇒
is closed.
Lemma 1.8. Let M be a complex
manifold of C-dimension n with hermitian metric h. The Riemannian
ωn
volume form of h , i is equal to n! .
(If
V
is
C-vector
space with
C-basis e1 , . . . , en
then
e1 , Je1 , e2 , Je2 , . . . , en , Jen
is a positive real basis.
That is it has a canonical basis)
Corollary 1.9. Let M be a closed complex manifold, i.e., compact with no boundary. Then ∀k ∈ {1, . . . n},
ωk = ω
· · ∧ ω} is closed and non-zero in cohomology, i.e., ω is not exact.
| ∧ ·{z
k times
k
n
k
n−k = dα ∧ ω n−k = d(α ∧ ω n−k ). Hence by Stoke's theorem
some α, then ω = ω ∧ ω
´Proof.n If ω = dα
´ for
ωn
M ω = 0, but M n! = Vol(M ) > 0, hence contradiction.
4
So
2n (M, R) 6= 0
HDR
Corollary 1.10. If M is compact, Kähler and Σp ⊂ M n closed C-submanifold, then the homology class
[Σ] ∈ H2p (M ), the fundamental class of Σ, is non-zero.
Proof. 0 <
Exercise.
that
φh
1.3
´
ωp
Σ p!
If
X
= Volh Σ,
then
Σ
is not homologeous to
is a compact manifold and
is Kähler if and only if
φ
dimC X ≥ 2
0.
and
h
a Kähler metric, and
φ : X → R∗+ .
Prove
is constant.
Characterisations of Kähler metrics
(M, h) be a complex manifold with hermitian
<(h) = h , i which is a Riemannian metric.
Let
metric. Recall that
∇
is the Levi-Civita connection of
Theorem 1.11. The following are equivalent:
1. h is Kähler
2. For any vector eld X on U ⊂ M (open set) then ∇(JX) = J(∇X)
Proof. 2. ⇒ 1.
By denition of Levi-Civita connection
d hX1 , X2 i = h∇X1 , X2 i + hX1 , ∇X2 i,
dω(X1 , x2 ) = d hJX1 , X2 i
= h∇JX1 , X2 i + hJX1 , X2 i
= hJ∇X1 , X2 i + hJX1 , X2 i
so
dω(X1 , X2 ) = ω(∇X1 , X2 ) + ω(X1 , ∇X2 ) (∗).
dω(X0 , X1 , X2 ) = X0 ·ω(X1 , X2 )−X1 ·ω(X0 , X1 )+X2 ·ω(X0 , X1 )−ω([X0 , X1 ], X2 )+ω(X0 , [X1 , X2 ])+ω([X0 , X
Use
1. ⇒ 2.
1.4
(∗)
and
∇X Y − ∇Y X = [X, Y ]
to show that
dω(X1 , X2 , X3 ) = 0
Not done
The Hodge decomposition
We want to construct a decomposition of the de Rham cohomology group
K (M, C) (C-valued dierential
HDR
forms) of a compact Kähler manifold.
If
p + q = k,
H p,q (M ) ⊂ H k (M ) by H p,q (M ) =subspaces of class [α] such that α can be
form of type (p, q), i.e., there exists β of type (p, q) closed such that α − β is exact
we dene
represented by a closed
Our goal:
Theorem 1.12. If M is compact
Kähler, then H k (M ) = ⊕p+q=k H p,q (M ). If α is a closed form (on a
P p,q
complex manifold) and if α = α is its decomposition. A priori, the αp,q need not be closed
Example.
X = (C2 \ {0})/(v 7→ 21 v).
Then
H 1 (X) 6= 0
5
but
H 1,0 (X)
and
H 0,1 (X)
are zero.
Hodge Theory:
Let
(M, h , i
be Riemannian manifold
M , if e1 , . . . , en is a orthonormal R-basis of TX M ,
e∗1 , . . . , e∗n the dual basis (using h , i on M ) and for each multi-index {i1 < · · · < iR } = I , let e∗I =
e∗i1 ∧ · · · ∧ e∗iR . then {e∗I }I forms a basis of ΛR (Tx M )∗ (the space of k forms on Tx M ).
∗
k
∗
We declare that {eI }I is orthonormal. This denes a scalar product on Λ (Tx M ) (depending only on
h , i). We still denote it as h , i. If α, β are k -forms on M we dene
ˆ
hαx , βx i Vol
hα, βiL2 =
We need some norms on the space of forms on
M
Hodge Star Operator
(
∗ : Λk (T M )∗ → Λp−k (T M )∗
Let dimR M = p.
∗2 = (−1)k(p−k)
. Fix
x ∈ M , because h , i exists on Λk (Tx M )∗
we have
the following diagram
Λk (Tx M )∗
∼
(Λk (Tx M )∗ )∗
∗
'
∼
Λp−q (Tx M ∗ )
if
β
is a
(p − k)-form
and
α
a
k -form
with
α 7→ (α ∧ β)/Vol
then
hα, βi Vol = α ∧ ∗β
d : Λk → Λk+1 , we want to construct the adjoint d∗ of d
k
k−1 then hα, d∗ (β)i
such that α ∈ Λ , β ∈ Λ
L2 = hdα, βiL2
Claim.
for
h , iL2 .
That is we want
d∗ on Λk by d∗ = (−1)k ∗−1 d∗ then it works.
´
(−1)k α ∧ d ∗ β ,
´Proof. (∂α, β)L2 =k ´ M dα ∧ ∗β . d(α ∧ ∗β) = dα ∧ ∗β +
∗
M dα ∧ ∗β + (−1)
M α ∧ d ∗ β = · · · = hdα, βiL2 − hα, d βiL2
If we dene
Denition 1.13.
The
Denition 1.14.
A
Lemma 1.15.
Proof.
d∗ : Λk → Λk−1
Laplacian ∆ : Λk → Λk
k -form α
is
harmonic
if
is dened by
so by Stoke's theorem
0 =
∆ = dd∗ + d∗ d
∆α = 0
h∆α, αi = |dα|2L2 + |d∗ α|2L2 = hdα, dαiL2 + hd∗ α, d∗ αiL2
and h∆α, βi = hα, ∆βi
Exercise (formal)
Corollary 1.16.
∆α = 0
if and only if dα = 0 and d∗ α = 0, i.e., harmonic forms are closed.
Theorem 1.17. Any smooth k-form α on M can be written as a sum of a harmonic one plus the Laplacian
of another form
The theorem says that for any
So we have a map Harmonic
α,
α0 harmonic and
k
HDR (M )
there exists
k -forms→
β
a
k -form
such that
α = α0 + ∆β
Corollary 1.18. Any de Rham cohomology class can be represented by a unique harmonic form H k (M ) ∼
=
ker(∆ : Λk → Λk )
6
Proof.
∗
∗
Let α be a closed k -form. Write α = α0 + ∆β , α0 -harmonic. So α = α0 + dd β + d dβ and since α0
∗
∗
∗
∗
∗
∗
and dd β are both closed we have d dβ is also closed. 0 = hdd dβ, dβiL2 = hd dβ, d dβiL2 = ||d dβ|| = 0,
∗
∗
so d dβ = 0. Hence α − α0 = d(d β) is exact. Hence [α] = [α0 ] so [α] is represented by a harmonic form.
We want to show that if
d∗ α0 = 0.
So
d∗ dγ = 0,
α0 is harmonic and [α0 ] = 0 then α0 = 0. Let α0 = dγ ,
hd∗ dγ, γiL2 = 0 = ||dγ||2L2 , so dγ = α0 = 0
then
0 = ∆α0
implies
hence
We assume now that
M
is Kähler,
h , i = <(h)
and
h
is a Kähler metric.
Theorem 1.19. In this case the Laplacian preserved the type of forms, that is ∆(Ap,q ) ⊂ Ap,q where Ap,q
is the space of (p + q)-forms of type (p, q)
Corollary 1.20. The Hodge decomposition exists
P p,q
P
Proof. α is harmonic so ∆α = 0. Write α P
=
α so ∆α =
∆αp,q . So ∆αp,q = 0, hence ∆αp,q are
harmonic, thence they are closed. So
[αp,q ],
[α] =
therefore the
H p,q
span
H k (M, C)
Check that this is a direct sum.
2
Ricci Curvature and Yau's Theorem
Let
(M, h , i
be a Riemannian manifold,
Curvature tensor of
Let
X, Y, Z
∇
the Levi-Civiti connection
M
be vector elds on open set of
M.
∇Y (∇X Z) − ∇X (∇Y Z) − ∇[X,Y ] Z (∗)
Exercise. In Euclidean space, X, Y, Z : U → Rm , ∇Z = dZ , then (∗) = 0
Fact. (∗) is a tensor: The value of (∗) at x ∈ M depends only on X(x), Y (x), Z(x), this means that
(∗) = R(X, Y )(Z) where R(X, Y ) is the endomorphism of Tx M . We call R the curvature tensor. It is a
bilinear map Tx M × Tx → End(Tx M )
1. R(X, Y ) = −R(Y, X)
2. R(X, Y ) is skew-symmetric for h , i, i.e., hR(X, Y )(Z), T i = − hZ, R(X, Y )(T )i
Part 1. tells us we can think of R as 2-form with values in the space of symmetric endomorphism of
× p(p−1)
.
Tx M . If p = dimR M then skew-sym(Tx M ) has dimension p(p−1)
2
2
The Ricci tensor of M will be (on each point x ∈ M ) a symmetric bilinear from on Tx M . If X, Y
are tangent vectors Ricci(X, Y ) := Tr(R(X, −), (Y )) (i.e., Tr(Z 7→ R(X, Z)(Y ))
3. hR(X, Y )(Z), T i = hR(Z, T )(X), (Y )i
Lemma 2.1. Ricci is symmetric
Proof. Let e1 , . . . , ep be orthonormal basis of Tx M .
Ricci(X, Y
Then
) =
X
=
X
hR(X, ei )(Y ), ei i
i
hR(Y, ei )(X), ei i
i
=
Ricci(Y, X)
7
Next we assume
Exercise.
M
Prove that
is Kähler.
R(JX, JY ) = R(X, Y )
(use the fact that
∇JX = J∇X ),
i.e., that
R
is of type
(1,1)
Let
h = h , i − iω
be a Hermitian metric. We transform Ricci (a symmetric object) into something
skew-symmetric
Denition 2.2.
The Ricci form of the Kähler metric is
Proposition 2.3.
Proof. γω
is a
γω
γω (X, Y ) = Ricci(JX, Y )
is skew-symmetric and a (1, 1)-form
(1, 1)-form
because
γω (JX, JY ) = γω (X, Y )
γω (Y, X) =
=
Ricci(JY, X)
Ricci(−Y, JX)
= −γω (X, Y )
How to relate
γω
to the
1st
Chern Class of
M?
st
2
We will dene the 1 Chern Class of a holomorphic line bundle L → M . c1 (L) ∈ H (M, R) (actually
2
2
c1 (L) lives in H (M, Z), we simply look at its image in H (M, R)). Let h be a hermitian metric on L. If
1
s is a local holomorphic section without zeroes on some open set U , we dene Ω = 2πi
∂∂ log h(s, s)
1.
Ω does not depend on s, (i.e., ∂∂ log h(s1 , s1 ) = ∂∂ log h(s2 , s2 ) is s1
on U )
2.
Ω
and
s2
are two non-zero sections
is globally dened
3. The cohomology class of
h0 = f h
for
Ω
does not depend on
h
(any other hermitian metric on
L
is of the form
1
f > 0, Ω0 = Ω +
∂∂ log f 2 )
2πi
|
{z
}
is exact
c1 (L) to be the class of Ω. Now if
p
bundle Λ T M → M (where p = dimC M )
We dene
M
is a complex manifold its
1st
Chern Class is that of the
Exercise.
n
Let L → PC be the tautological line bundle. L can be endowed with the restriction of the
n+1
metric C
. Compute Ω as given above, you should nd the negative of the example of Kähler metric of
n
CP given earlier.
On a Kähler manifold
R(X, Y )
is
C-linear,
hence skew hermitian.
Proposition 2.4.
Corollary 2.5.
γω (X, Y ) = −i TrC R(X, Y )
γω is closed γ2πω = −c1 (M )
ω be a Kähler form on V . Any (1, 1)-form α on V can be written as α = λv + β (λ ∈ R
β satises β ∧ ω n−1 = 0. (If β satises this we say that β is primitive )
Let
where
8
or
C),
Corollary 2.6. Let (M, h) be Kähler. Then h , i has zero
to saying R is primitive 2-form).
If
(M, h)
is Kähler and if
Theorem 2.7
(Calabi-Yau)
h0 = h , i − iω0
such that
and cohomologeous to ω.
3
then
γω
curvature ⇐⇒ R ∧ ωn = 0 (equivalent
is cohomologeous to zeroes.
( . If (M, ω) is Kähler, c1 (M ) = 0, then there exists a unique Kähler metric
[ω0 ] = [ω]
. In other words, there is a unique metric with 0 Ricci curvature
γω0 = 0
Hodge Structure
M
Let
p,q
(M ∼
= Zl )
be a nitely generated free module
Denition 3.1.
V
c1 (M ) = 0,
Ricci
=V
A
Hodge structure of weight k on M
is a decomposition
M ⊗Z C = ⊕p+q=k V p,q
such that
q,p
Remark.
• M ⊗ C = M ⊗ R + iM ⊗ R,
so we have an involution
a + ib 7→ a − ib this is the conjugation
which appears in the denition.
•
In general we assume
Example.
V p,q = 0
if
p<0
or
q<0
(M, h) is compact Kähler, H k ∗ M, Z)/Torsion has a weight k Hodge structure.
k
k
k
of H (X, Z)/Tor is H (X, C) and we have the decomposition on H (X, C)
If
plexication
Denition 3.2.
A
polarization for a Hodge structure of weight k on M
is a bilinear form
The com-
Q : M ×M → Z
which is
k
1. Symmetric for
even and skew-symmetric for
2.
QC M ⊗ C × M ⊗ C → C
3.
α ∈ V p,q \ {0}, (−1)
Example.
satises
k
QC (α, β) = 0
odd
if
0
α ∈ V p,q , β ∈ V p ,q
0
and
p 6= p0
k(k−1)
2
(−1)q ik Q(α, α) > 0
´
M = H k (X, Z)/Tor, Q(α, β) = X ω n−k ∧ α ∧ β
(is integral value since
[ω]
is integral). This
satisfy 1. and 2. but not 3. in general
Proposition 3.3. A weight 1 Hodge structure is the same thing as a complex torus (a polarised weight 1
Hodge structure is the same thing as an Abelian Variety)
Proof. M = Zk , M ⊗ C = A ⊕ A.
Consider
π : M ⊗ C → A is injective
A/π(Zk ) is the complex torus.
The projection
in
A).
If
Then
X
is a K3 surface, we will see that
of dimension
1, 20, 1
v ∈ M , then its decomposition must be (a, a) (since v is real).
k
k
k
on Z . π(Z ) ⊂ A (exercise: π(Z ) is discrete, so its a lattice
M = H 2 (X, Z) is isomorphic to Z22 , H 2 (X, Z) = H 2,0 +H 1,1 +H 0,2
respectively.
Lemma 3.4. If M and the intersection form are given, then the Hodge structure is determined by H 2,0 .
In particular, for a K3 surface the Hodge
structure is determined by a point in P21 ⊂ P(H 2 (X, C)). This
´
points lives in the quadric dened by X α ∧ α = 0
Exercise.
If
β
is a
(1, 1)-form
then
β∧β
is semi-positive.
9
Part II
Introduction to Complex Surfaces and K3 Surfaces
(Gianluca Pacienza)
References:
Compact Complex Surfaces
Beauville: Surfaces algebriques Complexes
Miranda: An overview of algebraic surfaces ( Free on the internet)
*: Geometry des surfaces K3
Barth,Peters, Vand De Ven:
4
Introduction to Surfaces
We assume
4.1
X
is Kähler for this whole part
Surfaces
Denition 4.1.
A
compact complex surface (or more simply a surface) X is compact, connected, complex
manifold of
dimC X = 2
Example.
F ∈ C[x0 , . . . , x3 ]
X := {F = 0} ⊂ P3
homogeneous.
(of course
F =
∂F
∂x0
= ··· =
∂F
∂x3
=0
has
no solutions)
F1 , . . . , Fn−2 ∈ C[x0 , . . . , xn ] homogeneous polynomial of degree d1 , . . . , dn−2 such
∂Fi
of multiple degree
∂xj (p) i,j has maximal rank at each p ∈ X . (X is called
More generally if
that
complete intersection
(d1 , . . . , dn−2 ))
P
Note. If di = n + 1
Denition 4.2.
then
X
A surface is called
1.
∀p 6= q ∈ X , ∃f ∈ M (X)
2.
∀p ∈ X , ∃f, g ∈ M (X)
Example.
on
2.
X ⊂ Pn
Pn restricted to X
1. If
T = C2 /Λ
is a K3 surface
algebraic
such that
such that
if its eld
M (X)
of meromorphic function satises
f (p) 6= f (q)
(f, g)
gives local coordinates of
X
at
is a surface then it is algebraic, since the ratios
satises
a complex torus of
1
and
dim 2.
2
p.
xi
xj of homogeneous coordinates
(of Denition 4.2)
A random choice of
Λ
will lead to a non-algebraic surface
3. We will see that a random K3 surfaces is non-algebraic.
4.2
Forms on Surfaces
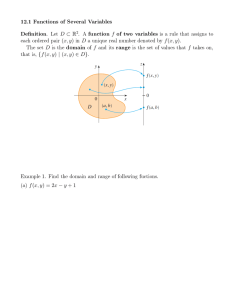
Denition 4.3.
A
dierentiable 1-form
(or
C ∞) ω
on a surface
X
is locally an expression:
f1 (z, w)dz + f2 (z, w)dz + g1 (z, w)dw + g2 (z, w)dw
where
(z, w)
are local coordinates and
fi , gi
are
C∞
functions (plus patching conditions)
10
Remark.
(1, 0)
(0, 1)
Since coordinate change preserves
type:
type:
∂z, ∂z, ∂w, ∂w
the type is well dened:
f dz + gdw
f dz + gdw
Denition 4.4. (n = 1, 2, 3, 4) A C ∞ n-form ω on a surface X is locally a linear combination of expressions
f (z, z, w, w)dα1 ∧ · · · ∧ dαn with dαi ∈ {dz, dz, dw, dw)
dαi ∧ dαi = 0 and antisymmetric) (plus combability conditions)
A type (p, q) means p-times dz or dw and q -time dz or dw
of the form
Denition 4.5.
A
and
f ∈ C∞
(with the usual rule
holomorphic (and respectively meromorphic ) n-form is an n-form of type (n, 0) whose
coecients are holomorphic (respectively meromorphic) functions.
Example.
4.3
T = C2 /Λ.
If
z1 , z2
are coordinates on
C
then
dz1 , dz2 , dz1 , dz2
descend to the quotient
Divisors
Denition 4.6.
n
i.e.,
D↔
fi
gi
A
divisor
o
i∈I
fi , gi
D=
P
mi ∈Z mi Yi ,
local holomorphic function on
Ui
Yi ⊂ X
such that
a codimension
(fi /gi )/(fj /gj )
1
subvarieties.
has no zeroes or
fi ) − (zeroes of gi ) (all counted with multiplicities)
P
P
P
Divisors form an abelian group Div(X), D =
im
n o
n o
ni Yi , Eo = i ni Yi then D + E = i (ni + mi )Yi ,
fi
fi α i
αi
equivalently if D =
and E =
gi
βi then D + E = gi βi .
poles on
Ui ∩ Uj 6= ∅.
,
is a nite formal sum
Hence locally
D =(zeroes
of
Denition 4.7. If D is dened globally by zeroes and poles of a meromorphic function f
is called principal
∈ M (X)
then
D
Prime(X)
=Subgroup
Denition 4.8.
of principal divisors
≤ Div(X)
Pic(X)
:= Div(X)/Prime(X).
Equivalently: We say D1 , D2 ∈ Div(X) are linearly equivalent if ∃f ∈ M (X) such that D1 − D2 =
div(f ). We use the notation, D1 ∼ D2 . So we get a group Div(X)/ ∼.
(Which we will avoid calling it Pic(X), as it is abusive language if X is not algebraic.)
n o
Denition 4.9. If F : X → Y is a morphism of manifolds and D = fgii ∈ Div(Y ) then the pull-back of
n
o
◦F
D is F ∗ D = fgii ◦F
The exponential sequence
We have the exact sequence
0
where
OX
/Z
/ OX exp / O ∗
X
is the sheaf of holomorphic functions on
functions on
X
and
∗
OX
/0
is the sheaf of non-vanishing holomorphic
X.
by taking the long exact sequence in cohomology we get
0
where
∗ )
H 1 (X, OX
/ H 1 (X, Z)
represents
{line
/ H 1 (X, OX )
bundles on
X}/isom.
11
/ H 1 (X, O ∗ ) c1
X
/ H 2 (X, Z)
Fact.
H p,q (X) = H q (X, ΩpX ),
where ΩpX is the sheaf of p-forms which are holomorphic.
∗ ) → N S(X) → 0, where T is the complex torus
H 1 (X, OX ) = H 0,1 . So 0 → T → H 1 (X, OX
0,1 = H 1 (X, O )/H 1 (X, Z) and N S(X) is the image of c map insider H 2 (X, Z) called
of dimension H
1
X
Neron-Severi group of X , and its rank (as a Z-module) is called the Picard number of X . It is denoted
ρ(X).
Hence
4.4
The canonical class
X
Let
be a surface and
ω
on
X.
Locally
(associated to
ω)
is
be a meromorphic
2-form
ω = fg dz ∧ dw
where
f
and
g
are local
holomorphic functions
Denition 4.10.
The
canonical divisor
KX =
n o
f
g
=
number of zeroes and poles of
ω.
Exercise.
Check that if
ω1 , ω2
are two meromorphic
2-forms
on
X
f ∈ M (X)
then there exists
such that
ω1 = f · ω2 .
The above exercise implies that the canonical divisors associated to
Hence
KX
denes a unique class in Div(X)/
Denition 4.11.
Given
D ∈
Div(X), set
space of meromorphic functions with poles
Exercise.
2-forms
(Important)
(Note:
ω2
canonical class
H 0 (X, OX (D)) := {f ∈ M (X) :
bounded by D .
are linearly equivalent.
of
X
div(f )
≥ −D} = C-vector
∼
X
is
pg (X) = dimC H 0 (X, KX )
.
More generally the
φD : X 99K Pn dened by x 7→ [f0 (x) : · · · : fn (x)]
x or one of the fi has a pole at x)
at
X be a surface. Suppose H 0 (X, nKX ) 6= 0 for some n > 0. The Kodaira
of X is kod(X) := maxm>0 dim im(φmKX ) (if possible) otherwise set kod(X) = −∞. (So
{−∞, 0, 1, 2}
If X is
1
∼
−∞ X = P
0
pg (X) = 1
1
pg (X) ≥ 2
n-th
dene
Let
Example.
space of
The plurigenus are bimeromorphic invariants of X
hf0 , . . . , fn i = H 0 (X, OX (D)). Let's
not dened where, either all fi vanish
Denition 4.13.
and
H 0 (X, OX (KX )) =: H 0 (X, KX ) → H 2,0 (X) = H 2 (X, Ω2 X) = C-vector
on X
Denition 4.12. The genus of a surface
plurigenus of X is dimC H 0 (X, nKX )
Let
This class is the
Show that
holomorphic
Fact.
∼.
ω1
dimension
kod(X)
∈
a compact Riemann Sphere, the Riemann-Roch theorem tells us that kod(X)
=
The Enriques-Kodaira classications of surfaces consist of describing surfaces according to their
Kodaira dimension
Example.
kod
= −∞
In each class:
Any complete intersection
X(d1 ,...,dn−2 ) ⊂ Pn
12
with
P
di < n + 1
kod
=0
(with
with
P
di = n + 1.
You can also take a Torus
dimC T = 2)
kod
=2
Any complete intersection
kod
=1
A surface
4.5
X(d1 ,...,dn−2 ) ⊂ Pn
Any complete intersection
X(d1 ,...,dn−2 ) ⊂ Pn
such that
P
di > n + 1
X bered over a genus ≥ 2 curve B with bers isomorphic to curves of genus 1. (e.g.
B ∈ k[x0 , x1 , x2 ] homomorphic, deg B = 3, K = M (B), g(B) ≥ 2, then X = {B 0 = 0} ⊂ P2K )
Numerical Invariants
bi := rk H i (X, Z) = dimR H i (X, R) = dimC H i (X, C) = ith
P
e := (−1)i bi
Betti Numbers:
Euler Number
Hodge numbers
They satisfy
Betti number of
X
hp,q := dimC H p,q = dimC H q (X, ΩqX )
hp,q = hq,p = h2−p,2−q = h2−q,2−p
and
bk =
P
p+q=k
hp,q
(Hodge decomposition). This gives
the Hodge diamond
h2,2
h2,1
⇒
1
q
h1,2
h2,0
h1,1
h1,0
h0,2
q
h1,1
pg
h0,1
q
q
1
h0,0
irregularity
where
q
4.6
Intersection Number
is called the
of
X.
pg
Note that
e = 2 + 2pg + h1,1 − 4g
P C1 , C2 ⊂ X be two irreducible curves. We want to dene C1 · C2 . If C1 6= C2 ,
p∈C1 ∩C2 (C1 · C2 )p where (C1 · C2 )p = dim OX,p /(f1 , f2 ) with Ci = {fi = 0} (locally)
Let
Exercise.
Check that
#points
C1 ∩ C2
If
in
(C1 · C2 )p = 1 if C1
and
C2
are smooth at
set
p are intersect transversely,
C1 · C2 =
i.e.
C1 · C2 =
counted with the right multiplicities (as usual)
C1 = C2 = C .
If
C
is smooth,
C 2 := deg(NC/X ),
the normal bundle of
C
in
X.
For the general
denition look at references.
4.7
Classical (and useful) results
Thom-Hirzebruch index theorem The index (number of positive eigenvalues minus number of negative
eigenvalues) of the intersection product on
Hodge index theorem The intersection product on
Noether's formula
2 +e
12χ(OX ) = KX
is equal to
H 1,1 ∩ H 2 (X)
2 −2e
KX
3
has signature
(1, h1,1 − 1)
χ(OX ) = h0 (OX ) − h1 (OX ) + h2 (OX )
D ∈ Div(X), χ (OX (D)) =
L = OX (D) in our case
Riemann Roch Let
and
where
H 2 (X)
D·(D−KX )
2
13
+ χ(OX )
where
χ(L) = h0 (L) − h1 (L) + h2 (L)
Genus formula Let
C⊂X
is the arithmetic genus (and is equal to the
Freedman
5
2pa (C)−2 = (C +KX )·C where pa (C) = h1 (OC )
topological genus of C if C is smooth)
be an irreducible curve, then
X1 , C2 simply connected surface.
H 2 (X2 , Z) (isometrically)
We haveX1
∼
= X2
(homorphically) if and only if
H 2 (X1 , Z) ∼
=
Introduction to K3 surfaces
Denition 5.1.
X
A surface
is a K3 surface if
KX = 0
and
b1 (X) = 0
Theorem 5.2. A K3 surface is always Kähler
Remark.
Since
b1 (X) = 2q
Noether formula reads
Exercise.
Let
X
an equivalent denition is
12 · (2 − 0) = 0 + e,
be a K3 surface. Prove that
A consequence of exercise is that
that is
KX = 0
and
h1 (OX ) = 0
24 = e = 2 + 2 + h1,1 − 0,
hence
h1,1 = 20
TX ∼
= Ω1X
dimC H 1 (X, TX ) = 20
We have that the Hodge diamond of a K3 surface is
1
0
1
0
20
0
1
0
1
Fact.
H1 (K3, Z)
has no torsion
Corollary 5.3. Let X be a K3 surface.
Proof. H1 (X, Z) ⊗ R = 0
we have that the
b2 (X) = 22,
then
H1 (X, Z) = 0
and H2 (X, Z) is a torsion free Z-module of rank 22
b1 = 0) so H1 (X, Z) = 0. By general properties of algebraic topology,
torsion of H2 (X, Z) is isomorphic to the torsion of H1 (X, Z). Hence no torsion. Since
H2 (X, Z) is a torsion free Z-module of rank 22
A closer look to
(since
H 2 (X, Z)
• H 2 (X, Z) is endowed
(C + 0) · C = C 2 )
with the intersection form, which is even by the genus formula (2pa (C)
•
The intersection form is indenite (since, by Thon-Hizebucj, the index is
•
The intersection form is unimodular (its determinant is
±1)
−2=
−16)
by Poincaré duality
Now we have the following:
Fact. An indenite, unimodular lattice is uniquely determined (up to isometry) by its rank, index and
parity (i.e., even or not)
Conclusion:
H 2 (K3, Z) = H ⊕3 ⊕ (−E8 )⊕2
where
14
• H
is a rank
2 Z-module
• E8 = Ze1 ⊕ · · · ⊕ Ze8
with form given
a rank
8 Z-module
e1
0 1
1 0
(Hyperbolic plane)
with the following Dykin diagram
e2
•
e3
•
e4
•
•
e5
e6
•
•
e7
•
e1
•
and
i=j
2
(ei , ej ) = −1 d(ei , ej ) = 1 (d(ei , ej )
0
else
H ⊕3 ⊕ (−E8 )⊕2
(Check that
Note.
The sign on
H2
We conclude with
is
3
is given by the diagram)
has the same rank, index and parity as
(3, 19)
while the sign on
H 1,1 ∩ H 2
is
H 2 (K3, Z))
(1, 19)
classes of examples of K3
Pn .
n
X
P = X(d1 ,...,dn−2 )P a complete intersection with surface of
multidegree (d1 , . . . , dn−2 ) such that
di = n + 1. By applying (n − 2) times the adjunction
formula, we nd KX = 0. By applying (n − 2) time the Lefschetz hyperplane theorem, we see
∼
H 1 (X, Z) → H 1 (Pn , Z) = 0. So X is a K3 surface (for example X4 ⊂ P3 , X2,3 ⊂ P4 , X2,2,2 ⊂ P5 , . . . )
1. Complete intersections in
Parameter counts: (for
4
degree
4×4
Take
X4 ⊂ P3 )
We have
homogeneous polynomials in
4
35
parameters (the complex dimension of the space of
variable) minus
invertible matrices). Hence a total of
19
16
parameters (the complex dimension of
parameters.
branched along
C = C6 ⊂ P2 a smooth
π
C , X → P2 (c.f. [BPHVdV]).
Theorem 5.4.
KX = π ∗ (KP2 )+Ramication = π ∗ (−3H + 21 C) ∼ π ∗ (−3H + 26 H) = 0
sextic plane curve. LetX be the double cover of
2. Double Planes: Take
One also computes that
Parameter count:
polynomial in
acting on
P2 )
3
28
b1 (X) = 0,
19
X
is a K3 surface
parameters (the complex dimension of the space of homogeneous degree
variable) minus
then
so
P2
9
parameters (the complex dimension of invertible
3×3
6
matrices
parameters.
3. Kummer Surfaces:
Let
A
be a complex torus of
identify each point of
A
dimC 2.
We have an involution
ι : A → A, a 7→ −a.
Consider
A/ι
(i.e
with its opposite)
Bad News:
A/ι has 16 singulars points (corresponding to the 16 xed points of ι) which are exactly
the 16 points of order 2 on A
Good News: We can get rid of them by Blowing up. Let : Ae → A/ι be the blow up at these 16
points.
e
:A
/A
e ι = A0 / A/ι
A/e
15
2 point ι : (α, β) 7→ (−α, −β), the invariants under ι are
∼
A/ι =
= Spec C[u, v, w]/(uv − w2 ). This shows that the singular
e→A
e is the extension of ι to A
e, then one sees that
points of A/ι are ordinary double points. If e
ι:A
e ι is
e
around the exceptional curves i : (x, y) 7→ (x, −y). The upshot is that the quotient X := A/e
Notice: That locally around an order
α2 , β 2 , αβ . So
Spec C[α2 , β 2 , αβ]
smooth.
X
is a K3 surface: The
2-form dα ∧ dβ
descend to the quotient, and then lifts to
A0 \{exceptional
0
curves}. One can check that it extend smoothly to A without zeroes. As why it has no irregularity
1,0
0
1
(h = h (ΩX )), there does not exists a 1 form on A which is invariant under the involution ι.
16