Conversations and collaborations: Gerard Ben Arous, Sigurd Assing, Stephen Connor,
advertisement

Coupling
Reflections
Exotica
Exotic Couplings of Brownian motion
X CLAPEM, Lima
Wilfrid Kendall
w.s.kendall@warwick.ac.uk
Department of Statistics, University of Warwick
Monday 26 February 2007
Conclusion
Coupling
Reflections
Exotica
Exotic Couplings of Brownian motion
X CLAPEM, Lima
Wilfrid Kendall
w.s.kendall@warwick.ac.uk
Department of Statistics, University of Warwick
Monday 26 February 2007
Conversations and collaborations:
Gerard Ben Arous, Sigurd Assing, Stephen Connor,
Mike Cranston, Terry Lyons, Catherine Price, Jon Warren.
Conclusion
Coupling
Reflections
Exotica
Plan of talk
Coupling
Coupling: maximal or co-adapted?
Coupling and Optimal Transport
Coupling and Stochastic Control
Conclusion
Coupling
Reflections
Exotica
Plan of talk
Coupling
Coupling: maximal or co-adapted?
Coupling and Optimal Transport
Coupling and Stochastic Control
Reflections
Brownian coupling
Diffusion coupling
Coupling Brownian motion on manifolds
Conclusion
Coupling
Reflections
Exotica
Plan of talk
Coupling
Coupling: maximal or co-adapted?
Coupling and Optimal Transport
Coupling and Stochastic Control
Reflections
Brownian coupling
Diffusion coupling
Coupling Brownian motion on manifolds
Exotica
Coupling real Brownian motion with time-integrals
Coupling planar BM and stochastic area
Coupling n-dimensional BM and all stochastic areas
Conclusion
Coupling
Reflections
Exotica
Conclusion
Probabilistic Coupling
Coupling
Coupling: maximal or co-adapted?
Coupling and Optimal Transport
Coupling and Stochastic Control
Reflections
Exotica
e ) builds them on
A coupling of two random processes (X and X
the same probability space, interdependent in a useful way:
e : Ω × [0, ∞) → Rn
X, X
(prescribed marginals).
Coupling
Reflections
Exotica
Some motivations
1
interacting particle systems
2
randomized algorithms
3
explicit approximation
(Stein-Chen)
4
rates of convergence in
MCMC
5
harmonic functions:
gradient estimates etc
6
simulation,
especially perfect simulation
7
de-randomizing
probabilistic constructions
Conclusion
Coupling
Reflections
Exotica
Coupling: maximal or co-adapted?
Coupling is used for many purposes, but the objective which
organizes much of the theory is,
Whether a coupling is successful?
Conclusion
Coupling
Reflections
Exotica
Conclusion
Coupling: maximal or co-adapted?
Coupling is used for many purposes, but the objective which
organizes much of the theory is,
Whether a coupling is successful?
Successful coupling:
h
i
et for all large enough t
P Xt = X
=
1.
Coupling
Reflections
Exotica
Conclusion
Coupling: maximal or co-adapted?
Coupling is used for many purposes, but the objective which
organizes much of the theory is,
Whether a coupling is successful?
Successful coupling:
h
i
et for all large enough t
P Xt = X
Choices:
maximal (eg: Pitman 1976)
=
1.
Coupling
Reflections
Exotica
Conclusion
Coupling: maximal or co-adapted?
Coupling is used for many purposes, but the objective which
organizes much of the theory is,
Whether a coupling is successful?
Successful coupling:
h
i
et for all large enough t
P Xt = X
=
Choices:
maximal (eg: Pitman 1976): potential theory;
1.
Coupling
Reflections
Exotica
Conclusion
Coupling: maximal or co-adapted?
Coupling is used for many purposes, but the objective which
organizes much of the theory is,
Whether a coupling is successful?
Successful coupling:
h
i
et for all large enough t
P Xt = X
=
1.
Choices:
maximal (eg: Pitman 1976): potential theory;
or co-adapted (prescriptions of marginals respect a
specific filtration)
Coupling
Reflections
Exotica
Conclusion
Coupling: maximal or co-adapted?
Coupling is used for many purposes, but the objective which
organizes much of the theory is,
Whether a coupling is successful?
Successful coupling:
h
i
et for all large enough t
P Xt = X
=
1.
Choices:
maximal (eg: Pitman 1976): potential theory;
or co-adapted (prescriptions of marginals respect a
specific filtration): often easier to work with;
Coupling
Reflections
Exotica
Conclusion
Coupling: maximal or co-adapted?
Coupling is used for many purposes, but the objective which
organizes much of the theory is,
Whether a coupling is successful?
Successful coupling:
h
i
et for all large enough t
P Xt = X
=
1.
Choices:
maximal (eg: Pitman 1976): potential theory;
or co-adapted (prescriptions of marginals respect a
specific filtration): often easier to work with;
other possibilities . . . .
Coupling
Reflections
Exotica
Doeblin’s coupling for Markov chains
(run independently till first meeting)
Doeblin (1938)’s construction:
Conclusion
Coupling
Reflections
Exotica
Doeblin’s coupling for Markov chains
(run independently till first meeting)
Doeblin (1938)’s construction:
if X is a finite-state-space Markov chain for which the
convergence theorem applies (irreducible, aperiodic);
Conclusion
Coupling
Reflections
Exotica
Doeblin’s coupling for Markov chains
(run independently till first meeting)
Doeblin (1938)’s construction:
if X is a finite-state-space Markov chain for which the
convergence theorem applies (irreducible, aperiodic);
e which move independently till
construct two copies X , X
they couple, and then move synchronously.
Conclusion
Coupling
Reflections
Exotica
Doeblin’s coupling for Markov chains
(run independently till first meeting)
Doeblin (1938)’s construction:
if X is a finite-state-space Markov chain for which the
convergence theorem applies (irreducible, aperiodic);
e which move independently till
construct two copies X , X
they couple, and then move synchronously.
e starts in equilibrium, then
If T is the coupling time, and X
the coupling inequality uses P [T > t] to estimate total
variation distance of L (Xt ) from equilibrium.
Conclusion
Coupling
Reflections
Exotica
Doeblin’s coupling for Markov chains
(run independently till first meeting)
Doeblin (1938)’s construction:
if X is a finite-state-space Markov chain for which the
convergence theorem applies (irreducible, aperiodic);
e which move independently till
construct two copies X , X
they couple, and then move synchronously.
e starts in equilibrium, then
If T is the coupling time, and X
the coupling inequality uses P [T > t] to estimate total
variation distance of L (Xt ) from equilibrium.
Clearly co-adapted.
Conclusion
Coupling
Reflections
Exotica
Doeblin’s coupling for Markov chains
(run independently till first meeting)
Doeblin (1938)’s construction:
if X is a finite-state-space Markov chain for which the
convergence theorem applies (irreducible, aperiodic);
e which move independently till
construct two copies X , X
they couple, and then move synchronously.
e starts in equilibrium, then
If T is the coupling time, and X
the coupling inequality uses P [T > t] to estimate total
variation distance of L (Xt ) from equilibrium.
Clearly co-adapted. Clearly inefficient.
Conclusion
Coupling
Reflections
Exotica
Doeblin’s coupling for Markov chains
(run independently till first meeting)
Doeblin (1938)’s construction:
if X is a finite-state-space Markov chain for which the
convergence theorem applies (irreducible, aperiodic);
e which move independently till
construct two copies X , X
they couple, and then move synchronously.
e starts in equilibrium, then
If T is the coupling time, and X
the coupling inequality uses P [T > t] to estimate total
variation distance of L (Xt ) from equilibrium.
Clearly co-adapted. Clearly inefficient.
We need to do much better for:
randomized algorithms, smart simulation,
gradient estimates . . . .
Conclusion
Coupling
Reflections
Exotica
Coupling and optimal transport
There is a significant relationship with optimal transport:
Conclusion
Coupling
Reflections
Exotica
Conclusion
Coupling and optimal transport
There is a significant relationship with optimal transport:
successful coupling solves a Monge-Kantorovich problem
e
MIN I L X , X
Z
=
e) π
e
c(X , X
e ) (d X , d X )
L(X ,X
subject to prescribed L (X ) , L (Y ) ,
Coupling
Reflections
Exotica
Conclusion
Coupling and optimal transport
There is a significant relationship with optimal transport:
successful coupling solves a Monge-Kantorovich problem
e
MIN I L X , X
Z
=
e) π
e
c(X , X
e ) (d X , d X )
L(X ,X
subject to prescribed L (X ) , L (Y ) ,
where
e)
c(X , X
=
h
i
et for all large t .
1 − P Xt = X
Coupling
Reflections
Exotica
Coupling and stochastic control
Similarly for stochastic control,
especially for co-adapted coupling:
Conclusion
Coupling
Reflections
Exotica
Coupling and stochastic control
Similarly for stochastic control,
especially for co-adapted coupling:
e is controlled by choice of J1 , J2 in
suppose X
dX
e
dX
=
=
σ(X ) d B + µ(X ) d t ,
e )J1 d B + µ(X
e , J2 ) d t ;
σ(X
Conclusion
Coupling
Reflections
Exotica
Coupling and stochastic control
Similarly for stochastic control,
especially for co-adapted coupling:
e is controlled by choice of J1 , J2 in
suppose X
dX
e
dX
=
=
σ(X ) d B + µ(X ) d t ,
e )J1 d B + µ(X
e , J2 ) d t ;
σ(X
then choose J1 , J2 to maximize
h
i
et for all large t .
P Xt = X
Conclusion
Coupling
Reflections
Exotica
Conclusion
Reflection couplings
Coupling
Reflections
Brownian coupling
Diffusion coupling
Coupling Brownian motion on manifolds
Exotica
Most classical couplings use the idea of reflection in one form
or another.
Coupling
Reflections
Exotica
Conclusion
Lindvall’s reflection coupling for Brownian motion
do the opposite till first meeting
Lindvall (1982): How to couple two Brownian motions?
Coupling
Reflections
Exotica
Conclusion
Lindvall’s reflection coupling for Brownian motion
do the opposite till first meeting
Lindvall (1982): How to couple two Brownian motions?
Generate first Brownian motion X beginning at x;
Coupling
Reflections
Exotica
Conclusion
Lindvall’s reflection coupling for Brownian motion
do the opposite till first meeting
Lindvall (1982): How to couple two Brownian motions?
Generate first Brownian motion X beginning at x;
Locate y , initial point for second Brownian motion;
Coupling
Reflections
Exotica
Conclusion
Lindvall’s reflection coupling for Brownian motion
do the opposite till first meeting
Lindvall (1982): How to couple two Brownian motions?
Generate first Brownian motion X beginning at x;
Locate y , initial point for second Brownian motion;
Construct line of reflection, hence reflection map H;
Coupling
Reflections
Exotica
Conclusion
Lindvall’s reflection coupling for Brownian motion
do the opposite till first meeting
Lindvall (1982): How to couple two Brownian motions?
Generate first Brownian motion X beginning at x;
Locate y , initial point for second Brownian motion;
Construct line of reflection, hence reflection map H;
Generate second Brownian motion Y using reflection of first;
Coupling
Reflections
Exotica
Conclusion
Lindvall’s reflection coupling for Brownian motion
do the opposite till first meeting
Lindvall (1982): How to couple two Brownian motions?
Generate first Brownian motion X beginning at x;
Locate y , initial point for second Brownian motion;
Construct line of reflection, hence reflection map H;
Generate second Brownian motion Y using reflection of first;
Couple in higher dimensions by reflecting in hyperplane . . . ;
Coupling
Reflections
Exotica
Conclusion
Lindvall’s reflection coupling for Brownian motion
do the opposite till first meeting
Lindvall (1982): How to couple two Brownian motions?
Generate first Brownian motion X beginning at x;
Locate y , initial point for second Brownian motion;
Construct line of reflection, hence reflection map H;
Generate second Brownian motion Y using reflection of first;
Couple in higher dimensions by reflecting in hyperplane;
This coupling is co-adapted (no “cheating”) and maximal.
Coupling
Reflections
Exotica
Co-adapted coupling is usually not maximal
Consider couplings for Ornstein-Uhlenbeck processes
dX
=
d B − 21 X d t ;
Conclusion
Coupling
Reflections
Exotica
Co-adapted coupling is usually not maximal
Consider couplings for Ornstein-Uhlenbeck processes
dX
=
d B − 21 X d t ;
e is begun at −x then reflection
If X is begun at x and X
coupling is maximal.
Conclusion
Coupling
Reflections
Exotica
Conclusion
Co-adapted coupling is usually not maximal
Consider couplings for Ornstein-Uhlenbeck processes
dX
=
d B − 21 X d t ;
e is begun at −x then reflection
If X is begun at x and X
coupling is maximal.
e is begun in statistical equilibrium
If X is begun at 0 and X
then reflection coupling is the best co-adapted coupling,
but is not maximal.
Coupling
Reflections
Exotica
Diffusion coupling
do more or less the opposite till first meeting
Lindvall and Rogers (1986), also Chen and Li (1989):
How to couple two copies of an elliptic diffusion?
(not necessarily maximal coupling, but co-adapted.)
Conclusion
Coupling
Reflections
Exotica
Diffusion coupling
do more or less the opposite till first meeting
Lindvall and Rogers (1986), also Chen and Li (1989):
How to couple two copies of an elliptic diffusion?
(not necessarily maximal coupling, but co-adapted.)
Specify the diffusion by a stochastic differential equation:
dX
=
σ(X ) d W + b(X ) d t .
Conclusion
Coupling
Reflections
Exotica
Diffusion coupling
do more or less the opposite till first meeting
Lindvall and Rogers (1986), also Chen and Li (1989):
How to couple two copies of an elliptic diffusion?
(not necessarily maximal coupling, but co-adapted.)
Specify the diffusion by a stochastic differential equation:
dX
=
σ(X ) d W + b(X ) d t .
Reflection map H = H(X ) now depends on σ(X ):
e
dX
=
e )H(X ) d W + b(X
e) d t .
σ(X
Conclusion
Coupling
Reflections
Exotica
Conclusion
Diffusion coupling
do more or less the opposite till first meeting
Lindvall and Rogers (1986), also Chen and Li (1989):
How to couple two copies of an elliptic diffusion?
(not necessarily maximal coupling, but co-adapted.)
Specify the diffusion by a stochastic differential equation:
dX
=
σ(X ) d W + b(X ) d t .
Reflection map H = H(X ) now depends on σ(X ):
e
dX
=
e )H(X ) d W + b(X
e) d t .
σ(X
Lindvall and Rogers (1986) consider when success is sure.
Coupling
Reflections
Exotica
Coupling Brownian motion on manifolds
be geometric about doing the opposite till first meeting
When the diffusion is Brownian motion on a Riemannian
manifold, the “mirror-map” H can be chosen accordingly.
Conclusion
Coupling
Reflections
Exotica
Coupling Brownian motion on manifolds
be geometric about doing the opposite till first meeting
When the diffusion is Brownian motion on a Riemannian
manifold, the “mirror-map” H can be chosen accordingly.
Reflect the Brownian noise using
Conclusion
Coupling
Reflections
Exotica
Coupling Brownian motion on manifolds
be geometric about doing the opposite till first meeting
When the diffusion is Brownian motion on a Riemannian
manifold, the “mirror-map” H can be chosen accordingly.
Reflect the Brownian noise using
(a) stochastic development,
Conclusion
Coupling
Reflections
Exotica
Coupling Brownian motion on manifolds
be geometric about doing the opposite till first meeting
When the diffusion is Brownian motion on a Riemannian
manifold, the “mirror-map” H can be chosen accordingly.
Reflect the Brownian noise using
(a) stochastic development,
(b) a geodesic connecting the two diffusions.
Conclusion
Coupling
Reflections
Exotica
Coupling Brownian motion on manifolds
be geometric about doing the opposite till first meeting
When the diffusion is Brownian motion on a Riemannian
manifold, the “mirror-map” H can be chosen accordingly.
Reflect the Brownian noise using
(a) stochastic development,
(b) a geodesic connecting the two diffusions.
Coupling can then be analyzed in terms of geometry,
relating success of coupling to curvature bounds.
Conclusion
Coupling
Reflections
Exotica
Exotic couplings
Coupling
Reflections
Exotica
Coupling real Brownian motion with time-integrals
Coupling planar BM and stochastic area
Coupling n-dimensional BM and all stochastic areas
Suppose we are more ambitious: is it also possible to couple
functionals of the process at the same time?
Conclusion
Coupling
Reflections
Exotica
Coupling Brownian motion with time-integrals
pause occasionally to let the time-integrals catch up
Conclusion
Coupling
Reflections
Exotica
Conclusion
Coupling Brownian motion with time-integrals
pause occasionally to let the time-integrals catch up
Required: to couple
couple A, B,
R
A d t,
R
B d t at the same time as we
Coupling
Reflections
Exotica
Conclusion
Coupling Brownian motion with time-integrals
pause occasionally to let the time-integrals catch up
R
R
Required: to couple A d t, B d t at the same time as we
couple A, B,
where A and B are co-adapted real Brownian motions.
Coupling
Reflections
Exotica
Conclusion
Coupling Brownian motion with time-integrals
pause occasionally to let the time-integrals catch up
R
R
Required: to couple A d t, B d t at the same time as we
couple A, B,
where A and B are co-adapted real Brownian motions.
R
We can set B = J d A, where J = ±1 is an adapted
function.
Coupling
Reflections
Exotica
Conclusion
Coupling Brownian motion with time-integrals
pause occasionally to let the time-integrals catch up
R
R
Required: to couple A d t, B d t at the same time as we
couple A, B,
where A and B are co-adapted real Brownian motions.
R
We can set B = J d A, where J = ±1 is an adapted
function.
Hence we have to choose J well so as to control
Z
Z
W , W d t = B − A, (B − A) d t
to hit (0, 0) .
Coupling
Reflections
Exotica
Conclusion
Coupling Brownian motion with time-integrals
pause occasionally to let the time-integrals catch up
R
R
Required: to couple A d t, B d t at the same time as we
couple A, B,
where A and B are co-adapted real Brownian motions.
R
We can set B = J d A, where J = ±1 is an adapted
function.
Hence we have to choose J well so as to control
Z
Z
W , W d t = B − A, (B − A) d t
to hit (0, 0) .
Ben Arous et al. (1995), K. and Price (2004).
Coupling
Reflections
Exotica
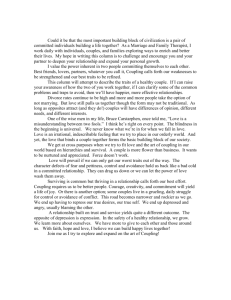
Coupling the Time-integral by Pausing
W alternates between 2BM (if J = −1)
and constant (if J = 1).
Conclusion
Coupling
Reflections
Exotica
Coupling the Time-integral
Horizontal axis: WR= B − A;
Vertical axis: V = W d t.
Conclusion
Coupling
Reflections
Exotica
Coupling many iterated time-integrals
. . . pause in a systematic encoded manner
Use a perturbed Morse-Thué sequence
+ - - + - + + - - + + - + - - +
Conclusion
Coupling
Reflections
Exotica
Conclusion
Application: Relativistic diffusion
small perturbations don’t affect strategy
Ismael Bailleul (PhD thesis, Paris-Sud 2006): Dudley (1973)’s
relativistic diffusion on Minkowski space (driven at
sub-light-speed by relativistic Brownian motion).
Coupling
Reflections
Exotica
Conclusion
Application: Relativistic diffusion
small perturbations don’t affect strategy
Ismael Bailleul (PhD thesis, Paris-Sud 2006): Dudley (1973)’s
relativistic diffusion on Minkowski space (driven at
sub-light-speed by relativistic Brownian motion).
limiting velocity direction;
asymptotically location lies on
parallel geodesic.
Coupling
Reflections
Exotica
Conclusion
Application: Relativistic diffusion
small perturbations don’t affect strategy
Ismael Bailleul (PhD thesis, Paris-Sud 2006): Dudley (1973)’s
relativistic diffusion on Minkowski space (driven at
sub-light-speed by relativistic Brownian motion).
limiting velocity direction;
asymptotically location lies on
parallel geodesic.
is this the full set of asymptotics?
Coupling
Reflections
Exotica
Conclusion
Application: Relativistic diffusion
small perturbations don’t affect strategy
Ismael Bailleul (PhD thesis, Paris-Sud 2006): Dudley (1973)’s
relativistic diffusion on Minkowski space (driven at
sub-light-speed by relativistic Brownian motion).
limiting velocity direction;
asymptotically location lies on
parallel geodesic.
is this the full set of asymptotics?
(compute conditional diffusion, coupling):
Coupling
Reflections
Exotica
Conclusion
Application: Relativistic diffusion
small perturbations don’t affect strategy
Ismael Bailleul (PhD thesis, Paris-Sud 2006): Dudley (1973)’s
relativistic diffusion on Minkowski space (driven at
sub-light-speed by relativistic Brownian motion).
limiting velocity direction;
asymptotically location lies on
parallel geodesic.
is this the full set of asymptotics?
(compute conditional diffusion, coupling):
Can we control (W , V ) to hit (0, 0) by switching K in {0, 1}?
dW
=
K d A + W d B − 32 W d t
dV
=
W dt .
Coupling
Reflections
Exotica
Conclusion
Application: Relativistic diffusion
small perturbations don’t affect strategy
Ismael Bailleul (PhD thesis, Paris-Sud 2006): Dudley (1973)’s
relativistic diffusion on Minkowski space (driven at
sub-light-speed by relativistic Brownian motion).
limiting velocity direction;
asymptotically location lies on
parallel geodesic.
is this the full set of asymptotics?
(compute conditional diffusion, coupling):
Can we control (W , V ) to hit (0, 0) by switching K in {0, 1}?
dW
=
K d A + W d B − 32 W d t
dV
=
W dt .
Coupling
Reflections
Exotica
Conclusion
Application: Relativistic diffusion
small perturbations don’t affect strategy
Ismael Bailleul (PhD thesis, Paris-Sud 2006): Dudley (1973)’s
relativistic diffusion on Minkowski space (driven at
sub-light-speed by relativistic Brownian motion).
limiting velocity direction;
asymptotically location lies on
parallel geodesic.
is this the full set of asymptotics?
(compute conditional diffusion, coupling):
Can we control (W , V ) to hit (0, 0) by switching K in {0, 1}?
dW
=
K d A + W d B − 32 W d t
dV
=
W dt .
YES
Coupling
Reflections
Exotica
Coupling planar Brownian motion
and Lévy stochastic area
pause when the areal difference gets too big
Lévy stochastic area
Z
Z
B1 d B2 − B2 d B1 ,
with symmetries given by the Heisenberg group.
Conclusion
Coupling
Reflections
Exotica
Conclusion
Coupling planar Brownian motion
and Lévy stochastic area
pause when the areal difference gets too big
Lévy stochastic area
Z
Z
B1 d B2 − B2 d B1 ,
with symmetries given by the Heisenberg group.
Invariance arguments: control the following to hit zero.
Z
A12 =
Z
B1 d B2 −
Z
Z
e
e
e
e
B2 d B1 −
B1 d B2 − B2 d B1
e 2 B1 .
e2 − B
+ B1 B
Coupling
Reflections
Exotica
Conclusion
Lévy stochastic area coupling strategy
SDEs
Coupling
Reflections
Exotica
Coupling n-dimensional Brownian motion
and all Lévy stochastic areas
Can we do the same for n-dimensional Brownian motion,
B = [B1 , . . . , Bn ]T ?
Conclusion
Coupling
Reflections
Exotica
Coupling n-dimensional Brownian motion
and all Lévy stochastic areas
Can we do the same for n-dimensional Brownian motion,
B = [B1 , . . . , Bn ]T ?
1
We
R need toR couple 2 n(n − 1) different stochastic areas
Bi d Bj − Bj d Bi .
Conclusion
Coupling
Reflections
Exotica
Conclusion
Coupling n-dimensional Brownian motion
and all Lévy stochastic areas
Can we do the same for n-dimensional Brownian motion,
B = [B1 , . . . , Bn ]T ?
1
We
R need toR couple 2 n(n − 1) different stochastic areas
Bi d Bj − Bj d Bi .
The invariant differences of stochastic area can be viewed
(as before) as entries in an n × n skew-symmetric matrix:
Z
Aij =
Z
Bi d Bj −
Z
Z
e
e
e
e
Bj d Bi −
Bi d Bj − Bj d Bi
ej − B
e j Bi .
+ Bi B
Coupling
Reflections
Exotica
Simple ideas don’t work
It is no good trying first to couple Aij , then Apq , et cetera.
Conclusion
Coupling
Reflections
Exotica
Conclusion
Simple ideas don’t work
It is no good trying first to couple Aij , then Apq , et cetera.
The best that can be done this way seems to be, to couple
a single “row” of stochastic areas:
A12 , A13 , A14 , . . . , A1n .
Coupling
Reflections
Exotica
Conclusion
Simple ideas don’t work
It is no good trying first to couple Aij , then Apq , et cetera.
The best that can be done this way seems to be, to couple
a single “row” of stochastic areas:
A12 , A13 , A14 , . . . , A1n .
Trying to couple more stochastic areas in this sequential
way is like herding cats!
Coupling
Reflections
Exotica
Conclusion
Simple ideas don’t work
It is no good trying first to couple Aij , then Apq , et cetera.
The best that can be done this way seems to be, to couple
a single “row” of stochastic areas:
A12 , A13 , A14 , . . . , A1n .
Trying to couple more stochastic areas in this sequential
way is like herding cats!
But a quite different technique allows us to couple the
whole set of stochastic areas at once.
Coupling
Reflections
Exotica
A general formulation for Brownian coupling
e is
The general co-adapted coupling between B and B
determined by an n × n covariance matrix J:
Conclusion
Coupling
Reflections
Exotica
Conclusion
A general formulation for Brownian coupling
e is
The general co-adapted coupling between B and B
determined by an n × n covariance matrix J:
h
i
dB
T
eT
×
d
B
d
B
e
dB
=
In
J
× dt .
JT In
Coupling
Reflections
Exotica
Conclusion
A general formulation for Brownian coupling
e is
The general co-adapted coupling between B and B
determined by an n × n covariance matrix J:
h
i
dB
T
eT
×
d
B
d
B
e
dB
=
In
J
× dt .
JT In
Matrix constraint (since right-hand side must be
nonnegative-definite):
JT J
≤
In .
Coupling
Reflections
Exotica
Conclusion
A general formulation for Brownian coupling
e is
The general co-adapted coupling between B and B
determined by an n × n covariance matrix J:
h
i
dB
T
eT
×
d
B
d
B
e
dB
=
In
J
× dt .
JT In
Matrix constraint (since right-hand side must be
nonnegative-definite):
JT J
≤
In .
Control theory arguments suggest we focus on orthogonal
matrices J, and be prepared for interfaces . . . .
Coupling
Reflections
Exotica
Conclusion
A general formulation for Brownian coupling (ctd.)
e define matrix of invariant differences of
Set X = B − B,
stochastic areas A as above.
Coupling
Reflections
Exotica
Conclusion
A general formulation for Brownian coupling (ctd.)
e define matrix of invariant differences of
Set X = B − B,
stochastic areas A as above.
Focus on distance V and areal discrepancy U
Coupling
Reflections
Exotica
Conclusion
A general formulation for Brownian coupling (ctd.)
e define matrix of invariant differences of
Set X = B − B,
stochastic areas A as above.
Focus on distance V and areal discrepancy U defined by
X
=
Vν
and
A
=
UZ ,
where ν is a randomly evolving unit vector
and Z is a randomly evolving skew-symmetric matrix of unit
Hilbert-Schmidt norm,
Coupling
Reflections
Exotica
Conclusion
A general formulation for Brownian coupling (ctd.)
e define matrix of invariant differences of
Set X = B − B,
stochastic areas A as above.
Focus on distance V and areal discrepancy U defined by
X
=
Vν
and
A
=
UZ ,
where ν is a randomly evolving unit vector
and Z is a randomly evolving skew-symmetric matrix of unit
Hilbert-Schmidt norm,
together measuring the geometric configuration underlying
the classical and areal distances.
Coupling
Reflections
Exotica
Relevant coupling recipes
K. (2007):
Use a little bit of mirror coupling:
Conclusion
Coupling
Reflections
Exotica
Relevant coupling recipes
K. (2007):
Use a little bit of mirror coupling:
the mirror strategy
J
=
In − 2νν T
Conclusion
Coupling
Reflections
Exotica
Relevant coupling recipes
K. (2007):
Use a little bit of mirror coupling:
the mirror strategy
J
=
In − 2νν T
Mix judiciously with a slight rotation coupling:
Conclusion
Coupling
Reflections
Exotica
Conclusion
Relevant coupling recipes
K. (2007):
Use a little bit of mirror coupling:
the mirror strategy
J
=
In − 2νν T
Mix judiciously with a slight rotation coupling:
J
=
exp −
γ
Z
U/V 2
SDEs
Coupling
Reflections
Exotica
Careful but simple estimates from stochastic calculus shows
that, under a mixture of these two strategies,
Conclusion
Coupling
Reflections
Exotica
Careful but simple estimates from stochastic calculus shows
that, under a mixture of these two strategies,
using a time-change d τe = 4V 2 d t/U 2 ;
Conclusion
Coupling
Reflections
Exotica
Careful but simple estimates from stochastic calculus shows
that, under a mixture of these two strategies,
using a time-change d τe = 4V 2 d t/U 2 ;
defining K = log V (spatial) and H = log U (areal),
Conclusion
Coupling
Reflections
Exotica
Conclusion
Careful but simple estimates from stochastic calculus shows
that, under a mixture of these two strategies,
using a time-change d τe = 4V 2 d t/U 2 ;
defining K = log V (spatial) and H = log U (areal),
we find that with a positive chance we can make
K , H tend to −∞ as τe → ∞ at approximately linear rates,
Coupling
Reflections
Exotica
Conclusion
Careful but simple estimates from stochastic calculus shows
that, under a mixture of these two strategies,
using a time-change d τe = 4V 2 d t/U 2 ;
defining K = log V (spatial) and H = log U (areal),
we find that with a positive chance we can make
K , H tend to −∞ as τe → ∞ at approximately linear rates,
and these rates are such that exp(K − H) = V /U tends to
+∞ at approximately linear rate (so τe tends to +∞ while t
remains bounded),
Coupling
Reflections
Exotica
Conclusion
Careful but simple estimates from stochastic calculus shows
that, under a mixture of these two strategies,
using a time-change d τe = 4V 2 d t/U 2 ;
defining K = log V (spatial) and H = log U (areal),
we find that with a positive chance we can make
K , H tend to −∞ as τe → ∞ at approximately linear rates,
and these rates are such that exp(K − H) = V /U tends to
+∞ at approximately linear rate (so τe tends to +∞ while t
remains bounded – Lamperti’s trick),
Coupling
Reflections
Exotica
Conclusion
Careful but simple estimates from stochastic calculus shows
that, under a mixture of these two strategies,
using a time-change d τe = 4V 2 d t/U 2 ;
defining K = log V (spatial) and H = log U (areal),
we find that with a positive chance we can make
K , H tend to −∞ as τe → ∞ at approximately linear rates,
and these rates are such that exp(K − H) = V /U tends to
+∞ at approximately linear rate (so τe tends to +∞ while t
remains bounded – Lamperti’s trick),
and nevertheless exp(H − 2K ) = U/V 2 tends to infinity
(required if the estimates are to work!).
Coupling
Reflections
Exotica
Conclusion
Careful but simple estimates from stochastic calculus shows
that, under a mixture of these two strategies,
using a time-change d τe = 4V 2 d t/U 2 ;
defining K = log V (spatial) and H = log U (areal),
we find that with a positive chance we can make
K , H tend to −∞ as τe → ∞ at approximately linear rates,
and these rates are such that exp(K − H) = V /U tends to
+∞ at approximately linear rate (so τe tends to +∞ while t
remains bounded – Lamperti’s trick),
and nevertheless exp(H − 2K ) = U/V 2 tends to infinity
(required if the estimates are to work!).
This implies, with positive chance U, V both
R ∞hit zero (so
coupling occurs) at the finite random time 0 U 2 /V 2 d τe.
Coupling
Reflections
Exotica
Conclusion
Careful but simple estimates from stochastic calculus shows
that, under a mixture of these two strategies,
using a time-change d τe = 4V 2 d t/U 2 ;
defining K = log V (spatial) and H = log U (areal),
we find that with a positive chance we can make
K , H tend to −∞ as τe → ∞ at approximately linear rates,
and these rates are such that exp(K − H) = V /U tends to
+∞ at approximately linear rate (so τe tends to +∞ while t
remains bounded – Lamperti’s trick),
and nevertheless exp(H − 2K ) = U/V 2 tends to infinity
(required if the estimates are to work!).
This implies, with positive chance U, V both
R ∞hit zero (so
coupling occurs) at the finite random time 0 U 2 /V 2 d τe.
Scaling arguments then show how to make coupling sure!
Coupling
Reflections
Exotica
Conclusion
Brownian motion functionals couple much more than I
thought was possible!
Conclusion
Coupling
Reflections
Exotica
Conclusion
Brownian motion functionals couple much more than I
thought was possible!
What about higher-order stochastic areas?
Conclusion
Coupling
Reflections
Exotica
Conclusion
Conclusion
Brownian motion functionals couple much more than I
thought was possible!
What about higher-order stochastic areas? We believe the
result generalizes, but the situation is complicated.
Coupling
Reflections
Exotica
Conclusion
Conclusion
Brownian motion functionals couple much more than I
thought was possible!
What about higher-order stochastic areas? We believe the
result generalizes, but the situation is complicated.
Carnot-Caratheodory distance may provide an alternative.
Coupling
Reflections
Exotica
Conclusion
Conclusion
Brownian motion functionals couple much more than I
thought was possible!
What about higher-order stochastic areas? We believe the
result generalizes, but the situation is complicated.
Carnot-Caratheodory distance may provide an alternative.
What about (finite-dimensional) hypoelliptic diffusions?
Should be straightforward (coupling strategies are robust).
Coupling
Reflections
Exotica
Conclusion
Conclusion
Brownian motion functionals couple much more than I
thought was possible!
What about higher-order stochastic areas? We believe the
result generalizes, but the situation is complicated.
Carnot-Caratheodory distance may provide an alternative.
What about (finite-dimensional) hypoelliptic diffusions?
Should be straightforward (coupling strategies are robust).
Applications . . . .
Coupling
Reflections
Exotica
Conclusion
Conclusion
Brownian motion functionals couple much more than I
thought was possible!
What about higher-order stochastic areas? We believe the
result generalizes, but the situation is complicated.
Carnot-Caratheodory distance may provide an alternative.
What about (finite-dimensional) hypoelliptic diffusions?
Should be straightforward (coupling strategies are robust).
Applications . . . .
Infinite-dimensional case . . . .
Coupling
Reflections
Exotica
Conclusion
Conclusion
Brownian motion functionals couple much more than I
thought was possible!
What about higher-order stochastic areas? We believe the
result generalizes, but the situation is complicated.
Carnot-Caratheodory distance may provide an alternative.
What about (finite-dimensional) hypoelliptic diffusions?
Should be straightforward (coupling strategies are robust).
Applications . . . .
Infinite-dimensional case . . . .
QUESTIONS?
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
Bibliography
This is a rich hypertext bibliography. Journals are linked to their homepages, and stable
or Project Euclid
) have been
URL links (as provided for example by JSTOR
added where known. Access to such URLs is not universal: in case of difficulty you
should check whether you are registered (directly or indirectly) with the relevant
provider. In the case of preprints, icons , , ,
linking to homepage locations are
inserted where available: note that these are probably less stable than journal links!.
Ben Arous, G., M. Cranston, and W. S. Kendall (1995).
Coupling constructions for hypoelliptic diffusions: Two examples.
In M. Cranston and M. Pinsky (Eds.), Stochastic Analysis: Summer Research
Institute July 11-30, 1993, Volume 57, Providence, RI Providence, pp. 193–212.
American Mathematical Society.
Chen, M. F. and S. F. Li (1989).
Coupling methods for multidimensional diffusion processes.
The Annals of Probability 17 (1), 151–177, .
Doeblin, W. (1938).
Exposé de la théorie des chaînes simples constants de Markoff á un nombre fini
d’états.
Revue Math. de l’Union Interbalkanique 2, 77–105.
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
Dudley, R. M. (1973).
Asymptotics of some relativistic Markov processes.
Proc. Nat. Acad. Sci. U.S.A. 70, 3551–3555, .
Kendall, W. S. (1986a).
Nonnegative Ricci curvature and the Brownian coupling property.
Stochastics and Stochastic Reports 19, 111–129.
Kendall, W. S. (1986b).
Stochastic differential geometry, a coupling property, and harmonic maps.
The Journal of the London Mathematical Society (Second Series) 33, 554–566.
Kendall, W. S. (2001).
Symbolic Itô calculus: an ongoing story.
Statistics and Computing 11, 25–35,
. Also: University of Warwick Department
of Statistics Research Report 327. .
Kendall, W. S. (2007).
Coupling all the Lévy stochastic areas of multidimensional Brownian motion.
The Annals of Probability to appear,
.
Also available as University of Warwick Department of Statistics Research Report
445 , including animations.
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
Kendall, W. S. and C. J. Price (2004).
Coupling iterated Kolmogorov diffusions.
Electronic Journal of Probability 9, 382–410, .
Also available as University of Warwick Department of Statistics Research Report
416 , with figures linked to animations.
Lamperti, J. (1972).
Semi-stable Markov processes. I.
Zeitschrift für Wahrscheinlichkeitstheorie und verve Gebiete 22, 205–225,
Lindvall, T. (1982).
On coupling of Brownian motions.
Technical report 1982:23, Department of Mathematics, Chalmers University of
Technology and University of Göteborg.
Lindvall, T. and L. C. G. Rogers (1986).
Coupling of multidimensional diffusions by reflection.
The Annals of Probability 14(3), 860–872, .
Pitman, J. W. (1976).
On coupling of Markov chains.
Z. Wahrscheinlichkeitstheorie und Verw. Gebiete 35(4), 315–322,
.
.
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
SDEs for single stochastic area (I)
Effect of reflection coupling:
(d V )2 = 4 d t ,
Drift d V = 0 ,
(d V ) × (d U) = 0
(d U)2 = 8V 2 d t ,
Drift d U = 0
so that the spatial distance V moves as a scalar Brownian
motion at least till it hits 0, and the areal discrepancy U moves
as a scalar Brownian motion subject to a V -dependent
time-change.
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
SDEs for single stochastic area (II)
Effect of synchronous coupling:
(d V )2 = 0 ,
Drift d V = 0 ,
(d V ) × (d U) = 0 ,
(d U)2 = 8V 2 d t ,
Drift d U = 0
so that the spatial distance V is held constant, while the areal
discrepancy U moves as a scalar Brownian motion subject to a
V -dependent time-change in the same way as for reflection
coupling.
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
SDEs for single stochastic area (III)
Apply Lamperti (1972)’s observation: the random time-change
4dt
=
V2 dτ .
makes K = log(V ) into an (interrupted) Brownian motion with
constant negative drift. Writing W = U/V 2 , and N indicating
whether process is in reflected coupling mode (N = 0 if W big),
(d K )2 = N d τ ,
(d K ) × (d W ) = 2NW d τ ,
(d W )2 = 2 1 + 2NW 2 d τ ,
1
Drift d K = − N d τ ,
2
Drift d W = 3NW d τ .
BACK
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
SDEs for multiple stochastic areas (I)
Use (τ -)time-scale defined by 4 d t = V 2 d τ ,
set W = U/V 2 , K = log(V ) and H = log(U),
and S = (J + JT )/2, A = (J − JT )/2;
1
(d K )2 =
1 − νT S ν d τ ,
2
1
n − tr S − 2 1 − ν T S ν
dτ ,
Drift d K =
4
1
(d K ) × (d H) = − ν T ZT A ν
dτ ,
W
1
(d H)2 = 2ν T ZT I + S Z ν
dτ ,
W2
1
1
n − 1 + tr S − ν T S ν − 4ν T ZT I + S Z ν
Drift d H =
dτ
2
W2
1
1 + tr ZT A
dτ .
2
W
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
SDEs for multiple stochastic areas (II)
Reflection coupling is defined by
Jreflection
=
I − 2ν ν T ,
which implies
(d K )2 = d τ ,
1
Drift d K = − d τ ,
2
(d K ) × (d H) = 0 ,
(d H)2 = 4kZ νk2
dτ
dτ
2
,
Drift
d
H
=
νk
.
n
−
1
−
4kZ
W2
W2
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
SDEs for multiple stochastic areas (III)
Synchronous coupling is defined by
Jreflection
=
I,
which implies
(d K )2 = 0 ,
Drift d K = 0 ,
(d K ) × (d H) = 0 ,
(d H)2 = 4kZ νk2
dτ
dτ
2
n
−
1
−
4kZ
νk
,
Drift
d
H
=
.
W2
W2
So if n ≥ 3 then H is a non-constant submartingale under both
controls!
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
SDEs for multiple stochastic areas (III)
Synchronous coupling is defined by
Jreflection
=
I,
which implies
(d K )2 = 0 ,
Drift d K = 0 ,
(d K ) × (d H) = 0 ,
(d H)2 = 4kZ νk2
dτ
dτ
2
n
−
1
−
4kZ
νk
,
Drift
d
H
=
.
W2
W2
So if n ≥ 3 then H is a non-constant submartingale under both
controls!
We need something more than reflection/synchronous
coupling.
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
SDEs for multiple stochastic areas (IV)
Use Taylor series and the adaptive rotation coupling
Jrotation (θZ) = exp θZ , θ = −γ/W ,
γ2
dτ
kZ νk2 2
4
W
dτ
γ2 Drift d K =
1 − 2kZ νk2
8
W2
dτ
(d K ) × (d H) = γkZ νk2 2
W
d
τ
(d H)2 = 4kZ νk2 2
W
γ d τ
Drift d H = −
− n − 1 − 4kZ νk2
2
W2
(d K )2 =
γ4
O(1) d τ ,
W4
γ4
+ 4 O(1) d τ ,
W
γ3
+ 4 O(1) d τ ,
W
γ2
+ 4 O(1) d τ ,
W
γ2 + γ3
O(1) d τ .
+
W4
+
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
SDEs for multiple stochastic areas (IV)
Use Taylor series and the adaptive rotation coupling
Jrotation (θZ) = exp θZ , θ = −γ/W ,
γ2
dτ
kZ νk2 2
4
W
dτ
γ2 Drift d K =
1 − 2kZ νk2
8
W2
dτ
(d K ) × (d H) = γkZ νk2 2
W
d
τ
(d H)2 = 4kZ νk2 2
W
γ d τ
Drift d H = −
− n − 1 − 4kZ νk2
2
W2
(d K )2 =
(so work with d τe = d τ /W 2 )
γ4
O(1) d τ ,
W4
γ4
+ 4 O(1) d τ ,
W
γ3
+ 4 O(1) d τ ,
W
γ2
+ 4 O(1) d τ ,
W
γ2 + γ3
O(1) d τ .
+
W4
+
BACK
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
Possible strategy for higher-order stochastic areas
construct traces of nonlinear invariant higher-order
stochastic areas;
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
Possible strategy for higher-order stochastic areas
construct traces of nonlinear invariant higher-order
stochastic areas; recursive construction and analysis . . .
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
Possible strategy for higher-order stochastic areas
construct traces of nonlinear invariant higher-order
stochastic areas; recursive construction and analysis . . .
compute stochastic differential system;
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
Possible strategy for higher-order stochastic areas
construct traces of nonlinear invariant higher-order
stochastic areas; recursive construction and analysis . . .
compute stochastic differential system;
identify perturbations in strategy for step-2 stochastic
areas (mixed reflection and small-rotation) which control
higher-order stochastic areas on slower time-scales
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
Possible strategy for higher-order stochastic areas
construct traces of nonlinear invariant higher-order
stochastic areas; recursive construction and analysis . . .
compute stochastic differential system;
identify perturbations in strategy for step-2 stochastic
areas (mixed reflection and small-rotation) which control
higher-order stochastic areas on slower time-scales, as in
Kendall and Price (2004) for iterated time-integrals.
BACK
References
SDEs for single stochastic area
SDEs for multiple stochastic areas
Possible future
Define “exotic”
Cambridge Advanced Learner’s Dictionary
Definition
exotic:
adjective
unusual and often exciting because of coming (or seeming to
come) from a distant, especially tropical country
BACK