Hydraulic Wind Power Transfer System Modeling Anjitha.K , B.Kavitha*
advertisement

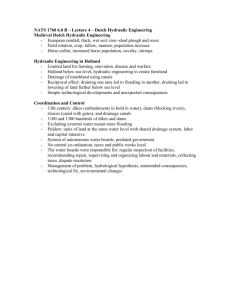
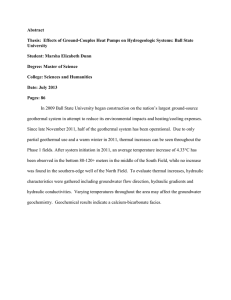
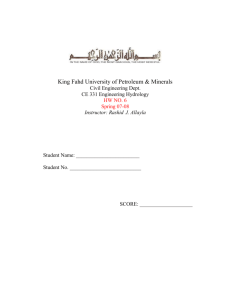
International Journal of Engineering Trends and Technology (IJETT) – Volume 33 Number 5- March 2016 Hydraulic Wind Power Transfer System Modeling Anjitha.K#1, B.Kavitha*2 # Final year PG student, Power System Engineering *Asst.Professor, Electrical and electronics department, Sri Krishna College of Technology, Coimbatore, India Abstract—A variable speed gearbox is conventionally used to transmit power from the wind turbine to the generator placed at the top of the tower. A hydraulic circuit replacing the gearbox system can remove much weight from the tower. Various wind turbines are connected to a centralized generator at the other end. A mathematical model of the hydraulic wind power transfer system is obtained and its several speed-step responses are made and compared with test results for accuracy. These simulations are carried out by MATLAB/SIMULINK software package. Keywords– Hydraulic wind power transfer system (HWPTS), mathematical modeling, variable speed gearbox, wind turbine I. INTRODUCTION Utilizing potential sources of renewable energy available around the world, we can fulfill all power demands and eliminate the negative effects of fossil fuels in power generation. The production costs of the wind energy harvesting units has been reduced following the recent advancements in wind turbine manufacturing and have resulted in the expansion of the application of wind power plants by 30%. Consequently, wind turbines can become one of the major power sources contributing to the world’s energy demands. However, the harvesting technology has remained in its traditional topology. Typical horizontal axis wind turbines include a rotor to convert the wind energy into the shaft momentum. This rotor is connected to a drivetrain, a gearbox, and an electric generator, which are integrated in a nacelle located at the top of the tower. These components, specifically the variable speed gearbox, are expensive, bulky, and require regular maintenance, which keeps wind energy production expensive. In addition, since the gearbox and generator are located on the top of the tower, its installation and maintenance are time consuming and expensive. Accumulation of the wind energy from several wind turbines in one central unit at the ground level is an innovative solution to address the above deficiencies. In this novel system, each wind tower harvests wind energy and converts it to a highpressure fluid. The energy flows from several wind turbine towers are combined and fed to the central ISSN: 2231-5381 unit. At this unit, the combined fluids are split between a main generator and an auxiliary generator. This technology will eliminate the weight from the tower which reduces the maintenance time and cost. Moreover, instead of having one generator and one variable gearbox for each wind tower, multiple wind turbines are integrated to ultimately reduce the capital cost. A hydraulic transmission system is identified as an exceptional means of power transmission in applications with variable input or output velocities such as manufacturing, automation, and heavy-duty vehicles. It offers fast response time, maintains precise velocity under variable input and load conditions, and is capable of producing high forces at high speeds. Moreover, HTS offers decoupled dynamics, allowing for multiple-input, single-output drivetrain energy transfer configurations. Earlier research has shown the possibility of using this type of power transfer technology in a wind power plant, even though it is not feasible in its electrical counterpart II.GEARBOX DRIVE SYSTEM A gearbox is typically used in a wind turbine to increase rotational speed from a low-speed rotor to a higher speed electrical generator. A common ratio is about 90:1, with a rate of 16.7 rpm input from the rotor to 1,500 rpm output for the generator. Some multi megawatt wind turbines have dispensed with a gearbox. In these so-called direct-drive machines, the generator rotor turns at the same speed as the turbine rotor. This requires a large and expensive generator. Other wind turbines on the market sit in-between, with gearbox ratios of about 30:1, dispensing with the highest speed stage in a typical gearbox. There is a trade-off between the reliability of gearboxes and gear stages and the cost of slower, higher torque generators. The design of a wind turbine gearbox is challenging due to the loading and environmental conditions in which the gearbox must operate. Torque from the rotor generates power, but the turbine rotor also applies large moments and forces to the windturbine drivetrain. It is important to ensure that the drivetrain effectively isolates the gearbox, or to ensure that the gearbox is designed to support these http://www.ijettjournal.org Page 213 International Journal of Engineering Trends and Technology (IJETT) – Volume 33 Number 5- March 2016 loads, otherwise internal gearbox components can become severely misaligned. This can lead to stress concentrations and failures. Wind-turbine drivetrains undergo severe transient loading during start-ups, shut-downs, emergency stops, and during grid connections. Loads that result in torque reversals may be particularly damaging to bearings, as rollers may be skidding during the sudden relocation of the loaded zone. Seals and lubrication systems must work reliably over a wide temperature variation to prevent the ingress of dirt and moisture, and perform effectively at all rotational speeds in the gearbox. Gear and bearing fatigue standards by AGMA and ISO are used for design; these only capture a subset of the potential failure modes of the components. For instance, the ISO 6336 gear standard provides an established method for calculating resistance to subsurface contact failure and for tooth root breakage. The standards are doing their job, but these are not the most common failure modes observed in wind turbine gearboxes. More common causes of failure are manufacturing errors such as grind temper or material inclusions, surface related problems, such as scuffing or micro pitting, and fretting problems from small vibratory motions, such as may occur when a machine is parked. Scuffing is adhesive wear and subsequent detachment and transfer of particles from one or both of the meshing teeth. It can happen quickly and is generally considered to be associated with an absence or breakdown of the lubricant film under high loads. Micro pitting is a surface fatigue resulting from generation or numerous surface cracks, and is associated with insufficient film thickness. Film thickness is affected by sliding speed, load, temperature, surface roughness, and chemical composition of the lubricant. Many wind-turbine gearboxes have also suffered from fundamental design issues such as ineffective interference fits that result in unintended motion and wear, ineffectiveness of internal lubrication paths and problems with sealing. Improving the resistance of future gearbox designs to all these issues is a key for the future cost of energy generated by wind turbines. III.HYDRAULIC WIND POWER TRANSFER SYSTEM The hydraulic wind power transfer system consists of a fixed displacement pump driven by the prime mover (wind turbine) and one or more fixed displacement hydraulic motors. The hydraulic transmission uses a hydraulic pump to convert the mechanical input energy into pressurized fluid. Hydraulic hoses and steel pipes are used to transfer the harvested energy to the hydraulic motors. A schematic diagram of a wind energy HTS is illustrated in Fig.1. As the figure demonstrates, a fixed displacement pump is mechanically coupled with the wind turbine and supplies pressurized ISSN: 2231-5381 hydraulic fluid to two fixed displacement hydraulic motors. The hydraulic motors are coupled with electric generators to produce electric power in a central power generation unit. Since the wind turbine generates a large amount of torque at a relatively low angular velocity, a high displacement hydraulic pump is required. The pump might also be equipped with a fixed internal speed-up mechanism. Flexible highpressure pipes/hoses connect the pump to the central generation unit. The hydraulic circuit uses check valves to ensure the unidirectional flow. A pressure relief valve protects the system components from the destructive impact of localized high-pressure fluids. The hydraulic circuit contains a specific volume of hydraulic fluid, which is distributed between the hydraulic motors using a proportional valve. Finally, the governing equations of the hydraulic circuits are obtained. Fig:1 IV.MATHEMATICAL MODEL The dynamic model of the hydraulic system is obtained by using governing equations of the hydraulic components in an integrated configuration. The governing equations of hydraulic motors and pumps to calculate flow and torque values are utilized to express the closed-loop hydraulic system behavior. Note that all parameters are measured in British Engineering units. V.FIXED DISPLACEMENT PUMP In the simulation tests we usually make use of the formula for the pump delivery. For a variable delivery pump, an approximate expression: (1) 3 -1 Qp - pump delivery [m .s ] αp - displacement angle of either a pump disk or casing [°] 3 -1 Kqp- pump delivery coefficient [m per°s ] ηvp-pump volumetric efficiency coefficient [-] Respective block diagram is shown: http://www.ijettjournal.org Page 214 International Journal of Engineering Trends and Technology (IJETT) – Volume 33 Number 5- March 2016 Δph -pressure fall in the engine [Pa] ηmh- coefficient of the engine's mechanic-hydraulic efficiency Respective block diagram is shown: Fig 2: Fixed displacement pump model VI.CHECK VALVE In simplified considerations one usually analyses the static characteristics of a valve, arising out of its catalogue specifications. In such a case one can make use of two formulas for different operational phases of the valve when closed and open. (2) Fig 4: Hydraulic motor VIII.PROPORTIONAL VALVE (3) Flow rate is given by equation: -Flow-rate through the valve [m3.s-1] -Slopecoefficient of the staticcharacteristics [m5.N-1.s-1] P -System operational pressure [Pa] valve's -Valve opening pressure set while in operation [Pa] Respective block diagram is shown: (6) -Gap aspect ratio -Cross sectional area -Pressure in the supply line -Pressure in flow controller chamber - Density of fluid Respective block diagram is shown below in figure: Fig 3: Check valve model Fig 5: Proportional valve model VII.HYDRAULIC MOTOR A displacement engine is usually described with two formulas. One of it regards absorptivity and the other its torque. According to the engine absorptivity can be put down as follows: IX.FLUID COMPRESSIBILITY Pressure value at a known flow rate is given by the equation: (4) 3 (7) 3 -1 Qs - fluid flow rate related to compressibility [m /s] Qh - engine absorptivity [m .s ] 3 Kqh- engine absorptivity coefficient [m ] 3 Vs - fluid volume subject to pressure effects[m ] -1 ωh- angular velocity of the engine shaft [s ]ηvhcoefficient of the engine's volumetric efficiency Es - fluid bulk modules [Pa], p - fluid pressure [Pa] D - Differentiating operator The torque developed by the engine amounts to: (5) Mh - torque [N⋅m] 3 Kmh-engine's torque coefficient [m ] ISSN: 2231-5381 http://www.ijettjournal.org Page 215 International Journal of Engineering Trends and Technology (IJETT) – Volume 33 Number 5- March 2016 Respective block diagram is shown below: Fig 6: Fluid compressibility model Fig 8: SIMULINK diagram of wind HTS X.HYDRAULIC LOAD The angular velocity of hydraulic engine shaft is given by equation: (8) Ih- moment of inertia of the engine and machine parts, 2 reduced upon the engine shaft [N⋅m⋅s ] Bh - resistance coefficient of viscous friction in the engine and machine parts, reduced upon the engine shaft [N⋅m⋅s] Mo - moment of technological resistance, resulting from the machine operation [N⋅m] The system model was simulated using MATLAB/Simulink package. A pulse width modulation (PWM) signal of 100 Hz with 10% duty cycle was used to control the proportional valve to direct the flow toward the auxiliary motor. The speed step response of the system was generated by applying a step voltage to the dc motor to accelerate the hydraulic pump from 0 to 300 rpm. After reaching a steady state, a second step voltage was applied to speed up the system from 300 to 400 rpm, followed by a step down back to 300 rpm to analyse the undershoots. The simulation parameters for the prototype model is given below in the table -1 TABLE 1: Prototype parameters ωh- angular velocity of the engine shaft[s ] SYMBO The block diagram is given below: QUANTITY VALUE UNIT L Pump 0.517 displacement Primary motor 0.097 displacement Auxiliary 0.097 motor displacement Fig.7: Hydraulic load model Primary motor 9.6 inertia X1.SIMULATION RESULTS The basic SIMULINK/MATLAB diagram to obtain the angular velocity of the system based on given parameters of a prototype is given below in figure: Auxiliary 4.8 motor inertia Primary motor 0.01416 damping Auxiliary 0.01150 moor damping ISSN: 2231-5381 http://www.ijettjournal.org Pump leakage 0.046- coefficient 0.068 Page 216 International Journal of Engineering Trends and Technology (IJETT) – Volume 33 Number 5- March 2016 Primary motor 0.06 pump leakage coefficient Auxiliary motor 0.01 pump leakage coefficient Pump/motor 0.90 Dimension total less efficiency Pump/motor 0.95 Dimension volumetric less efficiency β Fluid bulk 183695 psi modulus ρ Fluid density 0.0305 υ Fluid 1.105 Fig 10: SIMULINK diagram for mathematical model The system model was simulated using MATLAB/Simulink package. A pulse width modulation (PWM) signal of 100 Hz with 10% duty cycle was used to control the proportional valve to direct the flow toward the auxiliary motor. The speed step response of the system was generated by applying a step voltage to the dc motor to accelerate the hydraulic pump from 0 to 300 rpm. After reaching a steady state, a second step voltage was applied to speed up the system from 300 to 400 rpm, followed by a step down back to 300 rpm to analyze the undershoots. The simulation results obtained from the MATLAB/SIMULINK for velocity profile for mathematical model based on figure is given below: viscosity The simulation results obtained from the MATLAB/SIMULINK for velocity profile for a prototype model based on figure is given below: Fig 11: Velocity profile from mathematical model Fig 9: Velocity profile from prototype model The velocity profile for the prototype model is given below in figure .For a zero input the output velocity is also zero. When input is increased to 400 rpm the output increased to a higher value of 1100rpm and when it was decreased to 300rpm the output deceased to value of 820rpm. So for a given input the output velocity is of a higher value that can rotate the generator to get required electrical output. The SIMULINK/MATLAB block diagram for the hydraulic transfer system based on mathematical modelingis given below in figure 10: ISSN: 2231-5381 The velocity profile for the mathematical model is given below in figure .For a zero input the output velocity is also zero. When input is increased to 400 rpm the output increased to a higher value of 1000rpm and when it was decreased to 300rpm the output deceased to value of 780rpm. So for a given input the output velocity is of a higher value that can rotate the generator to get required electrical output. A slight difference is obtained in results between the prototype and mathematical model due to the geometrical difference between both models. The experimental results demonstrate the accuracy and performance of the mathematical model of the hydraulic wind energy transfer system. XI1.CONCLUSION This project introduced a gearless wind power transfer system as an alternative to traditional wind turbine drivetrains. A mathematical model of the hydraulically driven energy harvesting system was obtained. The dynamic behavior of the mathematical model to a velocity step input demonstrated a close agreement with the results obtained from the http://www.ijettjournal.org Page 217 International Journal of Engineering Trends and Technology (IJETT) – Volume 33 Number 5- March 2016 experimental setup. The mathematical model could be used to scale the system for an industrial-level wind power plant. Exclusive benefits of implementing such a system based on the proposed model include 1) eliminating the variable speed gearbox using a hydraulic circuit; 2) having one central generator instead of multiple generators, which decreases the capital cost of the wind power plant; and 3) displacing most of the equipment from the nacelle to the ground to obtain better accessibility to the generation unit and to reduce the maintenance costs and time. ACKNOWLEDGEMENT The authors would like to thank the Principal, the HoD and to all faculty members of EEE Department, Friends who have render their valuable help in completing this paper successful. REFERENCES [1] [2] [3] [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] Z. Jedrzykiewicz, J. Pluta, and J. Stojek, ―Application of the MATLAB— Simulink package in the simulation tests on hydrostatic systems,‖ ActaMontan, vol. 1, pp. 29–36, 1998. G. A. Sohl and J. E. Bobrow, ―Experiments and simulations on the nonlinear control of a hydraulic servosystem,‖ IEEE Trans. Control Syst. Technol., vol. 7, no. 2, pp. 238–247, Mar. 1999. S. Habibi and A. Goldenberg, ―Design of a new high performance electrohydraulic actuator,‖ in Proc. 1999 IEEE/ASME Int. Conf. Adv. Intell. Mechatron., Atlanta, GA, USA, Sep. 19–23, 1999. S. Habibi and A. Goldenberg, ―Design of a new highperformance electrohydraulic actuator,‖ IEEE/ASME Trans. Mechatron., vol. 5, no. 2, pp. 158–164, Jun. 2000. K. Dasgupta, ―Analysis of a hydrostatic transmission system using low speed high torque motor,‖ Mech. Mach. Theory, vol. 35, pp. 1481–1499, Oct. 2000. J. G. Slootweg, H. Polinder, and W. L. Kling, ―Dynamic modeling of a wind turbine with doubly fed induction generator,‖ in Proc. IEEE Power Eng. Society Summer Meeting, Vancouver, Canada, 2001. J. G. Slootweg, S. W. H. de Haan, H. Polinder, and W. L. Klimg, ―General model for representing variable speed wind turbine in power system dynamics simulations,‖ IEEE Trans. Power Syst., vol. 18, no. 1, pp. 144–151, Feb. 2003. S. G. Kim, J. H. Kim, and W. S. Lee, ―Hydraulic system design and vehicle dynamic modeling for development of a tire roller,‖ Int. J. Contr. Autom. Syst., vol. 1, no. 4, pp. 89–94, Dec. 2003. K. Wu et al., ―Modelling and identification of a hydrostatic transmission hardware-in-the-loop simulator,‖ Int. J. Veh. Des., vol. 34, pp. 52–64, 2004. T. Senjyu, R. Sakamoto, N. Urasaki, H. Higa, K. Uezato, and T. Funabashi, ―Output power control of wind turbine generator by pitch angle control using minimumvariance control,‖ Elect. Eng. Jpn., vol. 154, no. 2, pp. 1–18, Jan. 2006. Y. Lei, A. Mullane, G. Lightbody, and R. Yacamini, ―Modeling of wind turbine with a doubly fed induction generator for grid integration studies,‖ IEEE Trans. Energy Convers., vol. 21, no. 1, pp. 257–264, Mar. 2006. A. V. Akkaya, ―Effect of bulk modulus on performance of a hydrostatic transmission control system,‖ SadhanaAcad. Proc. Eng. Sci., vol. 31, pp. 543–556, Oct. 2006. U.S. Department of Energy, (2008, May). Wind energy by 2030–Increasing wind energy’s contribution to U.S. ISSN: 2231-5381 [14] [15] [16] [17] [18] [19] [20] electricity supply.DOE/GO2567.[Online].Available:http://www1.e ere.energy.gov/windandhydro/pdfs/41869.pdf. S. Eriksson, H. Bernhoff, and M. Leijon, ―Evaluation of different turbine concepts for wind power,‖ Renew. Sustain. Energy Rev., vol. 12, no. 5, pp. 1419–1434, Jun. 2008. A. Ragheb and M. Ragheb, ―Wind turbine gearbox technologies,‖ in Proc.1st Int. Nucl. Renew. Energy Conf. (INREC10), Amman, Jordan, Mar. 2010. B. Ji-Zhong, X. Ai-Guo, Y. Xin-Hua, and Z. Li-Kun, ―Simulation model of hydraulic turbine speed control system and its parameters identification based on resilient adaptive particle swarm optimization algorithm,‖ in Proc. Power and Energy Eng. Conf. (APPEEC), Mar. 2010, pp. 1–4. A. V. Akkaya, ―Effect of bulk modulus on performance of a hydrostatic transmission control system,‖ Sadhana, vol. 31, no. 5, pp. 543–556, Oct. 2006. [20] S. Hamzehlouia, A. Izadian, A. Pusha, and S. Anwar, ―Controls of hydraulic wind power transfer,‖ Proc. IECON, Melbourne, Australia, 2011. A. Pusha, A. Izadian, S. Hamzehlouia, N. Girrens, and S. Anwar, ―Modeling of gearless wind power transfer,‖ in Proc. IECON, Melbourne, Australia, 2011. S. Hamzehlouia and A. Izadian, “Modeling of hydraulic wind power transfers,” in Proc. Power Energy Conf. (PECI), Champaign, IL, USA, 2012. A. Izadian, ―Central Wind Turbine Power Generation,‖ U.S. PatentApplication US2013/0127166 A1, May 23, 2013. http://www.ijettjournal.org Page 218