International Journal of Engineering Trends and Technology (IJETT) – Volume... K.Priyanka S.Ramya Krishna
advertisement
 – Volume... K.Priyanka S.Ramya Krishna")
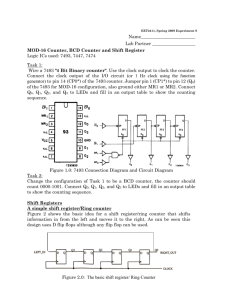
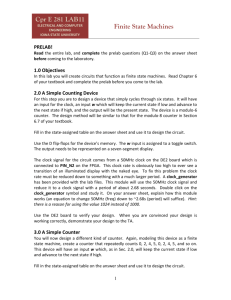
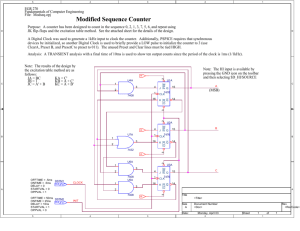
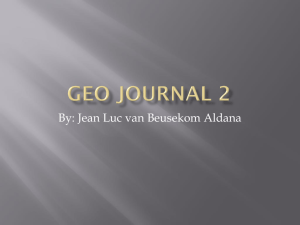
International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 2 – March 2015 A Robust UART Implementation with Built in Self Test K.Priyanka 1, M.Naga Raju 2, S.Ramya Krishna 3, M.Narendra 4, S.Neelima 5 1,2,3,4 5 UG Student, Electronics & Comm. Engineering, Gandhiji Institute of Sci. & Tech., Jaggaiahpet, A.P, India Associate Professor& Head, Electronics & Comm. Engineering, Gandhiji Institute of Sci. & Tech., Jaggaiahpet, A.P, India Abstract: Universal Asynchronous Receive/Transmit (UART) has the objectives of firstly to satisfy specified testability requirements, and secondly to generate the lowest-cost with the highest performance implementation. UART has been an important input/output tool for decades and is still widely used. The additional BIST circuit that increases the hardware overhead increases designs time and size of the chip, which may degrade the performance. This paper focuses on the design of a UART chip with embedded BIST architecture using simple LFSR with the help of VHDL language. The paper describes the problems of (VLSI) testing followed by the behavior of UART that includes both transmitter and receiver section using VHISC Hardware Description Language (VHDL). In this paper, the simulation result is compared with previous work and it has been seen that the result is promising and helps to reduce timing constraints and overall power dissipation. Keywords— Detection, Fault, Intermittent, Reliability, RISC, Microprocessor in Self test Technique (BIST) is included in the MECA and in each of Processing Element in MECA. I. INTRODUCTION This project develops a built-in self-detection and correction (BISDC) architecture for motion estimation computing arrays(MECAs).Based on the error detection & correction concepts of biresidue codes, any single error in each processing element in an MECA can be effectively detected and corrected online using the proposed BISD and builtin self-correction circuits. Performance analysis and evaluation demonstrate that the proposed BISDC architecture performs well in error detection and correction with minor area. In this Project the Built- ISSN: 2231-5381 Figure 1: BIST Architecture Thus by introducing the BIST Concept the testing is done internally without Connecting outside testing Requirements. So the area required is also reduces. And in this Project the Errors in MECA are Calculated and the Concept of Diagnoses i.e. Self Detect and Self Repair Concepts are introduced. The area results are compared with the MECA without BIST http://www.ijettjournal.org technique. Fig.2 shows the Page 77 International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 2 – March 2015 corresponding BISDC implementation. Signals to the internal FPGA clock. A reset input is TC1and TC2 are utilized to select data paths from recommended in case somehow the code gets stuck. Cur. Pixel and Ref.pixel, respectively. A transmit button for when we are ready to transmit our data, and finally we need one output pin. Let’s see the block diagram in Fig.3. Figure 2: Block Diagram of Proposed MECA BISDC The output of a specific PEi can be delivered to a detector for detecting errors using the DC1 signal. Moreover, the selector circuit is controlled by signals SC1 and SC2 that receive data from a specific PEi+1, and then export these data to the Figure 3 UART Transimtter next specific PEi or syndrome analysis and corrector (SAC) for error correction. Based on the Ok, for our state diagram, we know a few things concepts of BIST and biresidue codes, this paper already. We know that we need a clock to run some presents a built-in self-detection/correction (BISDC) kind of counter, and we know that our transmitter to be in two different architecture that effectively self-detects and self- will always need corrects PE errors in an MECA.Notably, any array- states, IDLE and TRANSMITTING. based computing structure, such as the discrete cosine transform (DCT), iterative logic array (ILA), and finite-impulse filter (FIR), is suitable for the proposed method to detect and correct errors based on biresidue codes. State machines will always have two II. BLOCK DIAGRAM imporant registers, state and nextstate. These make First, let’s figure out what pin inputs and outputs sure that you can transition between states in your we need. In this case, I will use 8 switches to input case statement. Next we have to choose the speed 8 bit data that will be sent across the serial we want to transmit the data at. This is called the communication output. A clock is a must to connect baud rate. There are many baud rates and I will let ISSN: 2231-5381 http://www.ijettjournal.org Page 78 International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 2 – March 2015 you look them up if you want to, but I will use 9600, which is pretty standard. To have this baud rate, a counter is needed: Counter = FPGA clock speed / baud rate; In this example I have an FPGA clock speed of 50MHz, therefore my counter is 5208 for the baud rate of 9600. Registers - state, nextstate, counter, shiftregister. inputs - data, clk, reset transmit. output - TxD. Is there anything more needed? Yes, more registers, Why? We have a counter that will count up to a certain number each time the 50MHz clock ticks, Figure 4: State Diagram of BIST Transmitter after it reaches that number, it will do something. From above, the counter is 5208 for a baud rate of 9600. We have 11 bits, so we need bit counter register to count when we reach the number of bits sent, so we can stop transmission. We also need a clear register. This sets the bitcounter back to zero so that the next transmission can begin. Finally, a shift register is needed so the program knows when to shift and prepare the next bit on the serial line. Now we can start drawing state diagrams. State Diagrams. Here is the state diagram for the first part of the program. Anything to the left of an if statement (the diamond shaped box) means TRUE and to the right or bottom of the if statement means FALSE. The transmitter starts in the zero state, IDLE. Of course, the transmitter cannot begin in the transmitting state. This is done by setting your initial state register value to zero. So what is happening in these boxes? The first box shows what happens when the program first starts running. Because no other boxes below reference back to it, this will only happen when your program starts. Load, shift and clear are set to zero. This is because we do not want to shift the shift register when the program is idling (not transmitting) and send the wrong information over the serial line. We also do not want to set the bit counter to zero as it will not let us increase it when we are transmitting, and we do not have any data to load from just yet. In UART communications, the line is held high to show that nothing is being transmitted (I am talking about our output TxD). When the line goes low, both receiver and transmitter know that transmission is about to begin. This is why our start bit is always equal to zero. When communication is ready to end, the line goes high again and the ISSN: 2231-5381 http://www.ijettjournal.org Page 79 International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 2 – March 2015 transmission stops. This is why the end bit is is sent until the most significant. This means that always equal to one. The diagram tells us the the receiver must account for this and know how to following: We move to the IDLE state and see if re-arange the data so that it is received in the the input transmits is 1. This input can be as simple correct order. The state stays in TRANSMIT until it as a physical switch we press to tell the program we is equal to 10 and goes back to IDLE. But wait.... are going to transmit. If the transmit is zero, we go where is the counter we need and all that other stuff? back to the IDLE state and keep waiting until that We are not done yet! This is just a state diagram of switch is pressed. If it is pressed, and then transmit what we are supposed to do. Everything must run is one and the program moves to the next state, from the FPGA clock, therefore another "state TRANSMIT. diagram" must be created that lets us run the Transmit just makes sure that the bit counter is not program from the clock and perform all of this over 11. Remember, we have 11 bits, the start bit, 8 smoothly. So here it goes: data bits, 1 parity bit and a stop bit. When the bit First the system is reset. This can be a counter reaches 11, it means that it has completed physical switch that sets everything to factory its task of transmitting. Shift is left high until then. settings. This is in the case the program deadlocks We can see that by the left statement of if (bit you can have the option to reset the system without counter>=10). Remember in Verilog we count the reprogramming the FPGA. After this, counter starts zero state, so 10 actually mean 11. When we counting at each positive edge of the FPGA clock. reached our goal of an 11 bit transmission, the clear must go high; so to clear the bit counter back to zero and get ready for the next transmission. Also the next state must go back to IDLE so that it can wait for the next time you push the button to transmit data again. If bit counter is not greater or equal to 10, naturally we must stay in TRANSMIT mode and therefore the next State will be TRANSMIT (1 in this case). Also, we must put shift to 1 because we want to shift our shift register. so the next bit can be shifted onto our TxD output pin to be transmitted. This is done in TxD = shiftreg[0]. NOTE - Transmission begins from the least significant and as bits are shifted, one by one ISSN: 2231-5381 http://www.ijettjournal.org Page 80 International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 2 – March 2015 When the counter reaches 5208, it is ready xbee at commands: complete architectue of xbee is to do something. 5208 is the number calculated to discussed in the next chapter .but during the get a 9600 baud rate depending on our FPGA clock implementation the transmitter transmits the AT speed. In other words, the counter is used to slow command through uart With the exception of the down the 50MHZ FPGA clock for our program to first command (+++) all the following commands work at 9600 baud. Also, above says 5027 plus zero should be used while in AT Command mode and state = 5208. At each time that the counter reaches the user should press enter after typing the 5208 we set state to next State. Next State is always command. It is important to remember that the user changed in the above state diagram, Figure 2. The should never press the enter key after typing the reason for doing this is to make the program Enter AT Command (+++). If you wait three synchronous to the clock (or counter). Therefore the seconds while inside the AT Command mode the transition from IDLE to TRANSMIT and vice versa terminal will automatically exit AT Command only happens at each 5208 count of the counter. mode and enter back into Chat mode. All other Counter is also reset each time it reaches 5208 so typed AT Commands must be followed by hitting that it can start to count up to 5208 again and do the the enter key. All Commands, unless otherwise same thing over and over again. NOTE - this state noted, are for Series 2 XBee units. diagram shows if statements for shift and clear unconnected. Actually shift, clear and load are connected to the block statement that load is connected to so they run simultaniously. Saying this, At each time the counter reaches 5208 it will check is load =1? shift = 1? clear = 1? If load = 1 the rightshiftregister loads the data that is to be transmitted. This is why, once the state goes from IDLE to TRANSMIT, load goes high. It ensures that data is loaded into the register and is ready to lcd and led display: be transmitted. When shift is high, rightshiftreg = rightshiftreg>>1. This is a shift operator in verilog and shifts the data right one time. Bitcounter is also incremented once. This tells the program that one bit was already sent. the space detected is displayed on both led and lcd .LCD dislay in 16 bit segment which is capable of characters and strings .still detail operation are mentioned in hardware information. fpga contains 8 bit display for on state of signal led glows. ISSN: 2231-5381 http://www.ijettjournal.org Page 81 International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 2 – March 2015 III. SIMULATION RESULTS For functioning of zigbee module an at command is being transfered .the result show the strings but Input clock: ascii value of the command is transferred an finite state machine is used to send the each ascii value Figure 5: Topmodule resultant window Figure 8: Finite state representation Fig 5 shows that clock input is triggered for 10 ns but in fpga implementation clock is 50 mhz .for every rising edge of the clock pulse the module initiate transmit or receive the data. DCETX is the transmitting pin of uart. space is the total space available for parking.reset is given for 20 ns to make all states to initilize position and enable is made zero for 10 ns for which module doesnt work Figure 9: Transmitter module for uart communication The bits are sent in a serial order with 9600 baud rate. condition. Figure 6: Transmitting and receiving data Fig 6 condition signal shows that the AT command for zigbee module has been transferred and module is ready to receive the reply from the module. Figure 7: Transmitting AT command Figure 10: RTL schematic of top module ISSN: 2231-5381 http://www.ijettjournal.org Page 82 International Journal of Engineering Trends and Technology (IJETT) – Volume 21 Number 2 – March 2015 Author’s Profile K.PRIYANKA References 1. is a Graduate student, persuing her B.Tech in ECE specialization in Gandhiji Institute of Science & Technology. Her interested areas are VLSI, Signal processing. She is the Team leader of this project. M.NAGA RAJU is a Graduate student, persuing his B.Tech in ECE specialization in Gandhiji Institute of Science & Technology. His interested area is VLSI. Chun-lung Hsu, chang-Hsin Cheng, and Yu Liu, “Built- in self-detection/correction Architecture for Motion Estimation Computing Arrays”, IEEE Transcations on Very Large Scale Integration (VLSI) systems, VOL.18, NO.2, February 2010, pp.319-324. 2. Thammavarapu R.N Rao, Member, IEEE, “Biresidue Error-Correcting Codes for Computer Arithmetic”, IEEE Transactions on computers, VOL. C-19, NO. 5, May 1970, pp.398-402. 3. Meihua GU, Ningmei YU, Lei ZHU, Wenhua JIA, “High Throughput and Cost Efficient VLSI Architecture of Integer Motion Estimation for H.264/AVC”, Journal of Computational Information S.RAMYA KRISHNA Systems 7:4 (2011), pp.1310-1318. 4. Zhong-Li He, Chi-Ying Tsui, Member, IEEE, KaiKeung Chan, and Ming L. Liou, Fellow, IEEE, “Low-Power VLSI Design for Motion Estimation Using Adaptive Pixel Truncation”, IEEE transactions on circuits and systems for video technology, VOL.10, NO.5, August 2000, pp.669- 677. 5. R. J. Higgs and J. F. Humphreys, “Two-errorlocation for quadratic residue codes,” Proc. Inst. Electr.Eng. Commun, vol. 149, no. 3, Jun.2002, pp.129–131. 6. Mohd Yamani Idna Idris, Mashkuri Yaacob, Zaidi Razak, “A VHDL Implementation Of UART Design with BIST capability” 7. Dr. T.V.S.P. Gupta, Y. S.RAMYA KRISHNA is a Graduate student persuing her B.Tech in ECE specialization in Gandhiji Institute of Science & Technology. Her interested area is Signal processing. M.NARENDRA is a Graduate student persuing his B.Tech in ECE specialization in Gandhiji Institute of Science & Technology. His interested area is VLSI. S.NEELIMA is working as Associate professor & Head for ECE Dept. in Gandhiji Institute of Science & Technology. She has guided several students in the field of VLSI and Signal Processing, VLSI Nano technology. Kumari,M.Asok Kumar”UART realization with BIST architecture using VHDL” International Journal of Engineering Research and Applications (IJERA) ISSN: 22489622 www.ijera.com Vol. 3, Issue 1, January February 2013, pp.636-640 8. M.S. Harvey,Generic UART Manual,Silicon Valley,December 1999 ISSN: 2231-5381 http://www.ijettjournal.org Page 83