Human Powered Flywheel Motor - A Review
advertisement

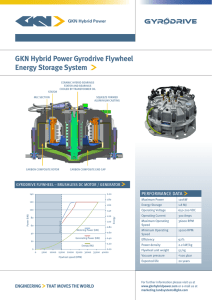
International Journal of Engineering Trends and Technology (IJETT) – Volume 8 Number 1- Feb 2014 Human Powered Flywheel Motor - A Review K.K.Padghan1, Prof. A.K. Pitale², Prof J.P.Modak³, A.P. Narkhedkar4 1 2 3 Scholar M.E. (CAD/CAM), PRMIT&R, Badnera, India, Professor, Dept of Mech Engg, PRMIT&R, Badnera, India, Emeritus Professor, Dept of Mech Engg, Priyadaeshani C.O.E. Nagpur, India, 4 Scholar M.E. (CAD/CAM), PRMIT&R, Badnera, India. Abstract - As man-machine system model can be established, the machine has essentially developed on the basis of general mechanical design. Human Power Flywheel Motor is a man-machine system model. It consist of three main units, a pedal driven flywheel motor, the transmission between flywheel shaft and the input shaft of process unit, and the process unit. This literature report is review of Human power flywheel motor; the survey proved to be system has functional and economically viable. to sprocket centrally which further connected with smaller sprocket which is first shaft of energy unit and transmitted its motion by chain drive. Key Words - Human energized flywheel motor, chaff Cutter, Brick Making Machine, Pedal operated flour Mill, Experimental model, and optimization. I. INTRODUCTION During 1979-99, Dr. J.P. Modak (1982, 1994, 1997, 1998 and n.d.) developed human power brick-making machine for manufacturing brick making machine. This machine human power is main energy source [1]. Human power flywheel motor the principal involved for this motor is that this machine has proved that on average ,the power produced by human approximately 75W (0.10 hp)[Alexandrove,1981][2]. It is possible to mechanized process needing power far too in excess of human capacity by using intermittent without affecting end product. The mounting energy crisis and unemployment in the developing countries suggest towards more effort in utilization of human muscular power. At the time when the “Appropriateness” of technology is being questioned daily, the bicycle which is perhaps the most “Appropriate” and efficient machine ever intended is making a sudden come back in area of power known as Human Power. Essentially this machine consists of three sub system: 1) The Peddling Unit, 2) Transmission unit, and 3) The process unit. The energy unit consists of conventional bicycle mechanism, the transmission unit consists of clutch and gears, process units consist of an auger, a cone, and die. [2] II. DESCRIPTION OF FLYWHEEL MOTOR As Alexandrove 1981 start to powered human energy to machine, with effect human energy is energies by using intermittent like as gear and flywheel motor. And Dr. J.P.Madak 1977 and his associate are working on flywheel motor, a manually driven brick making machine was first kind in which flywheel motor is used first time [5]. Essentially machine consist of three sub system: 1) The Peddling Unit, 2) Transmission unit, and 3) The process unit. The peddling unit consist conventional bicycle mechanism on rigid bicycle frame. A seat is provided in the bicycle frame for sitting purpose. This seat is adjusted on the extended portion of rod by nut and bolt arrangement. Also this gives the comfort condition to the rider. This unit comprises of sprocket, a pedal crank and crank set. The sprocket has ‘n’ no. of teeth as per required power transmission. Pedal crank is attach ISSN: 2231-5381 As shown in figure1 the mechanism ‘M’ is energized by the rider by pedaling at big sprocket chain drive ‘BSC’ there by converting the oscillatory motion of thighs into rotational motion of counter shaft ‘Cs’. The pair of speed increasing gears connects the counter shaft ‘Cs’ with the flywheel shaft ‘Fs’ [4].Driver pumps the energy in flywheel at energy rate convenient to him [4]. In this way, the muscular energy of human is converted into kinetic energy and stored into flywheel by this man machine system and for its efficient use it is necessary to optimize its parameters [4]. III. PERFROMANCE PARAMETERS Initially, the flywheel motor was developed only on the institution of human, not based on any design data; rather it was built [5]. But later with the numerous experimentation the design data is made available which is discussed below. 1) Flywheel size and Moment of Inertia: In the mechanism having flywheel meshed arrangement, the size of the flywheel and its moment of inertia also plays the vital role in the terminal velocity of flywheel. Modak J.P (1987) during the experimentation has observed that for the average person of 165 cm stature from age group 20-24 years maximum thigh oscillation is 40. [4]. Therefore with the available chain drive for existing 22” bicycle frame the flywheel speed of 240 rpm was found appropriate enough from point of total speed rise from pedals to flywheel shaft [4]. In order to store the maximum energy in flywheel irrespective of speed fluctuation, Modak J.P.(1987) has determined the size of flywheel (180-240 rpm)[4]. During his research the Flywheel rim diameter is found to 82 cm which gives the weight of flywheel as 150Kg and 266 Kg for 240 rpm and 180 rpm respectively. Hence Modak J.P.(1987) suggested the flywheel with 150 Kg @240 rpm[4]. Further Modak J.P. (1987) has also found that Moment of inertia has no effects on http://www.ijettjournal.org Page 5 International Journal of Engineering Trends and Technology (IJETT) – Volume 8 Number 1- Feb 2014 required driving torque at pedal and stores same energy for same frequency of thigh oscillation [4]. 2) Gear Ratio: The rider should feel easy to drive mechanism as well his muscle power should be converted into maximum possible motion. In order to provide the ease to operator it is necessary to reduce the harness effect of vibration and jerk at the process unit shaft. Hence Modak J.P. (1987) suggested the value of gear ratio as 4:1 so as to reduce the effect of jerk induced at process unit shaft as result of energy or momentum exchange during the clutch engagement. If lower value of gear ratio is to be used then flywheel speed should be maintained higher than 240 rpm [4]. IV. IMPROVEMENT IN EXISTING BICYCLE MECHANISM It is modified form of mechanism called as Quick Return Ratio One. In the existing mechanism, the ratio of forward travel to return travel is 0.82. In the Quick Return Ratio One, the ratio is one therefore, the second paddle will be immediately ready when the first one goes down. In this, the thigh oscillation angle, thigh length and the leg length are kept same. In existing mechanism, the crank length is 18.5 cm and in QRR- one it is 20 cm. Similarly, in existing mechanism the frame length i.e. crank centre to rider’s hip joint 74 cm and frame inclination to vertical is 200. But in QRR-one, the frame length ie. Crank centre to rider’s hip joint 67cm and frame inclination to vertical is 110 2) Elliptical Sprocket : For the efficient use of the system it is necessary to make maximum use of the human energy. But Modak J.P. has observed that among the 360° revolution of pedal only part of it produces the necessary useful torque. This is because of the limitation of existing bicycle drive .Modak J.P (1985) has established the relationship between the useful torque developed at the crank as function of crank position during its revolution [8]. The observations made by Modak J.P. are tabulated below. Serial no. 1 Crank position from TDC 0°-30° Torque Partially useful 2 30°-115° Useful 3 115°-162 Partially useful 4 162°-360° Idle Table 1: Relation between crank position and torque produced. Even when both the cranks are considered the useful driving angle is found to be 154°. [8].Consequently for improvement in maximum utilization of operators energy Modak J.P. suggested three modified mechanisms namely Quick return ratio one, Double lever inversion and Elliptical sprocket[8].Based on his mathematical modeling he concluded improvement of 18%,38% and17%, in human energy utilization for Elliptical sprocket, Quick return ratio one, Double lever inversion and respectively. This performance of various bicycle drives then was experimentally verified by Modak J.P., Chandurkar K.C. (1987) and found almost matching with theoretical values [7]. 1) Quick return ratio-one : Fig 3. Modified Mechanisms (Elliptical Sprocket) In modified mechanism, an elliptical sprocket is at the crank and circular sprocket at the wheel. The main objective of using elliptical sprocket to such a drive can be that the chain becomes alternately loose and tight. From figure, an elliptical sprocket, chosen, the chain becomes loose by 0.8 cm only from its tight condition and sag of only 3 cm is produced by its weight in the span of 49.5 cm. Here an elliptical sprocket of major diameter 24 cm and minor diameter is 12 cm. chosen so as to keep the chain length same. Assuming that the chain speed is constant, the elliptical sprocket will rotate at a higher speed when the transmission angle is poor and will rotate slow when the transmission angle is good. Thus, giving more time to the mechanism for receiving power input. 3) Double Lever Inversion Fig2: Modified Mechanism (Quick Return Ratio = 1) From figure Fig 4. Modified Mechanisms (Double Lever Inversion) From figure, O2A is a crank which does not rotate completely but oscillates. Therefore, O2A is chosen to give sufficient angular displacement and good transmission angle. The lever centre or crank centre O2 was located on the perpendicular bisector of A1A8 so as to give an oscillation angle A1O2 A8 of 700. O1B is thigh length, AB is length, O2 A is crank length, O1 O2 is frame. ISSN: 2231-5381 http://www.ijettjournal.org Page 6 International Journal of Engineering Trends and Technology (IJETT) – Volume 8 Number 1- Feb 2014 In double lever mechanism, lever O2 A is 32 cm long and frame O1 O2 is 58cm at an angle 100 to vertical. Another four bar chain O2 CDO3 is provided in series. This auxiliary four bar chain is a crank lever inversion with crank O3 D rotating and lever O2C oscillating along with O2 A. In addition to timing the lever, oscillates in positions O2A1 to O2 A8 the auxiliary mechanism serves an additional purpose, when lever for one leg is moving down, it moves the lever of another leg upward. The crank O3 D for both the levers is kept 1800 out of phase. The auxiliary mechanism is designed for a quick return ratio less than one to ensure that the two levers of different height do not come to dead centre position at the same time. V. PLANNING OF EXPERIMENTATION The dimensional equation for the process is deduced as follows: such as force exerted on pedal/crank, measuring crank angle w.r.t. frame, measuring angle between pedal w.r.t. ground, Human input energy measurement (R). Modak J.P. and Bapat A.R. (1994) formulated generalized experimental model for flywheel motor [3]. They established the functional relation between the terminal angular velocity (W) and other dependent variable such as moment inertia (I), Gear ratio (G), Human input energy (R), Effectiveness of mechanism (EM). From this functional relation, for a particular time period of oscillation (T), the terminal velocity at the end of pedaling can be determined. [8] Further during experimentation Modak J.P. and Bapat A.R. (1994) also find the variation of terminal velocity (W) with G, I, and EM. Determined the valued of G, I, and EM depending upon the objective of study. Based on the deduced model, the optimum values for the independent parameters for various objective functions can be produced as described in table 3. [3] WT = f [(I/RT2), (ME), (G)] Where, W = Angular Velocity of flywheel in rad/sec reached after time interval T secs., I = moment of inertia of flywheel, Kg-m2 R = energy input by rider, Kgf-m ME = effectiveness of mechanism, ‘M’ G = speed increasing gear ratio 16 f = stands for function of T = peddling time, in second. Table 2 enumerates Test envelope, Test points and Test sequence [11] for every independent P term or parameter which have been worked out Based on earlier findings [1 and 9-10]. It is not possible to estimate Test envelope for (I/RT2) because it is not possible to adjust R for the Given rider. Hence Test envelope for parameter I only am considered. Sr. No. 1. pi Terms Test Envelope Test Sequence ‘I’ Moment of Inertia of Flywheel, kg-m2 0.255 to (for I) 0.255,1.867, 3.48, 1.061, 2.673 2. ‘ME’ Effectiveness of Mechanism “M” 1 to 1.18 Gear Ratio 1.14 to 4.0 3. Eм G I (kg m²) Maximum WT 1 4 0.255 Maximum energy storage 1 4 0.255 Maximum effectiveness 1 2-4 0.255-1.061 Optimized obtaining.. 3.48 for Table 3: Optimized Value Modak J.P. and Bapat A.R. [1] conducted experiments for various combination of moment of inertia (I) & (G) and determined the variation of pedal force (Ft) with position of crank angle. Modak J.P. and Bapat A.R. [1] also found that of moment of inertia (I) of flywheel should not between 1.4 to 2.4 Kg/m2 because during this variation pedal force (Ft) and load torque to overcome has a maximum value. Furthermore in order to minimize frictional losses the gear ratio (G) should be taken 3.8 and moment of inertia (I) should 1.06 Kg/m2. VII. CONCLUSION 1, 1.17, 1.18 1.14, 1.5, 2.0, 1.3 4.0, Table 2 : Test Envelope, Test Points and Test Sequence The different bicycle mechanisms developed by Modak [10] other than existing bicycle mechanism are i) Quick Return Ratio = 1 drive and ii) Double lever mechanism. The Elliptical drive mechanism [14] is also studied. It is found theoretically that effectiveness of Q.R.R.=1 drive, Elliptical drive and Double lever inversion is respectively 17%, 18% and 35% more effective as compared to existing drive from the point of view of rider’s energy utilization [18]. Hence in TABLE 2 the test envelope is Taken as 1 to 1.18 for ME in view of the fact that in the present Investigation only three mechanisms viz. (1) Existing (2) Q.R.R. =1 drive And (3) Elliptical sprocket drive [19] are tried. Double lever inversion, Although should have been tried in spite of the fact that it’s ME value is 1.34 could not be tried at this stage because of it’s mechanical fabrication Complexity. The physical design and fabrication of the experimental set up was then carried out [6 & 7] and the set up was tested for sturdiness, accuracy and smooth running [3]. A procedure is evolved [10] for eliminating the effect of extraneous variables associated with rider like temperament, attitude, day and duration of test etc. on the experiment. VI. OPTIMISATION OF VARIOUS PARAMETERS As the flywheel motor has wide range of applications, it is being constant subject of researchers for the performance improvement of the system through parameter optimization. For this various experimentation is done on the flywheel motor. To determine the various dynamic responses ,Modak J.P. and Bapat A.R.( determine the various dynamic response ISSN: 2231-5381 values Thus the literature survey on flywheel motor is carried out. Initially the human powered flywheel motor was developed for the manufacturing of lime fly ash bricks. later on various applications are developed such as chaff cutter, forge hammers, potter’s wheel etc. Because of its numerous advantages, the flywheel motor is finding the importance in the rural side of developing countries like India. And hence it is necessary to optimize its performance parameters. In an attempt lots of experimental and numerical models are developed which are already discussed. The effect of multiple operators with alteration in the mechanisms such as double lever inversion, quick return ratio=1, and elliptical sprocket can also be analyzed as future work for the human powered flywheel motor. REFERENCES [1] Modak J.P, Bapat A.R. “Various Efficiencies of Human powered flywheel motor” Human power number 54: pp21-23 [2] Modak J.P, Moghe S.D. “Design and development of a Human-Powered machine for the manufacture of Lime-FlashSand Bricks.” Human Power Volume 13 number 2, spring 1998. [3] Modak J.P, Bapat A.R. “formulation of generalized experimental model for a manually driven flywheel motor and its optimization.” Applied ergonomics 1994 Volume 25 Number 2. [4] Modak J.P, “ General consideration of mechanical design for manually driven process machine” NACOMM; 1987; pp 1317. http://www.ijettjournal.org Page 7 International Journal of Engineering Trends and Technology (IJETT) – Volume 8 Number 1- Feb 2014 [5] Modak J.P, Bapat A.R “ Improvement in experimental setup for establishing generalized experimental model of various dynamic responses for manually energized flywheel motor” [6] Modak J.P “design and development of human energized chaff cutter” [7] Modak J.P. , Chandurkar K.C., Singh M.P, Yadpanawar A.G “Experimental verification of various bicycle drive mechanism part1” Proceedings of AMSE conference modeling and simulation Karisurhe west Germeny, july 20-22 1987;pp139160. [8] Modak J.P “Bicycle and its kinematics and modifications”. National conference mach Mech; February 1985; pp5-11. [9] Modak J.P, Bapat A.R. “Formulation of generalized experimental model for manually driven flywheel motor and its optimization” Applied ergonomics; 1994; volume 25; number2; pp 119-122. [10] J. P. Modak, "Bicycle-it's Kinematics and Modifications" Proceedings of National Conference on Machines & Mechanisms, Feb. 1984, pp 5-12. [11] Schenk H. Jr., “Theories of Engineering Experimentation”, McGraw Hill Book.Co., New York, 1961. K Inoue, K Shimada “Solid model reconstruction of wireframe cad models based on topological embeddings of planar graphs” - Journal of Mechanical Design, ISSN:13506501 Vol:223, Pages:1165-1177,June2003.pp273-279. [12] [13] David Gordon Wilson “ Understanding the pedal power” published by VITA 1600 Wilson boulevard; ISBN 0-86619268-9[C];1986. [14] K. V. Chandurkar, et all "Experimental Verification of Various Bicycle DriveMechanisms Part-i". Proceedings of International AMSE Conf., Modelling &Simulation Control, KARLSRUHE (WEST Germany), vol 3-A, July 1987, pp 139-160. [15] A. Tyagrajan, et all "Development of on Load Starting Positive Clutch forFrequent on-off' Proceedings of 3rd IFToMM Speciality Symposium on RotorDynamics, Vibration Control, France. Sept. 1990. Accepted for Presentation. [16] R Bogusch, B Lohmann “Computer-aided process modeling with ModKit from northwestern.edu”- Computers & Chemical, 2001.pp173-179 [17] J Gómez, C Cachero “Conceptual modeling of deviceindependent web applications” - Multimedia, Volume: 8, Issue: 2 IEEE, ISSN: 0278-0046 Jun 2001. pp26 – 3 [18] Murell K. F.H., “Ergonomics, Man in His Working Environment”, Chapman andHall Ltd., London, 1965. [19] William A. Williams, “Mechanical Power Transmission”, Manual, Book Division,Conovex-Mast Publications, Inc., 1953, p 358. BIOGRPHIES. K.K.PADGHAN is M.E. scholar at Prof. Ram Meghe Institute of technology and research Badnera, Maharashtra, India. He is basically Mechanical Engineer from Ram Meghe Institute of technology and research Badnera, Maharashtra, India. Presently he is perusing his post graduation studies from . Ram Meghe Institute of technology and research Badnera, Maharashtra, India. His area of interest is CAD/CAM, Production engineering. Dr. J.P.MODAK is working as Emeritus Professor at Dept. of Mechanical Engineering, Priyadershani C.O.E. Nagpur,India. A.P.NARKHEDKAR is M.E. scholar at Prof. Ram Meghe Institute of technology and research Badnera,Maharashtra, India. He is basically Mechanical Engineer from Jawaharlal Darda Institute of Technology, Yavatmal, India. Presently he is peursing his post graduation studies from . Ram Meghe Institute of technology A.K.PITALE is working as professor at . Ram Meghe Institute of technology and research Badnera,Maharashtra, India. He is basically Mechanical engineer having its post graduation in mechanical engineering. His subject of intrest CAD/CAM, thermal engineering, power engineering, Fluid Mechanics and research Badnera,Maharashtra, India. His area of intrest is CAD/CAM, Production engineering. ISSN: 2231-5381 http://www.ijettjournal.org Page 8