Handy Hand M.V.S.Praveen , K.Vasavi , B.Santosh Sarma
advertisement

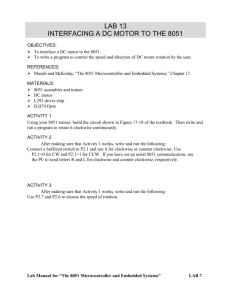
International Journal of Engineering Trends and Technology (IJETT) – Volume 7 Number 3- Jan 2014 Handy Hand M.V.S.Praveen#1, K.Vasavi*2, B.Santosh Sarma#3 # Student & Electronics and Instrumentation & GITAM University Visakhapatnam, Andhra Pradesh, India Abstract—Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots and computer systems for their control, sensory feedback, and information processing. The word ‘Robotics’ means the study of robots was coined by Isaac Asimov. Robotics involves elements of mechanical and electrical engineering, as well as control theory, computing and now artificial intelligence. Robotics technology has matures to a point where these have many research and industrial application. Robots have been used to replace people in production line and are ideally suited for repetitive work. The Robot Institute of America defines a robot as “A Programmable multifunctional manipulator designed to move material, parts and tools of specialized device through variable programmed of variety of tasks”. So we made a robotic hand called “HANDY HAND” which is attached to handicap people. The essential part of the robotic arm is relay based brick capable of driving a DC Motor and IR sensors. This paper explains the method of interfacing the robotic hand with DC motors, relays and IR sensor which can grab and release less weight objects without any programming. Keywords—DC Motors, IR Sensors, Relay, LIMIT Switch, LITHIUM ION POLYMER Battery. I. INTRODUCTION A branch of technology that deals with a robot is Robotics. A robotics is a mechanical or virtual intelligent agent that can perform tasks automatically or with guidance, typically by remote controlled. In practice a robot is usually an electro mechanical machine that is guided by computer, and electronic programming robot can autonomous or semi autonomous. The word robot first appeared in the play Rossum’s universal robots by the Czech writer Karelcapek in 1920.Robots are used in an increasingly wide variety of tasks such as vacuuming floors, mowing lawns, cleaning drains, building cars, in warfare, in tasks that are too expensive or too dangerous to be performed by humans such as exploring outer space or at the bottom of the sea. Robots range from humanoids, military robots, mobile and servicing robots. There is no consensus on which machines qualify as robots but there is general agreement among experts, and the public, that robot tend to do some of the tasks such as move around, operate a mechanical limb, sense and manipulate their environment, and exhibit intelligent behavior especially which mimics human or other animals. There is no particular ISSN: 2231-5381 definition of a robot. According to the Encyclopedia Britannica robot is “any automatically operated machine that replaces human effort, though it may not resemble human being in appearance or perform functions in a human like manner”. Merriam Webster describes a robot as a “mechanical that looks like a human being and performs various complex acts (as waling or talking )of a human being”, or a “device that automatically performs complicated often repetitive tasks”, or a “mechanism guided by automatic controls”. So based on these criteria we inspired to make a robot which is helpful for handicap people. The main task is to open and close the hand via motor by using relay and IR sensor. It is a mechanical robotic arm which is functioned by sensors, with similar functions to a human arm. II. SYSTEM ANALYSIS The main objective of this robot is to help the handicap people by fixing a robotic arm. This robotic arm is mainly controlled by the TR sensors via DC motor by stretchable fingers which can bend easily. And it completely looks like a Human Hand. A. BLOCK DIAGRAM 8051 SENSOR- LIMIT SWITCH Micro SENSOR2 RELAY Control ler DC MOTOR Fig.1 Block diagram of Handy Hand The above block diagram shows the overall co-ordination of the robot. The robot structure consists of motors, relay circuits i.e. dual coil 12v dc relay board and IR sensors. Two IR sensors are used. Whenever the voltage enters into the motor, the sensors senses and rotates in clockwise direction for closing purpose and in anticlockwise direction for opening purpose. http://www.ijettjournal.org Page 148 International Journal of Engineering Trends and Technology (IJETT) – Volume 7 Number 3- Jan 2014 A. Dallas Semi/Maxim HARDWARE REQUIRED 8051 Microcontroller IR Sensors (Infra Red Sensor) Relays LIMIT Switch DC Motor This robot is built with P89V51RD2 microcontroller which manufactured from Philips Company. The 8051 is an 8-bit processor, meaning that the CPU can work on only 8 bits of data at a time. Data larger than 8 bits has to be broken into 8-bit pieces to be processed by the CPU. The 8051 is also referred as “system on chip”. B. SOFTWARE REQUIRED EXT INTERRUPTS Embedded C programming Keil C compiler Flash Magic On chip ROM for progra m code INTERRUPT CONTROL III. HARDWARE DESCRIPTION ETC On chip RAM TIMER 1 CPU A. 8051 MICROCNTROLLER A microcontroller is a small, low-cost and self contained computer-on-a-chip that can be used as an embedded system. A few microcontrollers may utilize four-bit expressions and work at clock rate frequencies, which usually include: BUS CONTROL OSC 4 I/O PORTS P0 P1 P2 P3 An 8 or 16 bit microprocessor. A little measure of RAM. Programmable ROM and flash memory. Parallel and serial I/O. Timers and signal generators. Analog to Digital and Digital to Analog conversion 8051 Family AVR microcontroller Family PIC microcontroller Family ARM Family Intel Atmel Philips Infineon ISSN: 2231-5381 TXD RXD The 8051 has following features. They are: TABLE 1: FEATURES OF 8051 FEATURES QUANTITY ROM 4K bytes RAM 128 bytes I/O PORTS 32 TIMERS 2 SERIAL PORT 1 INTERRUPT SOURCES 6 There are minimum six requirements for proper operation of microcontroller. Those are: In 1981, Intel Corporation introduced an 8-bit microcontroller called the 8051.The 8051 family has largest number of diversified (multiple sources) suppliers, which were originated by Intel, and several companies which include: SERIAL PORT Fig 2. 8051 microcontroller Block diagram Microcontrollers usually must have low-power requirements since many devices they control are batteryoperated. Microcontrollers are used in many consumer electronics, car engines, and computer peripherals and test or measurement equipment. And these are well suited for long lasting battery applications. The dominant parts of microcontrollers being used now a day are implanted in other apparatus. There are many types of micro controller families that are available in the market. Those are: TIMER 0 Power supply section Pull-ups for ports (it is must for PORT0) Reset circuit Crystal circuit ISP circuit (for program dumping) EA/VPP pin is connected to VCC. PORT0 is open collector that’s why we are using pull-up resistor which makes PORT0 as an I/O port. Reset circuit is used to reset the microcontroller. Crystal circuit is used for the http://www.ijettjournal.org Page 149 International Journal of Engineering Trends and Technology (IJETT) – Volume 7 Number 3- Jan 2014 microcontroller for timing pluses. In this project we are not using external memory that’s why EA/VPP pin in the microcontroller is connected to VCC that indicates internal memory is used for this application. It is a 40pin microcontroller with VCC of 5V connected to pin 40 and VSS at pin 20 which is kept 0V. And there are input and output ports from P1.0 – P1.7 and which having open drain feature. Port3 has got extra features. Pin36 has open drain condition and pin17 has internally pulled up transistor inside the microcontroller. When we apply logic 1 at port1 then we get logic 1 at port21 and vice versa. The programming of microcontroller is dead complicate. Basically we write a program in C language which is next converted to machine language understand by the microcontroller. A RESET pin is connected to pin9, connected with a capacitor. When the switch is ON, the capacitor starts charging and RST is high. Applying a high to the reset pin resets the microcontroller. If we apply logic zero to this pin, the program starts execution from the beginning. Fig 3. IR SENSOR The basic idea is to make use of IR LEDS to send the infrared waves to the object. Another IR diode of the same type is to be used to detect the reflected wave from the object. The diagram is shown below. B.IR SENSORS A Sensor converts the physical parameter (for example: temperature, blood pressure, humidity, speed, etc) into a signal which can be measures electrically. Sensors are sophisticated devices that are frequently used to detect and respond to electrical or optical signals. There are certain features which have to be considered when we choose a sensor. There are: Accuracy Environment condition-usually has limits for temperature/humidity Range-Measurement limit or sensor Calibration- Essential for most of the measuring devices as the readings changes with time. Resolution- Smallest increment detected by the sensor Cost Repeatability- The reading that varies is repeatedly measured under the same environment. Fig 4 Basic Idea of IR Sensor The transmitter part of the sensor is an Infrared (IR) Led which transmits continuous IR rays to be received by an IR receiver. The output of the receiver varies depending upon its reception of IR rays. Since this variation cannot be analyzed as such, therefore this output can be fed to a comparator. Here operational amplifier (op-amp) of LM358 is used as comparator. When the IR receiver does not receive signal the potential at the inverting input goes higher than that at non-inverting input of the comparator. Thus the output of the comparator goes low and LED does not glow. When the IR receiver receives signal the potential at the inverting input goes low. Thus the output of the comparator goes high and the LED starts glowing. C. RELAYS Some commonly used sensors along with their principle and applications are temperature sensors, IR sensor, and UV sensor. In order to fulfill our requirement, IR sensor is required. IR sensor devices detect infrared wavelengths, or light made up of electronic radiation with wavelength between 0.7 to 1000 microns, a system of measurement equal to one millionth of a meter. This wavelength range makes up the infrared band, which emits radiation temperatures detectable by IR sensors. ISSN: 2231-5381 Relay is an electromagnetic device which is used to isolate two circuits electrically and connect them magnetically. They are very useful devices and allow one circuit to switch another one while they are completely separate. They are often used to interface an electronic circuit (working at a low voltage) to an electrical circuit which works at very high voltage. For example, a relay can make a 5V DC battery circuit to switch a http://www.ijettjournal.org Page 150 International Journal of Engineering Trends and Technology (IJETT) – Volume 7 Number 3- Jan 2014 230V AC mains circuit. Thus a small sensor circuit can drive, say, a fan or an electric bulb. placed. The door, when gets fully opened, will depress the limit switch lever and thus the control circuit of motor becomes incomplete and the motor stops. E. LIPO BATTERY Lithium-ion polymer batteries (LIPO) are rechargeable batteries. LIPO batteries are usually composed of several identical secondary cells in parallel to increase the discharge current capability. They offer high discharge rates and a high energy storage/weight ratio. Fig 5 Basic circuit of Relay These device is consist of a coil of wire is covered with an iron core. When electricity is applied to a V1 & V2 means coil of wire it becomes magnetic, hence the term electro magnet. The A, B & C terminals are SPDT Switch controlled by an electro magnet. When electricity is applied to v1 & v2, the electromagnet acts upon the SPDT switch so that the B, C terminals are connected. When the electricity is disconnected, then A, C terminals are connected. If electricity is disconnected, some current is present in that coil. During turn off the reverse EMF doesn’t worked means, we are using flywheel diode. This diode doesn’t allow the current in the previous block. D. LIMIT SWITCH Fig 7. LITHIUM ION POLYMER F. ACRYLIC SHEET Acrylic sheet is a material with unique physical properties and performance characteristics. It weighs half as much as the finest optical glass yet is equal to it in clarity and is up to 17 times more impact resistant. Acrylic sheet is made in over 250 colors, in thickness from 0.30 to 4.25 and can transmit ultraviolet light or filer it out, as required. A mechanical Limit Switch interlocks a mechanical motion or position with an electrical circuit. A good starting point for limit switch selection is contact arrangement. The most common limit switch is the single-pole contact block wit one NO and one NC set of contacts. However, limit switches are available with up to four poles. Fig 8. Acrylic Sheets G. FIRM PLASTIC Fig 6. LIMIT SWITCH A limit switch is an electromechanical device. It is placed in the control circuitry of a machine system. For example-A motor is used to open a door. At the end of the door, a limit switch is ISSN: 2231-5381 Plastic sheeting is the popular substitute for still in global market. Plastic sheets are very firm and strong to accommodate all tasks, from house furniture t roofing purpose. So we used firm plastic for covering the side body parts with thickness of 4mm,it looks like a fabricated . http://www.ijettjournal.org Page 151 International Journal of Engineering Trends and Technology (IJETT) – Volume 7 Number 3- Jan 2014 H. SURGICAL BAND We used the surgical band for stability for elbow joint range of motion usually remains near normal. This orthopedically designed support is an innovative and unique device, scientifically designed to air in the relief and prevention of pain. A project manager A make facility Tool configuration Editor A powerful debugger I. DC MOTORS An electric motor is an electromechanical device that converts electrical energy into mechanical energy. Most electric motors operate through the interaction of magnetic fields and current carrying conductors to generate force. A DC motor is an electric motor that runs on direct current (DC) electricity. DC motors were used to run machinery, often eliminating the need for a local steam engine or internal combustion engine. Dc motors can operate directly from rechargeable batteries, providing the motive power for the first electric vehicles. Fig. 10 IDE Window C. Flash Magic: Flash Magic is a tool which used to program hex code in EEPROM of micro-controller. It is a freeware tool. It only supports the micro-controller of Philips and NXP. You can burn a hex code into those controllers which supports ISP (in system programming) feature. Fig 9. DC MOTOR DC motors are found in applications as small as toy and disk drives, or in large sizes to operate still rolling mills and paper machines. Modern Dc motors are nearly always operated in conjunction with power electronic devices. IV.SOFTWARE REQUIREMENT A. Kiel-C Compiler: Many companies provide the 8051 assembler, some of them provide shareware version of their product on the Web, Kiel is one of them. We can download them from their Websites. However, the size of code for these shareware versions is limited and we have to consider which assembler is suitable for our application. B. Kiel U Vision2: This is an IDE (Integrated Development Environment) that helps you write, compile, and debug embedded programs. It encapsulates the following components: ISSN: 2231-5381 Fig. 11. Flash Magic Window V. HANDY HAND OPERATION There will be a two sensors, one is at centre, and another facing towards the bottom of the hand. After completion of first sensor task, the second sensor performs its task. And as we know that the black object is for attracting and white object is for reflecting, based on this principle the complete http://www.ijettjournal.org Page 152 International Journal of Engineering Trends and Technology (IJETT) – Volume 7 Number 3- Jan 2014 sensors works. The entire operation is made on relay board, digital IC circuits Fig 13.CIRCUIT DIAGRAM Fig 12. FLOW CHART A motor is DC motor of 1kg torque and 100 rpm. When power supply is ON, motor remains constant. When we place an object over the first sensor i.e.S1,it gets sense (S1=1), and the motor rotates in anticlockwise direction and hand will close. If it doesn’t sense, the motor mechanism remains in constant. While closing an object, the limit switch gets triggered (Switch=1) and hence the motor gets stop. When placing the object, the second sensor i.e.S2 get sense (S2=1), the motor rotates in clockwise direction and hand opens. If it doesn’t sense the motor remains constant. Threading mechanism is used for closing and opening the hand. The whole operation is performed by 12V relay circuit board which can operate several circuits with one signal by giving power supply from LIPO battery which has high charge and less weight ratio. A relay consists of 5 terminals-VCC, GND, Normal open (NO),Normal Close(NC) and Common(C).For rotation of motor in both clockwise and anticlockwise direction, we require two relays. The common terminals of both the relays are connected to the motor polarities. The NC and NO terminals of second relay is given power supply. The NC and NO terminals of first relay is connected to the limit switch. The limit switch allows the hand to hold the object perfectly. It has three terminals NC, COMMON(C), NO. Normal close (NC) is connected to the first relay NC terminal and common is given to power supply. Whenever the limit switch is triggered, the first relay gets stopped and the motor stops to rotate in one direction. VI. RESULTS A. SIDE VEIW OF HANDY HAND A. CIRCUIT DIAGRAM The above circuit diagram shows the basic operation of Handy hand, which has IR sensors, relay, motor and limit switch. IR sensors always emit the light. It consists of transmitter and receiver. When we place an object or any obstacle near the transmitter, it get reflected and received by the receiver. The output of the sensor is high and it is given to the relay. ISSN: 2231-5381 Fig 14. Side view of Handyhand This is the side view of the arm which consists of a surgical band so that it gives the stability to the arm. This arm is very flexible and secure to the people who use it and it is covered with complete firm plastic. http://www.ijettjournal.org Page 153 International Journal of Engineering Trends and Technology (IJETT) – Volume 7 Number 3- Jan 2014 B. CLOSING THE OBJECT inconvenient and increased the design cost and development period. Our future work includes the implementation of additional applications, the refinement of our implementation, especially using the solar panels, we can develop voltage by own due to thermal energy. And using the IR proximity sensors we can further reduce the complexity of circuits. We see a lot of people who are born without hands. They may have one hand or not even that. These handicap people have to face many problems while doing their tasks. So, with our “HANDY HAND” arm we can help the handicap people with low price. The main advantage is we don’t need any surgery to nervous system. Fig 15. Closing the object The figure shows the image of catching the object, when closing, the limit switch gets triggers and stops the motor rotation. C. RELEASING OBJECT VIII. REFERNCES [1]. Muhammad Ali Mazidi and Janice Gillispie Mazidi, the 8051 Microcontroller and Embedded Systems by, Pearson Education. [2]. Kenneth B. Rexford and Peter R. Giuliani (2002).Electrical control of machines (6th ed.). Cengage Learning .p. 58. ISBN 978-0-7668-6198-4. [3]. Wikipedia.org/wiki/relay [4]. Reusch, William (1999).”Infrared Spectroscopy”. Michigan State Univesity.Retrieved 2006-10-27. [5]. Rchelicopterfun.com/rc-lipo-batteries.html [6]. “Toshiba to Launch Innovative Rechargeable Battery Business” (Press release). Toshiba. 11 December 2007.Retrieved 25 June 2009 Fig 16. Releases the object When the second sensor senses the motor rotate in anti clockwise direction, then the motor releases the object. VII. CONCLUSION AND FUTURE SCOPE In this design, we used Philips 8051 microcontroller and Keil C - Compiler helped us see the powerful design technologies of software and hardware systems. Most traditional circuit designs are composed of hardware components building on a printed circuit board (PCB), we used same. If errors are found or the system needs to be improved or upgraded, the PCB must be redesigned. Adjusting and modifying the PCB is very ISSN: 2231-5381 http://www.ijettjournal.org Page 154