Impact of Wind Fluctuations on Frequency Dynamics and Robust Control for Ensuring Frequency Specifications
advertisement

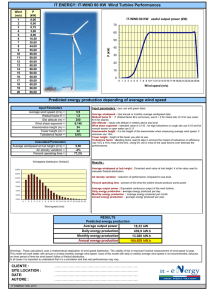
Impact of Wind Fluctuations on Frequency Dynamics and Robust Control for Ensuring Frequency Specifications Robust Control for Ensuring Frequency Specifications Juhua Liu, Bruce Krogh, Marija Juhua Liu Bruce Krogh Marija Ilic Electrical and Computer Engineering Carnegie Mellon University March 11, 2009 http://en.wikipedia.org/wiki/File:50Hz60Hz.svg Accommodating Wind Generation Accommodating Wind Generation Variability, Intermittency Less forecast accuracy In general not dispatchable Reduces system inertia y Creates burden on the traditional p plants to maintain system y performance http://windturbine‐corp.com What is the impact p of wind g generation on p primary y frequency q y control (seconds to 1 min)? 2 Frequency Performance Specifications Frequency Performance Specifications Normal Conditions: 59.95Hz – 60.05Hz [1] Load used as a resource ERCOT threshold: 59.7Hz for 20 cycles Under‐frequency frequency load shedding (for contingency) load shedding (for contingency) Under ERCOT threshold: 59.4Hz, shed 5% load Future performance criteria may be different [1] B. Kirby et al., Frequency Control Concerns In The North American Electric Power System, Dec 2002. 3 Motivating Example Motivating Example [ ] Modified WSCC 9‐Bus System[2] [2] P. W. Sauer and M. A. Pai, Power System Dynamics and Stability. Prentice Hall, New Jersey, 1998. 4 50% Wind Penetration 50% Wind Penetration Same amount of load; half of the traditional generation is replaced by wind generation 5 Load wind generation scenario Load‐wind generation scenario Power (MW) 350 300 Total Load Power Total Load Power 250 200 150 Total Wind Power 100 50 0 0 2 4 6 8 10 12 Time (Sec) 14 16 18 20 6 Impact of Wind Generation Impact of Wind Generation Frequency q y ((Hz)) 60 4 60.4 60.2 60 0% wind penetration 59.8 59.6 50% wind penetration 59.4 0 2 4 6 8 10 12 Time (Sec) 14 16 18 20 7 Robust Control for Frequency Regulation Robust Control for Frequency Regulation M Measures must be taken to ensure frequency b k f performance under normal conditions storage t advanced wind turbine control advanced traditional plant (governor) control d d di i l l ( ) l demand response, etc. Initial approach: Use H∞ control theory to design controllers for the traditional plants ll f h di i l l 8 The H∞ Approach The H Fi Find a stabilizing controller K that d t bili i t ll K th t minimizes the sensitivity from ‘w’ to ‘z’ to z Advantages satisfies performance specifications p p optimizes tradeoff between performance and control effort can easily incorporate model/parameter uncertainty mature software for design mature software for design Disadvantage can lead to high‐order order controllers, but effective model controllers but effective model can lead to high reduction techniques exist 9 2 bus Example 2‐bus Example Wind Power (MW) 250 200 150 100 50 0 0 2 4 6 8 10 12 Time (Sec) 14 16 18 20 10 Traditional vs H∞ controllers Traditional vs. H Frequency (Hz) 60 4 60.4 60.2 60 With H inf Controller 59.8 59.6 With Traditional Governor 59.4 0 2 4 6 8 10 12 Time (Sec) 14 16 18 20 11 Mechanical Power Mechanical Power Mechanical Power (MW) 250 200 With H inf Controller 150 With Traditional With Traditional Governor 100 50 0 0 2 4 6 8 10 12 Time (Sec) 14 16 18 20 12 Current Research Current Research Decentralized control design Investigation of alternative control actions Demand response Gas‐turbines Storage devices Coordination with load Coordination with load‐frequency frequency control (AGC) control (AGC) Implications for system frequency specifications 13 Acknowledgments Joint work with Professors Bruce Krogh and Marija Ilic Supported by the National Science Foundation Information Technology Research (ITR) program, grant No. CNS‐0428404. 14