The Thomsen model of inserts in sandwich composites: An evaluation
advertisement

The Thomsen model of inserts in sandwich composites: An
evaluation
arXiv:1009.5431v1 [cond-mat.mtrl-sci] 28 Sep 2010
Biswajit Banerjee∗and Bryan Smith†
Industrial Research Limited
24 Balfour Road, Parnell, Auckland, New Zealand
September 28, 2010
Abstract
A one-dimensional finite element model of a sandwich panel with insert is derived using the
approach used in the Thomsen model. The one-dimensional model produces results that are
close to those of a two-dimensional axisysmmetric model. Both models assume that the core is
homogeneous. Our results indicate that the one-dimensional model may be well suited for small
deformations of sandwich specimens with foam cores.
1
Introduction
The numerical simulation of complicated sandwich structures containing inserts can be
computationally expensive, particularly when a statistical analysis of the effect of variable input
parameters is the goal. Simplified theories of sandwich structures provide a means of assessing the
adequacy of the particular statistical technique that is of interest.
Theories of sandwich structures can be broadly classified into the following types:
• First-order theories (see for example, [1]).
• Higher-order linear theories that do not account for thickness change (see for example [2] and
references therein).
• Geometrically-exact single-layer nonlinear theories that do not account for thickness change
(see for example, [3]).
• Higher-order linear single-layer theories that account for thickness change (see for example,
[4, 5, 6]) .
• Higher-order linear multi-layer theories that account for thickness change (see for example,
[7, 8, 9, 10, 11]) .
• Higher-order nonlinear single-layer theories that account for thickness change (see for
example, [12, 13, 14, 15, 16]).
∗
†
Corresponding author, email: b.banerjee@irl.cri.nz
email: bryan.smith@irl.cri.nz
1
2
THE THOMSEN MODEL
Most theories start with ad-hoc assumptions about the displacement or stress field.
Geometrically-exact theories avoid such assumptions but are hampered by the requirement that
special constitutive models have to be designed for consistency. The linear theory proposed by
Thomsen and co-workers [7, 8, 9] provides a formulation that is simple enough to be evaluated
rapidly. Therefore, we have chosen that formulation and applied it to an axisymmetric sandwich
panel in this work. The work of Thomsen involves the solution of a system of first order ordinary
differential equations using a multi-segment numerical method, We have instead chosen to use the
considerably simpler finite element method to discretize and solve the system of equations.
2
The Thomsen Model
Since we are considering a simplified axisymmetric form of the sandwich panel problem, we start
with the governing equations expessed in cylindrical coordinates. The geometry of the sandwich
structure under consideration is shown in Figure 1.
z
θ
2f
top
2c
2f
Facesheet
zc
Core
r
bot
Facesheet
Figure 1 – The geometry of the sandwich panel.
2.0.1
Strain-displacement
The strain-displacement relations are given by
=
1
∇u + (∇u)T
2
(1)
In cylindrical coordinates we have
εrr
εrθ
1 ∂uθ
∂ur
∂uz
=
; εθθ =
+ ur ; εzz =
∂r
r ∂θ
∂z
"
"
#
#
1 ∂ur
1 ∂uz
1 ∂uθ
1 ∂uθ
1 ∂ur
∂uz
=
+
− uθ
; εθz =
+
; εrz =
+
2 ∂r
r ∂θ
2 ∂z
r ∂θ
2 ∂z
∂r
(2)
Axisymmetry implies that the displacement uθ = uθ (r) and all derivatives with respect to θ are zero.
If in addition, the displacements are small such that uθ = C r (this assumption is not strictly
necessary), the strain-displacement relations reduce to
ur
∂ur
∂uz
; εθθ =
; εzz =
∂r
r
∂z
1 ∂ur
∂uz
= 0 ; εrz =
+
; εrθ = 0
2 ∂z
∂r
εrr =
εθz
2
(3)
2.1
2.0.2
Facesheet equations
2
THE THOMSEN MODEL
Stress-strain
The stress-strain relations for an orthotropic material are
σ=C:
(4)
In cylindrical coordinates
σrr
C11 C12 C13 0
0
0
εrr
σθθ C12 C22 C23 0
εθθ
0
0
σzz C13 C23 C33 0
0
0
=
εzz =
σθz 0
0
0 C44 0
0
εθz
σrz 0
0
0
0 C55 0
εrz
σrθ
0
0
0
0
0 C66
εrθ
(5)
From axisymmetry, we therefore have
σrr = C11 εrr + C12 εθθ + C13 εzz
σθθ = C12 εrr + C22 εθθ + C23 εzz
σzz = C13 εrr + C23 εθθ + C33 εzz
(6)
σθz = 0 ; σrz = C55 εrz ; σrθ = 0
2.0.3
Equilibrium
We assume that there are no inertial or body forces in the sandwich panel. Then the
three-dimensional equilibrium equations take the form
∇·σ =0
(7)
The equilibrium equations in cylindrical coordinates are
1 ∂σrθ
∂σrr
+
+ (σrr − σθθ ) +
∂r
r ∂θ
1 ∂σθθ
∂σrθ
+
+ 2σrθ +
∂r
r ∂θ
1 ∂σθz
∂σrz
+
+ σrz +
∂r
r ∂θ
∂σrz
=0
∂z
∂σθz
=0
∂z
(8)
∂σzz
=0
∂z
Because of axisymmetry, all derivatives with respect to θ are zero and also σθz and σrθ are zero, the
reduced equilibrium equations are
1
∂σrr
+ [σrr − σθθ ] +
∂r
r
1
∂σrz
+ σrz +
∂r
r
2.1
∂σrz
=0
∂z
∂σzz
=0
∂z
(9)
Facesheet equations
The facesheets are modeled using the Kirchhoff-Love hypothesis, i.e., that transverse normals
remain straight and normal and that the normals are inextensible. In that case, the displacement field
3
2.1
Facesheet equations
2
THE THOMSEN MODEL
in the plate takes the form:
ur (r, θ, z) = u0r (r, θ) − z
∂w0
∂w0
; uθ (r, θ, z) = u0θ (r, θ) − z
; uz (r, θ, z) = w0 (r, θ) (10)
∂r
∂θ
where u0r is the displacement of the midsurface in the r-direction, u0θ is the displacement of the
midsurface in the θ-direction, and w0 is the z-direction displacement of the midsurface.
We define the stress resultants and stress couples as
Z
f
Nrr :=
Z
f
σrr dz ; Nθθ :=
−f
Z
f
σθθ dz ; Mrr :=
−f
Z
f
z σrr dz ; Mθθ :=
−f
z σθθ dz
(11)
−f
where the thickness of the plate is 2f .
2.1.1
Strain-displacement relations
From axisymmetry, the strain-displacement relations are (for small rotations, i.e., NOT the von
Karman strains)
ur
∂ur
∂uz
1 ∂ur
∂uz
εrr =
; εθθ =
; εzz =
; εθz = 0 ; εrz =
+
; εrθ = 0
(12)
∂r
r
∂z
2 ∂z
∂r
Plugging in the displacement functions in the strain-displacement relations gives
d2 w0
u0r z dw0
du0r
−z
; εθθ =
−
; εzz = 0
2
dr
dr"
r # r dr
dw0 dw0
1
−
+
= 0 ; εrθ = 0
= 0 ; εrz =
2
dr
dr
εrr =
εθz
(13)
To simplify the notation, we define
du0r
d2 w0
; ε1rr (r) := − 2
dr
dr
u
1
dw0
0r
ε0θθ (r) :=
; ε1θθ (r) := −
r
r dr
(14)
εrr (r, z) = ε0rr (r) + z ε1rr (r) ; εθθ (r, z) = ε0θθ (r) + z ε1θθ (r)
(15)
ε0rr (r) :=
to get
2.1.2
Stress-strain relations
Assuming that the facesheets are transversely isotropic and taking into account the
strain-displacement relations (13), the axisymmetric stress-strain relations are
σrr = C11 εrr + C12 εθθ ; σθθ = C12 εrr + C11 εθθ ; σzz = C13 εrr + C13 εθθ
σθz = 0 ; σrz = 0 ; σrθ = 0
(16)
Using the definitions in (14) the stress-strain relations reduce to
σrr = C11 ε0rr + z C11 ε1rr + C12 ε0θθ + z C12 ε1θθ
σθθ = C12 ε0rr + z C12 ε1rr + C11 ε0θθ + z C11 ε1θθ
σzz = C13 ε0rr + z C13 ε1rr + C13 ε0θθ + z C13 ε1θθ
4
(17)
2.1
Facesheet equations
2
THE THOMSEN MODEL
If we make the plane stress assumption, σzz = 0, then we have
εrr = −εθθ .
(18)
Then the relations between the stress resultants and stress couples and the strains are
Z
f
Z
f
εθθ dz
εrr dz + C12
Nrr = C11
−f
Z f
−f
Z f
εrr dz + C11
Nθθ = C12
εθθ dz
−f
Z f
−f
Z f
zεθθ dz
zεrr dz + C12
Mrr = C11
−f
Z f
−f
Z f
zεθθ dz
zεrr dz + C11
Mθθ = C12
(19)
−f
−f
From the expressions for strain in equations (15)
Z
Z
f
−f
f
−f
f
εrr (r, z) = 2f ε0rr (r) ;
Z
εθθ (r, z) = 2f ε0θθ (r) ;
Z
z εrr (r, z) =
−f
f
2f 3 1
ε (r)
3 rr
2f 3 0
z εθθ (r, z) =
ε (r)
3 θθ
−f
Therefore, the relations between the stress resultants and stress couples and the strain can be
expressed in matrix form as
Nrr
A11 A12 ε0rr
=
Nθθ
A12 A11 ε0θθ
and
Mrr
D11 D12 ε1rr
=
Mθθ
D12 D11 ε1θθ
(20)
(21)
(22)
where Aij = 2f Cij are the extensional stiffnesses of the plate and Dij = 2f 3 /3 Cij are the bending
stiffnesses of the plate.
2.1.3
Equilibrium equations
The plate equilibrium equations may be derived directly from the three-dimensional equilibrium
equations. However, it is more informative to derive them from the principle of virtual work
δU = δVext
(23)
where δU is a variation of the internal energy and δVext is a variation of the work done by external
forces.
The variation in the internal energy is given by
Z
Z
f
δU =
[σrr δεrr + σθθ δεθθ ] dz dΩ0
Ω0
−f
5
(24)
2.1
Facesheet equations
2
THE THOMSEN MODEL
where Ω0 represents the reference surface of the plate. In terms of the definitions in (14),
Z
Z
f
δU =
−f
Ω0
σrr δε0rr + z σrr δε1rr + σθθ δε0θθ + z σθθ δε1θθ dz dΩ0
(25)
The definitions in (11) give
Z
Nrr δε0rr + Mrr δε1rr + Nθθ δε0θθ + Mθθ δε1θθ dΩ0
δU =
(26)
Ω0
Expanding out the strains in terms of the displacements, we have
#
Z "
dδu0r
d2 δw0 Nθθ
Mθθ dδw0
dΩ0
δU =
Nrr
− Mrr
+
δu0r −
dr
dr2
r
r
dr
Ω0
(27)
Integration by parts leads to,
1d
(r Nrr ) δu0r dΩ0
Γ0
Ω0 r dr
Z
Z
I
dδw0
dδw0
1d
Nθθ
−
nr Mrr
dΓ0 +
(r Mrr )
dΩ0 +
δu0r dΩ0
dr
dr
Γ0
Ω0 r dr
Ω0 r
Z
I
1 dMθθ
Mθθ
δw0 dΓ0 +
δw0 dΩ0
−
nr
r
Ω0 r dr
Γ0
I
δU =
Z
nr Nrr δu0r dΓ0 −
keeping in mind that
I
Z
Z Z
Z rb
r dθ ;
(•) dΩ0 =
(•) r dr dθ
(•) dΓ0 =
(•)
Γ0
θ
Ω0
ra
θ
(28)
(29)
r
Let us define
β :=
dw0
.
dr
(30)
Then
I
δU =
nr
Nrr δu0r − Mrr
Z
1
r
Γ0
−
Ω0
"
Mθθ
δβ −
δw0
r
!
d
(rNrr ) − Nθθ
dr
!
dΓ0
d
dMθθ
δu0r − (rMrr ) δβ −
δw0
dr
dr
(31)
#
dΩ0
To remove the derivative of w0 inside the area integral we integrate again by parts to get
"
!
#
I
1 d
δU =
nr Nrr δu0r − Mrr δβ +
(rMrr ) − Mθθ δw0 dΓ0
r dr
Γ0
"
!
!
#
Z
1
d
d2
dMθθ
−
(rNrr ) − Nθθ δu0r +
(rMrr ) −
δw0 dΩ0
dr
dr2
dr
Ω0 r
6
(32)
2.1
Facesheet equations
2
THE THOMSEN MODEL
The variation in the work done by the external forces is
Z
[q(r) δw0 + s(r) (δu0r − zf δβ) + p(r) δu0θ ] dΩ0
δVext =
Ω0
I
Z
(33)
f
[tr (δu0r − z δβ) + tθ δu0θ + tz δw0 ] dz dΓ0
+
Γ0
−f
where q(r) = q Top Face (r) + q Bot Face (r) is a distributed surface force (per unit area) acting the
positive z direction, p(r) = pTop Face (r) + pBot Face (r) is a distributed surface force (per unit area)
acting the positive r direction, s(r) = sTop Face (r) + sBot Face (r) is a distributed surface force (per
unit area) acting the positive θ direction, zf takes the value +f at the top of the facesheet and −f at
the bottom of the facesheet, and t = tr er + tθ eθ + tz ez is the surface traction vector.
A schematic of the loads thare are applied to the facesheet is shown in Figure 2.
z
q(r)
r
Facesheet
s(r)
q(r)
Figure 2 – The loads on a facesheet.
In terms of resultants over the thickness of the plate
Z
δVext =
[q(r) δw0 + s(r) δu0r − zf s(r) δβ + p(r) δu0θ ] dΩ0
Ω0
I
+
[Nr δu0r − Mr δβ + Nθ δu0θ + Qz δw0 ] dΓ0
(34)
Γ0
where
Z
f
Nr :=
Z
f
tr dz ; Nθ :=
−f
Z
f
tθ dz ; Qz :=
−f
Z
f
tz dz ; Mr :=
−f
z tr dz
Integrating the δβ term by parts over the area Ω0 gives
#
)
Z "(
zf d
δVext =
q(r) +
(rs) δw0 + s(r) δu0r + p(r) δu0θ dΩ0
r dr
Ω0
I
+
[Nr δu0r − Mr δβ + Nθ δu0θ + {Qz − nr zf s(r)} δw0 ] dΓ0
Γ0
7
(35)
−f
(36)
2.1
Facesheet equations
2
THE THOMSEN MODEL
Then, from the principle of virtual work, we have
I (nr Nrr − Nr ) δu0r − (nr Mrr − Mr ) δβ − Nθ δu0θ
0=
Γ0
(
#
!
)
nr
d
+
(rMrr ) − Mθθ − Qz + nr zf s(r) δw0 dΓ0
r
dr
!
Z "
1d
Nθθ
−
(rNrr ) −
+ s(r) δu0r + p(r) δu0θ
r dr
r
Ω0
#
!
1 dMθθ
zf d
1 d2
(rMrr ) −
+ q(r) +
(rs) δw0 dΩ0
+
r dr2
r dr
r dr
(37)
Because of the arbitrariness of the virtual displacements, we have
!
Z
I
1d
Nθθ
(nr Nrr − Nr ) δu0r dΓ0
(rNrr ) −
+ s(r) δu0r dΩ0 =
r dr
r
Ω0
Γ0
Z
I
p(r) δu0θ = −
Nθ δu0θ dΓ0
Ω0
Γ0
!
!
Z
I 1 d2
1 dMθθ
zf d
nr
d
(rMrr ) −
+ q(r) +
(rs) δw0 =
(rMrr ) − Mθθ
r dr2
r dr
r dr
r
dr
Ω0
Γ0
− Qz + nr zf s(r) δw0
− (nr Mrr − Mr ) δβ dΓ0
(38)
Invoking the fundamental lemma of the calculus of variations (and keeping in mind that the
displacement variations and the applied tractions are zero at points on the boundary where
displacements are specified), we get the governing equations for the axisymmetric plate:
1 d(rNrr ) Nθθ
−
+ s(r) = 0
r dr
r
p(r) = 0
1 d2 (rMrr )
r dr2
−
(39)
1 dMθθ
zf d
+ q(r) +
(rs) = 0
r dr
r dr
Then the boundary conditions are
δu0r :
Nr = nr Nrr
δu0θ :
Nθ = 0
δw0 :
"
#
nr d(rMrr )
− Mθθ + zf r s(r)
Qz =
r
dr
δβ :
Mr = nr Mrr
The governing equations are of order 6 in the displacements (u0r , w0 ) and there are 6 nontrivial
boundary conditions, (u0r , w0 , ∂w0 /∂r, Nr , Qz , Mr ).
8
(40)
2.1
Facesheet equations
2.1.4
2
THE THOMSEN MODEL
Summary of facesheet governing equations
The governing equations for the plate can then be summarized as follows:
• Equilibrium equations:
"
#
1 d
(rNrr ) − Nθθ + s(r) = 0
r dr
"
#
dMθθ
d
1 d2
(rMrr ) −
+ zf
(rs) + q(r) = 0
r dr2
dr
dr
• Stress-strain relations:
Nrr
A11
=
Nθθ
A12
Mrr
D11
=
Mθθ
D12
ε0rr
ε0θθ
D12 ε1rr
D11 ε1θθ
A12
A11
(41)
(42)
(43)
• Strain-displacement relations:
du0r
d2 w0
1
:=
; εrr (r) := − 2
dr
dr
u0r
1 dw0
ε0θθ (r) :=
; ε1θθ (r) := −
r
r dr
ε0rr (r)
(44)
• Boundary conditions:
δu0r :
δw0 :
δβ :
2.1.5
Nr = nr r Nrr
"
#
nr d
(rMrr ) − Mθθ + zf r s(r)
Qz =
r dr
(45)
Mr = nr r Mrr
Conversion into first-order ODEs
We would like to convert the governing equations for the axisymmetric plate into ODEs of first order
for computational purposes. To do that, we note that the stress resultants are related to the
displacements by
u0r
du0r
+ A12
Nrr = A11
dr
r
(46)
du0r
u0r
Nθθ = A12
+ A11
dr
r
From the first equation in (46), we have
du0r
Nrr A12 u0r
=
−
.
dr
A11 A11 r
(47)
Plugging the expression for Nθθ into the equilibrium equation for the stress resultants (41), we have
1 d
A12 du0r
u0r
(rNrr ) −
− A11 2 + s(r) = 0
r dr
r dr
r
9
(48)
2.1
Facesheet equations
2
THE THOMSEN MODEL
Using (47),
#
"
dNrr
A12 Nrr
+ 1−
+
dr
A11
r
A212
− A11
A11
!
u0r
+ s(r) = 0 .
r2
(49)
Recall that
dw0
=β
dr
Then the relations between the stress couples and the displacements take the form
Mrr = −D11
Mθθ = −D12
dβ
− D12
dr
dβ
− D11
dr
β
r
β
r
(50)
(51)
The first equation from (51) can be written as
dβ
Mrr D12 β
−
=−
dr
D11 D11 r
(52)
To convert the equilibrium equation for the stress couples into first-order ODEs, we define
Qr :=
1d
Mθθ
(rMrr ) −
+ zf s(r)
r dr
r
(53)
Then,
dMrr
(Mθθ − Mrr )
= Qr +
− zf s(r)
(54)
dr
r
Plugging in the expression for Mθθ from (51) and the expression for the derivative of β (52) we have
!
!
2 − D2
D12 − D11 Mrr
D12
β
dMrr
11
= Qr +
+
− zf s(r)
(55)
dr
D11
r
D11
r2
To reduce the order of the equilibrium equation for the stress couples, (41), we note that taking the
derivative of Qr from (53) gives us
r
dQr
d2
dMθθ
d
+ Qr = 2 (rMrr ) −
+ zf
(rs)
dr
dr
dr
dr
(56)
Therefore the equilibrium equation for the stress couples can be written as
dQr Qr
+
+ q(r) = 0
dr
r
10
(57)
2.2
2.1.6
Core equations
2
THE THOMSEN MODEL
Summary first-order ODEs for facesheets
The ODEs governing the facesheets are:
Nrr A12 u0r
du0r
=
−
dr
A11 A11 r
dw0
=β
dr
dβ
Mrr D12 β
=−
−
dr
D11 D11 r
#
#
"
"
dNrr
A12 − A11 Nrr
A211 − A212 u0r
=
+
− s(r)
dr
A11
r
A11
r2
#
#
"
"
2 − D2
dMrr
β
D12 − D11 Mrr
D12
11
− zf s(r)
= Qr +
+
dr
D11
r
D11
r2
dQr
Qr
=−
− q(r)
dr
r
(58)
(59)
(60)
(61)
(62)
(63)
and the boundary conditions are
u0r :
Nr = nr r Nrr
w0 :
Qz = nr r Qr
β:
2.2
2.2.1
(64)
Mr = nr r Mrr
Core equations
Stress-strain relations
We assume that the core is transversely isotropic. In that case, the stress-strain relations in the core
have the form
σrr = C11 εrr + C12 εθθ + C13 εzz
σθθ = C12 εrr + C11 εθθ + C13 εzz
σzz = C13 εrr + C13 εθθ + C33 εzz
(65)
σθz = 0 ; σrz = C55 εrz ; σrθ = 0
If we also assume that the core cannot sustain any in-plane stresses, then
σrr = 0 = C11 εrr + C12 εθθ + C13 εzz
σθθ = 0 = C12 εrr + C11 εθθ + C13 εzz
(66)
Therefore we have
(C11 − C12 ) (εrr − εθθ ) = 0
(67)
which implies that C11 = C12 . If we assume that C11 = C12 = C13 where 1 is a positive
quantity, then we have C13 = 0. Therefore the stress-strain relations in the core reduce to
σrr = 0 ; σθθ = 0 ; σzz = C33 εzz ; σθz = 0 ; σrz = C55 εrz ; σrθ = 0
11
(68)
2.2
Core equations
2.2.2
2
THE THOMSEN MODEL
Strain-displacement relations
From the strain-displacement relations we have
εzz
2.2.3
∂uz
1 ∂ur
∂uz
=
; εrz =
+
∂z
2 ∂z
∂r
(69)
Stress-displacement relations
Using the stress-strain relations we get
σzz = C33
2.2.4
C55 ∂ur
∂uz
∂uz
; σrz =
+
∂z
2
∂z
∂r
(70)
Equilibrium equations
The equilibrium equations also reduce accordingly to
σrz ∂σzz
∂σrz
∂σrz
=0;
+
+
=0
∂z
∂r
r
∂z
2.2.5
(71)
Expression for uz
Recall
σzz = C33
∂uz
∂z
=⇒
∂uz
= S33 σzz
∂z
(72)
where S33 := 1/C33 .
Integrating, we get
Z
zb
uz (r, z) =
S33 σzz dz + A(r)
(73)
za
where A(r) is a function only of r. Integrating by parts, we have
Z zb
∂σzz
zb
uz (r, z) = S33 z σzz |za −
z
dz + A(r)
∂z
za
(74)
Now we assume that the displacement uz is quadratic in z to get
σrz
∂σzz
∂σrz
=−
−
=: B(r)
∂z
∂r
r
where B(r) is a function only of r. If we set up the coordinate system in the core such that
zc = z − c where 2c is the core thickness and integrate from 0 to zc , we get
Z 0
uz (r, zc ) = S33 zc σzz (r, zc ) − B(r)
z dz + A(r)
zc
"
#
zc2
= S33 zc σzz (r, zc ) − B(r)
+ A(r)
2
12
(75)
(76)
2.2
Core equations
2
THE THOMSEN MODEL
At zc = c the displacement of the core is equal to the displacement of the top facesheet, i.e.,
"
#
c2
1
+ A(r)
w (r) = uz (r, c) = S33 c σzz (r, c) − B(r)
2
(77)
Eliminating A(r), we get
"
1
uz (r, zc ) = w (r) + S33
B(r) 2
{zc σzz (r, zc ) − c σzz (r, c)} −
zc − c2
2
#
.
(78)
We can also calculate the displacement at the bottom facesheet
"
w2 (r) = uz (r, −c) = S33
#
c2
−c σzz (r, −c) − B(r)
+ A(r)
2
(79)
Again, eliminating A(r), we have
w1 (r) − w2 (r) = c S33 [σzz (r, c) + σzz (r, −c)] .
2.2.6
(80)
Eliminating σzz
We would like to eliminate σzz from the expression in equation (90). To do that, we recall that
∂σzz
= B(r)
∂z
(81)
Integrating between the limits 0 and zc as before, we get
σzz (r, zc ) = B(r) zc + E(r)
(82)
where E(r) is a function of r only. Therefore,
σzz (r, c) = B(r) c + E(r) ; σzz (r, −c) = −B(r) c + E(r)
(83)
E(r) = σzz (r, c) − c B(r) .
(84)
σzz (r, zc ) = (zc − c) B(r) + σzz (r, c)
(85)
σzz (r, c) + σzz (r, −c) = 2E(r) = 2[σzz (r, c) − c B(r)]
(86)
w1 (r) − w2 (r) = 2 c S33 [σzz (r, c) − c B(r)]
(87)
which gives
Therefore,
We also have,
Hence, from (80),
or,
σzz (r, c) =
C33 1
w (r) − w2 (r) + c B(r)
2c
(88)
σzz (r, zc ) =
C33 1
w (r) − w2 (r) + zc B(r)
2c
(89)
Combining (85) and (88),
13
2.2
Core equations
2
THE THOMSEN MODEL
Using (88) and (89) in (78) gives
!"
#
w1 (r) − w2 (r)
zc − c
+ (zc + c) S33 B(r) .
2
c
1
uz (r, zc ) = w (r) +
(90)
Now, from equations (10) for the facesheets, we have
top
w1 (r) = w0 ; w2 (r) = w0bot
respectively. Plugging these into (90) gives
!
1 zc
1
top
uz (r, zc ) =
+ 1 w0 −
2 c
2
2.2.7
zc
−1
c
!
w0bot +
(91)
1 2
zc − c2 S33 B(r) .
2
(92)
Expression for ur
Recall that
σrz
C55 ∂ur
∂uz
+
=
2
∂z
∂r
(93)
Therefore,
∂ur
∂uz
= 2 S55 σrz −
;
S55 := 1/C55
∂z
∂r
Also, taking the r-derivative of equation (92), we have
!
!
top
∂B
∂w0
∂w0bot 1 2
∂uz
1 zc
1 zc
=
+1
−
−1
+
zc − c2 S33
.
∂r
2 c
∂r
2 c
∂r
2
∂r
(94)
(95)
Substitution of (95) into (94) gives
1
∂ur
= 2 S55 σrz −
∂z
2
zc
+1
c
!
top
dw0
1
+
dr
2
zc
−1
c
!
dw0bot 1 2
dB
−
zc − c2 S33
.
dr
2
dr
Note that ∂σrz = 0 =⇒ σrz = σrz (r). Integrating (96) between 0 and zc , we get
∂z
!
!
top
dw0
dw0bot
1 zc2
1 zc2
ur (r, zc ) = 2 S55 zc σrz −
+ zc
+
− zc
2 2c
dr
2 2c
dr
!
dB
1 zc3
−
− c2 zc S33
+ G(r)
2 3
dr
(96)
(97)
where G(r) is a function only of r.
At zc = c, ur = u1 (r). Hence we have
top
G(r) = u1 − 2 S55 c σrz +
3c dw0
c dw0bot c3
dB
+
− S33
4 dr
4 dr
3
dr
14
(98)
2.2
Core equations
2
THE THOMSEN MODEL
Substitution of (98) into (97) gives
"
3c 1
ur (r, zc ) = u + 2 S55 (zc − c) σrz +
−
4
2
1
zc2
+ zc
2c
!#
!#
"
top
dw0
dw0bot
c 1 zc2
+
+
− zc
dr
4 2 2c
dr
!#
"
dB
c3 1 zc3
S33
−
+
− c2 zc
3
2 3
dr
(99)
Now, from equations (10) and (30) for the facesheets, we have
top
dw0
dw0bot
=: β top ;
=: β bot
dr
dr
top
bot bot
u1 (r) = u0r + f top β top ; u2 (r) = ubot
β
0r − f
(100)
where 2 f top and 2 f bot are the thicknesses of the top and bottom facesheets, respectively. Plugging
these into (99 gives
!#
"
2
z
3c
1
c
top
β top
−
+ zc
ur (r, zc ) = u0r + f top β top + 2 S55 (zc − c) σrz +
4
2 2c
"
!#
!#
"
(101)
c 1 zc2
c3 1 zc3
dB
2
bot
+
+
− zc
+
− c zc
β −
S33
4 2 2c
3
2 3
dr
or,
"
!#
2
c
z
1
c
β top +
+
− zc
β bot
4 2 2c
"
!#
c3 1 zc3
dB
2
+2 S55 (zc − c) σrz −
+
− c zc
S33
3
2 3
dr
3c 1
top
ur (r, zc ) = u0r + f top + −
4
2
2.2.8
zc2
+ zc
2c
!#
"
(102)
Governing equation for the core
Now, at the bottom of the core, zc = −c. From (102) we have
2
dB(r)
top
ur (r, −c) = u2 = u0r + f top + c β top + c β bot − 4 S55 σrz c − S33 c3
3
dr
(103)
Also
bot bot
u2 = ubot
β
0r − f
Hence
top
2
dB(r)
top
0 = u0r − ubot
+ c β top + f bot + c β bot − 4 S55 σrz c − S33 c3
0r + f
3
dr
(104)
Recall that
B=−
dσrz σrz
−
dr
r
Therefore,
dB
d2 σrz σrz 1 dσrz
=−
+ 2 −
dr
dr2
r
r dr
15
(105)
3
COUPLED GOVERNING EQUATIONS OF THE FACESHEETS AND THE CORE
Plugging (105) into (104) gives
top
top
0 = u0r − ubot
+ c β top + f bot + c β bot
0r + f
#
"
2σ
dσ
2
d
σ
1
rz
rz
rz
− 4 S55 σrz c − S33 c3 −
+ 2 −
3
dr2
r
r dr
(106)
or,
!
6C33 S55
1
+
σrz
r2
c2
i
3C33 h top
top
= − 3 u0r − ubot
+ c β top + f bot + c β bot
0r + f
2c
d2 σrz 1 dσrz
+
−
dr2
r dr
2.2.9
(107)
Conversion into first order ODEs
To convert (107) into first-order ODEs, we define
Tr :=
dσrz
dr
(108)
Then equation (107) can be written as
top
bot i
3C33 h top
dTr
top
bot
= − 3 u0r − ubot
+
f
+
c
β
+
f
+
c
β
0r
dr
2c
!
1
6C33 S55
Tr
+
+
σrz −
r2
c2
r
2.2.10
(109)
Summary of first order ODEs for the core
The governing equations for the stresses in the core are
dσrz
= Tr
dr
top
bot i
dTr
3C33 h top
top
bot
+
f
+
c
β
+
f
+
c
β
= − 3 u0r − ubot
0r
dr
2c
!
1
6C33 S55
Tr
+
+
σrz −
2
2
r
c
r
σzz (r, zc ) =
3
C33 1
σrz
w (r) − w2 (r) − zc Tr − zc
2c
r
(110)
(111)
(112)
Coupled governing equations of the facesheets and the core
In the previous section, ODEs have been derived that partially couple the core to the facesheets. To
complete the coupling of the facesheets to the core we have to balance the forces at the interfaces
between the core and the facesheets. We introduce some new notation to aid us in the coupling
process. Recall that for a facesheet
s(r) = sTop Face + sBot Face ; q(r) = q Top Face + q Bot Face
16
(113)
3
COUPLED GOVERNING EQUATIONS OF THE FACESHEETS AND THE CORE
We identify these two sets of applied tractions on the two facesheets using the notation
stop (r) = stt + stb ; q top (r) = q tt + q tb ; sbot (r) = sbt + sbb ; q bot (r) = q bt + q bb
(114)
The tractions at the core-facesheet interface are given by
t = tr er + tθ eθ + tz ez
= (nr σrr + nθ σrθ + nz σrz ) er + (nr σrθ + nθ σθθ + nz σθz ) eθ
(115)
+ (nr σrz + nθ σθz + nz σzz ) ez
where er , eθ , ez are the basis vectors in the r, θ, z directions. In the core
σrr = σθθ = σθz = σrθ = 0. Therefore, the traction vector simplifies to
t = nz σrz er + (nr σrz + nz σzz ) ez
(116)
At the interface between the core and the top facesheet, nr = 0, nz = 1 while at the interface
between the core and the bottom facesheet nr = 0, nz = −1. Therefore,
core
core
core
core
ttc (r) = σrz
(r) er + σzz
(r, c) ez ; tbc (r) = −σrz
(r) er − σzz
(r, −c) ez
(117)
To couple the facesheet equations to the core equations we have, due to the continuity of tractions at
the core-facesheet interfaces,
stb (r) + ttc (r) · er = 0
=⇒
core
stb (r) = −σrz
(r)
sbt (r) + tbc (r) · er = 0
=⇒
core
sbt (r) = σrz
(r)
q tb (r) + ttc (r) · ez = 0
=⇒
core
q tb (r) = −σzz
(r, c)
q bt (r) + tbc (r) · ez = 0
=⇒
core
q bt (r) = σzz
(r, −c)
(118)
From equations (89) and (75)
core
σzz
(r, zc ) =
core
core
i
dσrz
σrz
C33 h top
w0 − w0bot − zc
− zc
2c
dr
r
(119)
Therefore,
core h
core
core
i
C33
dσrz
σrz
top
w0 − w0bot + c
+c
2c
dr
r
core
core h
core
i
dσ
σ
C
rz
rz
top
q bt (r) = 33 w0 − w0bot + c
+c
2c
dr
r
Equation (57) then takes the form
q tb (r) = −
top
top
top
dQr
Qr
Qr
=−
− q top (r) = −
+
dr
r
r
dQbot
Qbot
Qbot
r
r
r
bot
=−
− q (r) = −
−
dr
r
r
core
C33
2c
core
C33
2c
core
core
h
i
dσrz
σrz
top
−c
− q tt
w0 − w0bot − c
dr
r
core
core
h
i
dσrz
σrz
top
bot
w0 − w0 − c
−c
− q bb
dr
r
Similarly, equation (49) takes the form
" top
# top " top
# top
top
top
top
dNrr
A12 − A11 Nrr
(A11 )2 − (A12 )2 u0r
core
=
+
+ σrz
− stt
top
top
2
dr
r
r
A11
A11
17
(120)
(121)
(122)
3
and
COUPLED GOVERNING EQUATIONS OF THE FACESHEETS AND THE CORE
#
#
"
"
bot
bot
bot
bot )2 − (Abot )2
dNrr
N
ubot
Abot
−
A
(A
rr
0r
12
11
11
12
core
=
+
− σrz
− sbb
bot
2
dr
r
r
Abot
A
11
11
Also, equation (55) takes the form
#
#
" top
" top
top
top
top
top
dMrr
D12 − D11 Mrr
(D12 )2 − (D11 )2 β top
core
top
+ f top (stt − σrz
)
= Qr +
+
top
top
2
dr
r
r
D11
D11
(123)
(124)
and
#
#
"
"
bot
bot
bot − D bot
bot )2 − (D bot )2
Mrr
β bot
(D12
dMrr
D12
11
11
core
bot
− f bot (sbb + σrz
)
= Qr +
+
bot
bot
2
dr
r
r
D11
D11
(125)
The governing first order ODEs for the facesheets and the core can then be expressed as
• Top facesheet:
top
top
top
top
du0r
Nrr
A u0r
= top − 12
top
dr
A11
A11 r
top
dw0
= β top
dr
top
top
dβ top
D β top
Mrr
= − top − 12
top
dr
D11
D11 r
# top " top
# top
" top
top
top
top
dNrr
A12 − A11 Nrr
(A11 )2 − (A12 )2 u0r
core
=
+
+ σrz
− stt
top
top
dr
r
r2
A11
A11
#
#
" top
" top
top
top
top
top
D12 − D11 Mrr
(D12 )2 − (D11 )2 β top
dMrr
top
core
= Qr +
+
+ f top (stt − σrz
)
top
top
2
dr
r
r
D11
D11
top
top
core
i
dQr
Qr
C core h top
σrz
=−
+ 33 w0 (r) − w0bot (r) − c Trcore − c
− q tt
dr
r
2c
r
18
(126)
4
FINITE ELEMENT FORMULATION OF THE COUPLED GOVERNING EQUATIONS
• Bottom facesheet:
bot
bot
dubot
Abot
Nrr
0r
12 u0r
= bot − bot
dr
A11
A11 r
dw0bot
= β bot
dr
bot
Mrr
Dbot β bot
dβ bot
= − bot − 12
bot r
dr
D
D11
#
#
" 11
"
bot
bot
bot
2
bot 2
dNrr
Nrr
ubot
Abot
(Abot
0r
12 − A11
11 ) − (A12 )
core
=
+
− σrz
− sbb
bot
bot
dr
r
r2
A11
A11
#
#
"
"
bot
bot
bot − D bot
bot )2 − (D bot )2
M
β bot
dMrr
D
(D
rr
12
11
12
11
core
= Qbot
+
+
− f bot (sbb + σrz
)
r
bot
bot
dr
r
r2
D11
D11
core
i
dQbot
Qbot
C core h top
σrz
r
r
=−
− 33 w0 (r) − w0bot (r) − c Trcore − c
− q bb
dr
r
2c
r
(127)
• Core:
core
dσrz
= Trcore
dr
top
bot i
dTrcore
3C core h top
top
bot
+
f
+
c
β
+
f
+
c
β
= − 333
u0r − ubot
0r
dr
2c
!
core S core
1
6C33
Trcore
55
core
+
+
σ
−
rz
r2
c2
r
(128)
This is a set of 14 coupled ODEs that can be solved using a number of approaches. Thomsen and
coworkers [7, 8] use a multi-segment integration approach to solve these equations. Since it is
considerably simple to solve the original system of equations using the finite element approach, we
have used finite elements in this work.
4
Finite element formulation of the coupled governing equations
For the finite element formulation of the governing equations, it is convenient to start with the
statement of virtual work for the facesheets, i.e.,
#
Z "
dδu0r Nθθ
d2 δw0 Mθθ dδw0
Nrr
+
δu0r − Mrr
dΩ0 =
−
dr
r
dr2
r
dr
Ω0
#
Z "
dδw0
+ q(r) δw0 dΩ0
(129)
s(r) δu0r − zf s(r)
dr
Ω0
#
I "
dδw0
+
Nr δu0r − Mr
+ Qz δw0 dΓ0
dr
Γ0
where
du0r
u0r
du0r
u0r
+ A12
; Nθθ = A12
+ A11
dr
r
dr
r
2
2
d w0 D12 dw0
d w0 D11 dw0
= −D11
−
; Mθθ = −D12
−
dr2
r dr
dr2
r dr
Nrr = A11
Mrr
19
(130)
4
FINITE ELEMENT FORMULATION OF THE COUPLED GOVERNING EQUATIONS
Separating terms containing δu0r and δw0 leads to two equations
#
(
)
I
Z "
dδu0r
Nθθ
Nr δu0r dΓ0
(131)
Nrr
+
− s(r) δu0r dΩ0 =
dr
r
Γ0
Ω0
#
#
(
)
Z "
I "
d2 δw0
dδw0
Mθθ
dδw0
Mrr
Mr
+
+ zf s(r)
+ q(r) δw0 dΩ0 =
− Qz δw0 dΓ0
dr2
r
dr
dr
Γ0
Ω0
(132)
The continuity of tractions across the facesheet-core interfaces requires that
core
core
core
C33
σrz
dσrz
top
[w0 (r) − w0bot (r)] + c
+c
+ q tt (r)
2c
dr
r
core
core
dσrz
σrz
C core top
+c
+ q bb (r)
q bot (r) = q bt (r) + q bb (r) = 33 [w0 (r) − w0bot (r)] + c
2c
dr
r
q top (r) = q tb (r) + q tt (r) = −
and
core
stop (r) = stb (r) + stt (r) = −σrz
(r) + stt (r)
(133)
(134)
core
sbot (r) = sbt (r) + sbb (r) = σrz
(r) + sbb (r)
Plugging these into equations (131) and (132) leads to, for the top facesheet,
Z top
top
Nrr
Ω0
Z Ω0
dδu0r
+
dr
top
top
Mrr
d2 δw0
+
dr2
−
top
Nθθ
core
+ σrz
− stt
r
top
top
δu0r
I
dΩ0 =
Γ0
top
Nrtop δu0r dΓ0
top
Mθθ
core
− f top stt − σrz
r
core
core
core dσrz
C33
σrz
top
top
bot
(w0 − w0 ) − c
−c
δw0 dΩ0
2c
dr
r
#
I "
top
top
top dδw0
top
=
Mr
dΓ0
− Qz δw0
dr
Γ0
dδw0
dr
and for the bottom facesheet
bot
Z I
bot
Nθθ
bot dδu0r
core
Nrr
+
− σrz
− sbb δubot
dΩ
=
Nrbot δubot
0
0r
0r dΓ0
dr
r
Ω0
Γ0
bot
Z 2
bot
dδw0bot
Mθθ
bot d δw0
bb
core
bot
Mrr
+
+f
s + σrz
dr2
r
dr
Ω0
core
core
core C33
dσrz
σrz
top
bot
bot
(w0 − w0 ) + c
+c
δw0 dΩ0
+
2c
dr
r
#
"
I
dδw0bot
bot
=
Mrbot
− Qbot
dΓ0
z δw0
dr
Γ0
The governing ordinary differential equation for the core is
!
core
core
core S core
d2 σrz
1 dσrz
1
6C33
55
core
+
−
+
σrz
dr2
r dr
r2
c2
"
#
top
bot
core
3C33
dw
dw
top
0
0
top
=−
u0r − ubot
+c
+ f bot + c
0r + f
2c3
dr
dr
20
(135)
(136)
(137)
(138)
(139)
4
FINITE ELEMENT FORMULATION OF THE COUPLED GOVERNING EQUATIONS
Multiplying the equation with a test function and integration over the area Ω0 yields, after an
integration by parts, the equation:
! !
Z core
core S core
core
dδσ
6C
dσ
1
dσrz dδσrz 1
rz
rz
33
55
core
core
σrz
+
σrz
+
+
δσrz +
dr
dr
r
dr
dr
r2
c2
Ω0
#
"
top
core
bot 3C33
dw
dw
top
0
0
bot
top
bot
δσrz dΩ0
−
u0r − u0r + f + c
+ f +c
2c3
dr
dr
!
I
core
core
dσrz
σrz
=
δσrz dΓ0
+
dr
r
Γ0
(140)
Equations (135), (136), (137), (138), and (140) form the system that has been discretized using the
finite element approach.
top
top
bot
core
We assume that the fields u0r , ubot
0r , w0 , w0 , σrz can be expressed as
top
nu
X
top
i=1
nw
X
u0r (r) =
w0 (r) =
core
σrz
(r) =
i=1
ns
X
top
nu
X
top
i=1
nw
X
ui Niu (r) ; ubot
0r (r) =
u
ubot
i Ni (r)
wi Niw (r) ; w0bot (r) =
wibot Niw (r)
(141)
i=1
σi Nis (r)
i=1
where nu, nw, ns are the number of nodes and Niu,w,s are the basis functions that are required to
represent the field variables. Then, the stress and stress couple resultants can be expressed as
#
"
#
"
nu
nu
u
u
u
u
X
X
N
N
dN
dN
j
j
j
j
top
top
top
top
top
top
top
top
+ A12
+ A11
uj ; Nθθ =
A12
uj
Nrr
=
A11
dr
r
dr
r
j=1
j=1
"
"
#
#
nu
nu
X
X
dNju
Nju
dNju
Nju
bot
bot
bot
bot
bot
bot
bot
Nrr =
A11
+ A12
uj ; Nθθ =
A12
+ A11
ubot
j
dr
r
dr
r
j=1
j=1
"
#
"
#
top
top
nw
nw
2N w
w
w
2N w
X
X
d
dN
d
dN
D
D
j
j
j
j
top
top
top
top
top
top
Mrr
=−
D11
+ 12
+ 11
wj ; Mθθ = −
D12
wj
dr2
r
dr
dr2
r
dr
j=1
j=1
#
"
#
"
nw
nw
2N w
2N w
bot dN w
bot dN w
X
X
d
d
D
D
j
j
j
j
12
11
bot
bot
bot
bot
+
wjbot ; Mθθ
D12
+
wjbot
Mrr
=−
D11
=−
dr2
r
dr
dr2
r
dr
j=1
j=1
(142)
21
4.1
Finite
4 FINITE
elementELEMENT
basis functions
FORMULATION OF THE COUPLED GOVERNING EQUATIONS
and the momentum balance equations can be written as
Z top
Nrr
Ω0
Z dNiu
+
dr
u
bot dNi
Nrr
dr
Ω0
+
top
ns
X
Nθθ
+
σk Nks
r
bot
Nθθ
r
−
top
Mθθ
k=1
ns
X
σk Nks
Niu
Z
stt Niu dΩ0 +
dΩ0 =
I
Ω0
Niu dΩ0 =
Z
Γ0
sbb Niu dΩ0 +
Ω0
k=1
ns
X
Nrtop Niu dΓ0 (143)
I
Nrbot Niu dΓ0 (144)
Γ0
nu
core X
C33
dNiw
top
−
(wk − wkbot ) Nkw
r
dr
2c
Ω0
k=1
k=1
! ns
s
s
X
dNk Nk
−c
σk Niw dΩ0
+
dr
r
k=1
#
Z
I "
w
w
top tt dNi
top dNi
top
w
=
f s
dΩ0 +
Mr
− Qz Ni dΓ0
(145)
dr
dr
Ω0
Γ0
bot
core X
Z ns
2 w
X
Mθθ
dNiw
C33 nu top
bot d Ni
bot
s
Mrr
+
+
f
+
(wk − wkbot ) Nkw
σ
N
k
k
2
dr
r
dr
2c
Ω0
k=1
k=1
! ns
s
s
X
dNk Nk
+c
+
σk Niw dΩ0
dr
r
k=1
#
I "
Z
w
w
dN
dN
i
i
w
dΩ0 +
− Qbot
Mrbot
dΓ0
(146)
=−
f bot sbb
z Ni
dr
dr
Γ0
Ω0
!
Z X
ns core S core dNjs Njs dNis dNjs Nis
1
6C33
55
s
s
+
+
+
+
Nj Ni σj
dr
r
dr
dr r
r2
c2
Ω0 j=1
" nu
#
nw
core X
w
X
3C33
dN
top
top
k
s
u
bot
top
bot
bot
Ni dΩ0
−
Nk (uk − uk ) +
f + c wk + f + c wk
2c3
dr
k=1
k=1
!
I
core
core
σrz
dσrz
=
+
Nis dΓ0
(147)
dr
r
Γ0
Z top
Mrr
d2 Niw
+
dr2
+ f top
σk Nks
After plugging in the expressions for the resultant stress and stress couples, we can express the
above equations in matrix form as
tt
[Kuu ]
[0]
[0]
[0]
tt ]
[0]
[K
[0]
[0]
ww
bb
[0]
[0]
[Kuu ]
[0]
[0]
[0]
[0]
[Kbb
ww ]
t
t
b
[Ksu ] [Ksw ] [Ksu ] [Kbsw ]
4.1
top top
[Ktus ]
u
fu
wtop fwtop
[Ktws ]
bot
bot
[Kbus ]
u = fu
bot
b
[Kws ] w fwbot
σ
[Kss ]
fσ
Finite element basis functions
Note that the stiffness matrix is not symmetric. This system of equations is solved using
COMSOLTM using quadratic shape functions for the u-displacement and the σ-stress and cubic
22
(148)
4.2
Boundary
4 FINITE
conditions
ELEMENT FORMULATION OF THE COUPLED GOVERNING EQUATIONS
Hermite functions for the w-displacement, i.e., in each element nu = ns = 3, nw = 4, and
Niu (r)
N1w (r)
N3w (r)
4.2
=
Nis (r)
=
2
3
Y
j=1,i6=j
3
r − rj
ri − rj
= 1 − 3 r + 2 r ; N2w (r) = (r2 − r1 ) r − 2 r2 + r3
(149)
= 3 r2 − 2 r3 ; N4w (r) = (r2 − r1 )(−r2 + r3 )
Boundary conditions
The natural boundary conditions are
top
Top facesheet : Nrtop , Qtop
z , Mr
bot
Bottom facesheet : Nrbot , Qbot
z , Mr
(150)
core
core
dσrz
σrz
Core :
+
dr
r
The essential boundary conditions are
top
dw0
dr
bot
bot dw0
Bottom facesheet : ubot
,
w
,
0r
0
dr
core
Core : σrz
top
top
Top facesheet : u0r , w0 ,
(151)
Note that fixing the uz displacement at the boundary of the core is equivalent to setting the natural
top
boundary condition in the core to zero when w0 = w0bot = 0 at the boundary.
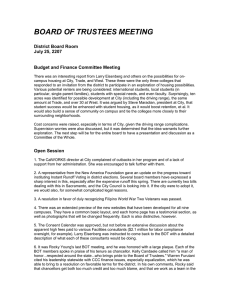
4.2.1
Through-the-thickness insert
The boundary conditions used for a simply-supported sandwich panel with a through-the-thickness
insert are shown in Figure 3. The radius of the insert is ri , that of the potting is rp , and that of the
panel is ra . Therefore, for part of the panel, the potting is assumed to have the same behavior as the
core.
For this situation, the boundary conditions at the left edge, r = ri , are
top
top
bot
u0r = ubot
0r = 0 ; Mr = Mr = 0
Q f top
Q f bot
bot
;
Q
=
z
f top + 2c + f bot
f top + 2c + f bot
Q
= ,
A
Qtop
z =
core
σrz
(152)
where A = 2 π ri (f top + 2c + f bot ). These are applied to the two dimensional model as a constant
pressure in the z direction, with P = Q/A.
At the right edge, r = ra , the structure is simply supported, with the conditions:
wtop = wbot = 0 ; Mrtop = Mrbot = 0 ; Nrtop = Nrbot = 0 ;
dσrz σrz
+
= 0.
dr
ra
(153)
The support condition is applied to the two dimensional model by setting w0 = 0 along the right
23
4.2
Boundary
4 FINITE
conditions
ELEMENT FORMULATION OF THE COUPLED GOVERNING EQUATIONS
ra
rp
Potting
qtt
r
i
Facesheet
s tt
Core
r=0
s bb
−qbb
r=0
top
u =0
0r
top
Mr = 0
top
Q = f
Q
z
2(f+c)
σ
core
rz
=
1
4 π r (f+c)
i
top
w =0
0
top
Nr =0
top
Mr = 0
Insert
dσ
core
rz
dr
Q
σ
+
core
rz
ra
=0
bot
w =0
0
bot
Nr =0
bot
Mr = 0
bot
u =0
0r
bot
Mr = 0
bot
Q = f
Q
z
2(f+c)
Figure 3 – Boundary conditions for a through-the-thickness insert in a simply
supported sandwich panel.
edge.
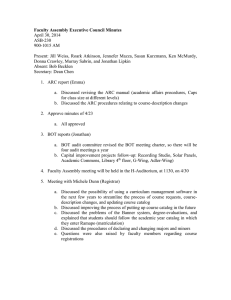
4.2.2
Potted insert
The boundary conditions used for a simply-supported sandwich panel with a potted insert are shown
in Figure 4. The radius of the insert is ri , that of the potting is rp , and that of the panel is ra . The
length of the insert is 2fi and the thickness of the potting below the insert is 2c− . Therefore, the
insert is being treated as a thin plate in the region above the potting and the potting is being treated
as a material with features similar to the core.
To allow for the jump discontinuities on the two sides of the insert-facesheet interface, we define the
+
quantities u−
0r and u0r to be the u0r displacements of the insert and the top facesheet, respectively.
The locations where these quantities are evaluated are shown in Figure 4. Then the continuity of
displacements requires that
dw0interface
+
−
u0r = u0r − (fi − f )
(154)
dr
There is also a jump in the shear stress in the two sections of the potting to the left and right of the
− and σ + . We assume that the average force at the interface is
interface. Let these quantities be σrz
rz
balanced, i.e.,
−
+
c− σrz
= c σrz
.
(155)
24
5
MODEL TEST CASES: FRP SANDWICH
ra
rp
qtt
r
i
Facesheet
s tt
Core
r=0
Insert
s bb
−qbb
r=0
top
u =0
0r
top
dw 0
=0
dr
top
Q =0
z
σ
+
u
0r
2f
i
core
rz
top
w =0
0
top
Nr =0
top
Mr = 0
Potting
−
u
0r
=0
dσ
rz
dr
−
2c
bot
u =0
0r
bot
dw 0
=0
dr
bot
Q =0
z
σ
core
σ
−
σ
+
core
rz
ra
=0
bot
w =0
0
bot
Nr =0
+
bot
Mr = 0
rz
rz
Figure 4 – Boundary conditions for a potted insert in a simply supported sandwich panel.
The boundary conditions at r = 0 are
top
top
u0r
=
ubot
0r
dw0
dw0bot
bot
core
=0;
=
= 0 ; Qtop
z = Qz = 0 ; σrz = 0
dr
dr
(156)
The simply-supported boundary at r = ra once again requires that
wtop = wbot = 0 ; Mrtop = Mrbot = 0 ; Nrtop = Nrbot = 0 ;
5
dσrz σrz
+
= 0.
dr
ra
(157)
Model Test Cases: FRP Sandwich
In order to validate the one dimensional approximation, the results for test cases are compared with
the results generated by a two dimensional axisymmetric model. In each test case, a rigid, through
the thickness insert applies a vertical compression load of Q = 1000N to a simply supported
sandwich panel.
25
5.1
Example 1: Stiff facesheets
5
MODEL TEST CASES: FRP SANDWICH
The facesheets are assumed to be isotropic, i.e,
E
; A12 = 2 f C12 = 2f
1 − ν2
2f 3 E
2 f3
2f 3
=
;
D
=
C
=
12
12
3 1 − ν2
3
3
A11 = 2 f C11 = 2f
2 f3
=
C11
3
D11
νE
1 − ν2
νE
1 − ν2
(158)
where E is the Young’s modulus and ν is the Poisson’s ratio.
The core moduli are given by
C33 =
Eh
; C55 = 2 Gh
1 − νh2
(159)
where Eh , Gh , νh are the Young’s modulus, shear modulus, and the Poisson’s ratio of the core. The
potting moduli are also computed in a manner similar to those of the core.
5.1
Example 1: Stiff facesheets
The first example problem is taken from [7], with the parameters given in Table 1. Figure 5(a)
compares the resulting out of plane displacements from the sandwich theory and the two
dimensional axisymmetric simulations. While there is a small amount of disagreement in the potting
region, the overall results match up well. The radial displacement, ur , is shown in figure 5(b), and
these results match as well. Core shear stresses and transverse stresses at the bottom of the core are
shown in Figure 6. The stresses match reasonably well too.
Table 1 – Geometric and material parameters for Example 1
Geometry (mm):
Face Sheets (GPa) :
Potting (GPa) :
Honeycomb (MPa) :
0
ri = 7.0
E1 = 71.5
Ep = 2.5
Eh = 310
rp = 10.0
G1 = 27.5
Gp = 0.93
Gh = 138
ra = 60.0
Example #1: Transverse Displacement − Top Face
−0.02
f bot = 0.1
Example #1: Axial Displacement − Top Face
0
1D Approximation
2D Axisymmetric Model
f top = 0.1
c = 10.0
1D Approximation
2D Axisymmetric Model
−0.002
−0.004
−0.06
u t (mm)
wt (mm)
−0.04
−0.08
−0.1
−0.006
−0.008
−0.12
−0.01
−0.14
−0.16
0
10
20
30
40
r (mm)
50
−0.012
0
60
(a) Out-of-plane displacement (wt ).
10
20
30
40
r (mm)
50
60
(b) In-plane displacement (ut ).
Figure 5 – Comparisons of displacements from one-dimensional and twodimensional finite element simulations for the model in Table 1.
5.2
Example 2: Soft facesheets
The second example problem is taken from [8], with the parameters given in Table 2. Once again,
figure 7(a) shows the out of plane displacements given by the sandwich theory and the axisymmetric
26
6
Example #1: Core Shear Stress
1.4
Example #1: Transverse Stress − Core Bottom
1D Approximation
2D Axisymmetric Model
1.2
0
σzz (MPa)
σrz (MPa)
1D Approximation
2D Axisymmetric Model
0.1
1
0.8
0.6
−0.1
−0.2
−0.3
0.4
−0.4
0.2
−0.5
0
SUMMARY AND CONCLUSIONS
0
10
20
30
40
r (mm)
50
0
60
(a) Core shear stress (σrz ).
10
20
30
40
r (mm)
50
60
(b) Transverse stress (σzz )- core bottom.
Figure 6 – Comparisons of stresses from one-dimensional and two-dimensional
finite element simulations for the model in Table 1.
simulations, and figure 7(b) gives the radial displacements. As in the first example, the results match
reasonably well, suggesting that the sandwich theory captures the important physics of the problem.
The stresses shown in Figure 8 also show that the one- and two-dimensional models predict similar
results. The values of transverse stress and displacement at the bottom of the core are shown in
Figure 9.
Table 2 – Geometric and material parameters for Example 2
ri = 10.0
E1 = 40.0
Ep = 2.5
Eh = 310
Geometry (mm):
Face Sheets (GPa) :
Potting (GPa):
Honeycomb (MPa):
0
rp = 30.0
G1 = 14.8
Gp = 0.93
Gh = 138
ra = 150.0
Example #2: Transverse Displacement − Top Face
1D Approximation
−0.004
2D Axisymmetric Model
−0.006
−0.3
−0.008
u (mm)
−0.01
t
wt (mm)
−0.002
−0.2
−0.4
f bot = 0.1
Example #2: Axial Displacement − Top Face
0
−0.1
f top = 0.5
c = 5.0
−0.012
−0.014
−0.5
−0.016
1D Approximation
2D Axisymmetric Model
−0.6
−0.018
−0.7
−0.02
0
50
r (mm)
100
0
150
50
100
r (mm)
(a) Out-of-plane displacement (wt ).
(b) In-plane displacement (ut ).
Figure 7 – Comparison of displacements from one-dimensional and twodimensional finite element simulations for the model in Table 2.
27
150
6
Example #2: Core Shear Stress
1.4
Example #2: Transverse Stress − Top of Core
1
1D Approximation
1.2
2D Axisymmetric Model
1
0.5
σ (MPa)
0.8
zz
σrz(MPa)
SUMMARY AND CONCLUSIONS
0.6
0
0.4
1D Approximation
2D Axisymmetric Model
0.2
−0.5
0
0
50
r (mm)
100
0
150
(a) Core shear stress (σrz ).
10
20
30
r (mm)
40
50
60
(b) Transverse stress (σzz )- core top.
Figure 8 – Comparison of stresses from one-dimensional and two-dimensional finite element simulations for the model in Table 2.
Example #2: Transverse Stress − Bottom of Core
0.5
0
1D Approximation
2D Axisymmetric Model
−0.1
−0.2
zz
wb (mm)
(MPa)
0
σ
Example #2: Transverse Displacement − Bottom Face
−0.5
−0.3
−0.4
−0.5
−0.6
−1
1D Approximation
2D Axisymmetric Model
−0.7
0
10
20
30
r (mm)
40
50
0
60
50
100
150
r (mm)
(a) Transverse stress (σzz )- core bottom.
(b) Transverse disp. (wb )- core bottom.
Figure 9 – Comparison of stresses and displacements at the bottom of the core
from one-dimensional and two-dimensional finite element simulations
for the model in Table 2.
28
REFERENCES
6
Summary and Conclusions
A detailed on-dimensional theory for sandwich panels with inserts has been derived. The approach
follows that used by Thomsen [8]. The models has been discretized using a finite element approach.
The one-dimensional model produces results that are close to those of a two-dimensional
axisysmmetric finite element model. Both models assume that the core is homogeneous, indicating
that the one-dimensional model might be well suited for small deformations of sandwich specimens
with foam cores. Further work is need to find nonlinear one-dimensional models of sandwich panels
with inserts.
Acknowledgments
This work was funded by a subcontract of the University of Auckland Research for Industry grant
“Advanced Composite Structures” from the New Zealand Foundation for Research, Science, and
Technology.
References
[1] F. J. Plantema. Sandwich Construction. John Wiley and Sons, New York, 1966.
[2] W. S. Burton and A. K. Noor. Assessment of continuum models for sandwich panel
honeycomb cores. Comput. Methods Apl. Mech. Engrg., 145:341–360, 1997.
[3] L. Vu-Quoc, I. K. Ebcioğlu, and H. Deng. Dynamic formulation for geometrically-exact
sandwich shells. Int. J. Solids Struct., 34(20):2517–2548, 1997.
[4] T. Anderson, E. Madenci, W. S. Burton, and J. Fish. Analytical solution of finite-geometry
composite panels under transient surface loading. Int. J. Solids Struct., 35(12):1219–1239,
1998.
[5] A. Barut, E. Madenci, J. Heinrich, and A. Tessler. Analysis of thick sandwich construction by a
{3,2}-order theory. Int. J. Solids Struct., 38:6063–6077, 2001.
[6] A. Barut, E. Madenci, T. Anderson, and A. Tessler. Equivalent single-layer theory for a
complete stress field in sandwich panels under arbitrary distributed loading. Composite
Structures, 58:483–495, 2002.
[7] O. T. Thomsen and W. Rits. Analysis and design of sandwich plates with inserts - a higher
order sandwich plate theory. Composites Part B, 29B:795–807, 1998.
[8] O. T. Thomsen. Sandwich plates with ’through-the-thickness’ and ’fully potted’ inserts:
evaluation of differences in structural performance. Composites Structures, 40(2):159–174,
1998.
[9] O. T. Thomsen. High-order theory for the analysis of multi-layer plate assemblies and its
application for the analysis of sandwich panels with terminating plies. Composites Structures,
50:227–238, 2000.
[10] O. Rabinovitch and Y. Frostig. High-order behavior of fully bonded and delaminated circular
sandwich plates with laminated face sheets and a “soft” core. Int. J. Solids Struct.,
39:3057–3077, 2002.
[11] G. M. Kulikov and E. Carrera. Finite deformation higher-order shell models and rigid-body
motions. Int. J. Solids Struct., 45:3153–3172, 2008.
[12] L. Vu-Quoc and I. K. Ebcioğlu. General multilayer geometrically-exact beams/1-d plates with
deformable layer thickness: Equations of motion. Z. Angew. Math. Mech., 80:113–136, 2000.
[13] Y. Frostig, O. T. Thomsen, and I. Sheinman. On the non-linear high-order theory of
unidirectional sandwich panels with a transversely flexible core. Int. J. Solids Struct.,
42:1443–1463, 2005.
29
REFERENCES
REFERENCES
[14] R. A. Arciniega and J. N. Reddy. Large deformation analysis of functionally graded shells. Int.
J. Solids Struct., 44:2036–2052, 2007.
[15] R. A. Arciniega and J. N. Reddy. Tensor-based finite element formulation for geometrically
nonlinear analysis of shell structures. Comput. Methods Appl. Mech. Engrg., 196:1048–1073,
2007.
[16] J. Hohe and L. Librescu. Recent results on the effect of the transverse core compressibility on
the static and dynamic response of sandwich structures. Composites: Part B, 39:108–119,
2008.
30