On a Discontinuous Galerkin Method for Surface PDEs Pravin Madhavan
advertisement

On a Discontinuous Galerkin Method for Surface PDEs
Pravin Madhavan
(joint work with Andreas Dedner and Björn Stinner)
Mathematics and Statistics Centre for Doctoral Training
University of Warwick
Applied PDEs Seminar
University of Warwick, Coventry, 22nd January 2013
Motivation - PDEs on Surfaces
PDEs on surfaces arise in various areas, for instance
I
materials science: enhanced species diffusion along grain boundaries,
I
cell biology: phase separation on biomembranes, diffusion processes on plasma
membranes,
I
fluid dynamics: surface active agents.
Motivation - Numerical Approaches
Numerical methods are based on:
I
parametrisation of the surface (eg graph),
Motivation - Numerical Approaches
Numerical methods are based on:
I
parametrisation of the surface (eg graph),
I
level set representation,
Motivation - Numerical Approaches
Numerical methods are based on:
I
parametrisation of the surface (eg graph),
I
level set representation,
I
diffuse interface representation (phase field methods),
Motivation - Numerical Approaches
Numerical methods are based on:
I
parametrisation of the surface (eg graph),
I
level set representation,
I
diffuse interface representation (phase field methods),
I
this talk: intrinsic approach, approximation of the surface by triangulated surfaces
Motivation - Numerical Approaches
Numerical methods are based on:
I
parametrisation of the surface (eg graph),
I
level set representation,
I
diffuse interface representation (phase field methods),
I
this talk: intrinsic approach, approximation of the surface by triangulated surfaces
FEM methods:
[ Dziuk 1988 ]: elliptic problem,
[ Dziuk, Elliott 2007 ] (2 papers): parabolic problem (stationary/evolving surface).
advection dominated problem / hp-adaptive refinement
DG methods.
Motivation - Numerical Approaches
Numerical methods are based on:
I
parametrisation of the surface (eg graph),
I
level set representation,
I
diffuse interface representation (phase field methods),
I
this talk: intrinsic approach, approximation of the surface by triangulated surfaces
FEM methods:
[ Dziuk 1988 ]: elliptic problem,
[ Dziuk, Elliott 2007 ] (2 papers): parabolic problem (stationary/evolving surface).
advection dominated problem / hp-adaptive refinement
DG methods.
FEM
DG
Motivation - Numerical Approaches
Numerical methods are based on:
I
parametrisation of the surface (eg graph),
I
level set representation,
I
diffuse interface representation (phase field methods),
I
this talk: intrinsic approach, approximation of the surface by triangulated surfaces
FEM methods:
[ Dziuk 1988 ]: elliptic problem,
[ Dziuk, Elliott 2007 ] (2 papers): parabolic problem (stationary/evolving surface).
advection dominated problem / hp-adaptive refinement
DG methods.
Outline
1. Notation and Setting
2. DG Approximation
3. Convergence Proof
4. Numerical Tests
Outline
1. Notation and Setting
2. DG Approximation
3. Convergence Proof
4. Numerical Tests
Some Notation
I
Hypersurface: Γ ⊂ R3 compact, smooth, simply connected, oriented, no boundary.
I
Signed distance function: d : U → R with U a thin tube around Γ.
I
Unit normal: ν(ξ) = ∇d(ξ), ξ ∈ Γ.
I
Projection of R3 onto the tangent space Tξ Γ, ξ ∈ Γ:
P(ξ) := I − ν(ξ) ⊗ ν(ξ), ξ ∈ Γ.
I
Surface gradient: For any function η : U → R,
∇Γ η := ∇η − ∇η · νν = P∇η = (D1 η, D2 η, D3 η).
Strong Problem Formulation
Laplace-Beltrami operator:
∆Γ η := ∇Γ · (∇Γ η) =
3
X
Di Di η.
i=1
Strong problem: For a given function f : Γ → R, find u : Γ → R such that
−∆Γ u + u = f in Γ.
Strong Problem Formulation
Laplace-Beltrami operator:
∆Γ η := ∇Γ · (∇Γ η) =
3
X
Di Di η.
i=1
Strong problem: For a given function f : Γ → R, find u : Γ → R such that
−∆Γ u + u = f in Γ.
For weak formulation: Integration by parts formula on surfaces:
Z
Z
Z
η∇Γ · v = −
v · ∇Γ η + ηv · κ +
ηv · µ
Γ
Γ
∂Γ
where µ: outer co-normal of Γ on ∂Γ, κ: mean curvature vector.
Weak Problem Formulation
Sobolev spaces:
2
H m (Γ) := {u ∈ L2 (Γ) : ∇α
Γ u ∈ L (Γ) ∀|α| ≤ m}
with corresponding norm
1/2
kukH m (Γ) :=
X
2
k∇α
Γ ukL2 (Γ)
.
|α|≤m
Problem (PΓ ): Find u ∈ V := H 1 (Γ) such that
Z
Z
∇Γ u · ∇Γ v + uv dA =
fv dA, ∀v ∈ V .
Γ
Γ
Weak Problem Formulation
Sobolev spaces:
2
H m (Γ) := {u ∈ L2 (Γ) : ∇α
Γ u ∈ L (Γ) ∀|α| ≤ m}
with corresponding norm
1/2
kukH m (Γ) :=
X
2
k∇α
Γ ukL2 (Γ)
.
|α|≤m
Problem (PΓ ): Find u ∈ V := H 1 (Γ) such that
Z
Z
∇Γ u · ∇Γ v + uv dA =
fv dA, ∀v ∈ V .
Γ
Γ
Theorem (Aubin 1982)
If f ∈ L2 (Γ) then there is a unique weak solution u ∈ V to (PΓ ) which satisfies
kukH 2 (Γ) ≤ C kf kL2 (Γ) .
Outline
1. Notation and Setting
2. DG Approximation
3. Convergence Proof
4. Numerical Tests
Triangulated Surfaces
I
Γ is approximated by a polyhedral surface Γh composed of planar triangles Kh .
I
The vertices sit on Γ ⇒ Γh is its linear interpolation.
Th : Associated regular, conforming triangulation i.e.
[
Γh =
Kh .
I
Kh ∈Th
DG Setting
DG space:
Vh := vh ∈ L2 (Γh ) : vh K ∈ P 1 (Kh ) ∀Kh ∈ Th .
h
This space allows for jumps across edges, to be penalised in the DG method.
DG Setting
DG space:
Vh := vh ∈ L2 (Γh ) : vh K ∈ P 1 (Kh ) ∀Kh ∈ Th .
h
This space allows for jumps across edges, to be penalised in the DG method.
I
Set of edges: Eh .
I
Unit conormals: nh+ , nh− to Kh+ , Kh− on eh ∈ Eh .
I
Trace values: vh± := vh |∂K ± for vh ∈ Vh .
h
DG Setting
DG space:
Vh := vh ∈ L2 (Γh ) : vh K ∈ P 1 (Kh ) ∀Kh ∈ Th .
h
This space allows for jumps across edges, to be penalised in the DG method.
I
Set of edges: Eh .
I
Unit conormals: nh+ , nh− to Kh+ , Kh− on eh ∈ Eh .
I
Trace values: vh± := vh |∂K ± for vh ∈ Vh .
h
DG norm:
X
|uh |21,h :=
kuh k2H 1 (K ) ,
h
Kh ∈Th
kuh k2DG (Γ )
h
:=
|uh |21,h
+
|uh |2∗,h :=
|uh |2∗,h .
X
eh ∈Eh
he−1
kuh+ − uh− k2L2 (e ) ,
h
h
DG Problem
Problem (PDG
Γ ): Find uh ∈ Vh such that
h
aΓDG
(uh , vh ) =
h
Z
fh vh dAh ∀vh ∈ Vh
Γh
where fh is related to f (later) and
X Z
aΓDG
(uh , vh ) :=
∇Γh uh · ∇Γh vh + uh vh dAh
h
Kh ∈Th
−
Kh
X Z
eh ∈Eh
eh
X Z
1
(uh+ − uh− ) (∇Γh vh+ · nh+ − ∇Γh vh− · nh− ) dsh
2
1
(vh+ − vh− ) (∇Γh uh+ · nh+ − ∇Γh uh− · nh− ) dsh
2
eh ∈Eh eh
Z
X
+
βeh (uh+ − uh− )(vh+ − vh− ) dsh
−
eh ∈Eh
with βeh ∼ he−1
.
h
eh
DG Problem
Problem (PDG
Γ ): Find uh ∈ Vh such that
h
aΓDG
(uh , vh ) =
h
Z
fh vh dAh ∀vh ∈ Vh
Γh
where fh is related to f (later) and
X Z
aΓDG
(uh , vh ) :=
∇Γh uh · ∇Γh vh + uh vh dAh
h
Kh ∈Th
−
Kh
X Z
eh ∈Eh
eh
1
(uh+ − uh− ) (∇Γh vh+ · nh+ − ∇Γh vh− · nh− ) dsh
2
X Z
1
(vh+ − vh− ) (∇Γh uh+ · nh+ − ∇Γh uh− · nh− ) dsh
2
eh ∈Eh eh
Z
X
+
βeh (uh+ − uh− )(vh+ − vh− ) dsh
−
eh ∈Eh
eh
with βeh ∼ he−1
.
h
Interior penalty method [ Arnold 1982 ]: If βeh = ωeh he−1
and ωeh big enough
h
then aΓDG is coercive, and there is a unique solution uh ∈ Vh to problem (PDG
Γ ) with
h
h
kuh kDG (Γh ) ≤ C kfh kL2 (Γh ) .
DG Problem: Remark
[ Arnold 1982 ] (classical) IP method:
X Z
aΓDG
(u
,
v
)
:=
∇Γh uh · ∇Γh vh + uh vh dAh
h
h
h
Kh ∈Th
Kh
X Z
1
(uh+ − uh− ) (∇Γh vh+ · nh+ − ∇Γh vh− · nh− ) dsh
2
eh ∈Eh eh
Z
X
1
−
(vh+ − vh− ) (∇Γh uh+ · nh+ − ∇Γh uh− · nh− ) dsh
2
e
h
eh ∈Eh
X Z
+
βeh (uh+ − uh− )(vh+ − vh− ) dsh
−
eh
eh ∈Eh
[ Arnold et al. 2002 ] (standard) IP method:
X Z
aΓDG
(u
,
v
)
:=
∇Γh uh · ∇Γh vh + uh vh dAh
h
h
h
Kh ∈Th
−
Kh
X Z
eh ∈Eh
−
eh ∈Eh
+
eh
X Z
eh
X Z
eh ∈Eh
eh
(uh+ nh+ + uh− nh− ) ·
1
(∇Γh vh+ + ∇Γh vh− ) dsh
2
(vh+ nh+ − vh− nh− ) ·
1
(∇Γh uh+ + ∇Γh uh− ) dsh
2
βeh (uh+ nh+ + uh− nh− ) · (vh+ nh+ + vh− nh− ) dsh
The Lift
Goal: Compare u ∈ H 2 (Γ) solving (PΓ ) with uh ∈ Vh solving (PDG
Γ ), but Γh 6⊂ Γ.
h
Lift: For η : Γh → R define
η l (ξ) := η(x)
where
x = ξ + d(x)ν(ξ)
The Lift
Goal: Compare u ∈ H 2 (Γ) solving (PΓ ) with uh ∈ Vh solving (PDG
Γ ), but Γh 6⊂ Γ.
h
Lift: For η : Γh → R define
η l (ξ) := η(x)
where
x = ξ + d(x)ν(ξ)
One-to-one relation between Γ and Γh , write
x = x(ξ) or ξ = ξ(x).
Right hand side:
Define fh so that fhl = f on Γ.
Lifted Objects
I
Lifted triangles: Khl = ξ(Kh ) ⊂ Γ.
I
Conforming triangulation Thl ,
Γ=
[
Khl .
Khl ∈Thl
I
Lifted edges: ehl := ξ(eh ) ∈ Ehl .
Lifted Objects
I
Lifted triangles: Khl = ξ(Kh ) ⊂ Γ.
I
Conforming triangulation Thl ,
Γ=
[
Khl .
Khl ∈Thl
I
Lifted edges: ehl := ξ(eh ) ∈ Ehl .
Lifted DG space:
Vhl := {vhl ∈ L2 (Γ) : vhl (ξ) = vh (x(ξ)) with some vh ∈ Vh },
norm:
kvhl k2DG (Γ) :=
X
Khl ∈Thl
kvhl k2H 1 (K l ) +
h
X
ehl ∈Ehl
l,+
h−1
− vhl,− k2L2 (e l )
l kvh
eh
h
DG Bilinear Form on Γ
Consider
aΓDG (u, v ) :=
X Z
Khl ∈Thl
−
Khl
X Z
ehl
ehl ∈Ehl
−
X Z
ehl
ehl ∈Ehl
+
I
1
(u + − u − ) (∇Γ v + · n+ − ∇Γ v − · n− ) ds
2
1
(v + − v − ) (∇Γ u + · n+ − ∇Γ u − · n− ) ds
2
X Z
ehl ∈Ehl
I
∇Γ u · ∇Γ v + uv dA
ehl
βe l (u + − u − )(v + − v − ) ds
h
Unit conormals to Khl+ and Khl− on
ehl ∈ Ehl : n+ = −n− ∈ Tξ Γ.
Penalty parameters βe l :=
h
βeh
δeh
.
Convergence Statement
Theorem (Dedner, M., Stinner 2012)
Let u ∈ H 2 (Γ) and uh ∈ Vh denote the solutions to (PΓ ) and (PDG
Γ ), respectively.
h
Denote by uhl ∈ Vhl the lift of uh onto Γ. Then
ku − uhl kL2 (Γ) + hku − uhl kDG (Γ) ≤ Ch2 kf kL2 (Γ) .
Outline
1. Notation and Setting
2. DG Approximation
3. Convergence Proof
4. Numerical Tests
Outline of the Proof
1. Starting:
ku − uhl kDG (Γ) ≤ ku − φlh kDG (Γ) + kφlh − uhl kDG (Γ) ,
φlh = Ihl u interpolate.
Outline of the Proof
1. Starting:
ku − uhl kDG (Γ) ≤ ku − φlh kDG (Γ) + kφlh − uhl kDG (Γ) ,
φlh = Ihl u interpolate.
2. Interpolation estimate [ Dziuk 1988 ]:
ku − φlh kDG (Γ) = ku − φlh kH 1 (Γ) ≤ ChkukH 2 (Γ)
≤ Chkf kL2 (Γ) .
Outline of the Proof
1. Starting:
ku − uhl kDG (Γ) ≤ ku − φlh kDG (Γ) + kφlh − uhl kDG (Γ) ,
φlh = Ihl u interpolate.
2. Interpolation estimate [ Dziuk 1988 ]:
ku − φlh kDG (Γ) = ku − φlh kH 1 (Γ) ≤ ChkukH 2 (Γ)
≤ Chkf kL2 (Γ) .
3. Using coercivity in Vhl :
Csl kφlh − uhl k2DG (Γ) ≤ aΓDG (φlh − uhl , φlh − uhl )
= aΓDG (φlh − u, φlh − uhl ) + aΓDG (u − uhl , φlh − uhl ).
Outline of the Proof
1. Starting:
ku − uhl kDG (Γ) ≤ ku − φlh kDG (Γ) + kφlh − uhl kDG (Γ) ,
φlh = Ihl u interpolate.
2. Interpolation estimate [ Dziuk 1988 ]:
ku − φlh kDG (Γ) = ku − φlh kH 1 (Γ) ≤ ChkukH 2 (Γ)
≤ Chkf kL2 (Γ) .
3. Using coercivity in Vhl :
Csl kφlh − uhl k2DG (Γ) ≤ aΓDG (φlh − uhl , φlh − uhl )
= aΓDG (φlh − u, φlh − uhl ) + aΓDG (u − uhl , φlh − uhl ).
4. Using boundedness in H 2 (Γ) + Vhl :
aΓDG (φlh − u, φlh − uhl ) ≤ Cbl kφlh − ukDG (Γ) + h2 kukH 2 (Γ) kφlh − uhl kDG (Γ) .
Outline of the Proof
1. Starting:
ku − uhl kDG (Γ) ≤ ku − φlh kDG (Γ) + kφlh − uhl kDG (Γ) ,
φlh = Ihl u interpolate.
2. Interpolation estimate [ Dziuk 1988 ]:
ku − φlh kDG (Γ) = ku − φlh kH 1 (Γ) ≤ ChkukH 2 (Γ)
≤ Chkf kL2 (Γ) .
3. Using coercivity in Vhl :
Csl kφlh − uhl k2DG (Γ) ≤ aΓDG (φlh − uhl , φlh − uhl )
= aΓDG (φlh − u, φlh − uhl ) + aΓDG (u − uhl , φlh − uhl ).
4. Using boundedness in H 2 (Γ) + Vhl :
aΓDG (φlh − u, φlh − uhl ) ≤ Cbl kφlh − ukDG (Γ) + h2 kukH 2 (Γ) kφlh − uhl kDG (Γ) .
5. Estimating variational crime error:
aΓDG (u − uhl , φlh − uhl ) ≤ Ch2 kf kL2 (Γ) kφlh − uhl kDG (Γ) .
Outline of the Proof
1. Starting:
ku − uhl kDG (Γ) ≤ ku − φlh kDG (Γ) + kφlh − uhl kDG (Γ) ,
φlh = Ihl u interpolate.
2. Interpolation estimate [ Dziuk 1988 ]:
ku − φlh kDG (Γ) = ku − φlh kH 1 (Γ) ≤ ChkukH 2 (Γ)
≤ Chkf kL2 (Γ) .
3. Using coercivity in Vhl :
Csl kφlh − uhl k2DG (Γ) ≤ aΓDG (φlh − uhl , φlh − uhl )
= aΓDG (φlh − u, φlh − uhl ) + aΓDG (u − uhl , φlh − uhl ).
4. Using boundedness in H 2 (Γ) + Vhl :
aΓDG (φlh − u, φlh − uhl ) ≤ Cbl kφlh − ukDG (Γ) + h2 kukH 2 (Γ) kφlh − uhl kDG (Γ) .
5. Estimating variational crime error:
aΓDG (u − uhl , φlh − uhl ) ≤ Ch2 kf kL2 (Γ) kφlh − uhl kDG (Γ) .
6. Concluding:
ku − uhl kDG (Γ) ≤ (1 + C )kφlh − ukH 1 (Γ) + Ch2 kukH 2 (Γ) + Ch2 kf kL2 (Γ) ≤ Chkf kL2 (Γ) .
Coercivity and Boundedness: Inverse Estimate
3. Using coercivity in Vhl :
Csl kφlh − uhl k2DG (Γ) ≤ aΓDG (φlh − uhl , φlh − uhl )
= aΓDG (φlh − u, φlh − uhl ) + aΓDG (u − uhl , φlh − uhl ).
4. Using boundedness in H 2 (Γ) + Vhl :
aΓDG (φlh − u, φlh − uhl ) ≤ Cbl kφlh − ukDG (Γ) + h2 kukH 2 (Γ) kφlh − uhl kDG (Γ) .
Lemma (Inverse Estimate)
Let w ∈ H 2 (Γ) and whl ∈ Vhl . Let Khl ∈ Thl . Then for sufficiently small h,
k∇Γ (w + whl )k2L2 (∂K l ) ≤ C
h
1
k∇Γ (w + whl )k2L2 (K l ) + hkw k2H 2 (K l )
h
h
h
.
Coercivity and Boundedness: Inverse Estimate
3. Using coercivity in Vhl :
Csl kφlh − uhl k2DG (Γ) ≤ aΓDG (φlh − uhl , φlh − uhl )
= aΓDG (φlh − u, φlh − uhl ) + aΓDG (u − uhl , φlh − uhl ).
4. Using boundedness in H 2 (Γ) + Vhl :
aΓDG (φlh − u, φlh − uhl ) ≤ Cbl kφlh − ukDG (Γ) + h2 kukH 2 (Γ) kφlh − uhl kDG (Γ) .
Lemma (Inverse Estimate)
Let w ∈ H 2 (Γ) and whl ∈ Vhl . Let Khl ∈ Thl . Then for sufficiently small h,
k∇Γ (w + whl )k2L2 (∂K l ) ≤ C
h
1
k∇Γ (w + whl )k2L2 (K l ) + hkw k2H 2 (K l )
h
h
h
.
Proof.
Trace theorem and a standard scaling argument on Kh ∈ Th , lift estimate onto
Khl ∈ Thl using result in [ Demlow 2009 ] and apply geometric estimates.
Variational Crime Error: Geometric Estimates
5. Estimating variational crime error:
aΓDG (u − uhl , φlh − uhl ) ≤ Ch2 kf kL2 (Γ) kφlh − uhl kDG (Γ) .
aΓDG (u − uhl , whl )
X Z
1
1
− 1 uhl whl + 1 −
fwhl dA
=
(Rh − P)∇Γ uhl · ∇Γ whl +
l
δh
δh
l
l Kh
Kh ∈Th
+
X Z
ehl ∈Ehl
ehl
(uhl+ − uhl− )
1
1
∇Γ whl+ · n+ −
P(I − dH)nhl+
2
δe h
1
P(I − dH)nhl− ds
δe h
X Z
1
1
+
(whl+ − whl− ) ∇Γ uhl+ · n+ −
P(I − dH)nhl+
l
2
δ
e
eh
h
l
l
− ∇Γ whl− · n− −
eh ∈Eh
− ∇Γ uhl− · n− −
1
P(I − dH)nhl− ds.
δe h
Variational Crime Error: Geometric Estimates
5. Estimating variational crime error:
aΓDG (u − uhl , φlh − uhl ) ≤ Ch2 kf kL2 (Γ) kφlh − uhl kDG (Γ) .
Lemma (Dziuk 1988 and Giesselman & Mueller 2012)
kdkL∞ (Γ) ≤ Ch2 ,
k1 − δh kL∞ (Γ) ≤ Ch2 ,
kν − νh kL∞ (Γ) ≤ Ch,
k1 − δeh kL∞ (E l )) ≤ Ch2 ,
h
δh : local area change, δh dAh = dA,
ν, νh : unit normals on Γ and Γh ,
δeh : local length change, δeh dsh = ds,
kn − Pnhl kL∞ (E l ) ≤ Ch2 ,
h
kP − Rh kL∞ (Γ) ≤ Ch2
where Rh :=
2
1
P(I
δh
− dH)Ph (I − dH)
with H = ∇ d and Ph = I − νh ⊗ νh .
Outline
1. Notation and Setting
2. DG Approximation
3. Convergence Proof
4. Numerical Tests
Software
I
All simulations have been performed using the Distributed and Unified Numerics
Environment (DUNE).
I
Initial mesh generation made use of 3D surface mesh generation module of the
Computational Geometry Algorithms Library (CGAL).
I
Further information about DUNE and CGAL can be found respectively on
http://www.dune-project.org/ and http://www.cgal.org/
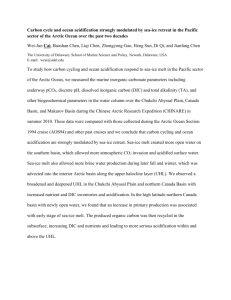
Test Problem on Unit Sphere
Surface Helmholtz equation:
−∆Γ u + u = f
on the unit sphere
Γ = {x ∈ R3 : |x| = 1}.
The right-hand side f is chosen such that
u(x1 , x2 , x3 ) = cos(2πx1 ) cos(2πx2 ) cos(2πx3 )
is the exact solution.
EOCs for Sphere Test Problem
Elements
623
2528
10112
40448
161792
647168
h
0.223929
0.112141
0.0560925
0.028049
0.0140249
0.00701247
L2 -error
0.171459
0.0528817
0.0146074
0.00378277
0.000957472
0.000240483
L2 -eoc
1.70
1.86
1.95
1.98
1.99
DG -error
5.07662
2.64273
1.3151
0.653612
0.325961
0.162822
DG -eoc
0.94
1.01
1.01
1.00
1.00
Visualisation, Sphere Test Problem
Can easily work with non-conforming grid:
Test Problem on Dziuk Surface
Solve the Helmholtz equation
on the Dziuk surface
Γ = {x ∈ R3 : (x1 − x32 )2 + x22 + x32 = 1}.
The right-hand side f is chosen such that
u(x) = x1 x2
is the exact solution.
EOCs for Dziuk Surface
Elements
92
368
1472
5888
23552
94208
376832
1507328
h
0.704521
0.353599
0.176993
0.0885231
0.0442651
0.022133
0.0110666
0.0055333
L2 -error
0.243493
0.0842372
0.0268596
0.00637826
0.00171047
0.00041636
0.00010427
2.60734e-05
L2 -eoc
1.53
1.65
2.07
1.90
2.04
2.00
2.00
DG -error
0.894504
0.490805
0.263808
0.135162
0.0685366
0.0343677
0.0171891
0.0085934
DG -eoc
0.87
0.90
0.97
0.98
1.00
1.00
1.00
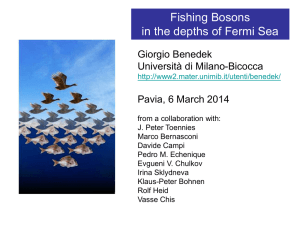
Test Problem on Enzensberger-Stern Surface
Solve the Helmholtz equation
on the Enzensberger-Stern surface
Γ = {x ∈ R3 : 400(x 2 y 2 + y 2 z 2 + x 2 z 2 ) − (1 − x 2 − y 2 − z 2 )3 − 40 = 0.}
The right-hand side f is again chosen such that
u(x) = x1 x2 is the exact solution.
EOCs for Enzensberger-Stern Surface
Elements
2358
9432
37728
150912
603648
2414592
h
0.163789
0.0817973
0.040885
0.0204411
0.0102204
0.00511
L2 -error
0.476777
0.175293
0.0160606
0.00139698
0.000338462
7.86713e-05
L2 -eoc
1.44
3.45
3.52
2.04
2.10
DG -error
0.998066
0.472241
0.150144
0.0703901
0.0347345
0.0172348
DG -eoc
1.08
1.65
1.09
1.02
1.01
Tricky: The computation of the lifted points ξ(x) when refining the surface.
The EOC rates thus are a bit more volatile.
Other Choices for the Conormals
Generalise the bilinear form:
X Z
1
ãΓDG
(uh , vh ) := −
(uh+ − uh− ) (∇Γh vh+ · ne+h − ∇Γh vh− · ne−h ) dsh
h
2
e
h
eh ∈Eh
X Z
1
−
(vh+ − vh− ) (∇Γh uh+ · ne+h − ∇Γh uh− · ne−h ) dsh
2
e
h
e ∈E
h
h
Choice
ne−
ne+
Description
1
2
nh−
nh−
−nh−
nh+
planar (non-sym)
[ Arnold 1982 ] (sym pos-def)
3
4
h
1 (n− −n+ )
2 h
h
−
| 1 (n −n+ )|
2 h
h
+
−nh
h
1 (n+ −n− )
2 h
h
−
| 1 (n+ −n )|
2 h
h
−
−nh
averaged (sym pos-def)
[ Arnold et al. 2002 ] (sym pos-def)
+ ...
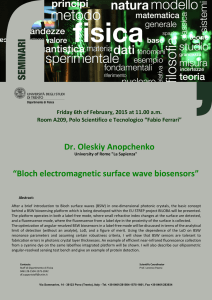
Comparison of Choices
Ratio of L2 and DG errors for the test problem on the Enzensberger-Stern surface,
benchmark is the analysed choice 2.
Comparison of Choices
Ratio of L2 and DG errors for the test problem on the Enzensberger-Stern surface,
benchmark is the analysed choice 2.
The [ Arnold et al. 2002 ] (standard) IP method did not converge!
Conclusion
I
The (classical) IP method from [ Arnold 1982 ] can be ’lifted to surfaces’.
Conclusion
I
The (classical) IP method from [ Arnold 1982 ] can be ’lifted to surfaces’.
I
A priori error analysis requires estimation of additional terms
in comparison with [ Dziuk 1988 ].
Conclusion
I
The (classical) IP method from [ Arnold 1982 ] can be ’lifted to surfaces’.
I
A priori error analysis requires estimation of additional terms
in comparison with [ Dziuk 1988 ].
I
The expected order of convergence is obtained and observed.
Conclusion
I
The (classical) IP method from [ Arnold 1982 ] can be ’lifted to surfaces’.
I
A priori error analysis requires estimation of additional terms
in comparison with [ Dziuk 1988 ].
I
The expected order of convergence is obtained and observed.
I
Numerics suggest that the (standard) IP method from [ Arnold et al. 2002 ]
cannot be ’lifted to surfaces’.
Conclusion
I
The (classical) IP method from [ Arnold 1982 ] can be ’lifted to surfaces’.
I
A priori error analysis requires estimation of additional terms
in comparison with [ Dziuk 1988 ].
I
The expected order of convergence is obtained and observed.
I
Numerics suggest that the (standard) IP method from [ Arnold et al. 2002 ]
cannot be ’lifted to surfaces’.
Open: Analysis for nonconforming meshes,
higher order methods (extend [ Demlow 2009 ]),
hp-adaptive a posteriori error analysis and refinement
(extend [ Demlow & Dziuk 2008 ] and [ Houston et al. 2007 ]).
I
Conclusion
I
The (classical) IP method from [ Arnold 1982 ] can be ’lifted to surfaces’.
I
A priori error analysis requires estimation of additional terms
in comparison with [ Dziuk 1988 ].
I
The expected order of convergence is obtained and observed.
I
Numerics suggest that the (standard) IP method from [ Arnold et al. 2002 ]
cannot be ’lifted to surfaces’.
Open: Analysis for nonconforming meshes,
higher order methods (extend [ Demlow 2009 ]),
hp-adaptive a posteriori error analysis and refinement
(extend [ Demlow & Dziuk 2008 ] and [ Houston et al. 2007 ]).
I
ku − uhl kDG (Γ) ≤C
X
Kh ∈Th
2
kRh kl 2 ,L∞ (wK ) ηK
+k
h
h
p
βeh [uh ]k2L2 (∂K
1/2
+ higher order geometric terms
.
h)
Conclusion
I
The (classical) IP method from [ Arnold 1982 ] can be ’lifted to surfaces’.
I
A priori error analysis requires estimation of additional terms
in comparison with [ Dziuk 1988 ].
I
The expected order of convergence is obtained and observed.
I
Numerics suggest that the (standard) IP method from [ Arnold et al. 2002 ]
cannot be ’lifted to surfaces’.
Open: Analysis for nonconforming meshes,
higher order methods (extend [ Demlow 2009 ]),
hp-adaptive a posteriori error analysis and refinement
(extend [ Demlow & Dziuk 2008 ] and [ Houston et al. 2007 ]).
I
ku − uhl kDG (Γ) ≤C
X
Kh ∈Th
2
kRh kl 2 ,L∞ (wK ) ηK
+k
h
h
p
βeh [uh ]k2L2 (∂K
1/2
+ higher order geometric terms
.
Thanks for your attention!
Acknowledgement:
grant EP/H023364/1
h)