AN ABSTRACT OF THE THESIS OF
Blake C. Boren for the degree of Master of Science in Mechanical Engineering
presented on June 5, 2013.
Title: On the Modeling and Control of Horizontal Pendulum Wave Energy
Converters
Abstract approved:
Belinda A. Batten
Presented is an investigation into the modeling, active control design, and simulation of a generic horizontal pendulum wave energy converter, known as a PWEC. A
description is provided of the dominant attributes PWECs have, showcasing their
promising potential as wave energy converters. Seeking to further promote this
potential, an active control strategy for the PWEC pendulum dynamics is sought
such that net electric power production is increased. Constrained equations of
motion for a generic PWEC archetype are developed. Equations describing an irregular wave environment reminiscent of Oregon State’s oceans are derived. Wave
forces and moments acting on the PWEC model are then obtained through use
of potential flow theory and paneling methods. Finally, developments of an active
control strategy enforced by a controller based on techniques relating to optimal
and model predictive control theory are given. Simulation of the generic PWEC
occurs within the modeled irregular wave environment both with and without the
active control engaged. Comparisons of the simulations indicate strong increases
in net PWEC electric power generation by actively controlling the PWEC pendulum’s dynamics. Future pathways for active control development and PWEC
advancement are then proposed.
c
Copyright by Blake C. Boren
June 5, 2013
All Rights Reserved
On the Modeling and Control of Horizontal Pendulum Wave
Energy Converters
by
Blake C. Boren
A THESIS
submitted to
Oregon State University
in partial fulfillment of
the requirements for the
degree of
Master of Science
Presented June 5, 2013
Commencement June 2013
Master of Science thesis of Blake C. Boren presented on June 5, 2013.
APPROVED:
Major Professor, representing Mechanical Engineering
Head of the School of Mechanical, Industrial, and Manufacturing Engineering
Dean of the Graduate School
I understand that my thesis will become part of the permanent collection of
Oregon State University libraries. My signature below authorizes release of my
thesis to any reader upon request.
Blake C. Boren, Author
ACKNOWLEDGEMENTS
In addition to expressing specific gratitude to graduate advisor Dr. Belinda Batten,
the author would also like to acknowledge the support and encouragement from
members of Oregon State University’s Marine Renewable Energy Laboratory in
addition to Sandia National Laboratories’ Water Power Department. This work
is supported by the United States Department of Energy under Award Number
DE-FG36-08G018179.
TABLE OF CONTENTS
Page
1 Introduction
1
1.1 Horizontal Pendulum Based Wave Energy Converters . . . . . . . . .
2
1.2 Contributions of Thesis . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2 Literature Review
8
2.1 Ocean Wave Energy . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Wave Energy Converters . . . . . . . . . .
2.2.1 Attenuator . . . . . . . . . . . . .
2.2.2 Heaving Point Absorber . . . . .
2.2.3 Terminator . . . . . . . . . . . . .
2.2.4 Submerged Pressure Differential .
2.2.5 Oscillating Wave Surge Converter
2.2.6 Oscillating Water Column . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
9
.
.
.
.
.
.
.
11
12
14
16
17
18
19
2.3 Wave Energy Research at Oregon State University . . . . . . . . . . .
20
2.4 Research and Investigations Regarding PWECs . . . . . . . . . . . .
21
3 Modeling a Generic PWEC
30
3.1 Cursory Investigation of PWEC Dynamics . . . . . . . . . . . . . . .
31
3.2 Equations of Motion . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Generic PWEC’s Lagrangian . . . . . . . . . . . . .
3.2.2 Equation of Motion for Generic PWEC’s Pendulum
3.2.3 Equation of Motion for Generic PWEC in Heave . .
3.2.4 Equation of Motion for Generic PWEC in Pitch . .
3.2.5 Hydrostatic Terms . . . . . . . . . . . . . . . . . .
3.2.6 Hydrodynamic Terms . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
33
34
36
38
39
39
40
3.3 Characterization of the Generic PWEC’s Dynamics . . . . . . . . . .
41
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4 Modeling An Ocean Wave Environment
44
4.1 Regular Ocean Waves . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
4.2 Irregular Ocean Waves . . . . . . . . . . . . . . . . . . . . . . . . . .
48
TABLE OF CONTENTS (Continued)
Page
5 Modeling Marine Hydrodynamics
52
5.1 PWEC’s Marine Hydrodynamics . . . . . . . . . . . . . . . . . . . .
6 Modeling Control for Generic PWEC
55
59
6.1 Control Strategy . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
6.2 Controller Design . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 2nd Order to 1st Order Conversion—Pendulum’s EOMs
6.2.2 Model Predictive Controller . . . . . . . . . . . . . . .
6.2.3 Integral Error Controller . . . . . . . . . . . . . . . . .
6.2.4 Combining Controllers via LQR Control Theory . . . .
61
63
64
65
66
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7 Simulation Results Of A Generic PWEC
69
7.1 Reference Function Development . . . . . . . . . . . . . . . . . . . .
7.1.1 Reference Function Generation—Regular Waves . . . . . . .
7.1.2 Reference Function—Irregular Wave . . . . . . . . . . . . . .
71
72
75
7.2 Uncontrolled Pendulum Generic PWEC Simulation Results . . . . . .
76
7.3 Actively Unidirectional Pendulum Controlled Generic PWEC Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
80
7.4 Actively Bidirectional Pendulum Controlled Generic PWEC Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
8 Conclusion
8.1 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bibliography
90
91
93
LIST OF FIGURES
Figure
Page
1.1
A Generic PWEC Archetype with its Five Major Components . . .
3
1.2
Wello’s PenguinTM Horizontal Pendulum Wave Energy Converter .
4
1.3
Neptune Wave Power’s Horizontal Pendulum Wave Energy Converter
5
2.1
Global Annual Mean Wave Power Estimates . . . . . . . . . . . . .
10
2.2
Pelamis Wave Energy Converter . . . . . . . . . . . . . . . . . . . .
13
2.3
Ocean Power Technology PowerBuoy . . . . . . . . . . . . . . . . .
15
2.4
Salters Duck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.5
Archimedes Wave Swing . . . . . . . . . . . . . . . . . . . . . . . .
17
2.6
AquamarinePowerOyster . . . . . . . . . . . . . . . . . . . . . . . .
18
2.7
Oscillating Water Column . . . . . . . . . . . . . . . . . . . . . . .
19
2.8
First (1966) Patented Horizontally Pendulum Based Wave Energy
Converter - Thiokol Wave Power Generator . . . . . . . . . . . . . .
22
Neptune Wave Power’s PWEC Control System Overview . . . . . .
24
2.10 James G. Bretl’s Bifurcation Plot . . . . . . . . . . . . . . . . . . .
27
3.1
Generic PWEC Free Body Diagram . . . . . . . . . . . . . . . . . .
32
3.2
Natural Frequency of pendulum as a Function of Hull Pitch . . . .
42
3.3
Example Bifurcation Plot of a Parametric Pendulum . . . . . . . .
43
4.1
Regular Ocean Wave . . . . . . . . . . . . . . . . . . . . . . . . . .
48
4.2
Irregular Ocean Wave . . . . . . . . . . . . . . . . . . . . . . . . . .
49
5.1
Regions of Applicability for Excitation Force Determination . . . .
54
5.2
Pressure Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
5.3
Hull Pressure Panels . . . . . . . . . . . . . . . . . . . . . . . . . .
57
2.9
LIST OF FIGURES (Continued)
Figure
Page
6.1
Pendulum Control Strategy . . . . . . . . . . . . . . . . . . . . . .
60
7.1
PWEC in Heave
70
7.2
Orientation of Bidirectional Pendulum Controlled PWEC in Pitch
70
7.3
Flow Chart Representing the Paths Taken for Simulations . . . . .
71
7.4
Regular Wave Slope Plot with Crest and Trough Markers
. . . . .
73
7.5
Regular Wave Reference Function
. . . . . . . . . . . . . . . . . .
74
7.6
Irregular Wave Slope Plot with Crest and Trough Markers . . . . .
75
7.7
Irregular Wave Reference Function . . . . . . . . . . . . . . . . . .
76
7.8
Angular Position of Uncontrolled Pendulum . . . . . . . . . . . . .
78
7.9
Angular Velocity of Uncontrolled Pendulum . . . . . . . . . . . . .
78
7.10 Generator Moment of Uncontrolled Pendulum . . . . . . . . . . . .
79
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.11 Net Electric Power Generated from an Uncontrolled Generic PWEC 79
7.12 Angular Position of Unidirectional Pendulum Controlled Pendulum
82
7.13 Angular Velocity of Unidirectional Pendulum Controlled Pendulum
82
7.14 Generator Moment of Unidirectional Pendulum Controlled Pendulum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
7.15 Net Electric Power Generated from an Unidirectional Pendulum
Controlled Generic PWEC . . . . . . . . . . . . . . . . . . . . . .
84
7.16 Angular Position of Bidirectional Pendulum Controlled Pendulum .
87
7.17 Angular Velocity of Bidirectional Pendulum Controlled Pendulum .
87
7.18 Generator Moment of Bidirectional Pendulum Controlled Pendulum 88
7.19 Net Electric Power Generated from an Bidirectional Pendulum Controlled Generic PWEC . . . . . . . . . . . . . . . . . . . . . . . . .
89
LIST OF TABLES
Table
Page
5.1
Valid Method Regions for Excitation Force Determination [1–3] . .
7.1
Simulation Results of Uncontrolled Generic PWEC in Irregular Waves 77
7.2
Simulation Results of a Generic PWEC in Irregular Waves with an
Actively Unidirectional Controlled Pendulum . . . . . . . . . . . . .
81
Simulation Results of an Actively Controlled Bidirectional Generic
PWEC in Irregular Waves . . . . . . . . . . . . . . . . . . . . . . .
86
7.3
55
NOMENCLATURE
D
D
D
L
≡
Lagrangian of the multi-body system: The generic PWEC
Ttotal
≡
total kinetic energy of system
Vtotal
≡
total potential energy of system
Th
≡
kinetic energy of PWEC hull
Tp
≡
kinetic energy of PWEC pendulum
Vh
≡
potential energy of PWEC hull
Vp
E
≡
potential energy of PWEC pendulum
≡
Earth fixed reference frame
X1 , Y1 , Z1
E
≡
PWEC hull body fixed reference frame
X2 , Y2 , Z2
E
≡
pendulum body fixed reference frame
mh
≡
mass of PWEC without pendulum
Iy0 h
≡
PWEC hull’s moment of inertia about Y0 axis
mp
≡
mass of pendulum
g
≡
acceleration due to gravity
Z0h
≡
Z0 component of PWEC’s hull position; hull heave position
θ
≡
angular position of PWEC’s hull about the Y0 axis; pitch of PWEC
Z0p
≡
Z0 component of pendulum’s position
X1p
≡
position of pendulum with respect to X1 axis
Y1p
≡
position of pendulum with respect to Y1 axis
φ
≡
angular position of pendulum about the Z1 axis
Rp
≡
pendulum arm length
X0 , Y0 , Z0
NOMENCLATURE
A
≡
center of mass of generic PWEC without pendulum
B
≡
center of mass of generic PWEC’s pendulum
Md
≡
viscous damping moment affecting pendulum
Mgen
≡
moment due to generator
FEH
≡
wave excitation force in heave; along Z0
FRH
≡
radiation force in heave; along Z0
MEP
≡
wave excitation moment in pitch; about Y0
MRP
≡
radiation moment in heave; along Y0
maH
≡
added inertia of generic PWEC’s hull in heave
CdH
≡
damping of generic PWEC’s hull in heave
IaP
≡
added inertia of generic PWEC’s hull in pitch
CdP
≡
damping of generic PWEC’s hull in pitch
Cb
≡
viscous damping coefficient due to pendulum bearings
t
≡
time in seconds
mn
≡
the n spectral moment
f
≡
wave frequency [hz]
σ = 2πf
≡
wave angular frequency [rads/s]
S(f )
≡
spectral density of wave in one dimension [m2 · s]
Hm0 = Hs = H1/3
≡
significant wave height
Ts = T1/3
≡
significant wave period
T−10 = Te
≡
wave energy period
Pw
≡
wave power per meter of crest length
η
≡
water surface displacement; wave profile
H
≡
wave height of a monochromatic wave
Φ
≡
velocity potential of a progressive wave
z0
≡
location along the Z0 axis
NOMENCLATURE
p
≡
ρ
≡
pressure under a wave profile η
kg density of sea water; 1025 m
3
k
≡
wavenumber
j
≡
frequency bin number
N
≡
number of frequency bins
δj
≡
random phase, [0, 2π], for frequency bin j
h
≡
water depth; usually set at 100 meters in this work
x0
≡
location along the X0 axis
pD
≡
dynamic pressure
γ
≡
coefficient parameter for isolines of pressure field
FBP
≡
buoyancy force
MBH
≡
buoyancy moment
CP
≡
center of pressure position vector
D
≡
diameter of PWEC hull
Aw
≡
wetted surface area of hull
V
– dw
≡
displaced volume of water caused by PWEC
F~E
≡
excitation force vector
FEz0
≡
heave component of excitation force
F~i
≡
panel i force vector
Np
≡
number of pressure panels
pDi
≡
dynamic pressure acting on panel i
Ai
≡
area of panel i
~nin
≡
inward normal vector of panel i
short-scale
≡
number naming system in which new terms greater than
one million is 1,000 times greater than the previous term.
Never let your sense of morals prevent you from doing what is right.
– Isaac Asimov, Foundation
Chapter 1: Introduction
This work presents the modeling and active controller design for a generic horizontal pendulum wave energy converter (known as a PWEC) that is constrained to
move in only heave and pitch. The purpose of which, is to investigate and strive
for an active control scheme such that the PWEC’s conversion of ocean wave energy into electricity is enhanced and made more efficient. In this way, PWECs are
given as sustainable alternatives to the predominant and unsustainable sources of
electricity such as coal, natural gas, and nuclear power plants. Thus, by enhancing
PWEC dynamics through active control schemes, not only could a greater portion
of the world’s electricity demands be possibly met through a sustainable energy
source such as ocean waves, but with enhanced actively controlled wave energy
converters (WECs) such as PWECs, the reasons to do so become more attractive
and competitive when compared to the status quo.
Motivation of this work can be viewed at three different levels, with each level
becoming more specific and directed towards the focus of this thesis—the modeling
and designing of an active controller for a generic PWEC.
Motivation 1. A global need for electricity generation that produces less anthropogenic pollutants and is based on a sustainable energy resource.
Motivation 2. Promotion of wave energy as a sustainable resource for electricity
2
generation. Specifically, the promotion of PWECs as viable forms
of alternative energy for global electricity consumption.
Motivation 3. To enhance a generic PWEC’s ability to convert ocean wave energy into electricity through the development of a control strategy
and an active controller.
1.1 Horizontal Pendulum Based Wave Energy Converters
PWECs utilize the undulating motion of ocean waves to induce moments about
their center of mass. These moments, in turn, cause the hull of the PWEC to
be tilted and consequently the horizontally mounted pendulum to swing. The
swinging motion of the pendulum is what ultimately drives a generator to produce
electricity from ocean waves. Figure 1.1 shows a generic representation of a PWEC
with its five major components: hull, generator, gearbox, pendulum, and bearings.
Due to their robustness and efficacious attributes, PWECs carry significant promise
as wave energy converters [4]. In fact, two major ventures have developed PWEC
technology: Wello [5] and Neptune Wave Power [6], Figures 1.2 and 1.3 respectively.
3
Bearings
Pendulum
Gearbox
Hull Cross Section
Generator
Figure 1.1: A generic PWEC with its five major components labeled.
Robustness of a PWEC comes from its components being secured within a
protective hull. Consequently, the destructive, harsh, and corrosive nature of the
ocean is better constrained and greater component longevity is achieved than what
would otherwise be possible. Furthermore, all major components of a PWEC can
be assembled onshore, thus when omitting the mooring and power cable connection, PWECs require no offshore assembly during deployment. Also, a PWEC’s
components are dominated by prevalent and common sources. Little or nothing is
owed to exotic types of materials, design, or fabrication. In short, the manufacturing, maintenance, and eventual repair of the PWEC’s systems are minimized,
thereby reducing operational costs whilst extending device longevity and performance.
A PWEC’s effectiveness as a wave energy converter is due to its simplicity
in both design and operation. A PWEC need only be tilted slightly to induce
4
Image by and property of Wello Ltd.
Figure 1.2: Wello’s PenguinTM wave energy converter [5].
pendulum motion and thus produce electricity. Even slight tilting perturbations of
the PWEC can cause its pendulum to swing [7]. This sensitivity allows a PWEC to
be intrinsically productive at generating electricity in a wide range of ocean states
which span both small and large wave heights [4]. Wello’s PenguinTM PWEC, for
example, will produce electricity in both very small and very large waves, with
an estimated peak power output of approximately 500 kilowatts [5]. While it is
true that performance data for WECs are strongly dependent upon how a device
is controlled, how a device is scaled, and the wave energy resource environment in
which the device is subjected to, (see [8]), the outcome of Wello’s research, and
others like it, nonetheless presents good indications of how PWECs are effective
wave energy converters [5, 6].
While the underlying concepts describing both the robustness and efficaciousness of a PWEC are not exceedingly complex, the optimal manner in which to
augment these characteristics through active pendulum control is not immediately
5
Image by and property of Neptune Wave Power LLC.
Figure 1.3: Neptune Wave Power’s Wave Energy Converter [6].
obvious or clear. As indicated, the impetus of investigation and underlying purpose
of this work, therefore, is to actively control the dynamics of a PWEC’s pendulum such that greater wave energy to electricity conversion occurs. The assertion,
consequently, is the existence of an optimal state trajectory for which a PWEC
pendulum’s dynamics should follow and for which a corresponding control strategy can successfully enforce. In this sense, an optimal pendulum state trajectory
is defined as one which produces greater net electrical power output than its uncontrolled pendulum counterpart [9]. An important aspect of this thesis, ergo, is
to investigate these possible optimal pendulum state trajectories and their corresponding control methods. To do this, a generic, representative PWEC has been
R
modeled and simulated in MATLAB
. The generic PWEC’s ocean wave envi-
ronment was developed based on the Oregon coastal water resource [10]. Marine
6
hydrokinetics were developed utilizing linear wave–potential flow theory. Determination of optimal pendulum state trajectories is ultimately an investigation into
maximizing the total energy of the pendulum and, in turn, maximizing net electricity generation. The control methods addressed in this work, leverage techniques
from both optimal and model based control theory.
1.2 Contributions of Thesis
Major contributions from this thesis, involve the numerical simulation of the following elements and are developed into corresponding sections of the document:
a) Development of the generic PWEC dynamics that represents the major components and modes of operation that all PWECs fundamentally possess. The
generic PWEC does not seek to prioritize any one particular trait or aspect
of more exotic and novel PWEC designs.
b) Development of a numerically modeled ocean wave environment typified by
the deep water enviornment off the coast of Oregon.
c) Development of a hydrodynamic modeling scheme that places the generic
PWEC in the modeled Oregon ocean wave environment such that the generic
PWEC behaves in a manner that emulates reality.
d) Development of possible control strategies for the generic PWEC with the
goal that wave energy conversion into electricity is increased.
7
Note, however, that due to the nascent nature of ocean wave energy conversion, the research presented in this thesis is a thread in a tapestry that is presently
still being woven. Thus, the overall contribution of this work, seeks to be a starting point for more detailed analyses, or at minimum a baseline, for which more
specific or exotic PWEC designs and their corresponding controllers can compare
to. Ultimately, however, the ambition of the presented research is to provide control strategies that will enable PWECs to further become a robust and effective
means to convert ocean wave energy into electricity, thereby facilitating and further promoting ocean wave energy as a viable, sustainable, and renewable means
to produce electricity for the world.
8
Chapter 2: Literature Review
Globally, 22 trillion (short-scale) kilowatt hours of electricity are consumed on
an annual bases [11–14]. Unfortunately, a large portion of this electricity, approximately 75 percent, is generated through the combustion or usage of energy
resources that are finite in quantity and whose byproducts are predominately large
sources of anthropogenic pollution; carbon monoxide, carbon dioxide, hydrocarbons, nitrogen oxides, and sulfur oxides.
The United States alone is responsible for nearly 17 percent (3.7 trillion kilowatt
hours) of annual global electricity consumption [13, 14]. And, like the rest of the
world, the majority of its electricity consumption is derived from unsustainable and
nonrenewable energy sources; 42 percent of its electricity is from the combustion
of coal, and another 25 percent is from the combustion of natural gas [15]. Thus, if
one considers only the largest component, carbon dioxide, of all the anthropogenic
polluting byproducts from current and dominating forms of electricity generation
within the United States, then over a course of an entire year U.S. coal plants will
produce 1.6 trillion kilograms of carbon dioxide (1kg of CO2 per kilowatt hour of
electricity generated) and U.S. natural gas plants will produce 460 billion kilograms
of carbon dioxide (0.5kg of CO2 per kilowatt hour of electricity generated) [16,17].
While carbon dioxide itself is not necessarily deadly or harmful, plants require it
for photosynthesis as an example, it is the huge quantity of anthropogenic carbon
9
dioxide that should cause concern. Large quantities of carbon dioxide increases
ocean acidification and promotes the greenhouse effect [18–20]. Thus, while this
work does not address the world’s issues with respect to its electricity consumption,
it does seek to ameliorate the source of its generation. In other words, PWECs
present an alternative electrical energy resource that could reduce anthropogenic
pollution by being used in place of the aforementioned unsustainable and nonrenewable energy paradigms.
2.1 Ocean Wave Energy
The source of sustainable energy for wave energy converters is, of course, ocean
waves. The origin of this sustainability, however, is ultimately due to solar radiation. Large amounts of solar energy are bestowed upon the ocean in the form of
wind waves. As the name suggests, energy in wind waves are produced by winds as
a consequence of Earth’s atmosphere redistributing solar energy across the globe.
Thus, in this sense, the energy within ocean waves is a concentrated form of solar
radiation. According to [8], it is estimated that the energy content within ocean
waves is within the same order of magnitude as the entire world’s electrical consumption. However, it is also noted by [8] that the realistic percentage of ocean
wave energy that can be cultivated has an upper bound of 10 to 25 percent. Thus,
ocean wave energy may not necessarily be the panacea for the world’s energy needs,
but it could eventually be a large contributor.
As can been seen in Figure 2.1, the power within ocean waves is not distributed
10
across the world evenly. Most areas of greater wave power are located on the
downwind side of temperate ocean latitudes thus, due to various convection cells
and the Earth’s rotation, the eastward blowing jet stream is developed thereby
causing larger waves to be found on western facing land masses. As a result, the
greatest potential for ocean wave energy conversion in the United States (excluding
parts of the State of Alaska) exist along the coasts of Washington State, Oregon
State, and the northern parts of California State; these are the areas within the
U.S. with the highest mean wave power estimates.
<5
5 - 10
10 - 15
15 - 20
20 - 30
30 - 40
40 - 60
> 60
Figure 2.1: Global annual mean wave power estimates in kilowatts per meter
of wave crest length [8]. Figure created by [8].
With such a powerful, sustainable, and dependable energy resource as ocean
11
waves, much interest has been garnered to find techniques to replace unsustainable
sources of electricity with wave energy converters, such as the PWEC.
2.2 Wave Energy Converters
Patents of wave energy converting devices have existed since the late 1790s [8,
21]. However, one of the first notable and modern pursuits of ocean wave energy
conversion, which received wide acclaim and notoriety, was the research performed
by Stephen H. Salter of The University of Edinburgh. During the oil shortage
crises of the 1970s, Salter investigated a means of converting ocean wave energy
into electricity. In 1974, Salter published some of his research results in the journal
Nature. In the article, he proposed the usefulness of extracting energy from the
ocean waves by means of his floating cam device; now known as Salter’s Duck [22],
see Figure 2.4. Unfortunately, as the oil shortage crisis waned, funding and research
into ocean wave energy converters, such as Salter’s Duck, waned as well. As a
result, the 1980s saw relatively little WEC research [8].
The 1990s experienced a revival in ocean wave energy research due to several
significant accomplishments advancing the field. Most of the accomplishments
were predominantly due to achievements in air turbine design (for oscillating water
column, see Sub-Section 2.2.6), direct drive linear generators, hydraulics, and the
consideration of alternative uses of ocean wave energy (as opposed to electricity
generation) such as desalination [23–26].
Many mechanisms in addition to PWECs have been or currently are being
12
developed in attempts to convert ocean wave energy into electricity. In an effort
to bring context and scope to the interest generated for wave energy conversion,
listed below are various forms (other than PWECs) of wave energy converters
that have been, or currently are being, investigated. Of note, the list indicates
the diverse nature of WECs, demonstrating the lack of convergence to any one
particular WEC design.
2.2.1 Attenuator
An attenuator is a WEC whose length predominantly lies parallel to the governing
direction of wave progression. The purpose of this WEC is to typically ride atop
the ocean wave. A representative attenuator device is the Pelamis Wave Energy
Converter.
13
Public Domain Image.
Figure 2.2: Example of an attenuator, the Pelamis Wave Energy Converter [27].
14
2.2.2 Heaving Point Absorber
A heaving point absorber is a WEC based on the heaving nature of a floating buoy
whose dimensions are relatively small in comparison to the dominant wavelength
of the incident wave. Ocean Power Technologies’ “PowerBuoy” is an example of
this type of WEC.
15
Image by and property of Ocean Power Technologies. Used in accordence
with Free Art License.
Figure 2.3: Example of a heaving point absorber, Ocean Power Technology’s
PowerBuoy [28].
16
2.2.3 Terminator
The principal axis of a terminator WEC lies parallel to the dominant length of a
wave crest and is intended to intercept the motion of incoming, incident waves in
both heave and surge. Salter’s Duck is an example of this type of WEC [22].
Image by and property of The University of Edinburgh.
Figure 2.4: Example of a terminator wave energy converter, Salters Duck [29].
17
2.2.4 Submerged Pressure Differential
The operation of a submerged pressure differential WEC depends, as it name implies, on the changing pressure differential existing at the WEC’s position beneath
the ocean’s surface which occurs as ocean waves progress above it. A submerged,
semi-heaving buoy is typically used for such a pressure differential. The Archimedes
Wave Swing is an example of a submerged pressure differential wave energy converter.
Image by and property of Archimedes Wave Swing.
Figure 2.5: Example of a submerged pressure differential wave energy converter,
Archimedes Wave Swing [30].
18
2.2.5 Oscillating Wave Surge Converter
An oscillating wave surge converter’s operation is typified as a Terminator type
WEC which swings back and forth due to the surge present in ocean waves. The
Aquamarine Power Oyster is an example of a WEC utilizing this mode of operation
[31].
Image by and property of Aquamarine Power.
Figure 2.6: Example of an oscillating wave surge converter, Aquamarine Power
Oyster [32].
19
2.2.6 Oscillating Water Column
An open to atmosphere cylindrical airway with a turbine characterizes the oscillating water column WEC. As an incident wave progresses beneath the vertically
oriented cylinder, an oscillating flow of air through the turbine occurs.
Image by and property of Wavegen.
Figure 2.7: Example of oscillating water column, Islay Wavegen LIMPET. [33]
20
2.3 Wave Energy Research at Oregon State University
Oregon State University has a rich history that is analogous with the modern
ocean wave energy evolution described in the beginning paragraphs of Section 2.2.
Circa 1975, Dr. Larry Slotta, from Oregon State University’s College of Engineering, submitted a proposal for funding from the National Science Foundation with
the intent to investigate “The Potential of Oceanic Water Waves for Recoverable
Power” [34]. In 1981, both Slotta and Hudspeth published an article addressing the
potential of wave power extraction from the heaving of cylindrical buoys [35]. In
2007, Oregon State University deployed a wave energy converter named SeaBeav1.
Using a linear permanent magnet generator, SeaBeav1’s purpose was to generate
electricity by the undulating motion of a cylindrical buoy [36]. In 2008, Agamloh
et al from Oregon State University, published an article describing the design and
testing of a rotary direct-drive system for the extraction of ocean wave energy [37].
That same year, a collaborative partnership between Oregon State University and
Columbia Power Technologies was underway resulting in the development of the
“L-10” device. The “L-10” was the first wave energy converter to produce electricity from Oregon State waves [38].
In 2008, the Northwest National Marine Renewable Energy Center (NNMREC)
was established as a collaboration between Oregon State University and The University of Washington. Funded by the United States Department of Energy, NNMREC’s mission addresses the major facets of ocean wave energy development, the
scope of which includes the following: Technical, investigatory, and environmental
21
attributes; social, cultural, and local community aspects; and collaborative and
concurrent developments of Oregon State University, The University of Washington, and commercial ventures with respect to marine renewable energy [39].
2.4 Research and Investigations Regarding PWECs
When compared to some of the WECs listed in Sub-Sections 2.2.1 through 2.2.6,
published research and public information regarding the modeling, performance,
and control strategies for PWECs is lacking. Notwithstanding, the following is a
review of some of the dominant arenas of research regarding PWECs. One should
understand, however, that most direct information relating to a PWECs performance is ultimately proprietary and thus held within the respective company’s
domain. As such, the following can only be a cursory look at what has been, or
currently is being, investigated.
The earliest publication regarding PWECs, known to this author, occurred in
the form of a patent issued in 1966 on behalf of the Thiokol Chemical Corporation
[40]. The design intent of the Thiokol buoy type PWEC, was to provide an “onboard” means to power navigational buoys, nautical wreck markers, and other
signaling type buoys which require electrical energy for long periods of time. An
illustrative concept and mode of operation for the Thiokol device is given in Figure
2.8.
22
Figure 2.8: First Patented Horizontally Pendulum Based Wave Energy Converter Thiokol Wave Power Generator. The following descriptions come from
the patent itself [40]. 49: Eye bolt 50: Anchoring cable 60: “Horizontally disposed pendulum” 61: Terminating “bob” or weight 62:
“Vertical rotatable armature shaft” 63: Generator housing. 64: “The
shaft coinciding with the axis of a sealed buoy” 66: Thrust bearing 68:
Generator 70: Batteries
Circa 2006, Neptune Wave Power LLC was issued one of the first patents for a
PWEC with the explicit purpose of developing large scale converters with the intent
of supplying electricity to utility grids. Neptune Wave Power’s PWEC implements
control by a sliding mass capable of translating radially along the pendulum’s
length, see Figure 2.9. In addition to being able to decelerate, and thus slow
down the pendulum, Neptune Wave Power’s sliding pendulum mass enables the
intrinsic controllability of the pendulum’s moment of inertia at any time during
normal operation. In this way, Neptune Wave Power’s PWEC has the ability to
23
actively alter its pendulum dynamics in accordance with the varying wave states
of the ocean. With the capability of adjusting to various sea states, Neptune Wave
Power claims their device as having greater potential to maximize ocean energy
harvesting. Advertised parameters for Neptune Wave Power’s PWEC include a
major diameter of approximately 15 meters, a peak power output of 225 plus
kilowatts, an operational wave environment ranging from 1 to 10 plus meter wave
heights, and a service life of approximately 30 years [6].
24
Figure 2.9: Figure from Neptune Wave Power’s patent [6]. Figure shows method
of control for Neptune Wave Power’s PWEC. Control is implemented
through braking and by a mass that can translate radially along the
pendulum’s length such that the pendulum’s moment of inertia can be
altered during operation.
The following descriptions come from the patent itself:
72: central compartment
91: processing module
92: communication module
93: measurement module
94: load variation mechanism
95: pendulum break
96: braking circuit
97: length variation mechanism
25
In 2009, James G. Bretl of The University of Michigan submitted his dissertation which sought to promote PWECs (similar to Thiokol endeavors of the 1960s)
as a means to satisfy the power requirements of autonomous data buoys, especially for those buoys needing power for station-keeping [7]. In his dissertation,
Bretl gives good analysis of an uncontrolled PWEC’s dynamics in monochromatic
waves (regular waves) and validates the results through a series of laboratory experiments. Bretl was able to verify that his PWEC data buoy was capable of
converting up to approximately 30 percent of the power present in a regular wave,
but in order to do so, the wave’s frequency needed to be relatively small when compared to the size of his PWEC. Conversely, Bretl noted that if the wave’s frequency
was relatively long when compared to his PWEC, then wave power conversion was
significantly lower. Bretl’s results ultimately showed great potential for PWECs as
a power source for autonomous buoys and utility grids. Moreover, Bretl indicated
a need for proper PWEC scaling in order to achieve a higher level of wave power
conversion that would otherwise not be possible.
One of the more notable contributions of Bretl’s research to the work presented
in this thesis, is the proof of an intuitive requirement for max power generation of
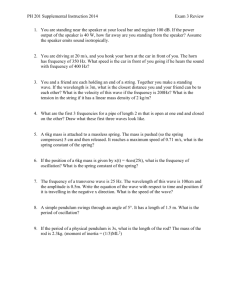
a PWEC. In the following bifurcation plot provided by Bretl, one sees that power
output is maximized where constant direction of pendulum rotation occurs. This
assertion, will be shown useful for control strategy development due to it being a
pendulum state worthy of a controller to pursue, see Figure 2.10. Moreover, Bretl’s
bifurcation plot shows that while the dynamics of the pendulum are deterministic,
the behavior is difficult to predict. Lack of predictability is due to the regions of
26
chaos which are denoted by the scattered regions of blue dots in Bretl’s bifurcation
plot.
27
Radial Freq (rads/s) and Power (W)
Bifucation of Rotational Velocity ==> Damping = 0.15; Steepness = 0.08; Phase = -75˚; Initial Angle = 2.09 rads
4
Rotation Rate
Power (watts)
2
0
-2
-4
1
1.5
2
2.5
3
3.5
Wave Freq (1/s)
4
4.5
5
5.5
6
Radial Freq (rads/s) and Power (W)
Bifucation of Rotational Velocity ==> Damping = 0.15; Steepness = 0.08; Phase = -75˚; Initial Angle = 5.24 rads
4
2
0
-2
-4
1
1.5
2
2.5
3
3.5
Wave Freq (1/s)
4
4.5
5
5.5
6
Figure 2.10: Bretl’s two bifurcation diagrams showing the relationship between
pendulum rotation and wave frequency [7]. Of special interest, is
how max power occurs when pendulum rotates in constant direction,
the encircled regions. The dotted red line indicates power (watts).
The blue curved lines/dots can represent equilibria (single blue curve
per wave frequency), limit cycles (multiple blue curves per wave frequency), or chaos (areas of random blue dot smattering).
28
Another venture developing a PWEC is the Finnish company Wello Ltd. Wello
is designing and evaluating the performance of a PWEC called PenguinTM for the
purpose of supplying utility grid scale power. PenguinTM has a length of approximately 30 meters and a hull shape that appears to be designed for accruing
parametric rolling effects, see Figure 1.2 for a concept illustration of the Wello
PenguinTM . Parametric rolling is a somewhat unpredictable phenomenon caused
by resonance. When a nearly regular wave moving at a frequency that is approximately twice the natural roll frequency of an elongated vessel, parametric rolling
effects occur. The magnitude of the parametric rolling increases as the magnitude
of the wave increases. In other words, instead of trying to avoid parametric rolling
as one would for normal nautical vessels, it appears Wello’s PenguinTM is attempting to harness and use parametric rolling to enhance the conversion of ocean wave
energy into electricity. Nevertheless, Wello’s PenguinTM has a power takeoff akin
to any other PWEC: a pendulum rotating within a hull due to the undulating
motions of ocean waves. Wello has tested a prototype in Orkney Scotland at the
European Marine Energy Center. Wello advertises their design as having a peak
power output range of 0.5 to 1 Megawatts [5].
As can be read above, interest, investigation, and research into PWECs has
existed for over half a century. Unfortunately, however, little published research
exists. Furthermore, the information that does exist appears to be limited to
regular wave environments with little specific mention of control strategies. While
some PWECs have a means of control, Neptune Wave Power’s PWEC is a notable
example, information regarding the control strategies, and manner in which to
29
implement control, is most likely contained within the respective companies as
proprietary information.
30
Chapter 3: Modeling a Generic PWEC
As indicated in Chapter 1, the focus of this research is to investigate how active
control strategies can improve the performance of a generic PWEC, with neither
bias nor favor towards any one particular PWEC design. In other words, special
hull shapes, pendulum inertia altering translating masses, or other exotic design
features of a PWEC shall be omitted in the modeling. In this way, the exercise
of applying active control strategies can be isolated and evaluated on their own
merits rather than on any enhancing mechanical or hydrodynamical design feature(s). As such, applying control to the generic PWEC’s dynamics is through
generator feedback and the generic PWEC itself is to be modeled by five characteristic components that dominate nearly all aspects of any PWEC design, see
Figure 1.1:
1. Shallow cylindrical hull
2. Pendulum
3. Bearings
4. Gearbox
5. Generator
31
3.1 Cursory Investigation of PWEC Dynamics
In an effort to orient the direction of numerical modeling, to glimpse at some of
the PWECs dominant dynamical features, and to ascertain which aspects of the
PWEC’s dynamics can and should be constrained for ease of analysis, a preliminary
R
R
R
investigation of a generic PWEC was performed in ANSYS
AQWA
. AQWA
R
is ANSYS
’s analysis system associated with hydrodynamic assessments such as
floating body analysis, pressure analysis, and diffraction analysis [41].
R
Due to a cursory AQWA
analysis, followed by the leveraging of information
found in Neptune Wave Power’s patent (see [4]), it was determined that if the
buoyancy for a half submerged generic PWEC were at least 5 to 10 time the
weight of the generic PWEC as a whole, that the pitching and rolling angles
of the generic PWEC are predominantly caused by ocean waves rather than the
R
weight of the pendulum itself. Likewise, it was determined by further AQWA
analysis results, that for a well constrained/moored generic PWEC that only three
significant dominating modes of motion for the generic PWEC occur: heave, roll,
and pitch. Furthermore, by only considering one dimensional wave progression,
the dominant modes of motion for the generic PWEC become only heave and
pitch. In this way, the system dynamics of the generic PWEC to be modeled
has three degrees of freedom: up and down (heaving), the bow of the generic
PWEC tilting back and forth (pitching), and the rotation of the generic PWEC’s
pendulum. Figure 3.1 illustrates the generic PWEC’s degrees of freedom, forces,
and moments.
32
Y2 Axis
Top View
A
X1 Axis
Rp
Φ
Md & Mgen
B
X2 Axis
Y1 Axis
Z1 Axis & Z2 Axis
θ
X1 Axis
FEH , FRH , & FBH
MEP , MRP , & MBP
Cp
B
A
Wave Profile
mp g
mh g
Z0 Axis
Side View
X0 Axis
Figure 3.1: Free body diagram of generic PWEC.
33
3.2 Equations of Motion
Utilizing Lagrangian mechanics, the equations of motion for the generic PWEC in
heave and pitch, in addition to the equations of motion for the generic PWEC’s
pendulum, were developed in the following procedure:
1. Omitting all non-conservative forces, determine the generic PWEC’s Lagrangian; see (3.13).
2. Substitute generic PWEC’s Lagrangian into the respective Euler-Lagrange
equation for each degree of freedom; see (3.14), (3.26), and (3.28).
3. Derive preliminary equations of motion (equations of motions absent of nonconservative forces, e.g.: viscous damping, hydrodynamic forcing, and user
applied forcing) by carrying out the differentiations of the respective EulerLagrange equation for each generalized coordinate system; each degree of
freedom.
4. Derive final equations of motion according to generalized coordinate system
by augmenting the preliminary equations of motion with the needed nonconservative forces; see (3.22), (3.27), and (3.29).
By utilizing the above procedure, three equations of motion are developed for
the PWEC: one for each degree of freedom. As an example, the derivation of
the multi-body system Lagrangian and the Pendulum’s equation of motion is now
given:
34
3.2.1 Generic PWEC’s Lagrangian
The generic PWEC Lagrangian, L, is given by
L = Ttotal − Vtotal ,
(3.1)
where the total kinetic energy, Ttotal , of the generic PWEC is given by
Ttotal = Th + Tp
(3.2)
and the total potential energy, Vtotal , of the generic PWEC is given by
Vtotal = Vh + Vp .
(3.3)
The kinetic energy of generic PWEC’s hull, Th , is
Th =
1
1
2
mh Ż0h
+ (Iy0 h ) θ̇2 ,
2
2
(3.4)
while the kinetic energy of the generic PWEC’s pendulum, Tp , is given by
TP =
1
2
+ Ẏ1p2 ) ,
mp (Ẋ1p
2
(3.5)
where
X1p = Rp cos(φ),
Y1p = Rp sin(φ)
(3.6)
35
and so
Ẋ1p = −Rp φ̇ sin(φ),
Ẏ1p = Rp φ̇ cos(φ) .
(3.7)
Therefore, the total kinetic energy of a generic PWEC is
2 1 2
1 Tp = mp − Rp φ̇ sin(φ) + mp Rp φ̇ cos(φ) .
2
2
(3.8)
The potential energy of a generic PWEC’s hull, Vh , is
Vh = mh g Z0h ,
(3.9)
and the potential energy of the generic PWEC’s pendulum, Vp , is
Vp = mp g Z0p ,
(3.10)
Z0p = Z0h − Rp cos(φ) sin(θ)
(3.11)
where
The Lagrangian for the multi-body system (the generic PWEC), L, is thus
1
1
1
1
2
L = mh Ż0h
+ (Iy0 h )θ̇2 + mp Rp2 φ̇2 sin2 (φ) + mp Rp2 φ̇2 cos2 (φ)
2
2
2
2
−mh g Z0h − mp g Z0h + mp g Rp cos(φ) sin(θ) .
(3.12)
(3.13)
36
3.2.2 Equation of Motion for Generic PWEC’s Pendulum
The Euler-Lagrange equation with respect to the generic PWEC pendulum’s motion, φ, is given by
d ∂L
dt ∂ φ̇
!
∂L
=
∂φ
!
.
(3.14)
Substituting in the Lagrangian, (3.13), into (3.14) and carrying out the differentiations one obtains:
∂L
∂ φ̇
= mp Rp2 φ̇ sin2 (φ) + mp Rp2 φ̇ cos2 (φ) ,
d ∂L
dt ∂ φ̇
!
= mp Rp2 φ̈ sin2 (φ) + mp Rp2 φ̈ cos2 (φ) ,
∂L
∂φ
φ̈
mp Rp2
2
(3.15)
(3.16)
!
sin (φ) +
= −mp g Rp sin(φ) sin(θ) ,
mp Rp2
2
cos (φ) = −mp g Rp sin(φ) sin(θ) ,
φ̈ mp Rp2 sin2 (φ) + cos2 (φ) = −mp g Rp sin(φ) sin(θ) ,
(3.17)
(3.18)
(3.19)
since sin2 (φ) + cos2 (φ) = 1 , then
φ̈ mp Rp2 = −mp g Rp sin(φ) sin(θ) .
(3.20)
37
After adding the non-conservative forces, Md and Mgen , to (3.20), one obtains the
final equation of motion for the generic PWEC’s pendulum,
φ̈
mp Rp2
= −mp g Rp sin(φ) sin(θ) + Md + Mgen ,
(3.21)
or
φ̈ =
−mp g Rp sin(φ) sin(θ) + Md + Mgen
.
(3.22)
mp Rp2
The Md term of (3.22) is the pendulum’s damping moment caused by its bearings and can be expanded out to
Md = −Cb φ̇ ,
(3.23)
N ·m·s
[42–44]. The Mgen term
rad
of (3.22) is the applied moment due to the generic PWEC’s generator, and is,
where typical values for Cb range around 0.02
therefore, the mode of control for which the controller can manipulate the PWEC’s
pendulum. In this way, Mgen can be defined by two modes:
Mgen (t) = Cgen φ̇ ,
(3.24)
Mgen (t) = −Cgen φ̇
(3.25)
defined as “motor mode”, and
38
being defined as “generator mode.”
The generic PWEC’s generator is modeled after a linear damper with the possibility of a more sophisticated generator being left as an “application specific
task.” For this work, however, it is the sign of the Cgen term that designates the
direction of energy conversion. Thus, as indicated before, if positive, the generator
is in “motor-mode” and energy is being added to the system from the PWEC’s
controller. Conversely, if negative, then the generator is in “generator-mode” and
electricity is being outputted. The ability to not only alter the sign (mode of operation), but to also vary the value of Cgen , is the basis for which control will be
developed in Chapter 6.
In a similar manner, the equations of motion for both heaving and pitching of
the generic PWEC were developed.
3.2.3 Equation of Motion for Generic PWEC in Heave
For motion in heave, the Euler-Lagrange equation is given by
d
∂L
dt ∂ Ż0h
!
=
∂L
!
(3.26)
∂Z0h
resulting in the following equation of motion for heave,
Z̈0h =
−mh g − mp g + FBH + FEH + FRH
mh
.
(3.27)
39
3.2.4 Equation of Motion for Generic PWEC in Pitch
For motion in pitch, the Euler-Lagrange equation is given by
d ∂L
dt ∂ θ̇
!
=
∂L
!
(3.28)
∂θ
and whose corresponding equation of motion therefore given as
θ̈ =
mp g Rp cos(φ) cos(θ) + MBP + MEP + MRP
.
(3.29)
Iy0 h
3.2.5 Hydrostatic Terms
The hydrostatic force, FBH , and hydrostatic moment, MBP , are describe in (3.30)
and (3.32) respectively.
Z
FBH =
pS dAw = V– dw ρ g
(3.30)
Aw
where
pS = −ρ g z0 ,
(3.31)
MBP = FBH × CP ,
(3.32)
and therefore
40
with Cp being the position vector for the generic PWEC’s center of pressure.
3.2.6 Hydrodynamic Terms
The hydrodynamic radiation force, FRH , and the hydrodynamic radiation moment,
R
R
MRP , are determined via ANSYS
AQWA
analysis and correspond to added
inertias and damping of the generic PWEC’s interaction with the ocean waves.
These values are functions of hull geometry and hull oscillation periods and are
described as follows:
FRH = −maH Z̈0h − CdH Ż0h
(3.33)
MRP = −IaP Z̈0h − CdP θ̇
(3.34)
and
where maH and IaP are the added inertias associated with heave and pitch respectively, and CdH and CdP correspond to the damping of the PWEC in heave and
pitch respectively.
The hydrodynamic excitation force, FEH , and the hydrodynamic excitation
moment, MEP , are subject to the methods described in Chapter 5.
41
3.3 Characterization of the Generic PWEC’s Dynamics
Figures 3.2 and 3.3 are intended to show some of the characteristic dynamics that
can be expected from a pendulum moving within the hull of a generic PWEC. Figure 3.2 shows the response of a pendulum when its rotation plane is inclined. The
notable aspect of Figure 3.2 is the increase in the pendulum’s natural frequency as
the pendulum’s plane of rotation (the pitch angle of the PWEC) increases. Figure
3.3 is an example of a bifurcation plot showing the relationship between pendulum
angular position and an oscillating forcing moment acting on the pendulum rotation. The bifurcation plot indicates that although the dynamics of the pendulum
are deterministic, they are not necessarily predictable. The pendulum can exhibit
stationary equilibria, represented by a singled curved line in Figure 3.3 per given
amplitude of a control moment; equilibrium limit cycles, represented by multiple
curved lines in Figure 3.3 per given amplitude of a control moment; or chaos,
scattered areas of data points in Figure 3.3.
42
Natural Frequency of Pendulum According to Hull Pitch Angle
0.5
0.45
0.4
Frequency (Hz)
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
0
0.01
0.02
0.03
0.04
0.05
Hull Pitch Angle (radians)
0.06
0.07
0.08
0.09
Figure 3.2: A plot showing the relationship between natural frequency of pendulum as a function of hull pitch. Natural frequency increases as pitch
angle increases. Parameters used for plot: pendulum mass, mp , 10 kg;
pendulum length, Rp , 0.12 m.
43
Figure 3.3: Bifurcation plot of a pendulum angular position as a function of an applied oscillatory control moment. Parameters used for plot: pendulum
mass, mp , 1 kg; pendulum length, Rp , 9.81 m; frequency of applied
oscillatory control is 2/3 Hz.
44
Chapter 4: Modeling An Ocean Wave Environment
Simulation of the generic PWEC occurs in a modeled ocean wave energy environment reminiscent of waves found off the coast of Oregon state. The basis for
selecting such an environment is threefold. Firstly, the wave energy resource found
off the coast of Oregon presents one of the highest potentials for wave energy conversion. With a total annual amount of 179 TWh, the amount of wave energy
offshore and along the outer shelf of Oregon has presented itself as one of the
largest wave energy resource environments in the continental United States [45].
Secondly, an already well developed infrastructure (roads, harbors, marine vessels,
utility grids, and communities) exist along the Oregon coast that could readily accommodate ocean wave energy conversion and extraction. Thirdly, Oregon State
University hosts NNMREC, a center devoted to the development of marine renewable energy technologies [39]. In short, the Oregon ocean wave environment
is an ideal environment and one of the most practical environments in the United
States in which to simulate the behavior of a generic PWEC. To model Oregon’s
ocean waves, linear-potential flow wave theory is used. Use of this theory assumes
a mean uniform fluid depth, with inviscid, incompressible, and irrotational fluid
flow [46].
The needed wave parameters, assuming a water depth of 100 meters, to simulate
the Oregon wave environment using linear wave theory are: significant wave height,
45
H0 ; significant wave energy period, T−10 ; and (for irregular waves) a wave spectra,
S(f ), that relates wave frequency to wave amplitudes. The relationship between
wave spectra and other wave parameters—such as spectral moment, significant
wave height, wave energy period, and power in wave per crest length—are shown
in equations (4.1) through (4.4),
Z
mn =
Hm0 = Hs = 4
T−10 =
Pw =
f n S(f ) df ,
√
m0 ,
(4.1)
(4.2)
m−1
,
m0
(4.3)
ρg 2 2
H Te .
64π s
(4.4)
Generally, Oregon waves possess more energy in the winter months than in
the summer months. During the winter months, the mean significant wave height
is 3.1 meters with an wave period of 10.5 seconds. During the summer months,
the mean significant wave height is 1.6 meters with a mean energy period of 7.5
seconds. The resulting annual average values for significant wave height and wave
period is 2.4 meters and 9 seconds respectively [10]. Thus, the simulated Oregon
ocean wave environment will use values near the annual averages: Significant wave
height of 3 meters and a significant wave period of 10 seconds.
Simulations of the ocean wave environment for the generic PWEC were done
in two steps. The first step established a gross approximation of the Oregon
46
wave environment such that a “proof-of-concept” or foundation were established
upon which a more realistic wave environment could be modeled. The first step
centered around the development of a monochromatic, regular wave environment.
The regular wave environment was modeled with a wave height, H, of 3 meters and
a wave period, T , of 10 seconds. The second step, is based on an irregular wave
environment with a significant wave height, Hs , of 3 meters and with a significant
wave period, Ts , of 10 seconds.
Ultimately, two sets of equations are developed for simulating ocean waves
akin to what’s found off the shores of Oregon. One set is for regular ocean wave
modeling, equations (4.5) through (4.7). The other set is for irregular ocean wave
modeling, equations (4.9) through (4.13). Each set contains three equations that
define a wave’s profile, a wave’s velocity potential, and the pressure gradient associated with aforementioned wave profile.
4.1 Regular Ocean Waves
A regular ocean wave is monochromatic; see Figure 4.1. In other words, the wave is
nothing more than a sinusoid representing the wave profile; this wave profile (water
surface displacement) is defined by (4.5). Accordingly, modeling the regular ocean
wave (assuming a water depth of 100 meters) requires knowledge of only a single
wave height and a single wave frequency. Whilst not a realistic Oregon State ocean
wave environment, by using a wave height, H, of 3 meters and a wave period, T , of
10 seconds, the modeled regular ocean wave does provide a preliminary and basic
47
level of feedback regarding the generic PWEC’s performance in an ocean wave
energy resource. Moreover, using the regular wave environment approximation
provides an initial means to develop, debug, and vet the fundamental aspects of
the software code developed to simulate the generic PWEC in ocean waves.
To simulate the regular ocean waves, the wave profile is given by
η=
H
cos(kx − σt) ,
2
(4.5)
with the velocity potential being described by
H g cosh k(h + z0 )
Φ=−
sin(kx − σt) ,
2 σ
cosh(kh)
(4.6)
and whose pressure field is given as
cosh
k(h
+
z
)
0
H
cos(kx − σt) .
p = −ρ g z0 + ρ g
2
cosh(kh)
(4.7)
48
H
T
Figure 4.1: A regular ocean wave is monochromatic. H is the wave height and T
is the wave period.
4.2 Irregular Ocean Waves
Developing irregular ocean waves involves the spectral parameters found in equations (4.1) – (4.4). Ultimately, however, irregular waves are the superposition of
several regular ocean waves. Figure 4.2 gives a good visual representation of how
an irregular wave profile is derived from a wave spectrum.
The Modified Bretschneider-Mitsuyasu wave spectrum was used to simulate
Oregon’s irregular ocean wave environment. Equation (4.8) gives the Modified
Bretschneider-Mitsuyasu wave spectrum [47, 48]. To derive the needed wave spectrum (4.8), a significant wave height, Hs , and a significant wave period, Ts , are
needed. As such, a significant wave height of 3 meters with a significant wave
49
Time Domain
t
Wave Spectrum
j=1
j=2
j=3
j=4
j=5
Summation of
Random Wave
Profiles
j=6
j=7
j=8
j=N
Frequency
Domain
Regular wave components with
Random Phase Angles
Figure 4.2: An irregular ocean wave is composed from the superposition of several
regular waves derived from a wave spectrum [47].
period of 10 seconds is used to simulate a fully developed Oregon State wave environment.
S(f ) = 0.205
Hs2
Ts−4
f
−5
e
−0.75 (Ts f )−4
m2 · s
(4.8)
50
The resulting equations needed to simulate the irregular ocean wave environment are thus derived from the the wave spectrum and are analogous to their
regular wave counterparts found in equations (4.5) through (4.7). In this sense,
the differences between the regular and irregular wave equations, is the superposition of regular wave forms that have randomly generated phases, δi ; see equations
(4.9) through (4.13).
To simulate the irregular ocean waves, the wave profile is given by
ηirr
N
X
Hj
cos(kj x0 − 2 πfj t − δj ) ,
=
2
j=1
(4.9)
where the wave profile is nothing more than the summation of various regular wave
profiles, i.e.
ηirr = η1 + η2 + η3 . . . + ηN
(4.10)
with the velocity potential being described by
Φirr
N
X
Hj g cosh kj (h + z0 )
=
−
sin(kj x0 − 2 π fj t − δj )
2 2 π fj
cosh(kj h)
j=1
(4.11)
,
with the resulting velocity potential being the summation of the various regular
velocity potentials, i.e.
Φirr = Φ1 + Φ2 + Φ3 . . . + ΦN ,
(4.12)
51
and whose pressure field is given as
pirr =
N
X
j=1
−ρ g z0 + ρ g
g
2 π fj
cosh kj (h + z0 )
cosh(kj h)
cos(kj x0 − 2 π fj t − δj ) (4.13)
,
where, as before, the resulting pressure field is the summation of various pressure
fields from regular wave profiles, i.e.
pirr = p1 + p2 + p3 . . . + pN .
(4.14)
Note, the dispersion relation
σj2 = (2 π fj )2 = g kj tanh(kj h) ,
(4.15)
which enables the relation between wave angular frequency, σj , and wavenumber,
kj .
52
Chapter 5: Modeling Marine Hydrodynamics
Several methods exist for the determination of FEH , the excitation force, and in
turn the excitation moment, MEP . A brief summary of some methods is given
below and whose approximate regions of applicability are illustrated in Figure 5.1
and are further explained in Table 5.1.
a) Potential Flow Theory: Forces and moments acting on the floating body
are derived by integrating the resulting velocity potential’s pressure field
(found using a form of the unsteady Bernoulli equation) over the wetted
surface area of the body. This is the dominant method of choice for WEC
research [8, 49–51].
When a floating body is relatively small in comparison to the wavelength of
its ocean wave environment, diffraction and reflection effects can be small
enough to be omitted. When this occurs, Potential Flow Theory condenses
into the Froude-Krylov Theory which is then used to determine the excitation
forces and moments.
When a floating body is relatively large in comparison to the wavelength of
its ocean wave environment both the reflected and diffracted waves should
be accounted for when deriving the hydrodynamic forcing. In this case,
Potential Flow Theory expands into Diffraction Theory for the determination
of the excitation forces and moments.
53
b) Morison Equation Method: Typically used for long slender bodies whose
characteristic dimension to wavelength ratio is less than 0.15 and when the
wave height to characteristic dimension ratio is greater than 1. Such a situation often denotes flow separation and the forces acting on the body are
thus typically dominated by drag [52].
c) Computational Fluid Dynamics (CFD) and Finite Element Methods (FEM): Based on the numerical processes of solving the Navier-Stokes
equations from either a finite volume perspective (Eulerian reference frame)
or finite element perspective (Lagrangian reference frame). This method is
typically reserved for high fidelity modeling and detailed design.
d) Mixture of Methods and Theories: Mixing of the above techniques to
determine the excitation forces and moments can be useful if the floating
body exhibits characteristics or requirements that are indicative, or in need
of all or some of the aforementioned methods [53].
Flow separation becomes important
54
KC =
�H
λ
Wave breaking; limiting case
Region IV
Region I
Wave
nonlinearity
becomes
important
1
Region II
Region III
kD =
1
2�D
λ
Diffraction becomes important
Figure 5.1: Regions of applicability for excitation force determination [1–3, 52].
Adapted from [54] and [1]. Note, D is the characteristic dimension of
the body and in the case of a shallow floating cylinder it is its diameter.
55
Table 5.1: Valid Method Regions for Excitation Force Determination [1–3]
The Region
Applicable Methods
Region I
Both Froude-Krylov and Diffraction Theories augmented by
slim body Morison Equation Method, slim body Morison
Equation Method, CFD, or FEM.
Region II
Both Froude-Krylov and Diffraction Theories, CFD, or
FEM.
Region III
Diffraction Theory, Morison Equation Method for slender
bodies (should be augmented by Diffraction Theory), CFD,
or FEM.
Region IV
Diffraction Theory augmented by Morison Equation
Method, CFD, or FEM. Important to consider non-linear
effects in this region.
5.1 PWEC’s Marine Hydrodynamics
Due to its accommodating and straightforward nature, use of the Froude-Krylov
Theory was implemented to determine the generic PWEC’s hydrodynamic forcing,
FEH and MEP . Using Froude-Krylov Theory assumes that the pressure field shown
in Figure 5.2 is unaltered by the presence of the PWEC and that flow separation
is negligible.
Using the Froude-Krylov approximation, the pressure associated with the incident wave need only be integrated over the wetted surface area of the generic
PWEC to determine FEH and MEP , and one can disregard the pressure fields
created due to both diffracted and radiated waves caused by the generic PWEC’s
56
C
Z0
X0
-0.5
-0.4
-0.3
0
-0.1
0.1
0.2
0.4
0.3
0.5
0.3
0.4
0.2
0.5
0
0.1
-0.1
-0.6
Figure 5.2: Pressure field of a progressive wave profile. Isolines of
progressive wave of
h
= 0.20 [46].
λ
0
0.6
-0.2
-0.7
-0.3
0.7
-0.4
-0.8
-0.2
0.8
-0.5
0.9
pD
for
γ H
2
presence in the wave field. Equations (5.1) through (5.3) describe the needed
hydrodynamic force and moment utilizing Froude-Krylov theory.
The hydrodynamic force, FEH , is given by
Z
FEH =
pD dAW ,
Aw
(5.1)
57
where
cosh
k(h
+
z
)
0
H
pD = ρ g
cos(kx − σt)
2
cosh(kh)
(5.2)
is the dynamic pressure. Therefore, the hydrodynamic moment, MEP is given by
MEP = FEH × Cp .
(5.3)
In order to integrate the dynamic pressure, pD , over the wetted surface area
of the generic PWEC and evaluate the hydrodynamic force, FEH , a paneled apR
proximation of the generic PWEC’s hull was modeled in MATLAB
, see Figure
5.3.
Figure 5.3: Coarse representation of the generic PWEC hull’s pressure panels as
R
modeled in MATLAB
In this way, software code can evaluate the hydrodynamic pressure acting upon
58
each panel according to the panel’s orientation and position within the simulated
ocean wave. With the hydrodynamic pressure known for each panel, the hydrodynamic excitation force vector for each panel can then be found. The overall
hydrodynamic force, FEH , is, therefore, the summation of the individual panel
force vectors, see (5.4).
The complete hydrodynamic forcing vector, F~E , is thus given by
F~E u
Np
X
i=1
F~i =
Np
X
pDi Ap ~nin
(5.4)
i=1
where
D
E
F~E = FEx0 , FEy0 , FEz0 .
(5.5)
Therefore (because F~E contains all components of hydrodynamics forcing—surge,
sway, and heave) the hydrodynamic forcing in heave is
FEH = FEz0 .
(5.6)
Note, F~i is the force vector for panel i, Np is the number of panels, pDi is the
dynamic pressure acting on panel i, Ap is the area of panel i, and ~nin inward
normal vector of panel i.
59
Chapter 6: Modeling Control for Generic PWEC
As described in Section 3.2, control of the generic PWEC pendulum is accomplished by altering the sign and varying the value of the damping coefficient associated with the generator; see (3.24) and (3.25). While the means of control for
the generic PWEC’s pendulum are straightforward, the strategy and manner in
which to do so—for the purpose of increasing net power output—are not immediately obvious. The following illustrates the direction taken for control strategy
development and its corresponding controller design.
6.1 Control Strategy
Bretl’s work shows that max power occurs when the pendulum of a PWEC consistently rotates in one direction; see [7] and Figure 2.10. As such, a notable constraint is placed upon the development of the generic PWEC’s control strategy:
the control strategy should consider enforcing unidirectional pendulum rotation
whilst maintaining net electric power output. The controller has no significant access to energy for the increase of net power generation other than the ocean waves
themselves, thus it behooves the controller to follow a strategy that manipulates
the pendulum’s movements such that the ocean waves themselves cause the needed
unidirectional pendulum rotation. The desired harmonious relationship of waves
60
inducing pendulum rotation is illustrated in Figure 6.1.
Figure 6.1 shows a generic PWEC at four different stages in time. The green
dot in Figure 6.1 represents the bow, or leading edge of the PWEC, and is intended
to indicate that the PWEC maintains a single heading directed into the waves. The
blue and red rectangles represent the PWEC’s pendulum at various locations in
time with respect to the PWEC’s yellow hull. A blue pendulum, found at stages 1
and 3, indicates a maximum potential energy state for the pendulum with respect
to its hull orientation, while a red pendulum, found at stages 2 and 4, indicates a
minimum potential energy state for the pendulum with respect its hull orientation.
The maximum and minimum potential energy states for the pendulum correspond
to the crests and troughs of the waves passing underneath the PWEC. If the
sequence of positions for the pendulum, as represented in Figure 6.1, are followed,
then not only will the pendulum be inclined to consistently rotate in one direction,
but will, in turn, also be maximizing the availability of potential energy for kinetic
energy to electricity conversion.
1st harmonic of rotation: Pendulum rotates 360˚ in T seconds
Progressive Wave Direction
1
g
4
Still Water Level
3
2
Wave Period
T
Figure 6.1: Ideal positional states for pendulum positioning relative to a wave crest
and trough.
61
In addition to illustrating how a wave can switch a PWEC’s pendulum from a
minimum potential energy state into a maximum potential energy state—thereby
facilitating unidirectional pendulum rotation—Figure 6.1 also represents the ideal
pendulum angular positions as they relate to wave crests and wave troughs. The
strategy, therefore, is to control the angular position of the generic PWEC’s pendulum such that it follows those ideal locations. In order to implement this control
strategy, a controller designed to track the ideal angular positions for the generic
PWEC’s pendulum is developed in the succeeding section.
6.2 Controller Design
A model predictive controller, augmented by an integral error controller, utilizing
Linear Quadratic Regulator (LQR) control theory to generate the state feedback
and thus the optimal generator control moment, Mgen , is developed. As will be
explained below, this type of amalgamated controller is ideally suited for handling
both the nonlinear dynamics of the generic PWEC’s pendulum and for tracking
the ideal angular position for said pendulum [55–59].
The equation of motion for the pendulum, (3.22), is nonlinear and thus the pendulum’s dynamics are not readily available for LQR theory. Fortuitously, one can
utilize a model predictive control scheme to approximate the pendulum’s dynamics as a linear system for relatively brief time horizons. Thus, a model predictive
controller uses brief time steps to estimate the pendulum’s dynamics and thus
necessitates a continual, ”on-the-fly” cost-minimizing control strategy.
62
Ensuring the pendulum follows an ideal angular position trajectory is the duty
bestowed upon the integral error controller. The integral error controller accounts
for the difference between the ideal pendulum position and the actual pendulum
position, a difference—the error—that should be minimized. Note therefore, that
the ideal pendulum position is a function, r(t), that is dependent upon the wave
profile in which the generic PWEC is being subjected to.
LQR control theory itself is what ultimately binds the model predictive controller and the integral error controller together. LQR control theory seeks to find
the optimal generator moment, Mgen , by minimizing a quadratic cost function [59].
The quadratic cost function is how a PWEC designer can define “good” pendulum
performance. In this case, a quadratic cost function can be used to define:
1. The importance of the pendulum’s position at some particular time.
2. The importance of the pendulum’s positioning during some duration of time.
3. The significance of error between ideal and actual pendulum position.
4. The appropriate amount of control to be utilized.
Sub-Section 6.2.1 describes the necessary transformation of the pendulum’s
equation of motion (pendulum EOM), prepping it for control design. Sub-Section
6.2.2 describes the implementation of the model predictive aspect of the controller.
Sub-Section 6.2.3 proscribes the integral error controller. Finally, Sub-Section
6.2.4 performs the necessary amalgamation of a model predictive controller with
an integral error controller via LQR theory. In whole, these sections describe a
controller capable of implementing the control strategy defined in Section 6.1.
63
6.2.1 2nd Order to 1st Order Conversion—Pendulum’s EOMs
Recalling equation of motion for the generic PWEC’s pendulum (3.22),
φ̈ =
−mp g Rp sin(φ) sin(θ) + Md + Mgen
mp Rp2
and converting it into two first order differential equations and state-space form,
Υ̇1 = Υ2
(6.1)
and
Υ̇2 =
−mp g Rp sin(Υ1 ) sin(θ) + Md + Mgen
(6.2)
mp Rp2
where
Υ1 = φ(t)
(6.3)
Υ2 = φ̇(t) .
(6.4)
and
64
Thus, the Pendulum EOM is now a set of coupled first order equations given by
Υ2
Υ̇1
Υ̇ =
=
−mp g Rp sin(Υ1 ) sin(θ) + Md + Mgen
Υ̇2
m R2
p
.
(6.5)
p
Note to reader: Bold variables, such as Υ̇, denote matrices or vectors. In a similar
fashion, bold zeros such as 0 represent a matrix or vector filled with zeros.
6.2.2 Model Predictive Controller
In order to convert (6.5) into a linear equation, (6.5) needs to be of the form
Υ̇mpc = [Ampc (t)] [Υ] + Bu u(t) .
(6.6)
The matrix [Ampc ] is the model predicted system dynamics matrix for the pendulum and can be developed, and therefore predicted, in any manner the control
designer sees fit; an application specific task. In the case of this work, and as a
precursor to future, more elaborate prediction methods,
Υ2
[Ampc (t)] =
−mp g Rp sin(Υ1 ) sin(θ) + Md + Mgen
mp Rp2 Υ1
and is updated at each time step.
(6.7)
65
In order to specifically control the pendulum’s position,
0
Bu =
1
(6.8)
u(t) = Mgen ,
(6.9)
and
whilst keeping in mind
Υ1
[Υ] =
.
Υ2
(6.10)
Therefore, (6.6) becomes
Υ̇mpc
Υ1 0
= [Ampc (t)]
+ Mgen .
Υ2
1
(6.11)
6.2.3 Integral Error Controller
The error dynamics of the pendulum positioning are defined by
ėI = r(t) − φ(t) .
(6.12)
66
When written with respect to state-space form and the output matrix [Cy ], the
error dynamics, (6.12), becomes
ėI = − [Cy ] [Υ] + r(t) .
(6.13)
Keeping in mind that
Cy = 1 0
(6.14)
and where r(t) is the ideal pendulum position—the reference function for which
the controller shall seek to follow.
6.2.4 Combining Controllers via LQR Control Theory
Combining the results from Sub-Sections 6.2.2 and 6.2.3, the augmented state
equation is given by
0
Υ̇mpc Ampc 0 Υ Bu
u(t) + r(t)
=
+
ėI
−Cy 0
eI
0
I
(6.15)
and whose corresponding cost function is chosen to be
Z
J=
tf
ΥT
ti
eI T
0 0 Υ
T
+ u (t) R u(t) dt ,
0 I
eI
(6.16)
67
where ti and tf are the initial and final times respectively for each time step;
∆t = tf − ti . Note also that
0 0
Q=
.
0 I
(6.17)
Minimizing the cost function (6.2.4) by solving its corresponding algebraic Riccati
equation for P (t), given by
0 = −P(t)A − AT P(t) − Q + P(t)Bu R−1 Bu T P(t) ,
(6.18)
allows for the derivation of the controller’s gain matrix, K(t), given by
− K(t) = −R−1 Bu T P(t) .
(6.19)
Therefore, the generator control moment can be further defined as
Υ
u(t) = Mgen = −K(t)
.
eI
(6.20)
Note, that the weighting matrices (or weighting values) allow for the control
designer to define the “cost” of error in tracking and in implementing control. Increasing the error weighting Q causes more emphasis on proper, more accurate
tracking. Increasing the control weighting R will cause less control to be used.
These weighting matrices or values are determined by trial and error in accor-
68
dence to how well the control designer wants the pendulum to follow the reference
function, r(t), and how much control, u(t), should be used.
69
Chapter 7: Simulation Results Of A Generic PWEC
Results from three simulations are presented here. The first simulation is based
on the a PWEC without applied, active control of its pendulum dynamics. The
second simulation employs active control of the PWEC’s pendulum and enforces
unidirectional rotation. The third simulation also employs active control like the
second, but allows the pendulum to rotate in both clockwise and counterclockwise
directions. All simulations place the generic PWEC, described in Chapter 3, within
the same irregular ocean wave environment, described in Chapter 4. In summary,
the first simulation reported here precludes the use of the active controller developed in Chapter 6, while the second and third simulations do not. Furthermore,
in the interest of consistency, all three simulations have their PWEC moving in
identical manners; each simulation has their PWEC responding to heave (see Figure 7.1) and pitch (see Figure 7.2) in identical manners. In this way, the relative
difference of net electric power generation between the two simulations defines how
useful the active control strategy is, the underlining purpose of this paper.
70
Position of PWEC in Heave
2
1.5
Heave (m)
1
0.5
0
−0.5
−1
−1.5
−2
50
100
150
200
250
300
350
400
450
500
550
Time (s)
Figure 7.1: Plot representing the position of the PWEC in heave for the duration
of approximately 600 seconds.
Orientation of PWEC in Pitch
Pitch Angle (degrees)
10
5
0
−5
−10
50
100
150
200
250
300
350
400
450
500
550
Time (s)
Figure 7.2: Plot representing the orientation of the bidirectional pendulum controlled PWEC in pitch for the duration of approximately 600 seconds.
71
The following figure illustrates the developments and paths taken to produce
the simulations below and is intended to summarize the previous chapters and
their necessary developments.
Defining Control
Strategy for
Increased Net Power
Production
Development of
Ocean Wave
Environment
Development of
Marine
Hydrokinetics
Development of
Generic PWEC
Equations of Motion
Utilization of Error
Tracking Controller
Combining
Controllers Through
the use of LQR
Theory
Development of
Reference Function
for which the
Controller Tracks
Simulation
Effectuated
Utilization of Model
Predictive Controller
Figure 7.3: Flow chart representing the paths taken for simulations to occur; a
review of the preceding chapters that resulted in the production of the
simulation results presented in this chapter.
7.1 Reference Function Development
The reference function, r(t), is needed by the controller to define the ideal trajectory for the PWEC’s pendulum and is directly dependent upon the wave profile, η,
in which the generic PWEC is being subjected to. As such, forward knowledge of
72
the wave profile is needed to develop said reference function. Assuming complete
forward wave knowledge is possible, the controller can then identify the locations
of crests and troughs and thus define the proper orientation of the PWEC’s pendulum as a function of time; this is the reference function r(t). For the purpose
of establishing a baseline, orienting the reader, and utilizing an ideal situation for
reference function creation, a monochromatic regular wave will be used to generate
r(t) first. Note however, the actual simulation results presented in this chapter will
be solely based on irregular waves.
7.1.1 Reference Function Generation—Regular Waves
With respect to a regular wave profile (see Figure 4.1), crests and troughs occur
on a regular basis and as such its associated reference function is a linear function
whose slope is equal to the angular frequency of the monochromatic wave, see
Figure 7.5. Thus, a PWEC’s pendulum following this reference function is in
direct resonance with the regular wave, see Figures 7.4 and 7.5.
73
Regular Wave: Slope of Wave
0.06
Slope of Wave
0.04
0.02
0
−0.02
−0.04
−0.06
0
5
10
15
20
25
30
Time (s)
Slope of Wave
Location of Crest or Trough of Wave
Figure 7.4: Plot represents the slope of the wave at X0h = 0 as it changes in time
for 30 seconds. Black, data points indicate the moments in time where
the PWEC encounters either a wave crest or a wave trough. Plot is
based on a regular wave with a wave height of 3 meters and a wave
period of 10 seconds.
74
Ideal Angular Position of Pendulum (rads)
Regular Wave: Reference Function for Pendulum Angular Position
14
12
10
8
6
4
2
0
5
10
15
20
25
Time (s)
Reference Function to Track
Location of Crest or Trough of Wave
Figure 7.5: Plot indicates the relationship between time and the angular position
of the pendulum for a regular wave with a wave height of 3 meters
and a wave period of 10 seconds; this is the reference function the
controller tracks. Black data points indicate points in time where the
PWEC encounters either a wave crest or a wave trough. Note, the
continuous positive slope indicates that the pendulum is consistently
rotating counterclockwise about the Z2 axis.
75
7.1.2 Reference Function—Irregular Wave
With respect to an irregular wave, however, the resonant state is more obscured
and the ideal pendulum trajectory can no longer be based on a singular linear
reference function. Crests and troughs occur at irregular intervals and thus the
reference function becomes a series of connecting points that do not produce a
linear relationship between time and angular pendulum position, see Figures 7.6
and Figures 7.7. Thus, a fundamental difference exists between a reference function
based on a regular wave environment and a reference function based on an irregular
wave.
Irregular Wave: Slope of Wave
0.15
Slope of Wave
0.1
0.05
0
−0.05
−0.1
−0.15
−0.2
−0.25
0
5
10
15
20
25
30
Time (s)
Slope of Wave
Location of Crest or Trough of Wave
Figure 7.6: Plot represents the slope of the wave at X0h = 0 as it changes in time
for 30 seconds. Black data points indicate the moments in time where
the PWEC encounters either a wave crest or a wave trough. Plot is
based on an irregular wave with a significant wave height of 3 meters
and a significant wave period of 10 seconds.
76
Ideal Angular Position of Pendulum (rads)
Irregular Wave: Reference Function for Pendulum Angular Position
50
45
40
35
30
25
20
15
10
5
0
5
10
15
20
25
Time (s)
Reference Function to Track
Location of Crest or Trough of Wave
Figure 7.7: Plot indicates the relationship between time and the angular position
of the pendulum for an irregular wave with a significant wave height
of 3 meters and a significant wave period of 10 seconds; this is the
reference function the controller tracks. Black data points indicate in
time where the PWEC encounters either a wave crest or a wave trough.
7.2 Uncontrolled Pendulum Generic PWEC Simulation Results
The results of subjecting a PWEC without active pendulum control in an irregular
wave environment are presented here. Essential simulation parameters are listed
in Table 7.1 and the consequential PWEC kinematics plots are give in Figures 7.8
through 7.11. The generator damping coefficient, Cgen , used by the uncontrolled
PWEC was found, through trial and error, with the value being selected that
produced the greatest mean net electric power for the irregular wave.
Figure 7.8 presents the time series angular position of the PWEC’s pendulum
for the duration of the simulation. Figure 7.9 presents the time series angular
77
velocity of the PWEC’s pendulum for the duration of the simulation. Figure 7.10
presents the time series generator moment of the PWEC for the duration of the
simulation. Figure 7.11 presents the time series net electric power generation of
the PWEC for the duration of the simulation.
Table 7.1: Simulation Results of Uncontrolled Generic PWEC in Irregular Waves
Parameter
Value
Significant Wave Height Hs
3m
Significant Wave Period Ts
10 seconds
Simulation Duration
10 minutes
PWEC Diameter
5m
PWEC Height
2.5 m
Pendulum Arm Length
1.7 m
Pendulum Mass
2000 kg
Generator Damping Coefficient Cgen
-674.9
Resultant Mean Net Generator Power
170 watts
Resultant Max Net Generator Power
2982 watts
N ·m·s
rad
78
Angular Position of Pendulum
Angular Position (degrees)
2500
2000
1500
1000
500
0
0
100
200
300
400
500
600
Time (s)
Figure 7.8: Plot representing the angular position of the uncontrolled generic
PWEC’s pendulum for the duration of approximately 600 seconds.
Angular Velocity Of Pendulum
120
100
Angular Velocity (degrees/s)
80
60
40
20
0
−20
−40
−60
−80
0
100
200
300
Time (s)
400
500
600
Figure 7.9: Plot representing the angular velocity of the uncontrolled generic
PWEC’s pendulum for the duration of approximately 600 seconds.
79
Generator Moment
1000
Moment (Nm)
500
0
−500
−1000
50
100
150
200
250
300
350
400
450
500
550
600
Time (s)
Figure 7.10: Plot representing the generator moment as a function of time for an
uncontrolled generic PWEC.
Generator Power
2500
Power (watts)
2000
1500
1000
500
0
50
100
150
200
250
300
350
400
450
500
550
600
Time (s)
Figure 7.11: Plot representing the (net) electric power generated by an uncontrolled
generic PWEC for the duration of approximately 600 seconds.
80
7.3 Actively Unidirectional Pendulum Controlled Generic PWEC
Simulation Results
The results of subjecting a generic PWEC to an irregular wave environment with
an actively unidirectional controlled pendulum are presented here. The purpose of
the control scheme is to enforce unidirectional pendulum rotation in resonance with
the crests and troughs of the irregular wave environment. Simulation parameters
are listed in Table 7.2 and the consequential PWEC kinematics are given in Figures
7.12 through 7.15.
Figure 7.12 presents the time series angular position of the PWEC’s pendulum
for the duration of the simulation. Figure 7.13 presents the time series angular
velocity of the PWEC’s pendulum for the duration of the simulation. Figure 7.14
presents the time series generator moment of the PWEC for the duration of the
simulation. Figure 7.15 presents the time series net electric power generation of
the PWEC for the duration of the simulation.
81
Table 7.2: Simulation Results of a Generic PWEC in Irregular Waves with an
Actively Unidirectional Controlled Pendulum
Parameter
Value
Significant Wave Height Hs
3m
Significant Wave Period Ts
10 seconds
Simulation Duration
10 minutes
PWEC Diameter
5m
PWEC Height
2.5 m
Pendulum Arm Length
1.7 m
Pendulum Mass
2000 kg
Generator Damping Coefficient Cgen
continuously controlled
Resultant Mean Net Generator Power
-205 watts
Resultant Max Net Generator Power
18700 watts
82
x 10
Angular Position of Pendulum
4
5.5
Angular Position (degrees)
5
4.5
4
3.5
3
2.5
2
1.5
1
0.5
0
100
200
300
400
500
600
Time (s)
Figure 7.12: Plot representing the angular position of the unidirectional controlled
pendulum for the duration of approximately 600 seconds.
Angular Velocity Of Pendulum
160
Angular Velocity (degrees/s)
140
120
100
80
60
40
20
0
0
100
200
300
Time (s)
400
500
600
Figure 7.13: Plot representing the angular velocity of the unidirectional controlled
pendulum for the duration of approximately 600 seconds.
83
Generator Moment
14000
12000
10000
Moment (Nm)
8000
6000
4000
2000
0
−2000
−4000
−6000
50
100
150
200
250
300
350
400
450
500
550
600
Time (s)
Figure 7.14: Plot representing the generator moment as a function of time. This is
the applied control for an unidirectional pendulum controlled generic
PWEC.
84
x 10
Generator Power
4
1.5
1
0.5
Power (watts)
0
−0.5
−1
−1.5
−2
−2.5
−3
−3.5
50
100
150
200
250
300
350
400
450
500
550
600
Time (s)
Figure 7.15: Plot representing the net electric power generated by an unidirectional pendulum controlled generic PWEC over the course of approximately 600 seconds.
85
7.4 Actively Bidirectional Pendulum Controlled Generic PWEC Simulation Results
The results of subjecting a PWEC to an irregular wave environment with an actively bidirectional controlled pendulum are presented here. The purpose of the
control scheme is to enforce rotation of the pendulum to be in resonance with the
crests and troughs of the irregular wave environment, but unlike the unidirectional
controlled pendulum, the pendulum in this simulation is allowed to swing in both
clockwise and counterclockwise directions. Simulation parameters are listed in Table 7.3 and the consequential PWEC kinematics are give in Figures 7.16 through
7.19.
Figure 7.16 presents the time series angular position of the PWEC’s pendulum
for the duration of the simulation. Figure 7.17 presents the time series angular
velocity of the PWEC’s pendulum for the duration of the simulation. Figure 7.18
presents the time series generator moment of the PWEC for the duration of the
simulation. Figure 7.19 presents the time series net electric power generation of
the PWEC for the duration of the simulation.
86
Table 7.3: Simulation Results of an Actively Controlled Bidirectional Generic
PWEC in Irregular Waves
Parameter
Value
Significant Wave Height Hs
3m
Significant Wave Period Ts
10 seconds
Simulation Duration
10 minutes
PWEC Diameter
5m
PWEC Height
2.5 m
Pendulum Arm Length
1.7 m
Pendulum Mass
2000 kg
Generator Damping Coefficient Cgen
continuously controlled
Resultant Mean Net Generator Power
230 watts
Resultant Max Net Generator Power
5000 watts
87
Angular Position of Pendulum
120
Angular Position (degrees)
110
100
90
80
70
60
50
40
30
0
100
200
300
400
500
600
Time (s)
Figure 7.16: Plot representing the angular position of the bidirectional controlled
pendulum for the duration of approximately 600 seconds.
Angular Velocity Of Pendulum
50
Angular Velocity (degrees/s)
40
30
20
10
0
−10
−20
0
100
200
300
Time (s)
400
500
600
Figure 7.17: Plot representing the angular velocity of the bidirectional controlled
pendulum for the duration of approximately 600 seconds.
88
x 10
Generator Moment
4
1
0.8
0.6
Moment (Nm)
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
50
100
150
200
250
300
350
400
450
500
550
600
Time (s)
Figure 7.18: Plot representing the generator moment as a function of time. This is
the applied control for an bidirectional pendulum controlled generic
PWEC.
89
Generator Power
4000
3000
Power (watts)
2000
1000
0
−1000
−2000
−3000
−4000
50
100
150
200
250
300
350
400
450
500
550
600
Time (s)
Figure 7.19: Plot representing the net electric power generated by an bidirectional
pendulum controlled generic PWEC over the course of approximately
600 seconds.
90
Chapter 8: Conclusion
While unidirectional rotation of a pendulum is needed to achieve max power, simulation results indicate that a control strategy seeking to enforce such a policy, with
the controller defined in Section 6.1, will result in negative net electric power generation over time; more power is being consumed to effectuate that particular type
of control than what is being generated. Thus, while the actively unidirectional
controlled pendulum simulated in Section 7.3 produced the largest max (peak)
power of 18700 watts, it was the bidirectional controlled pendulum of Section 7.4
that produced the highest mean (continuous) net generator power output of any
of the simulations from Chapter 7. Furthermore, the bidirectional controlled pendulum’s mean net electric power output was 35 percent higher when compared to
the generic PWEC with the uncontrolled pendulum.
Therefore, the underlying purpose of this work in striving to develop an active
control scheme, such that a generic PWEC’s conversion of ocean wave energy into
electricity is increased, has been successful. As mentioned previously, however, the
nascent nature of ocean wave energy conversion, insist on the continual development of the research presented in this thesis and as such the aforementioned results
are indeed a thread in a tapestry that is presently still being woven.
91
8.1 Future Work
Moving forward, the author planes to verify aspects of the results presented in
this work with a PWEC prototype. Doing so will necessitate the development
of further PWEC simulations which include more degrees of freedom, inclusion of
mooring dynamics, inclusion of actual generator parameters, and the use of a more
powerful(or greater inclusion of) software relating to marine hydrokinetics (e.g.,
Ansys AQWA, WAMIT, and/or SEAFEA).
The control schemes investigated in this work assumed forward and complete
wave knowledge. Due to the stochastic nature of ocean waves, however, one cannot
completely anticipate and predict the exact wave parameters. What is needed for
an actual real PWEC deployed in the ocean, is a method to discern, in an adequate
fashion, the irregular ocean wave profile utilizing a probabilistic approach such as
through the use of a neural net. In this way, a PWEC, or an array of PWECs in
the ocean can input, in real-time, known wave parameters from the surrounding
area (e.g. from data acquisition buoys) to feed the neural net and thus make an
approximation of the wave profile for the PWEC(s) controller.
Furthermore, by embedding a model predictive controller within the proposed
PWEC prototype, one should be able to handle similar stochastic issues by continually adapting the Ampc matrix and how it’s derived as more and more information
of the ocean wave environment is given to said controller. In this sense, a learning based control strategy would be useful as a future addition to the controller
developed in this work.
92
Ultimately, however, the ambition of the presented research is to provide control strategies that will enable not only the aforementioned prototype to produce
greater net electric power, but should allow other PWEC developers to refer to and
reference from. In this manner, the process of PWEC development is facilitated
and the promotion of ocean wave energy as a viable, sustainable, and renewable
means to produce electricity for the world is presented.
93
Bibliography
[1] D. K. P. Yue, “M.I.T. 2.20 Marine Hydrodynamics: Lecture 21,” http://web.
mit.edu/2.20/www/, Fall 2011.
[2] N. Hogben, “Wave loads on structures,” Proceedings of BOSS, vol. 1, pp.
187–219, 1976.
[3] M. C. Deo, “Wave forces on large diameter members,” http://www.civil.iitb.
ac.in/∼mcdeo/images/ch10.pdf/, department of Civil Engineering; Indian Institute of Technology Bombay.
[4] S. C. Hench, “System and method for converting ocean wave energy into
electricity,” United States of America Patent US 7 737 569 B2, 06 15, 2010.
[5] Wello, “Penguin wave energy solution,” http://www.wello.eu/penguin.php,
2013.
[6] Neptune Wave Power,
“Technology architecture,”
http://www.
neptunewavepower.com/index.php/technology/page/architecture/, 2013.
[7] J. G. Bretl, “A time domain model for wave induced motions coupled to
energy extraction,” Ph.D. dissertation, The University of Michigan, 2009.
[8] J. Cruz, Ocean Wave Energy: Current Status and Future Prepectives, ser.
Green Energy and Technology Series. Springer London, Limited, 2008.
[9] B. Drew, A. R. Plummer, and M. N. Sahinkaya, “A review of wave energy
converter technology,” Institution of Mechanical Engineers: Journal of Power
and Energy, vol. 223, pp. 887–902, 2009.
[10] P. Lenee-Bluhm, “The wave energy resource of the U.S. pacific northwest,”
Master’s thesis, Oregon State University, 2010.
[11] United States Central Intelligence Agency. The world factbook, electricity sources. Webpage. [Online]. Available: https://www.cia.gov/library/
publications/the-world-factbook/geos/xx.html
94
[12] International Energy Agency. (2012, November) World energy outlook 2012. [Online]. Available:
http://www.oecd-ilibrary.org/energy/
world-energy-outlook-2012 weo-2012-en
[13] United States Central Intelligence Agency. The world factbook, electricity
consumption. Webpage. [Online]. Available: https://www.cia.gov/library/
publications/the-world-factbook/rankorder/2042rank.html
[14] The World Bank. The world bank, electric power consumption. Webpage.
[Online]. Available: http://data.worldbank.org/indicator/EG.USE.ELEC.
KH?cid=GPD 31
[15] Independent Statistics & Analysis, United States Energy Information
Administration. Fossil fuels generate most u.s. power. Webpage. [Online].
Available: http://www.eia.gov/energyexplained/index.cfm?page=electricity
in the united states
[16] Independent Statistics Analysis United States Energy Information Administration, “Carbon dioxide produced per kilowatt-hour when generating electricity with fossil fuels,” http://www.eia.gov/tools/faqs/faq.cfm?id=74&t=11.
[17] Independent Statistics & Analysis, United States Energy Information
Administration. Carbon dioxide emissions associated with electricity
generation. Webpage. [Online]. Available: http://www.eia.gov/tools/faqs/
faq.cfm?id=77&t=11
[18] R. Harrabin, “Arctic ocean ’acidifying rapidly’,” http://www.bbc.co.uk/
news/science-environment-22408341, May 2013.
[19] R. Black, “An acid test for policy,” http://www.bbc.co.uk/news/
science-environment-16677867, January 2012.
[20] T. R. Karl and K. E. Trenberth, “Modern global climate change,” Science,
vol. 302, no. 5651, pp. 1719 – 1723, December 2003.
[21] T. E. N. Limited, Ed., The Economist, Wave Power, The Coming
Wave, The Economist Newspaper Limited, June 2008. [Online]. Available:
http://www.economist.com/node/11482565
[22] S. H. Salter, “Wave power,” Nature, vol. 249, pp. 720–724, 1974.
95
[23] R. Curran and L. Gato, “The energy conversion performance of several types
of wells turbine designs,” Proceedings of the Institutino of Mechanical Engineers Part A - Journal of Power and Energy, vol. 211, pp. 133–145, 1997.
[24] M. A. Mueller, “Electrical generators for direct drive wave energy converters,”
IEEE Proceedings-generation Transmission and Distribution, vol. 149, no. 4,
pp. 446–456, Jul. 2002.
[25] M. Ehsan, W. Rampen, and J. Taylor, “Simulation and dynamic response
of computer controlled digital hydraulic pump/motor system used in wave
energy power conversion,” in 2nd European Wave Power Conference, 1995
1995, pp. 305–311.
[26] A. J. Crerar and C. L. Pritchard, “Wavepowered desalination - experimental
and mathematical-modeling,” Desalination, vol. 81, no. 1-3, pp. 391–398, Jul.
1991.
[27] P123, “Pelamis wave energy converter on site at the european marine energy
test centre (EMEC),” http://en.wikipedia.org/wiki/File:Pelamis at EMEC.
jpg, September 2008, Public Domain.
[28] O. P. Technologies, “OPT’s PB150 PowerBuoy successfully deployed at sea
in April 2011 by a team including Scotland-based Global Maritime Scotland
Ltd, Port Services (Invergordon) Ltd, and OPT, with the support of the
Cromarty Firth Port Authority. Generates Renewable energy through Wave
power- Peak-rated power output of 150 kilowatts.” http://en.wikipedia.org/
wiki/File:Optbuoy.jpg, April 2012, Copyleft: Free Art License.
[29] The University of Edinburgh, School of Engineering. (2013, May) Salter’s
duck. http://www.mech.ed.ac.uk/research/wavepower/duck/.
[30] F. Gardner, “Archimedes wave swing,” http://www.teamwork.nl/en/
portfolio/project/archimedes-wave-swing, January 2008.
[31] L. Cameron, R. Doherty, A. Henry, K. Doherty, J. Van’t Hoff, D. Kaye, and
D. Naylor, “Design of the next generation of the oyster wave energy converter,”
in 3rd International Conference on Ocean Energy, 2010.
[32] Aquamarine Power, “Technology: How oyster wave power works,” http:
//www.aquamarinepower.com/technology/how-oyster-wave-power-works/,
2011.
96
[33] Queen’s
University
Belfast,
“Limpet,”
http://www.qub.ac.uk/
research-centres/WelcometoSustainableDevelopmentatQueens/
RelatedResearch/LIMPET/, 2013.
[34] L. S. Slotta, “The potential of ocean water waves for recoverable power,”
Proposal for National Science Foundation, July 1975.
[35] R. T. Hudspeth and L. S. Slotta, “Wave power extraction from a transient
heaving cylinder,” Journal of Ship Research, vol. 25, no. 2, pp. 141–145, 1981.
[36] A. C. Brown, “Towards reliable and survivable ocean wave energy converters,”
Master’s thesis, Oregon State University, 2009.
[37] E. B. Agamloh, A. K. Wallace, and A. von Jouanne, “A novel direct-drive
ocean wave energy extraction concept with contact-less force transmission
system,” Renewable Energy, vol. 33, no. 3, pp. 520–529, Mar. 2008.
[38] D. E. Elwood, “Evaluation of the performance of a taut-moored dual-body
direct-drive wave energy converter through numerical modeling and physical
testing,” Ph.D. dissertation, Oregon State University, July 2008.
[39] Northwest National Marine Renewable Energy Center. (2013, May) Our mission. http://nnmrec.oregonstate.edu/our-impact.
[40] E. C. Hinck III, “Wave power generator,” United States of America
Patent 3 231 749, Jan 25, 1966. [Online]. Available: http://www.google.com/
patents/US3231749
[41] ANSYS, “ANSYS AQWA: Proven technology for design and analysis of mobile offshore structures,” ANSYS, Brochure, 2010. [Online]. Available: http://www.ansys.com/staticassets/ANSYS/staticassets/
resourcelibrary/brochure/ansys-aqwa-brochure.pdf
[42] C. J. Stillinger, “On the study of wec prototype advancement with consideration of real-time life extending control,” Ph.D. dissertation, Oregon State
University, August 2011.
[43] J. A. Wensing, “On the dynamics of ball bearings,” Ph.D. dissertation, University of Twente, Enschede, The Netherlands, December 1998.
[44] P. D. Choudhury, “Notes on fluid film journal bearing-overview,” http://www.
pranrda.com/papers/NotesOnFluidFilmJournalBearing-Overview.pdf.
97
[45] EPRI Project Manager: Jacobson, P., “Mapping and assessment of the united
state ocean wave energy resource,” Electric Power Research Institute, Tech.
Rep. 1024637, 2011.
[46] R. Dean and R. Dalrymple, Water Wave Mechanics for Engineers and Scientific, ser. Advanced Series in Ocean Engineering, V. 2. World Scientific
Publishing Company, Incorporated, 1991.
[47] Y. Goda, Random Seas and Design of Maritime Structures (3rd Edition), ser.
Advanced series on ocean engineering. World Scientific Publishing Company,
Incorporated, 2010.
[48] ——, “Statistical variability of sea state parameters as a function of a wave
spectrum,” Coastal Engineering in Japan, vol. 31, pp. 39–52, 1988.
[49] J. Falnes, Ocean Waves and Oscillating Systems: Linear Interactions Including Wave-Energy Extraction. Cambridge University Press, 2005.
[50] J. Newman, Marine hydrodynamics. Wei Cheng Cultural Enteroprise Company, 1977.
[51] C. Mei, The Applied Dynamics of Ocean Surface Waves, ser. Advanced Series on Ocean Engineering, Vol 1. World Scientific Publishing Company,
Incorporated, 1989.
[52] B. Sumer and J. Fredsøe, Hydrodynamics around cylindrical structures, ser.
Advanced Series on Ocean Engineering, V. 12. World Scientific Publishing
Company Incorporated, 1997.
[53] T. Sarpkaya, Wave Forces on Offshore Structures.
Press, 2010.
Cambridge University
[54] J. Wilson, Dynamics of Offshore Structures. Wiley, 2003.
[55] C. Garcia, D. Prett, and M. Morari, “Model predictive control: Theory and
practice — a survey,” Automatica, vol. 25, pp. 335–348, 1989.
[56] D. Q. Mayne, “Receding horizon control of nonlinear systems,” Automatic
Control, IEEE Transactions on, vol. 35, pp. 814–824, 1990.
98
[57] D. Q. Mayne, J. B. Rawlings, C. V. Rao, and P. O. M. Scokaert, “Constrained
model predictive control: Stability and optimality,” Automatica, vol. 36, pp.
789–814, 200.
[58] T. K. A. Brekken, “On model predictive control for a point absorber wave
energy converter,” In PowerTech, vol. 1, pp. 1–8, 2011.
[59] J. Burl, Linear optimal control: H2 and H∞ methods. Addison Wesley Publishing Company Incorporated, 1999.