Document 12465202
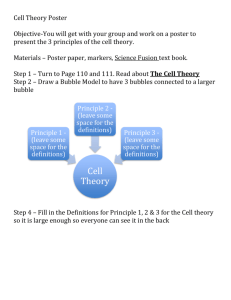
advertisement

AN ABSTRACT OF THE THESIS OF Florian Kapsenberg for the degree of Master of Science in Mechanical Engineering presented on May 27, 2011. Title: Lateral Fluid Motion in Nucleate Boiling Through Asymmetric Surface Structures Abstract approved: ________________________________________________________________________ Vinod Narayanan This thesis presents a feasibility study of a means to passively effect liquid motion parallel to a heated surface though surface geometrical modifications. Such a passive system is beneficial for electronics cooling applications as it reduces the pumping equipment normally required in flow loops and is desired for space applications, where launch costs greatly restrict the weight of onboard systems. The surface geometry considered was a repeated array of asymmetric silicon ratchets with reentrant cavities located on the shallow face. A serpentine thin film heater provided heat to the surface. A complete experimental facility in which to perform experiments was designed and constructed as part of this work to comply with requirements set by microgravity flight services in anticipation of future experiments in microgravity. Experiments were performed using deionized and degassed water at atmospheric pressure at subcoolings of 5°C and 20°C. Applied area averaged heat flux was varied between 2 W/cm2 and 19 W/cm2 at these conditions. Magnified high-speed videos were used to resolve bubble behavior near the surface. A preferential bubble growth and departure direction was confirmed for both subcoolings and lateral fluid motion was confirmed in the high subcooling condition. Repeatability was confirmed with separate experiment performed 58 days later. Tracking of bubbles was accomplished using a custom bubble-tracking algorithm, designed to resolve only bubbles within a two-dimensional plane normal to the viewing direction. Instantaneous velocities of individual bubbles parallel to the surface were shown to be in excess of 600 mm/s immediately following departure, and liquid flows with mean velocities between 25 mm/s and 35 mm/s parallel to surface were observed in the plume farther from the surface. A simplified semi-empirical model of bubble growth phase is proposed to explain the observed mean liquid velocities. ©Copyright by Florian Kapsenberg May 27, 2011 All Rights Reserved Lateral Fluid Motion in Nucleate Boiling Through Asymmetric Surface Structures by Florian Kapsenberg A THESIS submitted to Oregon State University in partial fulfillment of the requirements for the degree of Master of Science Presented May 27, 2011 Commencement June 2011 Master of Science thesis of Florian Kapsenberg presented on May 27, 2011 APPROVED: ________________________________________________________________________ Major Professor, representing Mechanical Engineering ________________________________________________________________________ Head of the School of Mechanical, Industrial, and Manufacturing Engineering ________________________________________________________________________ Dean of the Graduate School I understand that my thesis will become part of the permanent collection of Oregon State University libraries. My signature below authorizes release of my thesis to any reader upon request. ________________________________________________________________________ Florian Kapsenberg, Author ACKNOWLEDGEMENTS I express my sincere thanks to my advisor Dr. Vinod Narayanan for providing excellent guidance throughout my research, for providing meaningful feedback, and for always remaining calm when things seem to take a turn for the worst. I greatly appreciate the freedom Dr. Narayanan has provided me in the design, construction, and experimental phases of my research. His expertise and understanding was crucial to the successful outcome of this project. I would like to thank Dr. Sushil Bhavnani and Naveenan Thiagarajan at Auburn University for their collaboration on this project and for their hard work in producing the silicon wafers that made this project a success. Without their tireless efforts this project would not have been possible. I owe great thanks to Dr. James Liburdy and Dr. Nancy Squires for providing research opportunities and the inspiration to study Thermal-Fluid Sciences during my undergraduate career at Oregon State University. Dr. Squires’ Thermodynamics course was truly one of my favorite at OSU, and I am grateful for having had Dr. Liburdy as my senior project advisor and for having provided me with the opportunity to work at the wind tunnel facility. I thank my family for supporting me all these years, my girlfriend Agata Szewczuk for her support and, along with my friends David McIntosh, Kevin Harada, Jesse Grimes, and Joe Hortnagl, for providing the periodically necessary distractions from academic work. Lastly, I thank my lab mates Ruander Cardenas, Preeti Mani, David Haley, Mohammad Tabatabaee, and Mohammad Ghazvini and all my student colleagues in the Thermal-Fluid Sciences group for helping me along the way. Financial assistance for the project was provided by NSF under grant number 0854503 and by NASA under grant number NNX09AJ98G. TABLE OF CONTENTS Page 1. INTRODUCTION ............................................................................................................................................ 1 2. LITERATURE REVIEW ................................................................................................................................ 5 2.1. The Pool Boiling Curve ....................................................................................................................... 5 2.2. Forces on a Bubble............................................................................................................................... 8 2.3. Pool Boiling in Microgravity .......................................................................................................... 12 2.4. Pool boiling using augmented surface geometries............................................................... 14 2.5. Conclusions on Literature Review .............................................................................................. 20 3. SCOPE .............................................................................................................................................................. 21 3.1. Objectives and Tasks......................................................................................................................... 21 4. EXPERIMENTAL FACILITY ..................................................................................................................... 23 4.1. Existing Microgravity Simulation Methods and Facilities ................................................. 23 4.2. Test Section........................................................................................................................................... 28 4.3. Experimental Facility Requirements.......................................................................................... 30 4.4. Initial Chamber Design..................................................................................................................... 31 4.5. Final Chamber Design....................................................................................................................... 33 4.6. Experimental Facility........................................................................................................................ 56 5. EXPERIMENTAL PROCEDURES ............................................................................................................ 66 5.1. Startup Procedure .............................................................................................................................. 66 5.2. Continuous Operating Procedure ................................................................................................ 73 5.3. Shutdown Procedure ........................................................................................................................ 75 6. DATA ANALYSIS .......................................................................................................................................... 77 6.1. Determination of Bubble Kinematics ......................................................................................... 77 6.2. Calibration and Uncertainty Analysis ........................................................................................ 85 TABLE OF CONTENTS (Continued) Page 7. RESULTS AND DISCUSSION.................................................................................................................... 98 7.1. Qualitative Visualization ................................................................................................................. 98 7.2. Bubble Kinematics .......................................................................................................................... 109 7.3. Repeatability ..................................................................................................................................... 121 7.4. Force Balance .................................................................................................................................... 130 8. CONCLUSIONS ........................................................................................................................................... 136 9. RECOMMENDATIONS FOR FUTURE INVESTIGATION............................................................. 138 REFERENCES .................................................................................................................................................. 140 APPENDICES................................................................................................................................................... 143 LIST OF FIGURES Figure Page 1.1 Cross-section of geometry proposed to impart a net momentum on the fluid parallel to the heated surface. ...................................................................................... 3 2.1 Generic pool boiling curve. ............................................................................................ 6 2.2 Pool boiling curve for water under controlled heat flux conditions. ............................ 8 2.3 Forces on a vapor bubble attached to a heated surface. .............................................. 9 2.4 Force exerted on a bubble by the surrounding liquid as a result of bubble growth. ........................................................................................................................ 12 2.5 The pool boiling curve in microgravity. ....................................................................... 14 2.6 Two-dimensional representation of the experimental setup used by Chyu and Fei ......................................................................................................................... 15 2.7 Various slot geometries studied by Das et al. ............................................................. 16 2.8 Experimental results from Stroock et al. ..................................................................... 18 2.9 Leidenfrost effect on asymmetrically structures heated surface as demonstrated by Linke et al. ....................................................................................... 19 4.1 Three orientations required to effectively demonstrate the flow's nongravitational dependence. ........................................................................................... 24 4.2 Configuration of the test section and thin film aluminum heater silicon wafer. ........ 29 4.3 Microscope image of a cavity on the test section with overlaid image of calibrated optical grid. ................................................................................................. 30 4.4 Schematic of test section power and measurement circuit. ....................................... 30 4.5 Wafer holder and clamp designs. ................................................................................ 34 4.6 Transparent view of the wafer holder showing the infrared camera microscope lens position in relation to the test section. ............................................ 35 4.7 Layout of the two flow loops implemented in the experimental facility. ................... 38 4.8 1D resistance network used to determine the minimum tube length required for the condensing coils............................................................................................... 39 LIST OF FIGURES (Continued) Figure Page 4.9 Overview of condensing loop. ..................................................................................... 41 4.10 The chamber’s fill and recirculation loop with emergency overflow protection. ................................................................................................................... 43 4.11 Overview of the components of the fill/drain flow loop. ............................................ 43 4.12 Required laser light sheet incidence angle on the test section as it depends on the test section orientation. ................................................................................... 44 4.13 Selection of the laser light sheet prism. ...................................................................... 46 4.14 The laser light sheet as it is deflected by a prism in the upright orientation. ............. 47 4.15 The laser light sheet as it is deflected by a prism in the inverted orientation. ........... 47 4.16 The laser light sheet as it enters the chamber in the vertical orientation. ................. 48 4.17 Demonstration of the laser light sheet illuminating a bubble..................................... 49 4.18 Infrared camera mounted to custom support designed to interface it with the chamber. ............................................................................................................... 50 4.19 Cutaway view of the infrared camera mounted to the chamber using the custom support............................................................................................................ 51 4.20 Custom bracket designed to relieve the camera's lens mount adaptor from the large cantilever weight of the K2/SC lens. ............................................................ 52 4.21 High-speed camera mounted to the chamber. ........................................................... 53 4.22 LED Array circuit. ......................................................................................................... 54 4.23 A cutaway view of the chamber showing the position of the LED array. .................... 55 4.24 The LED backlighting array. ......................................................................................... 55 4.25 Overview of the experimental facility. ........................................................................ 60 4.26 Static stress analysis performed one of two vertical frame members that support the chamber. .................................................................................................. 62 LIST OF FIGURES (Continued) Figure Page 4.27 3-Axis Accelerometer used to monitor chamber accelerations and act as a high-speed camera trigger........................................................................................... 63 4.28 High-speed camera triggering setup. .......................................................................... 63 4.29 The camera triggering transistor circuit functioning as a solid state relay. ................ 64 4.30 Schematic of electrical connections for the cartridge heater circuit and the experimental facility systems. ..................................................................................... 65 4.31 Overview of various electrical systems in the experimental facility. .......................... 65 5.1 Installation of test section in chamber. ....................................................................... 68 5.2 Flowchart for startup procedures................................................................................ 72 5.3 Flowchart for operation procedures. .......................................................................... 74 5.4 Flowchart for shutdown procedures. .......................................................................... 76 6.1 Stretching the imported image histogram over the full grayscale spectrum.............. 78 6.2 Image processing steps to resolve bubbles. ................................................................ 79 6.3 Tagging of regions during image processing. .............................................................. 81 6.4 Bubble pair area ratio criterion applied. ..................................................................... 82 6.5 Velocity vector map obtained from bubble tracking velocimetry............................... 83 6.6 Estimated outline of bubbles as resolved by the filter. ............................................... 84 6.7 Use of thermocouple extension cables. ...................................................................... 87 6.8 Method of calculating the image resolution. .............................................................. 89 6.9 Vector distortion error in a uniform distortion field. .................................................. 90 6.10 Vector distortion error in a variable distortion field. .................................................. 91 6.11 Magnitude of pixel displacement magnitude due to lens distortion. ......................... 93 6.12 Gradient of pixel displacement magnitude due to lens distortion.............................. 94 LIST OF FIGURES (Continued) Figure Page 6.13 Results of the computation of the angular error in a vector (Eq. 6.11). ..................... 95 6.14 Optical grid placed over the test section to determine accuracy of ratchet period spacing.............................................................................................................. 96 7.1 Sequence of 20 frames at low subcooling (Test 1). ................................................... 100 7.2 Sequence of 20 frames at high subcooling (Test 2). .................................................. 104 7.3 Microscope pictures of each cavity in the test section. ............................................ 108 7.4 Geometry for cavity 2a construed from a microscope image (Fig. 7.3). ................... 109 7.5 Bubble velocity field at low subcooling (Test 1). ....................................................... 111 7.6 Bubble velocity field at high subcooling (Test 2). ...................................................... 116 7.7 Sequence of 20 frames at low subcooling to demonstrate repeatability of the experiment (Test 3) 58 days after Tests 1 and 2. ...................................................... 122 7.8 Sequence of 20 frames at high subcooling to demonstrate repeatability of the experiment (Test 3) 58 days after Tests 1 and 2. ................................................ 126 7.9 Growth of the bubble normal to the surface imparts a net momentum on the fluid. ........................................................................................................................... 131 7.10 Control volume for estimation of liquid plume velocity as it depends on the momentum imparted on the fluid during one bubble growth cycle ........................ 132 7.11 Preliminary reasoning for observed behavior of bubbles in subcooled conditions. ................................................................................................................. 134 LIST OF TABLES Table Page 4.1 Overview of various methods of creating a microgravity environment and common associated parameters ................................................................................. 25 4.2 Advantages and disadvantages of achieving the three-orientation capability by means of a rotatable chamber. .............................................................................. 32 4.3 Material compatibility with 3M FluorinertTM Electronic Liquid (FC-72) ...................... 36 4.4 List of instruments employed in the experimental facility. ......................................... 56 4.5 List of equipment employed in the experimental facility. .......................................... 57 6.1 Uncertainty in any dimensional computation derived from images due to uncertainty in ratchet spacing, pixel count, and lens distortion (maximum as well as RMS)................................................................................................................. 97 7.1 Experimental conditions for the two tests performed in January (Test 1 and Test 2), and the test performed in March (Test 3). ..................................................... 98 7.2 Bubble diameter during growth before departure. .................................................. 133 7.3 Bubble accelerations calculated to determine if Marangoni flow plays a role in the strong acceleration of bubbles immediately after departure. ........................ 135 LIST OF APPENDICES Page Appendix A. Derivation of Marangoni Flow Reaction Force....................................................... 144 Appendix B. Experimental Procedures Specific to FC-72 ............................................................ 145 B.1. Cleaning the Chamber ................................................................................................................... 145 B.2. Filling and Degassing ..................................................................................................................... 145 Appendix C. Bubble Tracking Algorithm ............................................................................................ 146 Appendix D. Data Analysis ........................................................................................................................ 147 D.1. Thermocouple Calibration and Uncertainty Analysis ..................................................... 147 D.2. Applied Heat Flux ........................................................................................................................... 151 Appendix E. Annotated Vector Plots for Tests 1, 2, 3 .................................................................... 152 Appendix F. Part Drawings ....................................................................................................................... 168 LIST OF APPENDIX FIGURES Figure Page C.1 Flowchart for bubble tracking algorithm functions. .................................................. 146 D.1 Calibration curves for each thermocouple. ............................................................... 149 E.1 Labeled vector plots for Test 1. ................................................................................. 153 E.2 Labeled vector plots for Test 2. ................................................................................. 158 E.3 Labeled vector plots for Test 3. ................................................................................. 163 F.1 Assembly drawing of chamber. ................................................................................. 169 F.2 Drawing of chamber wall with laser port cutout and bolt flanges. ........................... 170 F.3 Drawing of chamber wall with wafer holder port cutout and bolt flanges. .............. 171 F.4 Drawing of bottom chamber wall with wafer holder cutout. ................................... 172 F.5 Drawing of top chamber wall with wafer holder cutout. .......................................... 173 F.6 Drawing of side chamber wall with window cutout and thru-holes for condensing equipment and cartridge heaters. ......................................................... 174 F.7 Drawing of side chamber wall with window cutout. ................................................. 175 F.8 Drawing of window clamp. ........................................................................................ 176 F.9 Drawing of circular port cover. .................................................................................. 177 F.10 Drawing of laser port used for experiments in the vertical orientation. .................. 178 F.11 Assembly drawing of laser port used for experiments in the upright and inverted orientation. ................................................................................................. 179 F.12 Drawing of base flange for laser port. ....................................................................... 180 F.13 Drawing of side wall of laser port. ............................................................................. 181 F.14 Drawing of bottom wall for laser port. ...................................................................... 182 F.15 Drawing of top wall for laser port. ............................................................................ 183 F.16 Drawing of window mounting plate for laser port. ................................................... 184 LIST OF APPENDIX FIGURES (Continued) Figure Page F.17 Bracket for mounting the rotational platform for the prism to the laser port. ........ 185 F.18 Drawing of wafer holder. ........................................................................................... 186 F.19 Drawing of wafer clamp. ........................................................................................... 187 F.20 Drawing of arms used to support the high-speed camera. ....................................... 188 F.21 Drawing of high-speed camera mounting plate. ....................................................... 189 F.22 Drawing of high-speed camera lens support bracket. .............................................. 190 LIST OF APPENDIX TABLES Table Page D.1 Thermocouple uncertainty measurements and calibration curve constants. .......... 148 D.2 Uncertainty of applied heat flux due to uncertainties in heated surface area and applied power. .................................................................................................... 151 NOMENCLATURE ] acceleration [ ⁄ area [ ] drag coefficient specific heat (constant pressure) [ ⁄ ] bubble diameter [ ] bubble contact diameter [ ] distortion error [ ] force [ ] ] bubble departure frequency [ ] gravity (-9.81) [ ⁄ convective heat transfer coefficient [ ⁄ ] latent heat of vaporization [ ⁄ ] ] electrical current [ Jakob number ] thermal conductivity [ ⁄ length [ ] Marangoni number ⁄ ] momentum [ vector length [ ] heat flux [ ⁄ ] heat transfer rate [ ] bubble radius [ ] Reynolds number Stokes number direction of distortion gradient time [ ] temperature [ ] wall temperature [ ] pool temperature [ ] wall superheat [ ] log mean temperature difference [ ] pool subcooling [ ] ̇ uncertainty velocity [ ⁄ ] width [ ] electrical potential [ ] volumetric flow rate [ ⁄ ] Greek Symbols ratchet angle [ ] prism tilt angle [ ] laser beam deflection angle [ ] difference contact angle [ ] wavelength [ ] ⁄ ] dynamic viscosity [ density [ ⁄ ] ] surface tension [ ⁄ ] shear stress [ ⁄ prism angle [ ] resolved vector angle [ ] true vector angle [ ] internal bubble angle [ ] Subscripts buoyancy contact pressure drag bubble growth liquid Marangoni maximum root-mean-square saturation test section vapor LATERAL FLUID MOTION IN NUCLEATE BOILING THROUGH ASYMMETRIC SURFACE STRUCTURES 1. INTRODUCTION With advances in electronics towards smaller scales, the heat dissipation requirements per unit area are increasing dramatically. This large increase in heat flux requires ever more ingenious heat dissipation solutions. In the past this problem has been solved first by moving from natural convection to forced convection through the use of fans, followed by heat sinks and their associated development, then by single-phase liquid cooling in jet impingement, spray impingement or microchannel cooling configurations. For larger heat fluxes, there exists the possibility of implementing phase-change heat transfer, such as evaporation or boiling, in the cooling application. Depending on the operating surface temperatures, fluids with appropriate boiling point can be selected. The advantage of phase-change heat transfer is that rather than removing heat from the system by sensible heating of a fluid, the phase of the working fluid is converted from liquid to vapor thermodynamically, at a constant saturation temperature. In most cases, the amount of energy required to convert liquid to vapor is very high (for water at atmospheric pressure the heat of vaporization is 2257 ⁄ compared to a specific heat of 4.217 ⁄ [1]), thereby resulting in reduced inventory of fluid and smaller pumps for the same heat transfer rate compared with single-phase liquid cooling methods. Phase change heat transfer systems that include boiling can either consist of pool boiling or convective boiling systems. Pool boiling systems rely on a stagnant pool to dissipate the thermal energy; bubbles are generated at the liquid-solid interface and are transported to the liquid-vapor interface through buoyancy forces. Secondary motion in the liquid phase is induced by natural convection and the movement of bubbles. Convective boiling systems aim to increase the intensity of fluid motion by directing an inflow of the liquid phase across or onto the heated surface [2]. There are a variety of convective boiling systems, ranging from jet-impingement boiling where a liquid jet is directed onto the heated surface, to spray impingement boiling where a liquid spray is directed onto the heated surface, and microchannel boiling, where flow is directed through a heat sink with microscopic channels in the heated surface. 2 The underlying trend in these ever more intricate heat removal techniques is that although they become more effective, they also become more bulky, heavy, and complex to implement. Any sort of forced liquid convection system requires pumps, additional plumbing, and the associated instrumentation and control. The cost of these systems is often also a limiting factor. From a reliability and cost point of view, it is therefore desirable for there to exist heat removal solutions for high flux cooling that would contain no moving parts and would ideally be self-controlling. A significant advance in heat transfer was made when such a passive phase-change system was first discovered in the form of heat pipes [3]. A heat pipe consists of a sealed tube that is heated at one end and cooled at the other. Evaporation takes place at the hot end and the vapor travels to the cool end where it is condensed. The condensed liquid is then transported back to the hot end by capillary forces induced by a porous wicking liner in the inside walls of the tube. This system is highly effective as it requires no external power and does not require any moving parts, but is limited by the pressure drop in the wick for high heat fluxes. Other types of heat pipes are the looped heat pipe, and pulsating heat pipe [4]. The weight and complexity associated with convective heat dissipation solutions is even more problematic for space applications, where a simple and lightweight system is highly desirable in order to keep costs down. For this reason forced convection solutions are not ideal. For example, the pathfinder spacecraft featured a single-phase mechanically pumped cooling loop; the pump assembly alone weighed about 8 kg [5]. At the estimated launch cost per pound at that time this equates to an estimated launch cost of between $70,593 and $238,427 for the pump alone, depending on the configuration of the Delta II launch vehicle used [6]. Nevertheless, the high cost of forced convective systems has not limited their use. In terrestrial conditions, natural convection is supplied by gravity-induced buoyancy forces, created by differences in the medium density caused by local heating. The microgravity environment does not permit liquid cooling systems to rely on natural convection for adequate heat transfer as buoyancy forces are no longer significant. Thermal management systems that use boiling heat transfer are not currently used in microgravity systems either since bubble departure from the surface by buoyancy is greatly reduced. A puzzling problem 3 now exists as well-studied means of high heat flux heat transfer and simple natural convection are no longer practical in the microgravity environment. There consequently exists a need for a new technology that has the simplicity of passive systems such as heat pipes, and the heat flux capacity of two-phase forced convection systems. The work discussed in this thesis aims to generate a non-gravity induced net fluid momentum parallel to the heated surface solely by the application of heat during nucleate boiling. Figure 1.1 shows a schematic of the surface geometry studied. Figure 1.1: Cross-section of geometry proposed to impart a net momentum on the fluid parallel to the heated surface. Reentrant cavities serve to lower the nucleation temperature by maintaining a nucleation site and generate bubbles preferentially on one side of the ratchet pattern. The geometry studied is a 1 mm pitch ratchet pattern, with faces at angles of 30° and 60°, and a pyramidal reentrant cavity in each 30° angled face. Heat is applied from below by a thin-film heater and initiates nucleation inside the reentrant cavities, upon which the bubble grows, protrudes from the cavity, detaches from the surface and leaves the surface at an angle to the vertical. Small cavity sizes (on the order of 100μm) ensure small bubble departure diameters, subsequently resulting in high departure velocities. The use of reentrant cavities ensures consistent nucleation sites, reduced temperature overshoot for initiation of boiling when compared to polished surfaces, and an increase in the heat transfer coefficient by up to an order of magnitude as vapor remains trapped in the cavity after bubble departure, precluding the need to reach nucleation temperature for subsequent bubbles [1]. Additionally, when orienting these cavities preferentially in one direction, a net 4 flow is expected to develop during nucleate boiling. This type of thermally-driven flow would have great advantages for space applications as it would not require a pump to move the fluid. The goal of this thesis work is to perform a proof-of-concept study of this design. A significant portion of the effort entailed design and fabrication of an experimental facility that could be used to test the concept under different orientations and in a microgravity environment afforded by parabolic flight. The hypothesis that lateral motion could be induced was tested using high-speed image analysis of bubble motion including determination of bubble velocity, acceleration, and size of the individual bubbles departing from the surface. Additionally, a model is proposed that describes the driving mechanism of the induced flow over the structured surface. 5 2. LITERATURE REVIEW The research presented in this thesis pertains to pool boiling from a novel design of a heated surface with augmented surface geometry intended to generate a net fluid motion parallel to the surface. Such fluid motion could result in development of pumpless flow loops for terrestrial as well as space applications. Microgravity environments were of particular interest since the reduction of buoyancy-induced natural convection would imply higher component of fluid motion parallel to the surface. The literature review presented in this section is consistent with the scope of the thesis and examines the basics of pool boiling, microgravity pool boiling, pool boiling with augmented surfaces, and thermally actuated pumping. 2.1. The Pool Boiling Curve Boiling heat transfer is not only used for the purpose of removing heat from a surface, but also to convert liquid into vapor in power generation cycles. The widespread implementation of boiling heat transfer has generated a significant amount of research on the subject, leading to among other things the development of the pool boiling curve. A boiling curve is normally plotted as the variation of heat flux with wall superheat ( ) and provides a convenient illustration of the performance of any particular boiling surface. Good performance is considered to be high levels of heat flux at low wall superheat conditions (i.e. as the curve moves upward and to the left, the heat transfer performance is increased). Figure 2.1 shows a generic pool boiling curve as it applies to controlled wall superheat conditions. 6 Figure 2.1: Generic pool boiling curve. All major boiling regimes are shown (plot adapted from Incropera et al. [1]). First and foremost, it is important to distinguish between the different pool boiling regimes (characterized by the different ranges of wall superheat), as each is dominated by distinctly different mechanisms. The pool boiling curve is commonly broken down into four distinct regimes with characteristic behavior: free convection (up to point A in Fig. 2.1), nucleate boiling (line AC), transition boiling (line CD), and film boiling (point D and beyond). Incropera et al. [1] and Carey [8] provide a detailed description of each of these regimes. In the free convection regime, few or no bubbles form on the surface and depart at a relatively low frequency such that the flow over the surface, and thereby the heat transfer coefficient, is dominated by natural convection. The nucleate boiling regime is characterized by the continuous nucleation, growth, and departure of vapor bubbles from the heated surface. This regime can be further broken into two subregimes: the isolated bubble regime (line AB in Fig. 2.1), and the regime of columns and jets, known as the fully developed nucleate boiling regime (line BC in Fig. 2.1). In the isolated bubble regime, the departure of bubbles induces significant fluid motion near the heated surface, increasing the convection coefficient. This increase in convection coefficient allows for a greater heat transfer rate for 7 the same wall superheat . In the fully developed nucleate boiling regime, the widespread coalescence of bubbles near the surface inhibits fluid flow, subsequently reducing the convection coefficient (point B in Fig. 2.1). However, the increase in wall superheat maintains the trend of the increasing heat flux until the reduction in convective effects is balanced by the increasing wall superheat. The heat flux at this point is the maximum obtainable heat flux in the nucleate boiling regime. Because of the high heat flux and low required wall superheat associated with nucleate boiling, this is a desirable operating regime for most engineering applications. Transition boiling occurs when is increased beyond this maximum value. When this occurs, nucleation happens at such a high rate that bubble coalescence on the surface covers large regions of the heated surface with a vapor layer. Because of the relatively low thermal conductivity of vapor, this further reduces the heat flux. Increasing even further results in more of the surface being covered in vapor until the liquid no longer touches the surface and a stable vapor film forms. The temperature at which this occurs is called the Leidenfrost point (point D in Fig. 2.1), beyond which film boiling takes place. The dominant heat transfer mechanisms in film boiling are conduction through the vapor layer, and radiation from the heated surface to the liquid-vapor interface. When heat flux is the independent variable in the system (common for most experiments and characteristic of heat generation in electrical systems), the maximum heat transfer rate that occurs at the onset of transition boiling is called the critical heat flux (CHF), as any further increase in heat flux would result in a rapid increase in surface temperature, rapidly moving to the film boiling regime; this discontinuity can be shown by line EF in Fig. 2.2a – the pool boiling curve for water subject to increasing controlled heat flux. 8 (a) (b) Figure 2.2: Pool boiling curve for water under controlled heat flux conditions. Plots are shown for both during increasing heat flux (a) and decreasing heat flux (b) (plots adapted from Carey [8]). Likewise, reducing the heat flux during film boiling maintains the vapor film until reaching the Leidenfrost point, upon which the flow abruptly transitions to nucleate boiling (line GH in Fig. 2.2b). This transition is similarly associated with an abrupt reduction in wall superheat. Such a scenario could occur in quenching of metals for example. This behavior indicates that when controlling the heat flux, the surface temperature exhibits hysteresis. Hysteresis can also occur at the onset of nucleate boiling and is especially evident when the fluid is highly wetting on the surface and/or the surface is very smooth with no cavities or trapped vapor. For water on a smooth surface, a wall superheat as high as 17°C can be necessary to initiate nucleation [9]. When controlling heat flux, once nucleation occurs, the surface temperature abruptly decreases due to the increased heat transfer coefficient (line BC in Fig. 2.2a). At this point, if the heat flux were to be reduced, the temperature would follow a different path as nucleation has already taken place (line HA in Fig. 2.2b). 2.2. Forces on a Bubble Before discussing the dynamic behavior of bubbles in pool boiling, it is important to review the forces on them in a heated pool. It should be noted that three distinct phases exist for a bubble: growth, departure, and post-departure. Figure 2.3 shows the forces acting during 9 bubble growth on a surface. The forces acting are the buoyancy force between the bubble and the solid surface force induced by Marangoni flow , the surface tension , the contact pressure force , and the drag force due to bubble growth , the reaction . The forces acting on a bubble after departure are the buoyancy force, the reaction force induced by Marangoni flow, and the drag force caused by the motion of the bubble relative to the surrounding fluid . Each of these forces is explained in detail below. Figure 2.3: Forces on a vapor bubble attached to a heated surface. The sum of the forces dictates whether the bubble will depart from the surface or remain (diagram adapted from Zhang and Chao [10]). The most familiar force is the buoyancy force, a force induced by differences in hydrostatic pressure around the bubble, which normally causes a bubble to rise to the surface when subject to gravity. This force can be computed as the weight of the bubble less the weight of the displaced fluid: ( ) (2.1) Whenever a bubble is in contact with a solid surface, it is subject to surface tension forces that act on the bubble at the contact line, tangent to the bubble’s liquid-vapor interface 10 ( ) (2.2) Surface tension also causes the bubble’s internal pressure to be higher than the external pressure. This higher internal pressure is imparted on the un-wetted portion where the bubble is in contact with the solid surface, and is therefore called the contact pressure. The force due to the contact pressure is modeled using the Young-Laplace equation: (2.3) In a pool with a non-uniform temperature, Marangoni convection, an interfacial convective current set up through surface tension gradients, acts to push the bubble toward areas of lower surface tension (higher temperature) [10]. Briefly, at a liquid vapor interface, any surface temperature gradients cause a flow of liquid from regions of low surface tension to regions of high surface tension. In any subcooled pool boiling condition, the fluid near the heated surface is hotter than the pool and exhibits a lower surface tension than the fluid in the surrounding pool. In the presence of vapor bubbles these surface tension gradients generate a concentrated flow of liquid from the heated surface to the surrounding pool (Fig. 2.3). These surface tension-driven currents travel around the bubble, and create a force on the bubble towards the surface, effectively trapping the bubble on the surface. The local shear stresses at any angular location due to Marangoni flow on a spherical bubble can be modeled by the following equation as described by Wang et al. [11]: ( )( ) (2.4) When assuming a linear vertical temperature gradient, integrating this equation over the total surface area of the bubble gives ( )( ) (2.5) Derivation of Eq. 2.5 is provided in Appendix A. In terrestrial conditions, Marangoni convection has little effect on bubble departure for large bubbles as the large buoyancy 11 forces greatly mask such small effects; this can be shown by modeling the ratio of the force due to Marangoni convection to the buoyancy force: ( ) ( )( ) Assuming properties of water at saturation temperature ( [ ⁄ ], [ ⁄ (2.6) ⁄ [ ⁄ ], ]) and negligible vapor density, this ratio becomes ( ) (2.7) It becomes clear that low gravity, steep temperature gradients, or small bubble diameters are necessary for the Marangoni convection forces to become important. For example, in terrestrial conditions, with a bubble diameter of 10 mm and a temperature gradient of 2°C/mm, the ratio of Marangoni to buoyancy forces is -0.015, indicating the force due to Marangoni flow is two orders of magnitude lower than the buoyancy force. Wang et al. [11] observed that on a thin (25 or 100 µm) heated wire with bubble sizes smaller than 50 µm and subcooling greater than 30°C, strong liquid jets with velocities on the order of 100 mm/s were observed to emanate from the wire, occasionally reaching 600 mm/s. These jets were observed following the collapse of a larger bubble and the associated forces induced by these jets were strong enough to drive the bubble against the buoyancy force toward the wire. For this case, using Eq. 2.4, and the conditions presented by Wang et al. [11], the force due to Marangoni flow was computed to be 31 times greater than the buoyancy force. There is also a drag force present whenever the bubble is in motion relative to the surrounding liquid. This occurs both when moving through a pool, and growing on the surface. To determine this force, the inviscid model is used as the vapor viscosity is much lower than the liquid viscosity, rendering the no-slip boundary condition invalid. For a bubble moving through a pool, the drag force is: (2.8) 12 which is the equation for drag on a sphere. For a bubble growing on a surface, Zeng et al [12] described a net force that was imparted on the fluid (Fig. 2.4). The reaction is a downward force on the bubble that can be modeled as the drag the bubble experiences moving at a velocity equal to the growth rate of the diameter Figure 2.4: Force exerted on a bubble by the surrounding liquid as a result of bubble growth. This force can be characterized as a drag force, referencing the diameter growth rate as the bubble velocity. ( ) (2.9) which is merely Eq. 2.8 with the exception that the velocity has been replaced with the growth rate of the diameter. This is a very basic form of the model; a number of other correlations exist for this growth rate that account for the presence of a wall and the hemispherical shape a bubble traditionally has during the initial (inertially controlled) growth phase on a smooth surface. 2.3. Pool Boiling in Microgravity The pool boiling curve described in Section 2.1 applies only to terrestrial conditions where gravity serves to remove vapor from the surface primarily though buoyancy forces. The complication that arises when performing pool boiling in microgravity is that once a bubble nucleates and grows in size, the near absence of a buoyancy force impedes the bubble’s 13 ability to leave the surface. Fortunately, there have been numerous experiments in the field of microgravity pool boiling, both under saturated and subcooled conditions. Most commonly experiments were aimed at characterizing the behavior and dominant mechanisms of two-phase flows in a microgravity environment. Such studies include determination of the heat transfer coefficient, critical heat flux, bubble formation and growth, and bubble coalescence. Lee et al. [13] performed experiments with R-113 on a number of space shuttle flights and observed that since buoyancy was no longer the driving force for bubble behavior in microgravity, bubbles tended to remain on the surface, growing ever larger in size by coalescing with nearby bubbles, leading in turn to greater surface dry out and a faster onset of critical heat flux. Once bubbles grew sufficiently in size and coalesced, a single dominant vapor bubble remained and was lifted just off the surface. This behavior was attributed to the rapid evaporation of the thin liquid layer remaining after the coalescence of a large number of small bubbles; the added momentum away from the surface was strong enough to drive it off the surface. This hypothesis was supported by an observed rapid decrease in surface temperature, consistent with rapid evaporation. The large bubble was subsequently kept from the surface by the continued addition of momentum from the small bubbles as they grew towards and coalesced with the large bubble. This continued coalescence was observed at steady state, and confirmed that there is a clear nucleate boiling regime in microgravity conditions. What was even more surprising was that despite the greatly reduced bubble departure frequency, during low subcooling and low heat fluxes, several studies observed increase in the heat transfer coefficient in microgravity over terrestrial gravity [13-18]. In fact, experiments performed with R-113 refrigerant showed a 32% increase in the heat transfer coefficient. This increase in the heat transfer coefficient was attributed to the large vapor bubble just off the surface, which acted as a large reservoir and absorbed the nucleating bubbles through coalescence before they would depart naturally, inhibiting dryout. Additionally, Lee et al. [13] postulated that the continuous process of nucleation and coalescence induced turbulent eddies that enhanced the heat transfer coefficient. These 14 effects have since been generally accepted as the reason for the enhanced heat transfer coefficient in low subcooling conditions in microgravity over terrestrial gravity. Under high subcooling conditions (greater than 22.2°C for R-113), no such large vapor bubbles were observed, and the heat transfer rates were attributed solely to the turbulence caused by the erratic motion, coalescence, and departure of bubbles. The high heat transfer coefficient in high subcooling conditions in microgravity compared with terrestrial conditions has also been suggested to be caused by Marangoni convection around the vapor bubbles [18]. Based on the experiments performed with R-113, Lee at al. [13] developed a microgravity pool boiling curve and compared it to a terrestrial gravity pool boiling curve (Fig. 2.5). The increase in heat transfer coefficient for low heat fluxes in the nucleate boiling regime can be seen by the microgravity boiling curve’s shift to the left compared to the equivalent pool boiling curve for R-113 in terrestrial gravity. Additionally, for the microgravity condition, a significant reduction in the critical heat flux is clearly visible. Figure 2.5: The pool boiling curve in microgravity. Microgravity pool boiling studies using R113 were performed on a number of space shuttle flights in order to generate this curve (plot was adapted from data presented by Lee at al. [13]). 2.4. Pool boiling using augmented surface geometries Past research on passive heat transfer enhancement has been performed predominantly by means of augmented surface geometry. Such geometric features include continuous slots 15 and reentrant tunnels, cavities, angular/wedge-shaped geometries, and porous surfaces [1, 19-22]. The improved heat transfer characteristics of these augmented surfaces have been well documented, and in some cases result in heat transfer coefficients more than double that which are observed on smooth planar surfaces. Modifications to surface geometry on the order of 1 mm such as slots, wedges, and reentrant tunnels are created to act as favorable sites for nucleation and vapor entrainment, reducing the required wall superheat temperatures required to maintain nucleate boiling. Chyu and Fei [21] studied the effect of wedge angles on the heat flux during nucleate boiling by varying the contact angle of a solid wall with the heated surface (Fig. 2.6). It was observed that decreasing the contact angle allowed for the formation of a stable vapor phase at the contact line, and subsequently allowed for higher heat transfer rates for a given wall superheat over that of a plain surface. The greatest enhancement was observed for a wall contact angle of 15°, where heat transfer rate was over twice as high as for a plain surface for a wall superheat of about 2.5°C. Figure 2.6: Two-dimensional representation of the experimental setup used by Chyu and Fei [21]. This setup was used to study the effect of wedge angle on heat flux (diagram adapted from Chyu and Fei [21]). Das et al. [19,20] studied the effects of continuous slots in heated surfaces on the boiling heat transfer coefficient. The types of slots studied were rectangular slots with either a circular reentrant geometry, rectangular reentrant geometry, or no reentrant geometry at their base (Fig. 2.7). The effect of slot tilt and orthogonal patterning (a grid of slots) was also studied. 16 Figure 2.7: Various slot geometries studied by Das et al. [19,20]. Reentrant, non-reentrant, and angled slots were studies. Slot grids were also created using these geometries, creating rectangular pillars on the surface (diagram adapted from Das et al. [19,20]). All slots were created using a wire EDM technique and were 0.4 mm wide, 2 mm deep and spaced 3 mm apart. The results from this study reveal that significant enhancement can be achieved by use of such geometry. Enhancement factors as high as 12 over a planar surface were observed for the grid-style slot arrangement with circular reentrant geometry at the base, keeping in mind that when accounting for the increased surface area of the slots, the wetted surface area was increased by a factor of 3.65. Based on these results, follow-on studies with rectangular slots, and rectangular slots with circular reentrant geometry at the base were performed. The slot angle to the surface was varied, revealing that this too increased the heat transfer coefficient. Again the slots with circular reentrant geometry greatly surpassed the plain slots in performance. For both geometries, a maximum heat transfer coefficient was observed for all heat fluxes when the slot was tilted 45° to the surface. 2.4.1. Surface enhancements for fluid motion While the surface modifications in the previous section were aimed at heat transfer enhancement, this section discusses surface enhancements for fluid motion. The first of these enhancements discussed are wicking structures, designed to facilitate the advection of fluid from the pool to the surface via capillary action. Liter and Kaviany [22] studied the effects of porous coatings with a periodic variation in thickness. The aim of this study was to periodically facilitate the advection of liquid to the heated surface by means of capillary wicking, and vapor away from the heated surface along predefined paths, reducing the flow 17 resistance. Such systems are referred to as capillary-artery evaporator systems. The structure studied was comprised of copper beads 200 µm in diameter, sintered to form conical structures arranged in a close-packed hexagonal pattern. This arrangement greatly increased the heat transfer rate over a plain surface for the same degree of wall superheat. In fact, the critical heat flux achieved with this spatially modulated structured surface was over three times higher than that of a plain surface, and 58% higher than a uniform thickness porous layer coating. A particular case of fluid motion by surface enhancements has been recently demonstrated in single phase and film boiling regimes [23-26]. All three studies employed a similarly structured ratchet-like surface as discussed in this thesis, with the exception of the absence of any cavities. Additionally, the mechanisms by which the fluid motion was hypothesized to occur differ greatly between these studies and the work discussed in this thesis. The single-phase study was performed by Stroock et al. [23] and aimed at characterizing the net flow in a thin layer of oil with a free surface exposed to air by taking advantage of the natural presence of Marangoni-Bérnard convection cells. These convection cells are formed due to non-uniform temperature gradients at the liquid-air interface. Hot regions exhibit lower surface tension that cooler regions, driving flow near the surface towards the cooler regions. Where possible, this effect is further amplified by the up-welling of hot liquid under the hot surface regions, and down-welling of cold liquid under the cold surface regions. This thermo-capillary positive feedback effect leads to the formation of stable convective cells. It was observed that in the presence of a surface of asymmetrical topography (grooves with a steep slope on one side and shallow slope on the other) the primary convective cells did not remain entirely intact; a component of the flow moved to the next cell at either the bottom or top of the cell. This movement was not symmetrical as it occurred preferentially in one direction depending on the depth of the liquid layer and the surface temperature gradients. At a fluid depth half that of the topographical period , the convective cells matched the topographical period; the flow was in the direction of the steeply-sloped face at low temperature gradients, and in the direction of the shallow-sloped face at high temperature gradients (Fig. 2.8). At a fluid depth that corresponded to the topographical period, the 18 convective cell period was double that of the topographical period; the net flow at this depth was in the direction of the steeply-sloped face at all temperature gradients. In both cases, the amplitude of the net flow increased rapidly at conditions above the critical Marangoni number (a condition which dictates at which vertical temperature gradient the dominant form of heat transfer moves from conduction to convection). (a) (b) Figure 2.8: Experimental results from Stroock et al. [23]. Diagram shows hypothetical Marangoni-Bénard convective cells and a secondary flow pattern over a surface with asymmetric topography at high temperature gradients (a) and associated experimental results (b) (diagram and plot adapted from Stroock et al. [23]). These results were later replicated in a similar, but entirely separate study performed by Jo at Oregon State University using a closed loop experimental facility [24]. Both studies demonstrated small flow rates; the maximum liquid-air interface velocity observed by Jo during experiments was 0.85 mm/min. Even so, the ability to generate transverse flow merely by applying a heat flux was clearly demonstrated. Linke et al. [25] conducted a study on the thermally actuated pumping of liquids on surfaces above the Leidenfrost point in the film boiling regime (Fig. 2.1). Water does not contact the heated surface in the film boiling regime, and often moves around erratically depending on the smoothness of the surface. These characteristics were take advantage of by creating an asymmetrically structured surface (period of 1.5 mm) and heating it above the Leidenfrost 19 point. What was observed was that when liquid droplets were deposited on the heated surface they would consistently accelerate in the direction of the shallow facing slopes. Figure 2.9 shows the structured surface with a droplet of film-boiling water. At point A the droplet contacts the crest of the ratchet and vapor escapes to the left and the right of this point. The vapor escaping to the left was expected to escape to the sides of the ratchet (into the page and out of the page), whereas the vapor escaping to the right was expected to enact some viscous drag on the droplet to the right before escaping to the sides in the trough of the ratchet pattern. This net viscous drag was hypothesized to be the driving force for the droplet acceleration, and even propelled droplets up inclines. Figure 2.9: Leidenfrost effect on asymmetrically structures heated surface as demonstrated by Linke et al. [25] The direction of vapor transport between droplet and ratchets is shown (diagram adapted from Linke et al. [25]). This study revealed that significantly high droplet velocities could be achieved with this geometry. In fact, speeds on the order of 5 cm/sec were achieved during experiments with R134a refrigerant. A Follow-on study on this phenomenon was performed by Ok et al. [26] with water, and was primarily concerned with the effect of ratchet size on droplet velocity. The smallest ratchet period studied was 800 nm, and resulted in a maximum measured mean velocity of 40 cm/sec at a surface temperature of roughly 240°C. Maximum mean droplet velocities decreased with increase in ratchet period. As the wall superheat was increased the droplet speed decreased, and the all period-specific curves collapsed onto one. This perioddependent behavior at lower wall superheat was explained by the contact the droplet made with the top of the ratchets, increasing the heat transfer rate and splitting the vapor layer over each ratchet in two. The shorter the ratchet period, the more such contact lines existed 20 under the droplet to generate vapor and the greater the net viscous drag on the droplet. The collapse of the individual curves at high wall superheat was explained as follows: as the wall superheat increases, the droplet is levitated off the surface, and the flow between the two sides is less distinct. Larger ratchet periods provide a larger gap below the droplet for the vapor to escape, whereas smaller ratchet periods create a larger flow resistance for vapor escape, as the cross sectional area of the triangular channel is much less. The greater viscous drag on the vapor creates a thicker equilibrium vapor layer, offsetting the performance gain due to a small ratchet period, and making the behavior similar for all ratchet periods. 2.5. Conclusions on Literature Review The above literature review covers a broad range of previous work in the field of pool boiling using structured surfaces both in terrestrial and microgravity conditions, and serves to put the work discussed in this thesis into context. This review has revealed that studies relating to pool boiling heat transfer are mostly concerned with heat transfer enhancement without regard for lateral fluid motion or passive pumping effects. Some studies have been conducted on the passive pumping effects of structured surfaces by application of heat, specifically in the single phase natural convection regime, and the two-phase film boiling regime, but a gap exists in the nucleate boiling regime of the boiling curve where such fluid motion has been demonstrated, highlighting a need for thermally actuated pumping research in in the nucleate boiling regime. It is also important to note that much of the research surrounding pool boiling in microgravity was centered around characterizing the performance of a flat heated surface in the nucleate boiling regime, and that no studies were found in which the advantages of structured surfaces were discussed as they pertain to microgravity applications, nor were such experiments conducted. Additionally, some of the dominant pool boiling effects in microgravity such as Marangoni convection in subcooled conditions, and the presence of large vapor bubbles in saturated conditions, highlight the need for effective bubble removal from the heated surface to delay the onset of critical heat flux, allowing for greater heat fluxes at low surface temperatures. 21 3. SCOPE AND OBJECTIVES A review of the literature in Chapter 2 has revealed thermally actuated pumping in the nucleate boiling regime has not been studied, nor has there been research into the effects of such surfaces in microgravity. Because of the high heat fluxes that are possible with phase change heat transfer, thermally actuated pumping of liquids in the nucleate boiling regime has the potential to offer great benefits in the form of a passive high flux thermal management device. Thermally actuated pumping has been demonstrated with an imposed vertical temperature gradient in a single-phase liquid regime in the presence of a liquidvapor interface by Stroock et al. [23] and in the Leidenfrost film boiling regime by Linke et al. [25]; It is therefore of great benefit to research possible methods of doing so in the nucleate boiling regime. Both experiments demonstrated a net pumping effect using asymmetric ratchet-type surface structures, and both were able to drive fluid in the same direction (i.e. in the direction of the shallow-sloped face). The work discussed in this thesis will focus on the same type of repeated asymmetric ratchet surface geometry, such that a single type of surface structure can potentially provide thermally actuated pumping in the same direction in the single-phase, nucleate boiling and Leidenfrost regimes. 3.1. Objectives and Tasks A multi-year collaborative study between Oregon State University and Auburn University is investigating the potential for thermally activated pumping of fluids in the nucleate boiling regime using repeated asymmetric surface structures. The experimental and modeling effort at Oregon State University will be aimed at documenting the bubble dynamics and flow around a small array of such ratchets in a pool of stagnant fluid and quantify forces that cause fluid motion in a direction parallel to the heated surface. The effort at Auburn is devoted to silicon fabrication methods for the surfaces as well as to characterize the net flow of liquid in a closed loop with an evaporator comprised of the ratcheted surfaces. As a part of the larger effort described above, the objective of this thesis work is to carry out proof-of-concept experiments to test the hypothesis that bubbles emanating from cavities 22 located on an asymmetrically structured surface have a component of velocity parallel to the heated surface as described in Chapter 1. A positive indication that a net lateral flow is generated by the structured surface would justify future work in this area and would be the first step in evaluating the potential for thermally actuated pumping using asymmetrically structured surface geometries similar to those employed by Stroock et al. [23] and Linke et al. [25]. While asymmetry is not necessary for the purpose of proving the hypothesis, it is nevertheless implemented to maintain a surface geometry consistent with that employed by Stroock et al. [23] and Linke et al. [25] such that a single surface geometry can generate lateral fluid motion in both the nucleate and film boiling regimes. In order to validate the hypothesis, information on bubble velocity, acceleration, departure diameter, and volume needs to be obtained. High-speed visualization with backlighting provides for both qualitative and quantitative visualization of the bubble motion and is hence the method of choice for the experiments presented in this thesis. In order to carry out the above proof-of-concept experiments, a major task entails design and construction of an experimental facility. The facility design also needs to accommodate a future study of the potential of the passive geometry for thermally-actuated pumping in a microgravity environment. These future experiments on gravitational dependence of the flow are expected to take place with three different orientations of the heated surface to quantify the bubble and liquid motion with respect to the buoyancy force, as any flow perpendicular to or in the opposite direction of the buoyancy force would indicate that buoyancy is not the driving mechanism of the flow. For this reason, the surface must be capable of being installed in the pool in three orientations as indicated in Fig. 4.1. Additional requirements were that the temperature of the liquid-surface interface could be mapped using infrared thermography, and that Particle Image Velocimetry (PIV) and Laser Induced Fluorescence (LIF) measurements could be made to study the two-dimensional flow and temperature variations in the liquid near the heated surface. 23 4. EXPERIMENTAL FACILITY This section covers the design of the experimental facility. First a review covering various methods of creating a microgravity environment is presented, followed by a brief review of such previously designed facilities. A description of the test section, the experimental facility requirements, the various designs considered for this thesis, and ultimately a detailed description of the final design, including all associated instrumentation and hardware is presented next. Although the full functionality of this experimental facility was not used to obtain the results presented in this thesis, it was nevertheless implemented to set the stage for follow-up work. Part drawings for all manufactured parts are included in Appendix F. 4.1. Existing Microgravity Simulation Methods and Facilities Researching new technologies for space applications ideally requires validation in space. However, since the cost of transporting experiments to space in prohibitively expensive, it is desirable to simulate or create an artificial microgravity environment where experiments can be conducted as a reasonable simulation of the space environment [28]. For this reason a review of such existing methods was carried out, along with test facilities used for such experiments. 4.1.1. Simulating a Microgravity Environment The primary difference between gravity and microgravity conditions is the near absence of buoyancy forces in microgravity. Because the buoyancy force acts in the vertical direction alone, it is still possible to simulate microgravity conditions by studying only the convective behavior normal to or opposing the direction of the buoyancy force (Fig. 4.1). For example, in terrestrial conditions, if naturally occurring convective motion was observed to transport hot liquid laterally or downward in a cold pool, such an observation would indicate buoyancy was not the driving mechanism for convection. For this reason, among others, researchers sometimes employ vertical or downward-facing heated surfaces to study the flow effects when buoyancy does not aid bubble departure [29,30]. Results from such experiments may then justify further experimentation in microgravity conditions. 24 Figure 4.1: Three orientations required to effectively demonstrate the flow's nongravitational dependence. 4.1.2. Creating a Microgravity Environment The need for a non-space-based microgravity environment has led to the development of several types of microgravity simulation facilities. There are three primary means in which a microgravity environment can temporarily be created, these are: drop towers, sounding rockets, and parabolic flights. There are advantages to each of these services in the form of acceleration expected, duration of the microgravity conditions, and various others. Table 4.1 outlines the various parameters associated with each service. 25 Table 4.1 Overview of various methods of creating a microgravity environment and common associated parameters [31-35]. Service Type Drop Tower Sounding Rocket Parabolic Flight Min g 1x10-5 1x10-5 Max g 30-65 N/A 2x10-2 9 Duration Advantages 2-5 sec Very repeatable Several min Experiment is actually brought into space 10-20 sec Operator can accompany experiment As each facility/method has its own advantages, the desired facility/method should be chosen based on the experimental requirements. Drop Tower Drop tower facilities usually consist of a large tower, at the top of which a drop vehicle is suspended. The experiment is housed inside this vehicle and experiences very little acceleration when released from its suspended position. In order to minimize the accelerations associated with aerodynamic drag, some facilities implement either a secondary aerodynamic fairing within which the experiment floats freely, or create a near complete (0.005 Torr) vacuum in the chamber in which the vehicle falls [31,32]. Facilities that implement these features are capable of delivering accelerations as little as 1x10 -3g for the aerodynamic fairing type and 1x10-5g for the vacuum chamber type. The primary disadvantage of a drop tower is the high acceleration upon impact with the stopping device; it is not uncommon for drop towers to subject payloads to impact accelerations of 30-65g [31,32]. Sounding Rocket For longer and more accurate microgravity simulations, the sounding rocket is often used. Sounding rockets can house numerous experiments and have a vertical launch and return trajectory. The microgravity conditions at the apex of the trajectory are often of very high quality. The primary advantage to this service is that the payload is actually brought into space, which allows experiments to be conducted that require a true space environment in addition to microgravity. In some cases, sounding rockets achieve altitudes over 1,500 km (higher than the international space station) before returning to ground level [33]. Because 26 sounding rockets can travel to such high altitudes, they are free of aerodynamic drag and are thereby capable of providing microgravity conditions with accelerations commonly as low as 1x10-5g for several minutes; at least one study reported continuous accelerations as low as 10-6g [16]. The disadvantages of sounding rockets are the payload size restrictions, inaccessibility to the experiment, and the possibility that the experiment is not recovered after the flight. Flying Parabolic Arcs The most familiar means of simulating microgravity is flying parabolic arcs, where an aircraft flies a parabolic trajectory to match the acceleration of gravity. There are numerous federal agencies such as NASA and ESA, and commercial organizations such as Zero Gravity Corporation that provide these services. The primary advantage of these aircraft-based microgravity simulations is the number of repeated parabolas that can be performed (up to 40 per flight), the allowance for people to accompany the experiment, the absence of any large accelerations, and the availability of external power sources [37]. Experiments are normally subject to aircraft vibrations, but can often be free-floated to physically disconnect the experiment from the airframe (a technique that makes the airframe analogous to the aerodynamic fairing employed in a drop tower) to reduce accelerations below those experienced by the airframe. 4.1.3. Microgravity Experimental Facilities There have been a number of pool boiling studies performed in microgravity. Perhaps the most successful and widely cited microgravity pool boiling experiments are by Lee et al. [13] and are therefore the focus of this review. Because the aim of these experiments was largely the observation of bubble behavior as it pertains to the different regimes in the pool boiling curve, obvious similarities exist compared to the needs for the experimental facility developed for this thesis work. The experimental facility employed by Lee et al. [13] was a pressurized chamber, with two compartments; one compartment housed the boiling surface and the R-113 fluid, the other served as a reservoir to accommodate expansion associated with the generation of vapor bubbles in the pool and was filled with nitrogen. The two 27 chambers interfaced by means of a bellows, allowing for expansion into the nitrogen chamber without increase in pressure. A pressure transducer in the nitrogen chamber monitored the pressure, and regulated the flow of nitrogen from a storage tank into the chamber when the pressure was too low, and vented nitrogen if the pressure was too high. Such a pressure regulating configuration was also used by Straub [38]. The pool was heated through the chamber walls, and a stirrer in the pool served to create a uniform pool temperature at the start of each experiment. Perhaps the most unique feature of this experimental facility was the ability to image the pool from the side and from below the heater surface at the same time using a single camera. The bottom view was used to count the number of bubbles generated as well as to determine their size, whereas the side-view was used to observe events occurring in the pool above the heated surface. The ability to view the pool from below was accomplished by sputter depositing a thin (400 Å) gold layer that served as a semitransparent heater as well as resistive thermometer onto a polished transparent quartz substrate. A number of thermistors were placed at various distances from the heater surface as well as throughout the pool. R-113 was used for its low boiling temperature, thus minimizing heat losses to the environment, and its electrical nonconductivity, allowing it to be used in direct contact with the gold film heater. Because this experiment was used in a microgravity environment it did not require the heated surface to be installed in more than one orientation. For the purposes of the present experimental facility design, the primary considerations taken from the experimental facility employed by Lee et al. was to make accommodations for future pressure regulation equipment. Experiments in both microgravity and simulated microgravity can be performed using a variety of resources and techniques. This review has revealed that for the research discussed in this thesis, it would be most appropriate to initially research the effects of various surface orientations, followed by flying parabolic flight in an aircraft, primarily because an aircraft allows the operator to accompany the experiment, and does not subject the experiment to high accelerations. 28 4.2. Test Section The structured surface was fabricated by Dr. Sushil Bhavnani and Naveenan Thiagarajan at Auburn University in Auburn, AL and consisted of two wafers bonded to one another – the structured surface and the heater wafer. The heater wafer consisted of a 500 µm thick, 76.2 mm (3.00 in) diameter silicon wafer, etched from a larger 100 mm diameter wafer. A small section (11.8 x 8.0 mm) of the structured surface with seven ratchets and four cavities per face was bonded to one side of the large wafer, and a thin film aluminum heater was deposited on the other. From here on in this thesis the side of the silicon wafer with the heater is referred to as the backside, the side with the structured surface is referred to as the topside, and the asymmetrically structured surface is referred to as the test section. The aluminum heater was deposited through e-beam evaporation, after which thermal isolation trenches were etched 350 µm deep around the heater to reduce conduction losses in the wafer. The test section was made from a separate silicon wafer and the ratchet pattern was created using Deep Reactive Ion Etching (DRIE). The angles of the pattern were controlled by varying the plasma gas ratios during this process, and were nominally etched to 24° for the test section used in this thesis work. The cavities were etched from the opposite side of the test section using potassium hydroxide. This resulted in an isotropic etch of the silicon at an angle of 54.6°, creating pyramidal cavities. Once the test section was completed, it was bonded to the topside of the wafer using a gold and tin preform as solder (Fig. 4.2). 29 Figure 4.2: Configuration of the test section and thin film aluminum heater silicon wafer. The test setion was etched from a separate silicon wafer and bonded with gold and tin. The thin film heater was deposited through e-beam evaporation. The cavity mouths in the sloped ratchet face were trapezoidal in shape due to the pyramidal etch from the back. Using a 25 mm x 25 mm fixed frequency grid distortion target with dots of 0.0625 mm diameter and 0.125 mm spacing (Edmund Optics stock no. NT58-509), the cavity mouth was estimated to be 250 µm at the base, 120 µm at the top, and 205 µm tall after correcting for the 24° slope of the face (Fig. 4.3). An image of the optical grid taken at the same working distance and magnification as the cavity image was overlaid to provide a scale, as in-situ placement of the optical grid did not permit both the cavity and grid to be in focus simultaneously due to the topography of the test section and the narrow focal depth of the microscope lens. 30 Figure 4.3: Microscope image of a cavity on the test section with overlaid image of calibrated optical grid. Power was supplied to the test section by a variable power supply (Tenma 72-8350). Two multimeters (Tektronix DMM912) were used to measure the supplied current and the voltage across the heater. Figure 4.4 shows a schematic of the electrical circuit used to power the test section and measure the voltage and current. Figure 4.4: Schematic of test section power and measurement circuit. Multimeters were used to measure the supplied current and the voltage across the measurement leads. 4.3. Experimental Facility Requirements The experimental facility was designed to study the effects of two-phase microgravity pool boiling through minimally-intrusive whole-field measurements. The silicon wafer was to be mounted in the three aforementioned orientations in such a way as to allow the 31 simultaneous imaging of the ratchet-fluid interface through infrared thermography from the backside of the wafer, high-speed imaging of the bubbles departure dynamics from a side-on view, and facilitate future implementation of Particle Image Velocimetry (PIV) and Laser Induced Fluorescence (LIF) measurements (also from a side-on view). Additionally, the pool temperature would need to be controlled to permit saturated or subcooled experiments, and there would need to be provisions for condensation of vapor. The chamber was to be constructed out of 316 Stainless Steel as this would insure compatibility with most fluids, prevent oxidation, and insure a long operational life. Because the desired method of simulating microgravity was flying parabolic arcs, the entire experimental facility was to be made compatible with NASA Document AOD-33897 [39]. 4.4. Initial Chamber Design The primary design challenge for the chamber was the triple orientation requirement for the test section. The first design considered was to mount the wafer in the chamber and allow the chamber and all associated cameras and instruments to be rotated as one assembly to provide the desired orientations. Table 4.2 lists the advantages and disadvantages of this design. 32 Table 4.2: Advantages and disadvantages of achieving the three-orientation capability by means of a rotatable chamber. Advantages of Rotatable Chamber Disadvantages of Rotatable Chamber Pool temperature and power input The ability to rotate the entire conditions could remain more consistent experimental facility requires a lot of between the various orientations. additional hardware and design effort Little time is required to change the wafer’s orientation as the chamber can be leading to increased cost. The degree of freedom about the axis of rotated, precluding a need to remove and rotation introduces the possibility of errors reinstall the wafer for the various in orientation repeatability and makes the orientations, greatly simplifying this part of chamber more susceptible to external the experimental procedure. vibrations and forces. Allows for off-90° changes in the wafer’s orientation if this ever becomes necessary. The externally-mounted laser will require a complicated mirror system to maintain accurate and repeatable alignment with the target for all orientations, increasing the cost and complexity. Size envelope of experimental facility is large Though a rotatable chamber has great benefits from an experimental procedure point of view, the cost of manufacturing and complexity of the optics ultimately resulted in the decision not to follow through with this design. Instead, it was decided to keep the chamber in a fixed orientation, and change the wafer’s orientation alone, greatly simplifying the overall design. 4.4.1. Initial Pool Temperature Control The pool was initially heated using a hot oil loop; it consisted of a 3 m (10 ft.) long 316 stainless steel tube through which hot oil was pumped. The hot oil was pumped from a 33 remotely-located circulation heater (Cole Parmer Polystat Series) which was capable of controlling the oil temperature. Unfortunately this configuration not only lacked temperature feedback for to control pool temperature, it was not capable of raising the pool temperature above 40°C, largely due to the number of flow restrictions in the flow loop which greatly reduced the flow rate. 4.5. Final Chamber Design Because the fixed chamber design was adopted, the focus was on how best to provide the test section with the capability of being mounted in the three orientations of interest with minimal cost and effort. Considering the wafer’s fragility and high manufacturing cost and procurement time, it was not favorable to require dismounting of the wafer itself when changing orientations, but rather to create a wafer holder upon which the wafer could be affixed, which itself could then be reoriented. Such a wafer holder would have to support the wafer at its perimeter, keeping the central area on the backside of the wafer exposed to the outside environment to permit IR thermography. By creating three identical circular ports in the chamber walls (bottom, side, top), the wafer holder could be placed in any one of the ports, providing the three-orientation capability. 4.5.1. Wafer Holder In addition to interfacing with the chamber, the wafer holder was designed to hold the silicon wafer while providing for IR access from the backside and to provide electrical connections for the power supply and for voltage measurements. Four electrical connections were needed in total – two for supplying power and two for measuring voltage. Since the backside of the wafer is exposed, the holder must also provide a seal around the wafer. The O-ring was of round cross section, 1.59 mm (0.063 in) thick, and made of FC-72 compatible EPDM (Ethylene Propylene Diene Monomer).The initial design featured multiple clamps that clamped the wafer to the O-ring (Fig. 4.5a). The purpose of this design was to provide a clear view of the test section between the clamps when viewed from the side. A number of clamp tests were performed with sample wafers, but the individual clamps did not provide uniform 34 clamping force and caused numerous failures of sample wafers. It was discovered that in order to prevent failures, the requisite clamping force on the wafer needed to be uniformly distributed around the circumference of the O-ring. However, supporting the wafer continuously around its circumference over the O-ring would obscure the side-on view of the test section. To solve this problem, a 3-piece clamp was designed (Fig. 4.5b). The sides of the clamp were made of 12.70 mm (0.500 in) thick optically clear polycarbonate (the inner face of which was located 25.4 mm (1.00 in) from the test section centerline), while the rest of the clamp was made of Polyetheremide (a translucent brown thermoplastic also known as Ultem1000). Six screws secured the clamp to the wafer holder, sandwiching the wafer and the O-ring in between. This design provided a continuous flat surface that pressed down on the wafer, and also served to support the wafer where the pogo pins made contact, precluding stress concentrations at these locations. Lastly, a removable top wall was added 25.4 mm (1.00 in) above the wafer to reduce the momentum effects of any currents in the surrounding pool. This clamp design proved highly effective, providing a circumferentially uniform clamping surface while providing an unobstructed sideon view of the ratchets. (a) (b) Figure 4.5: Wafer holder and clamp designs. The low-profile individual clamps on the initial design caused stress concentrations that lead to failures in sample wafers (a). The new design (b) was a continuously supporting clamp where part of the clamp was made of optically clear polycarbonate to provide an unobstructed side view of the test section. 35 The holder was designed to bring the wafer into view through the chamber windows, and provide for an unobstructed view of the backside of the wafer for infrared thermography (Fig. 4.6). The working distance for the IR microscope lens was 30 mm so the pogo pins and lead wires were kept short enough to maintain clearance in this small gap. The bottom of the holder featured a flange with a hole pattern to mate with the round chamber ports in any of the three aforementioned orientations. Figure 4.6: Transparent view of the wafer holder showing the infrared camera microscope lens position in relation to the test section. A cutout in the polycarbonate wafer mount allows the microscope lens to be spaced 30 mm to focus from the backside of the wafer, permitting infrared thermography of the heated surface. 4.5.2. Chamber Design The 316 stainless steel chamber featured a wall thickness of 12.7 mm (0.500 in) in order to allow enough depth for screw threads and O-ring grooves, and inside dimensions 22.8 cm x 22.8 cm x 15.2 cm (9.00 in x 9.00 in x 6.00 in). All chamber O-rings were 3.18 mm (0.125 in) thick with a round cross-section. The material chosen for all O-rings was EPDM as it offered good chemical compatibility with 3M FluorinertTM Electronic Liquid FC-72 (Table 4.3). All Oring grooves were 3.56 mm (0.140 in) wide and 2.84 mm (0.112 in) deep, allowing for 10% 36 compression. The circumference of each O-ring groove was sized to induce 2-4% stretch when installed. Table 4.3: Material compatibility with 3M FluorinertTM Electronic Liquid (FC-72) Material Buna-N PTFE Viton EPDM Silicone Thermoplastics (PVC, Ultem, Polycarbonate, Acrylic, etc) PFA Compatibility with FC-72 Poor Good Poor Good Not Recommended Good Good Because the test section was to be imaged in three different orientations, it needed to be mounted in such a way as to keep it in view for external visible spectrum cameras (for PIV, LIF, and High-Speed Imaging) that were to image the flow near the ratchets, for this reason large windows were used. Additionally, the windows were chosen to be rectangular, precluding any cropping of the image by the edge of the window for a large field of view. The windows were made of 6.35 mm (0.250 in) thick borosilicate glass from GrayGlass and sealed against the chamber with a 3.18 mm (0.125 in) thick EPDM O-ring, clamped with a stainless steel flange. The flange was polished smooth to prevent the glass from cracking. The wafer mount ports were designed as circular cutouts because the wafer itself was round. This allowed the wafer holder to be an axis-symmetric part that could be machined on a lathe. Two 6.35 mm (0.250 in) thick 316 stainless steel covers with mating geometry identical to that of the wafer holder were designed to cover the circular ports not filled by the wafer holder. One of the covers featured four individual thermocouple ports, while the other was blank. Installing the thermocouples in one of the port covers allowed them to always remain in the same orientation relative to the wafer; when the wafer was moved from the upright orientation to the vertical orientation, the port cover with the thermocouples was moved from the vertical port to the bottom port. Lastly, in order to make the chamber compatible with NASA Document AOD-33897, four flanges with 9.53 mm (0.375 in) diameter holes in a vertical 5.80 cm (2.00 in) spaced pattern were added to the chamber that would serve as an 37 interface to mount to a rack. These flanges also served to support the high-speed camera and the backlighting assembly. 4.5.3. Pool Temperature Control Maintaining control over the chamber pool temperature was critical to performing experiments at subcooled and saturation conditions. In general, precise temperature control of any kind can be accomplished by means of a PID control loop supplied with temperature measurements from thermocouples, controlling some type of heat source. This configuration allows the pool temperature control to be performed automatically and autonomously. As discussed in Section 4.4.1, pool temperature control was initially performed using a hot oil loop. However, because of its ineffectiveness, the hot oil loop was replaced with two electrically powered 600W cartridge heaters (Watlow part # G6A56-BG12) that were immersed in the pool and controlled by a PID controller (Omega part # CNi3253-DC) through a separate high-current relay (Omega part # SSR330DC50). The cartridge heaters greatly simplified the heating system and were far more effective at heating the pool than the hot oil loop. There were no active cooling systems; cooling of the pool relied on heat losses through the chamber walls since future flight experiments would not permit the use of the chiller. 4.5.4. Chamber Flow Loop The entirety of the fluid flow loops consisted of a condensing equipment flow loop and a fill/drain flow loop. Figure 4.7 shows the layout of the two flow loops; the following sections will describe each in detail. 38 Figure 4.7: Layout of the two flow loops implemented in the experimental facility. A condensing equipment flow loop was responsible for condensation of the vapor in the chamber, and a fill and drain loop was responsible for filling, draining, and filtering the pool. In order to condense vapor in the chamber, condensation coils were installed. These coils were designed to be used with either the Thermo Scientific NESLAB ThermoFlex5000 Circulation Chiller with positive displacement pump, capable of removing up to 5kW at 20°C at a flow rate of up to 15.5 L/min, or the Thermo Scientific ThermoHaake C30P Heating Refrigerated Water Bath Circulator, capable of removing 800W at temperatures as low as 3°C at a flow rate of up to 24 L/min. The length of tubing needed for condensation of vapor was estimated as a part of design of the coils. The condensing coils were designed to fit inside the chamber while keeping clearance with the circular port around which it was installed so that there would be no interference with the wafer holder when installed in the inverted orientation. For this reason the tubes were coiled to maintain clearance around the circular port (Figs. 4.9a, 4.15, 4.19b). An additional restriction was that the condensate dripping onto the liquid-air interface would not affect the flow near the test section. This requirement was 39 met by default as the coiled tubing configuration used to provide clearance for the holder in the inverted orientation left the area above the test section free of condensing equipment in all orientations. Double shut-off quick disconnect tube couplers from Swagelok allowed the chiller to easily be disconnected from the condensation coils. The length of tubing required to condense at a minimum rate of 1200W (the maximum heating capacity of the cartridge heaters) was determined using Matlab®; all fluid properties used were for water. A 1D resistance network, shown in Fig. 4.8, was used to model the heat transfer from the saturated vapor to the coolant in the condensing coils. Figure 4.8: 1D resistance network used to determine the minimum tube length required for the condensing coils. The heat transfer coefficient for the flow in the tube was calculated using single-phase convection: ̅ ⁄ [ ] [ ] (4.1) The total heat transfer rate was calculated using the resistance network shown in Fig. 4.8. Since no explicit solution for the tube length as a function of total heat transfer rate could be found, this value was determined iteratively by first guessing a length and then solving for the total heat transfer rate by minimizing the residuals of the inner and outer log mean wall temperatures. The length was increased until the total heat transfer rate was greater than 1200W. Initial guesses for an average inner and outer log mean wall temperatures as well as coolant exit temperature were set. The following equations were solved iteratively in order; first the condensation heat transfer coefficient was calculated: 40 ̅ where * ( ⁄ ) ( ) + (4.2) was determined by ( ) (4.3) and the Jakob number was determined by ( ) (4.4) To determine the total heat transfer rate, the log mean temperature of the system was calculated: ( (( ) For the first iteration, the value for ( )⁄( ) )) (4.5) was determined by the initial guess, whereas all subsequent iterations used the value of from the previous iteration. The value of for the next iteration was calculated as follows: ̅ ( ( )) (4.6) ̇ The total heat transfer rate was then evaluated by dividing the log mean temperature difference by the sum of the thermal resistances, specifically the inner convection, tube wall conduction, outer condensation resistances: ( ( ⁄ ̅ ) ̅ ) (4.7) Using Eq. 4.1-4.7, a total length of at least 1.2 m of 6.35 mm (0.250 in) diameter 316 stainless steel tubing was deemed necessary to remove the heat generated in the chamber. Because of the high vapor pressure of FC-72, a precautionary reflux condenser was installed on top of 41 the chamber. The reflux condenser used was 300 mm jacket length borosilicate glass Graham condenser. The condenser was cooled using the same source as the stainless steel condensing coils, and was installed such that the two flow loops were in parallel. This parallel arrangement reduced the overall pressure drop in the flow loop, allowing for a greater flow rate than in a series arrangement. Figure 4.9a shows an overview of the complete condensing loop; Figure 4.9b shows film condensation of FC-72 on the chamber’s condensing coils during experiments (a) (b) Figure 4.9: Overview of condensing loop. Stainless steel coiled tubing was installed inside the chamber and an externally mounted Graham reflux condenser installed in parallel to minimize pressure drop; double shut-off quick disconnects connect the condensing loop to the chiller (a); condensing coils inside the chamber condensing FC-72 during a test (b). 42 Because the images acquired by the Phantom V310 high-speed camera are used for qualitative evaluation of the test section performance as well as image processing, it was critical that there was no visible particulate in the fluid that would otherwise affect the image processing algorithm’s results. For this reason, a small gear pump (Cole Parmer part # WU00132-YQ) was used to pump fluid directly from the fluid reservoir through a filter into the chamber. For water, a 15-micron sintered stainless steel filter (Swagelok part # SS-4F-15) was used, and for FC-72, a 7-micron sintered 316 stainless steel filter (Swagelok part # SS-4F-7) was used. The filters required regular cleaning to keep the pressure drop within the limits of the pump. The wetted materials of the pump were chosen for compatibility with both water and FC-72. In particular, EPDM O-rings were substituted for the stock Buna-N O-rings. The tubing used was 6.35 mm (0.250 in) diameter 316 stainless steel tubing with 316 stainless steel Swagelok fittings and valves. Perfluoroalkoxy (PFA) tubing was used to connect the hose barb fittings on both inlet and exit of the pump to the flow loop. This tubing was transparent, permitting flow in the loop to be confirmed by the operator, and Polypropylene nuts and ferrules (McMaster part # 5016K222) were used to mate this tubing to the Swagelok components. Once the chamber was filled, turning a two-way valve allowed the pump to draw water from within chamber as opposed to the external reservoir, enabling the fluid in the chamber to be continuously filtered, removing any particulate that may have been present inside the chamber before filling. The pump also served to thoroughly mix the pool before pool temperature data was acquired. Once an experiment was completed, the chamber could be drained directly back into the reservoir through the drain tube after turning the drain valve. An overflow tube was installed at the top of the chamber and connected to the drain tube downstream of the drain valve. In the event the pump was inadvertently left on, the excess fluid in the chamber would overflow through this tube into the drain line, precluding any spills or a chamber over-pressure that could break the silicon wafer. Figure 4.10 shows the complete pump fill and recirculation loop, along with the overflow tube. Pictures of the various components in the pump fill and recirculation loop are shown in Fig. 4.11. 43 Figure 4.10: The chamber’s fill and recirculation loop with emergency overflow protection. A two-way valve selects either an external reservoir or the chamber as the source for the gear pump. A 15-micron sintered stainless steel filter insures that particulate in the liquid being pumped in from the reservoir or being recirculated is removed before being pumped into the chamber. (a) (b) (c) (d) Figure 4.11: Overview of the components of the fill/drain flow loop. Shown are the pump and pump selector valve in the recirculation position (a), the 15-micron filter (b), the chamber overflow (c), and the drain valve in the closed position (d). 44 4.5.5. Imaging To enable future PIV and LIF measurements, provisions were necessary for a laser light sheet to enter the chamber and be incident on the wafer. Because the surface of interest on the wafer consists of a ratchet pattern with a 30 degree ratchet angle, it is necessary for the laser light sheet to be incident to the surface at a minimum angle of 30° to illuminate the trough regions of the ratchets. However, providing such laser sheet illumination in all three orientations (30° down for the upright orientation, straight in for the vertical orientation, and 30° up for the inverted orientation) as shown in Fig. 4.12 without changing the position or orientation of the laser, required an ingenious design. Figure 4.12: Required laser light sheet incidence angle on the test section as it depends on the test section orientation. The laser port was designed so that a fixed source could provide all three incidence angles. To permit illumination of the wafer in any of the three orientations, a special laser port was designed. The laser port featured a prism that would deflect the light-sheet down by 30° upon which it would enter the chamber through a window that was oriented perpendicular to the incident light sheet. The entire laser port assembly could also be installed upside down to deflect the laser light sheet upwards at 30°. 45 In order to deflect the laser light sheet by 30°, the correct prism dimensions and properties had to be determined. The deflection angle of the laser light sheet is a function of the prism’s index of refraction, the prism angle, and the orientation in which it is installed. A Matlab® script was written to determine the prism angle and orientation that would permit deflection of the light sheet by at least 30°. The prism material chosen was BK7 as this is a common material for prisms; the refractive index for BK7 is N = 1.5195 for λ = 532 nm (PIV laser), N = 1.5234 for λ=473 nm (LIF laser) [40]. Prism angles The prism tilt angle ranging from 10° to 60° were studied. was also studied. Figure 4.13a shows a diagram of the prism with prism angle , the prism tilt angle , and the incident and refraction angles . The beam refraction due to the prism was computed using the standard refraction formula: ( ) ( ) (4.8) When written in terms of the prism angles and indexes of refraction, this equation becomes Where incident angle and ( ( )) (4.9) ( ( )) (4.10) . The beam deflection , the refracted angle was computed using the , and the prism angle : (4.11) Combining the above equations, the beam deflection becomes * ( * ( )+)+ (4.12) 46 (a) (b) (c) Figure 4.13: Selection of the laser light sheet prism. A diagram (a) showing the prism angle , prism tilt , and the total beam deflection angle shows the variables considered. Plots show the various beam deflection angles as they correspond to laser wavelengths of the PIV laser (b) and the LIF laser (c). Beam deflection was calculated as a function of prism tilt, prism angle and index of refraction (a function of the wavelength of the light sheet) for both the PIV laser with λ = 532 nm (Fig. 4.13b) and the LIF laser with λ = 473 nm (Fig. 4.13c). Each curve in Fig. 4.13b,c represents a particular beam deflection. Both plots show that a 45° prism (indicated by the dashed horizontal line) can deflect a 532 nm or 473 nm wavelength laser light sheet by at least 30°, provided that the prism is titled more than 15°. Because 45° prisms are very common, this was an effective means of deflecting the light sheet. The prism (Thorlabs part # PS908H-A) was mounted on a rotation platform (Thorlabs part # RP01) so that the tilt could be adjusted. This allowed the beam deflection to vary between roughly 27° and 38° if so desired (for example if the ratchet angles were to be varied). Figure 4.14-4.16 show the implementation of the prism and two laser ports in the chamber used to illuminate the test section in the upright and vertical orientations. The laser port’s mating geometry to the chamber was rectangular to allow only the intended upright or inverted installation of the laser port assembly. 47 Figure 4.14: The laser light sheet as it is deflected by a prism in the upright orientation. Figure 4.15: The laser light sheet as it is deflected by a prism in the inverted orientation. 48 A second laser port was designed for use in the vertical orientation that featured a simple window mounted perpendicular to the incoming sheet, thus permitting the light sheet to pass into the chamber undeflected. The laser port assembly was designed for the light sheet to enter at its center, allowing the laser to remain fixed for this configuration as well. Figure 4.16: The laser light sheet as it enters the chamber in the vertical orientation. A simple laser port was used in this configuration as the laser was already aligned with the test section to illuminate the troughs between the ratchets. Figure 4.17 shows a demonstration of the deflected beam; the beam is incident from the top-left of the image, illuminating a bubble in the pool. Fluorescent dye (“Sulforhodamine B” from Sigma Aldrich) was dissolved in the pool to make the laser light sheet visible. An optical filter was placed in front of the lens to block the 532 nm wavelength light, but allow the fluorescence wavelength (607 nm) to pass through so that only light emitted by the dye was visible. 49 Figure 4.17: Demonstration of the laser light sheet illuminating a bubble. The light sheet (λ=532 nm) was refracted 30° by a prism to allow the fluid in the troughs of the test section (not included during this test) to be illuminated. Infrared imaging was to be performed using a Nippon Avionics TVS-8500 Series Camera in conjunction with a TVM-8510U Microscope Lens. The camera featured 256 x 236 pixels resolution and provided up to 120 fps recording output. The microscope lens provided a 2.56 mm x 2.36 mm field of view at a fixed working distance of 30 mm. Since the microscope lens must be fixed at 30 mm from the backside of the wafer, an IR camera support (Fig. 4.18) was designed and constructed to support the IR camera in such a way that the lens would remain concentric within the wafer holder, thereby keeping the center of the wafer centered in the image. The support interfaced with the chamber using a rectangular four-hole pattern around the circular port. This mounting interface was common to all circular ports, allowing the IR camera to image the backside of the wafer in any of the three orientations (Fig. 4.19). An adjustable screw in the back of the support allowed the camera to be moved closer or farther away to bring the wafer into focus. 50 Figure 4.18: Infrared camera mounted to custom support designed to interface it with the chamber. The camera position was fixed so that the microscope lens was aligned with the test section. An adjustable screw allowed the camera to be positioned closer or farther from the backside of the wafer to bring the image into focus. 51 (a) (b) (c) Figure 4.19: Cutaway view of the infrared camera mounted to the chamber using the custom support. The holder mated to the chamber with the same interface geometry for the upright orientation (a), inverted orientation (b), and vertical orientation (c), making the positions completely interchangeable. 52 Imaging of the bubble dynamics over the ratchets was accomplished using a Phantom Vision V310 high-speed camera, capable of 3200 fps at 1280 x 800 px in conjunction with an Infinity Optics K2/SC microscope lens with CF-3 objective, providing a field of view between 8.39 mm x 5.25 mm and 12.43 mm x 7.77 mm depending on the working distance. This setup allowed for the observation of the boiling activity on the surface as well as in the plume of the test section. The K2/SC microscope lens with CF-3 objective was chosen for its combination of high magnification (2.06X to 3.05X), long working distance (125-92 mm respectively), and narrow depth of field (0.02 mm at full aperture). The narrow depth of field allowed only bubbles within 0.02 mm of the working distance to be in focus, making it easier to identify only bubbles located in a two-dimensional plane (desirable in particle image velocimetry and in bubble tracking from cavities located on a specific plane). Due to the weight of the K2/SC lens, a custom bracket was designed and machined to relieve the lens mounting interface on the camera from the cantilever forces excreted on it by the lens (Fig. 4.20). Figure 4.20: Custom bracket designed to relieve the camera's lens mount adaptor from the large cantilever weight of the K2/SC lens. The lens was hereby connected directly to the structure of the camera. The high-speed camera was mounted to two aluminum arms extending from the chamber flanges using an ABS base plate as the adaptor. Slots were machined in the plate to allow it to slide on the arms, permitting the camera to be moved closer or farther away from the chamber to keep the ratchets within the working distance range. The 5.80 cm (2.00 in) hole spacing in the flanges permitted the entire high-speed camera assembly to be moved up or 53 down in 5.80 cm increments, allowing the ratchets to remain in view for any of the three orientations required; the bottom three holes were used in the upright orientation, the middle three in the vertical orientation, and the top three in the inverted orientation. A second hole pattern was created in the ABS base plate that also allowed the camera to be moved 5.80 cm (2.00 in) to the side when imaging the wafer in the vertical orientation (Fig. F.21 in Appendix F). (a) (b) (c) Figure 4.21: High-speed camera mounted to the chamber. Camera position is shown for the upright orientation (a), inverted orientation (b), and vertical orientation (c). Because high speed imaging required focused images (minimal motion-blur) at very high frame rates, the exposure time was limited to just tens of microseconds. This short exposure time introduced a secondary requirement for high-intensity illumination of the subject, and in the case of this experimental facility, high-intensity backlighting, as backlighting allowed the bubble to appear as a dark silhouette against a bright background. Initial experiments were carried out using both incandescent bulbs and halogen bulbs behind a paper diffuser, but these methods did not provide a uniformly illuminated background, did not ensure repeatability in bubble tracking, and were eventually abandoned in favor of a densely-packed array of white LEDs. A custom 12.7 cm x 12.7 cm circuit board array of 625 white LEDs each of 17,000 mcd intensity was designed to distribute the backlighting over the entire window area. To allow for the densest possible packing of 2.54 mm (0.100 in) center-to-center, the base flange on 54 each LED was removed using a sanding wheel. To maximize reliability of the array, each LED was fitted with its own current limiting resistor (100Ω) on the back of the PCB (Fig. 4.22). 100Ω 100Ω LED (20 mA) LED (20 mA) 5V (a) (b) Figure 4.22: LED Array circuit. Shown is a picture of the current limiting resistors on the back of the array (a) and schematic of the LED circuits arranged in parallel (b). Each LED had its own 100Ω current limiting resistor on the opposite side of the board to maximize reliability of the array. The total power dissipation of the array was 62.5W, so two small fans were added to keep it cool. The LED array was powered using a 5V source and the fans were powered using a 12V source. The power supply chosen for this task was a standard ATX form factor computer power supply as it supplied all the necessary voltages in a single unit. For this reason, a standard 24-pin through-hole ATX power connector was installed in the LED array’s circuit board to interface the LED array with the power supply. In order to power the fans, the 12V power was routed from the 24-pin connector to two small 2-pin connectors on the board, providing a 12V source for both fans. An aluminum sheet metal cowling served as a duct for the fan flow, the mounting interface to the chamber flanges, and a structure to mount the LED array and fans. Figure 4.23 shows a cutaway view of the chamber and LED array; a diffuse polycarbonate plate was placed between the array and the window to provide uniform backlighting. Figure 4.24 shows the actual array, its installed configuration, as well as its backlighting performance. 55 Figure 4.23: A cutaway view of the chamber showing the position of the LED array. (a) (b) (c) Figure 4.24: The LED backlighting array. The array is shown before installation showing the dense packing of 625 17,000 mcd white LEDs (a), in the installed position between the chamber flanges showing the placement of the cooling fans and the aluminum ducting (b) and in operation with the diffuser installed, providing intense diffuse backlighting for the high-speed camera (c). 56 4.6. Experimental Facility Because the future intent for this experiment was to fly it in a parabolic flight aboard aircraft operated by organizations such as Zero Gravity Corporation, ESA, or NASA, the chamber and all of the supporting equipment was to be contained within a single unit to ensure it meets the standards set for such experiments in parabolic flight [34]. As such, all equipment needed to be securely mounted to a rack, including data acquisition devices, cameras, power supplies, PID controllers, switches, etc. Table 4.4 and Table 4.5 show the instruments and equipment required to perform experiments. Table 4.4: List of instruments employed in the experimental facility. Instrument Model # Measured Specifications Variable KMQSS-125U-6 Temperature -200°C – 1250°C K-Type Thermocouples Accelerometer ADXL335 Thermocouple National Data Acquisition Instruments USB-9211 Accelerometer National Data Acquisition Instruments USB-6009 Acceleration +/-3g Voltage Voltage Uncertainty Mounting ± 0.3°C Fixed Not Calibrated N/A Fixed 4 channels Built-in cold junction 12 samples/sec total 8 Analog input N/A channels (14-bit, 48 kS/sec) 2 Analog output channels (12-bit 150 S/sec) 12 digital I/O channels 32-bit counter Fixed Fixed 57 Table 4.5: List of equipment employed in the experimental facility. 58 Table 4.5 (continued) Equipment Model # High-Speed Phantom V310 Camera High-Speed Camera Microscope Lens Infrared Camera Infrared Camera Microscope Lens Gear Pump Infinity K2/SC body CF-3 objective lens Nippon Avionics TVS-8500 Nippon Avionics TVM-8510U LED Array Custom PID Controller Omega CNi3253-DC Cartridge Heaters Watlow G6A56-BG12 High Current Relay Voltage Multimeter Current Multimeter Omega SSR330DC50 Tektronix DMM912 Tektronix DMM912 Cole Parmer WU-00132-YQ Purpose Specifications Mounting High-speed imaging of flow 3287 frames per Fixed bubble dynamics second 1280x800 px resolution 26.5 x 11.9 mm CMOS sensor Magnification for High2.06X – 3.05X mag Fixed Speed Camera 125-92 mm working distance IR Thermography of test section Magnification for Infrared Camera -40°C – 900°C range 0.025°C resolution 2.56x2.36 mm Field of View 30 mm working distance Pumping/recirculation of Max pressure 21 psi pool fluid max flow rate 0.67 gpm Backlighting for high-speed 625 LEDs: 17,000 mcd imaging each 2 fans: 12 V, 60 mm Maintaining pool ± 0.05°C/°C temperature at desired thermocouple setting temperature stability Providing the control to 2x 600 W, 120 VAC maintain the pool at a given temperature Switching the power to the 24 – 340 VAC, 50 A cartridge heaters 4 – 32 VDC control Measuring voltage across Estimated ± 0.005 V the thin film heater Measuring current through Estimated ± 0.0005 A the thin film heater Fixed Fixed Fixed Fixed Fixed Fixed Fixed Fixed Fixed 59 Table 4.5 (continued) Equipment Model # DC Power PowerMan Supply for IP-P350AJ2-0 Experimental Facility DC Power Tenma Supply for 72-8350 Test Section Coolant Thermo Scientific Circulator ThermoHaake C30P Purpose Specifications Mounting Supplying power to various 3.3V, 5V, 12V, 350 W Fixed experimental facility systems Powering the test section thin-film heater 1-20 VDC, 5 A External Providing the cooling 800 W Heat Removal External capacity for the condensing at 3°C equipment 24 L/min flow rate In order to mount the instruments and equipment effectively, a rack was designed to fully contain the experimental facility within its largest dimensions in the configuration(s) expected during parabolic flight. All three configurations (upright, vertical, inverted) including the infrared camera were still to be possible, but the infrared camera and Graham condenser would not need to be contained within the rack’s largest dimensions as these would not be used in the flight configuration; the condenser would be ineffective in microgravity, and the IR camera was not expected to contribute significant data because the images recorded by the high-speed camera would be far more meaningful. Eliminating the Graham condenser and infrared camera from this configuration allowed to rack to be more compact, and would reduce the operator’s workload in the aircraft. Figure 4.25 shows the experimental facility with all attached instruments and equipment as it was most frequently configured for the work discussed in this thesis (i.e. without the infrared camera). All instrumentation and switches were securely mounted in one area for efficient use. 60 (a) (b) Figure 4.25: Overview of the experimental facility. The entire experimental facility is pictured in (a); overall dimensions and placement of modules is shown in (b). 61 The rack was built using a standard T-slotted aluminum frame system. This not only allowed for the easy mounting of all modules, but also would allow the frame members to be recycled for use in future experiments if so desired. All frame members were machined to size on a milling machine to ensure a good fit. The ends of each primary frame section were threaded with M8x1.25 thread to accept 3-way corner couplers. This ensured easy mating and guaranteed perpendicular alignment of the frame members. The only modifications made to the frame members were the thirteen 9.53 mm (0.375 in) holes spaced 2.54 mm (1.000 in) apart in two vertical members to which the chamber was bolted. The chamber together with the attached high-speed camera weighed an estimated 52.3 kg (115 lbs), which prompted a stress analysis to insure that mounting it to the rack as a cantilever would not result in material failure in the lab or in future flight experiments for which the facility must withstand a maximum loading of 9g [34]. A simple single-part static stress analysis was set up to determine if the intended design was strong enough to meet flight-worthy standards. The weight and location of the center of gravity of the chamber and high-speed camera during 9g acceleration were simulated by a single remote load of 2308 N (517.5 lbs), half of the total load at this acceleration as the chamber is mounted to two such frame members symmetrically (Fig. 4.26a). The worst case scenario for this analysis is that the frame member is a simply supported beam, meaning the ends do not resist any internal moments. The results of the analysis, performed in Solidworks COSMOS, are shown in a stress plot with greatly exaggerated deformation to show the deformation mode (Fig. 4.26b). The analysis confirms that the maximum stress is not expected to exceed 275 MPa, the yield strength for 6061-T6 Aluminum; the chamber was subsequently installed in the rack in this manner. 62 (a) (b) Figure 4.26: Static stress analysis performed one of two vertical frame members that support the chamber. The simulated load was applied at the center of gravity and was 4.5 times the weight of the chamber with the high-speed camera attached, simulating 9g acceleration (a). Results show that the maximum stress is not expected to exceed the yield strength of the material (b). 4.6.1. Accelerometer Because possible microgravity flight experiments would require the recording of accelerations, an accelerometer was mounted as close as possible to the test section to one of the vertical chamber support members discussed above (Fig. 4.25). The accelerometer used was an ADXL335 3-axis accelerometer, purchased on an existing breakout PCB from Sparkfun Electronics. The PCB was mounted to a custom non-conducting polycarbonate base and clamped down since the PCB did not feature mounting holes (Fig. 4.27). A six-pin rightangle socket (Molex part # 70553-0109) was soldered in the board to provide the necessary power, ground, and signal connections for reliable data acquisition. In addition to providing acceleration data acquisition for documentation purposes, the accelerometer was also used as a means of triggering the high-speed camera to initiate recording. Figure 4.28 shows the components of the high-speed camera triggering setup. The Phantom V310 was purchased with a breakout box for a number of the functions available in the user interface. Two of 63 these functions were of particular interest, namely “Trigger,” and “Event” (Fig. 4.28c). The “Trigger” function initiates recording, and the “Event” function adds an event marker to the timeline for the duration it is activate. Both of these functions are useful for autonomous control of the camera using the accelerometer. A LabVIEW program was created that compared the acceleration data to a user-defined threshold. When the magnitude of the accelerations in each axis fell below their respective thresholds, the camera was triggered through custom cables (Fig. 4.28a). Figure 4.27: 3-Axis Accelerometer used to monitor chamber accelerations and act as a highspeed camera trigger. The accelerometer was mounted to a T-slotted frame member by the chamber. (a) (b) (c) Figure 4.28: High-speed camera triggering setup. The camera’s breakout box controlled via custom cables (a) by the accelerometer mounted to the experimental facility rack (b). LabVIEW software monitored the accelerometer data and could control the camera’s trigger function, event function, and if a third circuit is added, the pre-trigger function (c). 64 Figure 4.29 shows how the triggering was accomplished. A +5V signal was applied to the gate of a transistor by the USB-6009 Module (triggered through LabVIEW), creating a conducting path from the BNC connector’s conductor to ground, which was kept at the same potential as the BNC connector shield. When the conductor was shorted to the shield, the camera function corresponding to the connector to which the circuit was coupled was activated. This configuration allows the computer to monitor accelerations and trigger the camera only when the experimental facility experiences low gravity, as well as activating the timeline marker when microgravity conditions are met, for example, providing the necessary capability to operate the experimental facility autonomously during parabolic flight. (a) (b) Figure 4.29: The camera triggering transistor circuit functioning as a solid state relay. Shown is a picture (a) and schematic (b) of the circuit. The 5V source was applied by the USB-6009 Analog Input/Output Module and would short the BNC conductor to ground, triggering the corresponding function on the high-speed camera’s breakout box. 4.6.2. Electrical Connections Since there are a number of electrical systems in the experimental facility operating on a variety of voltages, the power supply chosen to power the DC systems was a standard ATX form factor computer power supply (PowerMan IP-P350AJ2-0) as it provided 12V for the heater relay, the PID controller, the fans on the LED array, and the gear pump, 5V for the LEDs on the LED array, and 3.3V for the accelerometer, providing all of the necessary DC sources with a single power supply. Standard electrical connectors were used to connect the power supply wiring harness to the various systems so that any one of them could be disconnected if so desired. The cartridge heaters were powered directly from a wall outlet 120VAC source, switched by a relay which was controlled by the PID controller. Figure 4.30 65 shows a schematic of all of the electrical connections in the experimental facility, and Fig. 4.31 shows images of various systems and connections in the experimental facility. 23.3Ω Cartridge Heaters 120 VAC Control Panel Chamber Heater Relay K-Type Thermocouples PID Controller Power Supply 12V DC Gear Pump LED Array Fans 5V DC USB-9211 DAQ Computer LED Array 120 VAC DAQ 3.3V DC Accelerometer USB-6009 Transistor Triggering Circuit High-Speed Camera Figure 4.30: Schematic of electrical connections for the cartridge heater circuit and the experimental facility systems. All electrical connections were made using properly rated connectors so that systems could be easily disconnected from the circuit. A separate 120VAC source was used to power the cartridge heaters to avoid excessively high current. (a) (b) (c) (d) Figure 4.31: Overview of various electrical systems in the experimental facility. Shown is the primary power supply (a), the control panel for all of the facility’s electrical systems (b), the wiring for the PID controller, relay, and power switches (c), and the wiring harness for the LED array (d). 66 5. EXPERIMENTAL PROCEDURES Because a new phenomenon was being quantified and because of the fragility of the test section and use of sophisticated hardware, it was of the utmost importance that a strict procedure was followed. This chapter outlines the procedures followed during startup, operation, and shutdown of the experimental facility. A detailed description of each step is provided first, followed by a summary in the form of a flowchart that can be used as a reference for future experiments. It should be noted that although accommodations were made for future use of Particle Image Velocimetry (PIV), Laser-Induced Fluorescence (LIF), and the Infrared camera, these systems were not used in any of the experiments discussed in this thesis, and are therefore not discussed in these procedures. The startup procedures differed slightly depending whether water or FC-72 was used as the working fluid. In general, more care was required when handling FC-72 due to its volatility and cost. Procedures specific to FC-72 are provide in Appendix B since this fluid was not used for any of the results discussed in the thesis. 5.1. Startup Procedure Significant preparations were made before experiments could take place. Primary concerns for experiments were cleanliness of the wetted surfaces, purity of fluids, and fragility of the test section. Two hours was usually required to fully prepare the facility and the test section for experiments. 5.1.1. Cleaning the Chamber Before powering any systems, the first step was cleaning of the chamber to remove any particulate matter. This insured that there would be no visible particulate in the images captured by the high-speed camera, and that the test section would remain uncontaminated. In order to clean the chamber effectively, the top and bottom circular ports were opened. The chamber was cleaned first by thoroughly blowing it out using a standard filtered compressed air source, this removed any loose particulate. A tray was then placed below the 67 chamber and at least two liters of deionized water were poured inside along the walls and windows of the chamber using a funnel and tube, and drained out the open circular port in the bottom of the chamber. This rinse removed particulates adhering to the walls that were not dislodged by the compressed air. 5.1.2. Cleaning and Mounting the Test Section The silicon wafer with the test section was kept stored in a sealed container, and the topside was cleaned before being mounted in the chamber. It was first rinsed with acetone followed by deionized water and then left to dry. In order to ensure an optically clear path between the test section and the camera, the polycarbonate clamp walls were cleaned using isopropyl alcohol. Once cleaned, the clamp assembly was rinsed with deionized water and left to dry. The presence of the O-ring in the groove on the polycarbonate wafer holder was checked and the silicon wafer was placed on top of the holder with the ratcheted surface of the test section facing up. The four contact pads on the thin film heater on the backside of the wafer were visually aligned with the four copper pogo pins in the holder to ensure there would be good electrical contact. Alignment of the test section was verified to be orthogonal with clamp, so that the camera would capture events occurring between the crests of the ratchets such as bubble growth and departure. Once the wafer was adequately aligned on the holder, the Polyetheremide wafer clamp with optically clear polycarbonate sidewalls was carefully placed over the wafer in such an orientation that the clear sidewalls were parallel to the ratchet pattern direction. 68 (a) (b) (c) Figure 5.1: Installation of test section in chamber. After the wafer is clamped to the holder (a,b) the assembly is installed in the desired orientation in the chamber (c). Clamping the wafer was a tedious process, as the pogo pins kept the wafer from resting in its designated recess in the top face of the holder. For this reason, the clamp was very carefully screwed to the holder while alignment was periodically checked (Fig. 5.1a). Only the two #10-32 x 19.05 mm (0.750 in) stainless steel button-head cap screws were used for the initial clamping. Once the wafer rested in its recess, the remaining four #10-32 x 38.10 mm (1.500 in) stainless steel cap screws were inserted. In order to prevent the wafer from fracturing due to non-uniform compression against the O-ring, all six screws were tightened iteratively in a star pattern until the clamp mated to the holder (Fig. 5.1b). When mated, the O-ring was compressed by the wafer to make the seal. This method proved successful as it did not result in a single failure of any of the silicon wafers. After installation of the test section, all four electrical connections were checked with a multimeter to ensure proper contact and the entire test section assembly was installed in the desired chamber port using twelve #10-32 x 15.88 mm (0.625 in) stainless steel cap screws with stainless steel washers (Fig. 5.1c). The O-ring seal was verified by checking that the wafer holder mated flush to the chamber. 69 5.1.3. Filling and Degassing Before filling of the chamber, the condensing loop was coupled to the Thermo Scientific Thermo Haake C30P Heating Refrigerated Water Bath Circulator. The chiller was set to 4°C and the pump speed was dialed to the high setting and allowed to reach steady state. Operation of the cooling loop was checked by confirming the reflux condenser was filled with cold water. The chamber drain valve was set to the closed position, and the pump selector valve was set to the fill position, allowing the pump to draw fluid from an external source. Because the gear pump’s dry performance was always very poor, the liquid reservoir it drew from was placed at a level higher than the pump, and in the case of water, some was syphoned through the clear PFA tubing before connecting it to the pump’s feeder line, insuring there was a positive pressure feeding the water to the pump. A second length of PFA tubing was connected to the chamber drain line and inserted into the reservoir, preventing spills during drainage or due to an overflow. The LED array was turned on first, allowing for a clear view of the inside of the chamber. This allowed allow any problems such as a low fill rate (usually caused by a plugged filter) inside the chamber to be spotted more easily. The pump was then switched on, drawing fluid through clear PFA tubing from the reservoir, and pumping it through the inline 15-micron sintered stainless steel filter into the chamber. Additional clear PFA tubing on the pump inlet and outlet served as a means of checking if the pump was pumping liquid or if it remained dry. While the chamber was filling, all O-ring and compression fitting seals were checked for leaks. However, because all tests were conducted at atmospheric pressure, and the pump pressure was always low, leaks were rare. Any leaks that were detected were the result of improper compression of an O-ring or of the failure to tighten the compression fitting to the specifications. The pump was left on until the chamber was filled to a depth of at least 18 cm for the upright orientation. Once filled to the desired level, the pump selector valve was set to the recirculating position, temporarily switching the pump off in the process. This allowed 70 the pool to be filtered continuously during the degassing phase. The reservoir was set on the ground, allowing any potential overflow to drain back into the reservoir. After filling the chamber, the power cable for the cartridge heaters was plugged in, the PID controller set temperature (“SP2” on the controller) was set above the saturation temperature of the liquid (100°C for water) to ensure continuous heating, and the cartridge heaters were switched on. Prior to this point, the power switch to the cartridge heaters was set to the “off” position and the power cable for cartridge heaters was unplugged. This was a safety precaution that insured the heaters would not be powered while there was no liquid in the chamber, precluding dangerously high temperatures and burnout of the heaters. In addition to the rising pool temperature displayed by the PID controller, the presence of convective currents over both cartridge heaters served as visual confirmation that the heaters were functioning properly. The pool was left at saturation temperature for at least one hour to properly degas the fluid. While degassing, the test section was powered to initiate nucleation in the cavities. As described in Section 2.1, hysteresis can occur at the onset of nucleate boiling. The test section was therefore supplied with up to 4.00 A of current for at least one minute to initiate nucleation from all cavities, ensuring wallsuperheat conditions were uniform everywhere on the test section. The current was gradually increased from zero to prevent any sharp temperature gradients from cracking the silicon wafer. The current and voltage were each monitored by a Tektronix DMM912 digital multimeter. After degassing and initiating nucleation on the cavities, the pump was switched off. 5.1.4. Additional Hardware and Software The high-speed camera was mounted in a position corresponding to the test section orientation as described in Section 4.5.5. Before powering the Phantom Vision V310 HighSpeed Camera, the K2/SC Microscope Lens with CF-3 objective was mounted to it, and the lens support bracket was installed. The camera’s power supply was then plugged in (instantly powering up the camera) and the Ethernet cable was plugged into the computer. After waiting until the LEDs on the back of the camera labeled “Ethernet” stopped blinking, the 71 Phantom Software was started, and the image was displayed by selecting “Setup and Recording…” from the “Acquisition” pull-down menu. This order of operations was critical as starting the Phantom Software too early could corrupt the camera’s firmware and make it unusable. To permit temperature and acceleration data monitoring/acquisition, as well as external camera triggering, the temperature data acquisition module (National Instruments USB9211) and accelerometer data acquisition/camera triggering module (National Instruments USB-6009) were plugged into the computer’s USB ports. Once the modules’ indicator LEDs turned on, the LabVIEW data acquisition program was started, permitting the chamber accelerations in three directions and internal temperatures to be monitored, and the highspeed camera to be triggered through the LabVIEW software as described in Section 4.6.1. 72 Clean chamber Blow out chamber with filtered compressed air Rinse inside of chamber with deionized water Will FC-72 be used? Yes No Install Test Section Clean test section with Acetone and rinse with deionized water Clean wafer clamp with Isopropyl Alcohol Check for presence of O-ring Align wafer with pogo pins in holder Check for good electrical connection to thin-film heater Clamp wafer to holder by gradually tightening screws in a star pattern, continuously checking alignment Check electrical connections with multimeter Fill Chamber Connect coolant hoses to condensing loop Turn on chiller pump and set temperature to 4°C Remove and flush chamber filter and reinstall Close drain valve, set pump selector valve to fill position Connect feeder tube and insert into liquid reservoir Turn on LED array for visibility Turn pump on and fill to desired level Turn pump off, set pump selector valve to recirculation position and turn pump on again Initiate Test Section Nucleation Power test section to initiate nucleation on all cavities Set chamber temperature to above saturation temperature on PID Controller (“SP2”) Turn pump off. Blow out fill and drain loop with filtered compressed air Allow 24 hours for chamber to dry thoroughly Heat Pool Connect power cable for cartridge heaters Set chamber temperature above saturation temperature on PID Controller (“SP2”) Switch cartridge heaters on Yes Saturation temperature Reached? No Additional Hardware and Software Turn on high-speed camera and start software Plug in DAQ devices and start LabVIEW program Wait 1 hour Figure 5.2: Flowchart for startup procedures. 73 5.2. Continuous Operating Procedure Before acquiring high-speed videos, the camera lens was set to focus on the desired row of cavities. By selecting the “Edge Highpass 5x5” edge detection filter in the image processing dialog box in the camera user interface, the image could be focused more accurately, adjusting the lens focus to where bubble edges appeared brightest. By default the camera’s aperture was set to 100% open to let the maximum amount of light in, permitting the shortest exposure times. Short exposure times ensured the image was subjected to very little motion blur. Additionally, a full open aperture maintained a narrow depth of field (as narrow as 0.02mm), greatly blurring any bubbles outside the plane of interest, and thus allowed the edge detection filters in the post processing to resolve only bubbles within the plane of interest. The test section was then supplied with the desired current, and the temperature controller set-point temperature “SP2” was set to achieve the desire subcooling and left to reach steady state, at which point the current and voltage displayed on the multimeters was entered in the LabVIEW interface and the camera mode we set to “Capture,” awaiting the external trigger signal. Before triggering the camera, the cartridge heaters were switched off to prevent large scale convective flows from possibly affecting the flow near the test section. At least 30 seconds were allowed to pass. To record data, the “Trigger Camera” button on the interface was clicked, simultaneously recording temperature, current, and voltage data and sending the trigger command to the USB-6009 module, shorting the camera’s “Trigger” BNC connector on the breakout box. The accelerometer could also be used as a trigger if so desired: a threshold could be set for each axis, and when the magnitude of the recorded accelerations fell below the threshold of each axis, the data acquisition and camera would be triggered. After data acquisition, the cartridge heaters were switched on again, and either a new pool temperature was set in the PID controller, or a different current was supplied to the test section, upon which the same procedures were followed to record the next set of data. 74 Configure High-Speed Camera Set lens to focus on desired row of cavities Set aperture to 100% open Set exposure time as short as possible without losing bit depth Set Experimental Conditions Supply desired power to test section Set desired pool temperature on PID Controller, insure cartridge heaters are on Prepare for data acquisition Enter Current and Voltage readings in LabVIEW Activate high-speed camera “Capture” mode Turn off cartridge heaters Wait 30 seconds for convective currents to settle Data acquisition Trigger camera through LabVIEW interface to simultaneously acquire temperature data Yes Perform another experiment? No Proceed to shutdown Figure 5.3: Flowchart for operation procedures. 75 5.3. Shutdown Procedure Shutdown began by gradually reducing the current supplied to the test section until it reached zero. Shutdown of the test section was confirmed using the high-speed camera’s real-time display, confirming the absence of convective activity. Once confirmed visually and by instruments, the power supply was disconnected from the test section. The cartridge heaters were also switched off and the cartridge heater power cable was unplugged from the outlet and the experimental facility. Disconnecting heater power sources first ensured that it the test section and/or cartridge heaters would not be powered while the chamber was drained, precluding burnout of the heaters. Next the chamber drain valve was set to open, allowing the pool to completely drain back to the reservoir after which it was set to closed. The chiller was turned off and the cooling fluid in the reflux condenser was allowed to drain, after which the condensing loop inlet and outlet hoses were disconnected. Next the LED array was switched off and the experimental facility’s main power supply was switched off. The LabVIEW program was closed and the USB-9211 and USB-6009 modules were unplugged from the computer. In order to prevent corruption of the camera’s firmware, the high-speed camera shutdown procedure was performed as follows: first the Phantom program was closed, then the Ethernet cable was unplugged from the computer and then the power supply was disconnected from the camera. 76 Reduce power to test section Ramp down the test section power, avoid abrupt power cutoff to prevent cracking of the wafer Confirm power cutoff Check that the current and voltage measurements read zero Confirm absence of convective activity over test section Turn off cartridge heaters Put the PID controller in standby mode Turn off cartridge heaters Unplug cartridge heater power cable from experimental facility Drain chamber Open drain valve Turn off all equipment Unplug cartridge heater power cable from experimental facility Turn off chiller and disconnect hoses Turn off LED array Turn off experimental facility power supply Close LabVIEW Disconnect DAQ modules from computer Close high-speed camera software Unplug high-speed camera Ethernet cable Disconnect high-speed camera power Figure 5.4: Flowchart for shutdown procedures. 77 6. DATA ANALYSIS This section covers all work performed to generate the data reported in Chapter 7. A detailed description of the image processing algorithm written to resolve bubbles from the recorded images and compute velocity, acceleration, diameter, and volume information of bubbles that have departed from the surface is presented. Additionally, the calibration of instruments and determination of uncertainties for all measured variables is discussed. 6.1. Determination of Bubble Kinematics In order to obtain quantitative results for parameters like velocity, acceleration, and bubble departure diameter, an image-processing algorithm was developed in Matlab®. The primary focus of image processing described in this section was to resolve the individual bubble velocities through bubble tracking. Briefly, bubble-tracking velocimetry entails finding the displacement of each bubble from one frame (A) to the next (B) and then dividing by the elapsed time to resolve the velocity. The bubble was first located within an image and positively identified. Once positively identified, each bubble in the first frame was paired with the corresponding bubble in the second frame. Any unmatched pairs were deleted and resulting bubble pairs were converted to individual vectors and displayed on a full field of view image of the resolved bubbles. The following paragraphs describe the image processing steps in more detail. After loading the image, the image histogram was stretched linearly over the entire grayscale spectrum such that the maximum amount of contrast was achieved without washing out any pixels (Fig. 6.1). Additionally, this ensured the images used in analysis always had a similar histogram, improving repeatability. 78 (a) (b) Figure 6.1: Stretching the imported image histogram over the full grayscale spectrum. This ensures contrast remains similar for all imported images, improving repeatability. The first step in resolving the bubbles was to apply edge detection filters. Edge detection filters are used to restrict the algorithm to tracking only bubbles within a two-dimensional plane (i.e. the plane of focus). Since the K2/SC lens has a very narrow depth of field (as low as 0.02 mm at full aperture), the bubbles located outside the depth of field appear greatly blurred, and are not resolved by the edge detection filters (depending on the sensitivity set by the user). Three different filters – gradient, Laplace, and Sobel – were applied to the image and the results of all filters were merged in the end. Using multiple filters allowed certain bubbles to be resolved that individual filters may have missed. The perimeters of bubbles still attached to the surface could not be resolved as there was no distinct edge between the bubble and the surface to resolve; only departed bubbles could therefore be resolved. Figure 6.2 illustrates the steps of processing an image using the Sobel filter. Similar processing steps were performed for the two other filters and the results were combined prior to tagging the bubbles for tracking. Upon applying the edge detection filter (Fig. 6.2b), the next step was to binarize the image (Fig. 6.2c). All pixels with a value above the userdefined binarization threshold were set to a value “1” and the remaining pixels were set to a value of “0”. The optimal threshold value was determined iteratively for each of the three filters and kept constant for all experiments to allow for meaningful comparisons. Henceforth, the term “region” will be used to refer to any continuous group of binary pixels with a value “1”. Following binarization, the image was further processed to resolve as many 79 regions as possible to represent the location and shape of bubbles in the image. Since the edge detection filters only resolved bubble perimeters, the shape of the resulting region is in the binarized image was usually a ring. For this reason all holes in the regions are filled to obtain regions representative of a complete bubble (Fig. 6.2d). (a) (b) (c) (d) (e) (f) Figure 6.2: Image processing steps to resolve bubbles. Shown is the original images (a), the Sobel filter applied to original images (b), the binarized image (c), the filled hollow regions (d), the applied convex hull criterion (e), and the deletion of noise and regions contacting the image border (f). It is possible that some bubble edges were not fully resolved (i.e. there is a gap in the edgedetected ring). To retain these regions, a convex hull process was applied as shown in Fig. 6.2e. The convex hull refers to the smallest envelope containing the region with continuous convex geometry, and can also be thought of as the outline that a rubber band would trace if it were pulled around the region. If the set of points representing the convex hull bridges a gap that exceeds a threshold (set as a fraction of the region’s major diameter), the original bubble edge is retained. However, if the threshold is not exceeded, the region is replaced 80 with its convex hull, effectively enclosing the incomplete edge of the bubble. Figure 6.2e shows that the smaller bubbles are resolved using the convex hull whereas the larger bubble to the lower left hand corner remains unresolved. The next image-processing step was deletion of regions that were artifacts resulting from the background or from noise. These regions were filtered simply based on an area threshold, specified by the user (Fig. 6.2f). Any regions connected to the image border were also removed at this stage, as there would be no way of resolving partial bubbles that move in or out of the frame in subsequent images. After the regions were resolved, they were processed to retain only those regions that represented the location and shape of bubbles in the image. Two criteria had to be met for a region to “pass” as a bubble: (1) region solidity (area/convex area) > threshold – This criterion was applied to eliminate regions resolved without continuous convex edges, and (2) region eccentricity < threshold – This criterion was applied to eliminate regions with high eccentricity. Figure 6.3 shows which regions were eliminated for not meeting the solidity and eccentricity criteria, labeled red and green respectively. Such regions are unlikely to represent the outline of a bubble, which is usually spherical in shape. All threshold values were set by the user and could be adjusted to resolve bubbles whose shape would otherwise not permit classification as a bubble. 81 Figure 6.3: Tagging of regions during image processing. Regions that did not meet the solidity criterion (red) or eccentricity criterion (green) were removed, preserving the remaining regions. Lighter shades represent regions from image A, darker shades represent regions from image B. Following identification of bubbles in each image, bubble tracking was performed. The first step in bubble tracking was determining the locations of each region’s centroid. For any region with equivalent diameter equal to or greater than 0.1 mm, the centroid was computed as the centroid of the pixels in the region. For small regions with equivalent diameters less than 0.1 mm) the centroid location was weighted by the intensity of the corresponding pixels in the original image. Intensity weighting the pixels within the region ensured that any misrepresentation of the dot due to poor focus or incorrect binary threshold settings would have minimal effect on the accuracy of the centroid computation. Due to the fairly low quantity of bubbles in each image, it was not necessary to use advanced algorithms for determining bubble pairs between images. A nearest-neighbor approach was used to match bubbles in image A to those in image B. Figure 6.4 shows the bubbles pairs identified in image A and image B. For each region in image A, the distance between its centroid and each region’s centroid in image B was calculated. The pair with the shortest centroid-to-centroid distance was logged as a matched pair; their respective indexes in the region-numbering scheme were logged in a separate table. Each matched pair was filtered for violation of the area ratio threshold (area(A)/area(B) < threshold). This filter ensured that only bubbles with similar area would be logged as pairs. Those regions that failed this test 82 were tagged orange and subsequently removed. If bubbles were tracked near the cavity in subcooled conditions, the area ratio threshold was set high so that the collapse of a bubble would not exclude it from analysis. If only the bubbles in the plume were of interest, then this ratio was set low, as bubble collapse was not observed to occur in the plume. (a) (b) Figure 6.4: Bubble pair area ratio criterion applied. If no violations of the area ratio criterion occur, all regions pass and are paired (a) if an area ratio violation does occur, the corresponding bubble pair is tagged orange (b) and excluded from the vector plot. It is possible that two regions in image A are matched to a single region in image B. This often occurred because the second region in image B was not resolved, likely because the bubble moved out of the depth of field. In this case, the pair with the shortest centroid-to-centroid distance was retained, as this pair most likely represented the slight shift in position the bubble has made between image A and image B. Figure 6.5 shows a typical vector plot that results from identification of bubbles in images A and B. The length of the vectors is proportional to the square root of the bubble speed for better viewing of all vectors in the speed range. 83 (a) (b) Figure 6.5: Velocity vector map obtained from bubble tracking velocimetry. Each bubble could be annotated quantitatively with, speed, equivalent diameter, and volume information as well as details on the images used (a), or qualitatively with vectors only (b). Vector magnitudes are proportional to the square root of the bubble speed. Because the shape of the individual regions was rarely circular, the diameter of each bubble is computed an equivalent diameter for a circle with area equal to that of the region. √ [ (6.1) ] Equation 6.2 provides a good estimate of the diameter for the purpose of comparing the data to existing models of bubble departure diameter. The bubble volume was computed assuming the region represents a cross-section of an oblate spheroid (i.e. the minor axis is the axis of symmetry for the volume): ( ) ( )[ ] (6.2) The length of the major and minor axis used in Eq. 6.2 was computed automatically by Matlab® and given in terms of pixels. This was deemed the most accurate method to 84 estimate bubble volume knowing only the shape of the cross section, and was considered quite accurate for bubbles appearing circular or elliptical in shape. However, for greatly deformed bubbles this is likely a meaningless quantity, as there is no axis of symmetry in such a case. Additional error is expected from the bubble diameter calculations, as there was no means of determining the accuracy of the equivalent diameter estimates. Figure 6.6 shows a cropped portion of an image with five regions as resolved by the gradient, Laplace, and Sobel filters (red, green, and blue, respectively). Figure 6.6: Estimated outline of bubbles as resolved by the filter. Shown is the gradient filter (red), Laplace filter (green), and Sobel filter (blue). The gradient and Sobel filters often agreed quite well, whereas the Laplace filter usually resolved smaller regions. The parameters that controlled the size of the resolved region were the binarization threshold and the filter operator size; lower binary thresholds allowed fainter pixels to be included in the region and smaller filter operator dimensions increased the sensitivity of the filter, meaning only sharp gradients would pass as edges. The most effective binarization threshold and filter operator size were determined iteratively for each filter, and kept constant for all experiments. However, the ambiguity as to which filter is more accurate indicates that there is likely some error associated with estimating bubble size using these filters. Since the final region size was a combined result of all three filters, in 85 most cases this simply meant the largest of the three. However, as there was no means of comparing the resolved data to the true values, the uncertainty for this error could not be computed. A flowchart describing the algorithm along with the purpose of the individual functions used is provided in Appendix C. 6.2. Calibration and Uncertainty Analysis In order to provide confidence in the reported results, all instrumentation was calibrated to report accurate measurements if the capability existed. The instruments calibrated were the high-speed camera and the four individual thermocouple probes. In addition to calibration, due to the number of instruments and data processing procedures, a number of sources of uncertainty were expected. Each measurement recorded was expected to have some error associated with it, namely thermocouple measurements, heat flux measurements, motion blur, timing of the camera frame rate, and distortion in the images acquired from the camera caused by the lens as well as the temperature-induced density gradients over the test section. Data processing errors were expected in image processing and use of the thermocouple calibration curves. Some human sources of error were present as well, specifically in determining the resolution of the image acquired by the camera. The following uncertainties were not computed for the listed reasons: Timing of Camera Frame Rate No uncertainty specifications were available for the Phantom V310 camera’s frame rate. However, given internal clock frequency in modern chips/computers, the uncertainties are expected to be on the order of nanoseconds and are therefore orders of magnitude lower than deemed significant. Bubble position as a function of distortion due to duration of exposure As the velocity measurements rely solely on the relative change in a bubble’s centroid position from one frame to the next, unquantifiable errors in absolute centroid position due to motion blur and edge detection errors were not expected to significantly influence this value. 86 Bubble position as a function of image distortion due to gradients in fluid density There was no available means to insert a standard optical grid into the 8 mm x 5 mm field of view above the test section to compare with the in-situ resolution measurements. Additionally, the mere presence of the optical grid would greatly affect the local temperature gradients, rendering any calibration meaningless. Furthermore, the temperature gradientinduced distortion varies greatly with applied heat rate, fluid, and pool temperature; any attempt to calibrate for this would require local temperature measurements during calibration and experiments which would obscure the view of the test section. Experimental Facility Acceleration The accelerometer was not calibrated as it was not used for the work presented in this thesis. 6.2.1. Calibration of High-Speed Camera Calibrating the camera was necessary to compensate for any pixel offset on the CMOS chip caused by the recording parameters set in the user interface. There are a number of variables that can contribute to this pixel offset error, namely the temperature of the CMOS chip, the frame exposure time, extended dynamic range (a function that sets a lower exposure time for brighter pixels), frame rate, and resolution. Fortunately calibration could be performed using the Phantom software’s built-in Current Session Reference calibration function. This function allows the camera to adjust for pixel offset as it may be affected by the aforementioned variables. To perform this calibration, the camera lens was covered and the Current Session Reference button was clicked. 6.2.2. Calibration of Thermocouples All four K-type thermocouples were calibrated using a Heating Refrigerated Water Bath Circulator (Thermo Scientific Thermo Haake C30P) and an NIST standard (Omega PCL-1B with PCL-HR-1 module and PR-11-2-100-1/8-9-E-TA4F RTD probe). As the intended range of operation for this experimental facility was between room temperature and 100°C, the 87 thermocouples were calibrated between 5°C and 95°C in 10°C increments, relying on extrapolation of the calibration curves to extend the calibration to 100°C. The thermocouples were to be mounted in the circular port on the side of the chamber when performing experiments in the upright or inverted orientation. To minimize dangling wires and cables in the facility, the thermocouple leads which connect the probes to the data acquisition unit (National Instruments USB-9211) were made as short as possible (Fig. 6.7a). However, when performing experiments with the test section in the vertical orientation, this port was occupied by the wafer holder, and the thermocouples were installed in the bottom port. Since the existing leads were too short to reach the probes in this configuration, a set of extension cables was made to bridge the gap, and were only used when the test section was mounted in the vertical orientation (Fig. 6.7b). The addition of these cables meant that eight calibration curves needed to be generated, four with the extension, and four without. (a) (b) Figure 6.7: Use of thermocouple extension cables. The standard configuration was used for when the test section was installed in the upright and inverted orientations (a), and the extended configuration was used for when the test section was installed in the vertical orientation (b). The uncertainties for the four probes in both configurations (with or without extension cable) were computed as the square root of the sum of squares. The uncertainty for each probe 88 was dominated by the uncertainty of the standard; average uncertainty was 0.3°C. Details of the analysis and calibration curves are provided in Appendix D. 6.2.3. Uncertainty in Applied Heat Flux Uncertainty in the applied heat flux was a function of the measured voltage and current, as well as the area of the heated surface between the thermal isolation trenches. The uncertainty in the heated area dimension measurements was estimated to be ± 0.05 mm, and the uncertainties of the measured current and voltage were estimated based on the maximum precision at which the DMM912 multimeters could provide a stable reading, ± 5x10-5 A and ± 5x10-4 V respectively. (6.3) The total uncertainty in applied heat flux was estimated using the Kline and McClintock method. Uncertainty values and details regarding the analysis are provided in Appendix D. 6.2.4. Uncertainty in Image Processing There are a number of uncertainties in the imaging process that can affect the final velocity, acceleration, and bubble diameter calculations. The quantifiable uncertainties in this system are image distortion do to the optics, specifically the K2/SC microscope lens and CF-3 objective, uncertainty in the image resolution due to uncertainty in the scale of the reference geometry in experiments, and the accuracy of the measurement of that reference geometry. Reference geometry was needed as in-situ measurements of distance were required during experiments to determine the resolution in pixels per mm of the acquired images. Any vector ⃑ in the image in dimensions of mm was computed as follows: ⃑ ⃑⃑⃑⃑⃑⃑ (6.4) where ⃑⃑⃑⃑⃑⃑ is the measured distance between two points in pixels. The image resolution was determined by visually observing the peaks of the farthest left and farthest right ratchets, 89 and counting the number of pixels between the two (Fig. 6.8). This number was then divided by the known distance, computed as a multiple of the ratchet periods. Figure 6.8: Method of calculating the image resolution. The number of pixels between the farthest left and right ratchet peaks was counted and divided by the known distance (1 mm per ratchet period). * + (6.5) Substituting Eq. 6.5 in Eq. 6.4 gives ⃑ ⃑⃑⃑⃑⃑⃑( ) [ ] (6.6) Uncertainties exist in each of the variables in Eq. 6.6. The first uncertainty that is discussed is the uncertainty in ⃑⃑⃑⃑⃑⃑; both the uncertainty in length and direction are considered. Before considering uncertainty it is important to define the source of error in this measurement. The error ⃑⃑ in ⃑⃑⃑⃑⃑⃑ can be represented in terms of the lens distortion error ⃑. It can be shown that a uniform distortion error over the entire image has no effect on the magnitude or direction of a resolved vector, as both points are shifted by the same amount of distortion in the same direction (Fig. 6.9). 90 Figure 6.9: Vector distortion error in a uniform distortion field. The distortion field has no effect on the resolved vector length or direction. The solid outlines represent resolved positions and the dotted outlines represent the true positions. Although the position of the vector has shifted slightly, this will not affect the results, since length and direction are preserved. However, if a gradient in the distortion exists (i.e. the magnitude of the distortion error varies throughout the image), the distortion error in one location might be greater than the distortion error in another. In this case the length and direction of the actual vector is different than that of the resolved vector (Fig. 6.10). 91 Figure 6.10: Vector distortion error in a variable distortion field. Length and the direction of the resolved vector no longer correspond to the actual vector. The solid outlines represent resolved positions and the dotted outlines represent the true positions. Depending on the angle between the gradient in the distortion error and the resolved vector, the error in the resolved vector becomes ⃑⃑⃑⃑⃑⃑⃑⃑ ⃑ ⃑ ( ) ⃑ ̂ (6.7) Eq. 6.7 shows that the error is dependent on the angle. Since the uncertainty sought is a global uncertainty, this angular dependence must be dropped. A conservative (worst case) assumption that the resolved vector is in the direction of the gradient in the distortion error (i.e. ( ) ) simplifies Eq. 6.7 and produces a scalar value of the largest possible error in the magnitude of ⃑⃑⃑⃑⃑⃑, |⃑⃑⃑⃑⃑⃑| : |⃑⃑⃑⃑⃑⃑| where ⁄ (6.8) is the magnitude of the gradient in the distortion error of the image. Additionally, the direction of the actual vector can be computed: 92 ( ) ( ( ) ) ( ( ( ) ) (6.9) (6.10) ) The error in the angle of the new direction can be computed as the difference between and : ( ( ) ) (6.11) To convert this error into an uncertainty, the largest possible value must be found. In order to calculate , the distortion error gradient ⁄ must be found first. The distortion error gradient was computed by first creating a distortion error map, and subsequently calculating the gradient of that map. The distortion error map was created by using a 25 mm x 25 mm fixed frequency grid distortion target with dots of 0.0625 mm diameter and 0.125 mm spacing (Edmund Optics stock no. NT58-509) and comparing the recorded image to a perfect square grid generated using Matlab®. The distortion target was placed between the lens and the LED array, in the working distance range of the K2/SC lens with CF-3 objective (92 mm125 mm), which was the distance to the target from the lens in actual experiments. Several frames were captured with various tilts of the grid to ensure there would be at least one frame in which the grid appeared orthogonal. The most orthogonal image was then imported in Matlab® and binarized such that each dot appeared as a distinct region. The individual regions were then dilated to be slightly larger than the actual dot as it appeared in the image, ensuring the region encompasses an area that would include some of the white background around the dot in the original image. Because the contrast between the dot (black) and the background (white) was high, it allowed the centroid location of each region to be computed by intensity weighting all of the pixels in the image that corresponded to the pixels in any particular region (black was weighted 255, and white was weighted zero). Intensity weighting the pixels within the region ensured that any misrepresentation of the dot due to poor focus 93 or incorrect binary threshold settings would have minimal effect on the accuracy of the centroid computation. After resolving all centroid locations, the average horizontal and vertical spacing between dots was computed and used to generate a perfect square grid with spacing that most closely matched the measured spacing. A complete grid of 84 x 52 was resolved, and the perfect grid was then aligned with the resolved grid at the center coordinate and the magnitude of the displacement between grid points of the exact and the resolved grid were computed to provide the distortion error map (Fig. 6.11). Figure 6.11: Magnitude of pixel displacement magnitude due to lens distortion. The resolution of this map was restricted by the dot density on the optical grid in the field of view (84 x 52). The center of the image was set as the origin (i.e. zero distortion). 94 Figure 6.12 shows the gradient of the distortion error map as it corresponds to ⁄ .A fairly uniform distortion error gradient between 0.02 and 0.06 is observed for most of the image, with higher values (as high as 0.17) at the corners. Figure 6.12: Gradient of pixel displacement magnitude due to lens distortion. The majority of the image shows a near uniform distortion gradient. The values of this map correspond to the maximum velocity uncertainty in terms of fraction of bubble velocity for their respective position in the image. Scale is in pixels/pixel (unitless). The resolution of this map was restricted by the dot density on the optical grid. Based on the distortion gradient map, a single RMS value was computed to represent the error in the magnitude of any vector at all locations as fraction of the total magnitude (Eq. 6.8), keeping in mind that the higher uncertainties exist near the corners: ( 0.0395; ( ⁄ ) = 0.1721 Now that two values for ⁄ ⁄ ) = have been calculated, Eq. 6.11 is used to determine the maximum and root-mean-square angular uncertainty for any vector (Fig. 6.13). 95 (a) (b) Figure 6.13: Results of the computation of the angular error in a vector (Eq. 6.11). Angular error was computed for both the RMS error (a) and the maximum error (b). Figure 6.13 shows that the maximum angular deviation between the resolved vector and the true vector is no more than 1.1° for the majority of the image, and is a maximum of 4.5° in the upper right-hand corner of the image where the distortion error gradient is highest. Such a deviation can occur if the angle between the resolved vector and the distortion error gradient is roughly 45°. The uncertainty in in Eq. 6.5 was a function of the uncertainty in the spacing of the ratchets. The ratchet period was designed to be 1 mm; this was confirmed by placing an optical grid (Edmund Optics stock no. NT58-509) over the test section, and recording the image with a microscope (ken-a-vision T-1754). The side of the glass with the dots was faced down to avoid any parallax errors. Figure 6.14 shows the image recorded by the microscope, revealing an accurate 1 mm ratchet period. Viewing along all six ratchet trough periods, the dot pattern did not phase shift relative to the ratchet peaks or troughs. 96 Figure 6.14: Optical grid placed over the test section to determine accuracy of ratchet period spacing. Each dot is 0.0625 mm in diameter. Dot spacing is 0.125mm. The image shows an accurate 1 mm ratchet period. Additionally, the greatest precision estimated by viewing this image was half the dot diameter (0.0313 mm). The uncertainty in the distance across the six troughs is therefore no more than 0.0313 mm, and the total uncertainty in span can be represented as a fraction of the measured span ( The uncertainty in )( )* + (6.12) in Eq. 6.4 was a function of human error. Therefore, a number of trials were performed, each of which measured the distance across the six periods to within one pixel of the mean. Subsequently, the pixel-counting method was determined to be precise to within one pixel. Unfortunately there was no means of determining the bias error in this approach. However, because this method was visual, any bias error was believed to be much smaller than the precision error, and the precision error was taken as the total uncertainty in the pixel measurement. [ ] (6.13) Since all three errors are independent of each other, the Kline & McClintock method was used to estimate the total uncertainty in ⃑. 97 √( ⃑ ⃑⃑⃑⃑⃑⃑ ⃑⃑⃑⃑⃑⃑ ) ⃑ ( ) ⃑ ( ) [ (6.14) ] Substituting Eqs. 6.8, 6.12, 6.13 in Eq. 6.14, and solving for the three partial derivatives gives √( ) ( ) ) [ ( ] (6.15) Rearranging Eq. 6.15 and factoring out | ⃑| (Eq. 6.4) gives the final uncertainty for any dimension measurement in the image: √( ) ( ) ( (6.16) ) Based on Eq. 6.16, the uncertainty in a point-to-point measurement is calculated for each experimental condition discussed in this thesis as a function of uncertainty in span, pixel count, and either the RMS or maximum lens distortion such that the RMS uncertainties can be given for the majority of the image along with worst-case scenario maximum uncertainties for measurements near the image corners. Table 6.1: Uncertainty in any dimensional computation derived from images due to uncertainty in ratchet spacing, pixel count, and lens distortion (maximum as well as RMS). Uncertainty for each experiment was computed using the Kline and McClinktock method. Test 1 RMS Test 1 max Test 2 RMS Test 2 max Test 3 RMS Test 3 max [ 6 6 5 5 6 6 ] [ 882 882 743 743 737 737 ] ⁄ ± 3.95% ± 17.21% ± 3.95% ± 17.21% ± 3.95% ± 17.21% ⁄ ± 3.95% ± 17.21% ± 3.95% ± 17.21% ± 3.95% ± 17.21% 98 7. RESULTS AND DISCUSSION This section covers the results of the experiments performed in the imaging chamber using the test section. For all results discussed, the test section was in the upright orientation and the infrared camera was not used. The results of three experiments are presented: first a qualitative description of the bubble motion is presented for two subcooling cases, followed by a quantitative discussion including bubble velocity, acceleration, diameter, and departure frequency. Replication of the phenomenon under the high subcooling conditions is demonstrated next. Lastly, a force balance analysis is presented to highlight some of the mechanics involved. 7.1. Qualitative Visualization Three experiments were carried out as part of the proof-of-concept study. The experimental conditions for each of these tests are summarized in Table 7.1. Table 7.1: Experimental conditions for the two tests performed in January (Test 1 and Test 2), and the test performed in March (Test 3). Test 1 2 3 ΔTsub (°C) 4.9 ± 0.3 20.0 ± 0.3 20.0 ± 0.3 Current (A) 1.000 3.000 3.150 Voltage (V) 2.310 7.458 5.444 Applied Heat Flux (W/cm2) 1.96 ± 0.13 18.94 ± 1.26 14.52 ± 0.97 Interval (µs) 312.50 312.50 188.68 Lateral motion demonstrated Slight Significant Significant A qualitative visualization of the bubble dynamics is presented for each test as a series of video frames captured by the high-speed camera. A specific clip was chosen from each fulllength video. These clips were chosen for the clearest view of the area of greatest activity, as it provided the best conditions for the bubble-tracking algorithm to resolve the individual bubbles. The view of a particular site was often obscured by bubbles in the foreground or background or by strong density gradients caused by gradients in temperature which often distorted the image to such an extent that resolving a bubble’s outline was not even possible by eye. For this reason, the camera focus for each test was set to the row of cavities closest to the camera, as thermal gradients over the test section made it difficult to focus on bubbles farther back. The aperture was set to fully open, to allow for the shortest exposure times and 99 restrict the algorithm to resolving only this bubbles in the narrow plane of focus. The images presented in this section are the raw images from the camera with the exception that the image histogram has been stretched over the full grayscale range to enhance contrast for easier viewing as described in Section 6.1. 7.1.1. Test 1 – Low Subcooling The first test was conducted in near saturated conditions ( = 4.9°C) with an applied heat flux of 1.96 W/cm2 (Fig. 7.1). For this reason, large bubbles are evident and the picture is well-focused due to the weak temperature-induced density gradients at such low subcooling. 100 Figure 7.1: Sequence of 20 frames at low subcooling (Test 1). q”applied = 1.96 ± 0.13 W/cm2; ΔTsub= 4.9 ± 0.3°C; Δt = 312.5 µs; exposure time = 40 µs; Aperture 100% open; field of view = 8.61 mm x 5.38 mm; = 24°. 101 Stationary Bubbles Direction of departing bubbles t = 0.00 ms t = 0.31 ms t = 0.63 ms t = 0.94 ms t = 1.25 ms t = 1.56 ms Coalescence t = 1.88 ms t = 2.19 ms Figure 7.1 (continued) 102 Stationary Bubbles Direction of departing bubbles t = 2.50 ms t = 2.81 ms t = 3.13 ms t = 3.44 ms t = 3.75 ms Coalescence t = 4.06 ms t = 4.38 ms t = 4.69 ms Figure 7.1 (continued) 103 Stationary Bubbles Direction of departing bubbles t = 5.00 ms t = 5.31 ms Coalescence t = 5.63 ms t = 5.94 ms Figure 7.1 (continued) Figure 7.1 shows that large bubbles are being generated at the cavity locations, namely on the second and third ratchet from the left. The bubbles grow normal to the 24° slope and continue in that direction after detaching from the cavity opening. As the bubble originating from the second cavity from the left departs, while still close to the test section it repeatedly coalesces with multiple bubbles emerging from that same cavity before these bubbles reach departure diameter. After a number of coalescence events, the bubble is eventually carried away by buoyancy forces. 7.1.2. Test 2 – High Subcooling The second test was performed at a high subcooling ( = 20.0°C) with an applied heat 2 flux of 18.94 W/cm (Fig. 7.2). Much more distortion is evident in these images as the high subcooling creates temperature-induced density gradients, which makes it difficult if not impossible to focus the lens on the desired area. Fortunately there were a few segments of the video that provided a clear view of an active portion of the test section. 104 Figure 7.2: Sequence of 20 frames at high subcooling (Test 2). q”applied = 18.94 ± 1.26 W/cm2; ΔTsub= 20.0 ± 0.3°C; Δt = 312.5 µs; exposure time = 40 µs; Aperture 100% open; field of view = 8.71 mm x 5.44 mm; = 24°. 105 Plume Stationary Bubbles Direction of departing bubble t = 0.00 ms t = 0.31 ms Collapse Collapse Rapid acceleration t = 0.63 ms t = 0.94 ms Collapse Collapsed bubble joins plume flow Direction of bubble growth t = 1.25 ms t = 1.56 ms t = 1.88 ms t = 2.19 ms Figure 7.2 (continued) 106 Stationary Bubbles t = 2.50 ms Plume t = 2.81 ms Collapse Direction of departing bubble growth t = 3.13 ms t = 3.44 ms Rapid acceleration t = 3.75 ms t = 4.06 ms Downward velocity component t = 4.38 ms Figure 7.2 (continued) t = 4.69 ms 107 Stationary Bubbles Plume Direction of bubble growth t = 5.00 ms t = 5.31 ms t = 5.63 ms t = 5.94 ms Figure 7.2 (continued) Based on the images in Fig. 7.2 it can be seen that at least one cavity is generating vapor bubbles on the shallow slope of the wafer, specifically the second from the left. Initially, the bubble departs the cavity normal to the surface as seen in the low subcooling case. However, during collapse, the bubble is seen moving to the right at a very high speed with very little upward component. In fact, in some instances the bubble actually traveled to the right with a slight downward component (specifically at 4.69 ms). This behavior was unanticipated, and the cause was not understood at the time of the experiment. However, the bubble did not continue at such a high speed indefinitely; after it traveled to just past the crest of the adjacent ratchet, it slowed down quickly and was carried upward and to the right in a continuous plume of small slow-moving bubbles. This plume still moved to the right at an angle that was closer to horizontal than the bubble departure direction. It was believed that the bubbles in the plume were merely carried along by the movement of the surrounding liquid; this was hypothesized by observing the motion of thermally-induced density gradients in the plume. There was some indication that cavities as active as the one pictured in Fig. 7.2 108 existed on other areas of the test section, but the surrounding bubbles and temperature gradients made it difficult to resolve any bubbles that could be tracked by the algorithm. Because not all cavities behaved the same way, a microscope image of each cavity was taken to determine what, if any, differences there existed between each of them (Fig. 7.3). 250 μm Figure 7.3: Microscope pictures of each cavity in the test section. The diagram shows the orientation of the cavities as well as the viewing direction for the high-seed camera (i.e. row “a” is in the foreground, row “d” is in the background). Cavity 2a exhibited by far the greatest lateral motion of any of the cavities. For reference, the thin-film heater traces lay directly underneath the cavities on the opposite side of the wafer. 109 It can clearly be seen that obvious differences exist between some of the cavities. First of all, it must be noted that the intended geometry was achieved for most of the cavities on the test section. However, there exist a number of cavities in rows 1, 2, and 3 that did not feature the designed geometry. For these cavities, the gold and tin solder wicked up into the cavity and in some cases, particularly for cavities 1b, 2a, 2d, 3a, and 3d, filled the cavity almost entirely. What is perhaps most surprising is that cavities 2a and 3a correspond to the cavities that produced the well-resolved departure behavior in Fig. 7.1, and cavity 2a produced the noticeable collapse, and acceleration behavior observed in Fig. 7.2, whereas no such behavior was confirmed for any non-defective cavities. An additional note regarding cavity 2a is that the top layer of the gold and tin solder appeared to be horizontal whereas it appeared coplanar with the face of the ratchet for the other filled cavities. This was concluded by observing the focus of the microscope image as it varied along the face of the ratchet due to the narrow depth of field (Fig. 7.3). The texture of the gold-tin solder surface appeared in focus with the lower edge of the cavity mouth, indicating the cavity geometry may well resemble the geometry shown in Fig. 7.4. Nevertheless, this geometry cannot be accurately confirmed. It is also unclear as to why bubbles emanating from the non-defective cavities did not depart with a lateral velocity component. Figure 7.4: Geometry for cavity 2a construed from a microscope image (Fig. 7.3). During the bonding process the gold and tin solder used to bond the test section to the wafer was wicked up into the cavity up to the lower edge of the cavity mouth. 7.2. Bubble Kinematics Using the bubble tracking algorithm described in Section 6.1, the velocity and diameter were computed for each of the three tests. Because the labels on the bubble regions greatly 110 obscure the vectors and bubble shapes, the velocity field is presented without labels (Fig. 7.5 and 7.6). For each test, a corresponding set of labeled velocity fields can be found in Appendix E. As stated previously, the length of the velocity vectors shown in this section do not linearly correspond to the bubble speed; the length of the vectors was set proportional to the square root of the bubble speed to prevent any absurdly large vectors from cluttering the image, and making shorter vectors more visible. Also as stated previously, bubbles could not be resolved until after departure from the surface. The uncertainty for all diameter measurements and velocity magnitudes presented in this section is nominally ± 3.95% with a maximum of ± 17.21% near the upper-right hand corner of the images; vector direction uncertainty is nominally ± 1.1° with a maximum of ± 4.5° as determined in Section 6.2.4. 7.2.1. Test 1 – Low Subcooling As the majority of the bubbles seen during this experiment were quite large in comparison to the high subcooling experiment, not much can be observed in regard to the flow of the liquid, as buoyancy forces are quite large and carried the bubbles upward rapidly. The number of vectors resolved is therefore quite small. 111 Figure 7.5: Bubble velocity field at low subcooling (Test 1). The velocity vectors are proportional to the square root of the velocity of the bubble. q” applied = 1.96 ± 0.13 W/cm2; ΔTsub= 4.9 ± 0.3°C; Δt = 312.5 µs; exposure time = 40 µs; Aperture 100% open; field of view = 8.61 mm x 5.38 mm; = 24°. 112 t = 0.00 ms t = 0.31 ms t = 0.63 ms t = 0.94 ms t = 1.25 ms t = 1.56 ms Figure 7.5 (continued) 113 t = 1.88 ms t = 2.19 ms t = 2.50 ms t = 2.81 ms t = 3.13 ms t = 3.44 ms Figure 7.5 (continued) 114 t = 3.75 ms t = 4.06 ms t = 4.38 ms t = 4.69 ms t = 5.00 ms t = 5.31 ms Figure 7.5 (continued) 115 t = 5.63 ms t = 5.94 ms Figure 7.5 (continued) The departure diameter of the bubbles in Test 1 was typically resolved to be 0.70 mm, and left the cavity with velocities in the range of 100-250 mm/s; the resolved velocity varied greatly from frame to frame for bubbles just leaving the surface. The unsteady velocity was attributed to the strong oscillations in the bubble surface caused by detachment or coalescence with another bubble emanating from the cavity (Fig. 7.1 from t = 3.75 ms to t = 5.31 ms). These strong oscillations occurred in three dimensions and made centroid estimation unreliable. The frequency of bubble departure was also difficult to determine as some bubbles emanating from a cavity would coalesce with a bubble that had already departed from the surface. After departing the surface the bubbles tended to collapse and accelerate over the course of 9 ms. The bubble leaving the cavity consistently demonstrated a velocity normal to the 24° ratchet face until it began collapsing. During and after collapse, the bubble did not demonstrate consistent speed or direction. 7.2.2. Test 2 – High Subcooling Because of the radically different behavior between the bubbles departing the cavities and those in the plume over the test section, the bubbles in the plume are discussed separately from the bubbles just departing the cavity. Additionally, the mean horizontal component of the plume velocities was computed to provide insight into the flow generated over the test section. 116 Figure 7.6: Bubble velocity field at high subcooling (Test 2). q”applied = 18.94 ± 1.26 W/cm2; ΔTsub= 20.0 ± 0.3°C; Δt = 312.5 µs; exposure time = 40 µs; Aperture 100% open; field of view = 8.71 mm x 5.44 mm; = 24°. 117 t = 0.00 ms t = 0.31 ms t = 0.63 ms t = 0.94 ms t = 1.25 ms t = 1.56 ms Figure 7.6 (continued) 118 t = 1.88 ms t = 2.19 ms t = 2.50 ms t = 2.81 ms t = 3.13 ms t = 3.44 ms Figure 7.6 (continued) 119 t = 3.75 ms t = 4.06 ms t = 4.38 ms t = 4.69 ms t = 5.00 ms t = 5.31 ms Figure 7.6 (continued) 120 t = 5.63 ms t = 5.94 ms Figure 7.6 (continued) The bubble departing the cavity is discussed first. The departure diameter of this bubble is consistently resolved to be between 0.66 and 0.71 mm, and left the cavity with velocities in the range of 170-200 mm/s. Though the bubble grew in a direction normal to the face of the 24° ratchet face, as soon as it detached from the surface, it would collapse and rapidly accelerate to the right to speeds as high as 906 mm/s (Fig. 7.6 from t = 3.13 ms to t = 4.38 ms). Even higher speeds are believed to be achieved by these bubbles as the distance traveled per time interval increased beyond the distance that produced the 906 mm/s value, but the small size, high speed, and density gradients made the bubble difficult to resolve by the algorithm. These high velocities prevented any bubbles near the cavity from coalescing, and allowed the departure frequency to be measured. Fortunately, the frame rate of the camera (3200 frames per second) was an integer multiple of the departure frequency, as every 10 frames showed each subsequent bubble in the exact same state of nucleation or departure as the preceding bubble. The departure frequency was therefore determined to be 320 Hz. Once the bubbles fully collapsed and traveled across the crest of the adjacent ratchet, they slowed down rapidly to speeds around 200 mm/s (Fig. 7.6 t = 5.94 ms), after which they would turn upwards and were carried away by the plume, gradually slowing to speeds in the range of 30-60 mm/s. The bubbles resolved in the plume moved at a mean horizontal velocity of 25 mm/s. The bubbles traveled at this speed and direction for their duration in the field of view. A direct visual observation during experiments indicated that the plume continued in this direction well outside the camera’s field of view. The maximum 121 tangential acceleration experienced by a bubble during its collapse was recorded to be 127g (Fig. 7.6 from t = 4.38 ms to t = 5.00 ms), whereas a maximum deceleration of -167g occurred after the bubble collapsed and crossed the crest of the adjacent ratchet (Fig. 7.6 from t = 3.44 ms to t = 4.06 ms). Acceleration was manually calculated as ⁄ for two consecutive frame pairs 7.3. Repeatability A third test was performed 58 days following tests 1 and 2 to demonstrate repeatability of the experiment. This test was performed at the same subcooling as Test 2 ( = 20.0°C) but with a lower applied heat flux of 14.52 W/cm2 (Fig. 7.2). Two things must be noted regarding this test: although the supplied current was greater than the current supplied for Test 2, the voltage was much lower. This decrease in voltage was due to a repair of a severed trace on the test section’s thin-film heater; Colloidal Silver Liquid (Ted Pella Prod. No. 16031) was applied over the trace to complete the circuit, but the reduced resistance in that area of the heater resulted in a reduced the voltage relative to its previous condition for the same current. Secondly, despite cleaning procedures the test section became more susceptible to stagnant bubbles around its perimeter, making it more difficult to resolve events occurring between the ratchets (Fig. 7.7). 122 Figure 7.7: Sequence of 20 frames at low subcooling to demonstrate repeatability of the experiment (Test 3) 58 days after Tests 1 and 2. q”applied = 14.52 ± 0.97 W/cm2; ΔTsub= 20.0 ± 0.3°C; Δt = 188.68 µs; exposure time = 40 µs; Aperture 100% open; field of view = 8.14 x 4.85 mm; = 24°. 123 t = 0.00 ms t = 0.19 ms t = 0.38 ms t = 0.57 ms t = 0.75 ms t = 0.94 ms t = 1.13 ms t = 1.32 ms Figure 7.7 (continued) 124 t = 1.51 ms t = 1.70 ms t = 1.89 ms t = 2.08 ms t = 2.26 ms t = 2.45 ms t = 2.64 ms t = 2.83 ms Figure 7.7 (continued) 125 t = 3.02 ms t = 3.21 ms t = 3.40 ms t = 3.58 ms Figure 7.7 (continued) Though the bubbles emerging from the cavities are too distorted to be resolved by the algorithm, the observed behavior remains the same (i.e. bubbles accelerate to the right during collapse, and decelerate once across the crest of the adjacent ratchet). The departure frequency was determined to be roughly 570 Hz, much higher than that observed in test 2. The Also, the plume can provide some indication of the fluid motion generated by the test section such that the behavior of the plume in test 3 can be compared to that of the plume in test 2. In general, the small collapsed bubbles in the pool over the test section still move in a definite right-hand direction, at an angle farther to the right than merely normal to the 24° ratchet face. Similar to test 2, this plume of small bubbles originates from roughly the same area over the test section. Because the plume does exhibit behavior similar to the plume in test 2 despite the reduced heat flux, repeatability of the experiment was demonstrated (Fig. 7.8). 126 Figure 7.8: Sequence of 20 frames at high subcooling to demonstrate repeatability of the experiment (Test 3) 58 days after Tests 1 and 2. q”applied = 14.52 ± 0.97 W/cm2; ΔTsub= 20.0 ± 0.3°C; Δt = 188.68 µs; exposure time = 40 µs; Aperture 100% open; field of view = 8.14 x 4.85 mm; = 24°. 127 t = 0.00 ms t = 0.19 ms t = 0.38 ms t = 0.57 ms t = 0.75 ms t = 0.94 ms Figure 7.8 (continued) 128 t = 1.13 ms t = 1.32 ms t = 1.51 ms t = 1.70 ms t = 1.89 ms t = 2.08 ms Figure 7.8 (continued) 129 t = 2.26 ms t = 2.45 ms t = 2.64 ms t = 2.83 ms t = 3.02 ms t = 3.21 ms Figure 7.8 (continued) 130 t = 3.40 ms t = 3.58 ms Figure 7.8 (continued) Though the bubbles emerging from the cavities are too distorted to be resolved by the algorithm, the bubbles in the plume were successfully tracked and revealed continuous bubble velocities in the range of 30-70 mm/s, confirming the repeatability of the experiment. The higher departure frequency is possibly explained by the smaller departure diameter. Although the departure diameter was not resolved by the algorithm, it was estimated for Fig. 7.7 (specifically at t = 0.19 ms, t = 1.89 ms, t = 3.58 ms) by manually determining the most appropriate equivalent diameter of the bubble. The estimated departure diameter for the bubble leaving the cavity in test 3 was between 0.41 and 0.45 mm. 7.4. Force Balance Because the performance of cavity 2a has been well-quantified, the focus of this remaining discussion will pertain to the possible flow mechanisms driving the bubbles that nucleate and depart from this cavity. As discussed in Section 2.2, a number of forces exist on a bubble during the growth and departure phase. The following analysis will attempt to estimate the net momentum imparted on the fluid by the growth and departure of a single bubble. Additionally, an attempt is made at characterizing the forces that cause the high acceleration of the collapsing bubble in subcooled conditions. Figure 7.9 shows a qualitative representation of the force imparted on the bubble’s liquid-vapor interface as a result of growth. 131 Figure 7.9: Growth of the bubble normal to the surface imparts a net momentum on the fluid. Using Eq. 2.9 the total momentum imparted on the fluid during one growth and phase can be computed discretely for each time step. However, because of the cavity, the contact diameter remains fixed and the bubble is assumed to be spherical for the majority of its growth such that the drag coefficient can be assumed to be that of a sphere. This assumption in turn means that this equation is only reasonable when ( . (7.1) ) As the calculated bubble growth rate is an average between two frames, the diameter was estimated as the average diameter between the same two frames. The Reynolds number which was used to determine the drag coefficient [41] was a function of the average diameter and growth rate of the bubble: ̅ ∑ ̅̅̅̅ ( ) ( ) (7.2) There are 28 cavities on the test section, each located on 1/28 of the total test section area . The momentum ̅ from Eq. 7.2 is assumed to be imparted on a control volume whose cross-sectional area corresponds to 1/28 of the projected test section area (Fig. 7.10). 132 Figure 7.10: Control volume for estimation of liquid plume velocity as it depends on the momentum imparted on the fluid during one bubble growth cycle A momentum balance can be performed on the control volume as follows ̅ ̅ ( ( ) ̅ )( ̅ ) (7.3) Rearranging Eq. 7.3 and substituting Eq. 7.2 leads to a conservative estimate of ̅ : ̅ √ ( ) ∑ ̅̅̅̅ ( ) ( ) (7.4) In order to compute the liquid velocity as a result of the momentum imparted during one growth cycle, the diameters of the bubbles are recorded for each frame up to departure. Because the bubbles are still attached to the surface during this phase, the algorithm was unable to resolve it, and the bubble diameters were determined manually by counting the number of pixels and converting to mm. Table 7.2 shows the estimated diameters from bubbles emanating from cavity 2a in Fig. 7.1 (from t = 1.88 ms to t = 4.38 ms) and Fig. 7.2 (from t = 1.25 ms to t = 2.50 ms). 133 Table 7.2: Bubble diameter during growth before departure. Data is shown for low subcooling based on Fig. 7.1 (from t = 1.88 ms to t = 4.38 ms) and high subcooling based on Fig. 7.2 (from t = 1.25 ms to t = 2.50 ms). Low Subcooling Time [ms] d [mm] 1.88 0.19 2.19 0.36 2.50 0.43 2.81 0.47 3.13 0.52 3.44 0.53 3.75 0.56 4.06 0.59 4.38 0.59 High Subcooling Time [ms] d [mm] 1.25 0.40 1.56 0.69 1.88 0.80 2.19 0.81 2.50 0.82 In low subcooling, using Eq. 7.4, the liquid velocity normal to the 24° face of the ratchet was estimated to be 17 mm/s. Because the strong jets developed by these growing bubbles are normal to the 24° face, there is a component of the jet in the horizontal direction, specifically 7 mm/s. In high subcooling, the liquid velocity normal to the 24° face was estimated to be 45 mm/s with a horizontal component of 18 mm/s. These values can be compared to the plume flow if the velocity of the bubbles matches the velocity of the surrounding liquid as was hypothesized earlier in this chapter. To confirm this, the Stokes number was calculated using the bubble time constant [42] and a flow time constant based on the diameter of the bubble: (7.5) For resolved bubble velocities of 30-70 mm/s, and a conservative diameter of 0.1 mm, the Stokes number is 3.5x10-4-8.2x10-4. Because <<1 for the entire range, bubbles are assumed to follow the flow very well, meaning the resolved bubble velocities are very close to the plume velocity. The relatively close match between velocities of the bubbles in the plume in Fig. 7.6 (30-60 mm/s with a mean horizontal component of 25-35 mm/s) and those calculated using Eq. 7.4 (45 mm/s with a horizontal component of 18 mm/s), suggests this may actually be the driving mechanism for the plume flow. However, for the low subcooling case, the lack of any trackable bubbles in the location where the plume would be expected thwarts any attempt at comparing the model to data. 134 The second flow mechanism considered is that which drives the bubbles to the right at such a high acceleration. Figure 7.11 shows a possible reason for the observed behavior. Because of the high subcooling conditions, thermal gradients exist over the test section, and have been observed to look similar to those pictured in Fig. 7.11 (indicated by the different shades and small arrows). Figure 7.11: Preliminary reasoning for observed behavior of bubbles in subcooled conditions. During collapse, thermal gradients (indicated by shading and small arrows) cause Marangoni convection that pushes the bubbles in the direction of increasing temperature. As described in Section 2.2, Marangoni flow around a bubble travels from regions of low surface tension (high temperature) to regions of high surface tension (low temperature). In the case where a bubble has detached from the surface, this jet can propel the bubble in the direction of increasing liquid temperature. As the bubble detaches normal from the surface and travels to the right, it encounters a relatively sharp temperature gradient. This gradient facilitates Marangoni flow to propel the bubble in this direction. A force balance is set up to determine if this is a possible cause for the observed behavior. The forces considered are that due to Marangoni flow (Eq. 2.5), and the drag force associated with the bubble’s speed (Eq. 2.8): (7.6) ( )( ) ( ) (7.7) 135 ⁄ Rearranging Eq. 7.7 and solving for yields ( )( (7.8) ) Equation 7.8 requires the velocity, acceleration, and diameter of the near-cavity bubble, which was determined from Fig. 7.6 (t = 0.00 ms to t = 3.13 ms) and summarized in Table 7.3. Table 7.3: Bubble accelerations calculated to determine if Marangoni flow plays a role in the strong acceleration of bubbles immediately after departure. Data obtained from Fig. 7.6 (t = 3.13 ms to t = 5.00 ms). Time [ms] 3.13 3.44 3.75 4.06 4.38 4.69 5.00 Diameter [mm] 0.65 0.53 0.50 0.39 0.27 0.12 0.10 Speed [mm/s] Tangential Acceleration [g] 171 3 127 34 75 -167 181 571 675 902 394 Equation 7.8 was used to determine the necessary temperature gradient to produce the +127g and -167g accelerations shown in Table 7.3, all properties were assumed to be of water at saturation temperature ( [ ⁄ ⁄ [ ⁄ ], [ ⁄ ], ]). During the +127g acceleration, the bubble was moving at an average speed of 376 mm/s (Re = 639 [41]; CD = 0.53). To effect such acceleration at this speed, a temperature gradient of 903°C/mm would need to exist in the direction of the bubble velocity. During the -167g acceleration, the bubble was moving at an average speed of 650 mm/s (Re = 265 [41]; CD = 0.72). To effect such acceleration at this speed, a temperature gradient of 42°C/mm would need to exist in the direction of the bubble velocity, as drag alone would cause an even greater acceleration. These hypothetical temperature gradients (the 903°C/mm value in particular) are unrealistic for the conditions imposed, and as such the accelerations observed during collapse of the departed bubble are not due to Marangoni flow alone, leaving questions for future investigation. 136 8. CONCLUSIONS The hypothesis for this thesis work was that heat applied to an asymmetrically structured surface could generate fluid motion parallel to the surface in the nucleate boiling regime. The results presented in Chapter 7 clearly show that thermally actuated lateral flow was demonstrated in the nucleate boiling regime, and that it was repeatable. At a high subcooling of 20°C and a heat flux of 14-18 W/cm2, bubble tracking resolved large plume velocities in the range of 30-70 mm/s, with a mean horizontal component between 25 and 35 mm/s. These values correlated fairly well with the predicted velocities obtained from a conservative semi-empirical momentum balance model based on the drag induced by growing bubbles on the surrounding fluid. In lower subcooling conditions, substantial lateral flow was not observed as there were no small bubbles present to track the flow. However, extrapolating the from the bubble diameters during growth, plume velocities were predicted to be in the range of 17 mm/s. It must be noted that these plume flows, as best can be deduced from the data, were produced by only one or two active cavities on the test section, indicating that much higher plume velocities may have been achieved if all cavities were active. Also, the fact that the only active cavities were those with severe manufacturing defects indicates that for the conditions studied, the designed cavity geometry was not ideal, and perhaps required a greater heat flux to be active than that which could be provided by the thin-film heater. The chamber and experimental facility procured for this work have proven extremely reliable, effective, and user-friendly. The electrical connections and control panel worked without fail, the custom LED array proved invaluable in creating a bright and uniformly backlit image for the high-speed camera, allowing for exposure times as low as 40 µs, and with all modules securely mounted to the aluminum rack, the repeatability of experimental conditions was easily met. The silicon wafer holder securely mounted the fragile test section in the chamber in any of three orientations, while maintaining an excellent seal and providing an unobstructed side view for the high-speed camera. The ability for the facility to trigger the camera as well as temperature data acquisition using the experimental facility’s accelerometer greatly improves the probability that data can be acquired in a microgravity environment, even if these conditions exist for only a few seconds at a time, as no user 137 action is required to trigger data acquisition when this mode is enabled; this indicates that the experimental facility should perform well when flying parabolic arcs, capturing data only when microgravity conditions exist. Additionally, the chamber demonstrated its ability to accommodate Particle Image Velocimetry, Laser-Induced Fluorescence, and infrared thermography measurement techniques, which could be employed in follow-up work or in other experiments that use this facility. The bubble tracking algorithm demonstrated its ability to track bubbles reliably for a variety of experimental conditions, providing valuable bubble velocity, acceleration and diameter data that could be compared with semi-empirical models. Vector plots were presented in a clear and intuitive manner, providing an instantaneous glimpse of the bubble behavior near the test section, and the flow of the plume over the test section. In fact, the algorithm successfully resolved velocities as high as 1 m/s and accelerations as high as 167g. Although experiments were performed with FC-72, no data was reported as FC-72 was highly susceptible to creating a greatly distorted image over the heated test section in high subcooling conditions, particularly near the surface, which made bubble tracking extremely difficult. 138 9. RECOMMENDATIONS FOR FUTURE INVESTIGATION As the plume velocity in the subcooled case was attributed primarily to the drag induced on the fluid during bubble growth on the sloped ratchet face, future designs should focus on generating favorable nucleation sites on this face without creating complex reentrant cavities, as the process to create these resulted in high cost and long procurement times for the test section. The algorithm should also be improved to resolve the diameters of bubbles still attached to the surface, as this will greatly increase the precision of the induced drag calculations, which in turn will predict the performance more accurately. The test section should be more durable and have the capability for greater heat fluxes than those that can be provided by a thin-film heater. As gravitational dependence has not yet been studied, a number of experiments should be performed in the vertical orientation as well as in microgravity. As part of preparation for these experiments, the experimental facility should be outfitted to fully comply with the appropriate microgravity flight experimental facility regulations. Such additions will likely include a double containment barrier around the chamber, an accumulator to accommodate excess vapor generated without causing an increase in pressure, and a single emergency power disconnect switch for all systems. As a precaution, a pressure transducer should be included to monitor chamber pressure in the event of a failure of the accumulator or other systems. The power supply that will power the test section should also be fixed to the experimental facility. Further upgrades to the facility should include: Stirrer to thoroughly mix the pool to insure no temperature gradients exist prior to data acquisition. High capacity filter with pore size less than 10 µm as the current filter requires flushing prior to each experiment. Calibration of the accelerometer should be performed. At the time of the writing of this thesis no precise calibration had been performed because it was not required for the work presented. The accelerometer was powered directly from the experimental facility power supply, and supply voltage changed slightly whenever any other 139 system connected to the power supply was switched on or off (primarily the pump or LED array). Since the accelerometer implemented was an analog device, the output voltage was directly affected by the input voltage. If active cooling of the pool becomes necessary, a thermoelectric cooling device should be used to maintain compliance with the relevant experimental facility requirements for flight experiments. 140 REFERENCES [1] Incropera F. P., DeWitt D. P., Bergman T. L., and Lavine A. S., 2006, Introduction to Heat Transfer, John Wiley & Sons, Hoboken, NJ, pp. 860 [2] Wolf D. H., Incropera F. P., and Viskanta R., 1993, “Jet Impingement Boiling,” Elsevier, pp. 1-132. [3] Grover G. M., Cotter T. P., and Erickson G. F., 1964, “Structures of Very High Thermal Conductance,” J. Appl. Phys., 35(6), p. 1990. [4] Vasiliev L. L., 2005, “Heat pipes in modern heat exchangers,” Applied Thermal Engineering, 25(1), pp. 1-19. [5] Birur G. C., and O’Donnell T. P., 2001, “Advanced thermal control technologies for space science missions at Jet Propulsion Laboratory,” AIP Conference Proceedings, Albuquerque, NM, pp. 263-270. [6] Watts B. D., 2001, The Military Use of Space: A Diagnostic Assessment, Center for Strategic and Budgetary Assessments, Washington, DC. [7] Incropera F. P., DeWitt D. P., Bergman T. L., and Lavine A. S., 2006, Introduction to Heat Transfer, John Wiley & Sons, Hoboken, NJ, pp. 587-588. [8] Carey V. P., 2007, Liquid-vapor phase-change phenomena: an introduction to the thermophysics of vaporization and condensation processes in heat transfer equipment, Taylor and Francis. [9] Wu W., Bostanci H., Chow L. C., Hong Y., Su M., and Kizito J. P., 2010, “Nucleate boiling heat transfer enhancement for water and FC-72 on titanium oxide and silicon oxide surfaces,” International Journal of Heat and Mass Transfer, 53(9-10), pp. 1773-1777. [10] Zhang N., and Chao D. F., 1999, “Models for enhanced boiling heat transfer by unusual Marangoni effects under microgravity conditions,” International Communications in Heat and Mass Transfer, 26(8), pp. 1081-1090. [11] Wang H., Peng X., Garimella S. V., and Christopher D. M., 2007, “Microbubble return phenomena during subcooled boiling on small wires,” International Journal of Heat and Mass Transfer, 50(1-2), pp. 163-172. [12] Zeng L., Klausner J., and Mei R., 1993, “A Unified Model for the Prediction of Bubble Detachment Diameters in Boiling Systems. 1. Pool Boiling,” International Journal of Heat and Mass Transfer, 36(9), pp. 2261-2270. [13] Lee H., Merte H., and Chiaramonte F., 1997, “Pool boiling curve in microgravity,” Journal of Thermophysics and Heat Transfer, 11(2), pp. 216-222. [14] Lee H., 2002, “Mechanisms of steady-state nucleate pool boiling in microgravity,” Microgravity Transport Processes in Fluid, Thermal, Biological, and Materials Sciences, 974, pp. 447-462. 141 [15] Ohta H., 1997, “Experiments on microgravity boiling heat transfer by using transparent heaters,” Nuclear Engineering and Design, 175(1-2), pp. 167-180. [16] Kim J., and Benton J., 2002, “Highly subcooled pool boiling heat transfer at various gravity levels,” International Journal of Heat and Fluid Flow, 23(4), pp. 497-508. [17] Straub J., 1999, “Physics of boiling and bubble dynamics with and without gravity: Conclusions of space experiments,” Inorganic Materials, 35(6), pp. 615-621. [18] Merte H., 2004, “Momentum effects in steady nucleate pool boiling during microgravity,” Transport Phenomena in Microgravity, 1027, pp. 196-216. [19] Das A. K., Das P. K., and Saha P., 2009, “Performance of different structured surfaces in nucleate pool boiling,” Applied Thermal Engineering, 29(17-18), pp. 3643-3653. [20] Das A. K., Das P. K., and Saha P., 2010, “Some investigations on the enhancement of boiling heat transfer from planer surface embedded with continuous open tunnels,” Experimental Thermal and Fluid Science, 34(8), pp. 1422-1431. [21] Chyu M. C., and Fei J., 1991, “Enhanced Nucleate Boiling in an Angular Geometry Found in Structured Surfaces,” International Journal of Heat and Mass Transfer, 34(2), pp. 437448. [22] Liter S. G., and Kaviany M., 2001, “Pool-boiling CHF enhancement by modulated porouslayer coating: theory and experiment,” International Journal of Heat and Mass Transfer, 44(22), pp. 4287-4311. [23] Stroock A. D., Ismagilov R. F., Stone H. A., and Whitesides G. M., 2003, “Fluidic Ratchet Based on Marangoni−Bénard Convection,” Langmuir, 19(10), pp. 4358-4362. [24] Jo M. C., 2008, “Thermally actuated pumping of a single-phase fluid using surface asymmetry,” Thesis, Oregon State University. [25] Linke H., Alemán B. J., Melling L. D., Taormina M. J., Francis M. J., Dow-Hygelund C. C., Narayanan V., Taylor R. P., and Stout A., 2006, “Self-Propelled Leidenfrost Droplets,” Phys. Rev. Lett., 96(15), p. 154502. [26] Ok J., Lopez-Ona E., Nikitopoulos D., Wong H., and Park S., 2011, “Propulsion of droplets on micro- and sub-micron ratchet surfaces in the Leidenfrost temperature regime,” MICROFLUIDICS AND NANOFLUIDICS, 10(5), pp. 1045-1054. [27] Incropera F. P., DeWitt D. P., Bergman T. L., and Lavine A. S., 2006, Introduction to Heat Transfer, John Wiley & Sons, Hoboken, NJ, pp. 587-588. [28] Watts B. D., 2001, The Military Use of Space: A Diagnostic Assessment, Center for Strategic and Budgetary Assessments, Washington, DC. [29] Brusstar M., and Merte H., 1994, “Effects of Buoyancy on the Critical Heat-Flux in Forced-Convection,” Journal of Thermophysics and Heat Transfer, 8(2), pp. 322-328. [30] Zhang H., Mudawar I., and Hasan M. M., 2004, “A Method for Assessing the Importance of Body Force on Flow Boiling CHF,” J. Heat Transfer, 126(2), pp. 161-168. [31] 2006, “Zero Gravity Research Facility,” NASA Glenn Research Center, Cleveland, OH. [32] 2008, “2.2 Second Drop Tower,” NASA Glenn Research Center, Cleveland, OH. 142 [33] 2010, “Black Brant XII Launch Vehicle (40.XXX),” NASA Goddard Space Flight Center, Wallops Island, VA [34] 2007, “Experiment Design Requirements and Guidelines NASA 932 C-9B (AOD 33897),” NASA NASA Lyndon B. Johnson Space Center, Houston, TX [35] 2010, “Review of NASA’s Microgravity Flight Services,” NASA Office of Inspector General, Washington, DC. [36] Kim J., and Benton J., 2002, “Highly subcooled pool boiling heat transfer at various gravity levels,” International Journal of Heat and Fluid Flow, 23(4), pp. 497-508. [37] 2007, “Interface Control Document NASA 932 C-9B (AOD 33912),” NASA Lyndon B. Johnson Space Center, Houston, TX [38] Straub J., 1999, “Physics of boiling and bubble dynamics with and without gravity: Conclusions of space experiments,” INORGANIC MATERIALS, 35(6), pp. 615-621. [39] 2007, “Experiment Design Requirements and Guidelines NASA 932 C-9B.” [40] “Refractive index for various materials.” [41] “drag on a sphere - Wolfram|Alpha.” [42] Adrian R. J., and Westerweel J., 2010, Particle Image Velocimetry, Cambridge University Press. 143 APPENDICES 144 Appendix A. Derivation of Marangoni Flow Reaction Force The following is a derivation of the reaction force on a bubble due to Marangoni flow based on the shear stress on the liquid vapor interface. ( ( [ [ ( )( )( )( ) (A.1) ( ) (A.2) ) ( )( )( ( ) ( ) ) )∫ (A.3) ( ) ] ( )] [ ) ( ) ( )( ⁄ ( ) ][ ( )] (A.4) (A.5) (A.6) ⁄ ( ( )( )( ) ) (A.7) (A.8) 145 Appendix B. Experimental Procedures Specific to FC-72 B.1. Cleaning the Chamber After rinsing the chamber with deionized water, both the fill and drain fluid loop were blown out using filtered compressed air and the chamber was left to dry for at least 12 hours to insure that water did not contaminate the experiment. B.2. Filling and Degassing The syphoning procedure was not performed as the low viscosity allowed the pump to draw it from the reservoir without trouble. A 7-micron filter was used as the low viscosity allowed a smaller pore size. The PID controller set temperature for degassing was set above 57°C. 146 Appendix C. Bubble Tracking Algorithm In this appendix a flow chart showing the scripts used in the algorithm is presented, along with the actual Matlab® M-files (not all scripts used are included in the flow chart) Velocity_Track.m Define image file to use Define recording parameters Initialize Image Processing Variables Call Bubble_Filter.m to resolve bubbles as distinct binary regions Velocity_Track.m (after Bubble_Filter.m) Call Delete_Incompletes.m to delete regions not representative of a bubble Velocity_Track.m (after Delete_Incompletes.m) Perform intensity-weighted centroid calculations on remaining regions Call PTV.m Delete_Multiples.m Determine any overlapping region pairs Identify pair with longer centroid-centroid distance Velocity_Track.m Plot velocity vectors Annotate plot with information identified at top of script Bubble_Filter.m Create Gradient, Laplace, Sobel filter masks Apply masks to image Binarize image Remove very small regions Fill hollow regions (2X) Remove small regions Clear image border regions Outline regions on original image Delete_Incompletes.m Delete regions w/ low solidity Delete regions w/ high eccentricity Tag remaining regions light yellow PTV.m Compute all possible bubble centroid-centroid distances for each region in first image to all regions in the second image. Identify pairs with shortest distances between the two images as bubble pairs Call Delete_Multiples.m to delete pairs that reference the same image PTV.m (after Delete_Multiples.m) Identify bubble pairs with greatly mismatched area ratios. Remove all regions identified from binary image to retain only valid bubble pairs. Create table with coordinates of bubble pairs Figure C.1: Flowchart for bubble tracking algorithm functions. 147 Appendix D. Data Analysis D.1. Thermocouple Calibration and Uncertainty Analysis The thermocouple probes were held in the center of the heater bath, still mounted in the circular chamber port cover. Keeping the thermocouples mounted ensured the probes would not shift during calibration. The NIST standard RTD probe (uncertainty 0.3°C) was inserted into the bath between the probes. Once the pool temperature stabilized, the NIST standard temperature was recorded manually and thermocouple readings were recorded at a rate of 2.4 Hz. A total of 100 data points were recorded for each probe at each temperature. At 95% confidence this equates to a student T-factor of 1.984. The uncertainty for each thermocouple was computed as function of the uncertainty due to the random error of sampling, curve fit error, and NIST bias error. The random sampling error for each data point was computed as √ where ̅ ) ∑( denotes the individual sample, and (D.1) denotes the individual data point. The maximum random sampling error of the ten data points was used as the global sampling error for the entire calibration range: ([ ] ) (D.2) The curve fit error was computed as the standard deviation of the fit error: √ ∑( ( ̅ ) ) (D.3) 148 where is the slope of the linear fit and the standard was included as is the y-axis intercept. Finally, the uncertainty of . The total uncertainty was computed as a root sum of squares: √( ) ( ) ( ) (D.4) The uncertainties for each probe including the total uncertainty are summarized in Table D.1; calibration curves are provided in Fig. D.1. Table D.1: Thermocouple uncertainty measurements and calibration curve constants. Values are presented for thermocouples both with and without extension cables. Probe Type Extension Slope TC0 K No 1.0034 TC1 K No 1.0026 TC2 K No 1.0024 TC3 K No 1.0032 TC0 K Yes 1.0038 TC1 K Yes 1.0030 TC2 K Yes 1.0028 TC3 K Yes 1.0037 Intercept -0.0969 -0.1557 -0.1527 -0.2171 -0.1082 -0.1701 -0.1735 -0.2505 0.0742 0.0307 0.0445 0.0431 0.0632 0.0305 0.0423 0.0412 0.0134 0.0131 0.0153 0.0143 0.0152 0.0147 0.0163 0.0156 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 0.3 149 Figure D.1: Calibration curves for each thermocouple. * denotes extension cable was used. 150 Figure D.1 (Continued) 151 D.2. Applied Heat Flux Heat flux applied to the silicon wafer by the thin film heater: (D.5) The total uncertainty in applied heat flux was estimated using the Kline and McClintock method: √( ) ( ) ( ) ( (D.6) ) Substituting Eq. D.5 in Eq. D.6 the uncertainty in applied heat flux becomes √( ) ( ) ( ) ( ) (D.7) Based on Eq. D.7 the uncertainty in the applied heat flux is calculated for each experimental condition discussed in this thesis (Table D.2). Table D.2: Uncertainty of applied heat flux due to uncertainties in heated surface area and applied power. Uncertainty for each experiment was computed using the Kline and McClinktock method. Heated area Heated area Current (A) Voltage (V) width (cm) length (cm) -5 -4 (W/cm2) Test U = ± 5x10 U = ± 5x10 U = ± 0.005 U = ± 0.005 1 3.000 7.458 0.93 1.27 18.94 ± 1.26 2 1.000 2.310 0.93 1.27 1.96 ± 0.13 3 3.150 5.444 0.93 1.27 14.52 ± 0.97 152 Appendix E. Annotated Vector Plots for Tests 1, 2, 3 The following labeled vector plots were used to obtain the quantitative velocity and diameter information for the data presented in Chapter 7. Labels show from top to bottom: bubble speed in mm/s, bubble equivalent diameter in mm, and estimated bubble volume in mm3. 153 Figure E.1: Labeled vector plots for Test 1. q”applied = 1.96 ± 0.13 W/cm2; ΔTsub= 4.9 ± 0.3°C; Δt = 312.5 µs; exposure time = 40 µs; Aperture 100% open; field of view = 8.61 mm x 5.38 mm; = 24°. 154 t = 0.00 ms t = 0.31 ms t = 0.63 ms t = 0.94 ms t = 1.25 ms t = 1.56 ms Figure E.1 (continued) 155 t = 1.88 ms t = 2.19 ms t = 2.50 ms t = 2.81 ms t = 3.13 ms t = 3.44 ms Figure E.1 (continued) 156 t = 3.75 ms t = 4.06 ms t = 4.38 ms t = 4.69 ms t = 5.00 ms t = 5.31 ms Figure E.1 (continued) 157 t = 5.63 ms Figure E.1 (continued) t = 5.94 ms 158 Figure E.2: Labeled vector plots for Test 2. q”applied = 18.94 ± 1.26 W/cm2; ΔTsub= 20.0 ± 0.3°C; Δt = 312.5 µs; exposure time = 40 µs; Aperture 100% open; field of view = 8.71 mm x 5.44 mm; = 24°. 159 t = 0.00 ms t = 0.31 ms t = 0.63 ms t = 0.94 ms t = 1.25 ms t = 1.56 ms Figure E.2 (continued) 160 t = 1.88 ms t = 2.19 ms t = 2.50 ms t = 2.81 ms t = 3.13 ms t = 3.44 ms Figure E.2 (continued) 161 t = 3.75 ms t = 4.06 ms t = 4.38 ms t = 4.69 ms t = 5.00 ms t = 5.31 ms Figure E.2 (continued) 162 t = 5.63 ms Figure E.2 (continued) t = 5.94 ms 163 Figure E.3: Labeled vector plots for Test 3. q”applied = 14.52 ± 0.97 W/cm2; ΔTsub= 20.0 ± 0.3°C; Δt = 188.68 µs; exposure time = 40 µs; Aperture 100% open; field of view = 8.14 x 4.85 mm; = 24°. 164 t = 0.00 ms t = 0.19 ms t = 0.38 ms t = 0.57 ms t = 0.75 ms t = 0.94 ms Figure E.3 (continued) 165 t = 1.13 ms t = 1.32 ms t = 1.51 ms t = 1.70 ms t = 1.89 ms t = 2.08 ms Figure E.3 (continued) 166 t = 2.26 ms t = 2.45 ms t = 2.64 ms t = 2.83 ms t = 3.02 ms t = 3.21 ms Figure E.3 (continued) 167 t = 3.40 ms Figure E.3 (continued) t = 3.58 ms 168 Appendix F. Part Drawings All parts were designed in SolidWorks, and were machined at Oregon State University with the exception of the stainless steel chamber. 169 Figure F.1: Assembly drawing of chamber. 170 Figure F.2: Drawing of chamber wall with laser port cutout and bolt flanges. 171 Figure F.3: Drawing of chamber wall with wafer holder port cutout and bolt flanges. 172 Figure F.4: Drawing of bottom chamber wall with wafer holder cutout. 173 Figure F.5: Drawing of top chamber wall with wafer holder cutout. 174 Figure F.6: Drawing of side chamber wall with window cutout and thru-holes for condensing equipment and cartridge heaters. 175 Figure F.7: Drawing of side chamber wall with window cutout. 176 Figure F.8: Drawing of window clamp. 177 Figure F.9: Drawing of circular port cover. 178 Figure F.10: Drawing of laser port used for experiments in the vertical orientation. 179 Figure F.11: Assembly drawing of laser port used for experiments in the upright and inverted orientation. 180 Figure F.12: Drawing of base flange for laser port. 181 Figure F.13: Drawing of side wall of laser port. 182 Figure F.14: Drawing of bottom wall for laser port. 183 Figure F.15: Drawing of top wall for laser port. 184 Figure F.16: Drawing of window mounting plate for laser port. 185 Figure F.17: Bracket for mounting the rotational platform for the prism to the laser port. 186 Figure F.18: Drawing of wafer holder. 187 Figure F.19: Drawing of wafer clamp. 188 Figure F.20: Drawing of arms used to support the high-speed camera. 189 Figure F.21: Drawing of high-speed camera mounting plate. 190 Figure F.22: Drawing of high-speed camera lens support bracket.