Cost Sensitive Reachability Heuristics for Handling State Uncertainty
advertisement

Cost Sensitive Reachability Heuristics for Handling State Uncertainty
Daniel Bryce & Subbarao Kambhampati
Department of Computer Science and Engineering
Arizona State University, Brickyard Suite 501
699 South Mill Avenue, Tempe, AZ 85281
{dan.bryce, rao}asu.edu
Abstract
While POMDPs provide a general platform for
non-deterministic conditional planning under a
variety of quality metrics they have limited scalability. On the other hand, non-deterministic conditional planners scale very well, but many lack
the ability to optimize plan quality metrics. We
present a novel generalization of planning graph
based heuristics that helps conditional planners
both scale and generate high quality plans when
using actions with non-uniform costs. We make
empirical comparisons with two state of the art
planners to show the benefit of our techniques.
1
Introduction
When agents have uncertainty about their state, they need
to formulate conditional plans, which attempt to resolve
state-uncertainty with sensing actions. This problem has
received attention in both the uncertainty in AI (UAI) and
automated planning communities. From the UAI perspective, finding such conditional plans is a special case of
finding policies for Markov Decision Processes (MDPs) in
the fully observable case, and Partially Observable MDPs
(POMDPs) in the partially observable case. The latter is of
more practical use, although much harder computationally
[Madani et al., 1999; Littman et al., 1998]. The emphasis in this community has been on finding optimal policies
under fairly general conditions. However the scalability of
the approaches has been very limited. In the planning community, conditional planning has been modelled as search
in the space of uniform probability belief states (i.e. every belief state is a set of equally possible states and the
space is finite). Several planners have been developed–eg.
MBP [Bertoli et al., 2001], and PKSPlan [Petrick and Bacchus, 2002] – which model conditional plan construction
as an and/or search. These approaches are more scalable
partly because their complexity is only 2-EXP-complete
[Rintanen, 2004], as against POMDPs which are in general undecidable [Madani et al., 1999]. However planning
approaches are often insensitive to the cost/quality information. Indeed, in the presence of actions with differing
costs, planners such as MBP can generate plans of arbitrarily low quality, attempt to insert sensing actions without
taking their cost into consideration.
We focus our attention on finding strong plans (i.e. plans
the succeed with probability 1) given an uncertain initial
state (with uniform probability over possible states). Sensing actions give partial observations, causative actions have
deterministic conditional effects, all actions have associated costs, and the model uses a factored representation.
In this paper, we describe a way of extending the state
of the art non-deterministic conditional planners to make
them more sensitive to cost/quality information. Our idea
is to adapt the type of cost-sensitive reachability heuristics that have proven to be useful in classical and temporal
planning [Do and Kambhampati, 2003]. Straightforward
adaptation unfortunately proves to be infeasible. This is because, in the presence of state uncertainty, we will be forced
to generate multiple planning graphs (one for each possible state) and reason about reachability across all those
graphs [Bryce and Kambhampati, 2004]. This can get prohibitively expensive–especially for forward search where
we need to do this analysis at each search node.
The main contribution of this paper is a way to solve this
dilemma. In particular, we propose a novel way of generating reachability information with respect to belief states
without computing multiple graphs. Our approach, called
the labelled uncertainty graph (LU G), symbolically represents multiple planning graphs, one for each state in our belief, within a single planning graph. Loosely speaking, this
single graph unions the support information present in explicit multiple graphs and pushes the disjunction, describing sets of possible worlds (states in a belief), into “labels”
(). The planning graph is built using labels, for sets of
worlds, to annotate the vertices (literals and actions). A
label on a vertex signifies the states of our belief that can
reach the vertex.
To take cost into account, we describe a method for prop-
agating cost information over the LU G in an extension
called the CLU G. The (previously mentioned) labels tell
us when graph vertices (e.g. literals) are reachable, but they
do not indicate the associated reachability cost. We could
track a single cost for the entire set of worlds represented
by a label, but this would lose information about differing
costs for subsets of the worlds. Tracking a cost for each
subset of worlds is also problematic because they are an
exponential in the number of worlds. Even tracking the
cost of individual worlds can also be costly because their
number is exponential in the number of fluents (state variables). Instead we track cost over a fixed partition of world
sets. The size of the partition (number of costs tracked) is
bounded by the number of planning graph levels. Each disjoint set is the worlds in which a literal or action is newly
reached at a level. The CLU G is used as the basis for
doing reachability analysis. In particular, we extract relaxed plans from it (as described in [Bryce et al., 2004]),
using the cost information to select low cost relaxed plans.
Our results show that cost-sensitive heuristics improve plan
quality and scalability.1
We proceed by describing our representation and our planner, called P ON D. We then introduce our planning graph
generalizations called the LU G and the CLU G, and describe the relaxed plan extraction procedure. We present an
empirical study of the techniques within our planner and
compare with two state of the art conditional planners MBP
[Bertoli et al., 2001] and GPT [Bonet and Geffner, 2000].
We end by providing a comparison to related work, a conclusion, and directions for future work, with emphasis on
non-uniform uncertainty.
2
Representation & Search
The planning formulation in our planner P ON D uses progression search to find strong plans, under the assumption
of partial observability. A strong plan guarantees that after
a finite number actions executed from any of the many possible initial states, all resulting states will satisfy the goals.
We represent strong plans as directed acyclic graphs (where
a node with out degree greater than one is a sensory action).
We assume that every plan path is equally likely so our plan
quality metric is the mean of the path costs. The cost of a
plan path the sum of the costs of its edges (which correspond to outcomes of actions).
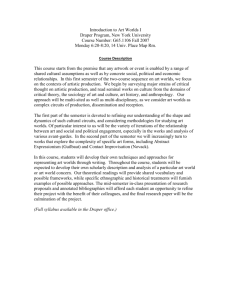
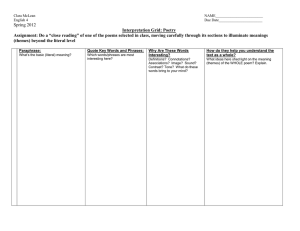
We will use the following as a motivating, as well as, running example to illustrate our techniques:
Example 1. A patient goes to the doctor complaining of
feeling unrested (¬r), but he is unsure if he is actually sick
(s ∨ ¬s). The doctor has two treatment plans: 1) give the
patient drug B to cure the sickness if he is sick, and have
1
A solution for a larger test instance contained nearly 200 belief states among 13 plan paths, of lengths between 18 and 30
actions.
B:{10,15}
r: rested
B: Drug B
s: sick
C: Drug C
R: Rest
S: Blood Test
¬r
¬s∧¬r R:{7,7}
S:{9,12}
s∧¬r
¬s∧r
C:{20,10}
Figure 1: The example’s AO* graph with two cost models.
him rest, R, for a week to become rested, or 2) do a blood
test, S, to determine if he is sick; if so he takes drug C with
no need to rest, otherwise rests for a week. Both treatments
will ensure that he is not sick and rested (¬s ∧ r).
The patient may have one of two insurance providers (cost
models). We show a transition diagram (Figure 1) with annotations on edges for the two cost models. The optimal
plan for the first model is the first plan, at cost 10+7 = 17,
compared to the second at cost ((9+7)+(9+20))/2 = 22.5.
The optimal plan for the second model is the second plan
with cost ((12+7)+(12+10))/2 = 20.5, because the first has
cost 15+7 = 22.
P ON D searches in the space of belief states, a technique
first described by Bonet and Geffner [2000]. The planning
problem P is defined as the tuple D, BSI , BSG , where
D is a domain, BSI is the initial belief state, and BSG is
the goal belief state. The domain D is a tuple F, A, where
F is a set of all fluents and A is a set of actions.
Belief State Representation: A state S is a complete interpretation over fluents. A belief state BS is a set of states,
symbolically represented as a propositional formula over
F , and is also referred to as a set of possible worlds. A
state S is in the set of states represented by a belief state
BS if S is a model of BS (S ∈ M(BS)). In this work
we assume the goal belief state is a conjunctive formula to
simplify the later presentation.
Action Representation: We represent actions as having strictly causative or observational effects, respectively
termed as causative or sensory actions. An action a consists of an execution precondition ρe (a), a set of effects
Φ(a), and a cost c(a). The execution precondition, ρe (a),
is a conjunctive formula that must hold to execute the action. Causative actions have a set of deterministic conditional effects Φ(a) = {ϕ0 (a), ..., ϕm (a)} where each conditional effect ϕj (a) is of the form ρj (a) =⇒ εj (a), and
the antecedent and consequent are conjunctions. Sensory
actions have a set Φ(a) = {o0 (a), ..., on (a)} of observational effect formulas. Each observational effect formula,
oi , defines an outcome of the sensor.
The
actions
in
our
example
are:
B : ρe (B) = , Φ(B) = {s =⇒ ¬s}, c(B) = {10, 15}
C : ρe (C) = s, Φ(C) = { =⇒ ¬s ∧ r}, c(C) = {20, 10}
R : ρe (R) = ¬s, Φ(R) = { =⇒ r}, c(R) = {7, 7}
S : ρe (S) = , Φ(S) : {s, ¬s}, c(S) = {9, 12}
We list two numbers in the cost of each action because our
example uses the first number for cost model one, and the
second for cost model two.
POND Search: We use top down AO* search [Nilsson,
1980], in the P ON D planner to generate conditional plans.
In the search graph, the nodes are belief states and the
hyper-edges are action. We need AO* because using a
sensing action in essence partitions the current belief state.
We use a hyper-edge to represent the collection of outcomes of an action. Sensory actions have several outcomes,
all if any of which must be included in a solution.
The AO* search consists of two repeated steps, expand the
current partial solution, and then revise the current partial
solution. Search ends when every leaf node of the current
solution is a belief state that satisfies the goal belief and
no better solution exists (given our heuristic function). Expansion involves following the current solution to an unexpanded leaf node and generating its children. Revision is
essentially a dynamic programming update at each node in
the current solution that selects a best hyper-edge (action).
The update assigns the action with minimum cost to start
the best solution rooted at the given node. The cost of a
node is the cost of its best action plus the average cost of
its children (the nodes connected through the hyper-edge).
When expanding a leaf node, the children of all applied actions are given a heuristic value to indicate their estimated
cost.
3
Labelled Uncertainty Graph (LU G)
To guide search, we use a relaxation of conditional planning to obtain a lookahead estimate of the conditional
plan’s suffix, rooted at each search node. The relaxation
measures the cost to support the goal when ignoring mutexes between actions, and ignoring sensory actions. We
reason about the cost of sensing in a local manner through
the search itself,2 but do not reason about sensing in a
lookahead fashion. Our heuristic reasons about the conformant transition cost between two sets of states, a belief
state cost measure [Bryce and Kambhampati, 2004]. We review our previous work that uses multiple planning graphs
to calculate belief state distances, and then discuss our generalization, called the LU G which performs the same task
at a lower cost.
Classical planning graph based relaxed plans tend not to
capture information needed to make belief state to belief
state distance measures because they assume perfect state
information. In [Bryce and Kambhampati, 2004] we studied the use of classical planning graphs for belief state
distance measures, but found that using multiple planning
graphs is more effective for estimating belief state distances. The approach constructs several classical planning
graphs, each with respect to a state in our current belief
2
That is, we can reason about the cost of applying a sensing
action at the current search node by adding the cost of the action
to the average cost of its children (whose costs are determined by
the heuristic).
state. Then a classical relaxed plan is extracted from each
graph. We transform the resulting set of relaxed plans into a
unioned relaxed plan, where each layer is the union over the
vertices in the same level of the individual relaxed plans.
The number of action vertices in the unioned relaxed plan
is used as the heuristic estimate. The heuristic measures
both the positive interaction and independence in action sequences that are needed to individually transition each state
in our belief state to a state in the goal belief state.
The obvious downfall of the multiple graph approach is that
the number of planning graphs and relaxed plans is exponential in the size of belief states. Among the multiple planning graphs there are quite a bit of repeated structure, and
computing a heuristic on each can take a lot of time. With
the LU G, our intent is two fold, (i) we would like to obtain
the same heuristic as with multiple graphs, but lower the
representation and heuristic extraction overhead, and (ii)
we also wish to extend the relaxed plan heuristic measure
to reflect non uniform action costs.
3.1
LU G & CLU G
We present the LU G and its extension to handle costs, the
CLU G. The LU G is a single planning graph that uses
an annotation on vertices (actions and literals) to reflect
assumptions about how a vertex is reached. Specifically
we use a label, (k (·)), to denote the models of our current
(source) belief BSs that reach the vertex in level k. In the
CLU G we additionally use a cost vector (ck (·)) to estimate
of the cost of reaching the vertex from different models of
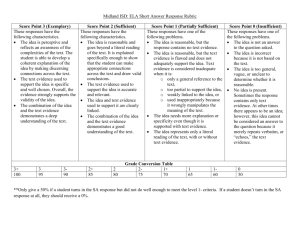
the source belief. These annotations help us implicitly represent the vertices common to several of the multiple planning graphs in a single planning graph. Figure 2 illustrates
the CLU G built for the initial belief in our example. The
initial layer literal labels are used to label the actions and
effects they support, which in turn label the literals they
support. Label propagation is based on the intuition that
(i) actions and effects are applicable in the possible worlds
in which their conditions are reachable and (ii) a literal is
reachable in all possible worlds where it is affected.
Definition 1 (LU G). A LU G is a levelled graph, where a
level k contains three layers, the literal Lk , action Ak , and
effect Ek layers. The LU G is constructed with respect to
the actions in A and a source belief state BSs . Each LU G
vertex vk (·) in level k is a pair ·, k (·), where the “·” is
an action a, effect ϕj (a), or literal l, and k (·) is its label.
Definition 2 (CLU G). A CLU G extends a LU G by associating a triple ·, k (·), ck (·) with each vertex, where
ck (·) is a cost vector.
Definition 3 (Label). A label k (·) is a propositional formula that describes a set of possible worlds. Every model
of a label is also a model of the source belief, implying k (·) |= BSs . For any model Ss ∈ M(BSs ) if
Ss ∈ M(k (·)), then the classical relaxed planning graph
built from Ss contains “·” as a vertex in level k.
s
{<{2},0>}
:s
{<{1},0>}
:r
{<{1,2},0>}
B
{<{1,2},0>}
C
{<{2},0>}
R
{<{1},0>}
World Labels: 1 = : s∧:r, 2 = s∧:r
s
{<{2},0>}
0
B
ϕ (B)
{<{2},B>}
{<{1,2},0>}
:s
{<{1},0>,
ϕ0(C)
C
<{2},min(B,C)>}
{<{2},C>}
{<{2},0>}
r
ϕ0(R)
{<{1,2},C+R>}
R
{<{1},R>}
{<{1},0>,
<{2},min(B,C)>}
:r
{<{1,2},0>}
ϕ0(B)
{<{2},B>}
ϕ0(C)
{<{2},C>}
ϕ0(R)
{<{1},R>,
<{2},min(B,C)+R>}
s
{<{2},0>}
:s
{<{1},0>,
r <{2},min(B,C)>}
{<{1,2},
min(C+R,
min(B,C)+R)>}
:r
{<{1,2},0>}
Figure 2: A LU G for our example problem. Each literal, action, and effect has its cost vector listed.
Definition 4 (Extended Label). An extended label ∗k (f )
for a propositional formula f is defined as the formula that
results from substituting the label k (l) of each literal l for
the literal in f . An extended label is defined:
∗k (f ∧ f ) = ∗k (f ) ∧ ∗k (f ),
∗k (f ∨ f ) = ∗k (f ) ∨ ∗k (f ),
∗k (¬(f ∧ f )) = ∗k (¬f ∨ ¬f ),
∗k (¬(f ∨ f )) = ∗k (¬f ∧ ¬f ),
∗k () = BSs , ∗k (⊥) =⊥, ∗k (l) = k (l)
Labels and Reachability: A literal l is (optimistically)
reachable from a set of states, described by BSs , after
k steps, if BSs |= k (l). A propositional formula f is
reachable from BSs after k steps if BSs |= ∗k (f ).
Definition 5 (Cost Vectors). A cost vector ck (·) is a set of
pairs f i (·), ci (·), where f i (·) is a propositional formula
over F and ci (·) is a rational number. Every ci (·) is an
estimate of the cost of reaching the vertex from all models
Ss ∈ M(f i (·)).
Cost propagation on planning graphs, similar to that used
in the Sapa planner [Do and Kambhampati, 2003], computes the estimated cost of reaching literals at time points.
Since we track whether a literal is reached in more than one
possible world, it is possible that the cost of reaching a literal is different for every subset of these worlds. Instead of
tracking costs for an exponential number of subsets, or even
each individual world, we partition the models of BSs into
fixed sets to track cost over (i.e. the elements of the cost
vectors ck (·)). A cost vector ck (·) is a partition of worlds
represented by the label k (·) that assigns a cost to each of
the disjoint sets. As we will show, the partitions are different for each vertex because we partition with respect to the
new worlds that reach the given action, effect, or literal in
each level. Our reason for defining the partitions this way
is that the size of the partition is bounded by the number of
CLU G levels.
The LU G and CLU G construction requires first defining
our initial literal layer, and then an inductive step to construct a graph level. For each graph layer of the LU G and
CLU G, we compute the label of each vertex k (·). In the
CLU G, we additionally update the cost vector of the vertex. In the following we combine definitions for the LU G
and CLU G layers, but it is easy to see that we obtain the
former by omitting cost vectors and obtain the latter by
computing them.
Initial Literal Layer: The initial layer of the LU G is defined as: L0 = {vk (l)|0 (l) =⊥},
where each label is defined as: 0 (l) = l ∧ BSs ,
and each cost vector is defined as: c0 (l) = {0 (l), 0}
The LU G has an initial layer, L0 , where the label 0 (l) of
each literal l represents the states of BSs in which l holds.
In the cost vector, we store a cost of zero for the entire
group of worlds in which each literal is initially reachable
(i.e. 0 (l), 0).
We illustrate the case where BSs = BSI from the example. In Figure 2 we graphically represent the LU G and
index the models of BSs as worlds {1,2}. We show the
cost vector ck (·) for each vertex. Note, we show worlds as
indexed models, but implement them using a BDD [Bryant,
1986] representation of propositional formulas. In the figure we do not explicitly show propositional labels of the
elements, but do in the text. The labels for the initial literal
layer are:
0 (s) = s ∧ ¬r, 0 (¬s) = ¬s ∧ ¬r, 0 (¬r) = ¬r
As shown in Figure 2, the literals in the zeroth literal layer
have cost zero in their initial worlds.
Action Layer: The kth action layer of the LU G is defined
as: Ak = {vk (a)|k (a) =⊥} ,
where each label is defined as: k (a) = ∗k (ρe (a)),
each
is defined as: ck (a) =
cost vector
{ f i (a), ci (a) |f i (a) =⊥},
each cost vector partition is defined as: f i (a) =
k (a) ∧ ¬k −1 (a), k ≤ k,
and
cost is computed as: ci (a) =
each partition
i
Cover(f (a), ck (l))
l∈ρe (a)
Based on the previous literal layer Lk , the action layer Ak
contains all non-⊥ labelled causative actions from the ac-
tion set A, plus all literal persistence. Persistence for a
literal l, denoted by lp , is represented as an action where
ρe (lp ) = ε0 (lp ) = l. The label of the action at level
k, is equivalent to the extended label of its execution precondition. We partition the cost vector based on worlds
that newly support the vertex in each level. If there are
new worlds supporting a at level k, we need to add a
formula-cost pair to the cost vector with the formula equal
to k (a) ∧ ¬k−1 (a). When k = 0 we can say −1 (a) =⊥.
We then update the cost for each element of the cost vector. We find ci (a) by summing the costs of the execution
precondition literals in the worlds described by f i (a). The
cost of each literal is determined by covering the worlds
f i (a) with the cost vector of the literal. In general, cost
vectors do not have a specific formula-cost pair for a set
of worlds we care about, rather the worlds are partitioned
over several formula-cost pairs. To get a cost for the set of
worlds we care about, we do a cover with the disjoint world
sets in the cost vector. We try to find a minimum cost for
the cover because planning graphs typically represent an
optimistic projection of reachability.
Cover(f, c): A Cover of a formula f with a set of formulacost pairs c = {f 1 (·), c1 (·), ..., f n (·), cn (·)}, is equivalent to a weighted set cover problem [Cormen et al.,
1990] where the set of models of f must be covered with
weighted sets of models defined by the formula-cost pairs
⊆ c covers f with cost
in
pairs c
c. A set of formula-cost
i
i
c
(·)
when
f
|=
i:f i (·),ci (·)∈c
i:f i (·),ci (·)∈c f (·).
Finding a minimum cover is an NP-Complete problem, following from set cover. We solve it using a greedy algorithm that at each step chooses the least cost formula-cost
pair that covers a new world of our set of worlds. Fortunately in the action and effect layers, the Cover operation
is done with (non-overlapping) partitions, meaning there is
only one possible cover. This is not the case in the literal
layer construction and relaxed plan extraction because the
cover is with a set of possibly overlapping sets. We show
an example of using Cover after the literal layer definition.
The zeroth action layer has the following labels:
0 (B) = 0 (¬rp ) = ¬r, 0 (C) = 0 (sp ) = s ∧ ¬r,
0 (R) = 0 (¬sp ) = ¬s ∧ ¬r
The action B is reachable in both worlds at a cost of zero
because it has no execution precondition, whereas C has a
cost of zero in world two because its execution precondition holds in world two at a cost of zero.
Effect Layer: The kth effect layer of the LU G is defined
as: Ek = {vk (ϕj (a))|k (ϕj (a)) =⊥},
where each label is defined as: k (ϕj (a)) =
∗k (ρj (a)) ∧ k (a),
each cost vector is defined as: ck (ϕj (a)) =
{f i (a), ci (a)|f i (a) =⊥},
each cost vector partition is defined as: f i (a) =
k (ϕj (a)) ∧ ¬k −1 (ϕj (a)), k ≤ k,
i
and each partition cost is compute
as: c (a) = i
i
Cover(f (a), ck (l))
c(a) + Cover(f (a), ck (a)) +
l∈ρj (a)
An effect ϕj (a) is included in Ek , when it is reachable in
some world of BSs , i.e. k (ϕj (a)) =⊥, which only happens when both the associated action and the antecedent
are reachable in at least one world together. The cost ci (a)
of world set f i (a) of an effect at level k is found by adding
the execution cost of the associated action, the support cost
of the action in the worlds of f i (a), and the support cost of
the antecedent in f i (a) (found by summing over the cost of
each literal of ϕj (a) in f i (a)).
The zeroth effect layer for our example has the labels:
0 (ϕ0 (B)) = 0 (ϕ0 (C)) = 0 (ϕ0 (sp )) = s ∧ ¬r,
0 (ϕ0 (R)) = 0 (ϕ0 (¬sp )) = ¬s ∧ ¬r, 0 (ϕ0 (¬rp )) = ¬r
The effect of action B has the cost of B in world two, even
though B could be executed in both worlds. This is because the effect is only enabled in world 2 by its antecedent
s. Likewise, the effects of C and R have the cost of respectively executing C and R. While not shown, the persistence
effects have cost zero in the worlds of the previous level.
Literal Layer: The kth literal layer of the LU G is defined
as: Lk = {vk (l)|k (l) =⊥},
where
the label of each literal is defined as: k (l) =
j
ϕj (a):l∈εj (a),vk−1 (ϕj (a))∈Ek−1 k−1 (ϕ (a)),
each cost vector is defined as: ck (l) =
{f i (a), ci (a)|f i (a) =⊥},
each cost vector partition is defined as: f i (a) =
k (l) ∧ ¬k −1 (l), k ≤ k,
i
and each partition
cost is computed as: c (a) =
i
Cover(f (a), ϕj (a):l∈εj (a),vk−1 (ϕj (a))∈Ek−1 ck−1 (ϕj (a)))
The literal layer, Lk , contains all literals with non-⊥ labels.
The label of a literal, k (l), depends on Ek−1 and is the disjunction of the labels of each effect that causes the literal.
The cost ci (a) in a set of worlds f i (a) for a literal at level
k is found by covering the worlds f i (a) with the union of
all formula-cost pairs of effects that support the literal.
The first literal layer for our example has the labels:
1 (s) = s ∧ ¬r, 1 (¬s) = 1 (r) = 1 (¬r) = ¬r
In our example, we want to update the formula-cost pairs of
¬s at level one. There are three supporters of ¬s, the persistence of ¬s in world 1, the effect of action B in world
2 and the C action’s effect in world 2. The formula-cost
tuples for ¬s at level 1 are for {1} and {2}. We group
the worlds this way because ¬s was originally reachable
in world 1, but is newly supported by world 2. For the
formula-cost pair with world 1 we use the persistence in
the cover. For the formula-cost pair with world 2, the supporters are B and C, and we choose one for the cover. In
Figure 2 we assign a cost of min(B, C) because we discuss
two different cost models. We must also assign a cost to the
formula-cost pair for r in worlds 1 and 2. The cover for r in
these worlds must use both the effect of C and R because
each covers only one world, hence its cost is C + R.
min arg min
Level off: The graph levels off when Lk = Lk−1 .
model of BSs is able to reach a model of BSG and the
cost of reaching BSG is minimal.
In our example we level off (terminate construction) at level
two with the LU G and level three with the CLU G. We
show up to level two because level three is identical. We
can say that the goal is reachable after one step from the
initial belief because BSI = ¬r |= ∗1 (BSG ) = ¬r.
3.2
Relaxed Plans
The relaxed plan heuristic we extract from the LU G and
the CLU G is similar to the multiple graph relaxed plan
heuristic, [Bryce and Kambhampati, 2004]. As previously
described, the multiple graph heuristic uses a planning
graph for every possible world of our source belief state
to extract a relaxed plan to achieve the goal belief state.
The LU G and CLU G relaxed plan heuristics are similar
by accounting for positive world interaction and independence across source states in achieving the goals. The advantage is that we find the relaxed plans by using only one
planning graph to extract a single, albeit more complicated,
relaxed plan. In a relaxed plan we find a line of causal support for the goal from every state in BSs . Since many possible worlds use some of the same vertices to support the
goal, we label relaxed plan vertices with which worlds use
them. There may be several paths used to support a subgoal
in the same worlds because not one is used by all worlds.
For example, notice that in Figure 2 it takes both C and R
to support r in both worlds because each action supports
only one world. One challenge in extracting the relaxed
plan is in tracking what worlds use which paths to support
subgoals. Another challenge is in extracting cost-sensitive
relaxed plans, for which the propagated cost vectors help.
The multiple graph, LU G, and CLU G relaxed plans are
inadmissible (i.e. will not guarantee optimal plans with
AO* search). Admissible heuristics are lower bounds that
enable search to find optimal solutions, but most in practice are very ineffective. In the next section we demonstrate
that although our heuristics are inadmissible they guide our
planner toward high quality solutions.
We describe relaxed plan construction by first defining relaxed plans for the LU G and CLU G (pointing out differences), then how the last literal layer is built, followed by
the inductive step to construct a level.
Definition 6 (Relaxed Plans). A relaxed plan extracted
from the LU G or CLU G for BSs is defined with respect to the goal belief state BSG . The relaxed plan
is a subgraph that has b levels (see below), where each
RP
level k has three layers, the literal LRP
k , action Ak ,
RP
RP
and effect Ek layer. Each vertex vk (·) in the relaxed plan is a pair ·, RP
k (·). The level b of the LU G
is the earliest level where BSs |= ∗b (BSG ), and b =
k
Sd ∈M(BSG ) l∈Sd
Cover(k (l), ck (l)), meaning every
Last Relaxed Plan Literal Layer: The final literal layer
of the relaxed plan contains all literals that are in
LRP
b
models of the destination belief BSG . The final literal layer
is a subset of the vertices in Lb . Each literal l has a label
equivalent to its label at level b, i.e. RP
b (l) = b (l).
Relaxed Plan Effect Layer: The kth effect layer EkRP contains all the effects needed to support the literals in LRP
k+1 .
j
(ϕ
(a))
of
an
effect
is
the
disjunction
of
all
The label RP
k
worlds where the effect is used to support a literal. The litRP
RP (l)∈LRP :
when ∀vk+1
erals in LRP
k+1 are supported by Ek
k+1
RP
k+1 (l) |=
RP
ϕj (a):vk
(ϕj (a))∈EkRP ,
l∈εj (a)
j
RP
k (ϕ (a))
The above formula states that each vertex in the literal layer
must have effects chosen for the supporting effect layer
such that for all worlds where the literal must be supported,
there is an effect that gives support.
We construct the effect layer by using a greedy minimum
cover operation for each literal to pick the effects that support worlds where the literal needs support. In the LU G,
we use a technique that does not rely on cost vectors and
at each step chooses the effect that covers the literal in the
most new worlds. The intuition is that we will include less
effects (and actions) if they support in more worlds. In the
CLU G we use a technique that at each step chooses an effect that can contribute support in new worlds at the lowest
cost. We insert the chosen effects in the effect layer and
label them to indicate the worlds where they were used for
support.
Relaxed Plan Action Layer: The kth action layer ARP
k
contains all actions whose effects were used in EkRP . The
associated label RP
k (a) for each action a is the disjunction
of the labels of each of its effects that are elements of EkRP .
Relaxed Plan Literal Layer: The kth literal layer LRP
k
contains all literals that appear in the execution preconditions of actions in ARP
k , or the antecedents of effects in
EkRP . The associated label RP
k (l) for each literal l is the
disjunction of the labels of each of each respective action
and effect in ARP
or EkRP which the literal appears in the
k
execution precondition or antecedent.
We support literals with effects, insert actions, and insert
literals until we have supported all literals in LRP
1 . Once
we get a relaxed plan, the relaxed plan heuristic is the sum
of the selected action costs.
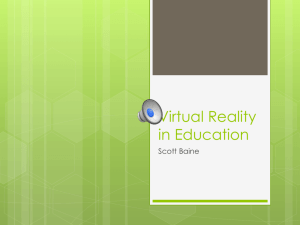
In Figure 3 we show three relaxed plans to support BSG
CLUG Relaxed Plan for Cost Model 1
:s
:s
{1,2}
{1}
0
s
B
ϕ (B)
{2}
{2}
{2}
R
{1,2}
CLUG Relaxed Plan for Cost Model 2
:s
s
C
ϕ0(C)
{1,2}
{2}
{2}
{2}
:s
{1}
R
{1}
ϕ0(R)
{1}
h(: r) = B + R = 17
:s
{1,2}
0
r
ϕ (R)
{1,2}
{1,2}
h(: r) = C + R = 17
r
{1,2}
LUG Relaxed Plan for Cost Model 1 & 2
s
{2}
B
{2}
ϕ0(B)
{2}
:s
{1,2}
:s
{1}
R
{1}
ϕ0(R)
{1}
r
{1,2}
h(: r) = B + R =
17 : Cost Model 1
27 : Cost Model 2
Figure 3: Illustration of CLU G and LU G relaxed plans
for two cost models.
from BSI . The first two are for the two cost models
we presented using the CLU G; the third is for both cost
models when using the LU G. All relaxed plans need to
support the goal literals in worlds 1 and 2 (the worlds of
BSI ). We find that BSG is reachable at level one, at a
cost of min(B, C) + C + R, and at level two at a cost of
min(B, C)+min(C + R,min(B, C) + R). In the first cost
model, level one costs 37 and level two costs 27 – so we
extract starting at level 2; and with the second cost model
level one costs 27 and level two costs 27 – so we extract at
level 1 as there is no drop in cost at level 2. Using the LU G
we choose level 1 because it is the first level the goals are
reachable. To extract a relaxed plan in the first cost model
from the CLU G we support ¬s in both worlds with a persistence rather than B because the persistence covers both
worlds with a propagated cost of 10, opposed to 20 with
B. Likewise, r is supported with R at a propagated cost of
10, opposed to 27 for the persistence. Next, we support ¬s
at level one in world 2 with A because it is cheaper than
C, and in world 1 with the only choice, persistence. The
relaxed plan has value 17 because it chose B and R. We
leave the second cost model as an exercise. In the LU G
relaxed plan we could extract B, R for either cost scenario
because R covers r in the most worlds, and B is chosen
for supporting ¬s. The LU G relaxed plan extraction is not
sensitive to cost, but the relaxed plan value reflects action
cost.
4
Empirical Comparisons
Our main intent is to evaluate the effectiveness of the LU G
and the CLU G in improving the quality of plans generated by P ON D. Additionally, we also compare with two
state of the art planners, GPT [Bonet and Geffner, 2000],
and MBP [Bertoli et al., 2001]. Even though MBP does
not plan with costs, we show the cost of MBP’s plans for
each problem’s cost model. GPT uses heuristics based on
relaxing the problem to full-observability (whereas our relaxation is to no observability while ignoring action mutexes), and MBP uses a belief state’s size as its heuristic
merit. Our test set up involves two domains: MedicalSpecialist and Rovers. Each problem had a time out of 20
minutes and a memory limit of 1GB on a 2.8GHz P4 Linux
machine. We provide our planner and domain encodings at
http://rakaposhi.eas.asu.edu/belief-search/.
POND is implemented in C and uses several existing technologies. It employs AO* search code from Eric Hansen,
planning graph construction code from Joerg Hoffmann,
and the BDD CUDD package from Fabio Somenzi for representing belief states, actions, and labels.
Medical-Specialist: We developed an extension of the
medical domain [Weld et al., 1998], where in addition
to staining, counting of white blood cells, and medicating, one can go to a specialist for medication and
there is no chance of dying – effectively allowing conformant (non-sensing) plans. We assigned costs as follows:
c(stain) = 5, c(count white cells) = 10, c(inspect stain) =
X, c(analyze white cell count) = X, c(medicate) = 5, and
c(specialist medicate) = 10. We generated ten problems,
each with the respective number of diseases (1-10), in two
sets where X = {15, 25}. Plans in this domain must treat
a patient by either performing some combination of staining, counting white cells, and sensing actions to diagnose
the exact disease and apply the proper medicate action, or
using the specialist medicate action without knowing the
exact disease. Plans can use hybrid strategies, using the
specialist medicate for some diseases and the diagnosis and
medicate for others. The strategy depends on cost and the
number of diseases.
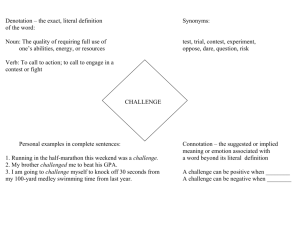
Our results in the first two columns in Figures 4, 5, and
6 show the average plan path cost, number of plan nodes
(belief states) in the solution, and total time for two cost
models; the x-axis reflects different problem instances. Extracting relaxed plans from the CLU G instead of the LU G
enables P ON D to be more cost-sensitive. The plans returned by the CLU G method tend to have less nodes and a
lower average path cost than the LU G. The LU G heuristic
does not measure sensing cost, but as sensing cost changes,
the search is able to locally gauge the cost of sensing and
adapt. Since MBP is insensitive to cost, its plans are proportionately costlier as the sensor cost increases. GPT returns better plans, but tends to take significantly more time
as the cost of sensing increases; this may be attributed to
how the heuristic is computed by relaxing the problem to
full-observability. Our heuristics measure the cost of coachieving the goal from a set of states, whereas GPT takes
the average cost for reaching the goal from the states.
Rovers: We use an adaptation of the Rovers domain from
the Third International Planning Competition [Long and
100
100
LUG
CLUG
MBP
GPT
10
5
1
2
3
4
5
6
7
LUG
CLUG
MBP
GPT
10
5
8
9
10
1
2
3
4
5
6
7
3000
3000
1000
1000
LUG
CLUG
MBP
GPT
100
8
9
10
0
2
4
6
8
LUG
CLUG
MBP
GPT
100
10
12
0
2
4
6
8
10
12
Figure 4: Quality (average plan path cost) for P ON D (LU G and CLU G), M BP , and GP T for Medical-Specialist and Rovers.
50
50
10
10
LUG
CLUG
MBP
GPT
1
1
2
3
4
5
6
7
LUG
CLUG
MBP
GPT
1
8
9
10
1
2
3
4
5
6
7
200
200
50
50
LUG
CLUG
MBP
GPT
5
8
9
10
0
2
4
6
8
LUG
CLUG
MBP
GPT
5
10
12
0
2
4
6
8
10
12
10
12
Figure 5: Number plan nodes for P ON D (LU G and CLU G), M BP , and GP T for Medical-Specialist and Rovers.
1e6
1e6
LUG
CLUG
MBP
GPT
1e3
LUG
CLUG
MBP
GPT
1e3
1e5
1e5
1e4
1e4
LUG
CLUG
MBP
GPT
1e3
1
1
1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
0
2
4
6
8
LUG
CLUG
MBP
GPT
1e3
10
12
0
2
4
6
8
Figure 6: Total Time(ms) for P ON D (LU G and CLU G), M BP , and GP T for Medical-Specialist and Rovers.
Fox, 2003] where there are several locations with possible science data (images, rocks, and soil). We added sensory actions to determine availability of scientific data and
conditional actions that conformantly collect data. Our action cost model is: c(sense visibility) = X, c(sense rock)
= Y, c(sense soil) = Z, c(navigate) = 50, c(calibrate)
= 10, c(take image) = 20, c(communicate data) = 40,
c(sample soil) = 30, c(sample rock) = 60, and c(drop) =
5. The two versions have costs: (X,Y,Z) = {(35, 55, 45),
(100, 120, 110)}. Plans in the rovers domain can involve
sensing at locations to identify if data can be collected or
simply going to every possible location and trying to collect data. The number of locations varies between four and
eight, and the number of possible locations to collect up to
three types of data can be between one and four.
The last two columns of Figures 4, 5, and 6 show the average path cost, number of nodes in the solution, and total
time for the two cost models. We found that the LU G and
CLU G relaxed plan extraction guide POND toward similar plans, in terms of cost and number of nodes. The lack
of difference between the heuristics may be attributed to
the domain structure – good solutions have a lot of positive interaction (i.e. the heuristics extract similar relaxed
plans because low cost actions also support subgoals in
many possible worlds), opposed to Medical where solutions are fairly independent for different possible worlds.
MBP, making no use of action costs, returns plans with considerably (a order of magnitude) higher average path costs
and number of solution nodes. GPT fares better than MBP
in terms of plan cost, but both are limited in scalability due
to weaker heuristics.
In summary, the experiments show that the LU G and
CLU G heuristics help with scalability and that using the
CLU G to extract relaxed plans can help find better solutions. We also found that planners not reasoning about action cost can return arbitrarily poor solutions, and planners
whose heuristic relaxes uncertainty do not scale as well.
5
Related Work
The idea of cost propagation on planning graphs was first
presented by Do and Kambhampati [2003] to cope with
metric-temporal planning. The first work on using planning graphs in conditional planning was in the CGP [Smith
and Weld, 1998] and SGP [Weld et al., 1998] planners. Recently, planning graph heuristics have proven useful in conformant planning [Bryce and Kambhampati, 2004; Brafman and Hoffmann, 2004] and conditional planning [Cushing and Bryce, 2005; Hoffmann and Brafman, 2005]. They
have also proven useful in reachability analysis for MDPs
[Boutilier et al., 1998]; our work could be extended for
POMDPs. Also related is the work on sensor planning,
such as Koenig and Liu [1999]. The authors investigate
the frequency of sensing as the plan optimization criterion
changes (from minimizing the worst case cost to the expected cost). We investigate the frequency of sensing while
minimizing average plan cost under different cost models. The work on optimal limited contingency planning
[Meuleau and Smith, 2003] stated that adjusting sensory
action cost, as we have, is an alternative to their approach
for reducing plan branches.
6
Conclusion & Future Work
With our motivation toward conditional planning approaches that can scale like classical planners, but still reason with quality metrics like POMDPs, we have presented
a novel planning graph generalization called the LU G and
an associated cost propagated version called the CLU G.
With the CLU G we extract cost-sensitive relaxed plans
that are effective in guiding our planner P ON D toward
high-quality conditional plans. We have shown with an empirical comparison that our approach improves the quality
of conditional plans over conditional planners that do not
account for cost information, and we that can out-scale approaches that consider cost information and uncertainty in
a weaker fashion.
While our relaxation of conditional planning ignores sensory actions, we have explored techniques to include observations in heuristic estimates. The basic idea is to extract
a relaxed plan then add sensory actions that reduce cost by
removing mutexes (sensing to place conflicting actions in
different branches) or reducing average path cost (ensuring
costly actions are not executed in all paths). The major reason we do not report on using sensory relaxed plans here
is that scalability of these techniques is somewhat limited,
despite their ability to further improving plan quality. We
are investigating ways to reduce computation cost.
Given our ability to propagate numeric information on the
LU G, we are currently adapting these heuristics and our
planner to handle non uniform probabilities. The extension
involves adding probabilities to labels by using ADDs instead of BDDs, and redefining propagation semantics. The
propagation semantics replaces conjunctions with products, and disjunctions with summations. A label represents
a probability distribution over possible worlds, the probability of reaching the vertex is a summation over the possible world probabilities, and the expected cost of a vertex is
the sum of products between cost vector partitions and the
label. Relaxed plans, which previously involved weighted
set covers with a single objective (minimizing cost) become
multi-objective by trading off cost and probability.
In addition to cost propagation we have also extended
the LU G within the framework of state agnostic planning
graphs [Cushing and Bryce, 2005]. The LU G seeks to
avoid redundancy across the multiple planning graphs built
for states in the same belief state. We extended this notion to avoid redundancy in planning graphs built for every
belief state. We have shown that the state agnostic LU G
(SLU G) which is built once per search episode (opposed
to a LU G at each node) can reduce heuristic computation
cost without sacrificing informedness.
Acknowledgements: This research is supported in part by the
NSF grant IIS-0308139 and an IBM Faculty Award to Subbarao
Kambhampati.
References
P. Bertoli, A. Cimatti, M. Roveri, and P. Traverso. Planning in
nondeterministic domains under partial observability via symbolic model checking. In Proceedings of IJCAI’01, 2001.
B. Bonet and H. Geffner. Planning with incomplete information
as heuristic search in belief space. In Proceedings of AIPS’02,
2000.
C. Boutilier, R. Brafman, and C. Geib. Structured reachability
analysis for Markov decision processes. In Proceedings of
UAI’98, 1998.
R. Brafman and J. Hoffmann. Conformant planning via heuristic
forward search: A new approach. In Proceedings of ICAPS’
04, 2004.
Randal E. Bryant. Graph-based algorithms for Boolean function
manipulation. IEEE Transactions on Computers, C-35(8):677–
691, August 1986.
D. Bryce and S. Kambhampati. Heuristic guidance measures for
conformant planning. In Proceedings of ICAPS’04, 2004.
D. Bryce, S. Kambhampati, and D. Smith. Planning in belief
space with a labelled uncertainty graph. Technical report,
AAAI Workshop TR WS-04-08, 2004.
T. Cormen, C. Leiserson, and R. Rivest. Introduction to Algorithms. McGraw-Hill, 1990.
W. Cushing and D. Bryce. State agnostic planning graphs. In
Proceedings of AAAI’05, 2005.
Minh Binh Do and Subbarao Kambhampati. Sapa: A scalable
multi-objective heuristic metric temporal planner˙ JAIR, 2003.
J. Hoffmann and R. Brafman. Contingent planning via heuristic
forward search with implicit belief states. In Proceedings of
ICAPS’05, 2005.
S. Koenig and Y. Liu. Sensor planning with non-linear utility
functions. In Proceedings of ECP’99, 1999.
M. Littman, J. Goldsmith, and M. Mundhenk. The computational
complexity of probabilistic planning. JAIR, 9:1–36, 1998.
D. Long and M. Fox. The 3rd international planning competition:
Results and analysis. JAIR, 20:1–59, 2003.
O. Madani, S. Hanks, and A. Condon. On the undecidability of
probabilistic planning and infinite-horizon partially observable
markov decision problems. In Proceeding of AAAI’99, 1999.
N. Meuleau and D. Smith. Optimal limited contingency planning.
In Proceedings of UAI’03, 2003.
N. Nilsson. Principles of Artificial Intelligence. Morgan Kaufmann, 1980.
R. Petrick and F. Bacchus. A knowledge-based approach to planning with incomplete information and sensing. In Proceedings
of AIPS’02, 2002.
J. Rintanen. Complexity of planning with partial observability. In
Proceedings of ICAPS’04, 2004.
D. Smith and D. Weld. Conformant graphplan. In Proceedings of
AAAI’98, 1998.
D. Weld, C. Anderson, and D. Smith. Extending graphplan to
handle uncertainty and sensing actions. In Proceedings of
AAAI’98, 1998.