Rigid-Plastic Approximations for Predicting Plastic
advertisement

Rigid-Plastic Approximations for Predicting Plastic
Deformation of Cylindrical Shells Subject to Dynamic
Loading
The MIT Faculty has made this article openly available. Please share
how this access benefits you. Your story matters.
Citation
Hoo Fatt, Michelle S., Tomasz Wierzbicki, Minos Moussouros,
and John Koenig. “Rigid-Plastic Approximations for Predicting
Plastic Deformation of Cylindrical Shells Subject to Dynamic
Loading.” Shock and Vibration 3, no. 3 (1996): 169–181. © 1996
by John Wiley & Sons, Inc.
As Published
http://dx.doi.org/10.3233/SAV-1996-3303
Publisher
Hindawi Publishing Corporation
Version
Final published version
Accessed
Thu May 26 09:13:54 EDT 2016
Citable Link
http://hdl.handle.net/1721.1/96232
Terms of Use
Creative Commons Attribution
Detailed Terms
http://creativecommons.org/licenses/by/2.0
Michelle S. Hoo Fatt
Tomasz Wierzbicki
Department of Ocean Engineering
Massachusetts Institute of
Technology
Cambridge, MA 02139
Minos Moussouros
John Koenig
Naval Surface Warefare Center
Indian Head Division
Silver Spring, MD
Rigid-Plastic Approximations
for Predicting Plastic
Deformation of Cylindrical
Shells Subject to
Dynamic Loading
A theoretical approach was developed for predicting the plastic deformation of a
cylindrical shell subject to asymmetric dynamic loads. The plastic deformation of the
leading generator of the shell is found by solving for the transverse deflections of a
rigid-plastic beam/ string-on-foundation. The axial bending moment and tensile force
in the beam/string are equivalent to the longitudinal bending moments and membrane
forces of the shell, while the plastic foundation force is equivalent to the shell circumferential bending moment and membrane resistances. Closed-form solutions for the
transient and final deformation profile of an impulsive loaded shell when it is in a
"string" state were derived using the eigenfunction expansion method. These results
were compared to D YNA 3D predictions. The analytical predictions of the transient
shell and final centerline deflections were within 25% of the DYNA 3D results.
© 1996 John Wiley & Sons, Inc.
INTRODUCTION
The objective of this study is to develop a general approach for predicting the plastic deformation of a cylindrical shell subject to dynamic loading. The shell is subject to a "side-on" pressure
load (i.e., one in which the loading is asymmetric
in the circumferential direction). Previous analytical attempts by Witmer et al. (1960) and Greenspon (1970) to solve this problem resulted in
closed-form expressions for the final deformation
and response time of the shell, but these solutions
do not give the transient deformation of the shell.
Several commercially available numerical codes
(see for example, Underwood, 1972; Stricklin et
aI., 1974; Jiang and Olson, 1991) are also available
Received July 18, 1995; Accepted December 5, 1995.
Shock and Vibration, Vol. 3, No.3, pp. 169-181 (1996)
© 1996 by John Wiley & Sons, Inc.
for finding the transient deformation of the shell,
and the analytical model will be compared with
DYNA 3D numerical predictions produced by
Moussouros and Koenig (1994). The particular
example chosen for comparing the analytical solution with DYNA 3D predictions is an aluminum
shell subjected to asymmetric impulsive loading.
It is well known that the coupled nonlinear
partial differential equations that govern shell deformation are mathematically intractable if the
loading to the shell is asymmetric because derivatives with respect to the circumferential direction
must be retained. In the following theory, the
distribution of the shell deformation in the circumferential direction is specified by considering
a kinematically admissible plastic collapse mech-
CCC 1070-9622/96/030169-13
169
170
Hoo Fat! et al.
anism of a ring in plane strain. The circumferential
distribution of the ring deformation is assumed
to be the same for each cross section of the shell,
and the function used to describe it yields "equivalent functions," i.e., average values of shell
quantities found by integration with respect to
the circumferential coordinate. It will be shown
subsequently that by deriving equivalent shell
functions, one may represent the longitudinal
bending moment and membrane force of the shell
as the axial bending moment and tensile force in
a beam/string, and the circumferential bending
moment and membrane compression as a plastic
foundation that supports the beam/string. The
equivalent functions are functions only of axial
direction, and thus enable us to solve the twodimensional (2-D) shell as a leD beam/string-onfoundation. The beam-on-foundation model for
the shell has been used to model shells undergoing
large plastic deformation and gave useful results
in applications such as the pinching of tubes
(Reid, 1978), the denting of tubes (Wierzbicki and
Suh, 1988), and projectile impact into thin cylindrical shells (Yu and Stronge, 1990).
In developing the theoretical model for the
shell, we assume a material that is isotropic, rate
independent, and rigid-plastic. A general methodology for reducing the 2-D shell problem subjected to dynamic pressure loads into a I-D problem involving a rigid-plastic beam/string resting
on a rigid-plastic foundation and subjected to
equivalent line load is first derived in this article.
This is then followed by the solution for a special
case of an impulsively loaded shell using the
eigenfunction expansion method. Finally, the analytical solutions for the transient and final deformation of the impulsively loaded shell are compared to DYNA 3D predictions.
THEORETICAL FORMULATION
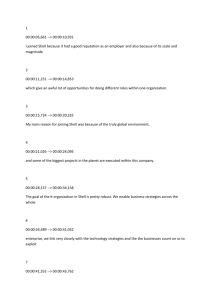
Consider a long cylindrical shell of thickness n
and radius R as shown in Fig. 1. The cylinder
is subjected to an inward radial pressure pulse
p(x, 8, t) only on the upper half of the cylinder.
The load is asymmetric, but it has two planes of
symmetry at x = 0 and 8 = O. The load intensity
is such that the shell experiences localized plastic
deformation, i.e., the maximum extent in the
hoop direction is of the order of the shell radius
or smaller, and the axial distribution of the shell
deformation spans over a few shell radii. In addition to the inward radial pressure are radial shear
force F,., axial force F r , and bending moment T
at the ends of the shell.
As a result of these loads, the shell undergoes
deformation u(x, 8, t), where x, 8 denotes the
axial and circumferential coordinates and t denotes time, and rigid body displacement in the
radial direction w lend and axial direction u lend' and
rotation w lend at the ends.
I
Material Idealization
In the theoretical formulation of the problem, the
material is assumed to be isotropic, time-independent, and rigid-plastic. Neglect of elasticity and
strain rate tends to increase the value of the flow
stress U o of most ductile materials, and the rigidplastic approximation provides an upper bound
for shell deformations.
Material strain hardening may be taken into
account by using the concept of an average flow
stress U o ' which lies somewhere between the
yield and ultimate strength. (The flow strength
is calculated by requiring equal areas under the
actual material stress-strain curve and the approximate rigid-plastic stress-strain curve.)
When the material undergoes considerable work
hardening, the flow stress represents a constant,
elevated stress corresponding to an average strain
e av during the loading process, U o = u(e av ). An
average strain during the loading process is then
evaluated from the solution for the deformation
based on the assumed flow stress. If the calculated average strain corresponds to the assumed
flow stress, then the rigid-plastic solution is consistent with the assumed flow stress. If both are
not consistent with each other, the flow stress
that corresponds to the average strain is evaluated
and used to derive a new solution for shell deformation. The iterative process is repeated until the
average strain and flow stress are in agreement
with the material stress-strain relation.
Dynamic Equilibrium
The overall shell equilibrium is expressed via the
principle of virtual velocities
D ==
f
v
uUe;jdV =
f pw
s
dS -
J pww dV,
v
(1)
where ( . ) denotes a/at, D is the rate of plastic
work dissipated, uij and sij denote stress and
Plastic Deformation of Cylindrical Shells
~
171
P (X,e, t)
Fr
Fx
~ ~...L-l----L---L-.J'--L---L....O>---, I}/x
Fr
x
FIGURE 1 Geometry of and loading on the cylindrical shell.
strain rate, w is the displacement vector, and p
is a generalized surface traction.
In shell coordinates for which a differential
shell element is dS = dx R de, the above equation
is expressed as
2
rr
2R
=
2
rr
(M,,(3K,,(3 + N,,(38,,(3) de dx
2R
+ 2· 2R
Pow de dx + 2· 2R
r
- 2 fog 2R
where
Fxulend de
Frwlend de + 2· 2R f7T Tw' lend de
r
o
r
Previous analyses by Wierzbicki and Suh
(1988) and Moussouros and Hoo Fatt (1995)
showed that the contribution of plastic work associated with shear deformation is 10-15% of the
total plastic work dissipated in tubes subject to
transverse "knife" loading. As a first-order approximation, assume that MxoKxo = N¥08 xO = 0,
so that (he rate of plastic dissipation simplifies to
0
m(iiu
+ vv + ww') de dx,
(2)
(6)
g is
m = [x,
the extent of plastic deformation, [ex,
e]; M,,(3 and N,,(3 are the corresponding
tensors of the bending moment and membrane
force; K"(3 and 8"(3 are curvature and strain rates;
the velocity vector w[u, v, w] corresponds to the
x, e, r axis; p is a vector of surface tractions with
components p[O, 0, Po] in the x, e, r direction;
and m = ph is the mass per unit shell area.
The bending moments M,,(3 and membrane
forces N,,(3 are coupled through a yield condition,
(3)
which is assumed to be a plastic potential for the
generalized strain rates
.
\
af
K,,(3="-M '
a a(3
.
af
Sa(3=A'
aN a(3
(4)
Strain-Displacement Relations
If we confine our analysis to moderately large
deflection and small strains, the Lagrangian description of the axial strain and curvature rates
are (Brush and Almroth, 1975)
u' + w'w',
Kxx = -w",
8xx =
(8)
where ( )' denotes afax.
Equivalent Functions
Substituting Eqs. (7) and (8) into Eq. (2) gives the
following statement of dynamic equilibrium:
-2
where A is a proportionality constant.
An expression of the rate of plastic work dissipated in the shell b is
(7)
fo
g
2R
r
0
Mxx w" de dx
172
Hoo Fatt et al.
r
r
= 2 f g 2R fIT pow dO dx + 2· 2R
o
0
f
o
o
2R
r
0
F,ulend dO
0
+ 2· 2R fIT Frwlend dO + 2· 2R
- 2
(16)
0
(9)
Assume: tangential deformations are negligible, i.e., v = 0; there is no warping, i.e., u is
independent of 0; and cross-sections of the deforming shell are similar and correspond to a plastically deforming ring in plane strain whose deformation field may be described in terms of its
centerline deflection w(x, 0 = 0, t) = wjx, t). For
a given deformation field, each term in Eq. (9)
may be integrated with respect to the circumferential coordinate to give the following expression
for deriving equivalent functions: an equivalent
line load,
r
Pow(x, 0, t) dO,
(10)
r
o
ww(x, 0, t) dO,
(11)
r
(Meei<ee
(12)
0, t) dO,
w~w~ = 2R
Mu wl/(x, 0, t) dO, (13)
r
Nxxw'w'(x, 0, t) dO,
r
o
2
f
g
0
[-Mw~
=
-
+ qwo + 21TRNxxu~ + Nw ~ w~l dx
2F,u olend + 2Frwo len d + 2Tw~lend
+2
- 2
f
f
pWo dx
(18)
[21TRmii o u o + mWowol dx.
Integrating Eq. (18) by parts, one gets
-(Nw~)' + q- plwo dx+ (21TRNxx - FJuolends
f
Fxulend dO,
an equivalent applied shear force,
-
-
(19)
The above equations are valid for all virtual velocities. Therefore,
(Nw~)'
+q =p
with boundary conditions Nw' - M'
Wolend = 0 and M = Tor W~lend = 0, and
(20)
=
Fr or
(21)
(14)
an equivalent applied axial force,
Fx· Uolend = 2R
(17)
Tw'lend dO.
All equivalent functions depend on variables
x and t; they are a consequence of the dynamic
response of the shell. Even the equivalent mass
varies with position and time because of varying
inertia forces induced by the shell motion.
Introducing equivalent functions into Eq. (9)
gives
mwo + MI/ -
an equivalent axial membrane force,
N(x, t)·
o
o
an equivalent axial bending moment,
r
r
g
+ Neeeee)(x,
M(x, t) . w~ = 2R
2R
+ 2R1T( - N'xx + mUo)uo dx + (M - T)w ~Iends = 0
an equivalent ring crushing resistance,
q(x, t) . Wo = 2R
=
(Rw'-M'-Fr)wolends +Lg[inWo+ MI/
an equivalent mass per unit length,
m(x, t). Wo Wo = 2Rm
T· w ~ lend
Tw'lend dO
m(iiu + vi; + ww) dO dx.
p(x, t). Wo = 2R
an equivalent applied bending moment,
(15)
with boundary condition 21TRNxx
Fx or
ito lend = O.
Equations (20) and (21) describe the equations
of motion in the radial direction of the leading
generator (0 = 0) and axial directions, respectively. Each equation is subjected to either force
or displacement boundary conditions; i.e., moments and equivalent shear forces or slopes and
radial deflections are specified in Eq. (20), while
Plastic Deformation of Cylindrical Shells
axial forces or axial displacements are specified
in Eq. (21).
Impulsive loading
In elasticity, the pressure loading can be expressed as an impulsive loading if the pulse duration of the pressure load impinging on the shell
is much less than the fundamental period of vi bration of the shell. In plasticity, the pressure loading
is considered as an impulsive loading if the pulse
duration is much shorter than the response time
of the shell. (Vibrations do not occur because
plastic work is dissipated instead of being stored
as in an elastic body.) The magnitude and distribution of the initial velocity of the shell is governed
by the impulse intensity, the shell impedance
(ph), and the shell geometry, outer radius, and
length.
To find the corresponding impulsive loading
I(x, 8), the pressure pulse is integrated in time
and the loading to the shell is introduced as an
initial shell velocity Vo(x, 8). The magnitude of
the initial velocity is calculated from the transfer
of linear momentum to the shell,
f'
p(x, 8, t) dt
= I(x, 8) = mVo(x, 8),
(22)
where I is the specific impulse with units pressure
time (not to be confused with an impulse with
units force time) and m = ph is the mass per unit
area or material impedance.
An equivalent impulse load I is then given by
I(x) =
f'
2R
r
p(x, 8, t)w(x, 8, t) d8 dt
(23)
Neglect of Axial Deformation
If we confine our analysis to a plastic foundation
with an infinite shear resistance but finite compressive resistance q, u = 0 and consequently,
if = u = O.
Setting if = 0 in Eq. (19) gives only an equation
of motion for the radial deflection of the leading
generator
mwo
+ Mil
-
(Nw~)'
with boundary conditions
M=T.
+ q = p,
Nw~
(24)
- M' = Fr and
173
The above equation of motion is recognized as
the rigid-plastic beam equation with finite deflections. No rigorous theoretical methods have been
proposed for solving finite deflections of a rigidplastic beam. Several approximate solutions,
which are in good agreement with experimental
results, were proposed by Jones (1971) and Vaziri
et al. (1987). Rigorous analytical solutions for limiting cases of Eq. (24) do exist and these will be
explained below.
Beam-on-Foundation
When deflections are infinitesimal, the equivalent
axial membrane force is negligible compared to
the equivalent axial bending moment. Omitting
the (Nw~)' term in Eq. (24) gives
(25)
subject to the boundary conditions Nw~ - M' =
and M = T. Yu and Stronge (1990) used the
above equation to derive solutions for the transient deformation of cylinders subject to projectile impact. When shell deformations become
large, they included a membrane factor to account
for axial membrane forces in an approximate way.
Fr
String-on-Foundation
When the plastic deformation of an axially restained shell are finite, axial membrane forces can
no longer be ignored. The axial bending moment
dominates the shell response during infinitesimal
deflection, but it becomes less significant when
compared to the axial membrane force as the shell
deflections increase. Haythornwaite (1961) demonstrated that a fully clamped rigid-plastic beam
will enter a membrane state when the beam deflections are of the order of the thickness of the
beam. A similar phenomenon is assumed to take
place for the rigid-plastic shell. Neglecting the
axial bending moment in Eq. (24) gives
mw" - (Nw~)'
+ q = p,
(26)
subject to the boundary condition Nw ~ = Fr. In
the following sections, we present a solution for
the cylinder in a purely membrane state and compare the analytical predictions to DYNA 3D results.
174
Hoo Fatt et al.
STRING-ON-FOUNDATION SUBJECT TO
IMPULSIVE LOADING
(32)
with boundary conditions
As an example, consider a fully-clamped cylinder
of finite length 2L. The cylinder is subject to
asymmetric impulsive loading. The circumferential distribution of the impulsive load is a cosine
function on the upper half of the shell circumference. Two impulsive load distributions in the
axial direction are considered, a parabolic distribution and a uniform distribution. The shell undergoes radial deformation w(x, (), t), where x and
() denote the axial and circumferential coordinates
and t denotes time.
Based on the string-on-foundation analogy for
the shell, the equation for the plastic deformation
of the leading generator of the shell «() = 0) under
impulsive loading is
= 0 at x = 0
Wi
(33)
and
W= 0
at
x=
1,
(34)
0
(35)
and initial condiions
W = 0
at I
=
and
Vex) at I
Wi =
0,
=
where the normalized velocity is
(36)
V
(eDi)·
The shell is clamped at both ends so that Eq. (27)
is subject to the boundary conditions
w~
= 0 atx = 0
Eigenfunction Expansion
Reduce the problem into a homogeneous system
of equations by assuming a solution of the form
(28)
and
(37)
The homogeneous system is
W0
= 0 at x =
± L.
(29)
The initial-boundary partial differential equation
is also subject to the initial conditions
Wo
=0
at!
=0
(38)
with boundary conditions
<l>i
(30)
0 at
=
x=
0
(39)
1,
(40)
and
and
<I>
(31)
where Vo(x) is the initial velocity distribution
along the length of the shell.
It is assumed for simplicity that equivalent
functions are constant. The initial-boundary
value problem can then be expressed in terms of
the following normalized variables:
1. x = xlL, axial coordinate
2. I = telL, time
3. W = woN/L 2 q, transverse deflection
where e = YNlm is the plastic wave speed in
the string.
Denoting derivatives with respect to the normalized variables gives
=
0 at
x=
and initial conditions
(41)
and
<l>i
=
H(x)
at I
=
0,
(42)
where j is the amplitude of the dimensionless
impUlse andf(x) is the axial distribution of the impulse.
Equation (39) is automatically satisfied if
oc
<I> =
L [An sin(Ani) + Bn COS(Ant)] cos (An x).
n=\
(43)
Plastic Deformation of Cylindrical Shells
The eigenvalues are determined from condition
(40) so that
cos An = 0 or An = (211 - 1)rr/2, for n = 1, 2, 3,. . . (44)
The solution is thus
The eigenfunction coefficients are found from the
initial conditions, Egs. (41) and (42),
~ Bn COS(AnX) = !(1 - X2)
(46)
n~l
and
~ AnA" COS(AnX) = iJ(x).
175
0, ei 7"- 0). Full unloading takes place when both
components are zero.
An exact unloading analysis was performed by
Suliciu et al. (1995) in a related problem of an
infinite string on a plastic foundation loaded impulsively. Using the method of characteristics,
several regions were identified in the phase plane
(x, 1). The analysis was complicated and involved
propagation of rigid zones into an already deformed plastic string.
The present solution methodology, based on
the eigenvalue expansion method, covers a fixed
length of the beam and precludes the application
of the rigorous unloading analysis. Instead, an
approximate and more restrictive unloading criterion is proposed.
The solution in the loading region, Eg. (50), is
expressed in terms of an infinite series of modal
function COS(AnX) and variable coefficients wn(i)
x
(47)
w(x, l) = ~ wn(i) COS(AnX).
n~l
(51)
n~l
The value of Bn is
(48)
The value of An depends on the axial distribution of the impulse, !(X) ,
ifj(x) = 1 - X2
(49)
if!(x) = 1.
Using!(1 - X2) = L~~l Bn COS(AnX), we can
also express Eg. (45) as
For impulsive loading with expansion coefficients
specified by Egs. (48) and (49), the amplitudes
wn(i) are diminishing functions oftime. Each amplitude reaches a maximum value when the corresponding velocity vanishes
(52)
It can be shown that higher modes decay more
rapidly than the lower ones. It is assumed that
each mode contributes to the final deflection of
the structure only in the time 0 < i < in'
[An sin(Ani)
wn(i)
=
{
+ Bn[COS(Ani) -
1]] COS(AnX).
- 1]],
forO < i < in
o
W = ~ [An Sin(AJ)
+ Bn[COS(Ani)
(53)
for i > in'
(50)
n=l
Unloading and Final Deformation
The generalized strain rates, i.e., strain rate and
velocity rate, in the string-on-foundation model
are ei, Wi, where Si = Wi Wii. The unloading condition is formulated in the space of the strain rate
vector. One can distinguish two cases of partial
unloading and full unloading. Partial unloading
occurs when only one component of the generalized strain rate vanishes (e t = 0, Wi 7"- 0 or Wi =
where in is defined by Eg. (52).
According to the above criterion, all modes
contributes to the shell response early on. Later
only the lower modes survive and the motion
ends with the fundamental mode. This criterion
of progressive switching off of higher modes has
many advantages. It confirms the property of
mode convergence proven by Martin and Symonds (1966) for general rigid, perfectly plastic
structures. It also leads to a much desired closedform solution for the final deflection, giving realistic permanent shapes of the deformed shell. Fi-
Hoo Fatt et al.
176
nally, it eliminates formation and propagation of
rigid zones because all points of the structure are
brought to rest at the same time in the terminal
phase of the shell motion. The unloading criterion
was first formulated by Wierzbicki (1972) for viscoplastic structures, and later modified by Wierzbicki (1974) for rigid, perfectly plastic structures.
Differentiating Eq. (50) with respect to i gives
x
Wi =
2: [AnAn cos(Anl) -
BnAn sin(Ani)] cos(An
n~1
x).
(54)
Setting Eq. (54) equal to zero signifies that each
mode unloads when
(55)
or at a characteristic time in
(56)
The above unloading criterion satisfies both conditions (ei = 0 and Wi = 0). A closed-form expression for the final deformation profile is obtained
by using trigonometric relations to give
The solution with an initial velocity distribution
that is parabolic converges more rapidly than that
with a uniform distribution. The rate of convergence for the parabolic distribution is of the order
l/A~ while that for the uniform is only of the order
of IIA~. Simple closed-form expressions for very
large impulses may be derived for the series solutions in Eqs. (60) and (61).
Approximation Solutions
Previous analysis shows that a one-term approximation for the central deflection of the shell is
within 5% of an eigenfunction solution if 1 > 1.
(The eigenfunction solution was set to be within
a convergence tolerance of 10- 6 , see Liao, 1993.)
Assuming a one-term approximation, we get Al =
7T12 and
The corresponding closed-form expression for
the final central deflection is
(57)
and
(58)
The series solution in Eq. (61) does not converge as rapidly as that for a parabolically distributed impulse. However, for very large impUlses,
the term V(A~j2 + 1) - 1-'> A), and Eq. (61) may
be rewritten as
(64)
Substituting these into Eq. (50) gives an expression for the final deformation profile
wf =
x
2: [V(A~ + B~) -
Bnlcos(Anx).
(59)
When 1 > 10, an approximation to the 50-term
series solution in Eq. (64) is
n~1
(65)
For the parabolic distribution, the above equation
reduces to
and the central deflection is
for the uniform distribution, we get
It is interesting to note that when the above expression is rewritten in unnormalized quantities,
the solution for Of is independent q.
Plastic Deformation of Cylindrical Shells
SUMMARY OF DYNA 3D RESULTS
Moussouros and Koenig (1994) have produced
DYNA 3D solutions for the impulsively loaded
6061-T6 aluminum shell using the BelytschkoTsai 5 degree-of-freedom elements with no inplane torsional components.
The shell geometry was assumed to be a perfectly circular cylinder loaded with an asymmetric radial impUlsive load. The (T - e relationship
of 6061-T6 Al material was assumed to be bilinear,
i.e., linear elastic, linear strain hardening with the
following material properties:
1. E = 10.8(106) psi, Young's modulus
2. (Ty = 41,600 psi, yield strength
3. Ep = 161,000 psi, linear strain-hardening
modulus
4. p = 2.6(10- 4) lb m/in. 3 , density.
The bilinear approximation for the (T - e curve
is an idealization of the actual (T - e. For ductile
materials, the plastic modulus decreases with increasing strain and the material fractures at a finite value of strain. The plastic strain was extended to 80% (corresponding to a stress of
170,400 psi), even though the shell would fracture
before attaining a strain at this value. No fracture
criterion was introduced in the numerical simulation because the sole purpose of the numerical
exercise was to test the rigid-plastic prediction of
the large plastic deformation of the shell.
Several test cases were examined and these
are summarized in Table 1. In all cases the peak
velocity was 9,670 in./s, except for the first test
case where it was set to be 50% higher than the
rest, i.e., Vo = 14,505 in./s. The first test case
has a parabolically distributed impUlse and setting
the peak velocity at 14,505 in./s results in the
same "total" impulse (area under the mass times
velocity curve) for Tests 1 and 4.
Table 1.
Test
1
2
3
4
5
177
COMPARISON BETWEEN ANALYTICAL
AND DYNA 3D SOLUTIONS
Equivalent functions m, N, and q depend on the
mode of plastic collapse of the ring. Cline and
lahsman (1967) found that a ring subjected to a
cosine impulse distribution over its upper half
collapses in two stages: a "short-time response,"
when the plastic work dissipated is predominantly
due to membrane compression, and a "long-time
response," when the plastic work dissipated is
predominantly due to bending at plastic hinges.
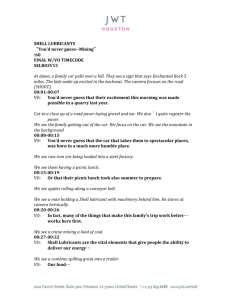
As shown in Fig. 2, the ring is a membrane mode
of plastic collapse during the short-time response
and a bending mode during the long-time response. The transition from one mode to the other
and lor the interaction of both modes were not
addressed by Cline and lahsman, and will be a
topic for future research.
For the particular load cases considered in the
DYNA 3D analysis, the ring collapses in the membrane mode. A flow stress of (To = 45,000 psi is
used in evaluating equivalent functions for the
6061-T6 aluminum shell in Appendix A. The corresponding values of the equivalent functions are
1. m = 6.1(10)-4Ib m/in., equivalent mass
2. N = 106,030 lb, equivalent tensile force
3. q = 22,500 lb/in., equivalent ring crushing resistance.
The permanent centerline deflection of the
shell for all five numerical test cases are compared
to the rigid-plastic approximations of them in
Table 2. In all cases the analytical predictions
are within 25% of numerical results. Test 1 involving a parabolic load distribution of Vo =
14,505 in./s has a much higher deformation than
Test 4, involving a uniform load distribution with
the same total initial impulse. This was expected
because the parabolic load is greatest at the centerline.
Description of Numerical Test Cases
Radius
R (in.)
Thickness
h (in.)
Half-Length
L (in.)
Dlh
Axial Load
Distribution
Impulse Velocity
Vo (in. Is)
6
6
6
6
6
0.25
0.25
0.25
0.25
0.25
2
2
4
2
4
48
48
48
48
48
Parabolic
Parabolic
Parabolic
Uniform
Uniform
14,505
9,670
9,670
9,670
9,670
178
Hoo Fatt et al.
Bending Mode
(long-time response)
Membrane Mode
(short-time response)
FIGURE 2
Plastic collapse of ring in membrane and bending modes.
Calculations show that, for the given diameter
to thickness ratio of the shells considered by
DYNA 3D, the equivalent ring crushing resistance, i.e., the equivalent plastic foundation
force, in a bending mode is 2 orders of magnitude
less than that in a membrane mode. An equivalent
ring crushing resistance that assumes both membrane and bending modes would therefore be
lower than one calculated with only a membrane
mode. This explains why analytical predictions
were less than the numerical solutions. In calculating equivalent functions, the bending mode
during the long-time response of the shell was
ignored, and the resulting foundation force is stiffer. A plastic collapse ring model that assumes
both membrane and bending modes should bring
analytical predictions closer to the numerical results.
The analytical predictions of the transient and
final deflection profiles of the shell in the circumferential and longitudinal direction for Test 4 are
compared to the numerical predictions in Figs. 3
and 4. The shell undergoes about 10% circumferential compression on the upper half of its circumference so that a considerable amount of plastic
work is dissipated during hoop compression. The
analytical predictions of the transient deflections
Table 2.
Test
1
2
3
4
5
in the circumferential and longitudinal directions
at t = 46.9 fLS and 92.8 fLS, respectively, are within
5% of the DYNA 3D predictions. To compare
analytical and numerical predictions of the final
deformed profiles, it was assumed that the elastic
vibrations in the DYNA 3D analysis attenuated
completely at t = 138.6 fLS. The rigid-plastic approximation for the final deformation is within
25% of the DYNA 3D prediction of the shell deformation at t = 138.6 fLS.
A comparison between the rigid-plastic approximation and the numerical solution of the
transient response of the maximum centerline deflection for Tests 2 and 4 are also shown in Fig.
5. Plastic unloading in the rigid-plastic approximation occurs near the first overshoot of the elastic shell vibrations. The predicted plastic response times of the shell are within 10% of the
numerical predictions (measured by the time at
the first overshoot of the elastic shell vibrations).
CONCLUDING REMARKS
A theoretical approach for predicting the plastic
deformation of a cylindrical shell subject to asymmetric dynamic loads was developed and com-
Comparison of DYNA 3D and Analytical Results
j
= VoNlcLq
2.61
1.74
0.87
1.74
0.87
Analytical or =
Bf L 2qlN (in.)
Numerical
of (in.)
% U nderprediction
1.08
0.62
0.86
0.75
1.06
1.20
0.77
1.14
0.97
1.30
-10
-19
-25
-23
-18
Plastic Deformation of Cylindrical Shells
t = 92.8 microsec
179
1.6
[in]
- - - - Rigid-Plastic Approximation
1.4
- - DYNA 3D Prediction
1.2
~1
~~ 0.8
~
is
-2
- - - - Rigid-Plastic Approximation
t = 138.6 microsec
------~ 7=- ==~ , " ~nal
t = 92.8 microsec
~0.6
a:
0.4 ~-~-~-~-~-~-~-c;=\~--.--=--~-~--~-~-~-
- - DYNA 3D Prediction
-4
Deformation
' : : - -\ , _
---
~~
_
t = 46.9 microsec
0.2
-60~~--------~----------~10~--------~15
oL-~
o
[in]
__
0.2
~
__
0.4
~
__
0.6
~
__
~
__
~
__
0.8
1
1.2
Axial Length [in]
,
L-~
1.4
,,
_ _ ~_ _ ~
1.6
1.8
FIGURE 3 Circumferential deflection profile at x =
= 9670 in. Is,
2R = 12 in., 2L = 4 in., h = 0.25 in.
FIGURE 4 Transient and final deflection profile of
the leading generator of the shell. Test 4: uniform velocity = 9670 in./s, 2R = 12 in., 2L = 4 in., h = 0.25 in.
pared to numerical results from DYNA 3D. The
plastic deformation of the shell was found by solving for the transverse deflections of a rigid-plastic
beam/string-on-foundation. As an example, the
deformation of a cylindrical shell subject to impulsive loading was predicted by finding the solution
of the transient and final deformations of a stringon-foundation. Equivalent functions for the
string-on-foundation were evaluated using a
membrane mode plastic collapse mechanism for
the shell. The analytical predictions of the centerline shell deflection underpredicted the DYNA
3D results by 25%. The discrepancy between the
analytical and numerical solutions was attributed
to neglecting the bending mode or long-time response of the shell. A plastic collapse ring model
that assumes both membrane and bending phases
would result in a reduction of the equivalent
crushing resistance of the shell and should increase analytical predictions, bringing them
closer to the numerical results. Analyzing plastic
collapse of a ring in combined membrane and
bending modes will be the subject of future research.
is described by a cosine distribution
o of the shell. Test 4: uniform velocity
(A. I)
Velocity and accelerations fields are similarly described by cosine distributions, w(6) = wocos 6
and w(6) = wocos 6.
To evaluate the fully plastic bending moments
and tensile forces, assume a limited interaction
yield curve
1.2
=9670 in/s,
= 12 in, 2L =4 in, h =0.25 in
Test 4: Uniform Velocity
2R
,
, -------------------------\--r-------------------=9670 in/s,
= 12 in, 2L =4 in, h =0.25 in
Test 2: Parabolic Velocity
l'
2R
~ 0.4
o
- - - - Rigid-Plastic Approximation
- - OYNA 3D Prediction
APPENDIX A: EQUIVALENT FUNCTIONS
Time [sec]
Equivalent functions for the impulsively loaded
shell are calculated for the membrane mode plastic collapse mechanism shown in Fig. 2.
Following Cline and lahsman (1967), the deformation in the upper half of the shell circumference
FIGURE 5 Transient centerline deflection of the
leading generator of the shell for shells. Test 2: parabolic velocity = 9670 in./s, 2R = 12 in., 2L = 4 in.,
h = 0.25 in. Test 4: uniform velocity = 9670 in./s,
2R = 12 in., 2L = 4 in., h = 0.25 in.
180
Hoo Fatt et al.
where Mp[ = U' o h 2/4 is the fully plastic bending
moment per unit length and Np[ = U'oh is the fully
plastic axial force per unit length.
With the above distribution, Eq. (A. I), and
value for N p[' the equivalent mass and tensile
force, defined by Eqs. (11) and (14), are
m = 2Rm
r
cos 2e de = nRph/2
equivalent mass per unit length and
N
=
2RNp[
r
o
cos 2e de
=
7TRU' oh12
equivalent tensile force.
The equivalent ring resistance depends on the
plastic work dissipated in membrane compression
(A.3)
Neglecting tangential component and higher order terms, one can approximate the hoop strain
rate as
. _{i
e88 -
0,
cos
e,
for
lei < 7T/2
(A.4)
otherwise.
Substituting Eq. (A.4) into Eq. (A.3) and integrating give
(A.S)
The authors would like to thank Dr. Geoffrey Main for
supporting this project under ONR Grant NOOO 14-941-1026 to the Massachusetts Institute of Technology.
REFERENCES
Brush, D.O., and Almroth, B. 0.,1975, "Strain Localization and Fracture in Metal Sheets and ThinWalled Structures," in Buckling ofBars , Plates, and
Shells, McGraw-Hill, New York.
Cline, G. B., and Jahsman, W. E., 1967, "Response
of a Rigid-Plastic Ring to Impulsive Loading," Journal of Applied Mechanics, Vol. 89, pp. 329-336.
Greenspon, J. E., 1970, "Theoretical Calculation of
Iso-Damage Characteristics, " Ballistic Research
Laboratory, J. G. Eng. Res Assoc., Technical Report
No. 10, February.
Haythornwaite, R. M., 1961, "Mode Change During
the Plastic Collapse of Beams and Plates," in Developments in Mechanics, Proceedings of the 7th Midwestern Mechanics Conference,Vol. 1, J. E. Lay
and L. E. Malvern, pp. 203-215.
Jiang, J., and Olson, M. D., 1991, "Nonlinear Dynamic
Analysis of Blast Loaded Cylindrical Shell Structures," Computers & Structures, Vol. 41, No.1,
pp. 41-52.
Jones, N., 1971, "A Theoretical Study of the Dynamic
Plastic Behavior of Beams and Plates with Finite
Deflections," International Journal of Solids and
Structures, Vol. 7, pp. 1007-1029.
Liao, S.-W., 1993, "Dynamic Failure of Cylindrical
Shells," Final report for the Master of Science degree program in the Naval Architecture and Offshore
Engineering Department, University of California,
Berkeley.
Martin, J. B., and Symonds, P. S., 1966, "Mode Approximation for Impulsively Loaded Rigid-Plastic
Structures," Journal of the Engineering Mechanics
Division, Proceedings ASCE, Vol. 92, No. EM5,
pp.43-66.
Moussouros, M., and Hoo Fatt, M. S., 1995, "Effect
of Shear on Plastic Denting of Cylinders," International Journal of Mechanical Sciences, Vol. 37, No.
4, pp. 355-371.
Moussouros, M., and Koenig, J., 1994, "Validation of
Rigid-Plastic Model for the Dynamic Response of a
6061-T6 Aluminum Shell Subject to ImpUlsive Loading Using DYNA 3D," Personal Communications,
NSWC, White Oak.
Reid, S. R., 1978, "Influence of Geometrical Parameters on the Mode of Collapse of a "Pinched" RigidPlastic Cylindrical Shell," International Journal of
Solids and Structures, Vol. 14, pp. 1027-1043.
Stricklin, J. A., Haisler, W. E., and von Riesemann,
W. A., 1974, "Large Deflection Elastic-Plastic Dynamic Response of Stiffened Shells of Revolution,"
Journal of Pressure Vessel Technology," May,
pp. 87-95.
Suliciu, M. M., Suliciu, 1., Wierzbicki, T., and Hoo
Fatt, M. S., 1996, "Transient Response of an Impulsively Loaded Plastic String on a Plastic Foundation," Quarterly Applied Mathematics, to appear.
Underwood, P., 1972, "Transient Response of Inelastic Shells of Revolution," Computers & Structures,
Vol. 2, pp. 975-989.
Vaziri, R., Olson, M. D., and Anderson, D. L., 1987,
"Dynamic Response of Axially Constrained Plastic
Beams to Blast Loads," International Journal of
Solids and Structures, Vol. 23, No.1, pp. 153-174.
Wierzbicki, T., 1972, "An Approximate Linear Theory
of Thin Viscoplastic Shells," Archives ofMechanics,
Vol. 24, No. 5-6, pp. 941-953.
Plastic Deformation of Cylindrical Shells
Wierzbicki, T., 1974, "Application of an Eigenfunction
Expansion Method in Plasticity," Journal ofApplied
Mechanics, Vol. 41, No.2, pp. 448-452.
Wierzbicki, T. and Suh, M. S., 1988, "Indentation of
Tubes Under Combined Loading," International
Journal of Mechanical Science, Vol. 30, No. 3/4,
pp. 229-248.
Witmer, E. A., Herrmann, W., Leech, J. W., and Pian,
181
T. H. H., 1960, "Responses of Plates and Shells to
Intense External Loads of Short Duration," Massachusetts Institute of Technology Technical Report
WADD TR 60-433, April.
Yu, T. X., and Stronge, W., 1990, "Large Deflection of
a Rigid-Plastic Beam-on-Foundation from Impact,"
International Journal of Impact Engineering, Vol.
9, pp. 115-126.