Recap from last class Hardware support Dynamic power management
advertisement

Recap from last class
Hardware support
CMOS power consumption and features
Clock gating
Supply shutdown
Dynamic voltage scaling
Dynamic power management
Energy conservation and performance
Adjusts power mode to adapt to workload variations
Baseline: greedy policy
Break-even time TBE
ECE 455/555 Embedded System Design
1
ECE 455/555
Embedded System Design
Power Management - II
Wei Gao
Fall 2015
2
Break-Even Time TBE
Definition
Minimum idle time required to compensate the cost of entering an
inactive state
• Cost: transition time and extra power
Enter an inactive state is beneficial only if idle time is longer
than the break-even time
Break-even time can be viewed as transition overhead
Ex. going to Hawaii is worthwhile only if vacation is long enough
Assumptions
Cannot delay workload to extend idle time
An ideal power manager (PM) knows how long the idle time is going to
be
ECE 455/555 Embedded System Design
3
Energy Saving Calculation
Given an idle period Tidle > TBE
ES(Tidle) = (Tidle - TTR)(POn - POFF) + TTR(POn – PTR)
• POn > PTR: total = idle saving + transition saving
• POn < PTR: total = idle saving - transition cost
Achievable power saving depends on workload!
Distribution of idle periods
ECE 455/555 Embedded System Design
4
Predictive Techniques
Don’t know how long the idle time will be?
Predict whether idle time Tidle > TBE based on history
Ex: someone takes break once an hour?
Predicted event: p = {Tidle > TBE}
Observed event: o
• Triggers state transition: RUN -> IDLE/SLEEP
ECE 455/555 Embedded System Design
5
Metrics of Prediction Quality
Safety: conditional probability Prob(p|o)
If an observed event happens, what’s the probability of Tidle > TBE?
Ideally, safety = 1.
Efficiency: Prob(o|p)
If Tidle > TBE, what’s the probability of successfully predicting it in
advance (e.g., o happens)?
Overprediction
State transition too much
High performance penalty poor safety
Underprediction
State transition not enough
Wastes energy poor efficiency
ECE 455/555 Embedded System Design
6
Fixed Timeout Policy
Enter inactive state when the system has been idle
for TTO sec.
o: Tidle > TTO
Wake up in response to activity
Assumption: If a system has been idle for TTO sec, it is
likely that it will continue to be idle for Tidle-TTO > TBE.
ECE 455/555 Embedded System Design
7
Selecting Best Timeout TTO
Increasing TTO improves safety, but reduces efficiency
at the same time
Safety: Pr(Tidle>TTO+TBE | Tidle > TTO)
Highly workload dependent
Karlin’s result: TTO = TBE
Energy consumption is at worst twice the energy
consumed by an ideal policy
ECE 455/555 Embedded System Design
8
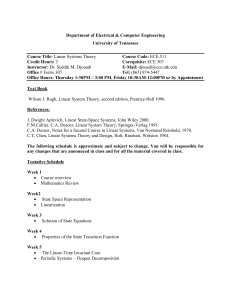
Impact of Timeout Threshold
Safety and efficiency as functions
of timeout for the games workload
(break-even time is 160ms)
Power saving as a function of
timeout
ECE 455/555 Embedded System Design
9
Critiques on Fixed Timeout
Simple!
How to set timeout threshold?
Tradeoff between safety and efficiency
Works best when workload trace is available
Always waste energy before reaching the timeout
threshold
Solution: Predictive shutdown
Always incur performance penalty for wake up
Solution: Predictive wakeup
ECE 455/555 Embedded System Design
10
Possible Improvement
Predictive shutdown: shutdown immediately when
an idle period starts
Avoid wasting energy before reaching the timeout
threshold
More efficient, less safe
Predictive wakeup: wake up before the predicted idle
time expires, even if no new activity has occurred.
Avoid performance penalty for wake up
Less efficient, safer
ECE 455/555 Embedded System Design
11
Predictive Shutdown: Threshold-based
Policy
Observation: short active period tends to be followed
by a long idle period
If the preceding active period is less than a threshold,
the idle period is predicted to be longer than TBE.
Again, what is the right threshold?
Highly workload dependent
Require offline analysis
ECE 455/555 Embedded System Design
12
Critiques: History-based Predictors
Applicability and performance depend on short-term
correlation between past & future events
True in many workloads
Predictor fails when correlation is weak
Workload in many embedded systems are more
predictable than PCs
Periodic tasks
Workload known a priori
Specialized application
ECE 455/555 Embedded System Design
13
More
Stochastic control: based on statistical models (e.g.,
Markov chain)
Read this required paper
L. Benini, A. Bogliolo and G. De Micheli, "A Survey of
Design Techniques for System-Level Dynamic Power
Management,” IEEE Transactions on VLSI, pp. 299-316,
June 2000.
ECE 455/555 Embedded System Design
14
Outline
Hardware support
Power management policy
Power manager
Holistic approach
ECE 455/555 Embedded System Design
15
Power Manager
Power manager is usually implemented in software
(OS) for flexibility
Hardware and software co-design
Software implements policy
Hardware implements power change mechanisms
Need standard interfaces to deal with hardware
diversity
Different vendors
Different devices: processor, sensor, controller …
ECE 455/555 Embedded System Design
16
Advanced Configuration and Power
Interface (ACPI)
Open standard for power management services.
Proposed by Intel, Microsoft and Toshiba
applications
device
drivers
OS kernel
ACPI Driver
Hardware platform
devices, processor, chipset
power
management
ACPI drivers
1. Kernel requests
ACPI commands
2. ACPI messages
Kernel interrupts
ECE 455/555 Embedded System Design
17
ACPI System States
System components
Min Power
Global sleep states
High wake-up
latency
Global states
Processor states
Mechanical
off
Low latency
context loss
Soft off
OS reboot
Context loss
for CPU/cache
Sleeping
Low latency
No context loss
Device states
Working
Max Power
Used as contracts between hardware and OS vendors
ECE 455/555 Embedded System Design
18
ACPI Global Power States
G3: mechanical off – no power consumption
G2: soft off – restore requires full OS reboot
G1: sleeping state
S1: low wake-up latency with no loss of context
S2: low latency with loss of CPU/cache state
S3: low latency with loss of all state except memory
S4: lowest-power state with all devices off
G0: working state
ECE 455/555 Embedded System Design
19
Outline
Hardware support
Power management policy
Power manager
Holistic approach
ECE 455/555 Embedded System Design
20
Holistic View of Power Consumption
Instruction execution (CPU)
Cache (instruction, data)
Main memory
Other: non-volatile memory, display, network
interface, I/O devices
ECE 455/555 Embedded System Design
21
Sources of Energy Consumption
Relative energy per operation
Relative energy per operation (Catthoor et al):
33
30
20
20
9
10
1
3.6
4.4
0
16-bit
add
16-bit 8x128x16 8x128x16 External
multiply
SRAM
SRAM
I/O
read
write
access
16-bit
memory
transfer
Memory transfer is the most expensive operation
Biggest energy optimization comes from properly organizing memory
Energy consumption: memory > caches > registers
ECE 455/555 Embedded System Design
22
Memory Power Optimization
Memory controllers put idle memory modules into
low-power mode
Minimize the number of active memory modules
Data placement
• Allocate new memory pages only to active memory modules
Memory address mapping
• Map consecutive memory address to a single controller
Memory compression
• Compress data in multiple memory modules to one module
ECE 455/555 Embedded System Design
23
Cache Behavior
Cache behavior is important
Energy consumption has a sweet spot as cache size
changes:
cache too small: program thrashes, burning energy on
external memory accesses;
cache too large: cache itself burns too much power.
ECE 455/555 Embedded System Design
24
Optimization for Power
Reduce memory footprint
Reduce code size
Find correct cache size
Analyze cache behavior (size of working set)
Minimize memory and cache access
Use registers efficiently less cache access
Identify and eliminate cache conflicts less memory
access
Better performance More idle time More
power saving by power management
ECE 455/555 Embedded System Design
25
Summary
Dynamic power management policy
Workload-independent metrics for energy saving calculation
Predictive techniques
• Fixed timeout policy
• Predictive shutdown and wakeup
Power manager
Advanced Configuration and Power Interface (ACPI)
Holistic approach
Memory system
Cache behavior
ECE 455/555 Embedded System Design
26
Reading
Textbook: 3.7, 6.9
Required: Sections I, II, III.A, III.B, IV of
L. Benini, A. Bogliolo and G. De Micheli, "A Survey of
Design Techniques for System-Level Dynamic Power
Management,” IEEE Transactions on VLSI, pp. 299316, June 2000.
ECE 455/555 Embedded System Design
27