Hopfield Network Lecture 20 h Positive Coupling
advertisement

Part 3: Autonomous Agents
11/1/07
Hopfield Network
•
•
•
•
•
Lecture 20
Symmetric weights: wij = wji
No self-action: wii = 0
Zero threshold: θ = 0
Bipolar states: si ∈ {–1, +1}
Discontinuous bipolar activation function:
$#1,
" ( h ) = sgn( h ) = %
&+1,
11/1/07
1
h<0
h>0
11/1/07
2
!
What to do about h = 0?
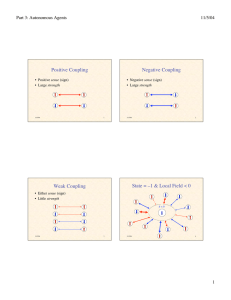
Positive Coupling
• There are several options:
• Positive sense (sign)
• Large strength
σ(0) = +1
σ(0) = –1
σ(0) = –1 or +1 with equal probability
hi = 0 ⇒ no state change (si′ = si)
• Not much difference, but be consistent
• Last option is slightly preferable, since
symmetric
11/1/07
3
11/1/07
Weak Coupling
Negative Coupling
• Either sense (sign)
• Little strength
• Negative sense (sign)
• Large strength
11/1/07
4
5
11/1/07
6
1
Part 3: Autonomous Agents
11/1/07
State = –1 & Local Field < 0
State = –1 & Local Field > 0
h<0
h>0
11/1/07
7
8
State Reverses
State = +1 & Local Field > 0
h>0
h>0
11/1/07
11/1/07
11/1/07
9
11/1/07
10
State = +1 & Local Field < 0
State Reverses
h<0
h<0
11
11/1/07
12
2
Part 3: Autonomous Agents
11/1/07
Hopfield Net as Soft Constraint
Satisfaction System
• States of neurons as yes/no decisions
• Weights represent soft constraints between
decisions
NetLogo Demonstration of
Hopfield State Updating
– hard constraints must be respected
– soft constraints have degrees of importance
• Decisions change to better respect
constraints
• Is there an optimal set of decisions that best
respects all constraints?
Run Hopfield-update.nlogo
11/1/07
13
11/1/07
14
Demonstration of Hopfield Net
Dynamics I
Demonstration of Hopfield Net
Dynamics II
Run Hopfield-dynamics.nlogo
Run initialized Hopfield.nlogo
11/1/07
15
16
Quantifying “Tension”
Convergence
• Does such a system converge to a stable
state?
• Under what conditions does it converge?
• There is a sense in which each step relaxes
the “tension” in the system
• But could a relaxation of one neuron lead to
greater tension in other places?
11/1/07
11/1/07
17
• If wij > 0, then si and sj want to have the same sign
(si sj = +1)
• If wij < 0, then si and sj want to have opposite
signs (si sj = –1)
• If wij = 0, their signs are independent
• Strength of interaction varies with |w ij|
• Define disharmony (“tension”) Dij between
neurons i and j:
Dij = – si wij sj
Dij < 0 ⇒ they are happy
Dij > 0 ⇒ they are unhappy
11/1/07
18
3
Part 3: Autonomous Agents
11/1/07
Review of Some Vector Notation
Total Energy of System
" x1 %
$ '
T
x = $ M ' = ( x1 L x n )
$ '
# xn &
The “energy” of the system is the total
“tension” (disharmony) in it:
E {s} = " Dij = #" si w ij s j
ij
n
x T y = # xi yi = x " y
!
= # 12 " " si w ij s j
j$i
j
x T My = "
= # 12 sT Ws
11/1/07
19
!
L
O
L
" x1 y1
$
xy T = $ M
$
# x m y1
!
= # 12 " " si w ij s j
i
(inner product)
i=1
ij
i
(column vectors)
m
i=1
"
n
j=1
x1 y n %
'
M '
'
xm yn &
(outer product)
x i M ij y j
(quadratic form)
11/1/07
20
!
!
Another View of Energy
Do State Changes Decrease Energy?
The energy measures the number of neurons
whose states are in disharmony with their
local fields (i.e. of opposite sign):
•
•
Suppose that neuron k changes state
Change of energy:
"E = E {s#} $ E {s}
= $% s#i w ij s#j + % si w ij s j
E {s} = " 12 # # si w ij s j
i
="
1
2
i
="
ij j
j$k
j
i i
i
1 T
2
!
=" s h
21
j$k
= "( s#k " sk )% w kj s j
!
#s h
11/1/07
ij
= "% s#k w kj s j + % sk w kj s j
#s #w s
i
1
2
ij
j
11/1/07
= "#sk hk
j$k
<0
22
!
!
!
!
Proof of Convergence
in Finite Time
Energy Does Not Increase
• In each step in which a neuron is considered
for update:
E{s(t + 1)} – E{s(t)} ≤ 0
• Energy cannot increase
• Energy decreases if any neuron changes
• Must it stop?
11/1/07
23
• There is a minimum possible energy:
– The number of possible states s ∈ {–1, +1}n is
finite
– Hence E min = min {E(s) | s ∈ {±1}n} exists
• Must show it is reached in a finite number
of steps
11/1/07
24
4
Part 3: Autonomous Agents
11/1/07
Steps are of a Certain Minimum Size
Conclusion
If hk > 0, then (let hmin = min of possible positive h)
')
+)
n
hk " min( h h = & w kj s j # s $ {±1} # h > 0, = df hmin
)*
)j%k
"E = #"sk hk = #2hk $ #2hmin
!
!
If hk < 0, then (let hmax = max of possible negative h)
)'
)+
n
hk " max( h h = & w kj s j # s $ {±1} # h < 0, = df hmax
j%k
*)
-)
• If we do asynchronous updating, the
Hopfield net must reach a stable, minimum
energy state in a finite number of updates
• This does not imply that it is a global
minimum
"E = #"sk hk = 2hk $ 2hmax
11/1/07
25
11/1/07
26
!
!
Lyapunov Functions
Example Limit Cycle with
Synchronous Updating
• A way of showing the convergence of discreteor continuous-time dynamical systems
• For discrete-time system:
– need a Lyapunov function E (“energy” of the state)
– E is bounded below (E{s} > Emin)
– ΔE < (ΔE)max ≤ 0 (energy decreases a certain
minimum amount each step)
– then the system will converge in finite time
w>0
w>0
• Problem: finding a suitable Lyapunov function
11/1/07
27
The Hopfield Energy Function is
Even
• A function f is odd if f (–x) = – f (x),
for all x
• A function f is even if f (–x) = f (x),
for all x
• Observe:
11/1/07
28
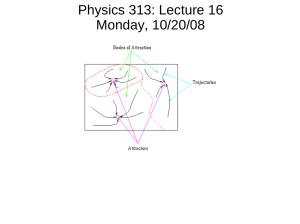
Conceptual
Picture of
Descent on
Energy
Surface
E {"s} = " 12 ("s) T W("s) = " 12 sT Ws = E {s}
11/1/07
29
11/1/07
(fig. from Solé & Goodwin)
30
!
5
Part 3: Autonomous Agents
11/1/07
Energy
Surface
+
Flow
Lines
Energy
Surface
11/1/07
(fig. from Haykin Neur. Netw.)
31
11/1/07
(fig. from Haykin Neur. Netw.)
32
Flow
Lines
Basins of
Attraction
11/1/07
(fig. from Haykin Neur. Netw.)
33
6