Observability of Speed in an Induction Motor II. M
advertisement

Proceedings of the
44th IEEE Conference on Decision and Control, and
the European Control Conference 2005
Seville, Spain, December 12-15, 2005
TuIB21.1
Observability of Speed in an Induction Motor
from Stator Currents and Voltages
Mengwei Li, John Chiasson, Marc Bodson, and Leon Tolbert
Abstract— This paper describes a new approach to estimating
the speed of an induction motor from the measured terminal
voltages and currents without the use of a speed/position sensor.
The new observer uses a purely algebraic speed estimator to
stabilize a dynamic speed estimator and it is shown that it has
the potential to provide low speed (including zero speed) control
of an induction motor under full rated load.
Index Terms— Sensorless Speed Observer, Induction Motor
II. M ATHEMATICAL M ODEL OF THE I NDUCTION M OTOR
A (two-phase equivalent) state-space mathematical model
of the induction motor (see [16][17]) written in space vector
form [9], by defining lV , lVd + mlVe , # U , # Ud + m# Ue ,
and xV , xVd + mxVe > is
g
1
(1 mqS $WU ) # U lV +
x
l =
gw V
WU
OV V
1
P
g
(1 mqS $WU ) # U +
l =
# =
gw U
WU
WU V
n
o
O
qs P
g$
Im lV # U =
gw
MOU
M
I. I NTRODUCTION
Sensorless control of an induction motor refers the problem of controlling it without the use of a rotor position/speed
sensor. Many different techniques have been proposed to
estimate speed of an induction motor without a speed sensor.
This area has a rather large literature and the reader is
referred to [1][2][3][4][5][6][7][8][9][10] for an exposition
of many of the existing approaches. The approach presented
in this work is most closely related to the ideas described
in [11][12][13][14][15]. In [11][12][13][14], observability
is characterized as being able to reconstruct the unknown
state variables as rational functions of the inputs, outputs,
and their derivatives (See [12][13][14] for a more precise
definition). We manage to obtain an algebraic expression for
the rotor speed in terms of the machine inputs, machine
outputs and their derivatives. In the systems theoretic approach considered in [15], the authors have shown that there
are indistinguishable trajectories of the induction motor, i.e.,
pairs of different state trajectories with the same input/output
behavior. That is, it is not possible to estimate the speed
based on stator measurements for arbitrary trajectories [15].
A similar circumstance is shown here due to the fact that
the "coefficients" of the algebraic expression for the speed
all happen to be zero for some trajectories. We characterize
a class of trajectories (or, modes of operation) from which
the speed of the machine can be estimated from the stator
currents and voltages. It is then shown how this speed
estimate can be used in a field-oriented controller with the
machine operating at low, or even zero, speed under full load.
M. Li, J. Chiasson, and L. M. Tolbert are with the ECE Department, University of Tennessee, Knoxville, TN 37996, mwl@utk.edu, chiasson@utk.edu, tolbert@utk.edu
M. Bodson is with the ECE Department, University of Utah, Salt Lake
City, UT 84112, bodson@ee.utah.edu.
L. M. Tolbert is also with Oak Ridge National Laboratory, Oak Ridge
TN. tolbertlm@ornl.gov
Drs. Chiasson and Tolbert would like to thank Oak Ridge National
Laboratory for partially supporting this work through the UT/Battelle
contract no. 4000007596. Dr. Tolbert would also like to thank the National
Science Foundation for partially supporting this work through contract NSF
ECS-0093884.
0-7803-9568-9/05/$20.00 ©2005 IEEE
(1)
(2)
(3)
where, is the position of the rotor, $ = g@gw> qs is the
number of pole pairs, lVd > lVe are the (two phase equivalent)
stator currents, and # Ud , # Ue are the (two phase equivalent)
rotor flux linkages, UV and UU are the stator and rotor
resistances, P is the mutual inductance, OV and OU are
the stator and rotor inductances, M is the inertia of the rotor,
and O is the load torque. The symbols
WU =
=
OU
UU
P
OV OU
=1
=
P2
OV OU
UV
1 1 P2
+
OV
OV WU OU
have been used to simplify the expressions. WU is referred to
as the rotor time constant while is called the total leakage
factor.
III. A LGEBRAIC S PEED O BSERVER
Differentiating (1) gives
g
g2
g$
g
l =
(1 mqS $WU ) # U mqS # U
lV
gw2 V WU
gw
gw
gw
1 g
+
(4)
x =
OV gw V
Using the complex-valued equations (1) and (2), one can
g
eliminate # U and # U from (4) to obtain
gw
µ
¶
1
g
1
g2
l =
(1 mqS $WU )
x
l + lV gw2 V
WU
gw V
OV V
g
1 g
P
+ 2 (1 mqS $WU ) lV lV +
x
WU
gw
OV gw V
µ
¶
g
g$
mqS WU
1
xV
lV + lV =
1 mqS $WU gw
OV
gw
(5)
3438
Solving (5) for g$@gw gives
At low speeds, defined by |t2 $| ¿ |t1 | > equation (9) reduces
(1 mqS $WU )2 1 mqS $WU
g$
+
×
=
gw
mqS WU2
mqS WU
g
1 g
g2
P
(1
mq
$W
)
l
+
l
l
x
S
U
V
V
V
WU2
gw
OV gw
gw2 V
=
1
g
xV
lV + lV gw
OV
(6)
If the signals are measured exactly and the dynamic model
is correct, the right-hand side must be real. From (1) it is
seen that the denominator in the last term of (6) is equal to
(@WU ) (1 mqS $WU ) # U and thus (6) is ¯singular
(i.e., the
¯
¯ ¯
denominator in (6) is zero), if and only if ¯# U ¯ 0.
Breaking down the right-hand side of (6) into its real and
imaginary parts, the real part has the form
g$
= d2 (xVd > xVe > lVd > lVe ) $ 2 + d1 (xVd > xVe > lVd > lVe ) $
gw
(7)
+ d0 (xVd > xVe > lVd > lVe ) =
The
expressions
for
d2 (xVd > xVe > lVd > lVe ) >
d1 (xVd > xVe > lVd > lVe ) > and d0 (xVd > xVe > lVd > lVe ) are
lengthy and therefore not explicitly presented here
(Appendix VII-B gives their steady-state expressions). It is
shown in Appendix VII-C that (7) is never stable in steady
state.
On the other hand, the imaginary part of (6) has no
derivatives in the speed leading to a 2qg degree polynomial
equation in $ of the form
t($) , t2 (xVd > xVe > lVd > lVe )$ 2 + t1 (xVd > xVe > lVd > lVe )$
+ t0 (xVd > xVe > lVd > lVe )=
(8)
If $ is the speed of the motor, then t($) is zero. The expressions for t2 (xVd > xVe > lVd > lVe )> t1 (xVd > xVe > lVd > lVe ) >
and t0 (xVd > xVe > lVd > lVe ) are lengthy and not explicitly
presented here (Their steady-state expressions are given in
Appendix VII-A.). There are two solutions to equation (8)
and at least one of these two solutions must track the motor
speed. This equation does not have any stability issue, but a
procedure is required to determine which of the two solutions
is correct. Further, there are situations when the speed cannot
be determined by (8). For example, if xVd = constant
and xVe = 0, it turns out that t2 (xVd > xVe > lVd > lVe ) =
t1 (xVd > xVe > lVd > lVe ) = t0 (xVd > xVe > lVd > lVe ) 0 and $ is
not determinable from (8)1 . On the other hand, if the machine
is operated at zero speed ($ 0) with a load on it, then
t2 (xVd > xVe > lVd > lVe ) 0 and t1 (xVd > xVe > lVd > lVe ) 6= 0>
and a unique solution is specified by (8) (see Appendix VIIA where this is proved in steady state). In fact, for low speed
trajectories, consider equation (8) written in the form
(t2 $ + t1 ) $ + t0 = 0=
(9)
1 An induction machine is not typically operated under these conditions.
See [15] for more discussion of this issue.
t1 $ + t0 = 0
and $ is uniquely determined by $ = t0 @t1 = Appendix VII-B shows that, in steady state, |t2 $| ¿ |t1 | if
2
(WU qs $) ¿ 1=
If t2 (xVd > xVe > lVd > lVe ) 6= 0> one determines the correct
solution of (8) as follows: Differentiate equation (8) to
obtain the new independent equation
(2t2 $ + t1 )
g$
+ ṫ2 $ 2 + ṫ1 $ + ṫ0 0=
gw
(10)
Next, g$@gw is replaced by the right-hand side of equation
(7) to obtain a new algebraic polynomial equation in $ given
by
j($) , 2t2 d2 $ 3 + (2t2 d1 + t1 d2 + ṫ2 ) $ 2
+ (2t2 d0 + t1 d1 + ṫ1 ) $ + t1 d0 + ṫ0 =
(11)
j($) is a third-order polynomial equation in $ for which the
speed of the motor is one of its zeros. Dividing2 (11) by
t($) from (8), the polynomial (11) has the form
j($) = (2t2 d2 $ + 2t2 d1 t2 t1 d2 + ṫ2 ) t($)
+ u1 (xVd > xVe > lVd > lVe ) $ + u0 (xVd > xVe > lVd > lVe ) =
(12)
where
u1 (xVd > xVe > lVd > lVe ) , 2t22 d0 t2 t1 d1 + t2 ṫ1
2t2 t0 d2 + t12 d2 t1 ṫ2 (13)
and
u0 (xVd > xVe > lVd > lVe ) , t2 t1 d0 + t2 ṫ0 2t2 t0 d1
+ t0 t1 d2 t0 ṫ2 =
(14)
If $ is equal to the speed of the motor, then both j($) = 0
and t($) = 0, and one obtains
u($) , u1 (xVd > xVe > lVd > lVe ) $+u0 (xVd > xVe > lVd > lVe ) = 0=
(15)
This is now a first-order polynomial equation in $ with a
unique solution as long as u1 (the coefficient of $) is nonzero
(It is shown in Appendix VII-D that u1 6= 0 in steady state if
t2 6= 0). The coefficients of u1 > u0 contain 3ug derivatives of
the stator currents and 2qg derivatives of the stator voltages
and, therefore, noise is a concern. Rather than use this purely
algebraic estimator, it is now shown how to combine it with
the dynamic model to obtain a smoother (yet stable) speed
estimator.
2 Given the polynomials j($)> t($) in $ with deg{j($)}
=
qj > deg{t($)} = qt , the Euclidean division algorithm ensures that there
are polynomials ($)> u($) such that j($) = ($)t($) + u($) and
deg{u($)} $ deg{t($)} 3 1 = qt 3 1= Consequently, if $ 0 is a zero of
both j($) and t($), then it must also be a zero of u($).
3439
IV. S TABLE DYNAMIC S PEED O BSERVER
Dividing the right side of the differential equation model
(7) by t($) (t2 (xVd > xVe > lVd > lVe ) 6= 0) > one obtains
where
d2 $ 2 + d1 $ + d0 = × t($> w) + $ + (16)
, d1 d2 t1 @t2
(17)
, d0 d2 t0 @t2 =
(18)
and
V. S IMULATION R ESULTS
As a first look at the viability of the observer (22),
simulations were carried out to test it. Here, a three-phase
(two-phase equivalent) induction motor model was simulated
using S IMULINK with parameter values chosen to be
qs = 2> UV = 5=12 ohms> UU = 2=23 ohms,
OV = OU = 0=2919 H> P = 0=2768 H,
M = 0=0021 k-gm2 > O_udwhg = 2=0337 N-m>
Lmax = 2=77 A> Ymax = 230 V=
Then, as t($> w) 0, equation (7) may be rewritten as
Uw
(w> w0 ) , h
w0
( )g
the fundamental solution of (19), the full solution is given
by
Z w
$(w) = (w> w0 )$(0) +
(w> )( )g =
w0
Consequently, a sufficient condition for stability is that
(w) ? 0 for some A 0= It is shown in Appendix
VII-C that A 0 in steady state> so the system is never
stable in steady state.
For the case that t2 (xVd > xVe > lVd > lVe ) 6= 0> consider (19)
to be the induction motor “model” and the solution $ of
algebraic estimator (15) to be the “measurement”. Then, let
an observer be defined by
g$̂
= (w)$̂ + (w) + c ($ $̂) =
(20)
gw
If c (w) A A 0 for all w, then the estimator (20) is
stable with a rate of decay of the error no less than . As
this estimator is the result of integrating the signals (w)>
(w)> and $ (from (15)), it is a smoother estimate than the
purely algebraic estimate.
In the case where t2 (xVd > xVe > lVd > lVe ) = 0> then
the right side of equation (7) can be divided by
t1 (xVd > xVe > lVd > lVe ) $ + t0 (xVd > xVe > lVd > lVe ) = 0 to
obtain:
g$̂
= f(w) + c ($ $̂) =
(21)
gw
If c A A 0 for all w, then the equation (21) is stable
with a rate of decay of the error no less than =
The estimate of speed proposed here is defined as the
solution to the observer
g$̂
, d2 (xVd > xVe > lVd > lVe ) $̂ 2 + d1 (xVd > xVe > lVd > lVe ) $̂
gw
(22)
+ d0 (xVd > xVe > lVd > lVe ) + c ($ $̂)
where
$,
½
t0 @t1
u0 @u1
if |t2 $̂| 0=05 |t1 | [See (8)]
if |t2 $̂| A 0=05 |t1 | [See (15)].
In Appendix VII-A it is shown that in steady state t1 6= 0 if
t2 = 0 while in Appendix VII-D it is shown that u1 6= 0 if
t2 6= 0=
The induction motor model for the simulation is based
on equations (1), (2), and (3). In the control scheme, the
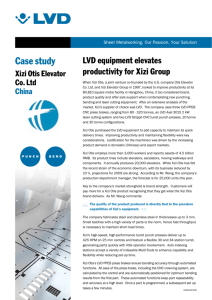
estimated speed is fed back to a current command fieldoriented controller [9]. Figure 1 shows the simulation results
of the motor speed and speed estimator with the motor under
full load. From w = 0 to w = 0=4 seconds, a constant xVd is
applied to the motor to build up the flux and the motor is
considered to be held with a brake so that $ 0= At w = 0=4
seconds, the brake is released and the machine is running on
a low speed trajectory ($ max = 5 udg@v) with full load at
the start. The estimated speed $̂ is used in the field-oriented
controller. In this simulation, the observer gain c in equation
(20) was chosen to be 1000=Figure 2 shows the simulation
6
4
2
Speed in rad/s
g$
= (w)$ + (w)
(19)
gw
which is a linear first-order time-varying system. With
0
ω̂
ω
-2
-4
-6
-8
0
2
4
Time in seconds
6
8
Fig. 1.
$ and $̂ with the motor tracking a low speed trajectory
($max = 5 udg@v) with full load at the start.
results of the motor speed and speed estimator with the motor
under full load. From w = 0 to w = 0=4 seconds, a constant
xVd is applied to the motor to build up the flux and the
motor is considered to be held with a brake so that $ 0=
At w = 0=4 seconds, the brake is released and the machine is
controlled to a zero speed trajectory ($ 0) with full load
at the start. $̂ is used in the field-oriented controller. The
observer gain c in equation (20) was again chosen to be
1000=
3440
ω̂
The explicit expression for t2 is
3
à ¡
¢ !2
g l2Vd + l2Ve
1
2
2
t2 , qs × C OV WU
4
gw
¡2
¢
g lVd + l2Ve
WU2
(xVd lVd + xVe lVe )
gw
2 ¡
¢¡
¢
W
+ U l2Vd + l2Ve x2Vd + x2Ve
OV
¡2
¢
¶
µ
2 2
1
P
2 g lVd + lVe
+ 2
+ OV WU
WU
4
gw
µ
¶2
glVd
glVe
+ OV WU2 lVe
lVd
gw
gw
µ
¶
glVd
glVe
+ 2WU2 lVe
lVd
(xVe lVd xVd lVe )
gw
gw
µ
¶
¡
¢2
P
+ OV WU2 l2Vd + l2Ve
W
µ U
¶
¶
¡2
¢
P
2
2
+
2 WU lVd + lVe (xVd lVd + xVe lVe ) =
WU
0
ω
Speed in rad/s
-1
-2
-3
-4
-5
-6
0
1
2
3
Time in seconds
4
Fig. 2. $ and $̂ with the motor tracking a zero speed trajectory ($ 0)
with full load at the start.
In steady state, let (see [9])
VI. C ONCLUSIONS AND F UTURE W ORK
This paper introduced a new approach to speed sensorless control of an induction motor which entails using an
algebraic estimate of the speed to stabilize a dynamic speed
observer. The new observer does not require any sort of
“slowly varying” speed assumption. The singularities of the
observers were characterized under steady-state conditions.
This sensorless speed controller shows potential for speed
estimation at low speeds under full load. Future work will
include the effect of parameter variation on the speed estimation as well as experimental results.
xVd + mxVe = X V hm$V w
lVd + mlVe = L V hm$V w =
The complex phasors UV and IV are related by
¯
¯
XV
¸=
LV =
1+m VV
UV + m$ V OV 1+m Vs
Vs
Here Vs ,
LV =
VII. A PPENDIX : S TEADY-S TATE E XPRESSIONS
In the following, $ V denotes the stator frequency
and V denotes the normalized slip defined by V ,
($ V qs $) @$ V = With xVd + mxVe = X V hm$V w and lVd +
mlVe = L V hm$V w , it is shown in [9] under steady-state
conditions that the complex phasors X V and L V are related
by (Vs , UU @ ($ V OU ) = 1@ ($ V WU ))
LV
XV
Ã
=
UV + m$ V OV
=
³
UV +
1 + m VVs
V
1 + m V
s
!
XV
=
´
2
$ V OV (1+V 2 $2V WU
)
+m
1+V 2 $ 2 W 2
(1)V$2V OV WU
2
1+V 2 $ 2V WU
V
U
A. Steady-state expressions for t2 > t1 > and t0
The steady-state expressions for t2 > t1 > and t0 are now
derived. These expressions are then used to show that t2 A 0
for $ 6= 0> t2 0 for $ = 0> and t1 6= 0 if t2 0=
UU
$ V OU
=
1
$V WU
XV
h
UV + m$ V OV
=³
UV +
so that
1+mV$ V WU
1+mV$ V WU
i
XV
´
2
$ V OV (1+V 2 $2V WU
)
+m
1+V 2 $ 2 W 2
(1)V$ 2V OV WU
2
1+V 2 $ 2V WU
Further,
xVd lVd + xVe lVe
xVe lVd xVd lVe
l2Vd + l2Ve
x2Vd + x2Ve
=
=
=
=
V
U
Re (X V L V )
Im (X V L V )
|L V |2
|X V |2 =
Thus, the 1vw > 2qg > and 4wk terms of t2 are all zero, i.e.,
à ¡
¢ !2
g l2Vd + l2Ve
21
2
=0
qs OV WU
4
gw
¢
¡2
2
2 2 g lVd + lVe
qs WU
(xVd lVd + xVe lVe ) = 0
gw
¢2
¡
q2s (P@WU + 2) (1@4) OV WU2 g l2Vd + l2Ve @gw = 0=
3441
The 3ug term of t2 is given by
W2
q2s U
OV
¡2
¢¡
¢
lVd + l2Ve x2Vd + x2Ve =
W2
q2s U
OV
The 5wk term of t2 is given by
µ
¶2
glVd
glVe
2
2
qs OV WU lVe
lVd
gw
gw
2
=
The 6
If $ = 0> then V = 1 and t1 6= 0=
Finally, the steady-state expression for t0 is
|L V |2 |X V |2 =
t0 = µ³
UV +
2
OV WU2 $ 2V |L V | |X V |
´2 $2 O2 1+V 2 $2 W 2 2 =
(
)
(1)V$ 2 O W
UV + 1+V 2 $V2 WV2 U + V V 2 2 2V 2U
V U
(1+V $V WU )
×
q2s ³
The purpose of this appendix is to show that in steady
state, |t2 $| ¿ |t1 | if (WU qs $)2 ¿ 1= In steady state,
2
|t2 $| = µ³
UV +
×
The 7 term of t2 is
¶
µ
¡
¢2
P
2
qs + OV WU2 l2Vd + l2Ve
WU
³ 2
´
Uv
(1)Uv
+
WU2 |L V |2 |X V |2
O
W
v
U
2
= qs ³
´2 $2 O2 1+V 2 $2 W 2 2 =
(
)
(1)V$ 2 O W
UV + 1+V 2 $V2 WV2 U + V V 2 2 2V 2U
V U
(1+V $V WU )
2
$ 2 OV (1 ) (1 V)
× V
=
(1 + V 2 $ 2V WU2 )
(WU qs $)2
(1 + V 2 $ 2V WU2 )
qs |$ V | OV (1 )2 |X V |4
|t1 | = µ³
´2 $2 O2 1+V 2 $2 W 2 2 ¶2
(
)
(1)V$ 2 O W
UV + 1+V 2 $V2 WV2 U + V V 2 2 2V 2U
V U
(1+V $V WU )
¯³
´¯
¯
2 ¯
¯ 1 (WU qs $) ¯
×
=
(1 + V 2 $ 2V WU2 )
Their ratio is then
¯
¯
|t2 $| ¯¯ (WU qs $)2 ¯¯
=¯
¯
¯ 1 (WU qs $)2 ¯
|t1 |
2
which shows that (WU qs $) ¿ 1 =, |t2 $| ¿ |t1 | =
Finally, substituting these steady-state expressions into the
expression for t2 > one obtains
(1)V$ 2V OV WU
2
1+V 2 $ 2V WU
4
|X V |
´2 $2 O2 1+V 2 $2 W 2 2 ¶2
(
)
+ V V 2 2 2V 2U
(1+V $V WU )
C. Steady-state expressions for d2 > d1 > d0 > and The steady-state expressions for d2 > d1 > and d0 are now
given and used to show that the steady-state value for is
always positive. The steady-state expressions for d2 > d1 > d0
are
4
(23)
With $ 6= 0> it is seen that t2 A 0 and t2 = 0 if and only if
V = 1 (which is equivalent to $ = 0) =
Similarly, it can be shown that the steady-state expression
for t1 is
q2s |X V |
d2 = µ³
´2 $2 O2 1+V2 $2 W 2 2 ¶2
(
)
(1)V$ 2V OV WU
+ V V 2 2 2V 2U
UV + 1+V 2 $2 W 2
V U
(1+V $V WU )
2
×
$ V (1 )
1
×
2 (1 + V 2 $ 2V WU2 ) ghq
4
qs $ V |X V |
´2 $2 O2 1+V 2 $2 W 2 2 ¶2
2
(
)
(1)V$ V OV WU
+ V V 2 2 2V 2U
2
1+V 2 $ 2V WU
(1+V $V WU )
³
´
OV (1 )2 1 $ 2V WU2 (1 V)2
×
=
(24)
(1 + V 2 $ 2V WU2 )
t1 = µ³
UV +
4
qs |$ V | OV (1 ) |X V |
´2 $2 O2 1+V2 $2 W 2 2 ¶2
(
)
(1)V$ 2V OV WU
+ V V 2 2 2V 2U
2
1+V 2 $ 2V WU
(1+V $V WU )
and
The 8wk term of t2 is
¶
µ
¡
¢
P
2
qs
2 WU2 l2Vd + l2Ve (xVd lVd + xVe lVe )
WU
³
´
2
2
2Uv
1
2
O
+
WU WU |L V | |X V |
v
2
=qs ³
´2 $2 O2 1+V 2 $2 W 2 2
(
)
(1)V$ 2 O W
UV + 1+V 2 $V2 WV2 U + V V 2 2 2V 2U
V U
(1+V $V WU )
µ
¶
(1 ) V$ 2V OV WU
× UV +
=
1 + V 2 $ 2V WU2
t2 = µ³
UV +
(25)
2
wk
q2s WU2
2
$ 2V OV (1 ) (1 V)
=
(1 + V 2 $ 2V WU2 )
B. (WU qs $) ¿ 1 =, |t2 $| ¿ |t1 |
term of t2 is
µ
¶
glVd
glVe
2
2
qs 2WU lVe
lVd
(xVe lVd xVd lVe )
gw
gw
2
$ V OV (1+V 2 $ 2V WU
)
2WU2 $ V |L V |2 |X V |2
2 $2 W 2
1+V
2
V U
= qs ³
´2 $2 O2 1+V 2 $2 W 2 2 =
(
)
(1)V$ 2 O W
UV + 1+V 2 $V2 WV2 U + V V 2 2 2V 2U
V U
(1+V $V WU )
wk
|X V |4
´2 $2 O2 1+V 2 $2 W 2 2 ¶2
(
)
(1)V$ 2V OV WU
+ V V 2 2 2V 2U
2
1+V 2 $ 2V WU
(1+V $V WU )
(26)
4
d1 = µ³
UV +
3442
×
qs |X V |
´2 $2 O2 1+V 2 $2 W 2 2 ¶2
(
)
(1)V$ 2V OV WU
+ V V 2 2 2V 2U
2
1+V 2 $ 2V WU
(1+V $V WU )
2$ 2V (1 )2 (1 V)
1
×
2
2
2
2
(1 + V $ V WU )
ghq
(27)
and
4
d0 = µ³
UV +
×
|X V |
´2
(1)V$ 2V OV WU
+
2
2
2
1+V $ W
V
2
$ 2V O2V (1+V 2 $ 2V WU
)
U
2
(1+V 2 $2V WU2 )
$ 3V (1 )2 (1 V)2
1
×
=
2
2
2
2
(1 + V $ V WU )
ghq
2
¶2
(28)
where
4
³
2
(1) 1+(V1)V$ 2V WU
2
WU
1+V 2 $ 2V WU
´2
qs WU |X V |
ghq , µ³
´2 $2 O2 1+V 2 $2 W 2 2 ¶2
(
)
(1)V$ 2V OV WU
+ V V 2 2 2V 2U
UV + 1+V 2 $2 W 2
V U
(1+V $V WU )
µ
¶2
2
$ V OV (1+V 2 $ 2V WU
)
4
$V
qs WU |X V |
2
1+V 2 $ 2V WU
+ µ³
´2 $2 O2 1+V 2 $2 W 2 2 ¶2 =
(
)
(1)V$2V OV WU
+ V V 2 2 2V 2U
UV + 1+V 2 $2 W 2
V U
(1+V $V WU )
Remark Recall that it was pointed out in Section
¯ ¯ III
¯ ¯
(following equation (6)) that ghq = 0 if and only if ¯# U ¯ 0=
To compute the steady-state value of > note that by (17),
= d1 d2 t1 @t2 =
It is then easily seen that d1 A 0> d2 t1 ? 0> and t2 A 0> so
that in the steady state A 0= That is, the system (19) is
never stable in steady state.
D. Steady-state expression for u1
It is now shown that the steady-state value of
u1 (xVd > xVe > lVd > lVe ) in (13) is nonzero.
Substituting the steady-state values of t2 > t1 > t0 > d2 > d1 >
and d0 (noting that ṫ1 0 and ṫ2 0 in steady state) into
(13) gives
|X V |12
´2 $2 O2 1+V 2 $2 W 2 2 ¶6
(
)
(1)V$ 2V OV WU
+ V V 2 2 2V 2U
2
1+V 2 $ 2V WU
(1+V $V WU )
µ
¶3
q4s (1 )6 $ 3V O2V
1
×
×
1 + V 2 $ 2V WU2
4
³
´2
1
2
× 1 + WU2 $ 2V (1 V)
×
ghq
where ghq is given in Appendix VII-C. It is then seen that
u1 6= 0 in steady state.
u1 = µ³
UV +
E. Steady-state speed
Substituting in the steady-state values of d2 > d1 > and d0 ,
it is seen that
d21 4d2 d0 0>
so that, interestingly, the steady-state value of the right-hand
side of (7) may be rewritten as
µ
¶2
d1
2
d2 $ + d1 $ + d0 = d2 $ +
2d2
where d2 is nonzero by (26) =
On the other hand, the steady-state solutions of (8) are
p
t1 + t12 4t2 t0
=$
$1 ,
2t2
and
p
t1 t12 4t2 t0
1
= 2 2 =
$2 ,
2t2
WU qs $
Interestingly the correct steady-state speed is found by
choosing the + sign in the quadratic formula when computing the roots of (8). However, this is not necessarily true
if the system is not in steady state.
R EFERENCES
[1] K. Rajashekara, A. Kawamura, and K. Matsuse, eds., Sensorless Control of AC Motor Drives - Speed and Position Sensorless Operation.
IEEE Press, 1996.
[2] P. Vas, Sensorless Vector Control and Direct Torque Control. Oxford
University Press, 1998.
[3] M. Vélez-Reyes, K. Minami, and G. Verghese, “Recursive speed and
parameter estimation for induction machines,” in Proceedings of the
IEEE Industry Applications Conference, pp. 607–611, 1989. San
Diego, California.
[4] M. Vélez-Reyes, W. L. Fung, and J. E. Ramos-Torres, “Developing
robust algorithms for speed and parameter estimation in induction
machines,” in Proceedings of the IEEE Conference on Decision and
Control, pp. 2223–2228, 2001. Orlando, Florida.
[5] M. Vélez-Reyes, Decomposed algorithms for parameter estimation.
PhD thesis, Massachusetts Institute of Technology, 1992.
[6] M. Vélez-Reyes and G. Verghese, “Decomposed algorithms for speed
and parameter estimation in induction machines,” in Proceedings of
the IFAC Nonlinear Control Systems Design Symposium, pp. 156–161,
1992. Bordeaux, France.
[7] M. Bodson and J. Chiasson, “A comparison of sensorless speed
estimation methods for induction motor control,” in Proceedings of
the 2002 American Control Conference, pp. 3076–3081, May 2002.
Anchorage, AK.
[8] E. G. Strangas, H. K. Khalil, B. A. Oliwi, L. Laubnger, and J. M.
Miller, “A robust torque controller for induction motors without rotor
position sensor: Analysis and experimental results,” IEEE Transactions
on Energy Conversion, vol. 14, pp. 1448–1458, December 1999.
[9] W. Leonhard, Control of Electrical Drives. 3rd Edition, SpringerVerlag, Berlin, 2001.
[10] M. Ghanes, J. Deleon, and A. Glumineau, “Validation of an interconnected high gain observer for sensorless induction motor on low
frequencies benchmark: Application to an experimental set-up,” IEE
Proceedings Control Theory and Applications, vol. 152, pp. 371–378,
July 2005.
[11] D. Nešić, I. M. Y. Mareels, S. T. Glad, and M. Jirstrand,
“Software for control system analysis and design: symbol manipulation,” in Encyclopedia of Electrical Engineering, John Wiley & Sons, J. Webster, Editor, 2001.
available online at
http://www.interscience.wiley.com:83/eeee/.
[12] M. Diop and M. Fliess, “On nonlinear observability,” in Proceedings
of the 1st European Control Conference, pp. 152–157, Hermès, Paris,
1991.
[13] M. Diop and M. Fliess, “Nonlinear observability, identifiability and
persistent trajectories,” in Proceedings of the 36th Conference on
Decision and Control, pp. 714–719, Brighton England, 1991.
[14] M. Fliess and H. Síra-Ramirez, “Control via state estimation of
some nonlinear systems,” in Symposium on Nonlinear Control Systems
(NOLCOS-2004), September 2004. Stuttgart, Germany.
[15] S. Ibarra-Rojas, J. Moreno, and G. Espinosa-Pérez, “Global observability analysis of sensorless induction motors,” Automatica, vol. 40,
pp. 1079–1085, 2004.
[16] M. Bodson, J. Chiasson, and R. Novotnak, “High performance induction motor control via input-output linearization,” IEEE Control
Systems Magazine, vol. 14, pp. 25–33, August 1994.
[17] R. Marino, S. Peresada, and P. Valigi, “Adaptive input-output linearizing control of induction motors,” IEEE Transactions on Automatic
Control, vol. 38, pp. 208–221, February 1993.
3443