ECE 692 Advanced Topics on Power System Stability 2 – Power System Modeling
advertisement

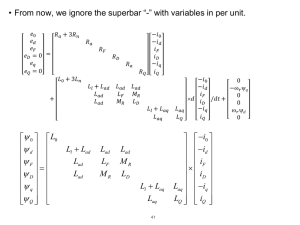
ECE 692 Advanced Topics on Power System Stability 2 – Power System Modeling Spring 2016 Instructor: Kai Sun 1 Outline •Modeling of synchronous generators for Stability Studies •Modeling of loads •Modeling of frequency and voltage regulation systems •Materials – Kundur’s Chapters 3‐5 and 7‐9 – Chapter 12 of “Power System Analysis”(3rd Ed.) by Saadat 2 2.1 Modeling of Synchronous Generators for Stability Studies 3 Synchronous Generators Cylindrical/round rotor Salient-pole rotor Field winding Armature winding Stator 16 poles salient-pole rotor (12 MW) Round rotor generator under construction 4 (Source: http://emadrlc.blogspot.com) Stator and Rotor Windings • Consider a reference frame rotating synchronously with d and q-axes at speed r (assumed to be along with the axis of a-a’ at t=0) • is the displacement of d-axis from the axis of a-a’ • is the displacement of q-axis from the rotating reference axis Reference axis Armature windings: • a‐a’, b‐b’ and c‐c’ windings Rotor windings: • Field windings – Field winding F‐F’ produces a flux on the d‐axis. • Damper windings – Two damper windings D‐D’ and Q‐Q’ respectively on d‐ and q‐axes – For a round‐rotor machine, consider a second damper winding G‐G’ on the q‐ axis (two windings on each axis) Total number of windings: • Salient pole: 3+3 • Round‐rotor: 3+4 r Direct or d axis r t 2 Quadrature or q axis ANSI/IEEE standard 100-1977 defines the q-axis to lead the d-axis by 900 5 Voltage and Flux Equations (Salient‐pole machine) • Model windings as a group of magnetically coupled circuits with inductances depending on RF ea Ra e b 0 ec 0 e F 0 e 0 0 D eQ 0 0 0 Rb 0 0 0 0 0 Rc 0 0 0 0 0 RF 0 0 0 0 0 RD 0 0 0 0 ψ abc L SS ψ FDQ L RS ia i b ic d iF dt i D iQ a b c F D Q eF lab lb b lac lb c laF lb F laD lb D l cb l cc l cF l cD lFb lDb lFc lDc lFF lDF lFD lDD lQ b lQ c lQ F lQ D L SR i abc L RR i FDQ l a Q ia l b Q ib l cQ ic l F Q iF l D Q iD l Q Q iQ Rc F RD eD=0 c b D eQ=0 ec a Ra Q 0 i abc d ψ abc R FDQ i FDQ dt ψ FDQ e abc R abc e 0 FDQ a l a a b lb a c l ca F l F a l D Da Q l Q a RQ 0 0 0 0 0 ea Rb eb RQ • Stator self‐inductances (laa, lbb, lcc) • Stator mutual inductances (lab, lbc, lac) • Stator‐to‐rotor mutual inductances (laF, lbD, laQ) • Rotor self‐inductances (lFF, lDD, lQQ) • Rotor mutual inductances (lFD, lDQ, lFQ) A main objective of synchronous machine modeling is to find constants for simplification of voltage and flux equations 6 Self‐ and Mutual Inductances Each of windings 1 & 2 is stationary (on the stator) or rotating (on the rotor) N1 N2 l12 =N1N2 P12 = l21 (Symmetric) a l a a l a b bb b l b a LlSS c l ca l cb F l F a Ll F b RS l lDb Da D Q l Q a l Q b lac lb c laF lb F laD lb D l cc l cF l cD lFc lDc lFF lDF lFD LRR lDD lQ c lQ F lQ D LSR l a Q ia l b Q ib l cQ ic l F Q iF l D Q iD l Q Q iQ P12 - permeance of the mutual flux path (mainly influenced by the air gap) • Stator self/muual inductances (e.g. laa and lab): P12 between stator windings is a function of and reaches its maximum twice per cycle P12 P0+P2cos2(+) l12 =l0+l2cos2(+) • Stator to Rotor Mutual Inductances (e.g. laF): P12 between stator and rotor windings is almost constant but N1N2 is a function of and reaches its maximum once per cycle; flux leakage can be ignored (l0=0) N1N2 N0cos(+) • l12 =l1cos(+) Rotor Inductances are all constant F R 0 R D 0 0 0 Q Using a reference revolving with the rotor will lead to a constant inductance matrix 7 Park’s Transformation i 0dq Pi abc ψabc LSS LSR ψ FDQ LRS LRR e abc R abc e 0 FDQ e0 R a e d 0 eF 0 0 0 e 0 q 0 0 P 1/ 2 2 / 3 cos sin i abc i ψ 0 dq Pψ abc FDQ 0 i abc d ψ abc R FDQ i FDQ dt ψ FDQ 0 Ra 0 0 0 0 0 0 0 RF 0 0 0 0 RD 0 0 0 0 Ra 0 0 0 0 0 i0 0 id 0 iF 0 iD 0 iq RQ iQ 1/ 2 cos( 2 / 3) sin( 2 / 3) 1/ 2 cos( 2 / 3) sin( 2 / 3) 0 L0 0 0 0 0 0 i0 i 0 0 0 L kM kM d d F D d F 0 kMF LF MR 0 0 iF 0 0 iD D 0 kMD MR LD 0 0 Lq kMQ iq 0 0 q 0 0 kMQ LQ iQ Q 0 0 L0 Ls 2M s 3 Ld Ls M s Lm 2 3 Lq Ls M s Lm 2 k 3/ 2 e0 dq Pe abc L0 0 0 0 0 0 0 Ld 0 kM F 0 kM D 0 0 kM F LF MR 0 kM D MR LD 0 0 0 0 Lq 0 0 0 kM Q i0 0 i 0 d 0 d iF 0 dt i D i kM Q q LQ iQ 0 r q 0 0 r d 0 8 Per Unit Representation • Using the machine ratings as the base values es base (V) peak value of rated line-to-neutral voltage is base (A) peak value of rated line current fbase (Hz) rated frequency S3 base (VA) = es base×is base Zs base ( ) =es base/is base Ls base (H) =Zs base/base base (elec. rad/s) =2fbase tbase(s) s base (Wbturns) =Ls base×is base= es base/base Tbase (Nm) = p.u. 2 2 If f=fbase =1/ base =1/(2fbase) s base×is base • Lad-Laq based per unit system: assume all per unit mutual inductances between in q-axis the stator and rotor circuits are all equal to in d-axis or F D Q 0 0 0 0 0 i0 Base d q 0 0 L0 1 fbase 0 0 0 L L L L l ad ad ad id d S3 base 2 es base q 0 0 0 Laq iq Ll Laq 0 iF base iD base iQ base is base 3 0 0 0 L L M ad F R iF F D 0 0 Lad MR LD 0 iD iFbase, iDbase and iQbase enable a symmetric 0 0 0 0 L L iQ per-unit inductance matrix Q aq Q 9 Equivalent Circuits e0 Ra e d 0 eF 0 0 0 e 0 q 0 0 0 L0 0 d F 0 p D 0 q 0 Q 0 0 Ra 0 0 0 RF 0 0 0 0 0 0 0 0 0 0 0 0 RD 0 0 0 Ra 0 0 0 RQ 0 0 0 i0 L0 i d 0 iF 0 iD 0 i 0 q iQ 0 0 0 0 0 Ll Lad Lad Lad 0 Lad LF MR 0 Lad 0 MR 0 LD 0 0 Ll Laq 0 0 0 Laq 0 Ll Lad Lad 0 Lad LF 0 Lad MR 0 0 0 Lad 0 0 MR 0 0 LD 0 0 0 Ll Laq Laq 0 i0 0 id 0 iF p 0 iD Laq iq LQ iQ i0 0 i d r q iF 0 p 0 iD 0 Laq iq r d LQ iQ 0 0 0 0 They follow Faraday’s law (differential operator p=d/dt) iD+iF ed 10 Equivalent Circuits with Multiple Damper Windings Usually ignored MR-Lad 0 L1d =LD - MR Lfd=LF -MR Rfd=RF R1d =RD efd=eF L1q=LQ – Laq L2q=LG – Laq R1q=RQ R2q=RG EPRI Report EL-1424-V2, “Determination of Synchronous Machine Stability Study Constants, Volume 2”, 1980 11 Lad=KsdLadu Ksd = at/at0 = at/(at+ I) = I0 / I 12 Steady‐state Analysis All derivatives are zero: pr=0 r=1 and L=X in p.u. pfd=0 efd= Rfdifd p1d=0 i1d=0 d= -Ldid+Ladifd p1q=0 i1q=0 q= -Lqiq pd=0 ed =rLqiq -Raid = Xqiq -Raid pq=0 eq = -rLdid +rLadifd -Raiq = -Xdid +Xadifd -Raiq Terminal voltage & current phasors: =ed+jeq = =id+jiq – (Ra+ jXq where =j[Xadifd-(Xd-Xq)id] If saliency is neglected Xd=Xq=Xs (synchronous reactance) Eq=Xadifd 13 Computing per‐unit steady‐state values r 1p.u. • Active and Reactive Powers S Et It* (ed j eq )(id j iq ) (ed id eqiq ) j(eqid ed iq ) ed r q Raid eq r d Raiq Pt ed id eqiq rTe Ra (id2 iq2 ) Qt eqid ed iq • Air-gap torque (or electric torque) Te d iq q id =Pt Ra (id2 iq2 ) 14 Sub‐transient and Transient Analysis • Following a disturbance, currents are induced in rotor circuits. Some of these induced rotor currents decay more rapidly than others. – Sub‐transient parameters: influencing rapidly decaying (cycles) components – Transient parameters: influencing the slowly decaying (seconds) components – Synchronous parameters: influencing sustained (steady state) components 15 Short‐circuit and open circuit time constants Consider the d-axis network • Short-circuit time constant – Instantaneous change on d – Delayed change on id ( through ) • Open-circuit time constant 0 – Instantaneous change on id – Delayed change on d ( through Ld ( s) d id Ld e fd 0 1 s 1 s 0 ) (1 sTd )(1 sTd) Ld ( s ) Ld (1 sTd0 )(1 sTd0 ) • Time constant or 0 equals the division of the total inductance and resistance (L/R) with the effective circuit 16 Transient and sub‐transient parameters + pfd - + p1d - R1d>>Rfd + p1q - L1q /R1q>>L2q /R2q Lfd /Rfd>>L1d /R1d d axis circuit Considered rotor windings Time constant (open circuit) Only field Winding T’d0= + 8.07(s) Time constant (short circuit) Inductance (Reactance) Ld(s) and Lq(s) T’d= q axis circuit Add the damper winding T’’d0= // L’d= Ll+Lad//Lfd 0.30(pu) T’’d= // // 0.23(pu) T’q= L’q= Add the 2nd damper winding T’’q0= // 0.07(s) 1.00(s) L’’d= Ll+Lad//Lfd//L1d Based on the parameters of Kundur’s Example 3.2 + T’q0= 0.03(s) // Only 1st damper winding // Ll+Laq//L1q 0.65(pu) T’’q= // // L’’q= Ll+Laq//L1q//L2q 0.25(pu) • Note: time constants are all in p.u. To be converted to seconds, they have to be multiplied by tbase=1/base (i.e. 1/377 for 60Hz). 17 18 Synchronous, Transient and Sub‐ transient Inductances (1 sTd )(1 sTd) Ld ( s ) Ld (1 sTd0 )(1 sTd0 ) • Under steady‐state condition: s=0 (t) Ld(0)=Ld (d-axis synchronous inductance) • During a rapid transient: s Lad L fd L1d TdTd Ld Ld () Ld Ll Td0Td0 Lad L fd Lad L1d L fd L1d (d-axis sub-transient inductance) • Without the damper winding :s>>1/T’d and 1/T’d0 but << 1/T”d and 1/T”d0 Lad L fd Td Ld Ld () Ld Ll Td0 Lad L fd (d-axis transient inductance) 19 Xd ≥ Xq ≥ X’q ≥ X’d ≥ X”q ≥ X”d >Xl T’d0 > T’d > >T”d0 > T”d T’q0 > T’q > >T”q0 > T”q 20 Swing equations 2 H d 2 Tm Te - K D r 2 0 dt 2H (s) d (r ) Tm Te - K D r dt 1 d = r 0 dt Some references define M=2H, called the mechanical starting time, i.e. the time required for rated torque to accelerate the rotor from standstill to rated speed 21 State‐Space Representation of a Synchronous Machine So far, we modeled all critical dynamics about a synchronous machine: • State variables (pX): – stator and rotor voltages, currents or flux linkages – swing equations (rotor angle and speed) • Time constants: – Inertia: 2H – Sub‐transient and transient time constants, e.g. T’d0 and T”d0 • Other parameters – Stator and rotor self‐ or mutual‐inductances and resistances – Rotor mechanical torque Tm and stator electromagnetic torque Te 22 State Space Model on a Salient‐pole Machine • Consider 5 windings: d, q, F (fd), D (1d) and Q (1q) d – Voltage and flux equations: e R i L i ΩΨ e0 e d e fd e , 0 e q 0 i0 i d i fd i , Ψ i1d i q i1q 0 d fd , 1d q 1q dt 0 r q 0 ω ΩΨ 0 r d 0 – Swing equations: • Define state vector x=[d fd 1d q 1q r ]T Thus, the state‐space model: Ψ Li d Ψ (R L1 Ω) Ψ e dt 2H d r Tm Te Tm ( d iq q id ) dt d r 0 r 1 dt x f (x, e fd , Tm , ed , eq ) • efd and Tm are usually known but ed and eq are related to its loading conditions (the grid), so algebraic power‐flow equations should be introduced. • The grid model is a set of Differential‐Algebraic Equations (DAEs) 23 Neglect of Stator p terms 24 Simplified Models pΨ (R L1 Ω) Ψ e • [d fd 1d q 1q r ]T or [d fd 1d q 1q 2q r ]T 2 H pr Tm Te p r 1 Let pd=pq=0 and r=1 pu =q= -Lqiq • [fd 1d 1q r ]T or [fd 1d 1q 2q r ]T – Inertia 2H ~ pr – Transient T’d0 ~ pfd – Sub-transient T”d0 ~p1d T’q0 ~ p1q T”q0 ~ p2q Let p1d =p1q=0 (neglect damper windings) [fd r =d= -Ldiq ]T – Inertia – Transient 2H ~ pr T’d0~ pfd Constant flux linkages • [r ]T (classic model) – Inertia 2H ~ pr 25 E’q= fd Lad/(Lad+Lfd) Efd =efd Lad/Rfd T’d0 ~pE’q(fd ) T”d0 ~p’d (1d ) T”q0 ~ p”q (1q) Source: J. Weber, “Description of Machine Models GENROU, GENSAL, GENTPF and GENTPJ,” PowerWorld, Oct 2015 26 27 Phasor diagram =jXadifd 28 Classic Model •Eliminate the differential equations on flux linkages (swing equations are the only differential equations left) •Assume X’d=X’q 2 H pr Tm Te p r 1 Et E ( Ra jX d ) It E’ is constant and can be estimated by computing its pre-disturbance value E Et 0 ( Ra jX d ) It 0 29 Comparison of PSS/E Generator Models 30