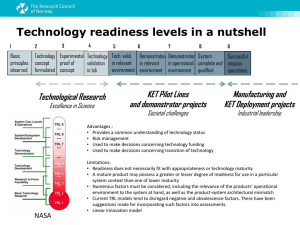
NASA-Unique Automated Rendezvous & Capture (AR&C) Element JSC - DM / Don Pearson
advertisement
 Element JSC - DM / Don Pearson")
NASA-Unique Automated Rendezvous & Capture (AR&C) Element JSC - DM / Don Pearson 2nd Generation RLV Program Goals Safety - Improve Safety to 1 to 10,000 Loss of Crew Cost - Reduce NASA’s Mission Price to $1,000/lb Objectives • Converged Set of Government and Commercial Requirements • Integrated with Rigorous Systems Engineering Processes • Architecture Definitions and Designs • Risk Reduction Activities • Knowledge Base for Informed Decisions • Competition 2 5854 2GRLV • Implementing the Space Launch Initiative near term activities • Decision to proceed with Full Scale Engineering Development is now planned for the end of Fiscal Year 2006 • Includes NASA-led and Industryled activities 3 Technology Areas • • • • • • • • • • TA-1 Architectures – Boeing, Lockheed, Orbital Sciences TA-2 Airframe – Airframe, tanks, TPS TA-3 Vehicle Subsystems – Avionics, Power, Actuators TA-4 Operations – Propellant densification, Advanced Checkout & Control Systems TA-5 Integrated Vehicle Health Management System (IVHM) TA-6 Upper Stages TA-7 Flight Mechanics TA-8 Propulsion TA-9 NASA – Unique (see next page) TA-10 Flight Demonstrations 4 NASA Unique Project (TA-9) • Project Organization Structure & Project Implementation Plan – TA-9 Project Manager: JSC – EA / Dave Leestma • Developing systems necessary to meet unique government mission requirements such as – TA 9.1 – Environmental Control – TA 9.2 – Crew Health – TA 9.3 – EVA – TA 9.4 – Crew Escape – TA 9.5 – Mission Planning & Operations – TA 9.6 – Communications – TA 9.7 – Robotics – TA 9.8 – Automated Rendezvous and Capture (see next page) 5 NASA Research Announcement (NRA) 8-30 Cycle II 2.1.8 Advanced Automated Rendezvous and Capture Systems, TA-9.8 Offeror should propose technologies leading to integrated systems that will facilitate and simplify the automated rendezvous and capture mission phases and operations while reducing overall system life cycle schedule and cost and increasing system/operations safety and reliability. Concepts supporting rendezvous with both cooperative targets (including ISS) and disabled targets should be proposed. Human-rating and on-board operator enhancements will also be considered. The offeror should propose technologies and tools that will allow for minimum flight to flight reconfiguration and testing as well as mission/vehicle evaluation. The offeror should address the development of integrated system level design and operations requirements to meet the SLI objectives of cost, mission success and safety. Additionally the proposals should include plans for early integrated-system ground based testing in relevant environments as well as on orbit component demonstrations, and follow-on full scale integrated flight demonstrations on existing, planned, or new vehicles. Specifically, proposals are sought to solve the following technology gaps: 6 NRA 8-30 Cycle II (cont) Rendezvous and capture relative navigation sensors: A single navigation sensor providing range and bearing information to a target at ranges up to 50km and down through docking is desired. Precision determination of relative position and attitude, along with rates is necessary for the final approach and docking. GN&C algorithms for rendezvous and capture: New algorithms of the automated rendezvous system shall provide a capability for autonomous navigation, maneuver planning, and execution. Software algorithms shall support nominal and contingency situations. Automated capture requires precision control of the vehicle’s relative position and attitude prior to and during capture operations. Lightweight docking and berthing systems: Systems shall be lightweight, robust, and support final mating with a variety of space vehicles. 7 Solutions • Everyone has a potential solution, or something adaptable. – JSC has essentially an “automate-able” system • GPS coming online, star tracker / radar / relative navigation • targeting, semi-automated flight control • TCS (laser). R-POP guidance (flies pilot through V-bar and down glideslope) • Shuttle performs attitude control automatically, but lacks relative attitude control automation – MSFC has their unique AR&C capability, for the DART mission • GPS + AVGS • targeting – DARPA has its unique Orbital Express capability • GPS + AVO suite (cameras, lidar / IR, AVGS) • targeting, nav schemes closely related to Shuttle algorithms, RPOP 8 Solutions (cont) – JPL has its proposed capabilities • CNES ’07 demonstration mission • Mars Sample Return – AFRL XSS-11 • NRA solicitiation has surfaced additional contributions that can be beneficial • Our goal: Survey the field. Select the best / most adaptable solutions to meet SLI Program and DRM requirements Build what we need 9 Risk Reduction Approach 1/1/03 High Program Risk FY02 Requirements, surveys, test bed preps NASA-led & Industry-led NRA AR&C task consolidation FY03 6/1/06 FY04 FY05 FY06 FY07 • SLI SRD input • AR&C Lessons Learned • Tool assessment • Technology assessment • Preferred algorithms • Preferred sensors Technology • Glare reduction Development • Situational awareness Prototype Development Low Program Risk • Flight testable AR&C system @ TRL-6 Launch Vehicle Integration & Flight Test 10 Technical Content • FY02 effort will focus on – Surveys of existing tools, sensors, & algorithms • InterAgency Working Group • Looking beyond JSC at potential solutions, seek collaborative efforts – Lessons learned from previous rendezvous experiences – AR&C requirements development • System Requirements Doc (SRD) • System Requirements Review (SRR) at end of year. – Test bed preparations • Consolidation of NASA-led tasks with those awarded to industry under the NRA will occur at the end of the Fiscal Year. • Coordinate with SLI architecture teams – ensure technology efforts consistent with spacecraft concepts. • Technology development (pending results of the existing technology assessments) will be started on FY-03. 11 Not optimizing for a particular mission (cont) Current DRMs focus on ISS ISS solution can be easy: HIGHLY COOPERATIVE TARGET Gemini / Apollo : transponders to 400 nmi Comm links GPS on both vehicles AVGS can be “docking sensor”, with straightforward automation of current Shuttle software. alternatively: adaptation of other cooperative nav/comm systems (NRL, Intel Auto) need to support departure, circumnavigation ISS Program prefers not to mount additional components on ISS Shuttle experience indicates that other missions “will happen” HST servicing: COOPERATIVE TARGET Solar Max, Westar/Palapa, Syncom IV-4, Intelsat UNCOOPERATIVE The need will exist to rendezvous under these conditions. Probable impacts: Longer range relative navigation, changing aspect angles( target imaging) unique capture mechanisms and use of crewed chaser vehicles Inter-Agency interest in this technology 12 Summary Our goal is to reuse as much as possible, and provide the most flexibility in our capability. If historic trends are any indication, we’ll be flying with it for 50 + years to come... 13 BACKUP DISCUSSION CHARTS 14 Technical Risk Reduction: The problems • Besides the sensors / algorithms / docking hardware selections, what have been the problems in the past that present risks to the future for rendezvous? #1: MATING! That touching thing... STS-13 (41-C) Solar Max (MMU) STS-51A Westar / Palapa (MMU) STS-51I Syncom IV (grab bar) STS-49 Intelsat (bar) Who’s demonstrating technology reduction for MATING in next 5 years? #2: Jet Failures #3: Spacecraft unmodeled accelerations (venting...) #4: Flight Software (FSW) algorithm bugs #5: Prime navigation sensors 15 AR&C Risk • 2GRLV Program risk NU021, Rank=3, RE=20 (High) states "Given performance, reliability, and cost of current domestic technology for automated rendezvous and capture systems, the possibility exists that Level 1 requirements for safety, cost, and alternate access will not be met." – Context: TA-9.8, specifically rendezvous and capture integration, relative navigation sensors, GN&C algorithms, and lightweight docking and berthing systems • Details on task level risks (pending AR&C funding approval) will be identified. The risk mitigation plans & task implementation plans will address the areas of – – – – Guidance, Navigation & Control Sensors Docking and capture Integration with SLI GN&C architecture concept 16 AR&C Organization Element Management AR&C Working Group • MSFC • NRL • JPL • AFRL • GSFC • DARPA • ARC AR&C Technical Management Team • Lockheed Martin • TA-1 team • Boeing • Orbital Sciences Tri Nguyen, Manager Don Pearson, Deputy WBS 1.0 Requirements Integration & Systems Engineering DART program (MSFC) Don Pearson, Chief Systems Engineer WBS 2.0 Orbital Express program (DARPA) Sensors Terry Hill, Lead WBS 3.0 EG Sensors Janet Bell, Lead EV Sensors Jim Lamoreux, Lead GN&C Algorithms Visualization Scott Merkle, Lead Al DuPont, Backup Lui Wang, Lead WBS 4.0 WBS 5.0 Docking & Capture Systems James Lewis, Lead WBS 6.0 17 AR&C Schedule 18 TA9.8 Recent Accomplishments • Completed AR&C Project Implementation Plan – – – – Project goals high level milestones management structure work breakdown structure • Initiated Inter-agency AR&C Working Group activities – DOD (NRL, DARPA, AFRL) – NASA (JSC, MSFC, GSFC, ARC, JPL) note: our SLI AR&C interests are just a single element of numerous Govt programs and institutional initiatives. 19 AR&C Overview AR&C System Ground control Situational Awareness Mission Planning Vehicle comm system Target Vehicle (Cooperative) Target Vehicle (Un-Cooperative) AR&C System Target Vehicle situational awareness Targets Reflectors Cameras Prox ops sensors (EG/EV) (< 1km) No AR&C Aids Docking mechanisms (ES) Rendezvous sensors (EG/EV) (200km-1km) GPS Radar Star Tracker Laser Laser Imaging Radar Advanced GN&C System (EG) AR&C System Propulsion & maneuvering systems Continuous Guidance Advanced Navigation Adaptive Control Display & Visualization (ER/EG) Mission Manager (Including Replanning & IVHM) RLV 20 EG/C. Scott Merkle Earlier R&T Milestones remaining FY02 2003 Requirements AR&C X-cutting Working Group Requirements & Basic Requirements & Design Ref Missions defined Systems Engineering 2004 Integrated Ground Tests Selections Ref Mission Analysis TRL 3 TRL 6 TRL 2/3 Sensor Trades (in-house, NRA) Consolidation of inhouse & NRA tasks Advanced GN&C Algorithms Integration & documentation Down Select Breadboards Navigation Sensors Architecture Inputs TRL 4 Systems Engineering Eng. Models TRL 3/4 Proto-type sys Design & test TRL 4 TRL 6 Hardware in Loop tests Down Select In-house + NRA prototypes Prime algorithms TRL 6 Feedback Lightweight Docking System System Perf. Analysis/Trades Crew & Ground Visualization Approach Perf. Analysis/Trades TRL 3 TRL 3 Gap Tech Integration System Level Design Prototypes 2006 2005 TRL 4 TRL 4 Grnd based system test Grnd based system tests TRL Proto-type sys TRL 6 5 Design & test TRL 5 Proto-Flt sys Design & test Integrated Ground Demo of Prototype H/W & S/W TRL 6 21 LEGEND Decision Point Strategic Program Objective