Nonlocal diffusion on bounded domains
advertisement

Nonlocal diffusion on bounded domains
Nonlocal Models in Mathematics, Computation, Science, and
Engineering
U.S. Association for Computational Mechanics
Oak Ridge National Laboratory
October 26-28, 2015
Mark M. Meerschaert
Department of Statistics and Probability
Michigan State University
mcubed@stt.msu.edu
http://www.stt.msu.edu/users/mcubed
Partially supported by NSF grants DMS-1462156 and EAR-1344280.
Abstract
Fractional derivatives were invented in the 17th century, soon
after their integer order cousins. They are the most commonly
applied nonlocal operators. In the past decade, an explosion
of practical applications has intensified interest in the subject.
Fractional differential equations are now being used in cell biology, ecology, electronics, hydrology, and medical imaging to
model anomalous diffusion, where a plume of particles spreads
faster than the traditional integer-order diffusion equation predicts. There now exist a variety of effective numerical methods
to solve fractional diffusion equations. However, the mathematically correct specification of a well-posed fractional diffusion on
a bounded domain remains an important open problem. The
main issue is to write appropriate boundary conditions, or their
fractional/nonlocal analogues. In this talk, we will discuss this
open problem, and some preliminary results.
Acknowledgments
Boris Baeumer, Maths & Stats, University of Otago, New Zealand
Zhen-Qing Chen, Mathematics, University of Washington
Ozlem Defterli, Math and Computer Sci, Cankaya U, Turkey
Marta D’Elia, Computer Sci Research Inst, Sandia National Labs
Qiang Du, Applied Physics & Applied Math, Columbia University
Max Gunzburger, Scientific Computing, Florida State U
Mihály Kovács, Maths & Stats, University of Otago, New Zealand
Rich Lehoucq, Comp Sci Research Inst, Sandia National Labs
Tomasz Luks, Mathématique, École Centrale de Marseille
René L. Schilling, Institute of Math. Stoch., TU Dresden
Alla Sikorskii, Statistics and Probability, Michigan State
Peter Straka, Applied Mathematics, U New South Wales
Fractional derivatives: An old idea gets new life
Fractional derivatives dαf (x)/dxα for any α > 0 were invented by
Leibniz soon after the more familiar integer derivatives.
Some derivative formulas extended to the fractional case:
dα h λxi
α eλx
e
=
λ
dxα
π
dα
[sin x] = sin x + α
dxα
2
dα
Γ(p + 1)
p−α
p
x
x
=
[
]
dxα
Γ(p − α + 1)
Riemann-Liouville fractional derivatives
The Riemann-Liouville fractional derivatives are defined by
1
dn x
f (u)
α
Dx,Lf (x) =
du
n
α+1−n
Γ(n − α) dx L (x − u)
Z
f (u)
(−1)n dn R
α
du
D−x,R f (x) =
n
α+1−n
Γ(n − α) dx x (u − x)
where n − 1 < α ≤ n.
Z
α
α f (x).
f
(x)
=
D
If f (x) = 0 for all x < L then Dα
f
(x)
:=
D
x
x,−∞
x,L
α f (x).
α
f
(x)
:=
D
f
(x)
=
D
If f (x) = 0 for all x > R then Dα
−x
−x,∞
−x,R
αˆ
Fourier transforms: Dα
±xf (x) ⇐⇒ (±ik) f (k) [Samko, (7.4)]
Here fˆ(k) :=
Z ∞
−∞
e−ikxf (x) dx.
Application to groundwater hydrology
SOXPH GDWD
B VWDEOH
*DXVVLDQ
1RUPDOL]HG 0DVV
1RUPDOL]HG 0DVV
Fractional diffusion equation with α = 1.1 captures power law
leading tail at the MADE experimental site [BSMW01].
SOXPH GDWD
B VWDEOH
*DXVVLDQ
E 6QDSVKRW GD\ D 6QDSVKRW GD\ /RQJLWXGLQDO 'LVWDQFH PHWHUV
/RQJLWXGLQDO 'LVWDQFH PHWHUV
Governing equation: ∂t c(x, t) = −0.12 ∂x c(x, t) + 0.14 Dα
x c(x, t)
Application to Ecology
Fractional derivatives model power law movements [BKM08].
P
2
1.7
∂tP = a Dx P + b ∂y P + rP 1 −
K
20
y
10
0
−10
−20
−20
0
20
40
60
80
100
x
Fractional diffusion jumps the barrier (nonlocal operator).
Real invasive species data shows this behavior.
Grünwald-Letnikov fractional derivatives
For any α > 0 we can define
−α ∆α f (x)
f
(x)
=
lim
h
Dα
±x
±h
h→0
where
∆α
±h f (x) :=
∞
X
j=0
wj f (x ∓ jh),
wj := (−1)j
(−1)j Γ(1 + α)
α
=
j
j!Γ(1 + α − j)
!
If f is bounded, and f (k) ∈ L1(R) for k ≤ n, for some n > 1 + α,
αˆ
then Dα
±xf (x) exists, and its FT is (±ik) f (k) [MS12, Prop 2.1].
α
Hence Dα
±xf (x) = D±xf (x), since they have the same FT.
Numerical methods
Explicit/implicit Euler schemes based on the standard Grünwald
approximation are unstable [MT04, Props 2.1, 2.3].
A stable, consistent implicit Euler method uses a shifted formula
∆α
±h,s f (x) :=
∞
X
j=0
!
α
(−1)j f (x ∓ (j + s)h),
j
and then for f ∈ L1(R) ∩ C n(R) we have [MT04, Theorem 2.4]
−α ∆α
Dα
±xf (x) = h
±h,s f (x) + O(h).
The proof uses Fourier transforms.
Grünwald derivative for finite R, L
A nice trick used by Chen and Deng (2014) sets f (x) ≡ 0 for
x < L and/or x > R, and then applies Fourier transform methods.
Then one can prove
−α ∆α f (x) + O(h)
f
(x)
=
h
Dα
x,L
h,s
by the same arguments. This approach also leads to stable higher
order methods (e.g., 4th order).
The proof (first order) using combinatorial methods is more delicate [Podlubny, pp. 49–55 and 62–63].
Numerical codes for fractional diffusion
Consider the fractional diffusion equation
α p(x, t) + c(x, t)
p(x,
t)
+
b(x,
t)D
∂tp(x, t) = a(x, t)Dα
−x
x
on a finite domain L < x < R, 0 ≤ t ≤ T .
Shifted Grünwald approximation ⇒ implicit Euler codes [MT04].
These codes are mass-preserving since
∞
X
j=0
!
α
(−1)j = 0.
j
Use operator splitting for 2-d [MST06] or reaction term [BKM08].
Other methods:
Finite elements [Fix and Roop, 2004; Wang and Yang, 2013;
D’Elia and Gunzburger, 2013]
Finite volume method [Zhang et al., 2005]
Spectral collocation method [Zayernouri and Karniadakis, 2014].
Numerical example
The fractional diffusion equation
∂tp(x, t) = a(x)Dx1.8p(x, t) + c(x, t)
on the bounded domain 0 < x < 1, with
p(x, 0) = x3
p(0, t) = 0
p(1, t) = e−t
Γ(2.2) 2.8
a(x) =
x
8
c(x, t) = −(1 + x)e−tx3
has exact solution p(x, t) = e−tx3 for all t > 0 [MT06].
Numerical solution
Crank-Nicolson solution at time t = 1.0 with ∆t = 1/10 and
∆x = h = 1/10 matches the exact solution [MT06].
0.4
0.35
0.3
0.25
Exact
CN
0.2
0.15
0.1
0.05
0
0
0.2
0.4
0.6
0.8
1
1.2
Error analysis
Crank-Nicolson method is first-order accurate. Richardson extrapolation yields a second order method [MT06].
∆t
1/10
1/15
1/20
1/25
∆x
1/10
1/15
1/20
1/25
CN Error
1.82×10−3
1.17×10−3
8.64×10−4
6.85×10−4
Rate
−
≈ 15/10
≈ 20/15
≈ 25/20
RE Error
1.77×10−4
7.85×10−5
4.41×10−5
2.83×10−5
Rate
−
≈ (15/10)2
≈ (20/15)2
≈ (25/20)2
Computing the exact solution
Not hard to check that
p=
(x
−
L)
Dα
x,L
Γ(p + 1)
(x − L)p−α
Γ(p + 1 − α)
α
(R − x)p =
D−x,R
Γ(p + 1)
(R − x)p−α
Γ(p + 1 − α)
If p(x, t) = e−tx3 then
∂tp(x, t) = −e−tx3
and
Γ(4) −t 1.2
1.8
Dx p(x, t) =
e x
Γ(2.2)
Plug into ∂tp(x, t) = a(x)Dx1.8p(x, t) + c(x, t) to get c(x, t).
Existence and uniqueness
There exists a solution p(x, t) = e−tx3 to the fractional PDE
∂tp(x, t) = a(x)Dx1.8p(x, t) + c(x, t)
on 0 < x < 1, with p(x, 0) = x3, p(0, t) = 0, p(1, t) = e−t,
c(x, t) = −(1 + x)e−tx3, and a(x) = Γ(2.2)x2.8/6.
Question: Is this solution unique?
1.8 p(x, t).
We assume p(x, t) = 0 for x ≤ 0 to make Dx1.8p(x, t) = Dx,0
Suppose for example that p(x, t) = 1 for −1 < x < 0. Then
Γ(4) −t 1.2
1
d2 0
1
1.8
Dx p(x, t) =
e x
+
dξ
2
0.8
Γ(2.2)
Γ(0.2) dx −1 (x − ξ)
i
0.8 h −1.8
3
−t
1.2
−1.8
e x
+
x
− (x + 1)
=
Γ(2.2)
Γ(0.2)
Z
and then c(x, t) must change. BC p(0, t) = 0 is under-specified.
Dirichlet problems: Nonlocal diffusion approach
Define the nonlocal energy semi-norm
1
|v(x) − v(y)|2γ(y, x) dy dx,
|||v||| :=
2 R×R
Z
with nonlocal kernel γ(y, x) = C|y − x|−α−1, the nonlocal energy
space V := {v ∈ L2(R) : |||v||| < ∞}, and the nonlocal volumeconstrained energy space
Vc := {v ∈ V : v(x) = 0 ∀ x ∈
/ (L, R)}.
Theorem. [DDDGLM15] For any p0 ∈ Vc , the symmetric fractional diffusion problem
α
∂tp(x, t) = Dα
x p(x, t) + D−xp(x, t)
p(x, 0) = p0(x)
p(x, t) = 0
for all L < x < R
for all x ∈
/ (L, R) and all t ∈ [0, T ]
has a unique solution in L∞([0, T ], Vc) ∩ H 1([0, T ], L2(R)).
Dirichlet problems: Semigroup approach
Let C02(L, R) denote the set of twice continuously differentiable
functions f : (L, R) → R such that f and its first and second
derivatives vanish at the end points. Can extend to C0(R) by
setting f (x) = 0 for x ∈
/ (L, R).
Theorem. [BLM15] For any p0 ∈ C02(L, R), the fractional diffusion problem
β
∂tp(x, t) = a Dα
x p(x, t) + b D−xp(x, t)
p(x, 0) = p0(x)
p(x, t) = 0
for all L < x < R
for all x ∈
/ (L, R) and all t ∈ [0, T ]
has a unique solution in C0(L, R).
Idea of proof: Any doubly Feller process has the same generator
as the killed process on a regular domain. This includes any Lévy
generator on Rd (stable, tempered stable, etc.).
Reflected stable process
α
ikY
t(ik)
t
Take a stable Lévy process Yt with E[e
] = e
for some
1 < α ≤ 2, with no positive jumps. Then the reflected process
Zt = Yt − inf{Ys : 0 ≤ s ≤ t}
is a Markov process on the real line [BKMSS15, Theorem 2.1].
Application: If ∂tp = Ap governs the Markov process X(t), then
β
∂t p = Ap governs X(Zt) for β = 1/α [BKMSS15, Theorem 4.1].
Here A generates the C0 semigroup Ttf (x) = E[f (Xt)|X0 = x],
and the Caputo derivative
β
∂t f (t) :=
∞
t−β
1
β
′
−β
f (t − u)u du = Dt f (t) −
f (0).
Γ(1 − β) 0
Γ(1 − β)
Z
Reflected stable sample path
50
0
−100
Y
150
Stable process Yt (thin line) with α = 1.3 and reflected stable Zt
(thick line). See Appendix for R code.
0
200
400
600
t
800
1000
Fractional reflecting boundary condition
The probability densities p(x, t) of the reflected stable process
x = Zt solve the forward equation [BKMSS15, Theorem 2.3]
∂tp(x, t) = Dα
−xp(x, t);
Dα−1
−x p(0, t) = 0.
Without the reflecting boundary condition Dα−1
−x p(0, t) = 0, the
fractional PDE ∂tp(x, t) = Dα
−xp(x, t) governs the stable process
Yt on the entire real line.
The BC Dα−1
−x p(0, t) = 0 is a no-flux boundary condition, just like
the α = 2 case where Yt is a Brownian motion.
The backward equation is [BKMSS15, Theorem 2.1]
∂tp(x, t) = ∂xαp(x, t);
∂xp(0, t) = 0.
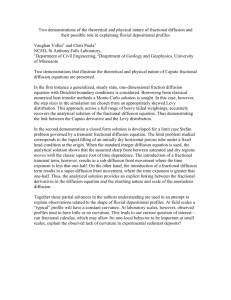
Reflected stable transition density
Transition densities y 7→ p(x, y, t) with index α = 1.8 and initial
state x = 0, 1, 2, 4 (left to right) at times t = 0.5 (left), t = 1
(middle), and t = 2 (right). See Appendix for Matlab code.
0.8
0.8
0.8
0.6
0.6
0.6
0.4
0.4
0.4
0.2
0.2
0.2
0
0
5
0
0
5
0
0
5
Ongoing Research: Reflected stable on [a, b]
Plan [CM15]: Take a stable Lévy process Yt with negative jumps
ĉ(k, t) = E[e−ikYt ] = et(−ik)
α
for some 1 < α ≤ 2, and reflect to stay in [a, b].
Burdzy et al. (2009) solve the Skorokhod Problem:
Zt = Yt + At − Bt ∈ [a, b], At, Bt are non-decreasing, and
Z ∞
0
I(Zt > a)dAt =
Z ∞
0
I(Zt < b)dBt = 0.
Apply the Itô Representation and the compensation formula to
compute the backward generator.
Compute adjoints (integration by parts) to get the forward generator and the BC.
Governing equations on [a, b]
Preliminary result [CM15]: The forward equation is
∂p(x, y, t)
α p(x, y, t);
= D∂[y,b]
∂t
The backward equation is
α−1
∂[y,b]
p(x, a+, t) = 0, ∂y p(x, b−, t) = 0.
∂p(x, y, t)
α−1
α p(x, y, t);
= D∂[a,x]
∂[a,x]
p(b−, y, t) = 0, ∂xp(a+, y, t) = 0.
∂t
Here the finite domain Caputo fractional derivatives are
x
1
α
f (n)(y)(x − y)n−α−1dy
∂[a,x]f (x) =
Γ(n − α) a
n Z b
(−1)
α f (x) =
∂[x,b]
f (n)(y)(y − x)n−α−1dy
Γ(n − α) x
Z
with n − 1 < α < n, as in del-Castillo-Negrete (2006).
Interpret: Fractional BC prevents jumps past a, first order BC
prevents drift past b, in the forward equation.
References
1. B. Baeumer, M. Kov acs and M.M. Meerschaert, Numerical solutions for fractional
reaction-diffusion equations, Computers and Mathematics with Applications, 55 (2008),
2212–2226.
2. B. Baeumer, M. Kováks, M.M. Meerschaert, P. Straka, and R. Schilling (2015) Reflected spectrally negative stable processes and their governing equations. Trans. Amer.
Math. Soc., to appear. Preprint at www.stt.msu.edu/users/mcubed/ReflectedStable.pdf
3. B. Baeumer, T. Luks and M. M. Meerschaert (2015) Pointwise solutions for fractional
Cauchy problems on bounded domains. In progress.
4. D.A. Benson, R. Schumer, M.M. Meerschaert and S.W. Wheatcraft (2001) Fractional
dispersion, Lévy motions, and the MADE tracer tests. Transport in Porous Media 42,
211–240.
5. M. Chen and W. Deng, Fourth order accurate scheme for the space fractional diffusion
equations. SIAM J. Numer. Anal. 52 No 3 (2014), 1418–1438
6. Z.-Q. Chen and M.M. Meerschaert, Governing equations for reflected stable processes
on an interval, in progress.
7. O. Defterli, M. DElia, Q. Du, M. Gunzburger, R. Lehoucq, and M.M. Meerschaert,
Fractional Diffusion on Bounded Domains. Fractional Calculus and Applied Analysis,
18 (2015), No. 2, 342–360.
8. D. del-Castillo-Negrete, Fractional diffusion models of nonlocal transport. Phys. Plasmas 13 (2006) 082308.
9. M. D’Elia and M. Gunzburger, The fractional Laplacian operator on bounded domains
as a special case of the nonlocal diffusion operator. Comput. Math. Appl. 66 (2013),
1245–1260.
10. Q. Du, M. Gunzburger, R. B. Lehoucq, and K. Zhou, Analysis and approximation of
nonlocal diffusion problems with volume constraints. SIAM Review 54 (2012), 667–696.
11. G.J. Fix, J.P. Roop, Least squares finite element solution of a fractional order two-point
boundary value problem, J. Comp. Math. Appl. 48 (2004) 10171033.
12. M.M. Meerschaert and C. Tadjeran, Finite difference approximations for fractional
advection-dispersion flow equations. J. Comput. Appl. Math. 172 (2004), 65–77.
13. M.M. Meerschaert and C. Tadjeran, Finite difference approximations for two-sided
space-fractional partial differential equations, Appl. Numer. Math. 56 (2006), 80–
90.
14. M.M. Meerschaert, H.P. Scheffler and C. Tadjeran, Finite difference methods for twodimensional fractional dispersion equation, Journal of Computational Physics, Vol. 211
(2006), No. 1, 249–261
15. M. M. Meerschaert and A. Sikorskii (2012) Stochastic Models for Fractional Calculus.
De Gruyter Studies in Mathematics 43, De Gruyter, Berlin, 2012, ISBN 978-3-11025869-1.
16. A. Pazy (1983) Semigroups of linear operators and applications to partial differential
equations. Springer-Verlag, New York, Berlin, Heidelberg, Tokyo.
17. I. Podlubny (1999) Fractional Differential Equations. Academic Press, San Diego.
18. C. Tadjeran, M.M. Meerschaert, and H.-P. Scheffler (2006) A second order accurate
numerical approximation for the fractional diffusion equation. J. Comput. Phys. 213,
205–213.
19. H. Wang and D. Yang (2013) Wellposedness of Variable-Coefficient Conservative Fractional Elliptic Differential Equations. SIAM J. Numer. Anal. 51, No. 2, 1088–1107.
20. M. Zayernouri and G. Em Karniadakis (2014) Fractional Spectral Collocation Method.
SIAM J. Sci. Comput. 36, No. 1, A40–A62.
21. X. Zhang, J.W. Crawford, L.K. Deeks, M.I. Shutler, A.G. Bengough, I.M. Young, A
mass balance based numerical method for the fractional advection dispersion equation:
theory and application, Water Resour. Res. 41 (2005) 110.
Reflected Brownian motion
The PDF of a reflected Brownian motion solves the diffusion
equation ∂tp = ∂x2p with a reflecting boundary condition:
∂
p(x, t)
∂x
x=0+
p(x + h, t) − p(x, t) := lim
h→0+
h
=0
x=0
In the stable case, the reflecting boundary condition is
α−1
D−x p(x, t)
:= lim
x=0+
1
h→0+ hα−1
where
wkα := (−1)k
∞
X
k=0
α−1
wk p(x + kh, t)
=0
x=0
Γ(α + 1)
k!Γ(α − k + 1)
When α = 2, w0α−1 = 1, w1α−1 = −1, and wkα−1 = 0 for k > 1.
R code for reflected stable sample path
# Plot stable Y_t with characteristic function exp(t(ik)^a)
# and the reflected stable process Z_t=Y_t-inf{Y_u:0<=u<=t}
#
# You need to install the stabledist package on your R platform.
# Try Packages > Load package to see if stabledist is available.
# If not then use Packages > Install package(s)
library(stabledist)
t=seq(1:1000)
a=1.3
g=(abs(cos(pi*a/2)))^(1/a)
y=rstable(t,alpha=a,beta=-1.0,gamma=g,delta=0.0,pm=1)
Y=cumsum(y)
Z=Y-cummin(Y)
plot(t,Y,type="l",ylim=c(min(Y),max(Z)))
lines(t,Z,lwd=2)
axis=t-t
lines(t,axis)
MATLAB code for reflected stable pdf
%%% Matlab script to compute p(x,y,t)
%% enter variables
alpha=1.2; ymax=12; N=1200; t=[0,.5,1,2]; x=2;
%% initialise parameters
h=ymax/N; y=(h:h:ymax)’;
u0=zeros(N,1);u0(floor(x/h)+1)=1/h; % initial condition
%% Make Grunwald matrix
w=ones(1,N+1);
for k=1:N
w(k+1)=w(k)*(k-alpha-1)/k;
end
w=w/h^alpha;
M=spdiags(repmat(w,N,1),-1:1:N-1,N,N); %enter w’s along diag
M(1,:)=-cumsum(w(1:N))’; %change first row for BC
%% Solve ODE system
[~,p]=ode113(@(t,u) M*u,t,u0);