Document 11863948
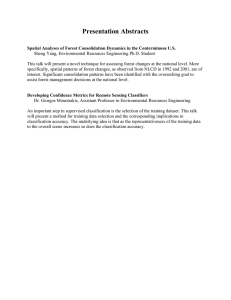
advertisement

This file was created by scanning the printed publication. Errors identified by the software have been corrected; however, some errors may remain. Large Scale Tropical Forest Change Monitoring Using Multiple Resolution Satellite Data :from Hot Spot Detection to Global Deforestation Assessment ? Hervk ~eanjean',Frkdkric -- chard^ and Jean-Paul h4alingreau3 - Abstract - The rate of tropical forest degradation and deforestation is a serious threat on environmental issues, socio-economic balances and land use planning and is considered as a major concern for decision-makers at global, regional and local scales. Appropriate tools are needed to address this multiscale and multipurpose issue. Sampling techniques can be applied in large forest surveys using high resolution satellite data. "Wall to wall" coverage is a feasible alternative, but due to the high cost of data, low resolution satellite data are more adapted to this method, provided that estimations are corrected using multistage procedures. Recent advances have proved that this approach is feasible for mapping and assessing tropical forest on large scale with reasonable accuracy. However, for forest change detection and monitoring, few methods have been developed so far enabling the estimate of change at global scale. In this paper, change detection based on a combination of LRSD such as AVHRR data and HRSD such as TM and SPOT data is addressed. A preliminary investigation is carried out in a pilot area in Southeast Asia where changes detected with HRSD (hot spot areas) are compared with AVHRR forest class proportions and fragmentation patterns. A discussion is then proposed on the necessary steps towards an operational system for global tropical forest monitoring. INTRODUCTION Tropical forests constitute fragile ecosystems which shelter most of the world animal and vegetal species. Playing an essential role in global environmental and climatic balance, tropical forests are threatenend by a fast disappearance whith dramatic consequences on biodiversity loss, shortage of wood and non-wood products, soil degradation and erosion, deterioration of hydrological systems, disruption of local socioeconomic development.. . According to the last estimates of F A 0 FRA 1990, 15.4 millions ha of tropical forests have disappeared each year between 1980 and 1990, which represent an average deforestation rate of 0.8 % of total tropical forest resources. In 1980, tropical forests were estimated at 1,910 millions ha, and 1,756 millions ha in 1990. The deforestation mechanism has become a critical issue not only for the countries where this problem is a real concern, but also for the international scientific community who has launched Remote sensing and CIS expert in forestry, SCOT Conseil, 1 rue HermEs, F-31526 Ramonville France MTV Group, TREES Project Manager, Institute of Remote Sensing Applications, 1-21020 Ispra Italy Head of Monitoring Tropical Vegetation Unit, TREES Project Coordinator, Institute of Remote Sensing Applications, 1-21020 Ispra Italy important research programmes to better evaluate its exact magnitude and to improve the knowledge of the different factors interacting in this complex processus. Intensive logging practices, shifting cultivations and conversion of forest lands to agricultural areas are some of the main causes, direct or undirect, of deforestation. Above all, the modes of appropriation of forest lands by local farmers represent in many cases a critical issue which interacts with legal aspects of land management. To tackle the environmental effects of deforestation, one of the necessary actions consists in building up a continuous monitoring systems along three major steps : (1) development of sound methods for estimating forest areas (static approach), (2) development of sound methods for estimating forest cover changes on a quantitative and structural basis (dynamic approach) and (3) modeling of deforestation processes (anticipating approach). Considerable advances have been made on the development of methods for retreiving forest proportions based on CRSD. Few methods have been developed for change detection and quantification, and they are generally using sampling techniques with HRSD. The modeling of deforestation requires to consider many parameters which encompass not only the vegetation characteristics of the area, but also physical and anthropic characteristics. This paper is mainly addressing the second issue, after reviewing some techniques for global estimates of forest areas. GLOBAL ESTIMATE OF FOREST COVER PROPORTION The main actors As far as global assessment is concerned, CRSD such as AVHRR data can provide valuable information for forest resources assessment. Future sensors (vegetation instrument on board SPOT 4 and MODIS) are expected to give further possibilities in this field. Several institutions or programmes have already started significant activities in global survey of tropical forests : (i) the European Union with the TREES Project (TRopical Ecosytem Environment observation by Satellites) where wall to wall coverage is made using AVHRR data with a sample of HRSD for calibration purposes, (ii) F A 0 with the Forest Resources Assessment 1990 project where TM data are sampled over the entire tropical belt, (iii) IUFRO (International Union of Forest Research Organizations) which has published some guidelines for forest monitoring (Paivinen, 1994), (iv) NASA which is carrying out several projects in South America and Africa (Landsat Pathfinder project in the framework of the Global Change Research Programme : Chomentowski et al., 1994), (v) UNEPIGRID which has undertaken some global analysis with AVHRR data in the amazon basin, and has been involved with TREES in Southeast Asia, (vi) the Woods Hole Research Centre which has realized a map of South America using different sensors, (vii) IUCN (International Union for Conservation of Nature and Natural Resources) and WCMW (World Conservation and Monitoring Centre) which published in the 1990's the Conservation Atlas of Tropical Forests, (viii) IGBP (International Global Biosphere Programme) which is working on global change issues. Over Africa, other regional initiatives with environmental components are in progress or in preparation : the CARPE (Central African Regional Program for Environment), and RIMP (Regional Information Management Programme). Existing methods for global forest survey Four different methods can be applied for estimating tropical forest areas on a global basis (Czaplewski, 1992). A first approach is consisting in compiling forest statistics provided by national or regional forest inventories. F A 0 used this approach in 1980 and to a limited extent in 1990. The main problems of this method are the discrepancies between the nomenclatures, the variables, the accuracy in the sampling designs, the dates of the inventories. A second method is based on the analysis of a wall to wall coverage of CRSD data (AVHRR data). In this approach, forest resources can be mapped, e.g. located, and estimated using some AVHRR classification schemes. However, the estimation of forest proportion is presenting a systematic bias due to aggregation effects. The magnitude of this error depends on three factors : the spatial resolution of the map, the initial proportions of forest in the landscape, and the spatial arrangement of forest at fine resolution (Turner et al., 1989; Moody and Woodcock, 1994). It is therefore recommended to apply a correction function which may be derived from a double sampling design with regression estimator. The regression is performed between the auxiliary variable, measured from the AVHRR data set, and the target variable, measured on a sample of HRSD sites. This method has been successfully implemented by the TREES project (Mayaux et Lambin, 1995). The third method is aimed at estimating forest proportion from a sample of high resolution images : this method has been tested and implemented by F A 0 in the Forest Resources Assessment 1990. Moreover, if several images are acquired on each site, it is possible to estimate the deforestation rate. F A 0 has estimated the deforestation rate between 1980 and 1990. In the fourth approach, national mapping results are compiled at regional or global level : as for the first method, this approach is limited by the discrepancies in nomenclature, scales and dates. The multi scale approach The second method, based on CRSD such as AVHRR data, is the only one providing some estimates of global forest resources and a location of those resources at the same time. To increase the accuracy of the estimate, many investigators suggested to use HRSD as reference data (Tucker and al., 1984; Nelson and Holben, 1988; Woodwell and al., 1987; Malingreau and Tucker, 1988; Paivinen and Witt, 1988; Malingreau and al., 1989; Stone and al., 1990; Nelson and Homing, 1993). The main advantage of this approach is the daily availability of data, and the spatial resolution (1.1 Km) which is more adapted to the scale of study. However, using coarse resolution satellite data leads to a loss of details which depends on the spatial structure of the landscape (Woodcock and Strahler, 1987; Townshend and Justice, 1988). The integration of high resolution satellite data represents a double advantage with the possibility to first validate the broad scale maps by comparing fine scale observations with AVHRR classification and second to develop a correction function with respect to proportional errors in order to estimate tropical forest areas from coarse resolution classifications. Building a correction function :the lessons of the TREES project The Joint Research Centre TREES project is aimed at mapping and estimating tropical forest resources, detecting and monitoring changes and modeling deforestation (Malingreau and al., 1993). A correction model for proportional errors has been tested and developed. To calibrate broad scale tropical forest area estimates, an inverse calibration model was applied (Brown, 1982; Czaplewski, 1992) by integrating in the double sampling approach a measure of the spatial fragmentation of the forest-non forest interface (Mayaux and Lambin, 1995). The inversion model can be expressed as (Eq. 1): where PF, is the forest proportion at fine scale, PC, the forest proportion. at broad scale, and Sc, a descriptor of the spatial pattern of the class i at coarse resolution. Several tests have shown that the Matheron index (Kleinn et al., 1993) is a good descriptor of the spatial structure in AVHRR classifications. It is defines as (Eq. 2) : number of runs between forest and other cover type pixels M= (2) ,/(number of forest pixels),/(total number of pixels) The two-step correction model for aggregation errors, in which forest cover proportion at fine and coarse resolution as well as the fragmentation index are calculated in l3x 13 AVHRR pixels blocks, was developed with two major regression phases : first, a linear regression was performed within each equal-size subset of similar spatial pattern between forest cover proportions at fine and coarse resolution, and second, a regression was performed between the fragmentation measure and the intercept and the slope of the previous regressions. This calibration procedure improved by 25.5 % the reliability of the retrieval of forest cover proportions from coarse resolution data by comparison to a simple correction function relating directly proportions at coarse and fine resolutions (Mayaux and Lambin, 1995). Further improvements are in progress, with the introduction of spectral mixture models at coarse resolution scale. The integration of spatial information in the mixed pixel estimator improved significantly the reliability of the model (Mayaux and Lambin, 1996). FOREST CHANGE DETECTION Digital change detection methods Forest ecosystems are in continuous evolution. Changes can be defined as "an alteration in the surface components of the vegetation cover" (Milne, 1988) or as "a spectrallspatial movement of a vegetation entity over time" (Lund, 1983). The intensity of change can be abrupt (clear cutting, deforestation, and forest fires) or diffuse and gradual (stands growth). Various classifications of forest change have been proposed by Aldrich (1975) who suggested nine general forest disturbance classes, by Colwell (1980) who proposed a more hierarchical framework, and by Hame (1986) who took a more mechanistic view of the problem. Ecological aspects have been then developed by Hobbs (1990), and Khorram (1994) who concentrated more on the spatial environment in which the change occurs. Critical issues in forest change detection are the appropriate selection of images, the choice of sensors, the change categories and the change detection algorithms (Coppin, 1994). Moreover, the change interval length, e.g. the temporal resolution, is a key aspect in change detection. The accuracy of forest cover change information is closely related to the maximization of the signal-to noise ratio. When this ratio is not optimum, unreal changes may be detected, and are caused by differences in scattering conditions, differences in water content in the atmosphere, variations in the solar azimuth angles, and sensors calibration inconsistencies (Hade, 1988). Most digital change detection methods are based on per-pixel classifiers (Teuber, 1990). But the decision rules, which comprise the complete range of pattern recognition techniques, constitute the most sensitive aspect in any change detection model. Numerous detection algorithms have been developed during the past years. They can be grouped into two main categories : change measurement methods, and classification schemes (Malila, 1980; Pilon and al., 1987). It is also possible to separate the simultaneous analysis of multitemporal data versus comparative analysis of independent single date classifications (Singh, 1989). Change detection methods may be characterized by two main phases : first the data transformation procedure, and second the analysis techniques applied to delineate the changed areas (Nelson, 1983). The transformation procedure can be no transformation (raw data), images differencing, bands ratioing, vegetation index differencing, regression between bands, multitemporal linear data transformation (principal component analysis and tasseled cap), change vector analysis, and comparison of single date classifications. The analysis techniques used to detect change are usually deriving from thresholding, supervised or unsupervised classification, spatial analysis, or layered spectral/temporal analysis. For a review of change detection techniques, see Singh (1989) and Coppin (1994). The multi scale approach in change detection How to conciliate broad scale and fine scale observations Most of the detection change studies have used high resolution satellite data since the changes are easier to detect at fine scale. At broad scale, change vector analysis techniques have been applied to characterize vegetation changes in Africa (Lambin and Strahler, 1994). Very few studies have been carried out using several resolution satellite data. As far as vegetation monitoring at global scale is concerned, there is a need to get observations at different scales both in temporal and spatial terms (Malingreau and Belward, 1992). A relationship between forest clearing rate based on MSS-TM analysis and fire activity based on AVHRR interpretation was studied in Mato Grosso, Brazil (Nelson and al., 1987). The results suggested to use AVHRR data as a stratification tool rather than as a auxiliary variable in the sampling design. Townshend and Justice (1995) have looked into the spatial frequencies of two MSS single date images and of the change image obtained by substracting the NDVI. Considerable variability in the spatial frequency was found on the two images, with a spatial resolution ranging from 125 m to 64 Km. But no relationship was detected between the spatial frequencies of the two single date images and the change image. To estimate changes, a simple approach can be applied consisting in substracting one map (or classification) from another. But the bias and the resulting variance are unknown and might be substantial. Statistical procedures were tested for estimating change from thematic maps available for the same region at two times (Van Deusen, 1994). Subsampling was used to obtain estimates of the true class of some pixels at each of the two times. Simulation results verified that the procedures produce unbiased estimates and that associated variance estimates are reliable. Van Deusen pointed out that this statistical approach could be applied on low resolution thematic maps by using subsamples of high resolution data to refine the true class proportions. In a global forest monitoring exercise, Beltz and al. (1992) recommended to use multi-stage sampling with sampling units proportional to forest cover or deforestation, and sampling with partial replacement. A correction function for change detection As for the estimate of forest areas, an inverse correction model can be built to refine the estimate of forest cover changes. A simple model can be built by relating the estimate of change at broad scale with the estimate of change at fine scale (Eq. 3 ) : where APF, and APci are the estimates of changes at fine scale and coarse scale of class i between time tl and t2. The introduction of the spatial structure in the model would lead to the following equation (Eq. 4) : where Sc, (t ,) and Sc (t ,) are the measurements of the forest spatial patterns at time t and t2. SC,(t characterizes the spatial structure at the inital stage, e.g. at the beginning of the time inteval during which the change in forest proportion will be estimated : this a priori knowledge of the spatial arrangement of forest cover can be considered as an indicator of future deforestation. A fragmented pattern with many forest-non forest contacts may be more sensitive to deforestation than a continuous block of forest cover. However, this indicator of future deforestation and the magnitude of change are very much depending on the type of deforestation, e.g. logging activities, clear cutting, shifting cultivations ...etc. On the contratry, Sc, (t )characterizes the spatial structure at the end of the interval, and thus can be considered as an indicator of past deforestation activities. When CRSD data are not available at time tl and t2, the correction model can be simplified as follows (Eq. 5), whith t, being between tl and t2 : , Preliminary results on a test site A study was carried out on a test area located in Vietnam where deforestation is very active, and field observations were available. An AVHRR classification from 199293 and a TM scene (124152 from December 30, 1990) were provided by the TREES project. A SPOT image was purchased (KJ 277-326 from February 25, 1995). The acquisition periods of the TM and SPOT scenes correspond to the dry season. Geometric corrections were performed between all satellite data with a common projection system. The total RMS between the SPOT scene and the TM scene was 0.13 pixel. The RMS obtained between AVHRR data and the TM scene was 0.1 1 AVHRR pixel. A multitemporal unsupervised classification was performed using the three bands of SPOT and the first five bands of TM. The classes were then grouped into four classes : unchanged forest, unchanged non forest, deforested areas (between 1990 and 1995), and clouds or shadows. The AVHRR classification is giving three main classes : dense forest (forest cover percentage over 70 %), fragmented forest (forest cover percentage between 40 and 70 %), and non forest (forest cover percentage below 40 %). Forest cover proportions were calculated in 9x9 blocks of AVHRR pixels. . Figure 1 Relationship between the deforestation rate at fine scale and the proportion of AVHRR fragmented forest. Proportion of AVHRR fragmented forest (1993) The relationship between the deforestation rate measured at fine scale and the proportion of AVHRR fragmented forest (figure 1) shows a rather good correlation (coefficient of determination is 0.61). It can be noticed that the deforestation rate increases with the proportion of fragmented forest, but this trend stops at a proportion of 50 %. A similar trend is observed with the Matheron index, with a less good correlation with the deforestation rate (r2 = 0.33). On the contrary, when AVHRR dense forest increases, the deforestation rate decreases. It can be concluded that the deforestation rate is in this case governed by the fragmentation pattern observed at broad scale. The AVHRR classification and the TMISPOT classification are presented in figure 2. Figure 2 . Left : multitemporal classification TM(1990)-SPOT(1995)with unchanged forest (black), unchanged non forest (white) and deforestated areas (grey). Right : AVHRR classification (1993) with dense forest (black), fragmented forest (grey) and non forest (white). It can be concluded that there is a consistent relationship between the estimate of deforestation at fine scale and forest cover parameters at broad scale. The AVHRR fragmented forest class is already containing some information of the degree of fragmentation within the pixel. The fragmentation pattern measured with the Matheron index in a block of pixels is likely to improve the correction model. However, more HRSD sites are needed to test the model and its real performance. Moreover, it is suggested to develop a more complete model integrating the estimate of forest cover change at broad scale (eq. 4). For this purpose, a more complete set of AVHRR data is required. Phase 2 of the TREES project which has just been launched should focus on global forest cover change with the acquisition and processing of new AVHRR data set. It can be also pointed out that the correction model should pave the way for a global deforestation model with the integration of auxiliary parameters such as socio-economic data, population figures, infrastructure, and local environment conditions (topography, soils...). The Tropical Forest Information System (TFIS) set up by the TREES project will be the basis for reaching this final goal. REFERENCES Achard F., and D'Souza G., 1994, Collection and processing of NOAA AVHRR 1 km resolution data for tropical forest resource assessment, TREES Series A: Technical document n02, EUR 160% EN, European Commission, Luxembourg, 58p. Beltz R., Evans D., Czaplewski R.L. and Van Deusen P., 1992, National forest area and rates of change estimates using satellite data, Report of the UNEPIFAO Expert Consultation on Environmental Parameters in Future Global Forest Assessments. Belward A.S., 1992, Spatial attributes of AVHRR imagery for environmental monitoring, Int. J. Remote Sensing, vol. 13, N02, 193-208. Chomentowski W., Salas B. and Skole D., 1994, Landsat Pathfinder project advances deforestation mapping, GIs World 7(4): 34-38. Coppin P.R. and Bauer M.E., July 1994, Processing of multitemporal landsat TM imagery to optimize extraction of forest cover change features, IEEE Transactions on geoscience and remote sensing, Vol. 32, N04. Coppin P.R., September 1994, Digital change detection in forest ecosystems: where are we and where are we going?, ISPRS, Proceedings "Resource and environmental monitoring", Brazil. Czaplewski R.L. and Catts G.P., 1992, Calibration of remotely sensed proportion or area estimates for misclassification error, Remote Sens. Environ. 39:29-43. Czaplewski R.L., Analysis of alternative sample survey designs, F A 0 1991. Food and Agriculture Organization, 1993, Forest resources assessment 1990: tropical countries, F A 0 Forestry Paper 112, Rome, 6 1pp. Jeanjean H., Malingreau J.P. and Achard F., 1994, Tropical forest fragmentation: typology and characterisation, in Proceedings of the European Symposium on Satellite Remote Sensing, 26-30 September, Rome. Klein C., Dees M. and Pelz D.R., 1993, Sampling aspects in the TREES project: global inventory of tropical forests, Final report to the Joint Research Center, Contract no 5014-92-10 ED ISP D, Universitat Freiburg, 36pp. Lambin E.F. and Strahler A.H., 1994, Change-vector analysis in multitemporal space: a tool to detect and categorize land-cover change processes using high temporal-resolution satellite data, Remote Sens. Environ. 48:23 1-244. Lambin E.F. and Strahler A.H., 1994, Indicators of land-cover change for change-vector analysis in multitemporal space at coarse spatial scales, Int. J. Remote Sensing, Vol. 15, NOIO,209921 19. Malingreau J.P. and Belward A.S., 1992, Scale considerations in vegetation monitoring using AVHRR data, Int. J. Remote Sensing, Vol. 13, N012, 2289-2307. Malingreau J.P. and Tucker C.J., 1988, Large scale deforestation in the Southeastern Amazon Basin of Brazil, AMBIO 17:49-55. Malingreau J.P. and Tucker C.J., 1990, Cover, Ranching in the Amazon Basin, Large-scale changes observed by AVHRR, Int. J. Remote Sensing, Vol. 11, N02, 187-189. Malingreau J.P., Achard F., D'Souza G. et al., 1995, AVHRR for global tropical forest monitoring: the lessons of the TREES project, Remote Sensing Reviews 12: 29-40. Malingreau J.P., Tucker C.J. and Laporte N., 1989, AVHRR for monitoring global tropical deforestation, Int. J. Remote Sensing 10: 855-867. Mayaux P. and Lambin E.F., 1995, Estimation of tropical forest area from coarse spatial resolution data: a two-step correction function for proportionnal errors due to spatial aggregation, Remote Sensing Environ. 53: 1-15, Elsevier Science Inc. Mayaux P. and Larnbin E.F., September 1995, Improvements of the calibration of coarse resolution tropical forest area estimates with spatial texture measures, Manuscript submitted to Remote Sensing of Environment. Moody A. and Curtis E. Woodcock, May 1994, Scale-dependent errors in the estimation of landcover proportions: implications for global land-cover datasets, Photogrammetric Engineering & Remote sensing, Vol. 60, N05, 585-594pp. Nelson R. and Holben Brent, 1986, Identifying deforestation in Brazil using multiresolution satellite data, Int. J. Remote Sensing, vol. 7, N03, 429-448. Nelson R., February 1989, Regression and ratio estimators to integrate AVHRR and MSS data, Remote Sens. Environ. 30:2Ol-2 16. Nelson R., Horning N. and Stone T.A., 1987, Determining the rate of forest conversion in Mato Grosso, Brazil, using Landsat MSS and AVHRR data, Int. J. Remote Sensing, Vol. 8, N012, 1767-1784. Paivinen R., 1994, IUFRO International guidelines for forest monitoring, Directrices internacionales de IUFRO para la monitorizacion de 10s recursos forestales, IUFRO World series, Vol. 5, ISSN 1016-3263. Sader S.A. and Winne J.C., 1992, RGB-NDVI colour composites for visualizing forest change dynamics, Int. J. Remote Sensing, Vol. 13, N016, 3055-3067. Singh A., 1989, Digital change detection techniques using remotely-sensed data, Int. J. Remote Sensing, Vol. 10, N06, 989-1003. Stone T.A. and Schlesinger P., June 1990, Monitoring deforestation in the tropics with NOAA AVHRR and Landsat data. Townshend J.R.G. and Justice C.O., 1988, Selecting the spatial resolution of satellite sensors required for global monitoring of land transformations, Int. J. Remote Sensing, Vol. 9, N02, 187-236. Townshend J.R.G. and Justice C.O., 1995, Spatial variability of images and the monitoring of changes in the Normalized Difference Vegetation Index, Int. J. Remote Sensing, Vol. 16, N012, 2187-2195. Van Deusen P.C., 1994, Correcting bias in change thematic maps, Remote Sens. Environ. 50:6773. Woodcock C.E. and Strahler A.H., 1987, The factor of scale in remote sensing, Remote Sens. Environ. 21:311-332. Zhu Z., 1994, Forest density mapping in the lower 48 States: a regression procedure, U.S. Department of Agriculture, Forest Service, Southern Forest Experiment Station, New Orleans, LA, Research Paper SO-280,9pp.