Stereoscopic Linescan Camera of Optoelectronics, D-8031 Oberpfaffen- Aerospace
advertisement

Stereoscopic Linescan Camera
"",,,VAL Jl..ll.JLfiU.!l
Aerospace
hs1tabjllstmu~nt,
of Optoelectronics, D-8031 Oberpfaffen-
camera of
generates three differently inclined scan planes by 3 parallel
CCD linear arrays in one common focal plane. In the case of flat terrain this imaging
geometry shows low inherent stability
photogrammetric block adjustment. Therefore
correlations of neighbouring observation stations by Gau.B-Markov processes are introduced
as pseudo observation equations. Characteristics of satellite orbit and attitude dynamics are
analysed to
and weight
process. Suitability of this approach was studied
........-"'-''-'>-1
1.
Threefold stereoscopic
cameras were planned for STEREOSAT and MAPSA T
resolution camera of similar type is now under development
missions. Stereo-MOMS, a
for
German
space-lab mission. An earlier and more prolonged test and demonstration
camera type is expected from MEOSS, a German-Indian satellite
of the capabilities of
mission.
of the medium resolution MEOSS camera is expected in mid 1988. Detailed
information on technical, mission and application aspects of MEOSS is given in this supplements by
( 1) .
Definition of geometric relations between the three continuous image stripes can be tried in
different ways.
main concepts are based
on orbit and attitude control, as planned
for MAPSAT, or on photogrammetric
as planned for MEOSS and Stereo-MOMS.
The image-coordinates of homologous
representing the same ground feature
three image stripes are used to
photogrammetric analysis.
Since the orientation parameters OP's (position and attitude) are continuously changing
case of linescanners, only a ..... _T"..'.~
a
image of MEOSS, can be of metric
will be
at regular time intervals (oriquality.
MEOSS the OP's of the
in between. This scheme was originally
entation intervals OI's) with
proposed by
(2).
& ..
Institute.
. ."".-
Tsu!mba~jtn.3!!J~
a visiting scientist.
1... 1
at DFVLR from July '87 to March '89 as
The OP's of the MEOSS camera will be correlated by HP's with a stepwidth of one baselength B. In case of constant height and flight velocity over flat terrain the analysis by HP's
is becomrning unstable as shown first by Hofmann (3). The reason is, that indiviual correlation chains of stepwidth B, which start at different positions (phase) within the first B
independent. Drescher et al. (4) indicated that certain periodic changes of orientation
parameters OP's, which are resonant to the baselength B, can be equivalently interpreted by
constant OP's and periodic terrain profiles (resonance problem).
To avoid this mathematical ambiguity, additional ............'...... . ,.. "". constants or pseudo observations
have to be introduced.
The
~1I,"I"lII1IlI.'I'1ot-lIr1>1I"Il
Software
To allow sytematic studies of the effects of satellite dynamics and different densities of OI's,
HP's and ground control points GCP's, DFVLR built up the simulation software SAEROS
in a joint effort with University of Hannover. The main work was done and published by
J.Wu (5).
Observation equations of least square fitting in the SAEROS simulation software are given
as follows. Symbols are mostly in accordance with Manual of Photogrammetry, 4th edition,
chapter 2.6.
1.
linearizied collinearity equation for one imaging ray (homologous point j is imaged
between orientation stations i and i + 1):
Vi·
IJ
+ iJ..1] (.AH 1) + jj1J.. Li·J =
E··
1J
(2,1) (2,12) (12,1) (2,3)(3,1) (2,1)
4i : corrections to exterior orientation parameters
Aj : corrections to ground point coordinates
2.
ground control equations for point j:
..
y.J - I A·
=
J
".rO
"".rOO
...t\.; -...t\.;
1
1
(3,1) (3,3)(3,1) (3,1) (3,1)
A;? : approximation of ground coordinates used for linearized equation.
Ar : known
or observed ground coordinates of control point j
1... 1
3.
GauB process model of second order, Markov constant {3 set to unity (orientation stations
i, i + 1, i +2 are then related by this equation):
~
: external orientation parameters of station i
PNi : nominal value of external orientation parameters of station i. Initial approximations
are used as nominal values.
The system of the reduced normal equations is solved by recursive partitioning and Cholesky
factorization.
3. Simulation with SAEROS
3.1 Constant Input Parameters
Up to now all simulations were made in a rectangular coordinate system, excluding the
effects of earth curvature and earth rotation. On the other hand time variations of the input
orientation parameters were always idendical to (5) in accordance with expected satellite
dynamics. Details on orbit and attidude dynamics of the Indian SROSS satellite are given in
(4) and actualized in (1).
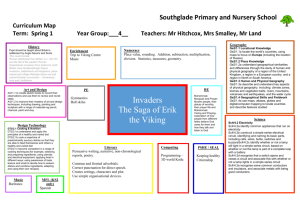
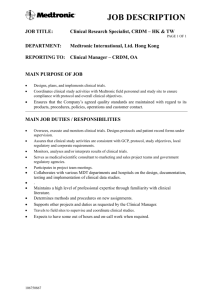
The input profile of the orientation parameters used in all simulation runs is shown in fig.
1.
Simulations of MEOSS image analysis were run as single strip adjustments for a striplength
of 6 baselength over a periodic terrain model, varying only in the along track direction.
Baselength B of MEOSS is 203 km and swath width is 256 km. The adopted terrain model
is a saw-tooth shape model which goes up from 0 m to 3000 m in constant slope inclination
in 40 km distance and goes down to 0 m with the same slope and this shape is repeated.
This terrain is referred as "Mtn. " (mountainous) in Table 2. Completely flat terrain model
was also tested in simulation runs.
We always used a regular grid of 62 by 7 homologous points on ground, that is roughly
10 meshes per baselengh in along track direction. This meshwidth is somewhat coarse to
follow the nutation movement for roll and yaw as can be seen in fig. 1. We never tried less
than 7 HP's per scan line , but perhaps 3 might turn out to be sufficient. Fixed weights for
each observation are listed in Table 1.
We selected second order for the GauB processes, corresponding to constant forces in satellite
dynamics. We did not try different GauB-processes.
1-198
3 .2 Varied Input Parameters
The first simulations with SAEROS run by J. Wu used practically zero weight for the
GauB-processes. Hence convergence had to be forced by additional ground control points and
high weights for the initial values. This is the main reason for differences of our results and
that given in (5). We calculated the standard weight for the GauB process individually for
every orientation parameter from the expected maximal curvatures. We tried three different
weightings for the gauB process by multiplying the unit weights with factors 0.1, 1 and 10.
We used three different levels of noise in image point coordinates 0, 5 and 10 /lm (1 (J level)
corresponding to 0, 0.5 and 1 pixel. However, we applied always the same weights for the
collinearity condition corresponding to 1 a deviation of 10 tlm in the central image strip and
14 /lm in the outer ones.
We varied also the number and distribution of ground control points (GCP's). Total number
of GCP's in the strip was between 3 and 20.
In other simulation runs done before with four baselength, we tried three ratios of intervals
between adjacent orientation stations and along track distances of homologous points. The
ratios were 0.5, 1 and 2.
3.3 Simulation Results
Systematic studies need a quite large number of simulation runs. From the comparatively
small number of simulations specified above we got the results given in Table 2. The
instantaneous field of view IFOV in MEOSS mission is (0.01 0 )2. This corresponds to 10.7
tlm pixel size on focal plane and 73.3 m on ground. These values should be kept in mind
for evaluating the results. The preliminary conclusions are:
•
GauB process of second order effectively leads to rapid convergence of the iterative
adjustment. We never needed more than four iterations with 1 m convergence criterion
for ground coordinates.
•
weighting of the GauB processes seems to be uncritical. Results are rather similar in
spite of relative weight factors 0.1, 1 and 10 .
.,
noise in image space positions is a critical factor as shown by fig. 2 to fig. 9 .
.,
when there is no error in image coordinate, very small number of GCP's leads to
acceptable results as shown in a test case with only 3 GCP's. However, when there is
random errors in image coordinates as in actual case, to increase the number of GCP's
improves the results .
.,
phase distribution of GCP's with regard to baselenth B or nutation period seems to be
uncritical. We tried two runs where we set all GCP's to the same phase with regard to
baselength B and could not detect important changes. (Run number 6 and 7 in Table
1... 199
2.) This can also be seen from the fact that simulation with only 3 GCP's reproduced
the nutation profile of roll and yaw.
•
ratio of orientation interval to distances of adjacent homologous points (along track)
should be at least unity or larger. From the results of earlier simulations not shown in
Table 2 it followed that a ratio of one half leads to a dependency of the adjusted result
on the initial approximations for linearization.
•
Terrain shape
practically no influence on accuracy. This can be explained with the
low ratio of terrain to satellite heights.
From the simulations we conclude that the application of Gaufi processes of second order
as pseudo observations of orientation parameters is an effective tool to stabilize strip
adjustment by homologous points for spaceborne missions of three fold stereoscopic linescan
cameras. Therefore other solutions of the geometry problem, like different tilt angles of the
CCD scanlines in the focal plane - as recommended in (3) - can be avoided.
5. References
(1) Lanzl,F. : "The Three-Line Stereo Camera MEOSS and its Application in Space".-
ISPRS Congress in Kyoto, 1988, this volume.
(2) Ebner,H. and Mueller,F. :"Processing of Digital Three Line Imagary Using a
Generalized Model of Combined Point Determination".- ISPRS Comm.III Symposium
in Rovaniemi, Finnland, 11 pages, 1986.
(3) Hofmmm,O. : "Dynamische Photogrammetrie".- (in German), BuL, Bildmessung
und Luftbildwesen, 3/86, pp. 105-121, 1986.
(4) Drescher,A., Lehner,M. and WU,J. :"A Common Approach to Navigation and
Geometric Image Correction for the Stereoscopic Linescan Camera MEOSS". - ISPRS
Comm.!, Symposium at Stuttgart, FRG, pp.279-284, ESA SP-252), 1986.
(5) WU,J.:"Investigation of Simulated MEOSS-Imagery for Sensor Navigation and
Terrain Derivation".- ISPRS CommJ, Symposium at Stuttgart, FRG, pp.279-284, ESA
SP-252, 1986.
1... 200
TABLE 1. Fixed Wei ghts in the Si mlJl at i on Runs
(Values are given as a priori standard deviations.
We i ghts ar-e i rlver-se IY pl'oport i ona 1 to the squares
of these values.)
25 m
Ground Control Points
Image coordinates, Nadir looking
.
0.01
XO
(I'eferred as 'Nor-mal' in
TABLE 2. )
ZO
0.04 m
0.01 m
0.04 m
1. 29 X1O- 3 rad
5. 14 X1O- 5 rad
1.29XI0-3 rad
YO
(J)
(j)
"
fABLE 2.
Run
a
Results of Simulation Runs
INPUT PARAf'fTERS
Nuober
of GCPs
0.014 mm
• For-ward & Backward looking
Gaussian process,
ITIIH
RESUL TS
Random Wei ghts
Terrain
I:rror for Gaussian Shape
(1 a)
Process
RMSE at check poi nts (meters)
X
Y
l
X. Y.l
RMSE at orientation stations (m and XIO- 5 rad)
-
XO
(J)
¢
JC
25.3
19
12
22
939.1
60.7
205
54
78
653.0
146.2
178
52
81
855.4
150.5
204
46
63
553.7
178.6
141
102
61
lO
YO
--~-
-
1
9
0
Normal
I1tn.
36.4
76.8
44.3
55.3
45.2
2
9
10
Normal
I1tn.
181. 4
227. 7
338.9
257.9
113.9
151. 5
158.5
357. 6
242.2
86.0
4
140. 'I
125.0
341. 7
225.2
222.7
5
156.8
164.0
303.8
218.9
221. 4
3
--
-
29.U
Normal
Mtn.
61.9
82.1
'14.6
73.3
45.1
133.9
74.4
31
15
23
lU
Normal
I1tn.
254.7
l'I8. 1
333. 'f
263.3
110. 0
317. 2
181. 4
90
68
72
20
0
Normal
I1tn.
22.4
39.4
36.6
33.6
4.7
15.9
6.0
12
7
27
20
5
Normal
I1tn.
64.1
58.8
140.6
95.4
42.1
60.8
22.3
24
27
43
56.6
70.7
]53.5
102.9
29.7
273.5
11. 3
67
20
45
31
6
8
7
8
8
9
U
10
'---
II
12
20
10
Normal
I1tn.
41.2
59.1
108.2
75. I
11.5
57. 9
4.0
27
19
102.7
152.0
222.9
166.7
62.5
191.1
46.7
48
32
71
98.2
125.1
240.1
166.3
22.2
374.7
31.2
96
33
61
90.9
lUI. 1
222.9
150.7
100.2
318.6
82.8
74
43
76
90.9
112.5
204.6
144. '{
63.2
193.2
28.4
48
34
69
~
-
13
14
-
15
20
lU
XIO
I1tn.
16
122.8
173.3
249.6
189.2
55.0
26'7. 6
82.9
74
46
86
17
94.9
107.5
241. 1
162.0
14.3
379.4
41.4
97
49
67
103.8
134. 9
273. 2
185.8
31.1
294.7
33.8
78
50
67
80.7
89.6
233.3
151. 6
122.8
281. 1
48.6
71
38
82
68
18
20
10
XO.1
Mtn.
19
--
90.2
130.9
241. 7
167.0
44.4
182.6
66.0
51
45
21
20
0
Normal
Flat
24.3
38.4
41.4
35.5
2.6
11. 2
9.4
12
8
26
22
20
10
Normal
Flat
107.1
128.2
260.2
178.5
94.3
190.U
18.3
60
44
67
20
-
23
3
U
Normal
Mtn.
74.7
51. 9
109.3
82.1
21.4
271. 8
30.8
67
18
32
24
3
10
Normal
Mtn.
196.9
4'/3.7
500.2
413.7
163. I
'/22.6
279.4
156
80
143
1
N
W
•
2.0
:E
0
0.0
x
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
lI(E 4
SCAN LINE
1 .202
lf)
w
• 1.201
:E
1.200
0
>-
0.2
0.4
0.6
0.8
1 .0
1.2
1.4
1.6
1.8
.E4
SCAN LI NE
4.200
lf)
w
II
4.198
:E
0
N
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
llE4
SCAN LI NE
.
~
1.2
w
1.1
Cl
a:
a:::
0.2
0.4
0.6
0.8
a:
w
Cl
1 .0
1.2
1.4
1.6
1.8
.E 4
SCAN LINE
:E
0
N
I
'i' 2.3
~
2.2
0
a:
a:::
~.
0.2
0.4
0.6
:r:
N
I
W
II
-1 .6
~-l .8
0::
CL
D-
1 .0
1.2
1.6
1.8
llE4
0.4
0.6
0.8
1.0
1.2
SCAN LINE
cr:
~
Figure 1.
1 .4
~~
0.2
a:
0.8
SCAN LINE
CL
Variation of orientation parameters used as model input
1... 202
1 .4
1.6
1.8
*E4
~ 3.0
lIE
2.0
~
1.0
0
0 .0
x
0.2
0.4
0.6
0.8
1.0
1.2
1 .4
1.6
1.8
1.2
1.4
1.6
1.8
1.2
1 .4
1.6
1.8
1.2
1 .4
1.6
1.8
1.2
1 .4
1.6
1.8
SCRN LI NE
~ 1.1988
.. 1.1984
~
1 .1980
01.1976
>-
If)
w
4.200
lIE
4.198
L:
- 4.196
o
N
0.2
0.4
0.6
0.8
1.0
SCRN LINE
N
1.3
I
W
lIE
1.2
0.2
0.4
0.6
0.8
1.0
a:
d
SCRN LINE
w
E:
o
- 2.2
Cl
a:
a:::
0.2
0.4
0.6
I
0.8
1.0
SCRN LI NE
a...
;; -I .8
a:
a:::
0.2
a:
a...
a...
a:
0.4
0.6
0.8
1 .0
SCRN LINE
~
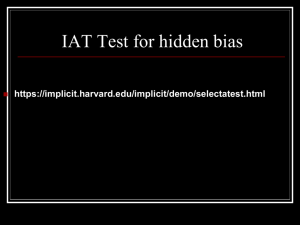
Figure 2.
Adjusted orientation parameters (3 GCP's, no image noise, run No.23)
1. . 203
POSITION ERROR RT GROUND CHECK POINT
Lf)
W
lO!
3.0
V (I k;j
i""'1 ~ (I 'V I r'i ~j (I \j
I r"V \ (k::\ I FI"V ll/I~A (I \j
I ("\) \ (k;\4 (I"V 1 (I
2.0
(1,,\) \
:c
>-
I
1.0
I rlA",1 '1'1<1;;1 (1'14 1 r 11'* 1
I (1-'"" 11"1<1;;1 {1'1", I
1(1\1/1"1",,1 {1<1<t;1
rid,
,,4
I I I I I 1-1
I 141
III
r I I"'f'A
III~ II ffi
II?(I
n I f I l<l
r 1..... 1 (I
r1+4:1 (I
1"1
Y1"V' I'k::\ I t'1'V ll'i~A (I \j I (1\1/1'1<\1 {11-t1 (I""ll (I 1-101111 \ 11'f"f?f 11'1'f'I
11
k:\!\ I~ I (IV Il'i" (I \j I N(;J (1"1,\1 {1'k!;1 (1-k:t:1 (llo4:1111w+11f'1!>t1<1'f"fI
'f \ I'i<;:\ I (I V1 I~ ( I , I r'1 '\! {r'i,,\1 I Vk..k;l II *'tl (I +<0 I t +41114>1 (I ft
\ I kf' l\t l vi ~ 114-y1 ( I , I ~ t:! 1r'i,,\I/I~\ (I~ N""{~ 1~11<f1'"r'i1"'H
1I
0.0
-1.0
-0.2
0.0
0.2
0.4
0.6
1.0
0.8
1.2
1 .4
X (M)
HEIGHT ERROR RT GROUND CHECK POINT
Lf)
W
lO!
3.0
2.0
:c
>-
1.0
0.0
-1 .0
-0.2
0.0
0.2
0.4
X (M)
0.8
0.6
1.0
1.2
1.4
1.0
1.2
1 .4
(Z: PLOTTED SLRNT)
Lf)
W
lO!
4.0
3.0
:c
2.0
1.0
0.0
-1 .0
-0.2
0.0
0.2
X (M)
0.4
DISTRIBUTION. TYPE OF RLL POINTS
GROUND CONTROL PO INT I GCP)
GCP (l ONL Y )
PRSSITIE POINT
Figure 3.
0.8
0.6
C)
X
GC P (X AND YON LY )
GROUND CHECK POINT
Corresponding errors at ground check points (Error vectors enlarged by factor 270)
1. . 204
N
'i' 3.0
2.0
~ 1.0
Cl
0.0
x
0.2
0.4
0.6
0.8
1.0
---r---r----r----r---,----r-----y----r
1 .4
1.6
1.8
1.2
SCRN LINE
~
*E4
1.2015
..
1.2010
~
1.2005
01 .2000
>-
0.2
0.4
0.6
0.8
1.0
1 . <'
1 .4
1. G
SCRN LI NE
LD
1. e
*E4
4 . 2OO
w
*
4.198
:c
0
4.196
N
0.2
0.4
0.6
0.8
1 .0
1.2
1 .4
1.6
SCRN LI NE
1.8
*E4
~ 1.2
w
*
1.1
0
a:
~
0.2
0.4
0.6
0.8
1 .0
1.2
1 .4
1 .6
1.2
1·4
1.6
1.8
a:
0
SCRN LINE
w
:c
0
N
I
'i' 2.3
- 2.2
o
a:
~
0.2
0.4
0.6
0.8
1 .0
SCRN LI NE
N
1.8
*E4
1 .4
I
W
* -1 .6
;; - 1 .8
a:
~
0.2
0.4
0.6
0.8
1.0
1.2
1 .4
a:
tL
tL
SCRN LINE
a:
:x::
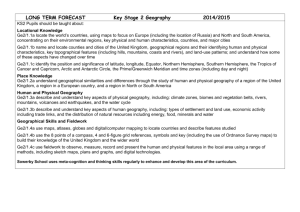
Figure 4.
Adjusted orientation parameters (20 OCP's, no image noise, run No.8)
1. . 205
1.6
1.8
POSITION ERROR RT GROUND CHECK POINT
If)
..
w
3.0
2.0
L
>-
1.0
0.0
-) .0
-0.2
0.2
0.0
0.4
0.6
X
1.0
0.8
1 .2
1 .4
.. E6
(M 1
HEIGHT ERROR RT GROUND CHECK POINT
If)
..
w
3.0
2.0
:E
>-
1 .0
0.0
-1 .0
-0.2
0.2
0.0
0.4
X
0.6
0.8
1.0
1.2
1 .4
.. E6
(Z: PLOTTED SLRNT)
(M)
If)
..
w
4.0
3.0
:E
2.0
1 .0
~
0.0
-1 .0
-0.2
0.2
0.0
X
A
CCl
<!>
Figure 5.
(M)
0.4
0.6
0.8
1.0
1.2
DISTRIBUTION. TYPE OF RLL POINTS
GROUND CONTROL POINT IGCP)
GCP 12 ONLY)
PRSSITIE POlNT
C9
X
1 .4
.. E6
GCP IX RND Y ONL Y )
GROUND CHECK PO I NT
Corresponding errors at ground check points (Error vectors enlarged by factor 460)
1... 206
;::; 4.0
lI(
2.0
~O .0
0
x
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
lI(E4
SCRN Ll NE
lJ)
w
lI( J .202
~ 1 .201
0
>--
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
SCRN Ll NE
1 .8
lIEE4
::3 4.200
)0
4.198
o
4.196
N
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
1 .2
1 .4
1 .6
1 .8
1 .2
1.4
1 .6
1.8
1.2
1 .4
1 .6
1.8
SCRN LINE
~ 1.2
W
lIE
1.1
~ 1.0
0:::
0.2
0.4
0.6
0.8
1.0
a:
c:J
SCRN LINE
W
L
o
0.2
0.4
0.6
:r:
0.8
1 .0
SCRN Ll NE
CL
~ -1.4
w
lIE
1.6
;; -1 .8
a:
0:::
0.2
0.4
0.6
0.8
1 .0
a:
CL
CL
SCRN LINE
a:
:.:::
Figure 6.
Adjusted orientation parameters (20 GCP's, 5 p,m image noise, run No.9)
1-207
POSITION ERROR RT GROUND CHECK POINT
U)
w
"
3·0
,I
II" "d", I 1\ I "
I I)) I \ I k
>--
II
II"
I
I , '" u\ "
~ ·,,{il) kf'111 k(11 ~f'l1111111
2.0
I ( I) I 1'1 I I I I I I k:;1\1 1 l 1
I ""
+++++
I 1 I <f' I I I I 1 I
,h I
::::::: : : : : ; :
(I~ III' Jill l'l''j
~ Iq 4 I)
I" I I I I 'hi 1'1
~ ~ j \ 01 I 1 I r 11 V I I I I I I I l<tl A i I r I I I >;1 11 14 I I I 11). I I j \'1 (1<:\ 1
1.0
1
~ J! I \
t I)
I t I k 1\
I \I r I,
k:~ I I I I 1 I 1 I • 1 1 1 1 I I I I k;.) 1 I 1 1 I 11 i>1
I\ I
kk;ll4f
I
+,t±~:; lr~:: ,:::~: :::::: :::: ':::~:: ,:: '4::: :;~~'
0.0
-1 .0
-0.2
0.0
0.2
0.6
0.4
0.8
1.0
1.2
1 .4
X (M 1
HEIGHT ERROR RT GROUND CH CK POINT
IJ)
w
'"
3.0
2.0
>--
1.0
0.0
-1 .0
-0.2
0.0
0.2
0.6
0.4
0.8
1.0
1.2
1.4
1 .0
1.2
1 .4
(Z: PLOTTED SLRNTl
X (M 1
Lf)
w
•
4.0
3.0
L
2.0
1 .0
0.0
- 1 .0
-0.2
0.0
o.
X (M 1
0.4
(;I!()IINU CrJNTfWl PO [NT
[,1.1' I ! UNL Y J
PASSITIE POlNT
Figure 7.
0.6
0.8
DISTRIBUTION. TYPE OF RLL POINTS
I
ecr)
*E6
GU) (X riND Y ONl Y )
r;ROUNlJ CHeCK PO [NT
Corresponding errors at ground check points (Error vectors enlarged by factor 190)
SCAN LINE
~ 1.202
~
1.200
:;::
1 . 198
0
~
C=::::::=+~
0.2
0.4
0.6
0.8
1.0
1 .2
1 .4
1.6
1.8
~E4
SCAN LI NE
~ 4.200
lI<
4.198
~ 4.196
0
N
0.2
0.4
0.6
0.8
1 .0
1.2
1 .4
1.6
SCAN LI NE
1 .8
-E4
N
~ 1.2
-
1.1
g=! 1 .0
er:
0.2
a:
w
:;::
o
o .4
0.6
Cl
0.8
1.0
1.2
1 .4
1.6
1.2
1 .4
1.6
1.8
SCRN LI NE
0.2
0.4
0.6
I
0.8
1.0
SCAN LI NE
CL
-1 .6
,; -1 .8
a:
vvJ/
r---r.
i
a:::
0.2
0.4
1.8
-E4
0.6
0.8
1 .0
1.2
1 .4
I
1.6
I!
1.8
a:
CL
CL
SCAN LINE
a:
cc
Figure 8.
Adjusted orientation parameters (20 GCP's, 10 p,m image noise, run No.12)
-E4
POSITION ERROR RT GROUND CHECK POINT
Lf)
..
w
3.0
2.0
:L:
0>-
1 .0
0.0
-1 .0
-0.2
0.0
0.2
0.4
0.6
X
0.8
1 .0
1 .2
1.4
.. E6
(M)
HEIGHT ERROR RT GROUND CHECK POINT
In
l.J
"
3.0
~
2.0
<::
0>-
1 .0
\\\,,~,~~\
0.0
I .U
-U.2
(j.0
0.2
0.4
X
0.8
0.6
1.0
1.2
1 .4
.. E6
( Z: PLOTTED SLRNT)
(M)
Lf)
lU
" 4 . (j
3.0
--
:L:
2.0
1 .0
x./'X/)()(X/V>O<XYYYXXI00<:xYYXyyxxXXXXXXJ<X)OOOOO<XY~/XX
U.U
~
-1 . D
-0.2
0.2
0.0
X
(M)
0.4
0.6
0.8
1.0
1 . .2
GROUND CON] ROL PO I NT 1 GCP)
C9
GCP 12 ONLY)
X
GCP 1 X
GROUND
1.4
.. E6
DISTRI8UTION. TYPE OF RLL POINTS
Y ONLY)
PO I NT
PRSSIlIE POINl
Figw-e 9.
Corresponding errors at ground check points (Error vectors enlarged by factor 120)
1-210