ETNA
advertisement

ETNA
Electronic Transactions on Numerical Analysis.
Volume 41, pp. 190-248, 2014.
Copyright 2014, Kent State University.
ISSN 1068-9613.
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SINGULAR INTEGRAL EQUATIONS WITH FIXED
SINGULARITIES OF PARTICULAR MELLIN TYPE∗
PETER JUNGHANNS†, ROBERT KAISER†, AND GIUSEPPE MASTROIANNI‡
Abstract. This paper is concerned with the stability of collocation methods for Cauchy singular integral equations with fixed singularities on the interval [−1, 1]. The operator in these equations is supposed to be of the form
aI + bS + B± with piecewise continuous functions a and b. The operator S is the Cauchy singular integral operator
and B± is a finite sum of integral operators with fixed singularities at the points ±1 of special kind. The collocation methods
search for approximate
solutions of the form ν(x)pn (x) or µ(x)pn (x) with Chebyshev weights
q
q
ν(x) =
1+x
1−x
or µ(x) =
1−x
,
1+x
respectively, and collocation with respect to Chebyshev nodes of first and third
or fourth kind is considered. For the stability of collocation methods in a weighted L2 -space, we derive necessary
and sufficient conditions.
Key words. collocation method, stability, C ∗ -algebra, notched half plane problem
AMS subject classifications. 65R20, 45E05
1. Introduction. Polynomial collocation methods for singular integral equations with
fixed singularities are studied, for example, in [1, 11, 17]. In [11], the stability of a polynomial collocation method is investigated for a class of Cauchy singular integral equations
with additional fixed singularities of Mellin convolution type. The papers [1, 17] are more
concerned with the computational aspects of these methods. While [17] deals with integral
equations of the form
Z 1 Z 1
1 + x u(y) dy
h
u(x) + b(x)
h0 (x, y)u(y) dy = f (x), −1 < x < 1,
+
1+y
1+y
−1
−1
where h : (0, ∞) −→ C, b, f : [−1, 1] −→ C, and h0 : [−1, 1]2 −→ C are given (continuous) functions, the paper [1] deals with the effective realization of polynomial collocation
methods for the equation (see [1, (1.8)])
Z 1 1
1
1
6(1 + x)
4(1 + x)2
u(y) dy = f (x),
−
+
−
π −1 y − x 2 + y + x (2 + y + x)2
(2 + y + x)3
(1.1)
− 1 < x < 1,
associated with the so-called notched half plane problem; see also [14, Section 37a] and
[2, Section 14]; we also refer to [1, Remark 2.6]. In particular, if the right-hand side f (x)
1
of (1.1) is a constant function, then the solution u(x) has a singularity√
of the form (1−x)− 2 at
the endpoint 1 of the integration interval. More detailed, the function 1 − x u(x) is bounded
and satisfies certain smoothness properties; cf. [2, Theorem 14.1]. In [11], singularities of the
solutions are considered which can be represented by a Jacobi weight the exponents of which
are in the interval (− 41 , 43 ). Hence, the stability results given in [11] are not applicable to the
1
equation (1.1) if we want to represent the asymptotic behaviour (1 − x)− 2 of the solution at
the right endpoint of the integration interval.
∗ Received April 14, 2014. Accepted June 5, 2014. Published online on August 1, 2014. Recommended by
L. Reichel.
† Department of Mathematics, Chemnitz University of Technology, Reichenhainer Str. 39, D-09126 Chemnitz,
Germany ({peter.junghanns,robert.kaiser}@mathematik.tu-chemnitz.de).
‡ Dipartimento di Matematica, Università della Basilicata, Via dell’Ateneo Lucano, 85100 Potenza, Italy
(mastroianni.csafta@unibas.it).
190
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
191
In the present paper, we investigate the stability of collocation methods applied to a class
of Cauchy singular integral equations with additional fixed singularities of Mellin type (of
special form) covering equation (1.1) of the notched half plane problem, where the solution u(x) can be represented in the form
r
r
1+x
1−x
(1.2)
u(x) =
u0 (x)
or
u(x) =
u0 (x)
1−x
1+x
with sufficiently regular functions u0 (x). Of course, for the problem (1.1), this asymptotic
behavior is not the best one, and further investigations are necessary. Let us also mention that
other exponents in the weights are of interest depending on the concrete problem; see, for
example, [2, Theorem 15.1] or [5, Section 2]. In [11], the stability of the collocation methods
is proved by using respective results for Cauchy singular integral equations (cf. [12, 13]) and
a representation of the Mellin operators by Bochner integrals. Since the kernels of Mellin
operators under consideration in the present paper do not satisfy all assumptions made in [11],
we develop here necessary and sufficient conditions for the stability of these methods in a
more direct manner taking advantage of the special structure of the Mellin kernels occurring
for example in (1.1).
The paper is organized as follows. In Section 2 we introduce the class of integral equations under consideration and describe the polynomial collocation methods we want to apply.
In Section 3.1 an algebra of operator sequences is defined for which the stability of these operator sequences is equivalent to its invertibility modulo a suitable ideal and the invertibility of
four limit operators associated to the operator sequence. The fact that the operator sequences
of our collocation methods belong to this algebra is the topic of Section 3.2, where also the
respective four limit operators are presented. Section 3.3 discusses the invertibility of these
limit operators and prepares the proof of the main result on the stability of the collocation
methods, which is presented in Section 4. Section 5 shows how to deal with the first type of
singularities in (1.2) since the previous results are concerned with the second type in (1.2).
In Section 6 we discuss some numerical aspects of the investigated collocation methods and
present numerical results for their application to the notched half plane problem (1.1) together
with a discussion of the numerical results already presented in [1]. The final Sections 7 and 8
give the technical proofs for the results of Section 3.2 and of Lemma 4.8, respectively.
2. The integral equation and a collocation method. Here we consider the Cauchy
singular integral equation with fixed singularities of the form
Z
m− − Z 1
X
βk
(1 + x)k−1 u(y) dy
b(x) 1 u(y)
dy +
a(x)u(x) +
πi −1 y − x
πi −1
(y + x + 2)k
k=1
(2.1)
m+ + Z 1
X
βk
(1 − x)k−1 u(y) dy
= f (x), −1 < x < 1,
+
πi −1
(y + x − 2)k
k=1
with given βk± ∈ C and nonnegative integers m± . In this equation, the coefficient functions a, b belong to the set PC of piecewise continuous functions1 , the right-hand side function f is assumed to belong to the weighted L2 -space L2ν , and u ∈ L2ν stands for the unknown
solution. The inner product in the Hilbert space L2ν is given by
Z 1
u(y)v(y)ν(y) dy,
hu, viν :=
−1
1 We call a function a : [−1, 1] → C piecewise continuous if it is continuous at ±1 , if the one-sided limits
a(x ± 0) exist for all x ∈ (−1, 1), and at least one of them coincides with a(x) .
ETNA
Kent State University
http://etna.math.kent.edu
192
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
where ν(x) =
q
1+x
1−x
is the Chebyshev weight of third kind. Let
S : L2ν → L2ν ,
be the Cauchy singular integral operator, aI :
plication by a, and
Bk± : L2ν −→ L2ν , u 7→
L2ν
1
πi
Z
1
πi
u 7→
Z
1
−1
u(y)
dy
y−·
→ L2ν , u 7→ au be the operator of multi1
−1
(1 ∓ ·)k−1 u(y) dy
(y + · ∓ 2)k
be the integral operators with a fixed singularity at ±1. We write equation (2.1) in the form
!
m+
m−
X
X
+ +
− −
βk Bk u = f.
βk B k +
Au := aI + bS +
k=1
k=1
It is a well known fact that the single operators aI, S, and Bk± are bounded in L2ν ;
see [2, Theorem 1.16 and Remark 8.3]. This means that these operators belong to the Banach
algebra L(L2ν ) of all bounded and linear operators A : L2ν −→ L2ν . In order to get approximate solutions of the integral equation, we use a polynomial collocation method. For
q this
√
1
1−x
2 , and µ(x) =
we need some further notions. Let σ(x) = √1−x
1
−
x
,
ϕ(x)
=
2
1+x
be the Chebyshev weights of first, second, and fourth kind, respectively. For n ≥ 0 and
τ ∈ {σ, ϕ, ν, µ}, we denote by pτn (x) the corresponding normalized Chebychev polynomials
of degree n with respect to the weight τ (x) and with positive leading coefficient, which we
ν
µ
abbreviate by Tn (x) = pσn (x), Un (x) = pϕ
n (x), Rn (x) = pn (x), and Pn (x) = pn (x). We
know that
r
1
2
cos ns, n ≥ 1, s ∈ (0, π),
T0 (x) = √ , Tn (cos s) =
π
π
and, for n ≥ 0 , s ∈ (0, π) ,
√
2 sin(n + 1)s
√
,
Un (cos s) =
π sin s
Rn (cos s) =
cos(n + 12 )s
√
,
π cos 2s
Pn (cos s) =
sin(n + 21 )s
√
.
π sin 2s
The zeros xτjn of pτn (x) are given by
xσjn = cos
j − 21
π,
n
xϕ
jn = cos
jπ
,
n+1
xνjn = cos
j − 12
π,
n + 21
xµjn = cos
jπ
,
n + 21
for j = 1, · · · , n. We introduce the Lagrange interpolation operator Lτn defined for every
function f : (−1, 1) → C by
Lτn f =
n
X
f (xτjn )ℓτjn ,
ℓτjn (x) =
j=1
pτn (x)
=
(x − xτjn )(pτn )′ (xτjn )
We remark that the respective Christoffel numbers λτjn =
λσjn
π
= ,
n
λϕ
jn
2
π 1 − (xϕ
jn )
=
,
n+1
λνjn
=
Z
k=1,k6=j
x − xτkn
.
xτjn − xτkn
1
−1
ℓτjn (x)τ (x) dx are equal to
π(1 + xνjn )
n+
n
Y
1
2
,
λµjn
=
π(1 − xµjn )
n+
1
2
.
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
193
The collocation method seeks an approximation un ∈ L2ν of the form
un (x) = µ(x)pn (x),
(2.2)
pn ∈ Pn ,
to the exact solution of Au = f by solving
(2.3)
(Aun )(xτkn ) = f (xτkn ),
k = 1, 2, . . . , n,
where Pn denotes the set of all algebraic polynomials of degree less than n ∈ N. We set
Using the Lagrange basis
pen (x) := µ(x)Pn (x),
µ(x)ℓτkn (x)
ℓeτkn (x) =
,
µ(xτkn )
n = 0, 1, 2, . . .
k = 1, . . . , n,
in µPn , we can write un as
un =
n−1
X
j=0
If we introduce the Fourier projections
αjn pej =
Ln : L2ν → L2ν ,
u 7→
n
X
k=1
ξkn ℓeτkn .
n−1
X
j=0
hu, pej iν pej
and the weighted interpolation operators Mτn := µLτn µ−1 I, then the collocation system (2.3)
can be written as an operator equation
(2.4)
Aτn := Mτn ALn un = Mτn f,
un ∈ im Ln ,
where im denotes the range of an operator. For the relation between the approximate solution
and the exact solution, we have to investigate the stability of the collocation method. We
τ
call the collocation method stable if the approximation
τ −1 operators An are invertible for all
sufficiently large n ∈ N and if the norms (An ) Ln L(L2 ) are uniformly bounded. If the
ν
collocation method is stable, then the strong convergence of Aτn Ln to A ∈ L(L2ν ) as well as
the convergence Mτn f −→ f in L2ν imply the convergence of the approximations un to the
exact solution u in L2ν . This can be seen from the estimate
kLn u − un kν = A−1
n Ln (An Ln u − An un ) ν
−1 ≤ An Ln 2 (kAn Ln u − Auk + kf − Mτn f k ) ,
L(Lν )
ν
ν
which also shows that, for getting convergence rates, one has to estimate the errors Ln u − u
and An Ln u − Au with the solution u and the error Mτn f − f with the right-hand side f .
The technique, which we use to prove stability, includes the proof of strong convergence
Aτn Ln −→ A; cf. the definition of the algebra F in Section 3.1. For Mτn f −→ f, see
Lemma 7.2. But the focus of the present paper is the stability of the methods under consideration. Proving convergence rates by using certain smoothness properties of the right-hand
side f and of the solution u is a further task; cf., for example, [17, Section 5]. The main
result of our paper on the stability of the collocation methods (2.4) applied to the integral
equation (2.1) is given in Theorem 4.11.
Of course, by making the ansatz (2.2), we are only concerned with the second representation of the solution in (1.2). How to use the corresponding results for the other representation
in (1.2) is shown in Section 5.
ETNA
Kent State University
http://etna.math.kent.edu
194
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
3. The stability of the collocation methods.
3.1. The Banach algebra framework for the stability of operator sequences. In what
follows, the operator sequence, for which we want to prove stability, is considered as an
element of a Banach algebra. For the definition of this algebra, we need some spaces as
well as some useful operators. By ℓ2 we denote the Hilbert space of all square summable
∞
sequences ξ = (ξj )j=0 , ξj ∈ C, with the inner product
hξ, ηi =
∞
X
ξj η j .
j=0
Additionally, we define the following operators
Wn : L2ν −→ L2ν ,
u 7→
Pn : ℓ2 −→ ℓ2 ,
n−1
X
j=0
hu, pen−1−j iν pej ,
∞
(ξj )j=0
7→ (ξ0 , · · · , ξn−1 , 0, . . . ) ,
and, for τ ∈ {σ, µ},
p
p
u 7→ ωnτ 1 + xτ1n u(xτ1n ), . . . , ωnτ 1 + xτnn u(xτnn ), 0, . . . ,
p
p
e τ : im Ln −→ im Pn , u 7→ ω τ 1 + xτ u(xτ ), . . . , ω τ 1 + xτ u(xτ ), 0, . . . ,
V
nn
nn
n
n
n
1n
1n
q
p
π
where ωnσ = nπ and ωnµ = n+
1 . Let T = {1, 2, 3, 4} and set
Vnτ : im Ln −→ im Pn ,
2
X(1) = X(2) = L2ν ,
X(3) = X(4) = ℓ2 ,
(t)
(t)
(2)
L(1)
n = Ln = Ln ,
(t)
and define En : im Ln −→ Xn := im Ln for t ∈ T by
En(1) = Ln ,
(4)
L(3)
n = Ln = P n ,
En(2) = Wn ,
En(3) = Vnτ ,
enτ .
En(4) = V
Here and at other places, we use the notion Ln , Wn , . . . instead of Ln |im Ln , Wn |im Ln , . . . ,
(t)
respectively. All operators En , t ∈ T , are invertible with inverses
−1
−1
−1
−1
−1
−1
= (Venτ ) ,
= (Vnτ ) ,
En(4)
= En(2) ,
En(3)
= En(1) ,
En(2)
En(1)
where, for ξ ∈ im Pn ,
(Vnτ )
−1
ξ = (ωnτ )−1
(Venτ )
−1
ξ = (ωnτ )−1
and
n
X
1
p
ξk−1 ℓeτkn
τ
1
+
x
kn
k=1
n
X
1
p
ξn−k ℓeτkn .
τ
1
+
x
kn
k=1
Now we can introduce the algebra of operator sequences we are interested in. By F we denote
the set of all sequences (An )∞
n=1 =: (An ) of linear operators An : im Ln −→ im Ln for
which the strong limits
−1
L(t)
t ∈ T,
W t (An ) := lim En(t) An En(t)
n ,
n→∞
∗
−1
∗
L(t)
W t (An ) = lim En(t) An En(t)
,
t ∈ T,
n
n→∞
ETNA
Kent State University
http://etna.math.kent.edu
195
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
exist. If we provide F with the supremum norm k(An )kF := supn≥1 kAn Ln kL(L2ν ) and with
operations (An ) + (Bn ) := (An + Bn ), (An )(Bn ) := (An Bn ) and (An )∗ := (A∗n ), one
can easily check that F becomes a C ∗ -algebra with the identity element (Ln ). Moreover, we
introduce the set J ⊂ F of all sequences of the form
!
4 −1
X
(t)
(t)
(t)
Ln T t E n + C n ,
En
t=1
where the linear operators Tt : X(t) −→ X(t) are compact and kCn Ln kL(L2 ) −→ 0
ν
as n → ∞.
P ROPOSITION 3.1 (Lemma 2.1 in [10], Theorem 10.33 in [18, 19]). The set J forms a
two-sided closed ideal in the C ∗ -algebra F. Moreover, a sequence (An ) ∈ F is stable if and
only if the operators W t (An ) : X(t) → X(t) , t ∈ T, and the coset (An ) + J ∈ F/J are
invertible.
3.2. The collocation sequence as an element of the Banach algebra F. For the investigation of the stability of the collocation method (Aτn ) = (Mτn ALn ), we have to show that
this sequence belongs to the algebra F, which means to prove the existence of the four limit
operators W t (An ). Regarding the multiplication operator aI as well as the Cauchy singular
integral operator S, Proposition 3.2 below was proved in [10]. To describe the respective
limit operators we need some further notation. Define the isometries
(3.1)
J1 : L2ν → L2ν ,
u 7→
J2 : L2ν → L2ν ,
u 7→
J3 : L2ν → L2ν ,
V:
L2ν
→
L2ν ,
j=0
∞
X
j=0
u 7→
∞
X
u 7→
∞
X
and the shift operator
(3.2)
∞
X
hu, pej iν Rj ,
√
hu, pej iν 1 − x Uj ,
1
Tj ,
hu, pej iν √
1
+x
j=0
j=0
hu, pej iν pej+1 .
The adjoint operators J1∗ , J2∗ , J3∗ , V ∗ : L2ν → L2ν are given by
J1∗ u = J1−1 u =
∞
X
j=0
and
J3∗ u = J3−1 u =
∞ X
j=0
J2∗ u = J2−1 u =
hu, Rj iν pej ,
u, √
1
Tj
1+x
ν
pej ,
V ∗u =
∞
X
j=0
∞
X
u,
√
j=0
hu, pej+1 iν pej .
1 − x Uj
ν
pej
2
2
e τ 2
Finally, we denote by I = [δjk ]∞
j,k=0 the identity in ℓ and by S, S : ℓ −→ ℓ the operators
defined by
∞
j−k
1 − (−1)j+k+1
e = 1 − (−1)
S
+
πi(j − k)
πi(j + k + 1) j,k=0
ETNA
Kent State University
http://etna.math.kent.edu
196
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
and
∞
1 − (−1)j+k+1
1 − (−1)j−k
−
πi(j − k)
πi(j + k + 1) j,k=0
τ
S =
∞
1
1
1 − (−1)j−k
−
πi
j−k j+k+2
j,k=0
: τ = σ,
: τ = µ.
The following proposition is already known.
P ROPOSITION 3.2 (Proposition 3.5 in [10]). Let a, b ∈ PC, A = aI + bS, and
Aτn = Mτn ALn . Then, for τ ∈ {σ, µ}, we have (Aτn ) ∈ F and
J1−1 (aJ1 + ibI)
W 1 (Aτn ) = A,
W 2 (Aτn ) =
W 3 (Aτn ) = a(1)I + b(1)Sτ ,
e
W 4 (Aτn ) = a(−1)I − b(−1)S.
J −1 (aJ − ibJ V)
2
3
2
: τ = σ,
: τ = µ,
R EMARK 3.3. We have to mention that in [10, p. 745, line 13] there is a sign error. One
has
"
# n−1
"
# n−1
1 − (−1)j+k+1
1 − (−1)j−k
−
π
+
π
2in sin j−k
2in sin j+k+1
2n
2n
j,k=0
instead of
1 − (−1)j−k
1 − (−1)j+k+1
−
π
−
π
2in sin j−k
2in sin j+k+1
2n
2n
.
j,k=0
e and not to W 4 (An ) = a(−1)I − b(−1)Sσ as
This leads to W 4 (Aσn ) = a(−1)I − b(−1)S
formulated in [10, Proposition 3.5].
Having in mind Proposition 3.2, our next aim is to show that the sequences Mτn Bk± Ln ,
k ∈ N, belong to F and to determine their limit operators W j Mτn Bk± Ln . As a result, we
can state the following proposition, the proof of which is given in Section 7.
m+
m−
X
X
− −
βk+ Bk+ , and
P ROPOSITION 3.4. Let a, b ∈ PC, A = aI + bS +
βk B k +
k=1
Aτn = Mτn ALn . Then, for τ ∈ {σ, µ}, we have (Aτn ) ∈ F and
W 1 (Aτn ) = A,
(
W 2 (Aτn ) =
J1−1 (aJ1 + ibI)
J2−1 (aJ2
− ibJ3 V)
: τ = σ,
: τ = µ,
W 3 (Aτn ) = a(1)I + b(1)Sτ + Aτ + Kτ ,
e + A + K,
W 4 (Aτ ) = a(−1)I − b(−1)S
n
k=1
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
197
where the operators A, Aτ ∈ L(ℓ2 ) are defined as
∞
j + 21
,
A=
(k + 12 )2 j,k=0
k0 =1
∞
m+
X
(j + 21 )2
1
+
+
σ
βk0 2 h k0
A =
,
(k + 21 )2 k + 21 j,k=0
k0 =1
∞
m+
X
(j + 1)2
1
+
µ
+
A =
βk0 2 h k0
,
(k + 1)2 k + 1 j,k=0
k =1
m−
X
(3.3)
(3.4)
(3.5)
βk−0
2 h−
k0
(j + 21 )2
(k + 21 )2
0
with
h±
k (x) =
(3.6)
(∓1)k xk−1
,
πi (1 + x)k
x ∈ (0, ∞), k ∈ N,
and where K, Kτ : ℓ2 −→ ℓ2 are compact operators.
3.3. The invertibility of the limit operators. In this section we consider the invertibility of the four limit operators. Due to Proposition 3.1, this is necessary for the stability
of the collocation method. Thus, our main concern is devoted to necessary and sufficient
conditions for the invertibility of these limit operators. At first we consider the operator
m
P+ + +
P− − − m
βk Bk . For this, we need the Mellin transform
βk B k +
A = aI + bS +
k=1
k=1
yb(z) :=
Z
∞
y(x)xz−1 dx
0
of a function y : (0, ∞) → C. With the help of the continuous functions h±
k : (0, ∞) −→ C
defined in (3.6), we can write the linear combination of the integral operators Bk± in (2.1) in
the form
(3.7)
m−
X
βk− (Bk− u)(x) +
k=1
=
m−
X
k=1
βk−
Z
m+
X
βk+ (Bk+ u)(x)
k=1
1
−1
h−
k
1+x
1+y
m+
X
u(y)
dy +
βk+
1+y
k=1
Z
1
−1
h+
k
1−x
1−y
u(y)
dy.
1−y
kb
b±
For h±
k (x), k ∈ N, the Mellin transform is given by hk (z) = (∓1) hk (z + k − 1) with
k
hk (x) = (1 + x) , and (see, for example, [4, 6.2.(6)])
π
b k (z) = (−1)k−1 z − 1
h
k − 1 sin(πz)
is holomorphic in the strip 0 < Re z < k. This implies
(∓1)k
b ± (β − it) = β − it + k − 2
h
,
k
sinh(π(iβ + t))
k−1
1 − k < β < 1, t ∈ R.
b ± (β − it) is analytic in the strip 0 < β < 1 for all k ∈ N. Due to (3.7) and
We remark that h
k
by [2, Theorem 9.1] (cf. also [3, 7, 8, 16]), we can state the following proposition.
ETNA
Kent State University
http://etna.math.kent.edu
198
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
P ROPOSITION 3.5. Let a, b ∈ PC, A = aI +bS +
m−
X
k=1
βk− Bk− +
m+
X
k=1
βk+ Bk+ : L2ν −→ L2ν .
(a) The operator A is Fredholm if and only if:
• For any x ∈ (−1, 1), there holds a(x ± 0) + b(x ± 0) 6= 0 and
a(x ± 0) − b(x ± 0) 6= 0 as well as a(±1) + b(±1)
6=
0 and
a(±1) − b(±1) 6= 0.
• If a or b has a jump at x ∈ (−1, 1), then there holds
λ
a(x − 0) + b(x − 0)
a(x + 0) + b(x + 0)
+ (1 − λ)
6= 0,
a(x + 0) − b(x + 0)
a(x − 0) − b(x − 0)
0 ≤ λ ≤ 1.
• For x = ±1, there holds
m
a(1) + b(1)i cot
π
4
+
X
b + ( 1 − iξ) 6= 0,
− iπξ +
βk+ h
k 4
k=1
and
− ∞ < ξ < ∞,
m
a(−1) + b(−1)i cot
π
4
−
X
b − ( 3 − iξ) 6= 0,
+ iπξ +
βk− h
k 4
k=1
− ∞ < ξ < ∞.
(b) If A is Fredholm and if the coefficients a and b have finitely many jumps, then the
Fredholm index of A : L2ν −→ L2ν is equal to minus the winding number of the
′
′
closed continuous curve ΓA := Γ− ∪ Γ1 ∪ Γ1 ∪ . . . ∪ ΓN ∪ ΓN ∪ ΓN +1 ∪ Γ+
with the orientation given by the subsequent parametrization. Here, N stands for
the number of discontinuity points xi , i = 1, . . . , N, of the functions a and b chosen
such that x0 := −1 < x1 < · · · < xN < xN +1 := 1. Using these xi , the curves
′
Γi , i = 1, . . . , N + 1, and Γi , i = 1, . . . , N, are given by
Γi :=
′
Γi :=
a(y) + b(y)
: xi−1 < y < xi ,
a(y) − b(y)
a(xi − 0) + b(xi − 0)
a(xi + 0) + b(xi + 0)
+ (1 − λ)
: 0≤λ≤1 .
λ
a(xi + 0) − b(xi + 0)
a(xi − 0) − b(xi − 0)
The curves Γ± , connecting the point 1 with one of the end points of Γ1 and ΓN +1 ,
are given by the formulas
)
(
Pm + + + 1
b ( − iξ)
a(1) + b(1)i cot π4 − iπξ + k=1
βk h
k 4
: −∞ ≤ ξ ≤ ∞
Γ+ :=
a(1) − b(1)
and
Γ− :=
(
a(−1) + b(−1)i cot
Pm − − − 3
b ( − iξ)
βk h
+ iπξ + k=1
k 4
:
a(−1) − b(−1)
π
4
)
−∞≤ξ ≤∞ .
(c) If A is Fredholm and if m− = 0 or m+ = 0, then A is one-sided invertible.
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
199
0
−0.5
imag
−1
−1.5
−2
−2.5
−3
−2
−1.5
−1
F IG . 3.1.
nP
−0.5
3
k=1
b−
h
k
0
real
3
4
0.5
1
1.5
2
o
− iξ : −∞ ≤ ξ ≤ ∞ .
1.2
1
imag
0.8
0.6
0.4
0.2
0
−0.8
−0.6
F IG . 3.2.
−0.4
nP
−0.2
3
k=1
b+
h
k
0
real
1
4
0.2
0.4
0.6
0.8
o
− iξ : −∞ ≤ ξ ≤ ∞ .
Let z1 , z2 ∈ C. We denote by γℓ/r [z1 , z2 ] the half circle line from z1 to z2 lying on
the left, respectively, on the right of the segment [z1 , z2 ] and by γ[z1 , z2 ] the circle line with
diameter [z1 , z2 ] starting in z1 with clockwise orientation. For given functions a, b ∈ PC
with a(x ± 0) − b(x ± 0) 6= 0, x ∈ [−1, 1], we define
(3.8)
c(x) :=
a(x) + b(x)
.
a(x) − b(x)
ETNA
Kent State University
http://etna.math.kent.edu
200
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
0
−0.5
−1
−1.5
imag
−2
−2.5
−3
−3.5
−4
−2
−1
0
real
1
2
F IG . 3.3. Γ− in case of a(−1) = 0, m− = 3, βk− = 1.
0.8
0.6
0.4
imag
0.2
0
−0.2
−0.4
−0.6
−1
−0.5
0
real
0.5
1
F IG . 3.4. Γ+ in case of a(1) = 0, m+ = 3, βk+ = 1.
The equalities
(
(3.9)
a(1) + b(1)i cot π4 − iπξ
a(1) − b(1)
a(−1) + b(−1)i cot π4 + iπξ
a(−1) − b(−1)
)
= γr [c(1), 1].
)
= γℓ [1, c(−1)]
: −∞ ≤ ξ ≤ ∞
and
(3.10)
(
: −∞ ≤ ξ ≤ ∞
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
201
can easily be shown. The curve Γ+ is a modified arc from c(1) to 1 and the curve Γ− is
a modified arc from 1 to c(−1). For instance, Figures 3.1 and 3.2 display the images of
P3 b ± 3
±
k=1 hk 4 − iξ (i.e., m± = 3, βk = 1) and Figures 3.3 and 3.4 the respective curves Γ±
in the case a(±1) = 0.
The above proposition enables us to give conditions for the invertibility of the second
limit operator W 2 . So we derive from [10, Lemma 4.4 and Corollary 4.5].
L EMMA 3.6. Let Aτn = Mτn (aI + bS)Ln , τ ∈ {σ, µ}.
(a) The operator W 2 (Aσn ) is invertible in L2ν if and only if A = aI + bS has this
property.
(b) If aI + bS : L2ν −→ L2ν is invertible, then the invertibility of W 2 (Aµn ) : L2ν −→ L2ν
is equivalent to the condition |a(1)| > |b(1)|, which is again equivalent to the condition Re c(1) > 0.
For the index calculation of the second limit operator, we can state the following lemma.
L EMMA 3.7. Let a, b ∈ PC, τ ∈ {σ, µ}, and A := aI + bS : L2ν → L2ν , as well as
τ
An := Mτn ALn . If A is Fredholm, then the second limit operator W 2 (Aσn ) : L2ν → L2ν is
also Fredholm, where
(3.11)
ind W 2 (Aσn ) = − ind A.
If A, W 2 (Aµn ) : L2ν −→ L2ν are Fredholm, then
− ind A
: Re c(1) > 0 ,
2
µ
(3.12)
ind W (An ) =
− ind A − 1 : Re c(1) < 0 .
Proof. Let ind A = κ . For λ ∈ [0, 1], define
c(x − 0)(1 − λ) + c(x + 0)λ
c(1) + [1 − c(1)]f− 21 (λ)
(3.13)
c(x, λ) =
1 + [c(−1) − 1]f 1 (λ)
2
: x ∈ (−1, 1),
: x = +1,
: x = −1,
sin παλ −iπα(λ−1)
e
and c(x) is defined in (3.8). Note that, for z1 , z2 ∈ C,
sin πα
the image of the function z1 + (z2 − z1 )fα (λ), λ ∈ [0, 1], describes the circular arc from
z1 to z2 such that the straight line segment [z1 , z2 ] is seen from the points of the arc under
the angle π(1 + α), i.e., in case α ∈ (−1, 0), the arc lies on the right of the segment [z1 , z2 ]
and, in case α ∈ (0, 1), on the left. By (3.9), (3.10), and Proposition 3.5, it follows that
ΓA = {c(x, λ) : (x, λ) ∈ [−1, 1] × [0, 1]}. Moreover, we denote the winding number of this
curve with respect to the origin of the complex plane by wind c(x, λ). Due to the fact that
every piecewise continuous function can be approximated by a function with finitely many
jumps, we can assume that −1 < x1 < · · · < xN < 1 are the only discontinuities of c(x).
1
Define the piecewise continuous argument function α(x) = 2π
arg c(x) in such a way that
1
3 1
.
(3.14) |α(xk + 0) − α(xk − 0)| < , k = 1, . . . , N,
and α(−1) ∈ − ,
2
4 4
where fα (λ) =
For the winding number, we derive
(3.15)
1
3
wind c(x, λ) ∈ Z ∩ α(1) − , α(1) +
.
4
4
Due to Proposition 3.5, we have κ = − wind c(x, λ).
ETNA
Kent State University
http://etna.math.kent.edu
202
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
b(x) − a(x)
and define d(x, λ) analogously to (3.13). Then
b(x) + a(x)
(cf. the proof of [10, Lemma 4.4]), d(x, λ) 6= 0, ∀ (x, λ) ∈ [−1, 1] × [0, 1], if and only if
c(x, λ) 6= 0, ∀ (x, λ) ∈ [−1, 1] × [0, 1]. Define the piecewise continuous argument function
1
arg d(x) satisfying the respective conditions (3.14). Since (cf. again the proof of
β(x) = 2π
[10, Lemma 4.4])
In case τ = σ, set d(x) =
ind W 2 (Aσn ) = ind (bI − aS)
1
β(x) = − − α(x),
2
and
we have
−ind W
2
(Aσn )
1
3
= wind d(x, λ) ∈ Z ∩ − − α(1), − α(1) ,
4
4
proving, together with (3.15), the relation (3.11).
Let us turn to the case τ = µ, and assume that W 2 (Aµn ) : L2ν −→ L2ν is Fredholm. From
the proof of [10, Lemma 4.5], we have
1
3
− ind W 2 (Aµn ) ∈ Z ∩ −α(1) − , −α(1) +
.
4
4
In view of (3.15), we get κ ∈ −α(1) − 41 , −α(1) +
α(1) −
3
4
if and only if
1
1
< wind c(x, µ) < α(1) + ,
4
4
which is equivalent to Re c(1) > 0 . Analogously, κ + 1 ∈ −α(1) − 14 , −α(1) + 43 if and
only if α(1) + 14 < wind c(x, µ) < α(1) + 43 , i.e., Re c(1) < 0 .
Observe that the Fredholmness of the operator A := aI +bS : L2ν → L2ν implies that the
half circle line γr [c(1), 1] does not contain 0, which implies c(1) 6∈ {iy : y ≥ 0}. Moreover,
by the Fredholmness of (cf. [10, (4.4)])
√
√
√
1 √
W 2 (Aµn ) = J2−1 √
a( 1 + x + ib 1 − x − ia 1 − x + b 1 + x S ,
2
h
i
1
we get 0 6∈ γr c(1)
, 1 , i.e., c(1) 6∈ {iy : y ≤ 0}. Hence, (3.12) is proved.
We also need conditions for the Fredholmness of the operators W 3/4 (Aτn ). For that, we
consider the C ∗ -algebra L(ℓ2 ) of all linear and continuous operators in ℓ2 . By alg
T (PC)
∞we
denote the smallest C ∗ -subalgebra of L(ℓ2 ) generated by the Toeplitz matrices gbj−k j,k=0
P
with piecewise continuous generating functions g(t) := ℓ∈Z gbℓ tℓ defined on the unit circle
T := {t ∈ C : |t| = 1} and being continuous on T \ {±1}.
P ROPOSITION 3.8 (Theorem 16.2 in [15]). There exists a (continuous) map smb from
alg T (PC) into a set of complex valued functions defined on T × [0, 1], which sends each
R ∈ alg T (PC) to the function smbR (t, λ), which is called symbol of R and which satisfies
the following properties:
(a) For each fixed (t, λ) ∈ T × [0, 1], the map alg T (PC) −→ C, R 7→ smbR (t, λ) is
a multiplicative linear functional on alg T (PC).
(b) For any t 6= ±1, the value smbR (t, λ) is independent of λ, and the function
t 7→ smbR (t, 0) is continuous on {t ∈ T : Im t > 0} and on {t ∈ T : Im t < 0}
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
203
with the limits
smbR (1 + 0, 0) :=
smbR (1 − 0, 0) :=
smbR (−1 + 0, 0) :=
smbR (−1 − 0, 0) :=
lim
smbR (t, 0) = smbR (1, 1),
lim
smbR (t, 0) = smbR (1, 0),
lim
smbR (t, 0) = smbR (−1, 1),
lim
smbR (t, 0) = smbR (−1, 0).
t→+1,Im t>0
t→+1,Im t<0
t→−1,Im t<0
t→−1,Im t>0
(c) An operator R ∈ alg T (PC) is Fredholm if and only if smbR (t, λ) 6= 0 for all
(t, λ) ∈ T × [0, 1].
(d) For any Fredholm operator R ∈ alg T (PC), the index of R is the negative winding
number of the closed curve
(3.16)
ΓR : = {smbR (eis , 0) : 0 < s < π} ∪ {smbR (−1, s) : 0 ≤ s ≤ 1}
∪ {smbR (−eis , 0) : 0 < s < π} ∪ {smbR (1, s) : 0 ≤ s ≤ 1},
where the orientation of ΓR is given in a natural way by the parametrization of T
and [0, 1].
(e) An operator R ∈ alg T (PC) is compact if and only if the symbol smbR (t, λ) vanishes for all (t, λ) ∈ T × [0, 1].
In what follows, we show that the limit operators W 3/4 (Aτn ) belong to alg T (PC)
and consider their symbols as well as the respective curves (3.16). Using the results of
[10, Section 4] and the relations
p
i
λ
π
= ±(2λ − 1) + 2i λ(1 − λ) , 0 ≤ λ ≤ 1 ,
± log
i cot
4
4
1−λ
as well as
n
π
o
i cot
− iξ : −∞ ≤ ξ ≤ ∞ = γr [1, −1]
4
and
o
n
π
+ iξ : −∞ ≤ ξ ≤ ∞ = γℓ [−1, 1]
i cot
4
(cf. also (3.9), (3.10)), we get the following lemma.
L EMMA 3.9. Let τ ∈ {σ, µ} and Aτn = Mτn (aI + bS)Ln . The limit operators W t (Aτn ),
t ∈ {3, 4}, belong to the algebra alg T (PC), and their symbols are given by
1
:
Im t > 0,
−1
:
Im t < 0,
π
i
λ
i cot 4 + 4 log 1−λ
: τ ∈ {σ, µ}, t = 1,
smbW 3 (Aτn ) (t, λ) = a(1) + b(1) ·
i
λ
π
i cot 4 − 4 log 1−λ
: τ = σ,
t = −1,
−i cot π + i log λ
: τ = µ,
t = −1,
4
4
1−λ
and
smbW 4 (Aτn ) (t, λ) = a(−1) − b(−1) ·
1
−1
π
−i
cot
4 −
−i cot π +
4
i
4
i
4
log
log
λ
1−λ λ
1−λ
: Im t > 0,
: Im t < 0,
: t = 1,
: t = −1.
ETNA
Kent State University
http://etna.math.kent.edu
204
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
The respective closed curves (3.16) are
ΓW 3 (Aσn ) = γr [a(1) + b(1), a(1) − b(1)] ∪ γℓ [a(1) − b(1), a(1) + b(1)],
ΓW 3 (Aµn ) = γ[a(1) + b(1), a(1) − b(1)],
ΓW 4 (Aσn ) = ΓW 4 (Aµn )
= γℓ [a(−1) − b(−1), a(−1) + b(−1)] ∪ γr [a(−1) + b(−1), a(−1) − b(−1)].
We remark that the limit operators W t (Mτn (aI + bS)Ln ), t = 3, 4, are invertible if they
are Fredholm with index 0 [10, Corollary 4.9].
L EMMA 3.10 (Lemma 4.2 and Lemma 4.6 in [10]). Let Aτn = Mτn (aI + bS)Ln , where
τ ∈ {σ, µ}.
(a) If aI + bS : L2ν −→ L2ν is Fredholm, then W 3 (Aσn ) and W 4 (Aτn ) are invertible.
(b) The operator W 3 (Aµn ) is invertible if and only if |a(1)| > |b(1)|.
We turn to the limit operators of Bk± and verify that A, Aσ , Aµ ∈ alg T (PC). For this
we recall the following lemma.
L EMMA 3.11 (Lemma 7.1 in [12] and Lemma 4.5 in [13]). Suppose that the Mellin
transform yb(z) of the function y : (0, ∞) −→ C is analytic in the strip
1
1
− ε < Re z < + ε
2
2
for some ε > 0 and that
sup
1
1
2 −ε<Re z< 2 +ε
k
d
k
y
b
(z)(1
+
|z|)
< ∞,
dz k
k = 0, 1, . . .
f ±1 ∈ L(ℓ2 ) defined
Then, y : (0, ∞) −→ C is infinitely differentiable, the operators M±1 , M
by
∞
∞
j + 21
1
j+1
1
f
,
M+1 := y
M+1 := y
,
k + 1 k + 1 j,k=0
k + 21 k + 21 j,k=0
and
M−1 := (−1)
j−k
y
j+
k+
1
2
1
2
1
k+
1
2
∞
,
j,k=0
∞
1
j+1
j−k
f
M−1 := (−1) y
k + 1 k + 1 j,k=0
belong to the algebra alg T (PC), and their symbols are given by
( i
λ
yb 21 + 2π
log 1−λ
smbM+1 (t, λ) = smbM
f +1 (t, λ) =
0
: t = 1,
: t ∈ T\{1},
and
smbM−1 (t, λ) = smbM
f −1 (t, λ) =
(
yb
0
1
2
+
i
2π
log
λ
1−λ
: t = −1,
: t ∈ T\{−1}.
+ 2
+
2
For k ∈ N, set gk− (x) := 2h−
k (x )x and gk (x) := 2hk (x ) such that
b − ( z+1 )
bk− (z) = h
g
k
2
and
b + ( z ).
bk+ (z) = h
g
k 2
ETNA
Kent State University
http://etna.math.kent.edu
205
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
b ± (z) are analytic in the strip 0 < Re z < 1, it follows that
Since the Mellin transforms h
k
−
bk (z) is analytic in the strip −1 < Re z < 1 and g
bk+ (z) is analytic in the strip 0 < Re z < 2.
g
Hence, we can apply Lemma 3.11 and obtain that A, Aσ , Aµ ∈ alg T (PC) with symbols
m
−
X
3
i
λ
− b−
βk h k
: t = 1,
+
log
4 4π
1−λ
smbA (t, λ) =
k=1
0
: t ∈ T\{1},
m
+
X
b + 1 + i log λ
βk+ h
k
4 4π
1−λ
smbAτ (t, λ) =
k=1
0
From Proposition 3.4, Lemma 3.9, Lemma 3.11, and
conclude the following assertion.
L EMMA 3.12. Let τ ∈ {σ, µ} and
Aτn
=
Mτn
aI + bS +
m−
X
k=1
βk− Bk−
n
1
4π
+
log
m+
X
k=1
: t = 1,
: t ∈ T\{1}.
λ
1−λ
βk+ Bk+
: λ ∈ (0, 1)
!
o
= R, we
Ln .
Then, the limit operators W 3 (Aτn ) and W 4 (Aτn ) belong to the algebra alg T (PC) with
ΓW 3 (Aσn ) = a(1) + b(1)i cot π4 − iπξ : −∞ ≤ ξ ≤ ∞
)
(
m+
X
b + ( 1 + iξ) : −∞ ≤ ξ ≤ ∞ ,
βk+ h
∪ a(1) + b(1)i cot π4 + iπξ +
k 4
ΓW 3 (Aµn ) = a(1) − b(1)i cot
(
∪
π
4
a(1) + b(1)i cot
k=1
+ iπξ : −∞ ≤ ξ ≤ ∞
π
4
+ iπξ +
m+
X
k=1
and
ΓW 4 (Aτn ) = a(−1) + b(−1)i cot
(
∪
π
4
a(−1) + b(−1)i cot
b+( 1
βk+ h
k 4
)
+ iξ) : −∞ ≤ ξ ≤ ∞ ,
+ iπξ : −∞ ≤ ξ ≤ ∞
π
4
− iπξ +
m−
X
k=1
b−( 3
βk− h
k 4
+ iξ) : −∞ ≤ ξ ≤ ∞ .
C OROLLARY 3.13. Let τ ∈ {σ, µ} and
Aτn
=
Mτn
aI + bS +
m−
X
k=1
βk− Bk−
+
m+
X
k=1
)
βk+ Bk+
!
Ln .
For t ∈ {3, 4}, the limit operator W t (Aτn ) is invertible if and only if the closed curve ΓW t (Aτn )
does not contain the zero point, its winding number vanishes, and the null space of the operator W t (Aτn ) ∈ L(ℓ2 ) is trivial.
ETNA
Kent State University
http://etna.math.kent.edu
206
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
In the following three propositions, we give our final results concerning the invertibility
of the limit operators.
m
P− − −
βk Bk : L2ν −→ L2ν be invertible,
P ROPOSITION 3.14. Let A = aI + bS +
k=1
Aτn = Mτn ALn , and let W 4 (Aτn ) be Fredholm with index zero. Then,
(a) in case τ = σ, W 2 (Aσn ) and W 3 (Aσn ) are invertible,
(b) in case τ = µ, W 2 (Aµn ) and W 3 (Aµn ) are invertible if and only if |a(1)| > |b(1)|.
Proof. Write ΓA = Γ− ∪Γc ∪Γ+ , with Γc = Γ1 ∪Γ′1 ∪. . .∪ΓN +1 ; cf. Proposition 3.5(b).
In the present situation we have Γ+ = γr [c(1), 1]. Then (see Lemma 3.12),
e−
ΓW 4 (Aτn ) = [a(−1) − b(−1)] γℓ [1, c(−1)] ∪ Γ
and
ΓaI+bS = γℓ [1, c(−1)] ∪ Γc ∪ γr [c(1), 1],
e − is Γ− with reverse orientation. In view of Proposition 3.5 and Corollary 3.13,
where Γ
the invertibility of W 1 (Aτn ) and the vanishing index of W 4 (Aτn ) imply the invertibility of
aI + bS : L2ν −→ L2ν . Since the second and third limit operators are independent of Bk− (see
Proposition 3.4), it remains to apply Lemma 3.6 and Lemma 3.10.
The following two propositions can be proved analogously.
m
P+ + +
βk Bk : L2ν −→ L2ν be invertible,
P ROPOSITION 3.15. Let A = aI + bS +
k=1
Aτn = Mτn ALn , and let W 3 (Aτn ) be Fredholm with index zero. Then,
(a) in case τ = σ, W 2 (Aσn ) and W 4 (Aτn ) are invertible,
(b) in case τ = µ, W 2 (Aµn ) is invertible if and only if |a(1)| > |b(1)|.
P ROPOSITION 3.16. Let A = aI + bS +
m
P−
k=1
βk− Bk− +
m
P+
k=1
W 4 (Aτn )
βk+ Bk+ : L2ν −→ L2ν be
invertible, Aτn = Mτn ALn , and let W 3 (Aτn ) as well as
be Fredholm with index
zero. Then,
(a) in case τ = σ, W 2 (Aσn ) is invertible,
(b) in case τ = µ, W 2 (Aµn ) is invertible if and only if |a(1)| > |b(1)|.
3
P
Bk− : L2ν → L2ν and Aτn = Mτn ALn ,
E XAMPLE 3.17. Consider A = aI + bS +
k=1
√
√
τ ∈ {σ, µ}, where a(x) = i 1 − x + 1 and b(x) = − 1 + x − 1. In Figure 3.5, the curve
ΓA = Γ− ∪ Γc ∪ γr [c(1), 1] (blue, dashed, and red lines) is given.
The winding number of ΓA vanishes. Thus, the operator A is invertible (see Proposition 3.5(c)). If we replace the bloated arc Γ− (blue) by the circular arc γℓ [1, c(−1)] (green),
we get the curve concerning the operator aI + bS : L2ν → L2ν . Consequently, aI + bS is
Fredholm with index −1 and, in particular, not invertible. As a consequence of Lemma 3.7,
we derive
ind W 2 (Aσn ) = 1
and
ind W 2 (Aµn ) = 0.
W 3 (Aτn ) does not depend on the Mellin part of the operator and, due to Lemma 3.12,
ΓW 3 (Aσn ) = [a(1) − b(1)] (γr [c(1), 1] ∪ γℓ [1, c(1)])
and
ΓW 3 (Aµn ) = [a(1) − b(1)] (γℓ [c(1), 1] ∪ γℓ [1, c(1)]) .
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
207
origin
c(x)
γl[1,c(−1)]
0.4
γl[1,c(−1)]+Mellin
γr[c(1),1]
0.2
0
imag
−0.2
−0.4
−0.6
−0.8
−1
−1.2
−1.4
−1
−0.5
0
0.5
1
real
F IG . 3.5. ΓA for Example 3.17.
0.2
0
−0.2
−0.4
imag
−0.6
−0.8
−1
−1.2
−1.4
origin
c(x)
γ [1,c(−1)]
−1.6
γ [c(1),1]
−1.8
γr[c(1),1]+Mellin
l
l
−2
−1.5
−1
−0.5
real
0
0.5
1
F IG . 3.6. ΓA for Example 3.18.
Thus, by Proposition 3.8 and Lemma 3.9, ind W 3 (Aσn ) =0 and ind W 3 (Aµn
) = 1. The
e−
e − , where Γ
winding number of the curve ΓW 4 (Aτn ) = [a(−1) − b(−1)] γℓ [1, c(−1)] ∪ Γ
equals Γ− but with reverse orientation, is equal to 1. Thus, in view of Proposition 3.8 and
Lemma 3.12, the limit operators W 4 (Aτn ), τ ∈ {σ, µ}, are Fredholm with index −1.
E XAMPLE 3.18. Consider the functions a(x) = 1 − x and b(x) = 5 − x. Let
A = aI + bS +
Aτn
Mτn ALn ,
3
X
k=1
Bk+ : L2ν → L2ν
τ ∈ {σ, µ}. The image Γc of the function c(x), x ∈ [−1, 1], is the
=
and
straight segment from −2 to −1. The curve ΓA = γℓ [1, c(−1)] ∪ Γc ∪ Γ+ (green, dashed,
and blue lines) and the curve ΓaI+bS = γℓ [1, c(−1)] ∪ Γc ∪ γr [c(1), 1] (green, dashed, and
red lines) are given in Figure 3.6.
In view of Proposition 3.5, the operators A : L2ν −→ L2ν and aI + bS : L2ν → L2ν are
invertible. By Lemma 3.7, W 2 (Aσn ) is invertible and W 2 (Aµn ) is Fredholm with index −1.
ETNA
Kent State University
http://etna.math.kent.edu
208
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
For the fourth limit operators, we have (see Lemma 3.12)
ΓW 4 (Aτn ) = [a(−1) − b(−1)] (γℓ [1, c(−1)] ∪ γr [c(−1), 1])
e + and
implying their invertibility. Furthermore, ΓW 3 (Aσn ) = [a(1) − b(1)] γr [c(1), 1] ∪ Γ
e + , where Γ̃+ equals Γ+ but with reverse orienΓW 3 (Aµn ) = [a(1) − b(1)] γℓ [c(1), 1] ∪ Γ
tation. Thus, in view of Proposition 3.8 and Lemma 3.12, the limit operator W 3 (Aσn ) is
Fredholm with index 0, and the limit operator W 3 (Aµn ) is Fredholm with index 1.
4. The main theorem for the stability of the collocation methods. In this section we
investigate the invertibility of the coset (Aτn ) + J in the algebra F/J, where
m
P+ + +
P− − − m
βk Bk Ln is one of the considered collocation
Aτn = Mτn aI + bS +
βk B k +
k=1
k=1
methods. For this, we need some other operator sequences. Let R ∈ alg T (PC). We define
(t)
(t)
the finite sections Rn := Pn RPn ∈ L(im Pn ) and set Rtn := (En )−1 Rn En , t ∈ {3, 4}.
L EMMA 4.1 (Lemma 5.4 in [10]). For R ∈ alg T (PC) and t ∈ {3, 4}, the sequences
(Rtn ) belong to the algebra F.
Let m± ∈ N be fixed. Now we denote by A the smallest C ∗ -subalgebra of F generated
t
by all sequences of the ideal J, all sequences (R
n ) with t ∈ {3, 4} and R ∈ alg T (PC)
as
m
P+ + +
P− − − m
τ
β k B k Ln ,
βk B k +
well as by all sequences (An ) with An = Mn aI + bS +
k=1
k=1
k=1
k=1
∗
a, b ∈ PC. Moreover, let A0 be the smallest C
-subalgebra of F containing all sequences
m
P+ + +
P− − − m
τ
β k B k Ln ,
βk B k +
from J and all sequences (An ) with An = Mn aI + bS +
a, b ∈ PC. For the coset (An )+J, we use the abbreviation (An )o . As a main tool for proving
invertibility in the quotient algebra A/J, we use the local principle of Allan and Douglas. For
this, we have to find a C ∗ -subalgebra of the center of A/J as well as its maximal ideal space.
+
Let 0 < ε < 21 and define C−
ε (Cε ) as the Banach space of all continuous functions
f : (−1, 1] −→ C (f : [−1, 1) −→ C) satisfying
lim (1 + x)ε f (x) = 0
lim (1 − x)ε f (x) = 0
x→−1+0
x→1−0
with the norm
kf k∞,ε,± := sup {(1 ∓ x)ε |f (x)| : −1 < x < 1} .
2
Remark that C±
ε is continuously embedded into Lν .
L EMMA 4.2. For a polynomial p, the operators Bk± pI − pBk± : L2ν −→ C±
ε are compact.
Proof. For example, the operator Bk− pI−pBk− is an integral operator with kernel function
h−,k (x, y) =
[p(y) − p(x)](1 + x)k−1
.
(2 + y + x)k
Since (1+x)ε h−,k (x, y) is continuous on [−1, 1]×[−1, 1], we obtain the assertion by ArzelaAscoli’s theorem.
L EMMA 4.3. For f ∈ C[−1, 1], the cosets (Mτn f Ln )o belong to the center of A/J.
Proof. We have to show that
(4.1)
(Mτn f Ln An − An Mτn f Ln ) ∈ J
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
209
for all generating sequences (An ) of A. In the cases An = Mτn (aI + bS)Ln , a, b ∈ PC,
(t)
and An = Rn , t = 3, 4, this was proved in [10, Lemma 5.7]; cf. also [12, 13]. It remains to
consider An = Mτn Bk± Ln . In view of the estimate (see, [10, (3.11)])
kMτn f1 Ln − Mτn f2 Ln kL(L2ν ) ≤ const kf1 − f2 k∞ ,
and the closedness of J, it is sufficient to verify (4.1) for polynomials f . Thus, let p be a polynomial with deg p ≤ m. By Mτn pLn−m = pLn−m , n > m, and Ln − Ln−m = Wn Lm Wn ,
we derive
Mτn pLn Mτn Bk± Ln − Mτn Bk± Ln Mτn pLn
= −Mτn (Bk± p − pBk± )Ln + Mτn Bk± (I − Mτn )p(Ln − Ln−m )
= −Mτn (Bk± p − pBk± )Ln
+ Mτn (Bk± p − pBk± )Ln + Mτn pBk± Ln − Mτn Bk± Ln Mτn pLn Wn Lm Wn .
The application of the ideal property together with Lemma 4.2 completes the proof.
Lemma 4.3 shows that the set C := {(Mτn f Ln )o : f ∈ C[−1, 1]} forms a C ∗ -subalgebra
of the center of A/J. This subalgebra is via the mapping (Mτn f Ln )o → f ∗ -isomorphic to
C[−1, 1]. Consequently, the maximal ideal space of C is equal to {Tω : ω ∈ [−1, 1]} with
Tω := {(Mτn f Ln )o : f ∈ C[−1, 1], f (ω) = 0} .
By Jω we denote the smallest closed ideal of A/J which contains Tω , i.e., Jω is equal to
m
X
o
Ajn Mτn fj Ln : Ajn ∈ A, fj ∈ C[−1, 1], fj (ω) = 0, m = 1, 2, . . . .
closA/J
j=1
The local principle of Allan and Douglas claims the following.
P ROPOSITION 4.4 (cf. Sections 1.4.4, 1.4.6 in [9]). For all ω ∈ [−1, 1], the ideal Jω is
o
a proper ideal in A/J. An element (An )o of A/J is invertible if and only if (An ) + Jω is
invertible in (A/J)/Jω for all ω ∈ [−1, 1].
L EMMA 4.5. The cosets (Mτn Bk− Ln )o , 1 ≤ k ≤ m− , are contained in Jω , −1 < ω ≤ 1,
and the cosets (Mτn Bk+ Ln )o , 1 ≤ k ≤ m+ , are contained in Jω , −1 ≤ ω < 1.
Proof. Consider the case B = Bk− . (The case B = Bk+ has to be handled in the same
way.) Let −1 < ω ≤ 1 and let χ be a smooth function which vanishes in some neighborhood of −1 and satisfies χ(ω) = 1. Since χB : L2ν → C[−1, 1] is compact, the operator
norm k(Ln − Mτn )χBLn kL(L2 ) tends to zero. Due to the definition of the ideal J, we get
ν
(Mτn χBLn ) ∈ J. Thus,
o
(Mτn BLn )o = (Ln Mτn BLn − Mτn χBLn )o = Mτn (1 − χ)Ln Mτn BLn ∈ Jω .
The lemma is proved.
As a consequence of Lemma 4.5, for −1 < ω < 1, the invertibility of the coset
!o
m+
m−
X
X
+ +
− −
τ
+ Jω
Mn aI + bS +
β k B k Ln
βk B k +
k=1
k=1
is equivalent to the invertibility of (Mτn (aI + bS)Ln )o + Jω . In the same manner as in
[10, Corollary 5.13], we can state the following.
ETNA
Kent State University
http://etna.math.kent.edu
210
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
L EMMA 4.6. Let (An ) ∈ A0 . If the limit operator W 1 (An ) : L2ν −→ L2ν is Fredholm,
o
then for all ω ∈ (−1, 1), the coset (An ) + Jω is invertible in (A0 /J)/Jω .
o
Now, we consider the invertibility of (Aτn ) + J±1 in (A/J)/J±1 . To this end, we show
3
that the invertibility of the limit operators W (Aτn ) and W 4 (Aτn ) implies the invertibility of
o
o
(Aτn ) + J+1 and (Aτn ) + J−1 , respectively.
L EMMA 4.7 (Lemma 5.9 in [10]). Let a ∈ PC[−1, 1] be continuous at the point
o
ω ∈ [−1, 1] with a(ω) = 0. Then, (Mτn aLn ) ∈ Jω .
By C±1 we refer to the set all of continuous functions f ∈ C[−1, 1] with f (±1) = 1
o
and 0 ≤ f (x) ≤ 1 for all x ∈ [−1, 1]. For an arbitrary (An ) + J±1 ∈ (A/J)/J±1 , we have,
due to Lemma 4.7,
(4.2)
o
o
o
k(An ) + J±1 k(A/J)/J±1 ≤ inf k(Mτn f Ln ) (An ) kA/J .
f ∈C±1
The proof of the following lemma is given in Section 8.
L EMMA 4.8. Let R ∈ alg T (PC) and let
Aτn = Mτn
aI + bS +
S := W 3 (Aτn ), and T := W 4 (Aτn ).
m−
X
k0 =1
βk−0 Bk−0 +
m+
X
k0 =1
βk+0 Bk+0
!
Ln ,
o
o
3/4
3/4
+J±1
+J±1 is the inverse of Rn
(a) If R is invertible, then the coset [R−1 ]n
in (A/J)/J±1 .
o
o
o
o
(b) We have S3n + J1 = (Aτn ) + J1 and T4n + J−1 = (Aτn ) + J−1 .
For the generating sequences of A0 , we know that the limit operators with t ∈ {3, 4}
belong to alg T (PC); cf. Lemma 3.12. Since the mappings W 3/4 : F −→ L(ℓ2 ) are continuous ∗ -homomorphisms (see [10, Corollary 2.4]), we have W 3/4 (An ) ∈ alg T (PC) if
(An ) ∈ A0 . Thus, by Lemma 4.8 and the closedness of J±1 , we get the following corollary.
C OROLLARY 4.9. Let (An ) ∈ A0 . Then, the invertibility of W 3 (An ) and W 4 (An )
o
o
implies, respectively, the invertibility of (An ) + J+1 and (An ) + J−1 in (F/J)/J±1 .
Now, we are able to prove the stabilitytheorem for sequences of the algebra A0 , in par
m
P+ + +
P− − − m
τ
τ
βk Bk )Ln .
βk B k +
ticular, for the collocation method (An ) = Mn (aI + bS +
k=1
k=1
Indeed, with the help of Proposition 3.1, Lemma 4.6, Corollary 4.9, and the local principle of
Allan and Douglas, we can state the following theorem.
T HEOREM 4.10. A sequence (An ) ∈ A0 is stable if and only if all operators
W t (An ) : X(t) −→ X(t) , t = 1, 2, 3, 4, are invertible.
Having in mind Proposition 3.4, we set
A− := a(−1)I − b(−1)S̃ + A + K and
Aτ+ := a(1)I + b(1)Sτ + Aτ + Kτ .
Moreover, we define the curves
Γ− = a(−1) + b(−1)i cot π[ 41 + iξ] : −∞ < ξ < ∞
(
)
m−
X
− b− 3
1
∪ a(−1) + b(−1)i cot π[ 4 − iξ] +
βk hk ( 4 + iξ) : −∞ ≤ ξ ≤ ∞ ,
k=1
Γσ+ = a(1) + b(1)i cot π[ 41 − iξ] : −∞ < ξ < ∞
)
(
m+
X
+ b+ 1
1
βk hk ( 4 + iξ) : −∞ ≤ ξ ≤ ∞ ,
∪ a(1) + b(1)i cot π[ 4 + iξ] +
k=1
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
211
Γµ+ = a(1) − b(1)i cot π[ 41 + iξ] : −∞ < ξ < ∞
(
)
m+
X
b + ( 1 + iξ) : −∞ ≤ ξ ≤ ∞ .
∪ a(1) + b(1)i cot π[ 41 + iξ] +
βk+ h
k 4
k=1
With the help of Theorem 4.10, Corollary 3.13, Proposition 3.16, and Proposition 3.4, we
derive the following.
m
P+ + +
P− − − m
βk Bk : L2ν → L2ν .
βk B k +
T HEOREM 4.11. Let a, b ∈ PC and A = aI +bS +
k=1
k=1
Then, the collocation method Mτn ALn , τ ∈ {σ, µ}, is stable if and only if
(a) the operator A ∈ L(L2ν ) is invertible (cf. Proposition 3.5),
(b) the closed curves Γ− and Γτ+ do not contain the zero point and their winding numbers vanish,
(c) the null spaces of the operators A− , Aτ+ ∈ L(ℓ2 ) are trivial,
(d) in case τ = µ, the relation |a(1)| > |b(1)| is fulfilled.
5. Approximate solutions of the form ν(x)pn (x). In this section we consider the integral equation (2.1) in the space L2µ , which stands for the weighted L2 -space referring to the
fourth Chebyshev weight µ(x). Again we apply a collocation method to the integral equation.
However, this time the collocation method seeks an approximation un ∈ L2µ of the form
un (x) = ν(x)pn (x)
with a polynomial pn (x) of degree less than n. Setting
pbn (x) := ν(x)Rn (x), n = 0, 1, 2, . . .
ν(x)ℓτkn (x)
ℓbτkn =
, k = 1, . . . , n,
ν(xτkn )
and
we can write un in the form
un =
n−1
X
j=0
Introducing the Fourier projections
αjn pbj =
Lbn : L2µ −→ L2µ ,
n
X
k=1
u 7→
ξkn ℓbτkn .
n−1
X
j=0
hu, pbj iµ pbj
cτ := νLτ ν −1 I instead of the collocation methand the weighted interpolation operators M
n
n
od (2.3), we consider the collocation method
cτ AbLbn un = M
cτ fb,
cτ := M
A
n
n
n
(5.1)
un ∈ im Lbn
for solving the operator equation
approximately, where
Ab := aI + bS +
b = fb in L2ν
Au
m−
X
k=1
βk− Bk− +
m+
X
k=1
βk+ Bk+ : L2µ −→ L2µ .
ETNA
Kent State University
http://etna.math.kent.edu
212
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
Here and in what follows, for I, S, Bk± : L2ν −→ L2ν and for I, S, Bk± : L2µ −→ L2µ , we use
the same notation, which does not lead to any confusion. For the investigation of the stability
of the collocation method (5.1), we introduce the isometric isomorphism J : L2µ −→ L2ν ,
u(x) 7→ u(−x), and we get
J SJ −1 = −S,
J Bk± J −1 = (−1)k Bk∓ ,
and
J L̂n J −1 = Ln ,
where, for the last equality, we took into account the relation pbn (−x) = (−1)n pen (x). Since
xσn−j+1,n = −xσjn and xνn−j+1,n = −xµjn , j = 1, . . . , n, it follows that
ℓσn−j+1,n (−x) = ℓσj,n (x)
and
ℓνn−j+1,n (−x) = ℓµj,n (x),
which implies, for every function f : (−1, 1) → C, the relations J Lσn J −1 f = Lσn f and
J Lνn J −1 f = Lµn f . Consequently, using J νJ −1 = µI,
cσn J −1 f = Mσn f
JM
and
cνn J −1 f = Mµn f.
JM
Thus, we arrive at the following result: the collocation method (5.1) is equivalent to the
method
Mσn f : τ = σ,
An v n =
Mµn f : τ = ν,
for the approximate solution of
Av = f
in L2µ ,
where vn = J un ∈ im Ln , f = J fb, and
Mσn ALn
(5.2)
An =
Mµn ALn
: τ = σ,
: τ = ν,
as well as
A := e
aI − ebS +
m−
X
(−1)k βk− Bk+ +
k=1
m+
X
(−1)k βk+ Bk− ,
k=1
e
a(x) := a(−x), eb(x) := b(−x).
L EMMA 5.1. The collocation method Abτn given by (5.1) is stable in L2µ if and only if
the respective method (An ) defined by (5.2) is stable in L2ν .
This lemma enables us to check the stability of the method (5.1) in L2µ by applying
Theorem 4.11 to the sequence (5.2).
6. Computational aspects and numerical results. In this section we want to discuss
computational aspects of the collocation methods (2.4). In particular, we are interested in
a fast computation of the approximate solutions un of the collocation methods. Moreover,
we will present numerical results for specifically chosen a, b, βk± as well as for a specifically
chosen right-hand side f . First of all, if we want to compute the solutions un , we can solve
the corresponding system of linear equations
e n ξen = ηen ,
A
(6.1)
where the involved matrices and vectors are given by
h
in
n
e n = (Aℓeτ )(xτ )
A
, ξen = ξkn k=1 ,
jn
kn
j,k=1
ηen =
f (xτkn )
n
k=1
,
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
213
n
o
and where ξkn are the coefficients of un in the basis ℓeτkn ; k = 1, . . . , n of the space im Ln .
Since this basis is not orthonormal, the stability of the collocation method does not imply the
e n . With the help of the Gausuniform boundedness of the condition numbers of n
the matrices A
o
1
sian quadrature rule, one can show that the set (ωnτ )−1 (1 + xτkn )− 2 ℓeτkn : k = 1, . . . , n
forms an orthonormal basis of im Ln . The matrix representation of the operators Mτn ALn in
this basis is given by the matrix
in
h q
1+xτjn
τ
τ
e
,
An :=
(A
ℓ
)(x
)
jn
kn
1+xτ
j,k=1
kn
which is equal to the operator (Vnτ )−1 Mτn ALn Vnτ : im Ln −→ im Ln . Consequently, in
case of stability of the collocation method (Aτnh), the
i can be preconditioned with
q system (6.1)
1 + xτjn
the help of the diagonal matrices Dn = diag
system
n
j=1
, and we have to solve the
An ξn = ηn ,
where
e n D−1 ,
An = Dn A
n
ηn = Dn ηen ,
and
ξn = Dn ξen .
Thus, we are mainly interested in the fast computation of the entries of the matrices
n
r
1+xτjn
τ
τ
τ
e
Sn =
S ℓkn (xjn )
1+xτ
kn
j,k=1
and
Bτ,±
k0 ,n
=
r
1+xτjn
1+xτkn
Bk±0 ℓeτkn
(xτjn )
n
j,k=1
or/and in the fast application of these matrices to a vector. Let us represent the weighted
fundamental Lagrange interpolation polynomials in the form
n
X
Then,
ℓeτkn (x) =
(6.2)
Sτn = Dn Hτn Jτn D−1
n
m=1
E
D
ετmk = ℓeτkn , pem−1 .
ετmk pem−1 (x),
and
ν
τ,± τ −1
Bτ,±
k0 ,n = Dn Hk0 ,n Jn Dn ,
where
Jτn =
and
Hτ,±
k0 ,n =
In view of (7.9) we have
(S pem−1 )(xτjn )
=
ετmk
n
m,k=1
,
Hτn =
(S pem−1 )(xτjn )
0
(±2 − xτjn )
(−1)k0 −1 hkm−1
iRm−1 (xτjn )
=q
i
1 + xτjn
r
2
π
(
n
j,m=1
n
j,m=1
.
cos (2j−1)(2m−1)π
4n
cos
,
j(2m−1)π
2n+1
: τ = σ,
: τ = µ.
ETNA
Kent State University
http://etna.math.kent.edu
214
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
Defining the matrices
n
(2j − 1)(2k − 1)π
σ,8
Cn = cos
4n
j,k=1
we can write
and
Cµ,7
n
q
σ,8
i 2 D−1
π n Cn
q
Hτn =
i 2 D−1 Cµ,7
n
π n
(6.3)
=
j(2k − 1)π
cos
2n + 1
n
,
j,k=1
: τ = σ,
: τ = µ.
The entries ετmk of Jτn can be computed with the help of the respective Gaussian rules, namely
√ q
λσkn
(2m − 1)(2k − 1)π
2π
σ
σ
σ
εmk =
1 + xσkn sin
(1 − xkn )Pm−1 (xkn ) =
σ
µ(xkn )
n
4n
and
√ q
λµkn
(2m − 1)kπ
2π
µ
µ
.
εmk =
1 + xµkn sin
µ Pm−1 (xkn ) =
1
µ(xkn )
2n + 1
n+ 2
Thus,
Jσn
(6.4)
=
√
2π σ,8
Sn Dn
n
and
Jµn
µ,7
where the matrices Sσ,8
n and Sn are defined by
n
(2j − 1)(2k − 1)π
Sσ,8
=
sin
and
n
4n
j,k=1
√
2π µ,7
=
S Dn ,
n + 21 n
Sµ,7
n =
sin
(2j − 1)kπ
2n + 1
n
.
j,k=1
From (6.2), together with (6.3) and (6.4), we conclude
Sσn =
4i σ,8 σ,8
C S
2n n n
and
Sµn =
4i
Cµ,7 Sµ,7
2n + 1 n n
as well as
Bσ,±
k0 ,n
=
√
2π
σ,8
Dn Hσ,±
k0 ,n Sn
n
and
Bµ,±
k0 ,n
√
2π
µ,7
=
Dn Hµ,±
k0 ,n Sn .
n + 21
µ,8
σ,4
µ,7
The matrices Cσ,8
n , Cn , Sn , and Sn represent well-known discrete cosine and sine transforms. This enables us to apply them to a vector of length n with O(n log n) complexity. So,
it remains to consider the matrices Hτ,±
k0 ,n . For this, we use the recurrence relations (cf. (7.1)
and (7.2))
Z
2
2 1
µ(y)P0 (y) dy = √ ,
(6.5)
h11 (x) − (2x + 1)h10 (x) =
πi −1
πi
Z 1
2
(6.6)
µ(y)Pn (y) dy = 0, n ≥ 1,
h1n+1 (x) − 2xh1n (x) + h1n−1 (x) =
πi −1
and, for k > 1,
(6.7)
(6.8)
hk1 (x) − (2x + 1)hk0 (x) = 2(1 − |x|)h0k−1 (x),
hkn+1 (x) − 2xhkn (x) + hkn−1 (x) = 2(1 − |x|)hnk−1 (x),
n ≥ 1.
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
215
To compute the entries of Hτ,±
k0 ,n , we solve the linear systems
−(2z + 1)
1
1
−2z
..
.
1
..
.
1
..
.
−2z
1
1
−2z
h10 (z)
h11 (z)
..
.
√2
πi
0
.
..
=
h1n−3 (z)
0
1
1
hn−2 (z)
−hn−1 (z)
and, for k = 2, 3, . . . ,
−(2z + 1)
1
1
−2z
..
.
1
..
.
1
..
.
−2z
1
1
−2z
hk0 (z)
hk1 (z)
..
.
2(1 − |z|)h0k−1 (z)
2(1 − |z|)h1k−1 (z)
..
.
=
k−1
hkn−3 (z)
(z)
2(1 − |z|)hn−3
k−1
k
hkn−2 (z)
2(1 − |z|)hn−2 (z) − hn−1 (z)
for z = ±2 − xτjn , j = 1, . . . , n. To use these systems and not the forward recurrences
suggested by (6.5), (6.6) and (6.7), (6.8) is motivated by the following fact. In case |x| > 1,
the roots of the characteristic polynomial √
λ2 −2xλ+1 of the second order difference equation
(6.6) or (6.8) are equal to λ1/2 = x ± x2 − 1. Consequently, one of these roots has an
absolute value greater than 1, and it is well known that this leads to instabilities in the forward
computation; cf. also the discussion in [17, pp. 362, 363].
Of course, the values hkn−1 (z) have to be precomputed. For this we can use appropriate
Gaussian rules of sufficiently high order N . For example,
0
(2 − x) =
hkn−1
≈
(x − 1)k0 −1
πi
(x − 1)
iN
k0 −1
Z
1
−1
(1 − y)Pn−1 (y)
dy
p
(y + x − 2)k0
1 − y2
N
X
(1 − xσkn )Pn−1 (xσkn )
(xσkn + x − 2)k0
k=1
with N sufficiently large.
Now we turn back to the integral equation
(6.9)
1
π
Z
1
−1
1
1
6(1 + x)
4(1 + x)2
u(y) dy = f (x),
−
+
−
y − x 2 + y + x (2 + y + x)2
(2 + y + x)3
− 1 < x < 1,
of the notched half plane problem already mentioned in the introduction of this paper. As
stated there, we should take into account that the solution has a singularity of the form
1
(1 − x)− 2 . Thus, we try to apply a collocation method in which the approximate solution
has the form un (x) = ν(x)pn (x) with a polynomial pn (x) of degree less than n. With the
notations of Section 5, this means that we consider the collocation method
(6.10)
where
cτn ALbn un = M
cτn f,
Abτn un := M
un ∈ im Lbn ,
Ab := iS − iB1− + 6iB2− − 4iB3− .
τ ∈ {σ, ν} ,
ETNA
Kent State University
http://etna.math.kent.edu
216
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
origin
γ [1,c(−1)]
0.2
l
γ [c(1),1]+Mellin
r
0
−0.2
imag
−0.4
−0.6
−0.8
−1
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
real
0.2
0.4
0.6
0.8
1
F IG . 6.1. ΓA for the operator (6.11).
Due to Lemma 5.1, the stability of the collocation method (6.10) in L2µ is equivalent to the
stability of the method (An ) in L2ν , where
(
Mσn ALn : τ = σ,
An =
Mµn ALn : τ = ν,
and
A = S − B1+ − 6B2+ − 4B3+ .
(6.11)
Let us verify the conditions of Theorem 4.11. Due to Proposition 3.5, for the invertibility of
A : L2ν −→ L2ν , we have to show that the closed curve
ΓA = −i cot π4 + iπξ : −∞ ≤ ξ ≤ ∞
n
o
b + 1 − iξ + 6h
b + 1 − iξ + 4h
b + 1 − iξ : −∞ ≤ ξ ≤ ∞
∪ −i cot π4 − iπξ + h
1 4
2 4
3 4
does not contain 0 and that its winding number is equal to zero, but this can be seen from
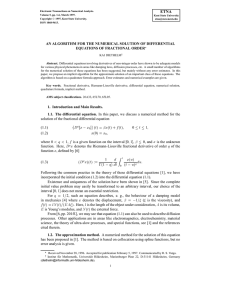
Figure 6.1. (Of course, the invertibility of A : L2ν −→ L2ν is equivalent to the invertibility
of Ab : L2µ −→ L2µ , which was already verified in [1, p. 101].) Obviously, condition (d) of
Theorem 4.11 is not fulfilled, which implies that the sequence Abνn for the collocation with
respect to the Chebyshev nodes of third kind is not stable. Therefore, we concentrate on the
case τ = σ. Due to condition (b) of Theorem 4.11, we have to consider the curves
Γ− = i cot π4 + iπξ : −∞ ≤ ξ ≤ ∞ ∪ i cot π4 − iπξ : −∞ ≤ ξ ≤ ∞
= γℓ [−1, 1] ∪ γr [1, −1] = {z ∈ C : |z| = 1, Im z ≥ 0}
and
Γσ+ = cot
n
∪ cot
− iπξ : −∞ ≤ ξ ≤ ∞
π
b+ 1
b+
4 + iπξ − h1 4 + iξ − 6h2
π
4
1
4
b+
+ iξ − 4h
3
1
4
o
+ iξ : −∞ ≤ ξ ≤ ∞ .
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
TABLE 6.2
Collocation for (6.9) with τ = ν.
TABLE 6.1
Collocation for (6.9) with τ = σ.
n
8
16
32
64
128
256
512
1024
2048
e n)
cond(A
13.5
27.1
54.1
108.1
216.1
432.2
864.3
1728.5
3456.9
217
cond(An )
1.32
1.35
1.37
1.38
1.40
1.41
1.41
1.42
1.42
n
8
16
32
64
128
256
512
1024
2048
e n)
cond(A
16.1
30.3
58.7
115.5
229.1
456.3
910.9
1820.0
3638.4
cond(An )
5.00
7.37
10.66
15.24
21.63
30.66
43.51
61.79
87.63
Of course, the winding number of Γ− is equal to zero and since Γσ+ = −ΓA (with reverse
direction), this is also true for Γσ+ . Due to the complicated structure of the compact operators
Kσk0 and Kk0 (cf. (7.34) and (7.36)) in the definition of Aσ+ and A− (cf. (3.3), (3.4), and
(7.37)), we are not able to check if condition (c) of Theorem 4.11 holds true. But, the results
shown in Table 6.1 (already presented in [1, table on page 112], where one can also find
computed values for the stress intensity factor and the crack opening displacement which are
of practical interest) suggest that the collocation method (6.10) with τ = σ applied to (6.9) is
stable.
On the other hand, Table 6.2 confirms our theoretical result that the collocation method
(6.10) for τ = ν applied to (6.9) is not stable.
7. Proof of Proposition 3.4. At a first step, we compute the values Bk± pen for the com2
plete orthonormal system (e
pn ) ∞
n=0 (in Lν ). Define
Z
(1 − |x|)k−1 1 µ(y)Pn (y)
hkn (x) :=
dy, n ≥ 0, |x| > 1, k = 1, 2, . . . ,
k
πi
−1 (y − x)
and set hn (x) := h1n (x). It is well known that the following recursion formula holds
1
1
P0 (x) = √ , P1 (x) = √ (2x + 1).
π
π
Pn+1 (x) = 2xPn (x) − Pn−1 (x), n ≥ 1,
Using this formula, we get
(7.1)
2
hn+1 (x) − 2xhn (x) + hn−1 (x) =
πi
Z
2
πi
Z
and
(7.2)
h1 (x) − (2x + 1)h0 (x) =
1
µ(y)Pn (y) dy = 0,
−1
1
2
µ(y)P0 (y) dy = √ .
πi
−1
In order to solve these recursion formulas, we have to determine the values
Z
√
1 1 µ(y) dy
i π h0 (x) :=
.
π −1 y − x
Setting
1
γ(x) :=
π
Z
1
−1
n≥1
σ(y) dy
,
y−x
ETNA
Kent State University
http://etna.math.kent.edu
218
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
we easily obtain
√
i π h0 (x) = (1 − x)γ(x) − 1.
Let us compute γ(x). Using the substitutions y = cos s as well as z = tan 2s , we get
Z
Z ∞
dz
−2
1 1 σ(y) dy
sgn(x)
=
, |x| > 1.
γ(x) =
= −√
x−1
2
π −1 y − x
π(x + 1) 0 x+1 + z
x2 − 1
Consequently,
√
i π h0 (x) =
r
x−1
− 1,
x+1
|x| > 1.
Using the recursion formulas (7.1), (7.2), we are now able to compute hn (x). The zeros
2
of the
√ characteristic polynomial p(t) = t − 2xt + 1 for the recursion (7.1) are given by
2
x ± x − 1. Thus, the solution has the form
p
p
n
n
√
i π hn (x) = δ0 x + x2 − 1 + δ1 x − x2 − 1 ,
where the δi are determined by the initial values h0 (x) and h1 (x). Formula (7.2) gives
!
r
√
x−1
− 1 + 2,
i πh1 (x) = (2x + 1)
x+1
and so, for |x| > 1, we get
(7.3)
√
i π hn (x) =
r
!
n
p
x−1
−1
x − sgn(x) x2 − 1 .
x+1
If k ≥ 2, we can use the relations
Z 1
Z 1
µ(y)Pn (y)
µ(y)Pn (y)
dk−1
1
dy
=
dy,
(7.4)
k
k−1
(k − 1)! dx
y−x
−1
−1 (y − x)
k ≥ 1, |x| > 1.
For the determination of the derivatives, we state the following lemma.
L EMMA 7.1. Let k ∈ N be arbitrary. Then the following equation is true
n n k−1
p
p
X nk−s pk (x)
dk s
2−1
2−1
x
x
x
±
=
x
±
k+s ,
2 − 1) 2
dxk
(x
s=0
|x| > 1,
where pks (x) are polynomials with pk0 (x) = (±1)k and deg pks ≤ s.
Proof. Let us proof this fact by induction with respect to k ∈ N. For k = 1, we have
n−1 p
p
x
d
n 1± √
(x ± x2 − 1)n = x ± x2 − 1
dx
x2 − 1
n ±n
p
.
= x ± x2 − 1 √
x2 − 1
Hence,
#
"
n
n k−1
p
p
X nk−s pk (x)
dk+1 d
s
x ± x2 − 1
x ± x2 − 1 =
k+s
2
dxk+1
dx
2
s=0 (x − 1)
#
"k−1
n X ±nk+1−s pk (x) k−1
k
p
X nk−s qs+1
(x)
s
2
= x± x −1
+
,
k+1+s
k+s
2
2
2
2 +1
s=0 (x − 1)
s=0 (x − 1)
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
219
where
k
qs+1
(x) := (x2 − 1)
k+s
pks (x)
d
dpks (x)
− (k + s)x pks (x) = (x2 − 1) 2 +1
.
dx
dx (x2 − 1) k+s
2
It follows that
n
p
dk+1 2−1
x
±
x
dxk+1
#
"
k
n ±nk+1 pk (x) k−1
p
X nk+1−s pk (x) X
nk+1−s qsk (x)
s
0
2
= x± x −1
k+1 ±
k+1+s +
k+1+s
2
2
2
2
(x2 − 1) 2
s=1 (x − 1)
s=1 (x − 1)
#
"
k−1
n ±nk+1 pk (x) X nk+1−s q k (x) ± pk (x)
k
p
n
q
(x)
s
s
0
k
= x ± x2 − 1
+
.
1
k+1 +
k+1+s
(x2 − 1)k+ 2
(x2 − 1) 2
(x2 − 1) 2
s=1
If we set
pk+1
(x) := qsk (x) ± pks (x), 1 ≤ s ≤ k − 1,
s
pk+1
(x) := qkk (x),
k
pk+1
(x) := ±pk0 (x) = (±1)k+1 ,
0
then we arrive at
k
n n X
p
p
dk+1 (x)
nk+1−s pk+1
s
2−1
2−1
x
x
x
±
=
x
±
k+1+s .
k+1
2
dx
2
s=0 (x − 1)
The lemma is proved.
We mention that there exist polynomials pk−1 (x) with p−1 ≡ 1 and deg pk−1 ≤ k − 1,
k ≥ 1, such that
! r
r
x−1
x − 1 pk−1 (x)
dk
=
(7.5)
, |x| > 1,
dxk
x+1
x + 1 (x2 − 1)k
which can also be proved by induction. With the help of (7.3), (7.4), (7.5), and Lemma 7.1
we can write, for |x| > 1 and k ≥ 1,
(7.6)
" r
!
#
n
k−1
k−1
p
x
−
1
d
(1
−
|x|)
x − sgn(x) x2 − 1
−1
hkn (x) = √
x+1
πi(k − 1)! dxk−1
n
p
(1 − |x|)k−1 x − sgn(x) x2 − 1
= √
πi(k − 1)!
# ℓ−1
"r
k−1
X nℓ−s pℓ (x)
X k − 1
x − 1 pk−2−ℓ (x)
s
−
δ
·
k−1,ℓ
ℓ+s
2
x + 1 (x2 − 1)k−1−ℓ
ℓ
2
s=0 (x − 1)
ℓ=0
"r
ℓ−s
k−1
ℓ−1
x − 1 X k − 1 X pk−2−ℓ (x) pℓs (x) nℓ−s (|x| − 1) 2
(−1)k−1
=√
ℓ−s
x+1
ℓ
πi(k − 1)!
(|x| + 1)k−1− 2
s=0
ℓ=0
#
k−2
n
p
X pk−1 (x) nk−1−s (|x| − 1) k−1−s
2
s
2−1
x
−
sgn(x)
x
, n ≥ 1,
−
k−1+s
(|x| + 1) 2
s=0
ETNA
Kent State University
http://etna.math.kent.edu
220
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
and
hk0 (x)
(7.7)
(−1)k−1
=√
πi(k − 1)!
r
x − 1 pk−2 (x)
1
− √ δ1,k ,
x + 1 (|x| + 1)k−1
πi
where the sums in (7.6) with negative upper limit are equal to 1. For example, the values
hkn (x), k = 2, 3, x < −1, are given by
!#
"
r
n
p
√ 2
x+1
1
x + x2 − 1 ,
i π hn (x) = − √
−n 1−
x−1
x2 − 1
and
√
i π h3n (x) =
r
!
r
x+1 3 1
x+1
n
1
1
x
+
1−
−
−
x − 1 2 x2 − 1 x − 1
2
x − 1 (x − 1) x − 1
!
r
n
p
x+1
n2 x + 1
−
x + x2 − 1 .
−
2 x−1
x−1
For the determination of the limits W 3/4 (Mτn Bk± Ln ) in case τ = σ, we have to compute the
values
Z
(1 − |x|)k−1 1 µ(y)Tn (y)
e
dy, n ≥ 0, |x| > 1, k ≥ 1.
hkn (x) :=
k
πi
−1 (y − x)
Again set e
hn (x) := e
h1n (x). The following relation
cn e
hn (x) = (1 − x)e
γn (x) − δ0,n
holds, where
and c0 =
as well as
√
π i, cn =
pπ
2
cn
γ
en (x) =
πi
Z
1
−1
σ(y)Tn (y)
dy
y−x
i, n ≥ 1. We can state the recursion formula
γ
en−1 (x) − 2xe
γn (x) + γ
en+1 = 0,
n ≥ 1,
−xe
γ0 (x) + γ
e1 (x) = 1.
Now we can solve the formula as in the previous case. For |x| > 1, we obtain
Thus,
γ
en1 (x)
hn (x) =
cn e
√
n
x − sgn(x) x2 − 1
√
= −sgn(x)
.
x2 − 1
r
n
p
x−1
x − sgn(x) x2 − 1 − δ0,n .
x+1
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
221
We obtain, for n ≥ 1,
hkn (x)
cn e
(7.8)
#
"r
n
p
x−1
(1 − |x|)k−1 dk−1
x − sgn(x) x2 − 1
=
(k − 1)! dxk−1
x+1
n r x − 1
p
(−1)k−1 =
x − sgn(x) x2 − 1
(k − 1)!
x+1
k−1
l−1
X k − 1 X pk−l−2 (x) pl (x)
l−s
s
l−s
(|x| − 1) 2
·
l−s n
k−1−
l
2
s=0 (|x| + 1)
l=0
and
(−1)k−1
hk0 (x) =
c0 e
(k − 1)!
r
x − 1 pk−2 (x)
− δ1,k .
x + 1 (|x| + 1)k−1
For instance, if x < −1, then
p
n
1
n+ √
h2n (x) = − x + x2 − 1
cn e
x2 − 1
and
r
x−1
3
x+1
cn e
+
h3n (x) =
x + 1 2(x − 1)2
(x − 1)2
r
p
n
n2 x + 1
n x+1
3
+
+
x + x2 − 1 .
−
2 x−1 x−1
2
x−1
Let R = R(−1, 1) denote the set of all functions f : (−1, 1) −→ C, which are bounded and
Riemann integrable on each closed subinterval [a, b] ⊂ (−1, 1).
L EMMA 7.2 (Corollary 3.3 in [10]). Let f ∈ R and
1
3
|f (x)| ≤ const (1 − x)ε− 4 (1 + x)ε− 4 ,
−1 < x < 1,
for some ε > 0. Then,
Mτn f −→ f
in
L2ν
for τ ∈ {σ, µ}.
Let k : [−1, 1] × [−1, 1] −→ C be a continuous kernel function and
Z 1
k(x, y)u(y) dy, u ∈ L2ν ,
(Ku)(x) :=
−1
the associated integral operator.
L EMMA 7.3. If k : [−1, 1] × [−1, 1] −→ C is continuous, then K : L2ν −→ C[−1, 1] is
a compact operator. In particular, (Mτn KLn ) ∈ J for τ ∈ {σ, µ}.
Proof. Let u ∈ L2ν and ε > 0. Since k(x, y) is uniformly continuous on [−1, 1]×[−1, 1],
there exists a positive number δ = δ(ε) such that |x − x′ | < δ and x, x′ ∈ [−1, 1] implies
|k(x, y) − k(x′ , y)| < ε. Thus, for |x − x′ | < δ, we have
Z 1
|k(x, y) − k(x′ , y)| p
′
p
|(Ku)(x) − (Ku)(x )| ≤
ν(y)|u(y)| dy
ν(y)
−1
≤ εk1kµ kukν = const εkukν .
ETNA
Kent State University
http://etna.math.kent.edu
222
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
Consequently, the set {Ku : u ∈ L2ν , kukν ≤ 1} is bounded and equicontinuous. The
Arzela-Ascoli theorem yields the compactness of K : L2ν −→ C[−1, 1]. With the help of
Lemma 7.2, we get kMτn KLn − Ln KLn kL(L2ν ) −→ 0. Hence, (Mτn KLn − Ln KLn ) ∈ J,
which implies (Mτn KLn ) ∈ J.
If A(x, n, . . . ) and B(x, n, . . . ) are two positive functions depending on certain variables
x, n, . . . , then we write A ∼x,n,... B if there is a constant C 6= C(x, n, . . . ) > 0 such that
C −1 B(x, n, . . . ) ≤ A(x, n, . . . ) ≤ CB(x, n, . . . )
holds.
L EMMA 7.4. Let n ∈ N, k = 0, 1, . . . , n, and τ ∈ {σ, ϕ, ν, µ}. For the zeros xτkn of the
orthogonal polynomials pτn , we have, for all sufficiently large n,
Z
xτkn
xτk+1,n
r
1+x
1
dx ∼k,n (1 + xτkn ),
1−x
n
where xτ0n := 1, xτn+1,n := −1.
Proof. Of course,
Z
xτkn
xτk+1,n
r
1+x
dx =
1−x
Z
xτkn
xτk+1,n
1+x
π
√
dx ≤ (1 + xτkn ) .
2
n
1−x
Moreover, in case τ = σ and for sufficiently large n,
Z
xσ
kn
xσ
k+1,n
r
1+x
dx =
1−x
Z
xσ
kn
xσ
k+1,n
√
1
dx +
1 − x2
Z
xσ
kn
x
√
dx
1 − x2
xσ
k+1,n
kπ
π
π
1 + cos
sin 2n ≥ C
n
n
1 π
+ 2 cos kπ
n
2 n
k − 12
k − 21
π
π
π
1 + cos
π cos
− sin
π sin
=C
n
n
2n
n
2n
1
k− 2
π
π
π
1 + cos
π cos
− sin
≥C
n
n
2n
2n
k − 12
1
1
1 + cos
π = (1 + xσkn ).
∼k,n
n
n
n
≥
The proof for the other nodes is analogous.
Define Bek± , k ∈ N, by
1
(Bek± u)(x) =
πi
Z
1
−1
(1 ∓ y)k−1 u(y) dy
,
(y + x ∓ 2)k
−1 < x < 1.
±
By induction one can show that there exist constants c±
kj and dkj such that
Bk± =
k
X
j=1
e
c±
kj Bj
and
Bek± =
k
X
j=1
±
d±
kj Bj .
ETNA
Kent State University
http://etna.math.kent.edu
223
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
Since, for u ∈ L2ν and x, x0 ∈ (−1, 1],
e−
(Bk u)(x) − (Bek− u)(x0 )
k
P
k
k−j
j
j
k−1
(1 + x0 ) − (1 + x) u(y) Z 1 (1 + y)
j (1 + y)
1
j=0
≤
dy
π −1 (1 + y + 1 + x)k (1 + y + 1 + x0 )k
≤
1
x)k (1
+ x 0 )k
2
k X
k
k−j
j
j
(1 + y)k−1
(1 + y)
[(1 + x0 ) − (1 + x) ] µ(y) dy kukν ,
j
−1 j=0
π(1 +
v
u
uZ 1
u
·t
the functions (Bek− u)(x) and (Bk− u)(x) are continuous for −1 < x ≤ 1 if u ∈ L2ν . The
same is true for (Bek+ u)(x) and (Bk+ u)(x) , −1 ≤ x < 1, and u ∈ L2ν . Hence, the values
(Bk± u)(xτjn ) are well defined.
L EMMA 7.5. Let τ ∈ {σ, µ}. Then, for k ∈ N,
Mτn Bk± Ln −→ Bk± ,
(Mτn Bk± Ln )∗ −→ (Bk± )∗
Mτn Bek± Ln −→ Bek± ,
(Mτn Bek± Ln )∗ −→ (Bek± )∗
and
in the sense of strong convergence in L2ν .
Proof. Let u ∈ L2ν . With the help of the exactness of the Gaussian rule for polynomials
of degree less than 2n, we have
n
√
πX
kMσn Bek± uk2ν = k 1 − xLσn ν Bek± uk2σ =
(1 + xσkn )|(Bek± u)(xσkn )|2
n
k=1
and
kMµn Bek± uk2ν = kLµn ν Bek± uk2µ =
π
n+
n
X
(1
1
2 k=1
+ xµkn )|(Bek± u)(xµkn )|2 .
Taking into account Lemma 7.4, we can estimate for τ = σ, τ = µ, and for all sufficiently
large n
kMτn Bek− uk2ν
≤ const
≤ const
n Z
X
k=1
n Z
X
k=1
Z
1
xτkn
xτk+1,n
xτkn
xτk+1,n
r
r
1+x
dx
1−x
1+x
1−x
Z
1
π
1
π
Z
Z
1
−1
1
−1
(1 + y)k−1 |u(y)| dy
(y + xτkn + 2)k
2
2
dx
(1 + y)k−1 |u(y)| dy
(y + x + 2)k
1
(1 + y)k−1 |u(y)| dy
ν(x)
≤ const
(y + x + 2)k
−1
−1
2
2
2
= const Bek− |u| ν ≤ const Bek− L(L2 ) kukν .
1
π
ν
2
dx
ETNA
Kent State University
http://etna.math.kent.edu
224
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
To handle kMτn Bek+ ukν , we use the estimate
Z
xτk−1,n
xτkn
r
1+x
π
dx ≥ (1 + xτkn ) ,
1−x
n
k = 1, . . . , n,
and get
kMτn Bek+ uk2ν
r
2
Z 1
1+x
(1 − y)k−1 |u(y)| dy
1
dx
≤
τ
1−x
π −1 (2 − y − xτkn )k
k=1 xkn
Z
2
n Z xτk−1,n r
X
1 + x 1 1 (1 − y)k−1 |u(y)| dy
dx
≤
τ
1 − x π −1
(2 − y − x)k
k=1 xkn
Z 1
2
Z 1
1
(1 − y)k−1 |u(y)| dy
ν(x)
≤
dx
π −1
(2 − y − x)k
−1
2 2
2
= Bek+ |u| ν ≤ Bek+ L(L2 ) kukν .
n Z
X
xτk−1,n
ν
Since the operators Bek± : L2ν −→ L2ν are bounded, we obtain uniform boundedness of
the sequences Mτn Bek± and Mτn Bk± . If u ∈ L∞ , then the continuous function
Bk± µu : (−1, 1) −→ C satisfies the estimate
i
h
1
|(Bk± µu)(x)| ≤ const hk0 (−x ± 2) ≤ const (1 ∓ x)± 2 + 1 ,
where we took into account (7.7). Thus, applying Lemma 7.2,
lim Mτn Bk± µu = Bk± µu
n→∞
in L2ν , for u ∈ L∞ .
With the help of the Banach-Steinhaus theorem, we get strong convergence of Mτn Bk± −→ Bk±
as well as Mτn Bek± −→ Bek± in L2ν .
For convergence of the adjoint operators, we remark that, for a continuous function
χ : [−1, 1] −→ C vanishing in a neighborhood of ±1, the operator χBk± is an integral op±
2
C[−1, 1] is compact. Hence, by
erator with continuous kernel
so that χBk : Lν −→
±
τ
Lemma 7.3, Mn χBk Ln ∈ J. In particular, (Mτn χBk Ln )∗ converges strongly in L2ν .
Now, let f ∈ C[−1, 1] be vanishing in a neighborhood of ±1. The set of these functions is
dense in L2ν . Moreover, there exists a continuous and real valued function χ vanishing in a
∗
τ
neighborhood of ±1 such that χf = f . Due to (Mτn χL
n ) = Mn χLn (cf. [10, (3.13)]) and
τ ±
the uniform boundedness of the sequence Mn Bk Ln , we get
(Mτn Bk± Ln )∗ (Ln f − Mτn f ) −→ 0
and
(Mτn Bk± Ln )∗ Mτn f = (Mτn Bk± Ln )∗ Mτn χLn Mτn f
= (Mτn χBk± Ln )∗ Mτn f −→ (χBk± )∗ f = (Bk± )∗ f
in L2ν . The lemma is proved.
Recall the following version of Lebesgue’s dominant convergence theorem.
∞
L EMMA 7.6. If ξ, η ∈ ℓ2 , ξ n = (ξkn )k=1
, |ξkn | ≤ |ηk | ∀ k = 0, 1, 2, . . ., ∀ n ≥ n0 and if
n
limn→∞ ξk = ξk ∀ k = 0, 1, 2, . . ., then limn→∞ kξ n − ξkℓ2 = 0.
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
225
For the determination of the limit operators W 3/4 (Mτn Bk± Ln ), we need the well known
relations
SσTj = −iUj−1 ,
(7.9)
S pej = iRj ,
j = 0, 1, 2, . . . ,
U−1 := 0 .
L EMMA 7.7. Let j ≥ 0 be fixed and τ ∈ {σ, µ}. Then,
q
n
1
(7.10)
lim 2 + xτn−j,n − (2 + xτn−j,n )2 − 1 = e−(j+ 2 )π .
n→∞
Moreover,
(7.11)
2 + xτjn −
q
(2 + xτjn )2 − 1
ℓ
≤ e−ℓ+(j− 2 ) n ,
ℓ
1
1 ≤ j ≤ n, n, ℓ ∈ N.
Proof. Set
γn = γnτ := 1 + xτn−j,n =
2 sin2
j+ 12
2n
π
: τ = σ,
j+ 1
2 sin2 2 n+21 π
( 2)
: τ = µ.
Then,
q
n n
p
2 + xτn−j,n − (2 + xτn−j,n )2 − 1 = 1 + γn − (1 + γn )2 − 1 =
where δn = γn +
p
(1 + γn )2 − 1, limn→∞ nδn = j +
1
2
1
,
(1 + δn )n
π, and
h
inδn
1
1
(1 + δn )n = (1 + δn ) δn
−→ e(j+ 2 )π .
This proves (7.10). For the second relation we define the mapping h : [0, π] −→ R by
p
2 + cos s − (2 + cos s)2 − 1
1
1
=:
h(s) =
= s
.
s
p
f
(s)
eπ
2
e π 2 + cos s + (2 + cos s) − 1
We show that f (s) ≥ e for s ∈ [0, π]. Indeed, since
s
p
s
eπ ′
2 + cos s + (2 + cos s)2 − 1 + e π
f (s) =
π
(2 + cos s) sin s
− sin s − p
(2 + cos s)2 − 1
!
sin s
1
−p
,
π
(2 + cos s)2 − 1
p
s
= e π (2 + cos s + (2 + cos s)2 − 1
we have f ′ (s) = 0 if and only if s = s∗ ∈ (0, π) such that
It follows that
f (s∗ ) = g(s∗ )
p
(2 + cos s∗ )2 − 1 = π sin s∗ .
s
with g(s) = e π (2 + cos s + π sin s) .
Now,
′
g (s) = e
s
π
2
+
π
!
1
+ π cos s = 0
π
ETNA
Kent State University
http://etna.math.kent.edu
226
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
2
if and only if s = s0 ∈ (0, π) such that cos s0 = − 1+π
2 . Hence,
g(s0 ) = e
s0
π
s0
=eπ
s0
≥eπ
2
2−
+π
1 + π2
s
4
1−
(1 + π 2 )2
!
2π 2
π p
2 )2 − 4
(1
+
π
+
1 + π2
1 + π2
"
#
π π + π3
2π 2
> e.
+
1 + π2
1 + π2
Together with g(0) = 3 > e and g(π) = e, √
we get g(s) ≥ e for s ∈ [0, π]. This implies
f (s∗ ) ≥ e, which, together with f (0) = 3 + 8 > e and f (π) = e, yields f (s) ≥ e for all
s ∈ [0, π]. Using this result we conclude that
2 + xσjn −
q
ℓ
(2 + xσjn )2 − 1
≤ e−ℓ ,
e(j− 2 ) n
1
ℓ
which proves the second relation. The case τ = µ can be treated in the same way.
Since
1
2 sin2 j− 2 π
: τ = σ,
2n
1 − xτjn =
jπ
2
2 sin
: τ = µ,
2(n+ 12 )
one can analogously prove the following lemma.
L EMMA 7.8. Let j ≥ 1 be fixed and τ ∈ {σ, µ}. Then,
(
1
q
n
e−(j− 2 )π
τ
(7.12)
lim 2 − xjn − (2 − xτjn )2 − 1 =
n→∞
e−jπ
: τ = σ,
: τ = µ.
Moreover,
(7.13)
2 − xτjn −
q
(2 − xτjn )2 − 1
ℓ
≤ e−(j− 2 ) n ,
1
ℓ
1 ≤ j ≤ n, n, ℓ ∈ N.
For k ∈ N, a, b ∈ C, and b 6= a, it follows from the formula
bk − ak = (b − a)
k
X
ak−s bs−1
s=1
by dividing by ak bk (a − b) that
1
1
= k
k
(a − b)a
b
k
X bs−1
1
−
a − b s=1 as
!
.
In case a = y + x ± 2 and b = x0 + x ± 2, we conclude
"
#
k
X
1
1
(x0 + x ± 2)t−1
1
.
=
−
(7.14)
(y − x0 )(y + x ± 2)k
(x0 + x ± 2)k y − x0 t=1 (y + x ± 2)t
ETNA
Kent State University
http://etna.math.kent.edu
227
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
L EMMA 7.9. For τ ∈ {σ, µ} and k0 ∈ N, the strong limits
W 3 (Mτn Bk−0 Ln ) = Θ
and
W 3 (Mτn Bk+0 Ln ) =
exist, where Θ is the zero operator in ℓ2 and where
aσjk
aτjk
∞
j,k=0
2k0 −2
2 (−1)k0 k + 12 j + 12
=
h
2
2 i k 0
πi
k + 21 + j + 21
2k0 −2t+1
k0
X
2 (−1)k0 −t j + 21
− (−1) e
h
2
2 ik0 −t+1
πi
t=1
k + 21 + j + 21
"
#l−s
l−1
t−1 X
j + 21 π
1
t − 1 X χt−l−2 χls
√
·
t
,
t−1− l−s
(t − 1)!
l
2
2
s=0 2
k −(j+ 12 )π
l=0
aµjk =
2 (−1)k0 (k + 1)(j + 1)2k0 −2
πi [(k + 1)2 + (j + 1)2 ]k0
k0
X
2 (−1)k0 −t (k + 1)(j + 1)2k0 −2t
πi [(k + 1)2 + (j + 1)2 ]k0 −t
t=1
t−1−s
t−2
X
1
(j + 1)π
χt−1
s
√
·
,
(t − 1)! s=0 2 t−1+s
2
2
+ (−1)k e−(j+1)π
with certain real numbers χt and χts . Moreover, the respective sequences of the adjoint
operators converge strongly.
(3)
(3) (3)
Proof. We have to show that the sequence En Mτn Bk−0 Ln (En )−1 Ln converges
∞
strongly to Θ in ℓ2 . For that, we investigate the convergence at the elements em = (δj,m )j=0 ,
2
m = 0, 1, 2, . . . , of the standard basis of ℓ . For n > m ≥ 0, we can write
τ −1
τ
τ −
P n em
En(3) Mτn Bk−0 Ln (En(3) )−1 L(3)
n em = Vn Mn Bk0 Ln (Vn )
#n
" s
1 + xτjn
=
(xτ )
B − ℓeτ
1 + xτm+1,n k0 m+1,n jn
,
j=1
n
∈ Cn is identified with (ξ0 , . . . , ξn−1 , 0, . . . ) ∈ ℓ2 . Let us consider the
case τ = σ. For k0 ∈ N fixed, we compute Bk−0 ℓeσkn (xσjn ), j, k = 1, . . . , n. Using, for n ≥ 1,
where
ξj−1
j=1
Tn′ (xσkn )
=
r
2 n(−1)k+1
π ϕ(xσkn )
and
1
π
Z
1
−1
1−y
1
σ(y)Tn (y) dy =
y−x
π
Z
1
−1
1 − x − (y − x)
σ(y)Tn (y) dy = (1 − x)Un−1 (x),
y−x
− 1 < x < 1,
ETNA
Kent State University
http://etna.math.kent.edu
228
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
we find by applying equation (7.14)
Z
ν(xσkn ) 1 1 (1 ∓ x)k0 −1 µ(y)Tn (y)
dy
Tn′ (xσkn ) πi −1 (y − xσkn )(y + x ∓ 2)k0
r
Z
π (−1)k+1
1 1 (1 ∓ x)k0 −1 µ(y)Tn (y)
σ
σ
dy
=
ϕ(xkn )ν(xkn )
2
n
πi −1 (y − xσkn )(y + x ∓ 2)k0
"
r
Z
1 + xσkn
1 1 (1 ∓ x)k0 −1 µ(y)Tn (y)
π (−1)k+1
dy
=
2
n
(xσkn + x ∓ 2)k0 πi −1
y − xσkn
#
Z 1
k0
X
(1 ∓ x)k0 −1 µ(y)Tn (y)
σ
t−1 1
(xkn + x ∓ 2)
−
dy
πi −1
(y + x ∓ 2)t
t=1
"
r
1 + xσkn
π (−1)k+1
(1 ∓ x)k0 −1 (1 − xσkn )Un−1 (xσkn )
=
2
ni
(xσkn + x ∓ 2)k0
#
Z 1
k0
X
(1 ∓ x)t−1 µ(y)Tn (y)
σ
t−1
k0 −t 1
dy .
(xkn + x ∓ 2) (1 ∓ x)
−
π −1
(y + x ∓ 2)t
t=1
Bk±0 ℓeσkn (x) =
Thus, since Un−1 (xσkn ) = (−1)k+1
q
2
π
σ(xσkn ),
1 ϕ(xσkn )(1 ∓ x)k0 −1
−
=
ni (xσkn + x ∓ 2)k0
Bk±0 ℓeσkn (x)
·
k0
X
t=1
r
1 + xσkn
π (−1)k+1
σ
2
n
(xkn + x ∓ 2)k0
(xσkn + x ∓ 2)t−1 (1 ∓ x)k0 −t (−1)t−1 e
htn (−x ± 2).
It follows that
s
1 + xσjn ± σ σ
B ℓe (x )
1 + xσkn k0 kn jn
q
q
q
q
r
σ
σ (1 ∓ xσ )k0 −1
σ
σ
1
−
x
1
+
x
1
+
x
k+1
jn
jn
jn 1 + xkn
kn
1
π (−1)
=
−
ni
(xσkn + xσjn ∓ 2)k0
2
n
(xσkn + xσjn ∓ 2)k0
k0
X
(xσkn + xσjn ∓ 2)t−1 (1 ∓ xσjn )k0 −t (−1)t−1 e
htn (−xσjn ± 2)
·
(7.15)
t=1
1
=
ni
q
1 − xσkn
q
1 + xσjn
xσkn + xσjn ∓ 2
·
k0
X
t=1
(1 ∓ xσjn )k0 −1
−
(xσkn + xσjn ∓ 2)k0 −1
r
p
1 + xσkn
π (−1)k+1
σ
2
n
xkn + xσjn ∓ 2
q
(1 ∓ xσjn )k0 −t
1 + xσjn (−1)t−1 e
htn (−xσjn ± 2) .
(xσkn + xσjn ∓ 2)k0 −t
Now we consider τ = µ. For the determination of Bk±0 ℓeµkn (xµjn ), j, k = 1, . . . , n, we need
Pn′ (xµkn )
=
r
2 n + 21 (−1)k+1
q
π ϕ(xµkn ) 1 − xµ
kn
and
Rn (xµkn )
=
r
2 (−1)k
q
.
π 1 + xµ
kn
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
229
We have
Z
ν(xµkn ) 1 1 (1 ∓ x)k0 −1 µ(y)Pn (y)
dy
Pn′ (xµkn ) πi −1 (y − xµkn )(y + x ∓ 2)k0
q
r (−1)k+1 ν(xµ )ϕ(xµ ) 1 − xµ
Z 1
(1 ∓ x)k0 −1 µ(y)Pn (y)
π
kn
kn
kn 1
dy
=
1
2
πi −1 (y − xµkn )(y + x ∓ 2)k0
n+ 2
q
r
µ
µ "
Z 1
k+1 (1 + x ) 1 − x
(1 ∓ x)k0 −1 µ(y)Pn (y)
1
π (−1)
kn
kn
=
dy
µ
1
k
2 n+ 2
(xkn + x ∓ 2) 0
πi −1
y − xµkn
#
Z 1
k0
X
(1 ∓ x)k0 −1 µ(y)Pn (y)
µ
t−1 1
dy
(xkn + x ∓ 2)
−
πi −1
(y + x ∓ 2)t
t=1
q
r
µ "
µ
k (1 + x ) 1 − x
π (−1)
kn
kn
(7.9)
(1 ∓ x)k0 −1 Rn (xµkn )
µ
1
k
0
2
(x
+
x
∓
2)
n+ 2 i
=
kn
#
Z 1
k0
X
(1 ∓ x)t−1 µ(y)Pn (y)
µ
t−1
k0 −t 1
dy
(xkn + x ∓ 2) (1 ∓ x)
+
π −1
(y + x ∓ 2)t
t=1
q
r
µ
µ
ϕ(xµkn )(1 ∓ x)k0 −1
1
π (−1)k (1 + xkn ) 1 − xkn
+
=
µ
2 n + 21
xµkn + x ∓ 2
n + 12 i (xkn + x ∓ 2)k0
Z
k0
X
1 1 (1 ∓ x)t−1 µ(y)Pn (y)
(xµkn + x ∓ 2)t−1 (1 ∓ x)k0 −t
·
dy .
iπ −1
(y + x ∓ 2)t
t=1
Bk±0 ℓeµkn (x) =
Thus,
s
(7.16)
1 + xµjn ± µ µ
B ℓe (x )
1 + xµkn k0 kn jn
q
q
1 − xµkn 1 + xµjn (1 ∓ xµjn )k0 −1
1
=
(xµkn + xµjn ∓ 2)k0
n + 21 i
q
r
1 + xµjn ϕ(xµkn )
π (−1)k
+
2 n + 21 (xµkn + xµjn ∓ 2)k0
k0
X
(xµkn + xµjn ∓ 2)t−1 (1 ∓ xµjn )k0 −t (−1)t−1 htn (−xµjn ± 2)
·
t=1
q
q
1 + xµjn
(1 ∓ xµjn )k0 −1
1
=
µ
µ
µ
µ
n + 21 i xkn + xjn ∓ 2 (xkn + xjn ∓ 2)k0 −1
r
ϕ(xµkn )
π (−1)k
+
µ
2 n + 21 xkn + xµjn ∓ 2
·
k0
X
t=1
1 − xµkn
q
(1 ∓ xµjn )k0 −t
1 + xµjn (−1)t−1 htn (−xµjn ± 2) .
(xµkn + xµjn ∓ 2)k0 −t
ETNA
Kent State University
http://etna.math.kent.edu
230
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
Let −1 < x < 1. By (7.6) we have
t
hn (−x − 2)
r
l−1
t−1 x+3X
l−s
t − 1 X pt−l−2 (−x − 2) pls (−x − 2) l−s
n (x + 1) 2
≤ const
l−s
t−1−
x+1
l
2
(x + 3)
s=0
l=0
t−2 t−1
n
X
p
t−1−s ps (−x − 2) t−1−s
−
(x + 1) 2 x + 2 − (x + 2)2 − 1
t−1+s n
2
s=0 (x + 3)
#
"
t−2
l−1
t−1 X
X
X
t−1−s
l−s
1
t−1−s
l−s
n
(x + 1) 2
n (x + 1) 2 +
≤ const √
x + 1 l=0 s=0
s=0
n
p
· x + 2 − (x + 2)2 − 1 .
Estimate (7.11) leads to
q
1 + xτjn htm (−xτjn − 2)
#
" t−1 l−1
t−2
q
XX
X
l−s
t−1−s
l−s τ
t−1−s
τ
τ
≤ const
m (xjn + 1) 2 + 1 + xjn
m
(xjn + 1) 2
l=0 s=0
(7.17)
where we used
(7.18)
s=0
q
m
· 2 + xτjn − (2 + xτjn )2 − 1
" t−1 l−1
l−s
XX
n+1−j
l−s
≤ const
m
n
l=0 s=0
t−s #
t−2
1 m
n + 1 − j X t−1−s n + 1 − j
+
e−m+(j+ 2 ) n ,
m
n
n
s=0
q
1 + xτjn ≤ const n+1−j
. Consequently,
n
q
1 + xτjn htn (−xτjn − 2)
" t−1 l−1
#
t−2
XX
1X
l−s
t−s
≤ const
(n + 1 − j)
+
(n + 1 − j)
e−n+j
n
s=0
s=0
l=0
≤ const(n + 1 − j)t−1 e−n+j ≤ const,
j = 1, . . . , n.
Analogously, one can show that
q
htn (−xτjn − 2) ≤ const(n + 1 − j)t−1 e−n+j ≤ const,
(7.19)
1 + xτjn e
j = 1, . . . , n, as well as
et
hn (−xτjn + 2) ≤ const j t−1 e−j ≤ const,
q
(7.20)
τ
1 − xjn (7.21)
t
hn (−xτjn + 2) ≤ const j t−1 e−j ≤ const,
j = 1, . . . , n,
j = 1, . . . , n.
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
Thus, for fixed m ∈ N0 , the terms in (7.16) without the factor
1
n+ 12
are bounded and
s
1 + xτjn
1
1
− eτ
τ Bk0 ℓm+1,n (xjn ) ≤ const ≤ const ,
τ
1 + xm+1,n
n
j
j = 1, . . . , n.
With the help of Lemma 7.6, we obtain W 3 (Mτn Bk−0 Ln ) = Θ.
Now, we turn to the sequences (Mτn Bk+0 Ln ). Defining
(n)
sejk :=
q
1 − xτjn
1
ni 2 − xτkn − xτjn
(n)
and ebjk :=
1 − xτjn
,
2 − xτkn − xτjn
we have, for fixed j, k ≥ 1,
(n)
lim sejk
(7.22)
n→∞
and
(n)
lim ebjk
(7.23)
n→∞
√
2
=
πi
j − 21
2
2
k − 12 + j − 12
j
k2 + j 2
2
j − 21
2
2
k − 12 + j − 12
=
j2
2
k + j2
: τ = σ,
: τ = µ,
: τ = σ,
: τ = µ.
Furthermore,
q
1
lim n 1 − xτjn = √
n→∞
2
(
j−
jπ
1
2
π
: τ = σ,
: τ = µ.
With the help of (7.15), we obtain
s
1 + xσjn + σ σ
B ℓe (x )
1 + xσkn k0 kn jn
ik0 −1 (−1)k+1 p1 + xσ
h
q
(n)
kn
k0 −1 e(n)
σ
bjk
+
= −e
skj 1 + xjn (−1)
ni
2 − xσkn − xσjn
·
k0
X
t=1
ik −t q
h
(n) 0
htn (2 − xσjn ),
1 + xσjn (−1)t−1 cn e
(−1)k0 −t ebjk
231
ETNA
Kent State University
http://etna.math.kent.edu
232
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
where, in view of (7.8) and (7.12),
htn (2 − xσjn )
cn e
n(2 − xσkn − xσjn )
q
n
1
1
(−1)t−1 q
2 − xσjn − (2 − xσjn )2 − 1 q
=
(t − 1)!
σ
3 − xjn n 1 − xσjn
l−1
t−1 l−s
X
t − 1 X pt−l−2 (2 − xσjn )pls (2 − xσjn ) q
σ
n
1
−
x
l−s
jn
l
(3 − xσjn )t−1− 2
s=0
l=0
2
j − 12
1
(−1)t−1 −(j− 21 )π
−→
e
(t − 1)!
j − 21 π k − 1 2 + j − 1 2
2
2
"
#l−s
l−1
t−1 X
j − 12 π
t − 1 X χt−l−2 χls
√
·
.
t−1− l−s
l
2
2
s=0 2
l=0
(n)
· ebjk
Together with (7.22) and (7.23), this leads to
s
1 + xσjn + σ σ
B ℓe (x ) = aσj−1,k−1 ,
lim
n→∞
1 + xσkn k0 kn jn
j, k ≥ 1.
In case τ = µ we have, due to (7.16),
s
1 + xµjn + µ µ
B ℓe (x )
1 + xµkn k0 kn jn
r
ik0 −1 q
h
ϕ(xµkn )
π (−1)k n
n
µ
k0 (n) e(n)
b
s
e
(−1)
1
+
x
−
=
jn
jk
kj
2 n + 21 n(2 − xµkn − xµjn )
n + 21
k0
ik −t q
h
X
(n) 0
(−1)k0 −t ebjk
·
1 + xµjn (−1)t−1 htn (2 − xµjn ),
t=1
where, taking into account (7.6) and (7.12),
htn (2 − xµjn )
(−1)t−1
=√
πi(t − 1)!
"s
t−1 1 − xµjn X
t−1
·
3 − xµjn
l
l=0
l−s
pt−l−2 (2 − xµjn )pls (2 − xµjn ) q
µ
n
1
−
x
l−s
jn
(3 − xµjn )t−1− 2
s=0
#
µ
t−2
q
q
t−1−s n
X
pt−1
s (2 − xjn )
µ
µ
µ 2
1
−
x
(2
−
x
n
−
2
−
x
−
)
−
1
t−1+s
jn
jn
jn
µ
2
s=0 (3 − xjn )
t−2
X pt−1 (1) jπ t−1−s
(−1)t
s
√
√
e−jπ .
−→
(t − 1)! πi s=0 2 t−1+s
2
2
·
l−1
X
Consequently,
lim
n→∞
s
1 + xµjn + µ µ
B ℓe (x ) = aµj−1,k−1 ,
1 + xµkn k0 kn jn
j, k ≥ 1.
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
233
With the help of Lemma 7.12, equation (7.13), and equations (7.20), (7.21), one can show
that (cf. the end of the proof of Lemma 7.10)
s
1 + xτ
const
jn
+ eτ
τ ℓ
(x
)
B
,
≤
1 + xτkn k0 kn jn j
1 ≤ j ≤ n.
∞
Now, Lemma 7.6 yields W 3 (Mτn Bk+0 Ln ) = aτjk j,k=0 . The convergence of the sequences
of the adjoint operators can be seen analogously.
L EMMA 7.10. Let τ ∈ {σ, µ} and k0 ∈ N. Then,
W 4 (Mτn Bk−0 Ln ) =
where
ajk
2
=
h
πi
k+
j+
1 2
2
ajk
∞
j,k=0
and
W 4 (Mτn Bk+0 Ln ) = Θ,
1 2k0 −1
2
+ j+
1
+ (−1)k e−(j+ 2 )π
ik0
1 2
2
k0
X
2
h
πi
t=1
2k0 −2t
k + 21 j + 12
2
2 ik0 −t+1
k + 21 + j + 21
"
#l−s
l−1
t−1 X
j + 21 π
1
t − 1 X χt−l−2 χls
√
,
t
·
t−1− l−s
(t − 1)!
l
2
2
s=0 2
l=0
with certain real numbers χt and χts and where also the respective sequences of the respective
adjoint operators converge strongly.
(4)
(4)
(4)
Proof. Again, we have to check the convergence of En Mτn Bk−0 Ln (En )−1 Ln
at
the elements em , m = 0, 1, 2, . . . , of the standard basis of ℓ2 . For n > m ≥ 0, we can write
e τ −1 Pn em
eτ τ −
En(4) Mτn Bk−0 Ln (En(4) )−1 L(4)
n em = V n M n B k 0 Ln ( V n )
"s
#n−1
1 + xτn−j,n − τ
τ
=
.
(x
)
B ℓe
1 + xτn−m,n k0 n−m,n n−j,n
j=0
Let j, k be fixed. Define
(n)
sjk
(7.24)
q
τ
1 + xjn
1
:=
ni xτkn + xτjn + 2
j− 1
cos 2n2 π
1
1
2 k− 2
2 j− 2
1 1 cos 2n π + cos 2n π
√
=
j
ni 2
cos 2(n+
1 π
2)
j
cos2 k 1 π + cos2
π
2(n+ )
2(n+ 1 )
2
2
: τ = σ,
: τ = µ.
ETNA
Kent State University
http://etna.math.kent.edu
234
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
Thus, we have
(n)
sn−j,n−k
2
1 1 sin
√
=
ni 2
sin2
sin
k+ 21
2n
j+ 21
2n
π
j+ 21
2n
π + sin2
: τ = σ,
π
j+ 1
sin 2(n+21 ) π
2
k+ 21
π
2(n+ 21 )
+ sin2
j+ 12
π
2(n+ 21 )
: τ = µ.
(n)
We obtain convergence of sn−j,n−k ,
j + 21
1 2
(n)
sn−j,n−k −→ √
,
1
2 πi (k + 2 )2 + (j + 12 )2
(7.25)
For n ≥ 1, we set
(n)
bjk
(7.26)
:=
1 + xτjn
xτkn + xτjn +
2
and get
(n)
bn−j,n−k −→
=
cos2
cos2
cos2
k− 21
2n
n −→ ∞,
j− 12
2n
π
π + cos2
cos2
j− 21
2n
: τ = σ,
π
j
π
2(n+ 21 )
k
π
2(n+ 21 )
+ cos2
(j + 21 )2
,
(k +
+ (j + 12 )2
1 2
2)
τ ∈ {σ, µ}.
j
π
2(n+ 21 )
: τ = µ,
n −→ ∞.
Moreover,
n
(7.27)
q
1 + xτn−j,n −→
(j + 21 )π
√
,
2
n −→ ∞.
For τ = σ, equation (7.8) leads to
q
htn (−xσn−j,n − 2)
1 + xσn−j,n cn e
q
n q
(−1)t−1 2 + xσn−j,n − (2 + xσn−j,n )2 − 1
=
xσn−j,n + 3
(t − 1)!
l−1
t−1 X
l−s
t − 1 X pt−l−2 (−xσn−j,n − 2)pls (−xσn−j,n − 2) l−s σ
n (xn−j,n + 1) 2 .
·
l−s
t−1−
σ
l
2
(xn−j,n + 3)
s=0
l=0
(−1)n
Hence, by (7.10) we have
(−1)n+t−1
q
htn (−xσn−j,n − 2)
1 + xσn−j,n cn e
"
#l−s
l−1
t−1 2 −(j+ 1 )π X t − 1 X pt−l−2 (−1) pls (−1) j + 12 π
2
√
.
e
−→
l−s
(t − 1)!
l
2
2t−1− 2
s=0
l=0
√
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
235
Since, due to (7.15),
s
1 + xσn−j,n − σ
(xσ
)
B ℓe
1 + xσn−k,n k0 n−k,n n−j,n
q
(n)
k0 −1
(n)
= 1 − xσn−k,n sn−j,n−k bn−j,n−k
(7.28)
(n)
+ (−1)k sn−k,n−j
· (−1)
n+t−1
q
k0
X
(n)
bn−j,n−k
t=1
k0 −t
1 + xσn−j,n cn e
htn (−xσn−j,n − 2),
we obtain, together with (7.25) and (7.27), the convergence result
s
1 + xσn−j,n − σ
(xσ
)
B ℓe
1 + xσn−k,n k0 n−k,n n−j,n
−→
k0
X
(j + 12 )2k0 −1
(k + 21 )(j + 21 )2k0 −2t
2
2
k −(j+ 12 )π
+
(−1)
e
πi [(k + 21 )2 + (j + 12 )2 ]k0
πi (k + 1 )2 + (j + 1 )2 k0 −t+1
t=1
2
2
l−s
l−1
t−1 X
t − 1 X pt−l−2 (−1) pls (−1) (j + 12 )π
1
√
,
·
l−s
(t − 1)!
l
2
2t−1− 2
s=0
l=0
for j, k fixed and n tending to infinity. For the case τ = µ, we have due to (7.16)
s
1 + xµn−j,n − µ
(xµ
)
B ℓe
1 + xµn−k,n k0 n−k,n n−j,n
q
(n)
k0 −1
n
(n)
= 1 − xµn−k,n
1 sn−j,n−k bn−j,n−k
n+ 2
(7.29)
r k0
q
k0 −t
π X (n)
(−1)k n (n)
µ
s
1
−
x
bn−j,n−k
+
n−k,n−j
n−k,n
1
2
n+ 2
t=1
q
µ
µ
n+t−1
t
1 + xn−j,n hn (−xn−j,n − 2).
· (−1)
So we easily derive that
s
1 + xµn−j,n − µ
B ℓe
(xµ
) −→ ajk ,
1 + xµn−k,n k0 n−k,n n−j,n
n −→ ∞.
Let k ≥ 0 be fixed and n > k. In view of Lemma 7.11, we have
√
j + 12
2
const
j+1
(n)
≤
,
|sn−j,n−k | ≤
+
const
1
1
2
2
2
π (k + 2 ) + (j + 2 )
n
j+1
as well as
1
1
(n)
|sn−k,n−j | ≤ √
2π j +
1
2
+ const
k+1
n2
≤
const
,
j+1
0≤j<n
0 ≤ j < n.
Moreover, due to the estimates (7.18) and (7.19),
q
q
htn (−xσn−j,n − 2) ≤ const, 1 + xµn−j,n htn (−xµn−j,n − 2) ≤ const,
1 + xσn−j,n e
ETNA
Kent State University
http://etna.math.kent.edu
236
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
for 0 ≤ j < n. With the help of (7.28) and (7.29) as well as
p
1 − xn−k,n ≤ const
p
n+1−k
,
n
1 + xn−k,n ≤ const
k
,
n
|bn−j,n−k | ≤
const
,
j
we arrive at
s
const
1 + xτ
n−j,n − eτ
τ
ℓ
(x
)
B
,
≤
1 + xτn−k,n k0 n−k,n n−j,n j + 1
Applying Lemma 7.6, we obtain W 4 (Mτn Bk−0 Ln ) =
ajk
j = 0, . . . , n − 1.
∞
.
j,k=0
The proof of W 4 (Mτn Bk+0 Ln ) = Θ can be performed in the same way as the proof of
W (Mτn Bk−0 Ln ) = Θ; cf. the proof of Lemma 7.9. The convergence of the sequences of the
adjoint operators can be seen analogously.
3
(n)
Let n ∈ N. In what follows, we study the asymptotic behavior of the values sjk defined
in (7.24).
L EMMA 7.11. Let d be fixed with 0 < d < 1. For n −→ ∞, we have
(n)
sjk
(7.30)
=
(
O
O
n+1−j
n2
1
n
: k ≤ d n, j ≥ 1
: k ≥ 1, j ≤ d n
and
(7.31)
(n)
sjk
1 2
=√
2 πi (n +
1
2
n + 21 − j
− j)2 + (n +
1
2
− k)2
+O
n+1−j
n2
,
1 ≤ j, k ≤ n,
where the constants regarding the O-terms are bounded by a constant which is independent
of j, k, and n.
Proof. We prove the assertion only for τ = σ. The proof for the other case is analogous.
Define
g1 : [0, 1) −→ R,
s 7→
cos πs
2
.
1−s
Since this mapping is bounded and positive, we get
(7.32)
q
1 + xσjn =
√
2 cos
j− 21
2n
π=
√
2 g1
j− 12
n
1−
j− 12
n
≤ const
Thus, we easily derive (7.30). Define the mapping
h π i2
−→ R,
g2 : 0,
2
(s, t) 7→
1
1
sin s
−
.
s sin2 s + sin2 t s2 + t2
n−j+1
n
.
ETNA
Kent State University
http://etna.math.kent.edu
237
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
One can show that this mapping is bounded. Thus,
j+ 1
(n)
sn−j,n−k
sin 2n2 π
1 1
√
=
ni 2 sin2 k+ 21 π + sin2 j+ 12 π
2n
2n
1 j+ 2
2n π
1
1
√ 1 2 1 2
=
ni
j+ 2
k+ 2
2
π +
π
2n
+
2n
sin
j+ 21
2n
k+ 1
sin2 2n2
π
j+ 1
π/ 2n2 π
j+ 1
+ sin2 2n2
π
−
k+ 21
2n
1
j + 21
1 2
j+ 21
k+ 2
π,
π
=√
+
g
2
2n
2n
2 πi (k + 12 )2 + (j + 12 )2
π
2
1
+
j+ 21
2n
π
ni
j+ 21
2n
π
1
√ .
2
2
Replacing j and k by n − j and n − k, respectively, we get (7.31).
Analogously, we can prove the following lemma.
L EMMA 7.12. Let d be fixed with 0 < d ≤ 1. For n −→ ∞, we have
(n)
sejk
=
(
O
O
1
n2
1
n
: k ≥ d n, j ≥ 1,
: k ≥ 1, j ≥ d n
and
(n)
sejk
=
√1
2
√1
2
j− 12
2
πi (j− 21 )2 +(k− 12 )2 +
j
j
2
πi j 2 +k2 + O n2
O
j
n2
: τ = σ,
: τ = µ,
1 ≤ j, k ≤ n,
where the constants regarding the O-terms are bounded by a constant which is independent
of j, k, and n.
L EMMA 7.13 (Satz III.5.1 in [6]). Let ϑ(x) = (1 − x)γ (1 + x)δ with γ, δ > −1. If
f ∈ R satisfies
|f (x)| ≤ const(1 − x)ε−
1+γ
2
(1 + x)ε−
1+δ
2
,
−1 < x < 1,
for some ε > 0, then limn→∞ Lϑn f − f ϑ = 0.
L EMMA 7.14. Let τ ∈ {σ, µ} and k0 ∈ N. Then, W 2 (Mτn Bk±0 Ln ) = Θ, where Θ is the
zero operator in L2ν and where also the sequences of the adjoint operators converge strongly.
Proof. Let k0 ∈ N. It suffices to show convergence on a dense subset. With the help of
ETNA
Kent State University
http://etna.math.kent.edu
238
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
equation (7.17) and the Gaussian quadrature rule, we derive, for fixed m < n,
Wn Mσn B − Ln Wn pem 2
k0
ν
2
2 √
2 σ −
σ −
= Mn Bk0 pen−1−m ν = Ln νBk0 pen−1−m µ = 1 − xLσn νBk−0 pen−1−m σ
n
n
2
2
πX
πX
0
(−2 − xσjn )
=
(1 + xσjn ) Bk−0 pen−1−m (xσjn ) =
(1 + xσjn ) hkn−1−m
n j=1
n j=1
"
l−s
k0 −1 X
n
l−1
πX X
n+1−j
l−s
≤ const
(n − 1 − m)
n j=1
n
l=0 s=0
k0 −s #2
kX
0 −2
n−1−m
n
+
1
−
j
e−2(n−1−m)+(2j−1) n
(n − 1 − m)k0 −1−s
+
n
s=0
n
πX
(n + 1 − j)2k0 −2 e−2(n−j) −→ 0 for
n j=1
≤ const
In the last step we used the fact that the sequence
n
X
j=1
n −→ ∞.
j p xj , is convergent for any p ∈ N0 and
|x| < 1. Using (7.21) and (7.13) for Bk+0 , we easily derive
n
X
2
Wn Mσn B + Ln Wn pem 2 = π
(1 + xσjn ) Bk+0 pen−1−m (xσjn )
k0
ν
n j=1
≤
n
2
2π X k0
hn−1−m (2 − xσjn )
n j=1
n
≤ const
π X 2k0 −2 −2j
j
e
−→ 0 for
n j=1
n −→ ∞.
The case τ = µ can be treated in the same way.
Let us turn to the convergence of the adjoint operators. Let f ∈ C[−1, 1] be vanishing
in a neighborhood of ±1. Set fe = J1−1 f , where J1 is the isometry from (3.1). The set of
such functions fe is dense in L2ν . Now we choose a smooth function χ : [−1, 1] −→ C which
vanishes in a neighborhood of ±1 such that χf = f . Since
τ ±
Mn χB Ln − Ln χB ± Ln −→ 0
k
k
ν
holds (cf. the proof of Lemma 7.3), convergence of
(7.33)
Wn (Mτn Bk± Ln )∗ Mτn χLn Wn fe = Wn (Mτn Bk± Ln )∗ (Mτn χLn )∗ Wn fe
= Wn (Mτ χLn Mτ B ± Ln )∗ Wn fe
n
is equivalent to
n
k
= Wn (Mτn χBk± Ln )∗ Wn fe −→ 0
Wn (Ln χBk± Ln )∗ Wn fe = Wn χBk±
∗
Wn fe −→ 0 in L2ν .
in L2ν
ETNA
Kent State University
http://etna.math.kent.edu
239
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
But this convergence takes place since Wn tends weakly to zero and χBk± : L2ν −→ L2ν is
compact. Taking into account Lemma 7.13 , the relation
Wn Mσn χLn Wn = J1−1 Lσn χJ1
(cf. [10, (3.19)]), and the above convergence result, we derive
Wn (Mσn Bk± Ln )∗ Mσn χLn Wn fe − Wn (Mσn Bk± Ln )∗ Wn fe
ν
= Wn (Mσn Bk± Ln )∗ Wn Wn Mσn χLn Wn fe − Wn (Mσn Bk± Ln )∗ Wn fe
≤ const Wn Mσn χLn Wn fe − fe = const J1−1 Lσn χf − J1−1 f ν
ν
ν
=
const kLσn f
− f kν ≤
const kLσn f
− f kσ −→ 0.
This implies together with convergence in (7.33) that Wn (Mσn Bk± Ln )∗ Wn −→ 0 in L2ν . In
case of nodes of the fourth kind, we use the formula
√
1
Wn Mµn χLn Wn = J2−1 1 − x Lσn √
χJ2
1−x
(cf. [10, (3.20)]) and Lemma 7.2. We get
Wn (Mµn Bk± Ln )∗ Mµn χLn Wn fe − Wn (Mµn Bk± Ln )∗ Wn fe
ν
√
√
1
1
µ
µ
f − f = const 1 + x Mn √
f − f
≤ const 1 − x Ln √
1−x
1+x
ν
ν
µ f
f ≤ const Mn √1 + x − √1 + x −→ 0.
ν
This completes the proof.
For k0 ∈ N and τ ∈ {σ, µ}, we define, in accordance with Lemma 7.9 and Lemma 7.10,
∞
∞
the matrices Kτk0 := dτjk j,k=0 and Kk0 := djk j,k=0 by
1
dσjk = −(−1)k e−(j+ 2 )π
(7.34)
"
#l−s
l−1
t−1 X
t − 1 X χt−l−2 χls j + 21 π
1
√
,
·
t−1− l−s
(t − 1)!
l
2
2
s=0 2
l=0
dµjk
(7.35)
2k0 −2t+1
k0
X
2 (−1)k0 −t j + 21
h
2
2 ik0 −t+1
πi
t=1
k + 21 + j + 12
k −(j+1)π
= (−1) e
k0
X
2 (−1)k0 −t (k + 1)(j + 1)2k0 −2t
πi [(k + 1)2 + (j + 1)2 ]k0 −t
t=1
t−2
·
X χt−1
1
s
(t − 1)! s=0 2 t−1+s
2
(j + 1)π
√
2
t−1−s
,
ETNA
Kent State University
http://etna.math.kent.edu
240
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
and
k −(j+ 21 )π
djk = (−1) e
(7.36)
k0
X
2
h
πi
t=1
2k0 −2t
k + 21 j + 12
2
2 ik0 −t+1
k + 21 + j + 12
"
#l−s
l−1
t−1 X
t − 1 X χt−l−2 χls j + 21 π
1
√
.
·
t−1− l−s
(t − 1)!
l
2
2
s=0 2
l=0
L EMMA 7.15. The operators Kτk0 , Kk0 : ℓ2 −→ ℓ2 , k0 ∈ N, τ ∈ {σ, µ}, are compact.
Proof. We consider only Kk0 . The proof for Kτk0 is completely analogous. The estimates
|djk | ≤ const e−jπ
k0
X
t=1
k + 12
(j + 21 )2k0 −2t (j + 12 )k0
(k + 12 )2 + (j + 12 )2 (k + 1 )2 + (j + 1 )2 k0 −t
2
2
e−jπ (j + 21 )k0
≤ const
k + 21
and
n
X
j,k=0
2
|djk | ≤ const
n
X
e
−2jπ
(j +
1 2k0
2)
j=0
n
X
1
1 2
(k
+
2)
k=0
show that
∞
X
j,k=0
|djk |2 < ∞.
Consequently, for every ε > 0, there exists an n0 ∈ N such that
kKk0 − Pn Kk0 Pn kL(ℓ2 ) ≤ kKk0 − Pn Kk0 Pn kF < ε
∀n > n0 ,
where k · kF denotes the Frobenius norm. Since the operators Pn Kk0 Pn are compact, the
operator Kk0 is compact, too.
Let us define the operators A, Aτ : ℓ2 −→ ℓ2 as in (3.3), (3.4), (3.5) as well as the
operators
(7.37)
K=
m−
X
βk−0 Kk0
and
τ
K =
k0 =1
m+
X
βk+0 Kτk0 ,
k0 =1
τ ∈ {σ, µ}.
Then, using Proposition 3.2 and the Lemmas 7.5, 7.9, 7.10, 7.14, 7.15, we get Proposition 3.4.
8. Proof of Lemma 4.8. Assertion (a) was established in [10, Corollary 5.15]. In the
case that the operators Bk± do not occur, assertion (b) was also proved in [10, Lemma 5.16].
According to Propositions 3.2 and 3.4, it suffices to show that
o
(8.1)
[Ak0 ]4n + [Kk0 ]4n − Mτn Bk−0 Ln ∈ J−1 ,
and
(8.2)
[Aσk0 ]3n + [Kσk0 ]3n − Mσn Bk+0 Ln
[Aµk0 ]3n
+
[Kµk0 ]3n
−
o
o
Mµn Bk+0 Ln
∈ J1 ,
∈ J1 ,
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
241
where
(∓1)k0 xk0 −1
,
πi (1 + x)k0
∞
j + 21
(j + 21 )2
,
= 2 · h−
k0
(k + 12 )2 (k + 21 )2 j,k=0
h±
k0 (x) =
Ak 0
and
∞
(j + 21 )2
1
,
Aσk0 = 2 · h+
k0
(k + 12 )2 k + 21 j,k=0
∞
1
(j + 1)2
,
Aµk0 = 2 · h+
k0
(k + 1)2 k + 1 j,k=0
and where Kτk0 , Kk0 are defined by (7.34), (7.35), (7.36). At first we consider relation (8.1).
Define the matrices (cf. (7.24) and (7.26))
"
h
ik0 −1
q
(j + 21 )2k0 −1
2
(n)
(n)
σ
Bn :=
−
1
−
x
s
b
n−k,n n−j,n−k
n−j,n−k
πi (k + 1 )2 + (j + 1 )2 k0
2
2
# n−1
,
j,k=0
and
"
k0
X
(k + 21 )(j + 12 )2k0 −2t
2
πi (k + 1 )2 + (j + 1 )2 k0 −t+1
t=1
2
2
l−s
l−1
t−1 X
t − 1 X χt−l−2 χls (j + 12 )π
1
√
·
t−1− l−s
(t − 1)!
l
2
2
s=0 2
l=0
r
k0
q
X
(n)
k0 −t
π
(n)
bn−j,n−k
− (−1)k sn−k,n−j
(−1)n+t−1 1 + xσn−j,n
2
t=1
# n−1
t
σ
e
.
· hn (−2 − xn−j,n )
1
Cn := (−1)k e−(j+ 2 )π
j,k=0
Regarding Lemma 7.10 and equation (7.28), we derive
(8.3)
Ṽnσ [Ak0 ]4n + [Kk0 ]4n − Mσn Bk−0 Ln (Ṽnσ )−1 = Bn + Cn .
The matrix Bn can be written in the form
"
(j + 21 )2k0 −1
2
Bn =
πi (k + 1 )2 + (j + 1 )2 k0
2
2
q
1 − xσn−k,n 2
j + 21
1
√
+
O
−
1
1
2
2
πi (k + 2 ) + (j + 2 )
n
2
(√
"
)#k0 −1 # n−1
q
j + 21
1
2
σ
+O
,
· n 1 + xn−j,n
π (k + 21 )2 + (j + 12 )2
n
j,k=0
ETNA
Kent State University
http://etna.math.kent.edu
242
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
where we used
(n)
bn−j,n−k = ni
q
(n)
1 + xσn−j,n sn−j,n−k
and Lemma 7.11. Since (cf. (7.32))
n
(8.4)
q
−1
1
1 + xσn−j,n j +
≤ const,
2
0 ≤ j ≤ n − 1,
n ∈ N,
we conclude that
"
q
1 − xσn−k,n 2
j + 21
2
√
−
πi (k
πi (k + 12 )2 + (j + 21 )2
2
)#k0 −1 # n−1
(√
"
n−1
1
q
j
+
1
2
2
σ
+ O
· n 1 + xn−j,n
π (k + 12 )2 + (j + 21 )2
n j,k=0
j,k=0
q
k0 −1
q
"
σ
σ
1 2k0 −1
1
−
x
n
2(1
+
x
)
n−j,n
n−k,n
(j + 2 )
2
√
=
−
1
k
πi (k + 1 )2 + (j + 1 )2 0
π j+2
2
Bn =
(j + 21 )2k0 −1
k0
+ 12 )2 + (j + 21 )2
2
2
(j + 21 )2k0 −1
2
·
πi (k + 1 )2 + (j + 1 )2 k0
2
We remark that the constants in O
1
n
2
# n−1
j,k=0
n−1
1
.
+ O
n j,k=0
are independent of j, k, and n. Define the matrices
n−1
( q
)
n 2(1 + xσn−j,n ) k0 −1
,
δj,k
Dn =
π j + 21
j,k=0
n−1
q
1 − xσn−k,n
√
,
− 1 δj,k
En =
2
j,k=0
"
q
k0 −1
# n−1
n 2(1 + xσn−j,n )
1−
Fn =
,
δj,k
π j + 21
j,k=0
"
(j + 21 )2k0 −1
2
Gn =
πi (k + 1 )2 + (j + 1 )2 k0
2
2
# n−1
,
j,k=0
n−1
1
and Hn = O
such that
n j,k=0
(8.5)
Bn = −Dn Gn En + Fn Gn + Hn .
ETNA
Kent State University
http://etna.math.kent.edu
243
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
Now we turn to the matrix Cn . Due to Lemma 7.11, this matrix can be written as
"
k0
t−1 X
X
(k + 21 )(j + 12 )2k0 −2t
2
t−1
1
Cn := (−1) e
πi (k + 1 )2 + (j + 1 )2 k0 −t+1 (t − 1)!
l
t=1
l=0
2
2
l−s
l−1
X
k + 21
χt−l−2 χls (j + 21 )π
1
(−1)k 2
√
√
·
+
O
−
l−s
1 2
1 2
t−1−
πi
n
(k
+
)
+
(j
+
)
2
2
2
2
2
s=0 2
(√
"
)#k0 −t
k
0
1
q
X
j
+
1
2
2
n 1 + xσn−j
·
1 2 +O
1 2
π
n
)
+
(j
+
)
(k
+
2
2
t=1
# n−1
r
q
π
e
ht (−2 − xσn−j,n )
.
· (−1)n+t−1 1 + xσn−j,n
2 n
k −(j+ 21 )π
j,k=0
Taking into account the relations (7.19) and (8.4), we get
"
k0
t−1 X
X
(k + 21 )(j + 21 )2k0 −2t
2
1
t−1
Cn := (−1) e
πi (k + 1 )2 + (j + 1 )2 k0 −t+1 (t − 1)!
l
t=1
l=0
2
2
k0 −t
q
l−s
k0 n ·
l−1
2(1 + xσn−j )
X
X
χt−l−2 χls (j + 12 )π
k
√
−
(−1)
·
l−s
π j + 21
2
2t−1− 2
k −(j+ 12 )π
t=1
s=0
·
1
2 )(j
(k +
2
πi (k + 1 )2 +
2
(−1)n+t−1 q
√
1 + xσn−j,n
2
# n−1
r
n−1
1
π et
σ
hn (−2 − xn−j,n )
.
+ O
·
2
n j,k=0
+ 21 )2k0 −2t
k0 −t+1
(j + 21 )2
j,k=0
Set
k0 −t
" q
# n−1
n 2(1 + xσn−j )
t
Kn =
,
− 1 δj,k
π j + 21
j,k=0
Ltn
Mtn
Ntn
"
(k + 21 )(j + 12 )2k0 −2t
2
= (−1)
πi (k + 1 )2 + (j + 1 )2 k0 −t+1
"
k
2
(−1)n+t−1 q
√
=
1 + xσn−j,n
2
=
"
2
r
# n−1
,
j,k=0
π et
h (−2 − xσn−j,n )δj,k
2 n
# n−1
,
j,k=0
l−s
l−1
1
t−1 e−(j+ 2 )π X t − 1 X χt−l−2 χls (j + 12 )π
√
t−1− l−s
(t − 1)!
l
2
2
s=0 2
l=0
(−1)n+t−1 q
√
1 + xσn−j,n
−
2
r
# n−1
!
π et
σ
,
h (−2 − xn−j,n ) δj,k
2 n
j,k=0
ETNA
Kent State University
http://etna.math.kent.edu
244
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
n−1
1
. We get
and Pn = O
n j,k=0
Cn =
(8.6)
k0
X
t=1
Ntn · Ltn −
k0
X
t=1
Ktn · Mtn · Ltn + Pn .
The diagonal operators Mtn , Dn : ℓ2 −→ ℓ2 are uniformly bounded due to (7.19) and (8.4).
The same holds true for Ltn , Gn : ℓ2 −→ ℓ2 in view of Lemma 3.11. Hence, using (8.3),
e σ : im Ln −→ im Pn , we can
(8.5), (8.6), (4.2), and taking into account the unitarity of V
n
write
o
[Ak0 ]4n + [Kk0 ]4n − Mτn Bk−0 Ln + J−1 (F/J)/J−1
o
o
σ −1
σ
+ (Ṽnσ )−1 Cn Ṽnσ Ln + J−1 ≤ (Ṽn ) Bn Ṽn Ln + J−1 (F/J)/J−1
(F/J)/J−1
o
σ −1
σ
≤ (Ṽn ) Dn Gn En Ṽn Ln + J−1 (F/J)/J−1
o
+ (Ṽnσ )−1 Fn Gn Ṽnσ Ln + J−1 (F/J)/J−1
o
+ (Ṽnσ )−1 Hn Ṽnσ Ln + J−1 (F/J)/J−1
k0 o
X
+
(Ṽnσ )−1 Ntn Ltn Ṽnσ Ln + J−1 t=1
+
(F/J)/J−1
k0 o
X
(Ṽnσ )−1 Ktn Mtn Ltn Ṽnσ Ln + J−1 t=1
(F/J)/J−1
o
+ (Ṽnσ )−1 Pn Ṽnσ Ln + J−1 (F/J)/J−1
n−1 sup Dn Gn En f (xσn−j,n )δj,k j,k=0 2
≤ inf
f ∈C−1 n=1,2,...
L(ℓ )
n−1
sup f (xσn−j,n )δj,k j,k=0 Fn Gn 2
+ inf
f ∈C−1 n=1,2,...
L(ℓ )
n−1
sup f (xσn−j,n )δj,k j,k=0 Hn + inf
2
f ∈C−1 n=1,2,...
+
k0
X
t=1
+
k0
X
t=1
inf
L(ℓ )
n−1
sup f (xσn−j,n )δj,k j,k=0 Ntn Ltn f ∈C−1 n=1,2,...
inf
n−1
sup f (xσn−j,n )δj,k j,k=0 Ktn Mtn Ltn f ∈C−1 n=1,2,...
+ inf
L(ℓ2 )
n−1
sup f (xσn−j,n )δj,k j,k=0 Pn f ∈C−1 n=1,2,...
L(ℓ2 )
L(ℓ2 )
ETNA
Kent State University
http://etna.math.kent.edu
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
≤ const
n−1 sup En f (xσn−j,n )δj,k j,k=0 inf
f ∈C−1 n=1,2,...
245
L(ℓ2 )
n−1
sup f (xσn−j,n )δj,k j,k=0 Fn 2
+ inf
f ∈C−1 n=1,2,...
L(ℓ )
n−1
σ
sup f (xn−j,n )δj,k j,k=0 Hn 2
+ inf
f ∈C−1 n=1,2,...
+
k0
X
t=1
+
k0
X
t=1
L(ℓ )
n−1
sup f (xσn−j,n )δj,k j,k=0 Ntn inf
f ∈C−1 n=1,2,...
inf
n−1
sup f (xσn−j,n )δj,k j,k=0 Ktn f ∈C−1 n=1,2,...
L(ℓ2 )
n−1
sup f (xσn−j,n )δj,k j,k=0 Pn + inf
L(ℓ2 )
f ∈C−1 n=1,2,...
L(ℓ2 )
!
.
Choosing f ∈ C−1 with supp(f ◦ cos) ⊂ [π − ε, π] and with ε ∈ (0, 1), a simple Frobenius
norm estimate shows that
n−1
≤ const · ε
sup f (xσn−j,n )δj,k j,k=0 Hn L(ℓ2 )
n=1,2,...
and
n−1
sup f (xσn−j,n )δj,k j,k=0 Pn n=1,2,...
L(ℓ2 )
≤ const · ε.
Moreover, there exist a δ ∈ (0, 1) and a function f ∈ C−1 with supp(f ◦ cos) ⊂ [π − δ, π],
such that
n−1 ≤ ε,
sup En f (xσn−j,n )δj,k j,k=0 L(ℓ2 )
n=1,2,...
n−1
sup f (xσn−j,n )δj,k j,k=0 Fn n=1,2,...
n−1
sup f (xσn−j,n )δj,k j,k=0 Ntn n=1,2,...
and
n−1
sup f (xσn−j,n )δj,k j,k=0 Ktn n=1,2,...
≤ ε,
L(ℓ2 )
≤ ε,
L(ℓ2 )
≤ ε.
n−1
(αj − βj )δj,k j,k=0 , where
"
#ℓ−s
ℓ−1
1
t−1 e−(j+ 2 )π X t − 1 X χt−ℓ−2 χℓs j + 21 π
√
αj =
t−1− ℓ−s
(t − 1)!
ℓ
2
2
s=0 2
ℓ=0
For example, let us consider the matrices Ntn =
and (cf. (7.8))
L(ℓ2 )
r
(−1)n+t−1 q
π t
σ
√
βj =
1 + xn−j,n
h̃ (−2 − xσn−j,n )
2 n
2
r
q
n 3 + x σ
1
n−j,n
σ
σ
2
= 2 + xn−j,n − (2 + xn−j,n ) − 1
2
(t − 1)!
t−1
ℓ−1
σ
ℓ
σ
ℓ−s
X t − 1 X pt−ℓ−2 (−2 − xn−j,n )ps (−2 − xn−j,n ) q
σ
·
n
1
+
x
.
ℓ−s
n−j,n
ℓ
(3 + xσn−j,n )t−1− 2
s=0
ℓ=0
ETNA
Kent State University
http://etna.math.kent.edu
246
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
Remember that χs = ps (−1) and χℓs = pℓs (−1), where ps (x) and pℓs (x) are polynomials.
This yields
αj − βj
t−1 X
t−1
1
=
(t − 1)!
ℓ
ℓ=0
#
"
r
ℓ−1
σ
σ
ℓ
σ
X pt−ℓ−2 (−1)pℓ (−1)
3
+
x
p
(−2
−
x
)p
(−2
−
x
)
t−ℓ−2
s
n−j,n
n−j,n
n−j,n
s
−
·
ℓ−s
t−1− ℓ−s
2
2
2
(3 + xσn−j,n )t−1− 2
s=0
"
#ℓ−s
j + 12 π
−(j+ 21 )π
√
·e
2
#
"r
t−1
ℓ−1
X t−1 X
3 + xσn−j,n pt−ℓ−2 (−2 − xσn−j,n )pℓs (−2 − xσn−j,n )
1
+
ℓ−s
(t − 1)!
2
ℓ
(3 + xσn−j,n )t−1− 2
s=0
ℓ=0
"
#ℓ−s
1
n
π
j
+
1
√2
· e−(j+ 2 )π
2
q
n q
ℓ−s o
n 1 + xσn−j,n
− 2 + xσn−j,n − (2 + xσn−j,n )2 − 1
.
(j+ 21 )π
≤ δ, it is
Since, for supp(f ◦ cos) ⊂ [π − δ, π], f (xσn−j,n ) 6= 0 is equivalent to
n
sufficient to show that εjn ≤ const ε for
"
#ℓ−s
1
−(j+ 12 )π j + 2 π
√
εjn :=e
2
q
n q
ℓ−s n 1 + xσn−j,n
− 2 + xσn−j,n − (2 + xσn−j,n )2 − 1
(j+ 12 )π
≤ δ, and δ > 0 sufficiently small. Using the same notations as in the
and for n ∈ N,
n
proof of (7.10), we can write
ℓ−s
"
#ℓ−s
(j+ 12 )π
1
j+2 π
sin 2n
−(j+ 12 )π
√
1−
εjn = e
1
(j+ 2 )π
2
2n
q
n q
ℓ−s −(j+ 21 )π
σ
σ
σ
2
− 2 + xn−j,n − (2 + xn−j,n ) − 1 + n 1 + xn−j,n
e
(1)
(2)
= εjn + εjn ,
where
εjn = e−(j+ 2 )π
(1)
and
(2)
εjn
1
"
ℓ−s
#ℓ−s
(j+ 21 )π
j+ π
sin 2n
√
1−
(j+ 21 )π
2
1
2
2n
q
ℓ−s
j+ 21 )π
(
1
e
−
j+
π
= n 1 + xσn−j,n
e ( 2 ) 1 − h
.
i
nδ
n 1
(1 + δn ) δn
ETNA
Kent State University
http://etna.math.kent.edu
247
COLLOCATION FOR SIE’S WITH PARTICULAR MELLIN TYPE SINGULARITIES
(1)
Of course, εjn ≤ ε if δ > 0 is small enough. Furthermore,
(2)
εjn
≤
"
#ℓ−s
j + 21 π
1
√
e−(j+ 2 )π
2
"
#nδn
1
1
e
j+ 2 )π−nδn
j+ 2 )π−nδn
(
(
−1 e
+e
− 1
·
1
(1 + δn ) δn
(3)
(4)
= εjn + εjn ,
where
(3)
εjn
(4)
εjn
"
e
#nδn
"
#ℓ−s
j + 21 π
√
e−nδn ,
2
− 1
1
(1 + δn ) δn
"
#ℓ−s
j + 21 π
1
1
√
=
e−(j+ 2 )π e(j+ 2 )π−nδn − 1 .
2
=
e
≤ 1 + ε. Consequently, since
1
(1 + δn ) δn
nδn − j + 1 π ≤ c1 δ j + 1
2
2
1
2nδn ε with constants c1 and c2 , we get
and (1 + ε)nδn − 1 ≤ nδn 2nδn −1 ε ≤ c2 j +
2
"
#ℓ−s nδn
j + 12 π
1
2
(3)
√
εjn ≤ c2
j+
ε
2
e
2
"
#ℓ−s (π−c1 δ)(j+ 21 )
j + 21 π
1
2
π
√
≤ c2
j+
ε ≤ c3 ε if c1 δ < .
2
e
2
2
For sufficiently small δ > 0, we have
(4)
Finally, to estimate εjn , we remark that there are constants c4 and A > 0 such that
xπ
√
2
ℓ−s
e−xπ ≤ c4 for all x ≥ 0
Choose δ > 0 such that c1 δ ≤
(4)
εjn
if j +
1
2
≤
"
π
2
and
xπ
√
2
ℓ−s
e−
xπ
2
≤ ε for x ≥ A.
(4)
and e±c1 δA − 1 ≤ ε. Then, εjn ≤ c4 ε if j +
1
2
≤ A and
"
#ℓ−s
#ℓ−s
1
π
j
+
j + 21 π
1
1 π
1
√
√2
e−(j+ 2 )π ec1 δ(j+ 2 ) ≤
e−(j+ 2 ) 2 ≤ ε
2
2
≥ A. Consequently,
o
[Ak0 ]4n + [Ãk0 ]4n − Mτn Bk0 Ln + J−1 (F/J)/J−1
= 0.
Hence, (8.1) is proved in case τ = σ. The proofs of (8.1) in case τ = µ and of (8.2) can be
done in the same way.
ETNA
Kent State University
http://etna.math.kent.edu
248
P. JUNGHANNS, R. KAISER, AND G. MASTROIANNI
REFERENCES
[1] M. R. C APOBIANCO , G. C RISCUOLO , AND P. J UNGHANNS, On the numerical solution of a hypersingular
integral equation with fixed singularities, in Recent Advances in Operator Theory and Applications. Proceedings of the 17th International Workshop on Operator Theory and Applications, T. Ando, R. E. Curto,
I. B. Jung, and W. Y. Lee, eds., Oper. Theory Adv. Appl., 187, Birkhäuser, Basel, 2009, pp. 95–116.
[2] R. D UDUCHAVA, Integral Equations in Convolution with Discontinuous Presymbols, Singular Integral Equations with Fixed Singularities, and Their Applications to Some Problems of Mechanics, B. G. Teubner,
Leipzig, 1979.
[3] J. E LSCHNER, Asymptotics of solutions to pseudodifferential equations of Mellin type, Math. Nachr., 130
(1987), pp. 267–305.
[4] A. E RD ÉLYI , W. M AGNUS , F. O BERHETTINGER , AND F. G. T RICOMI, Tables of Integral Transforms, Vol. I,
McGraw-Hill, New York, 1954.
[5] F. E RDOGAN AND G. D. G UPTA, The inclusion problem with a crack crossing the boundary, Intern. J. of
Fracture, 11 (1975), pp. 13–27.
[6] G. F REUD, Orthogonale Polynome, Birkhäuser, Basel, 1969.
[7] I. G OHBERG AND N. K RUPNIK, One-dimensional Linear Singular Integral Equations, Vol. I, Birkhäuser,
Basel, 1992.
, One-dimensional Linear Singular Integral Equations, Vol. II, Birkhäuser, Basel, 1992.
[8]
[9] R. H AGEN , S. ROCH , AND B. S ILBERMANN, Spectral Theory of Approximation Methods for Convolution
Equations, Birkhäuser, Basel, 1995.
[10] P. J UNGHANNS AND R. K AISER, Collocation for Cauchy singular integral equations, Linear Algebra Appl.,
439 (2013), pp. 729–770.
[11] P. J UNGHANNS AND A. R ATHSFELD, On polynomial collocation for Cauchy singular integral equations with
fixed singularities, Integral Equations Operator Theory, 43 (2002), pp. 155–176.
[12]
, A polynomial collocation method for Cauchy singular integral equations over the interval, Electron.
Trans. Numer. Anal., 14 (2002), pp. 79–126.
http://etna.mcs.kent.edu/vol.14.2002/pp79-126.dir
[13] P. J UNGHANNS AND A. ROGOZHIN, Collocation methods for Cauchy singular integral equations on the
interval, Electron. Trans. Numer. Anal., 17 (2004), pp. 11–75.
http://etna.mcs.kent.edu/vol.17.2004/pp11-75.dir
[14] A. I. K ALANDIYA, Mathematical Methods of Two-Dimensional Elasticity, Mir Publishers, Moscow, 1975.
[15] N. Y. K RUPNIK, Banach Algebras with Symbol and Singular Integral Operators, Birkhäuser, Basel, 1987.
[16] J. E. L EWIS AND C. PARENTI, Pseudodifferential operators of Mellin type, Comm. Partial Differential Equations, 8 (1983), pp. 477–544.
[17] G. M ASTROIANNI , C. F RAMMARTINO , AND A. R ATHSFELD, On polynomial collocation for second kind
integral equations with fixed singularities of Mellin type, Numer. Math., 94 (2003), pp. 333–365.
[18] S. P R ÖSSDORF AND B. S ILBERMANN, Numerical Analysis for Integral and Related Operator Equations,
Akademie-Verlag, Berlin, 1991.
, Numerical Analysis for Integral and Related Operator Equations, Birkhäuser, Basel, 1991.
[19]