Document 11678965
advertisement

AN ABSTRACT OF THE THESIS OF
Ho-Seong Mha for the degree of Doctor of Philosophy in Civil Engineering presented on May
7, 1996. Title: Deterministic and Stochastic Behaviors of a Piecewise-Linear System.
Redacted for Privacy
Abstract Approved:
Solomon C.S. Yim
The (nonlinear) response behavior of a piecewise-linear system is investigated under
both deterministic and stochastic excitations in this study. A semi-analytical procedure is
developed to predict the system behavior by evaluating the joint probability density functions
of the Fokker-Planck equations of the stochastic piecewise-linear system under random
excitations via a path-integral solution procedure.
From an analysis of the deterministic system, nonlinear system behavior is derived for
further analysis of the corresponding stochastic system. The influence of variations in other
parameters on the response behavior are also examined.
In the stochastic system analysis, which represents a more realistic approach to
understanding the system behavior, a Markov process approach is used. By introducing
random perturbations in the harmonic excitation, the stochastic responses are examined and
compared to those of the corresponding deterministic system. Stability of the various
responses including regular and chaotic motions, is investigated by varying the noise intensity.
Routes to chaos in period-doubling processes with and without external random perturbations
are studied and compared. Stationarity and ergodicity of the chaotic responses of the system
are examined via time domain and probability domain simulations.
Potential coexisting responses of the piecewise-linear system are examined via the
path-integral solutions.
It is found that the path-integral solutions can provide global
information of the system behavior in the probability domain, and can also verify the potential
coexisting responses and discern the relative strength of the coexisting response attractors.
DETERMINISTIC AND STOCHASTIC BEHAVIORS
OF A PIECEWISE-LINEAR SYSTEM
by
Ho-Seong Mha
A THESIS
submitted to
Oregon State University
in partial fulfillment of
the requirements for the
degree of
Doctor of Philosophy
Completed May 7, 1996
Commencement June 1996
©Copyright by Ho-Seong Mha
May 7, 1996
All Rights Reserved
Doctor of Philosophy thesis of Ho-Seong Mha presented on May 7, 1996
APPROVED:
Redacted for Privacy
Major Professor, representing Civil Engineering
Redacted for Privacy
Head of Department of Civil Engineering
j
Redacted for Privacy
Dean of Graduate
hool
I understand that my thesis will become part of the permanent collection of Oregon State
University libraries. My signature below authorizes release of my thesis to any reader
upon request.
Redacted for Privacy
ACKNOWLEDGEMENT
I would like to appreciate my major advisor Prof. Solomon C.S. Yim, for his
continuous support and advice on my graduate study at Oregon State University.
I also thank all other members of my committee: Prof. Ronald B Guenther, Prof.
John Peterson, Prof. Robert E Wilson, and Prof. Stephen E Binney for their interest and
thoughtful support.
I would also like to thank all the staff, faculty and fellow students of the Civil
Engineering department at Oregon State University.
I would like to express my deepest gratitude to my father the Prof. Geun-Sik Mha
for his inspiration, my mother JungYeon Kim for her continuous support, my wife for her
love and encouragement and my daughter for her smile.
TABLE OF CONTENTS
Pages
CHAPTER 1. INTRODUCTION
1
1.1 Review of Literature
2
1.2 Objectives and Scope
6
1.2.1 Objectives
1.2.2 Scope
6
8
CHAPTER 2. SYSTEM DESCRIPTION
11
2.1 Piecewise-Linear Restoring Force
14
2.2 Excitation Forces
16
2.2.1 Deterministic Excitations
2.2.2 Excitations with Random Perturbations
2.2.3 Narrow-Band Excitations
2.3 Governing Equations
16
21
24
27
2.3.1 Deterministic System
27
2.3.2 Stochastic System
31
2.3.2.1 System with a Harmonic Excitation with Random Perturbations 31
2.3.2.2 System with Narrow-Band Excitations
33
2.4 Approximate Piecewise-Linear Restoring Force of a Mooring System
2.4.1 Derivation of Restoring Forces
2.4.2 Approximate Piecewise-Linear Restoring Force
34
34
39
CHAPTER 3. METHODS OF ANALYSIS
44
3.1 Deterministic System
45
3.1.1 Analytical Solutions
3.1.2 Numerical Algorithm
3.1.3 Techniques of Analysis
46
48
50
TABLE OF CONTENTS (continued)
Pages
3.1.3.1 Local Behavior and Hamiltonian
3.1.3.2 Classification of System Responses
3.2 Stochastic Piecewise-Linear System
3.2.1 Stationary Processes
3.2.2 Ergodic Processes
3.2.3 Mean Poincare Map
3.3 Markov Process Analysis
3.3.1 Markov Processes
3.3.2 Fokker-Planck Equation
3.3.3 Path-integral Solutions
3.3.3.1 System with Randomly Perturbed Harmonic Excitation
3.3.3.2 System with Narrow-Band Excitation
51
52
54
57
59
60
63
63
65
68
76
77
CHAPTER 4. DETERMINISTIC SYSTEM
79
4.1 Responses of the Piecewise-Linear System
81
4.1.1 Regular Responses
4.1.2 Chaotic Responses
4.2 Parametric Analysis
4.2.1 Effects of Varying Stiffness Ratio
4.2.2 Effects of Varying Damping Ratio
4.2.3 Effects of Varying Frequency Ratio
4.2.4 Effects of Varying Excitation Amplitude
83
83
85
90
100
103
106
CHAPTER 5. STOCHASTIC SYSTEM
107
5.1 Effects of Excitation Random Noise
108
5.1.1 Noise Effect on Periodic Attractors
5.1.2 Noise Effect on Chaotic Attractors
5.1.3 Mean Poincare Maps
5.1.4 Mean Time History
109
119
121
125
TABLE OF CONTENTS (continued)
Pages
5.2 Stochastic Processes
5.2.1 Regular Poincare Maps and Ensembles
5.2.2 First Order Probability Density Functions
5.2.3 Analysis of Weakly Stationary Processes
5.2.4 Analysis of Ergodic Processes
5.3 Analysis of System Behavior in Probability Domain
5.3.1 Periodic Responses
5.3.2 Chaotic Responses
5.3.3 Coexisting Responses
5.3.4 Comparison of Probability Density Functions with Time Domain
Simulations
127
128
128
131
135
135
138
145
150
160
5.4 System Responses with Narrow-Band Excitations
162
CHAPTER 6. SUMMARY AND CONCLUSIONS
167
6.1 Summary of Results
168
6.1.1 Deterministic System
6.1.2 Stochastic System
168
169
6.2 Conclusions
172
6.3 Recommended Future Study
174
BIBLIOGRAPHY
176
LIST OF FIGURES
Pages
Figures
2.1
Piecewise-linear restoring force
12
2.2
Various configurations of mooring systems and corresponding restoring forces
13
2.3
Narrow-band excitation and filtered white noise excitation
27
2.4
Plan view and profile of the mooring system
35
2.5
Movements of sphere and cable
36
2.6
Comparison between mooring restoring forces and approximate piecewise­
linear restoring forces with different configurations
42
3.1
Numerical solution procedure of piecewise-linear systems
49
3.2
Restoring force, potential and Hamiltonian of the piecewise-linear system
53
3.3
Illustration of generating the mean Poincare map
62
4.1
Nonlinear phenomena of the piecewise-linear system
80
4.2
Sensitivity of the piecewise-linear system to the initial perturbations
82
4.3
Various regular responses
84
4.4
Chaotic response of the piecewise-linear system
86
4.5
Period-doubling processes in bifurcation diagrams
86
4.6
Cascade of period-doubling processes with the decreasing damping ratio in
the phase plane and Fourier spectra
89
4.7
Phase trajectories of undamped free vibrations with various stiffness ratios
91
4.8
Time histories of the piecewise-linear systems with the various stiffness ratios 93
4.9
Phase trajectories of the piecewise-linear systems with various stiffness ratios
94
4.10
Increasing nonlinearity of the piecewise-linear systems with varying stiffness
ratios
95
Quasiperiodic responses of the piecewise-linear systems
97
4.11
LIST OF FIGURES (continued)
Figures
Pages
4.12
Distribution of the responses of the piecewise-linear system on the parametric
map of stiffness ratio a and excitation amplitude Fo
98
4.13
Distribution of the responses of the piecewise-linear system on the parametric
101
map of damping ratio and excitation amplitude Fo
4.14
Effect of damping to the system responses with various damping ratios
4.15
Distribution of the responses of the piecewise-linear system on the parametric
104
map of frequency ratio 3 and excitation amplitude Fo
4.16
Chaotic responses of the systems with different frequency ratios
105
5.1
Effect of noise intensity to a P-2 periodic response away from bifurcation
to chaos in phase planes
110
Effect of noise intensity to a P-2 periodic response away from bifurcation
to chaos in Poincare maps
111
Effect of noise intensity to a P-2 periodic response near bifurcation to
chaos in Poincare maps
112
Poincare points versus bifurcation parameter (F0) with and without the
external noise
115
Detailed view of Poincare points versus bifurcation parameter (F0) with
and without the external noise
116
Cascade of period-doubling along with bifurcation parameter Fo with
and without the external noise
117
5.7
Effect of noise intensity to chaotic responses in Poincare maps
120
5.8
Comparison between regular Poincare maps and the mean Poincare maps
with different sample sizes
122
Comparison between regular Poincare maps and mean Poincare maps with
various noise intensities
123
5.2
5.3
5.4
5.5
5.6
5.9
5.10
102
Phase trajectories of one sample and ensemble averaged time histories of the
piecewise-linear system under the randomly perturbed harmonic excitation
126
with different sample sizes
LIST OF FIGURES (continued)
Figures
Pages
5.11
Poincare maps of one realization and ensembles collected at different forcing
cycles
129
5.12
1St order probability density functions of a single realization and ensembles
of the random process of the system responses collected at different times
130
5.13
Convergence of ensemble average E[x(t)] and autocovariance C [x(t), x(t+t)]
with increasing sample size
133
5.14
Weak stationarity and ergodicity of the stochastic process of chaotic responses 134
5.15
Comparison of deterministic chaotic response and joint probability density
function on Poincare section.
137
Evolution of the joint probability density function f(xl, x2; t) of P-2 periodic
response away from bifurcation point in 2-D contour maps (q=0.0003)
139
Evolution of the joint probability density function f(xl, x2; t) of a highly
perturbed P-2 periodic response away from the bifurcation point in 2-D
contour maps
140
5.16
5.17
5.18
Steady state probability density functions f(x1, x2; t) of P-2 periodic responses
away from the bifurcation point in 3-D contour maps with different noise
intensities
142
5.19
Evolution of the joint probability density function f(xl, x2; t) of a perturbed
P-2 periodic response near the bifurcation point in 2-D contour maps
144
Evolution of the joint probability density functions f(xl,x2; t) of chaotic
response in 2-D contour maps
146
Steady state probability density functions showing the effect of noise to the
chaotic response with various noise intensities in 2-D contour maps
147
Steady state probability density functions showing the effect of noise to
chaotic response with various noise intensities in 3-D contour maps
148
5.23
Two harmonic coexisting responses
152
5.24
Evolution of the joint probability density function f(xl, x2; t) of two harmonic
coexisting responses in 2-D contour maps
154
5.20
5.21
5.22
LIST OF FIGURES (continued)
Figures
Pages
Steady state joint probability density functions showing the effect of noise
to two harmonic coexisting responses with various noise intensities in 2-D
contour maps
155
5.26
Multiple coexisting responses
157
5.27
Steady state joint probability density functions of multiple coexisting
responses with different noise intensities
158
Comparison of ensembles of numerical solutions and PDF's of path integral
solutions
161
Response behavior of the piecewise-linear system under a narrow-band
excitation
163
Evolution of the joint probability density function of the system response
under a narrow-band excitation
164
Effect of noise to the responses of the systems with narrow-band excitations
165
5.25
5.28
5.29
5.30
5.31
DETERMINISTIC AND STOCHASTIC BEHAVIORS
OF A PIECEWISE-LINEAR SYSTEM
CHAPTER 1. INTRODUCTION
With the increasing demand to discover new energy sources, the exploration and
production of hydrocarbon have been moving gradually toward deep water. As a result, the
need for compliant offshore structures has been increasing steadily over the last few decades.
Because the response behaviors of compliant systems are intrinsically nonlinear due to large
working deflections, accurate response prediction of the compliant system subjected to
winds, waves and current, is highly challenging. Complex nonlinear, possibly chaotic,
behaviors of these systems have been reported in many analytical studies raising concern in
design and hope of understanding the source of random-like noise (Moon, 1987).
Among dynamical systems with nonlinear components, many practical structural
systems with nonlinearity induced by material or geometrical properties possess stiffness that
can be analytically approximated as piecewise-linear. Such systems have been the subject
of several investigations (e.g. Shaw and Holmes 1982, and Schulman 1983). The structural
properties of some offshore structures including mooring systems can be described as
piecewise-linear because the mooring cable may become slack, causing a discontinuity in
stiffness.
Single-degree-of-freedom piecewise-linear systems have been employed to
investigate the behaviors of offshore structures in recent researches (Thompson et al. 1983;
Thompson et al. 1984; Thompson and Stewart 1986; Huang et al. 1989; Natsiavas 1990;
and Choi and Lou 1991).
2
In the ocean environment, excitation forces induced by wind, waves and current are
not deterministic, but contains a finite degree of randomness. Thus, analysis of the responses
of ocean structural systems driven by a deterministic force with random perturbations is
needed to further understanding and analysis of nonlinear behaviors of these structures. The
response behaviors of chaotic systems under additive random perturbations have been
investigated to determine the stability of periodic responses (Kapitaniak
and Huberman
1980;
Crutchfield et al.
1981;
1991;
and Crutchfield and Farmer
Crutchfield
1982).
In this study, the dynamics of an offshore structure with a piecewise-linear restoring
force is investigated from both deterministic and stochastic perspectives to gain a better
understanding of the nonlinear response behaviors in an ocean environment. For the
deterministic system, the effects of variations in both system and excitation parameters are
examined. By introducing additive random noise (perturbations) in the system, statistical
descriptions of the responses are examined. While predicting the precise location of the
(random) response is impossible, a probabilistic description of the response can be estimated
via the solution to a stochastic differential equation of the piecewise-linear system
(Feigenbaum 1983).
1.1 Review of Literature
The response of structural and mechanical systems with amplitude constraints, such
as restoring forces, are inherently nonlinear. When a periodic force is applied to the system,
unlike a linear system, a nonlinear system may possess a wide variety of periodic oscillations
in addition to that which has the same period as the external force (Hayashi 1985). One
3
typical feature which distinguishes a nonlinear system from a linear system is frequency-
amplitude interaction (Nayfeh and Mook 1979). Another is the presence of coexisting
responses.
Thompson and Stewart (1986) discovered coexisting responses under
subharmonic resonances and chaotic, non-periodic motions of the impact oscillator and
discussed associated implications to offshore structural design.
Recently, there has been increasing interests in the chaotic motions of nonlinear
systems. These motions have been investigated in many science and engineering fields
(Moon 1980; Tang and Dowell 1988; Tung and Shaw 1988; Shaw and Rand 1989; Shaw
and Shaw 1989; Li et al. 1990; Moore and Shaw 1990; Poddar et al. 1988; and Gottlieb
and Yim 1992).
To identify chaotic responses, various techniques including Poincare maps, phase
plane, Fourier spectrum, and Lyapunov exponents have been employed. In the Poincare
map, the chaotic response can be identified by an infinite set of highly organized points in
the phase plane (Moon 1987). In a spectral density plot, the chaotic response exhibits a
broad band of frequencies. A positive Lyapunov exponent also indicates the chaotic nature
of the response motion (Wolf et al. 1985).
Piecewise-linear systems of various forms have been the subject of several
investigations (e.g. Shaw and Holmes 1983, and Schulman 1982). These forms include
bilinear, symmetric trilinear, non-symmetrical and general form, which consists of multiple
linear parts more than three regions (Shaw and Holmes 1982; Choi and Noah 1988;
Maezawa et al. 1973; Lau and Zhang 1992; and Natsiavas 1989, 1990a and b). Shaw and
Holmes (1982) found harmonic, subharmonic, and chaotic motions in the system with
bilinear stiffness. Choi and Noah (1988) studied the steady-state periodic solution of an
4
unsymmetric bilinear system by using the Fast Fourier Transformation algorithm and found
harmonic, superharmonic and subharmonic motions. Frequency domain techniques has been
employed to analyze periodic vibrations of the system with piecewise-linear stiffness. The
incremental harmonic balance method (IHB) was applied to the symmetric and unsymmetric
piecewise-linear system (Maezawa et al. 1973, 1980). Lau and Zhang (1992) extended the
IHB method to analyze systems with a general piecewise-linear stiffness and found that the
subharmonic resonances are closely related to the occurrence of chaos.
Liaw and Koh (1993) studied the dynamic stability and chaotic behavior of a
piecewise-linear system by examining bifurcation routes, Poincare map and Lyapunov
exponents. They found that the dynamic behavior is qualitatively similar to that of a typical
nonlinear system. Chaotic responses of a piecewise-linear system can be sensitive to the
initial conditions, but remains on a chaotic attractor with definite topological features.
Natsiavas (1989, 1990a and b) analyzed the behavior and the stability of the periodic
response of oscillators with trilinear, bilinear and general form of piecewise-linear restoring
forces under harmonic excitation. Natsiavas developed exact periodic locally linear solutions
and found that the periodic response of the piecewise-linear system to perturbations is
asymptotically stable, if eigenvalues of the Jacobian are less than unity.
Systems with piecewise-linear restoring forces are also examined in the analysis of
dynamic behaviors of offshore structures. Thompson et al. (1984) investigated the dynamics
of a compliant offshore structure and an articulated mooring tower with bilinear restoring
force. They examined various subharmonic responses and found coexisting solutions and
mentioned the potential danger of subharmonic responses. They also found that chaotic
responses exist and suggested designers and analysts examine their statistical properties.
5
Huang et al. (1989) studied the steady-state periodic response of a fluid-induced dynamic
system with bilinear stiffness and performed a stability analysis using numerically
calculating Floquet multipliers. They found that strong resonance occurs when the wave
frequency is close to the undamped natural frequency of the system. They also discovered
that the inclusion of a drag force in the absence of a steady current does not change the nature
of the response qualitatively and the drag force basically acts as viscous damping decreasing
the resonant amplitude of the response.
Yang and Cheng (1990) showed that under a unique set of initial conditions and a
deterministic harmonic excitation, the response is found to possess stochastic properties, and
claimed the validity of the ergodicity assumption. Crutchfield and Huberman (1980 and
1981) studied the influence of random fluctuations on the onset and characteristics of chaotic
behavior. They discovered that the folding structure of chaotic attractor is very stable under
the effect of random forces and that the cascade bifurcation in the presence of noise differs
from the one encountered in the deterministic systems.
Statistical properties of nonlinear oscillators can be investigated from a stochastic
perspective by examining the probability distribution function. For a nonlinear Langevin
equation under either harmonic excitation with external additive white noise or narrow-band
excitation, the corresponding Fokker-Planck equation can be obtained. The solution to the
Fokker-Planck equation gives the evolution of probability density function of the system
response. The influence of noise on a driven nonlinear oscillator was studied by Jung and
Hangi (1990) in both regular and chaotic regions by observing the probability distribution.
They examined the probability distribution of a driven nonlinear Langevin equation with
external noise and found that the noisy invariant measure shows a significant topological
6
transition, when the deterministic trajectories become chaotic. Davies and Liu (1990)
investigated the response envelope probability density function of a Duffing oscillator with
narrow-band excitation using approximate solution to the Fokker-Planck equation.
As can be seen in the above-mentioned works, the description of dynamics of a
system can be obtained by examining the probability density of the system responses in a
phase plane (Graham 1977). This can be achieved by solving for the path-integral solution
of the Fokker-Planck equations.
Path-integral solutions to the Fokker-Planck equation for linear and nonlinear
Gaussian processes have been developed in several previous studies (Graham 1977; Haken
1976; Wissel 1979; and Wehner and Wolfer 1983). Haken (1976) investigated the path-
integral solutions of a master equation and obtained the generalized Onsager-Machlup
function. Wissel (1979) developed a path-integral expression for nonlinear Gaussian
processes. Wehner and Wolfer (1983) provided a numerical procedure to solve the Fokker-
Planck equation based on path-integral formalism for a one-dimensional case.
1.2 Objectives and Scope
The main objective of this study is to provide a better understanding of the nonlinear
behaviors of the piecewise-linear system under both deterministic and stochastic excitations.
1.2.1 Objectives
In an ocean environment, randomness in the exciting wave force is inevitable, so the
system should be considered from a stochastic perspective. In this study, randomness in the
7
forcing excitation is modeled by introducing an additive Gaussian white noise to the
deterministic excitation, and the response behaviors of the piecewise-linear system are
examined. Alternatively, narrow-band excitations are applied to the system to examine the
response behavior under random excitation. The responses of the deterministic piecewise­
linear system are first examined, and various periodic and chaotic responses are traced.
These responses are further investigated in the corresponding stochastic systems.
In the analysis of the deterministic system, the objectives are to: (1) classify the
characteristics of the system response behaviors of the piecewise-linear system under
harmonic excitation; (2) identify all possible types of the responses including harmonic,
subharmonic, quasiperiodic and chaotic responses; (3) determine the parametric domain for
the responses;
(4) examine the influence of the parameters on the system response
behaviors; and (5) provide a baseline reference for the analysis of the system behavior for
the corresponding stochastic case.
For the stochastic system, the objectives are to: (1) examine the characteristics of the
system response behaviors of the piecewise-linear system under the presence of external
additive random noise; (2) determine the effects of external random noise on the system
behavior; (3) examine the stochastic properties of the system response processes under the
randomly perturbed harmonic excitation; (4) predict the response in the probability domain
using the path-integral solution of the joint probability density function; (5) examine
coexisting periodic responses and determine the potential presence of coexisting responses
of a system; (6) determine the relative strength of the coexisting response attractors; and (7)
examine the system responses under narrow-band excitations.
8
1.2.2 Scope
For the deterministic system, analytical solutions in each linear region of the
piecewise-linear system are derived and used to confirm the numerical solutions. In
particular, the following are investigated: (1) preliminary observations of the nonlinear
behavior by the interaction between initial displacement; (2) sensitivity of the system
behavior to the initial perturbations; (3) properties of regular and chaotic responses; (4)
period-doubling phenomena of the system responses with all parameters; (5) effect of
varying system parameters including stiffness ratio, damping ratio, frequency ratio and
excitation amplitude; and (6) parametric domains of the system responses for a wide range
of parameter values.
For the stochastic system, both time domain and probability domain simulations are
examined. In time domain analyses, ensembles are collected from 60 to 6000 sample
responses and the following are investigated: (1) noise effect on both regular and chaotic
responses; (2) period-doubling processes of the randomly perturbed system responses; (3)
usability of the mean Poincare maps in the highly noisy fields; (4) stochasticity of the time
processes of the system responses; and (5) application of ensemble average, auto-covariance,
and the covariance between tth sample mean Mt and tth observation X(t), to verify the weak
stationarity and ergodicity of the Poincare sampled processes of the perturbed chaotic
responses.
The followings are investigated in the probability domain analyses: (1) evolution of
joint probability density functions of both periodic and chaotic responses; (2) noise effect
in the probability distribution of the response ensembles;
(3) evolution of multiple
9
coexisting responses; (4) determination of the relative strength of responses among the
coexisting responses; (5) noise effect on stability of coexisting attractor; (6) validity of the
path-integral solution; (7) response behavior of the system under narrow-band excitations;
and (8) noise effect on system behavior with narrow-band excitations.
The contents of each chapter are briefly summarized herein. Chapter 1 provides a
review of the current literature and discusses the objectives and scope of the study. In
Chapter 2, specifications of the system considered are described in detail. The corresponding
stochastic system with the external random noise is introduced.
In Chapter 3, the
methodology employed is provided. For the deterministic system, analytical solutions are
derived for each local linear region. Techniques to classify the system responses are
explained. For the stochastic system, properties of stochastic processes are described as well
as stationary and ergodic processes. A semi-analytical method to obtain the evolution of the
probability density function of the stochastic piecewise linear system is developed. Markov
process, Fokker-Planck equation and path-integral solutions are described and derived for
the systems under randomly perturbed harmonic and narrow band excitations. In Chapter
4, the response results of the deterministic system are examined and analyzed. Effects of
variations in both system and excitation parameters are examined and demonstrated through
parametric maps. In Chapter 5, response results of the stochastic system are examined and
analyzed. First, the relative strength of the periodic and chaotic responses is examined via
the results of simulations. Stationarity and ergodicity of the Poincare sampled processes are
determined. Evolutions of the joint probability density function of the system responses are
examined to determine the characteristics of the system behavior under the presence of
10
external additive random noise and under the narrow-band excitation. In Chapter 6, a
summary of the results, conclusions and recommended future study are provided.
11
CHAPTER 2. SYSTEM DESCRIPTION
A single-degree-of-freedom piecewise-linear system is modeled to analyze the
deterministic and stochastic nonlinear behavior of the offshore mooring system under the
various forcing excitations. The forcing excitations considered are those of a sinusoidal
harmonic excitation, a harmonic excitation with random perturbations, and a narrow-band
excitation.
The piecewise-linear system has been employed in many research works to analyze
the dynamic response of compliant offshore structures such as moored barges and towers.
Under large motions, the mooring cable mechanism can become slack hence producing a
discontinuity in stiffness. This discontinuity can be modeled as a piecewise-linear restoring
force.
The governing equation of motion of the piecewise-linear system can be written as
follows:
m
.it+c s X+R (X) = F(t)
s
(2.1)
where R(X) is the restoring force which is a piecewise-linear function of displacement X.
The piecewise-linear restoring force is depicted in Figure 2.1. The damping coefficient is
assumed to be constant. F(t) is a wave-induced force on the body. Depending on the
particular model employed, F(t) can be classified as deterministic, randomly perturbed
harmonic and narrow-band excitations.
12
Figure 2.1
stiffness.
Piecewise-linear restoring force:
R(x);
ki=inside stiffness;
ko=outside
13
(a)
(b)
(c)
(d)
(e)
(0
ROO
IA
(g)
Various configurations of mooring systems and corresponding restoring
Figure 2.2
forces: (a),(d),(g)=pretension (1j1c>1); (b),(e),(h)=taut (1j1c=1), (c),(f),(i)=slack (10/1 <1);
(a),(b),(c)profiles; (d),(e),(f)=restoring forces; (g),(h),(i)=piecewise-linear restoring forces.
14
2.1 Piecewise-Linear Restoring Force
There are three mooring models according to the property of restoring forces
depending on the pretension in the mooring cable (Figure 2.2). They are: pretension, taut
and slack (Figures 2.2a, b and c, respectively). These configuration can be characterized by
the ratio of the initial distance of the sphere to the hinge connector on the wall (la) to the
original length of cable (4). Two cases, which consist of discontinuity in stiffness, are
pretensioned and slack cables (Figures 2.2a and c), and the configurations are expressed as
/0//, > 1 and 10/1, < 1 respectively. In the pretensioned cable, the discontinuity occurs when
the system moves beyond a certain displacement, where the cable in one side loses its
pretension and becomes slack while the other cable stays taut (Figure 2.2a). In the slack
cables, the discontinuity is due to the initial slack so that the cable has no restoring force
until the system reaches beyond a certain limit at which the cable becomes taut (Figure 2.2c).
Figure 2.2b represents the limiting case, in which the cable stays taut due to the strong
pretension. The restoring forces and the corresponding piecewise-linear systems of each case
(pretensioned, taut, slack) are represented (Figures 2.2d to I, accordingly).
As mentioned earlier, the benefit of the piecewise-linear system is its simplicity. The
multi-point moored structure in this study can also be described by a piecewise-linear
system. The mooring system of a limiting case, in which the cable retains the pretension to
keep the continuity in stiffness (Figure 2.2b), was intensively studied by Gottlieb and Yim
(1992). In their work, it was found that the mooring system shows the richness of chaos in
its response behaviors. By applying the piecewise-linear restoring force to approximate the
discontinuous stiffness of mooring systems, the system is now freed from the limiting case,
15
in which the cable is taut all the time. As shown in Figure 2.2, the piecewise-linear system
can be used not only for the limiting case, but also all the other possible cases in mooring
systems.
The advantage of using piecewise-linear system is obvious. Rather than individually
developing the system for each case, the piecewise linear system can be used to simulate the
various types of mooring systems, simply by changing the stiffness ratio of the system. For
the mooring system without pretension, in which there is a clearance inside the system due
to the initial slackness of the mooring cable, the piecewise-linear system can also be utilized,
by zeroing the inside stiffness.
As shown in Figure 2.1, the restoring force is locally linear. The nonlinearity comes
from the discontinuity in stiffness. The restoring force R(X) can be described as follows:
for X> A,
RV) = k:(X-A)+0,
(2.2)
for -A, X A,
R*(X) =
(2.3)
for X< -A,
R*(X) = k:(X+Ad-k:A,
where k* = inside stiffness, ko* = outside stiffness, Ac= critical displacement.
(2.4)
16
2.2 Excitation Forces
In this study, both deterministic and stochastic excitations are applied to the system.
In the deterministic case, harmonic excitations are employed.
For computational
convenience, the simplified and rescaled harmonic excitations are derived and used to
determine the response behavior in both parametric and time domain studies. In the
stochastic case, randomly perturbed harmonic excitation and narrow-band excitations are
applied to the systems to examine the response behaviors of the system under noisy
environments. Stochastic characteristics of the system behaviors are investigated, and
stability of the responses due to external perturbations are examined.
2.2.1 Deterministic Excitations
Due to the complexity of the waves, there is no exact procedure for calculating the
wave interaction with a ocean structure for all conditions of interest (Dean and Dalrymple,
1984). However, for "small bodies", the excitation force can be approximated by the well
known Morison equation.
In equation 2.1, the system is driven by a wave force F(t), which consists of an inertia
force (F1) and a drag force (FD).
F(t) = FJ +FD
(2.5)
The force per unit length according to Morison equation for the relative velocity model is
(Chakrabarti, 1987):
17
f
(2.6)
+fp
where
fr = CmAizi
CAAlie
(2.7)
fn = CDADLu-il(u-A;)
and u = water particle velocity, X = displacement of the system, Cm = inertial coefficient,
CA = added mass coefficient, and CD= drag coefficient. A, and AD are given by
=pD
2
AD =
,
4
1
pD
2
(2.8)
where p = mass density of water, and D = cylinder diameter. The total force on the body can
be obtained by the integral:
F = f fdz = f VilD)dZ
(2.9)
BL
For a progressive wave, the water surface displacement h,(x,t) is given by
h.,(x,t) =HIcos(k
-Qt)
(2.10)
2
where
= wave height, k' = wave number, L = wave length and Q = wave frequency.
To uncouple the wave excitation from the response, the wave profile can be evaluated
at the equilibrium position of the barge (X= 0), or can be averaged by integrating along the
length of the barge (1).
18
1/2
f cos(k/X-Qt)dX
havg(t) =
1
-1/2
(2.11)
2
The wave profile is now only a function of time:
hw(t) =A0 cos Qt
(2.12)
where
//'
.
sin
2 H'
(2.13)
2
2
The horizontal displacement p.(t) of a wave profile can be given by linear wave theory (Dean
and Dalrymple, 1984):
t)
cosh kl(h+z)
.
A0 s in Ot
(2.14)
sinh k h
where h = water depth.
For deep water waves (hIL > 1/2), the coefficient of horizontal displacement 11(0 can
be simplified to
coshkl(h +z)A
sinh k ih
Ao
coshklz
+ sinh k lz
= Aoe kiz
(2.15)
tanh klh
according to the asymptotic values of the tanh function (Chakrabarti, 1987). For large values
of x,
tanhx
1
(2.16)
19
This assumption is valid for x > it. Hence, equation (2.15) is valid since kh> it by assuming
hIL > 0.5. For the single-degree-of-freedom piecewise-linear system considered here, the
wave motion at the still water level (z = 0) is employed. Now the horizontal wave
displacement 1.t(t) can be expressed as:
p,(t) = AosinQt
(2.17)
The associated water particle velocity and acceleration can be given as:
u(t) = 11(0 = OA° cos Qt
(2.18)
ft(t) = 1:i(t) = -02Aosing2t
Substituting equations (2.7) and (2.18) into the integral (2.9), the wave force can be
represented as:
F = pV(1 +CA) Li -pVCA,t+i pApCD11141(u
(2.19)
where V = volume of the body, Ap= projected area of the body on a plane normal to flows.
The nonlinear drag term is often linearized with an equivalent linearization technique
(Sarpkaya and Isaacson 1981, Dao and Penzien 1982). It can be written as:
lu-X1(u-,Y)
(2.20)
With the linearized drag force, the total external force can now be written as:
F = pV(1 +CA)zi-pVCA+12 pApCDaf(u-,f)
(2.21)
20
2.2.2 Excitations with Random Perturbations
The system under the deterministic excitations with random perturbation is also
examined to determine the stability of the (periodic and chaotic) responses. The regular
wave profile with a random perturbation can be written as:
1 2 w(t) = AocosQt + ii(t)
(2.22)
where ti(t) is a zero-mean, delta-correlated Gaussian white noise.
By the definition of white noise, the frequency range of the noise ri(t) is infinite.
Because it is impossible to generate such a noise in practice, an alternative technique has
been employed to simulate the white noise.
A stochastic process -1",.(t) can be described as a sum of harmonics with given
deterministic frequencies and random amplitudes and phases (Kapitaniak 1988).
,v
1r(t)
=
EAkcos(vkt+I)k)
(2.23)
k=1
where Vk are constant, and Ak and (14 are random variables.
When N approaches infinite with deterministic amplitude Ak and the set of all
frequencies Vk in the interval (-., oo), equation (2.23) become a good approximation of a
Gaussian white noise. In computer simulations, only non-negative spectral density and finite
sets of frequencies (V
V 1) are employed to obtain a band-limited white noise.
A band-limited white noise can be written by the same expression in equation (2.23)
with deterministic amplitudes Ak and random frequencies Vk and random phase shifts oil)k as:
11(r) =
A kCOS (Vkt +4) d
k=1
(2.24)
21
which has a spectral density:
D`
So =
Vmax
for
V E {Timin,Vmax}
for
V
(2.25)
Vmi.n
0
{V min,Vmax}
where D2 = EN(t)21 = variance of TKO. The phase shifts Gk's are independent random
variables with uniform distribution on the interval [0, 27c]. The Amplitudes Ak's are
deterministic and given by Rice method (Shinozuka, 1977).
A
=
(2.26)
J2S0AV
where
V max
Vmin
.
N
(2.27)
The frequencies Vk are random as described in the Shinozuka method (Shinozuka 1977).
Vk = (k-0.5)AV-F5Vk+Vmin
(2.28)
where 5 Vk are independent random variables uniformly distributed in the interval [-Av/2,
v/2].
With the band-limited white noise rl(t), the elevation of the randomly perturbed
harmonic excitation can be expressed as:
h.(t) = A ocosQt +E A kCOS(V kt +4)k)
(2.29)
k-1
The velocity and acceleration can be obtained in a similar manner as for the deterministic
excitation. The resulting velocity and acceleration of the water particle u(t) can be expressed
22
as the summations of the deterministic components and random components of the N
harmonics in the band-limited white noise and can be represented as:
N
u(t)
( t ) + +E uk(t)
k =1
(2.30)
N
det(t) +E uk(t)
140
k =1
where
Udet(t) = OA cos Qt
(2.31)
/idet(t) =
02,40 sin Qt
The velocity and acceleration components of random noise can be written as:
uk(t) = A kVk
cosh k(h +z)
sinh kh
cos( Vkt +c)
(2.32)
u2 cosh k(h z)
k(t)
jikr k
sin( Vkt -1-(1)k)
sinh kh
By assuming the ratio kl L > 'A for each sinusoidal function of random perturbations,
relying on the deep water assumption, tanh kh z 1 is still valid and can be applied to equation
(2.32). The wave motion is considered at the still water level (z = 0).
Hence, as the case of
the deterministic excitation, the velocity and acceleration components can be rewritten as:
uk(t) = A kV kcos(V kt +4)k)
(2.33)
uk(t)
=
AkVk2sin(Vkt+t)
23
Since the frequencies are unifonnly distributed, the added randomness in both velocity and
acceleration can be approximated as a white noise, by taking the average of the amplitudes
of the sinusoidal functions over the frequency range [V,;, V,x].
(Vmax Vmm ) N
.
(t)
2
AkCOS(Vkt+(30k)
k=1
(2.34)
.12
(t)
v,n2_,
m2),N,
=
2
Aksin(vkt±(1),)
k =1
Finally, the total velocity and acceleration of the randomly perturbed excitation can be
expressed as:
u(t)
lidet(t)+,-/E Akcos(Vkt+C)
k =1
(2.35)
140
det(t)
r2E A ksin(Vkt+4)k)
k =1
where r1 =
r2 = (V (L2-Vnim2)12. Combining these expressions of velocity and
acceleration and the Morison equation, the forcing excitation can be obtained.
2.2.3 Narrow-Band Excitations
A random process is said to be narrow-band if its spectral density occupies only a
narrow frequency region. For many realistic conditions, the sea surface is assumed to be
composed of a large number of sinusoids, but with their frequencies near a common value.
This is called a narrow-banded sea (Dean and Dalrymple, 1991). In this study, narrow-band
24
excitations are considered in addition to monochromatic and randomly perturbed harmonic
excitations.
A narrow-band excitation can be conveniently described by using the summation of
sinusoidal function with the frequencies lying in a narrow frequency range.
,v
.(t)
=
EAkcos(vkt+c)
(2.36)
k=1
where the frequencies Vk is in the frequency interval [w,,, 6.),], and w,,
The narrow-band forcing excitation ((t) in equation (2.36) is assumed to be generated
by passing a white noise excitation n(t) through a linear, second-order filter (Roberts and
Spanos 1990). The linear filtering has the form
+2c6)0
+6)20(
= ri(t)
(2.37)
where n(t) is a white noise with a constant spectral level So. The spectral density Saco) of
narrow-band excitation can be then evaluated by
,S.(co) = 111(w)12S1(co) = 1H(G))12S0
(2.38)
where H(6)) is the frequency response function corresponding to equation (2.37). The
spectral density of excitation ((t) can be expressed
So
(G)20
+(32n(02
(2.39)
where wo = peak frequency, 13 = gnu)°, and So = noise intensity (spectral density) of the
white noisell(t). The damping coefficiento in the linear filtering controls the sharpness and
bandwidth of the spectral density of the filtered white noise excitation.
25
The zero mean process, specified in terms of its power spectrum, can be represented
as (Spanos and Agarwal 1984):
N
c(t) =
y/2 S'.(6)1) Au) cos (wit + (1)i)
(2.40)
To approximate the given narrow-band excitation (C) with a filtered white noise, it
is assumed that they have the same maximum magnitude of spectral density, peak frequency
and total energy (variance). For a given narrow-band process with known frequency interval
[como comad and variance oc2, the best fit can be then obtained from the following relations:
(.1)p
(0 max +CO mm
= (*kip
peak frequencies
(2.41)
peak spectral density
(2.42)
total energy (variance)
(2.43)
R2
Vrt
(2.44)
2
2
Sc(Wcp) =
Ci
)
LS./(CA)./
(1)
P
max
(min
A)
coma.
f S'.(6.))cick) =
f S (6)) da)
2
=
/
tom
with
(i)
=
2
1
Ct)o
2
So
(
S CO
C
2
2
(WO 6);)
2
n2
(2.45)
Pn(A)p
(2.46)
26
where subscripts cl and
stand for a given narrow-band process and filtered white noise,
respectively. The total energy (variance) is obtained by integrating a discretized spectrum
using Simpson's 1/3 rule (Gerald and Wheatley 1989).
For numerical simulations, the summation of finite terms of sinusoidal functions
using equation (2.40) is used. The linear filtered white noise in equation (2.37) is used in the
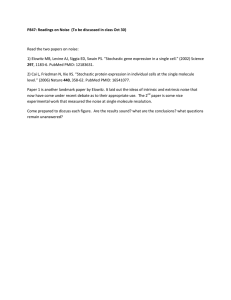
Fokker-Planck equation approach. An example of narrow-band excitation and corresponding
filtered white noise are shown in Figure 2.3. It can be seen that the spectra of narrow-band
and filtered white noise match quite well.
2.3 Governing Equations
The governing equations of motion of the systems with deterministic harmonic
excitations, harmonic excitations with random perturbations and narrow-band excitations,
are presented in this section.
2.3.1 Deterministic System
With regular wave excitations, the equation of motion (2.1) yields:
m s,t+csi+R(X)
= pV(1+CA)zi -pVCAi+-21 pApCDaf(u
(2.47)
By rearranging, equation (2.47) becomes
(1 s+PVC A)
+(c
sip)1 pC Da f)i +R(X) = pV(1 +CA) zi +pApCpcifu
(2.48)
27
120.00
100.00
80.00
60.00
40.00
20.00
0.00
0.00
2.00
3.00
frequency(w)
1.00
4.60
5.60
(a)
10.00
5.00
0.00
5.00
10.00
15.00
0.00
I
40000
200.00
time (t)
500.00
1
(b)
Narrow band excitaion and filtered white noise excitation 0( c2,_
Figure 2.3
= 10.125):
(a) spectral densities (dashed line = narrow band, solid line = filtered white noise), (b) time
history of narrow band excitaion.
28
where (0.5pApCDaf) is now interpreted as the hydrodynamic or fluid-damping coefficient
(Sarpkaya and Isaacson 1981), while c, represents a structural damping coefficient. For
convenience, the dimensional time is denoted as t*. Substituting equation (2.18) into
equation (2.48) yields:
(ms+pVCA)Y+(cs+2 1 pApCDaf)i+R(X) = Foisin(Qt *) +Fop cos(Qt *)
(2.49)
where
F01 = pV(1+CA)C22,40
(2.50)
1
FoD =
2
pA pC D a fglA 0
Equation (2.49) can then be rewritten as:
mX +cX +R(X) = F:cos(Qt +4))
(2.51)
m = ms+pVCA
(2.52)
iip,021_,F0D
(2.53)
where
c=c
+-1 pA
s
2
= tan
t
C a
PDf
(2.54)
Foi
(2.55)
FOD
29
The excitation force in equation (2.51) is now a harmonic sinusoidal function only dependent
of time since the wave force is assumed to act at the equilibrium position of the system as
a first order approximation and the nonlinear drag term is approximated by the linearized
drag coefficient. To simplify the analysis further, the equation of motion is normalized.
For -A, X A the equation of motion of the system is
mi-F4÷0(
= F:cos(Qt.+43)
(2.56)
where m = combined mass, c = combined damping constant, k, = inside stiffness, X =
displacement, Fo* = forcing amplitude, Q = excitation frequency, and 4) = phase angle.
Introducing new dimensionless variables x = X/AC, t = Qt* into equation (2.56) yields:
mQ2Aci+cclAci+k:Acx = F:cos(t+4))
(2.57)
After some algebraic manipulation, equation (2.57) can be converted into a non-dimensional
form.
P,
where
p2
x = F cos(t+14))
(2.58)
= c/ce, c, = critical damping constant = 2m6) 6), = (k/m), 13, = Q/co F0
F0 *I(mQ2A c).
In X> A the equation of motion of the system is
mi+4+ko(x-A c)+1c,
= Fo*cos(Qt +4))
(2.59)
Similarly as above for -A, X A, equation (2.59) reduces to:
mQ2A eie+cal ei+K °A cx-KOAC+KIAC = F:cos(t+4)
(2.60)
30
For convenience of analysis, damping is assumed to be linear. Hence c/m = gowo = 2 a),
while d = c,A2inw), and coo = K0/m). Equation (2.60) can be converted to
i+2p + p20: (x-1)+-1
= F ocos(t+11))
p2
(2.61)
where 13 = 13 a = Ko/K,. From now on, co, and 13 will be used for co 13,, respectively.
In X < -Ac, the non-dimensionalized equation of motion can be obtained in the same
manner:
a
i+2p x+(x+1)-= F ocos(t +4))
1
p2
p2
(2.62)
The non-dimensionalized restoring force R(x) can be expressed as
a
p2
R(x)
=
lx
p2
1
(x-1)+ = ak,(x -1)+k,
p2
=kx
(2.63)
a
1
(x +1)
p2
= ak,(x +1)-k,
The non-dimensionalized governing equation of motion of the system now can be
represented as:
i.+2
x+R(x) = Focos(t+(k)
p2
(2.64)
Note that equation (2.64) can be completely characterized by four parameters,
namely, damping ratio
stiffness ratio a, frequency ratio 13, and normalized excitation
amplitude F0. p represents the ratio of excitation frequency to the frequency of the proposed
31
linear system which is the system under small motion restricted inside critical displacement
A, with stiffness lc.
2.3.2 Stochastic System
Contrast to the deterministic system which only has a harmonic excitation, in the
stochastic case, the piecewise-linear system is driven by randomly perturbed harmonic
excitations or by narrow-band wave force excitations. The governing equation of motions
of the stochastic piecewise-linear system under both random excitations are derived as
follows.
2.3.2.1 System with a Harmonic Excitation with Random Perturbations
Using the Morison equation in the same manner as in the deterministic system with
water particle velocity and acceleration given by equation (2.35), the equation of motion with
the randomly perturbed excitation force can be obtained:
(ms+pVCA)i+(c +1p,4 CDaf ), +R(X)
3
2
=
pV(1+CA):/+12 p,4 C Da u
P
P
f
(2.65)
Rearranging equation (2.65) results in
mie+4+R(X) = Fd(t*)+Fr(t*)
(2.66)
where Fd(t* ) is a force due to the deterministic excitation and Fr(t*) is due to the external
randomness. Fd(t*) can be obtained in the same manner in equation (2.49). Using equations
(2.35), the force Fr(t*) can be expressed as:
32
1
F r(t *) = -r2 pV( +C A) E A ksin(V kt +(3, k) + r i pA C DA i.E A kcos(V kt
2
k=1
P
:1k)
k =1
(2.67)
Equation (2.67) can be reduced as:
N
F r(t *)
EA cos(V kt
(2.68)
k=1
where
2
\2
(r2pV(1 +CA))2 +( r 1-1
2pA pC DA.1.) A
A +k =
(2.69)
r2pV(1 +CA)
= Ckk +tan-1
(2.70)
r 1-1 pA pC Daf
2
From the definition of band-limited white noise, the rescaled new forcing term Fr(t*) due to
randomness in the wave profile is also a delta-correlated white noise with deterministic
amplitudes A* k and random coefficient Vk and (1).k.
The rescaled normalized stochastic differential equation of the piecewise-linear
system with a randomly perturbed harmonic excitation can be written as:
+2
02
x +R(x) = F ocos(t + CI)) +11(0
(2.71)
where ri(t) is a stochastic force and is assumed to be zero mean and delta-correlated white
noise:
<1(t)> = 0
(2.72)
<i(t)rgt 1)> =
33
where q is noise intensity parameter. For direct numerical simulations, ii(t) is approximated
by a band-limited white noise F ,(t) in equation (2.68).
Note that the variance of the Gaussian white noise 10 is
02
_ E[i(02]
R, (0) = fSiri(o))c/6)
= AT)
(2.73)
0
From equation (2.25), the variance of the band-limited white noise is given by
02 = E[T1(02] = S o(r /max
V
)
(2.74)
2.3.2.2 System with Narrow-Band Excitations
The system subjected to narrow-band excitation can be written as:
-2
p2
x +R (x) =
(t)
(2.75)
where C(t) is a narrow-band excitation. For numerical simulation, the equation of motion can
be rewritten as:
+2
p2
x +R(x) = E v2s((,),)6,6) cos(o),t+4),)
(2.76)
1=1
where Sc(w) = spectral density of narrow-band excitation.
With linear filtering approximation of narrow-band excitation, the system of
equations of motion can be written as:
34
= x2
XZ
= -2 1x2 -R(X) +
02
1(0
(2.77)
c,
C2
= -2cw0C,
coc,C1 + ri(t)
where rl(t) is a delta-correlated, Gaussian white noise as described before.
2.4 Approximate Piecewise-Linear Restoring Force of a Mooring System
As mentioned earlier, the nonlinear stiffness can be modeled as piecewise-linear
terms.
In this section, the restoring force of a mooring system is derived, and the
corresponding approximate piecewise-linear restoring force is derived.
2.4.1 Derivation of Restoring Forces
The mooring systems can be categorized into three types according to the stiffness
pattern depending on the pretension of the cables (Figure 2.2). The mooring system in which
the cables stay taut is selected for the comparison, since an experiment was carried for the
particular model (Yim et al. 1993). To maintain the continuous system stiffness, the
continuous restoring force (R(x)) is chosen (Gottlieb and Yim 1992), and this restoring force
retains their initial pretension (0, z 1). The plan view and profile of the experimental
model of mooring system considered is depicted in Figure 2.4.
It is assumed that, due to orthogonality, there are no displacements in x2- or x6­
directions. Rotation in the x4- direction does not affect deformation of the cable length 1,,R
35
(a)
(b)
Figure 2.4
Plan view and profile of the mooring system: (a) plan view, (b) profile.
36
x3
A
DX6
5
Xl
x4
Xl
Figure 2.5
Movements of sphere and cable: (a) 6 degree-of-freedom of sphere motion
(translational movements: xi, x2, x3; rotations: x4, x5, x6), (b) 3 dimensional configuration
of the spring cable.
37
because the cable is connected by hinge at the center of the sphere and it is free to rotate. It
is assumed that the cable is always taut by applying sufficient pretension (To) in the cables
at all time. The 6-DOF (degree-of-freedom) of system and the 3-Dimensional configuration
of the cables are shown in Figures 2.5a and b. respectively. From Figure 2.5b, the
projections of the displaced cable can be obtained as:
11
= b+xi
12 = d
(2.78)
13 = x3
where b = distance from body center to the connecting mooring point (pulley), and d =
distance from wall to connecting point on the sphere surface. The quantities 11,23 represent
the projection on the x1,2,3-directions, respectively. The origin of the reference coordinates
is located at the center of the sphere in the equilibrium position. The cable length on the left
side of the system can be obtained as follows for x where x is position vector.
(112 +122 +132)2
2
±x1)2 +x32) 2
(2.79)
In the similar manner, the right side displaced cable length can be obtained.
1
1R = (C12 +(b -X1)2 +X32)2
(2.80)
The restoring force can be derived by differentiating the potential energy (V,t,(x)) with respect
to displacement (x13).
d m(x)
R m(x)
dx
(2.81)
38
The potential energy due to the stiffness of mooring cable is given below.
VM(x) = 21 k(Ax)2
(2.82)
There are four cables connected, hence the total potential energy is
VM(x) = k(IL(Z)--1c)2+k(IR(i)--/c)2
(2.83)
where /, = original cable length without pretension. By introducing lc into the restoring
force, the pretension is taken care of, and the pretension (T0) can be obtained by
T
= k(1 op -1 c )
(2.84)
where lop = pretensioned length. The restoring force in x1,3-direction can be also obtained as
follows.
i
ax,
= 1, 3
(2.85)
The restoring force R(x) in xrdirection is
2b
IL IR
+IR
-2x
iLIR
1
(2.86)
1L1R
The restoring force R(x) in x3-direction is
R ( x ) =k
3
+1
c
2X
IL +1R
3
IL IR
where 1L, 1R are described in equations (2.79) and (2.80), respectively.
(2.87)
39
2.4.2 Approximate Piecewise-Linear Restoring Force
The restoring force of the SDOF mooring system in x1- direction can be described as
below.
R(x) =
+1
2b L 1R-2x IL +1R )1
(2.88)
The approximate piecewise-linear restoring force is
k 0(x +A c)k
R linear(x)
x 5_ Ac
A<x<A
kx
(2.89)
x>A
k o(x A c)+k
Because of symmetry, only the positive (or negative) region of Rh,,(x) is needed to
determine the corresponding approximate piecewise-linear restoring force. A least-square
method is used. For computational purpose, equation (2.89) can be expressed with only k
by introducing A, A0.
Rlinear(x)
For the region -A,.
x
Aok(x A c)+A, kA
(2.90)
Ac, the least square e2 is
e2 = E
(R(.J
j =1
)-AxJ
(2.91)
40
Equation (2.91) yields
N
= K 2E (4X+IcIXIX)2
e2
(2.92)
j =1
where
I=
2b
1L
lR 2x1L+1R
/L/R
(2.93)
1L1R
Minimizing the error c2 requires ac/ax = 0. Hence,
N
E
(4x2 +1
j=1
c
/X j)
(2.94)
N
EX 2
j=1
Similarly, in the region x A
e2
is
N
K
E2
2
E [4X
+1 c.1+A o (Xf
A )A A
)2]
l c
c
(2.95)
j =1
For E2 = 0, we get
N
E [4x,(x, Ac)+IcI(xjAc)X,Ac(xjAc)]
0
J=1
(2.96)
(xiA c )2
J=1
Using these coefficients, the stiffness ratio a of the approximate piecewise-linear restoring
force of the mooring system is given by
41
k
=
0
ki
(2.97)
Approximate piecewise-linear restoring forces are determined for both configurations
of 60° and 90° mooring systems (1F = 60°, 90°) and the corresponding piecewise-linear
restoring forces are found to match well with the given mooring systems (Figure 2.6). First,
approximation is made for 90° mooring system (Figures 2.6a and b). When there is no
pretension (///,, = 1), the system shows the highest nonlinearity (Figure 2.6a) and naturally,
the biggest approximation error occurs (e = 0.0658) at the location of discontinuity of the
stiffness. As shown in Figure 2.6b, nonlinearity in the restoring force decreases with larger
pretension (V, = 0.8). For the 60° configuration, the restoring force of the mooring system
is almost linear (Figures 2.6c and d). Even with a smaller pretension (00 = 0.8), the
restoring force is much more linear than 90° configuration under same pretension (Figure
2.6c). Finally, with a larger pretension, the 60° configuration system shows almost linear
restoring forces and the approximate piecewise-linear restoring force close to overlapping
the mooring restoring force with an error e = 0.00778. The stiffness ratio a becomes 1.1058
and with a = 1, the piecewise-linear system becomes a linear system. These results show
good usability of the piecewise-linear system.
For the SDOF system, during motion, the minimum length of the spring (/,,) can be
obtained as (see Figure 2.4):
1
.
min
= 1 sing'
(2.98)
42
R(x)
x
(a)
(b)
R(x)
R(x)
x
(c)
x
(d)
Figure 2.6
Comparison between mooring restoring forces (solid line) and approximate
piecewise-linear restoring forces (dashed line) with different configurations: 90° = (a),(b), 60°
= (c),(d); (a) 1,=1. , a=7.7677, (b) 1c=0.810, a=2.3191, (c)1,=0.81o, a=1.2659, (d)1c=0.51.,
a= 1.10580.
43
The mooring restoring force is developed under the assumption that the stiffness is
continuous. This can be ensured by letting minimum cable length 1, larger than the original
cable length I,. From this, the minimum pretension required can be obtained for V x EX by
To
T
=
1 -sing')
(2.99)
It will be shown in chapter 4 that with small stiffness ratio (a < 3), all the responses are
simple harmonic (see Figure 4.15).
44
CHAPTER 3. METHODS OF ANALYSIS
In general, the exact solution of a differential equation describing a nonlinear system
is not available (Hayashi 1985). Thus, although the piecewise-linear system can be explicitly
solved locally (since the system is linear in each region where the stiffness is constant x <
-1; -1 < x
1; x > 1), the response of the system over the entire region (xER) cannot be
represented exactly by a single analytical expression due to discontinuity in the stiffness. To
evaluate the global system response, numerical simulation is employed.
In the deterministic system, exact solutions for each region are derived and used to
verify the numerical algorithms developed. Several numerical and analytical techniques are
used to classify the characteristics of the system responses. Poincare maps as well as Fourier
spectra, time histories, phase trajectory and bifurcation diagrams are employed to determine
the system responses including harmonic, sub-harmonic and chaotic responses. These
techniques will be briefly described in later sections with some examples.
In stochastic systems, first, the overall effect of the noise is determined by applying
different levels noise intensity (variance <ri(t)2>). The stability of both perturbed periodic
and chaotic attractors are examined. Secondly, the stochastic characteristics of the system
behavior are studied by examining ensembles of the response processes. Stationarity and
ergodicity of the response processes are investigated by examining the ensemble averages
and covariances along with the first order probability density functions (PDFs) from
numerical simulations. The definition of stationary and ergodic processes are described.
Relaxed conditions for the stationary processes and conditions for weakly stationary
processes to be ergodic are presented.
45
A semi-analytical method is developed to predict probability distributions of the
stochastic responses. Statistics of the response of the piecewise-linear system is governed
by a nonlinear stochastic differential equation (SDE). Defining the fluctuating force rl(t) in
the SDE to be a zero-mean, delta-correlated white noise, the process of the stochastic
piecewise-linear system becomes a Markov process. The evolution of the PDFs of the
system responses can be obtained by solving the equivalent Fokker-Planck equations (FPE)
of the SDEs. The corresponding FPEs of stochastic piecewise-linear systems are derived and
solved by the path-integral procedure. The short-time propagators are derived for the
systems with both randomly perturbed harmonic excitations and narrow-band excitations.
Although the path-integral solutions are analytical expressions, it is necessary to use
a numerical method to evaluate the joint PDFs. Joint PDFs are obtained semi-analytically
using the path-integral solution in conjunction with an appropriate numerical scheme. By
analyzing the joint PDF of the response, the nonlinear behaviors of the systems can be
predicted in the probability domain. These methods and applications are presented here.
3.1 Deterministic System
The deterministic system is assumed to be under harmonic excitations. Since the
system contains locally linear stiffness, explicit solutions for the local regions are readily
available. Therefore, the global (analytical) solution can be derived using the local analytical
solutions.
46
3.1.1 Analytical Solutions
As mentioned earlier, the system consists of three locally linear systems. Thus it is
possible to obtain the analytical solution for each region. The equation of motion for each
region can be expressed as below.
For the region -1 s x s 1, the equation of motion (2.58) can be written as
x = F 0cos(t+0)
(3.1)
where co, is the natural frequency of the inside system ((...) = k,) and k, = 42. The solution
for the system inside the critical displacement (A,=1) is
x(t) = e
t
'
(A sincowit+Bcosw,dt)+psin(t+4)+0)
(3.2)
where
F0
P
kiV(1-62)2 +(go )2
8=
I
=
(3.3)
The unknown constants A and B can be captured from initial conditions (x(0), v(0)).
Assuming we have x(t0) = xo and v(t0) = vo, where x and v indicate the displacement and
velocity, respectively. The constants A and B are
47
-pcos(ck +0) -,-(,),(xo psin(4)+6))
v
A
°
(.0
(3.4)
id
B = x 0psin(4)+0)
For the region x ?_ 1, the equation of motion is
i +2W +ak i(x -1)+k = Focos(t +14))
(3.5)
For the region x -1, the equation of motion is
.i+gcoi+ak (x +1)
= Focos(t+430)
(3.6)
The solution for right (x > 1) and left (x < -1) sides of the piecewise-linear system are
x(t) = e
(A sincoodt+B coscoodt)+psin(t+43+e)+
1
1)a
(3.7)
where
F
P
k
02)2 +(200)2
80
=
1
0
0
= rk0 = ireTi
cood
(001/1e
e = tan-1
(
1
8.20)
goo
(3.8)
48
vo-pcos(4)+0)+G)(xo-psin(43,-Fe)-( -Jc-c))
1
A
(3.9)
od
B=x
psin(4) +0) -(1
and
x(t) = e
° (A sinwodt +Bcoscoodt)+psin(t +4) +0)
1-
1)
(3.10)
where p. too, cood, 0 are the same as in equation (3.8), and
vo pc o s(4) + 0) +
x psin(4) + 0) +(
1
A
(.0
B = x 0- psin(4) +0) +(1
respectively.
(3.11)
od
-1)
With these local analytical solutions, the global analytical solution of
piecewise-linear system can be determined by concatenation.
3.1.2 Numerical Algorithm
To simulate the system response, a fourth-order Runge-Kutta method is used along
with a Newton method. The Newton method is applied to pinpoint the time, displacement
and velocity when the barge crosses the position of stiffness discontinuity. The numerical
algorithm is illustrated in the Figure 3.1. While the system stays inside the critical
displacements, the system response can be obtained from the initial conditions by using the
inside system until it hits the upper boundary or lower boundary. The system can be
1
Figure 3.1
xi
Numerical solution procedure of piecewise-linear systems.
50
simulated by using either numerical method (Runge-Kutta method) or the analytical solution
of that region. When the response hits the right side critical displacement (As), the time (t1)
is obtained iteratively by the Newton method, and new "initial conditions", xl(t,), x2(tI) for
the right side system are obtained. To minimize numerical error, xl(t1) is substituted by xl
= A,. After the system crosses the boundary, the right side system is employed with the new
conditions until the response crosses the boundary again and back into the inside system.
The numerical solutions are found to be accurate by comparing to the exact analytical
solutions.
The same scheme is used in stochastic piecewise-linear systems. By definition, the
white noise has an infinite bandwidth of frequencies, but for simulating responses, it is
impossible to generate such a white noise. In simulations, the white noise is generated by
the summation of a finite number of sinusoidal functions with finite frequency bandwidth
(thus a band-limited white noise). The analytical solution of the piecewise-linear system
with band-limited white noise has additional N terms in the solution due to the N-number of
sinusoids. In stochastic systems, only numerical solutions are used to simulate the responses
for the computational convenience.
3.1.3 Techniques of Analysis
Various analysis techniques are employed to determine the system responses of the
piecewise- linear system. In particular, time histories are used to observe the characteristics
of responses along with phase trajectories in the preliminary investigations. Poincare maps
are employed to identify the system responses. These techniques of classification of system
51
responses are explained with the definition of a chaotic response of the dissipative system,
in this section.
3.1.3.1 Local Behavior and Hamiltonian
The states of a piecewise-linear system can be described as follow.
=X2
(3.12)
= -2x -R(x1)+Facos(t+430)
p2 2
The Hamiltonian of the piecewise-linear system considered has an unique equilibrium point.
To determine the (local) stability of the equilibrium point, an alternative linearized system
is examined as follows:
fli) =
(3.13)
0
X21
0
1
aR(xi)
= (0,0)}
axi
0
(3.14)
The linearized equation is
i(t) = Dflx e)x(t)
(3.15)
The equilibrium point turn out to be a center, and with damping, the system becomes
asymptotically stable.
52
The Hamiltonian can be defined via the following equations:
1
=
X2
= -R(x )
=
2
ax2
(3.16)
1
aX 1
The kinetic and potential energy can be obtained by integrating the Hamiltonian over the
independent variables x1 and x2.
=X
1
fallax2
ax 2
2
2
2
1
(3.17)
J aX
= fNxi)dx, = V(x) = H2
The potential energy V(x) depends on the location of the system due to the stiffness
discontinuities.
1
akx
-ak2 (1 +-1 )x +-1 aki(1 --1 )
a
2
V(x) =
1
a
2
kx2
-1 < x <
2
1
2
x>1
ak x 2 +aki(1 --1 )x+-1 k
a
a
(1 1)
a
1
(3.18)
x < -1
The Hamiltonian of the piece-wise linear system can be expressed as follows:
H=
x2 +V(x)
1
2
2
(3.19)
The nonlinear restoring force, potential and phase orbit are shown in Figure 3.2.
3.1.3.2 Classification of System Responses
The system responses are evaluated by numerical simulations, and time histories are
used for visual inspection of the system responses. Spectral analysis is used to determine the
53
15.00
10.00
5.00
n)
0.00
O
LL­
-5.00
0",
C
-10.00
cc -15.00
- 20.00
-3 00
-2.00
-1.00
0.00
1.00
displacement(x)
2.60
3 00
4.00 ­
2.00
>,
cr, 0.00
N
C
0
-2.00
C
(1) -4.00
O
-6.00
- 8.00
- 3 00
-2.00
-1.00
-1-rrrrr
0.00
1.00
2.60
3.00
displacement(x)
4.00
2.00
> 0.00
_
0 -2.00
0)
-4.00
- 6.00
- 300
-2.00
-1.00
0.00
1.00
2.00
displacement(x)
Figure 3.2
Restoring force, potential and Hamiltonian of the piecewise-linear system.
54
energy distribution of the system responses. Phase planes are examined to determine the
system orbits to classify the types of system responses. Fourier spectrum can be used to
verify both regular (periodic) and chaotic responses. Fourier spectra of chaotic responses
show a wide range of frequencies, which is typical of chaotic responses. Poincare maps are
used to determine the types of the system responses for both deterministic and stochastic
systems. For a given driving motion of period T, a Poincare map can be defined as a time
sampled sequence of points in the phase plane.
=
j(xn,yn)
(3.20)
yn,1 = g(xn,y,)
where x X(6,), y -= y(t) and t= nT+4
30.
In a parametric analysis, bifurcation diagrams are employed to identify the system
responses over a wide range of values of parameters of both system and excitation. The
normalized system has four dimensionless parameters, namely, damping ratio, stiffness ratio,
frequency ratio and excitation amplitude. Bifurcation occurs when a steady periodic solution
x0 becomes unstable at a parameter value and with the amplitude oscillating between two of
more values, the new solution has a integer multiple period of the previous solution x0.
3.2 Stochastic Piecewise-Linear System
It is likely that the structural systems will encounter random noise in real situations.
In the ocean field, the existence of randomness is inevitable. Thus response behaviors of the
systems under the presence of external noises, in addition to the deterministic wave force,
55
need to be understood. It is well-known that coexisting periodic responses of a system with
fixed parameters can occur upon perturbation in initial conditions. In externally perturbed
systems, which start from the fixed initial conditions, these coexisting responses may arise
due to external randomness. Potential existence of these coexisting responses and the
relative strength of the attracting responses are of primary interest in the analysis of the
response behaviors of the stochastic piecewise-linear system.
Stochastic forces are divided into two categories: 1) randomly perturbed harmonic
excitations; and 2) narrow-band excitations. The randomly perturbed excitation is defined
as a harmonic excitation with an additional Gaussian white noise, which is specified by its
noise intensity (variance). The narrow-band excitation is defined as a filtered white noise
with narrow-band limited frequencies.
Stochastic analyses are carried out in two approaches: time domain simulations and
probability domain estimates. In the time domain approach, pure numerical simulations of
the piecewise-linear system are employed. In probability domain approach, the path-integral
solution of FPE is developed, and the PDF of the stochastic piecewise-linear system is solved
semi-analytically.
The characteristics of the stochastic response processes of the system are investigated
using results of numerical simulations by examining ensembles and the 1st order PDFs.
Stationarity and ergodicity are also examined. The number of samples in the ensembles
varies from 60 to 6000. These results are compared to those from the semi-analytical
procedure.
To explore the stability and the probabilistic properties of the system responses, a
semi-analytical method is developed. The transition PDFs (short-time propagators) of
56
stochastic piecewise-linear systems are derived analytically by solving the associated
Fokker-Planck equation via path-integral solution. The evolution of the PDF of the
responses of the system is evaluated semi-analytically using the short-time propagator and
an appropriate numerical procedure. The FPE and path-integral solutions of the stochastic
piecewise-linear system are mainly discussed in the later sub-sections.
The governing equation of stochastic piecewise-linear system can be expressed as:
AO+ x(t)+R(x) = F(t)
(3.21)
where F(t) is a randomly perturbed harmonic excitation or a narrow-band excitation.
The equation of motion of the piecewise-linear system with randomly perturbed
harmonic excitation with band limited white noise with finite frequencies can be expressed
as:
1(t)+ x.(t)+R(x) = F cos(Ot +0)+E A kcos(V kt +11' k)
(3.22)
.1 =1
In numerical simulation of system responses, the scheme used in the deterministic
system is employed. The stochastic properties of the piecewise-linear system are analyzed
primarily using the results of numerical simulations. The FPE of piecewise-linear system
is investigated subsequently. In the following sub-sections, definitions of stochastic
processes and the methodology to identify the characteristics of the system process will be
presented.
57
3.2.1 Stationary Processes
An infinite set, or 'ensemble' of possible sample function, or 'realizations' are
referred as a stochastic (or random) process (Roberts and Spanos 1990). A stochastic process
can be expressed as a function of two arguments {x(t,o)); t E T, c E 0}, where S2 is the
sample space (Ochi 1990).
A random process is said to be stationary (in the strictly sense) if its statistical
characteristics are invariant under time shifts, i.e., if they remain the same when time t is
replaced by t+t, where t is arbitrary (R.I.,. Stratonovich 1967). It follows that the nth -order
PDF is such that:
fn(Xi; t1, x2; t2,
xn; tn) = fn(Xi; t1+t, x2; t2 +t, ...,xn; tn+t)
(3.23)
for any value oft.
From equation (3.23), as a special case, for n = 1, f1 is independent of t. It follows
that the mean value, m, is a constant, and also that all other statistics derived fromf, (x) are
constant. The standard deviation, a is also an constant. For the case with n = 2,f2 depends
only on the time difference (time shift t). An important consequence of this is that the
covariance function C(t1, t2) and the correlation function R(t,, t2) depends only on time shift
T.
C(t) = ER11(0MHT1(t+T)MN = R(t) m 2
where R(t) = E[i(t)i(t +t)] (Roberts and Spanos 1990).
(3.24)
58
The covariance function of two random variables x and y is denoted by Cov[x,y] or on,.
Cov[x,y] = ERx -m x)(y --my)] = E[xy]-E[x]E[y]
(3.25)
where m, = E[x] and my = E[y]. The correlation coefficient, or normalized covariance of two
random variables x and y, denoted by p, is defined as follows (Stratonovich 1967):
P=
Var[x]var[y]
Rxy-m m y
axy
Cov[x,y]
0
0x0y
(3.26)
y
The conditions for a strictly stationary stochastic process is that all the joint
distributions are invariant irrespective of time and requires all the joint PDFs available. A
more relaxed condition is stationarity 'in the wide sense' (or 'weakly' stationary), defined
through the auto-covariance function.
Analogous to the definition of the covariance of two random variables given in
equation (3.25), the auto-covariance function of a random process x(t), denoted by Cx.,(ti,t2),
is defined with respect to two random vectors x(tI) and x(t2) as follows (Ochi 1990):
C xx(t I' t 2) = COV[X(ti),X(t2)1 = ERX(ti) -E[X(td])(X(t2) -E[X(t2)])]
(3.27)
=
IE lx,r(td-i(t,)}{xko,2)-(t2)}
n k=i
where
x(t
= E[x(t 1)1
=
1 v..n
x k(t 1)
n k=1
(3.28)
n
x(t2) = E[x(t2)] = _E xk(t2)
n k_i
59
If C'Jti,t2) is a function of only the time difference (t241), irrespective of when t, is chosen,
then we may write the auto-covariance function as a function only oft (time difference = t2­
t1) as:
Covax(0,x(t+T)] = R(t)
(3.29)
A stochastic process is said to be weakly stationary (or covariance stationary), if its mean
value E[x(t)] is constant independent of time t, and its auto-covariance function
Cov[x(t),x(t+t)] depends only on t for all time t.
This definition is used to examine the stochastic processes of the piecewise-linear
system. Weakly stationarity of a stochastic process is determined by the observation of the
normalized covariance (auto-correlation coefficient) of the process.
The normalized
covariance function of the stochastic piecewise-linear system is as below:
p(t,t)
E[(x(t)x(t +T)]E[x(t)]E[x(t -FT)]
(E[x 2(t)] E[x(t)]2)(E[x2 (t +t)]E[x(t -1-t)]2)
(3.30)
3.2.2 Ergodic Processes
A stochastic process is ergodic if, in addition to all the ensemble averages being
stationary with respect to time, the averages taken along any single sample are the same as
the ensemble averages (Newland 1984). Hence, if the process is ergodic, the PDF of each
sample function is completely representative of the PDF of the ensemble.
One item
noteworthy is that the ergodic theorem was originally developed for a strictly stationary
stochastic process (Ochi 1990). However, in general, a stochastic process is said to be
60
ergodic if it has the property that sample (or time) averages obtained from an observed record
of the process may be used as an approximation to the corresponding ensemble averages.
Parzen derived the necessary and sufficient conditions for a sample mean to be
ergodic and showed the strictly stationary condition is not necessarily required (Parzen
1962). The necessary and sufficient conditions that the sample means of a stochastic process
be ergodic are as follows: Let C(t) be the tth sample mean mi and the tth observation x(t), then
the covariance function C(t) is
C(t) = Cov[x(t),M1] = 1
C.(s,t)
(3.31)
t 3 =1
The sample mean is defined as below:
MT
to =1
x(s)
(3.32)
The sample means are ergodic if and only if as the sample size t is increased there is less and
less correlation (covariance) between the sample mean M, and the last observation x(t). In
other words, if the covariance C(t) converges to the zero as the sample size t increases, then
the sample mean of a stochastic process is said to be ergodic if the process is weakly
stationary (Parzen 1962).
3.2.3 Mean Poincare Map
It is found that the noise effect on harmonic driven attractors usually eliminate the
fractal structure of the attractors and increases the dimensionality (Crutchfield et al. 1980 and
1981). As will be shown in a later chapter, the same trend is found in this study. Below a
61
certain level of noise intensity, the attractors are preserved. However, beyond a critical
noise, the structure of the attractor is lost and the response appears random.
These behavior requires an alternative approach to distinguish the chaotic attractors
in the response of nonlinear systems to combined regular and stochastic excitations.
Kapitaniak (1988) defined the concept of the mean Poincare map, which is described as
follows:
M(x(t)) = {(xi(t),x J(0)It=kT, k=1,2,...
(3.33)
where x(t) is the response solution of equation (2.13) and T is the excitation period. The
corresponding mean Poincare map of the stochastic system is described as follows:
(M(x(t))) = {((x,(t)),(xj(t)))1t=kT, k=1,2,3,...}
(3.34)
It is the ensemble average values of the Poincare sampled realizations of the stochastic
process. For noise intensity levels above which the fractal structure of an attractor disappears
in the phase plane, the mean Poincare map can be used to identify the attractor by averaging
out the noise effect.
A pictorial description of the technique to obtain a mean Poincare map by numerical
simulation is illustrated in Figure 3.3. The first mean Poincare point is obtained at the 1st
cycle of the excitation by getting the mean value of all the Poincare points of the realizations
and using this as the initial conditions for the next evaluation to average out the noise effect
(see Figure 3.3). The results of the mean Poincare maps will be shown in Chapter 5.
Poincare Sections
Starting Point
Figure 3.3
Poincare Points of
Each Sample
Mean Poincare Points
Illustration of generaging the mean Poincare map: 0 = landing points of each sample function; : mean Poincare points.
63
3.3 Markov Process Analysis
Stochastic processes can be classified into three categories (Risken 1984). They are
purely random processes, Markov processes, and general processes.
Purely random
processes have the conditional PDF P, (n Z 2) which does not depend on the previous values
x, =x(t,) (I< n) of the random value at earlier times t, < t. The processes is said to be general
processes if the PDF depends on the values of the random variables for at least the two latest
times. For Markov processes, the conditional PDF depends only on the value of the random
variable at only the latest time.
3.3.1 Markov Processes
A Markov process is a stochastic process which satisfies the following conditional
probability (Risken 1984):
P(xn,tnIxn_ptn_i;...;xpt) = P(xn,tnixn_ptn_i)
(3.35)
The conditional PDF at x(t) depends only on the value at x_1(t..1) at the right next earlier
time but not on any earlier values xn_2(t_2), xn_3(t_2),
x,(t1).
A general stochastic differential equation for N variables can be expressed as (I = 1,
2, ..., /V):
= h,(X,t)+g (X,t)r (t)
(3.36)
where X is an N-dimensional vector describing the state of the process at time t. h is a
deterministic force vector, and gy is the element of NxN matrix. Einstein's summation
64
convention is used in equation (3.36). The
(t) are Gaussian random variables with zero
mean and correlation functions proportional to the 8 function expressed as:
(Ij(t)) = 0,
where
(1',(t)r pi)) = 8u8(t-t
(3.37)
= Kronecker delta coefficient. With the Langevin force r(t), the process of the
stochastic differential equation (3.36) becomes a Markov process.
A formal general solution of the stochastic differential equation usually cannot be
obtained (Risken 1984). However, Kramers-Moyal expansion coefficients can be derived
to set up an equivalent FPE by which the PDF of the
D (n)(X,t) =
1/
lim
n! -r-0 ti
1
+t) X]n
(3.38)
All Kramers-Moyal coefficients higher than n = 2 are zero. Drift coefficients and diffusion
coefficients can be defined by:
D i(X,t) = lirn
1
t-o ti
t(t +it) -x ,(0> I
=x
(3.39)
D,(X,t)
=
1
lim <[x.(t+t)-xi(t)] [xj(t+t)-xj(t)]>
2 T-0
x k(t)=x
= Dji (X ,t)
where k = 1, 2, ..., N.
The stochastic differential equation of the piecewise-linear system with randomly
perturbed harmonic excitation can be expressed as:
xl
x2
-2-x,-R(x)+F
cos(t +0)+1(t)
0
p2
(3.40)
65
where ri(t) is assumed to be a delta-correlated Gaussian white noise. The process described
by equation (3.40) is Markov, because the stochastic force ri(t) is a 8-correlated Langevin
force. Hence, the PDF of the stochastic piecewise-linear system can be obtained from the
equivalent FPE.
3.3.2 Fokker-Planck Equation
The Fokker-Planck equation can be derived from the definition of the transition
probability that the PDF f(x,t+T) at time t+T and the probability density f(x,t) at time t are
connected by (TA):
f(x,t +t) = f P(x,t -Pr Ix 1,t)fix 1,0 dx
(3.41)
The nth moment can be described as:
Mn(x 1,t,t) = q(t +t)-(t)r)
By assuming all the moments (n
= f (x-x ) P(x,t +T I x 1,0 dx
(3.42)
1) known, the Taylor expansion of the characteristic
function can be obtained:
C(u,x
=
1
1 + 2_, 00 n A d n(X /,t,C)
n=1 n!
(3.43)
Taking the Fourier transform of the characteristic function yields the PDF (Risken 1984).
Thus, the transition PDF can be expressed by the moment Mn:
p(x,t+T ix /,t)
= [
1
t
/
t 1( --a ) nmjx,t,t) 0(xx
)
n=1 n!
ax
(3.44)
66
Using the Taylor expansion, equation (3.41) can be expressed as:
f(x,t +t) -f(x 1,t)
=
aat fix ,t)
+ 0 (T2)
(3.45)
Substituting (3.44) into (3.41) yields to
a
f(x,t +t) = f 1 +E
n =1
n!
n
mjx,t,t) 8(x -x
ax
00
a
(3.46)
n
lb (x -x 1)f(x ,t) dx I + E
n =1
f(x 1,t) dx I
ax
n!
f s(x -x /)[m jx,t,t) f(x ,t)dx I
Equation (3.46) now can be reduced to
jr(x
+t)
M n(x,t,t)
flx
ax
n=1
n!
Expanding the moments Mn in a Taylor series with respect to
f(x,t)
(3.47)
(n z 1):
Mn (x,t,t)
D °I)
n!
,t) t + 0 (r2)
(3.48)
and combining equations (3.48), (3.47) and (3.45) dropping terms including 0(t2), the
Kramers-Moyal expansion is obtained.
aflx,t)
at
)fl D (n)(x,t)f(x,t)
;s2-,
ax
(3.49)
The Pawla theorem states that for a positive transition probability P, the expansion
(3.49) will be sufficient with either the first term or the second term, otherwise, it must
contain an infinite number of terms. In the case where the expansion stops at the second
term, we have the FPE (Risken 1984):
67
a
( _)
2
aflX,t)
n,
at
n
D n) (x,r)flx,r)
ax
(3.50)
ax
D (x,t)fl x,t) +
a2
ax 2
D (x,t)flx,t)
u
where D,(x,t) and D (x,t) are Kramers-Moyal coefficients.
The FPE governing the PDF.AX,t) can be rewritten in a more general form with the
Fokker-Planck operator LFP(X,t) for N stochastic variables X:
atm°
at
LFp(X,t)f(X,t)
(3.51)
where the Fokker-Planck operator LFP(X,t) is
LFP(X,t)
a
=
ax
K (X,t)+ 1
a2
2 ax ax
Q (X,t)
(3.52)
with K,(X,t) and Q y(X,t) as the drift coefficient and diffusion matrix, respectively.
D ,(X,t) K i(X,t)
D
=
1
(3.53)
Q i(X,t)
2
The drift coefficients K,(X,t) and diffusion matrix Qy of the stochastic differential equation
(3.36) can obtained as:
K,(X,t) = h i(X,t)
(3.54)
Q u(X,t) = g ik(X,Ogik(X,t)
The transition PDF P(x,t1x1 , 1') is the distribution f(x,t) for the special initial condition
f(x,t') = 8,(x-r) satisfying equation (3.51). The FPE for the transition PDF can be written:
68
aP(X,tIX 1,t 1)
at
L Fp(X,t)P(X,t IX 14'1)
(3.55)
3.3.3 Path-Integral Solutions
In a previous section, the associated FPE is derived for the stochastic equation
(Langevin equation). The dynamics of the system can be formulated by describing the PDF
for observing a complete path of the system in phase space. By solving the FPE, the
evolution of the PDF is obtained. In recent years, major efforts have been devoted to derive
a formal solution of the nonlinear FPE in terms of a path-integral, which can provide an
approximate solution centered around the deterministic path (Wenner and Wolfer 1983).
Evolution of the probability over the entire paths of linear diffusion processes was
dealt previously by Onsager-Machlup, and later extended to nonlinear Gaussian process
solution of the corresponding FPEs, yielding the generalized Onsager-Machlup function.
The path-integral solution of the FPE has been developed in previous studies (Haken
1976; Graham 1977; Wissel 1979; and Wehner and Wolfer 1982). The formal solution of
FPE (3.51) can be written in terms of a functional integral:
x
fix ,t) = f Dp(x) exp
xo
r
ig(i(t 1), x(t 1))dt 1 f(x0' t0)
(3.56)
ro
where, Dp(x) is an integration measure and g is referred to as the Onsager- Machiup
functional. The path-integral solution employed in this study is derived as follows.
69
The discrete form of the path-integral solution can be written as (Wehner and Wolfer
1983):
n-1
i(X,t)
=
n-1
urn II f ...f (p.idxi)exp
T-0
1=o
j =0
g(x. x.t)
,, fix0, t
(3.57)
nt-t-to
For an infinitesimal time step T, the time evolution of PDF fcan be written in the following
form:
_IV ,t +.7) = f P
,t+TIX0' t 0 )1(X0' t 0 )d NX
(3.58)
where Pr(XX0) is the conditional probability for a small time r, called a short time
propagator. In equation (3.58), the volume element is denoted by
d Nx = dx dx2
1
dxN
(3.59)
and N integrations are performed over the N variables, although only one integration sign is
shown. X is the N-dimensional variable. Note that equation (3.58) is the ChapmanKolmogorov equation. By letting n
the PDF at time t = to+nt can be obtained as
n-1
f(X n,t) = urn II { fdziPT(Xi,i,Xi)}f(X0,t0)
n-0 i=0
ll
(3.60)
T-0
To determine the proper short time propagator P,(X,,-/ X,) requires matching of
equation (3.60) with the path-integral solution (3.57) of the FPE: P r(X,+1 I X,)= p exp [ -tg
(X,,,, X)]. For infinitesimal time step, the formal solution of the FPE (3.51) can be written
as:
70
./(X/,t+t) = [1 -1-tLFp +0(c2)]./(X,t)
(3.61)
The n-times iteration of equation (3.61) yields in the limit n
f(X,t) z
0 (Wissel 1979).
+ L Fpr z exp[L p(t -t 0)] f(X ,t 0)
(3.62)
The short time propagator can be obtained from equation (3.61) with the initial value
Po(Xxp).
P,(Xi,t+T 1X,t) = [1 +tLFP(X) +0(t2)] Po
(3.63)
For t = 0, the transition probability P has the initial value Po = 8(X -X), equation (3.63)
yields:
P,(1C/,t+t 1X,t) = [1 +TLFp(X)+0(t2)]
' -X)
(3.64)
where X and X represent the post state and previous state, respectively. The El function for
N variables is denoted by
8(x) = 8(x i)
8(x2)
8(xo
(3.65)
With the Fokker-Planck operator LFP, equation (3.64) can be rewritten as:
1 ,(X ,t 4-T 1X,t) =
/-X)
ic,(x)evi-xyr
1
a2
lf
2 a x ax
Q y(x) 0(x -X) t(3.66)
71
A variable transformation from X and X to the new variables U and V can be carried as:
U=
(3.67)
V = V(X ,X)
and equation (3.66) can be transformed into the following:
P (U,V) = 8(U)
8(1)(U) K i(V) + 8(U) K ,(`) (V)
(3.68)
LO(U)
Q,J(u)(
TO(1)( U)Q,./)(
+ TO('-')(u)
2
I(v)
'
where the superscripts / and j represent the derivatives with x, and xj respectively. The delta
function 8 can be expressed by the inverse Fourier Transform as follows:
8(U) = (27E)-N fexp [
d Nco
(3.69)
The derivatives of delta function with respect to x, and xj can be obtained by differentiating
equation (3.69).
8(')( U) = (2 Tc)-N
iR exp( iS2
d
(3.70)
8(1-1)(U) = (2E) N f
Qj exp (iSI U) d NSA
Substituting equations (3.69) and (3.70) into equation (3.67) yields:
1 t(U ,V) = (2n) -N f e 'Qu f; .01,V) d
(3.71)
where
.15 t(S2,v) =
1 itRx sv) +
c i(1)(v)+TQ ,i(v)(v)
itRQ i(j)(v)
TQ pi Q (V)
(3.72)
72
Note that equation (3.72) is the Fourier transform of P ,(U,V). By a first order approximation,
equation (3.72) can be rewritten as:
/IVO, V) = exp[ -itQ,Ki( V) + TK,Y)(V)+T-21--Q,(;))(V)
itS2,Q1)(V)-112piQ ij(V)] (3.73)
Substituting equation (3.73) into (3.71) yields
P t(U,V) = (27c)-N fexp{i TQ (V) Of -iR[TQ (!)(V)+TK,(V)+uj
(3.74)
+-C1C(1)( V) +-it
2
4/((i)
d NQ
By integrating the inverse Fourier transformation equation (3.74) over Q, the suitable short
time propagator can be obtained (Wissel 1979)
PJX/IX) = (27u)
II
ti
livii
--2
-1
tj
exp
2
(i)
(k)
ik +1(
xi) n (0 +K x -x
.1
/
(3.75)
1 rQr(y)
2
where II al is the determinant of diffusion matrix [Q,].
In the equation (3.75), the Qy and K, are still functions of U, V and need to be
transformed to the original variables X and X Hence, the short time propagator with X and
X can be written as:
73
N
P T(X /IX)
(27ET)
{
1
2 1101 2 eXp
Q,
71
1
(k)
2
(R)+K i(R)-
i
i
(3.76)
2
-aQ(1)(R)+K
11
-a TK
(R)--a Vi(u)(R)
2
where
R = aXi+bX
with a+b = 1 (0
a
1, 0
b
(3.77)
1).
In this study, an iterative numerical method is employed to obtain the path-integral
solution (Wenner and Wolfer 1983). For a single time step from time = t to t = t+t, equation
(3.60) can be written as:
flX1,t+t) = f P(X I,t+TIX,t)f(X,t) d NX
(3.78)
It is assumed that the PDF can be represented by a histogram as:
Mm
f(X,t) = E E E TT (xi -x ii) TC (x2 -x21) ... n(xN-xNi)./(Xot)
1/=1 2i =1.
where f(X,) =fix1,x2,
(3.79)
Ni =1
xN) is defined as the average probability in the range, and M is the
maximum number of discretized intervals. n(x-xk) is defined as:
1
TECX
0
for xi-
1A
1
Ax i- <x <x i +LAX
2
2
otherwise
1
where Axi = xi+1-x1
(3.80)
74
After dividing each variable ofXinto number of MI,M2, ..., MN segments respectively,
the ith segment of it' variable is denoted as .x,(,) for I = 1,2, ..., N and j = 1,2, ..., M,. The
equation (3.78) can be expressed as summation using the discretized histogram (equation
3.79).
M2
M1
EEE
fl(X k ,t +T) =
A4N
j1 =1 12-1
Tk!(X k,x itycx /,t)
(3.81)
1N
where superscripts k, 1 represent the post-state and pre-state, respectively, and the variables
Xk and X are
X k = { X ik (t ±T),X2k (t +t), ..., X Nk (t +t)}
XI
=
(3.82)
1
xil(t), x2 ( t),
xN1(t)
The propagator tensor Tki(t) is defined as:
T kl(C) =
k
(A_
k."'"
A_
A_ k
-1) +"""1(idik"-k.2(i2 -1) 1-`4"4" 202))
1(1
dx
V-1-/V(iN 1) +"'"'N(iN))
f
k
'114(2)
IVO
xoo+
l
2
xN(IN)*
Xri(IN)-
Ax I
k
NON)
x202)+
.Nk(1N-1)
2
X N(1 'V)*
Az(I
A..,2 (/2- I)
1
2
x2u2)
2
X2(12 -1)
2
2
dx2...
x10)-
k
X202)
NUN)
2
dxk
k
1(11-1)
k
As
dx 2k
k
x101)­
k
x202)+
k
k
Air 2k0'2)
0
k
xi(ii)+
dxN
P(X ,t+TIX,t)
t
.rA,ciN)
2
(3.83)
75
Propagation of numerical errors can be minimized by taking advantage of the
normalizability of both the distribution function and the propagator function (Wehner and
Wolfer 1983). Specifically, the errors can be reduced by normalizing both propagator tensor
and newly obtained PDF in the following manner.
Because the short time propagator (transition PDF) P(X, t+r IX,t) is also a PDF,
.+ -
X-,AX li
fdx/p(xf,t+Tix,0 =
2
E
f
fdxii
xii-
lir li-I
X2i-
2
NI NI
Xm+
2
2
dx2 ....
dxNi
(3.84)
JAN, -1
AX21-1
2
=1
XXI­
2
Thus, for the short time propagator,
E Tikr)
(3.85)
2
After the numerical integration,
Ax+Ax.
&xi +Lc i -1
(
)E
.
2
2
)-1)A
J
(3.86)
and the transformation becomes
Ty
'vile Cr)
A (Ax ,Ax ,T)
(3.87)
I
Similarly, the error from the summation in equation (3.82) can be reduced using the property
of the PDF. The sum of the obtained probability mass function is given by:
76
E E ...E fi(yk,t)
= 1 +E
(3.88)
IN
The integration of exact probability distribution over thr should become unity. Hence, the
discrete representation is renormalized as:
fold
fnew(X k ,t)
(3.89)
1 +E
By using the renormalized PDF to evaluate next step, the truncation error can be reduced.
3.3.3.1 System with Randomly Perturbed Harmonic Excitation
The equations of states of the piecewise-linear system with randomly perturbed
harmonic excitation are
zl
X2 =
= x2
(3.90)
-21x
-R(xi)+Focos(t+0)+r1(t)
R2 2
where TO) is a zero-mean, delta-correlated white noise, i.e. <r)(t)> = 0 and <r)(t)ri(ti)> =
r). The corresponding FPE can be obtained by the drift and diffusion coefficients
aatflx,t) = ax--a (x2f(x,o-)-{( -2
axe
132
x2 -R(x 1)+F0 cos(t +1)jf(X,t)1+ q
a
2 ax22
(3.91)
where q is the noise intensity. The corresponding short time propagator Pr(XcY) is
77
,
PTV , x2; t +ti x , x2; t)
/
1
= (21tt)-lq 2 exp
2 --x 2 R(x 1)+F0 cos(t +(D)
p2
x2 X2
(3.92)
/
2
e.
0 (x2
X1
X1
where {x/, x21} and {x1, x2} are the post and pre state variables, respectively.
3.3.3.2 System with Narrow-Band Excitation
The equations of state of the piecewise-linear system under a narrow-band excitation
are
X
I
= x2
2 -ip2 x2R(xi) +C1(t)
(3.93)
(2
=
(2 0002( +71(t)
where ((t) is the narrow-band excitation, approximated by the linear filtering and 71W is a
delta-correlated, Gaussian white noise. The FPE associated with equation (3.93) is
a
Ax,t) =
at
a
AX,t))
2
(
ax2
2 lx2 R(x 1) +C(t)) f(X,t) --a (c2(x,t))
ac,
2
(3.94)
ac2
{(-2(,),(2-(.0,(,)fix,t)]+-9-' ±3Ax,t)
2 a(22
From the given FPE, the short-time propagator of the system with narrow-band excitations
can be obtained:
78
1
2
t
1 yi yi
2
-2c6)0C2 -6)0C-
P.,(xl,x2,gi,g2;t+Tlx1,x2,CpC 2) = (27t)-2 q 2 eXp
(2 -C
2
}
T
ck,
o(C2-
T
/
)6(
/
-2x2-R(x1)+CI X2 -X2)8(X2
p2
T
X1 -X1
)
T
(3.95)
79
CHAPTER 4. DETERMINISTIC SYSTEM
The response behaviors of both deterministic and stochastic piecewise-linear systems
are investigated, and results are presented in this chapter and the next chapter, respectively.
For the deterministic system, the characteristics of nonlinear response behaviors and effects
of system parameters are investigated. Various sets of parameters are examined to determine
the (attraction) domains of particular responses. Effects of randomness on the responses
found in the deterministic systems will be examined in the stochastic analysis.
Typical nonlinear system behaviors in the responses including dependence of natural
frequency on initial conditions and vibration amplitude (frequency response curve) of the
system will be examined. Results of numerical simulations will be compared with
approximate solutions.
The nonlinear systems are known to exhibit interaction of the natural frequency and
displacement amplitude.
Another classical property of nonlinear effect is the jump
phenomenon. If the amplitude of the excitation is held constant, there exists a range of
forcing frequencies for which multiple response amplitudes are possible (Moon 1987).
These two significant features of nonlinearity are shown in Figure 4.1. By applying different
initial conditions to the undamped free piecewise-linear system, the corresponding natural
vibration frequencies are found.
The approximate expression of natural frequency of the undamped free vibration of
the piecewise-linear system by Nayfeh (1979) is adopted to confirm the numerical results.
It is observed that the numerical result and the approximate solution are practically identical
(Figure 4.1a), thus validating the numerical method.
80
16.00
12.00
a)
E
a)
8.00
fU
4.00
0,00
1.00
1.53
2.05
111111111111TM
2.58
3.10
natural frequency (coo)
(a)
1.50
1.00
0.50
**. ....
0.00
,
0.50
2.40
............
**1
4.30
1'1'r
6.20
8.10
normalized forcing frequency (C)/(o.)
(b)
Figure 4.1
Nonlinear phenomena of the piecewise-linear system: (a) comparison of
approximate and numerical solutions in the interaction of initial displacement (x10) and natural
frequency (solid line=approximate solution, dashed line=numerical solution); (b) frequencyresponse curve of a damped piecewise-linear system (=0.03, a=10).
81
The frequency-response curve is obtained by increasing (or decreasing) the input
forcing frequency with a fixed amplitude. It delineates the jump phenomenon in the
response amplitude and reveals potential coexisting responses (Figure 4.1b). These two
results show the nonlinear effect of the system induced by the stiffness discontinuity.
Sensitivity of the system responses to perturbations in initial conditions is
demonstrated with two responses of a chaotic system shown in Figure 4.2. As expected, the
piecewise-linear system shows distinct sensitivity to the initial randomness. Time histories
starting from two slightly different initial conditions diverges from each other (Figure 4.2a).
This is more precisely seen when comparing the phase trajectories. Two responses stay
together for a brief moment from the beginning, but eventually, each response follows a
separate trajectory orbit (Figure 4.2b).
4.1 Responses of the Piecewise-Linear System
Several types of system responses are obtained by varying different sets of
parameters. The characteristics of these responses are examined analytically. Both regular
responses (including periodic, subharmonics and superharmonics) and chaotic responses of
the piecewise-linear system under harmonic excitations will be studied. Examples of these
responses are depicted in time histories, phase trajectories, Fourier spectra and Poincare
maps to demonstrate methods of identifying the responses.
82
3.00
1.50
-3.00
111 I
0.00
7.87
i
I
I
1
f
I
l
I
1
Fr
15.75
23.63
31.60
-0.18
1.06
2.30
time (t)
(a)
-4.40
-2.65
i
i
i
i
i
i
I
I
-1.41
(b)
Figure 4.2
Sensitivity of the piecewise-linear system to the initial perturbations g=0.03,
a=10, (3 =1, F0=4.5): initial conditions (x0i, )(02) of solid line = (0, 0); dashed line = (0.1, 0);
(a) time histories; (b) phase trajectories.
83
4.1.1 Regular Responses
Regular responses are denoted by P-N responses, where P-N stands N multiple
periods of the excitation. Hence, a P-2 response is one with period equally to twice that of
the excitation. Several examples of regular responses are delineated to demonstrate their
characteristics.
Resonance (P-1) and subharmonic responses (P-2 and P-4) are shown in Figure 4.3.
The P-1 response shows the harmonic motion in the time history and the phase plane
(Figures 4.3a and b). In the phase plane, P-1 response shows a simple, closed orbit,
indicating a periodic motion with one Poincare point (Figure 4.3b). Observe that the peak
resonance occurs at the same excitation frequency in the Fourier spectrum (Figure 4.3c). A
P-2 response shows a 2-T period in the time history, and the orbit has two loops (Figures
4.3d and e). The spectrum shows the appearance of a subharmonic resonance at 1/2 of the
excitation frequency (Figure 4.3f). As the response period increases, it becomes difficult to
visual identify the period of the response from the time history and phase orbit alone (Figures
4.3g and h). By counting the Poincare points in the phase plane, the period of the response
can be determined, and the P-4 response shows four Poincare points (Figure 4.3h). The
subharmonic resonance appears at 1/4 of the excitation frequency (Figure 4.3i).
4.1.2 Chaotic Responses
Time histories, phase trajectories and Fourier spectra can be employed to infer the
presence of chaotic responses. However, the Poincare map gives definite evidence by
showing a fractal structure of the strange attractor in the phase plane (Moon 1987). A
84
4.00
2.50
V\ V
1/5
2.00
-3.50
0.00
-6.00
V V
V
V
0.00
C;',
- 1.25
-200 /
-250 8707..0
.........
'8722111
5784.8
8770.3
- 4.00-2
-9.00
-12.00
000
-125
(a)
1.25
2.00
-5.00
o.00
0.00
I
1
1
3.90
r,
400
''''5.00
4.00
5.00
(c)
000
1
1
2.00
normalized frequency
4.00
I
1.00
(b)
2.50
I
'''''''''''''''''
1
a)
t -600
0
-
A
2.50
3707.0
3722.5
- 2.00
3738.5
3754.3
3770.0
-9.00
- 4.00
-250
-1.25
0.00
0.00
125
(d)
1.00
(e)
2.50
4.00
1.25
2.00
0.00
0.00
2.00
3.00
normalized frequency
x1
(f)
0.00
zr>
g -6.00
0
-1,25
A
2.50
3707.0
r
3722.8
- 2.00
3738.5
3754.3
3770.0
400
-0.00
.. ,
-250
Vx'xi
x1
(g)
(h)
1'25
2.80
-12ao'
0.00 o
;:60
2.00
i:60
4.6 0 5.Oo
normalized frequency
(i)
Figure 4.3
Various regular responses (C-0.03, a=10, 13=1): (a), (b), (c) harmonic
response (F0=2.7); (d), (e), (f) P-2 response (F0=3.1); (g), (h), (i) P-4 response (F0=3.23);
(a), (d), (g) time histories; (b), (e), (f) phase trajectories; (c), (f), (i) Fourier Spectra.
85
chaotic response of the piecewise-linear system is shown in Figure 4.4. The time history
shows a random-like motion from the completely deterministic system, and the phase
trajectory fills the space. These are typical indications of chaotic motions (Figures 4.4a and
b). The Fourier spectrum reveals a broad-band spectrum, which also indicates the possible
presence of chaotic responses (Figure 4.4c). Finally, the chaotic response is clearly detected
from the inspection of the Poincare map (Figure 4.4d), which shows the strange attractor in
the phase plane. In the following analysis, Poincare maps will be used mainly to characterize
the system responses.
Throughout this study, it is observed that the piecewise-linear system has rich
nonlinear behavior in addition to the regular responses. Additional analysis of various types
of responses will be given in a parametric study.
4.2 Parametric Analysis
In this section, the effect of the parameters of both system and excitation are
examined. Note that the system can be completely determined by four non-dimensionalized
parameters: damping ratio &, stiffness ratio a, frequency ratio 13, and normalized excitation
amplitude F0. The analysis is based on the bifurcation diagram of the system responses
obtained from numerical simulations.
Period-doubling processes are also examined from the bifurcation diagrams with the
damping ratio and excitation amplitude as parameters. Figure 4.5 shows the cascade of a
periodic solution to a chaotic response as the bifurcation parameters increase or decrease.
In Figure 4.5a, as the damping ratio decreases, the system response period doubles at certain
86
3.00
5.00
3.00
1.00
1.00
CN
-1.00
-1.00
-3.00
1
-3.00
7414.00
7454.00
5.0D
7494.00
7534.00
I
-300
',III
-1.00
I
/1111111.11.111.1
1.00
3.00
x1
(a)
(b)
-0.00
4.00
J
-2.00
2.00 -3
-4.00
1
4.5
0
-6.00
X C.00
-8.00
-10.00
-2.00
-12.00
-14.00
0.00
2.00
4.00
6.00
8.00
normalized frequency
(c)
10.00
4.00
0.00
0.50
1.00
1.50
,
2.00
I
2.50
xl
(d)
Figure 4.4
Chaotic response of the piecewise-linear system (=0.03, a=10, (3 =1, F0=4.5):
(a) time history; (b) phase trajectory; (c) Fourier spectrum; (d) Poincare map.
87
4.50
0.00
I
I IT 0.10
!III(
0.20
damping ratio
(a)
2.30
x 1.35
cn
O
0-1.40
.
0.50
III,'
3.00
... ......
I
II
3.60
3.80
excitation amplitude
4.00
(b)
Figure 4.5
Period-doubling processes in bifurcation diagrams: (a) varying damping ratio;
(b) varying excitation amplitude.
88
values of
This phenomenon continues until a critical value
beyond which the response
loses its periodicity and becomes chaotic. The same trend applies to the bifurcation with
increasing excitation amplitude (Figure 4.5b). It is found among the observed bifurcation
diagrams that the system response does not necessarily double the period at every
bifurcation, but can also triple the period. After several bifurcations, the response may return
to a regular motion with one of the shorter periods again, and then continue bifurcating to
chaos (Figure 4.5b). In the region of chaotic responses, the subharmonic appears irregularly,
showing the narrow windows of higher periodicity between the chaotic responses in the
bifurcation diagrams.
The period-doubling phenomena are illustrated in 2-D phase planes and Fourier
spectra.
Here, bifurcation behavior with decreasing damping ratio is demonstrated.
Bifurcations of the system response, starting from a regular response to P-8 response are
shown in the phase plane and Fourier spectra (Figure 4.6). With a damping ratio
= 0.3
(Figures 4.6a and b), the system shows a P-1 harmonic response and the Fourier spectrum
shows the resonant frequency 6)0 at the excitation frequency. (Note that the frequency is
normalized, thus the excitation frequency is unity.) At
= 0.275, the response period
doubles and becomes a P-2 response (Figures 4.6c and d). Two Poincare points appear, and
the loop of phase trajectory doubles that of the P-1 response. In the Fourier spectrum, a new
subharmonic resonant peak at V2 of main resonant frequency takes place. This appearance
of subharmonics cojn (n = 1, 2, 3, ...) is known to be a precursor to chaos (Moon 1987). It
can be seen that in addition to the dominant frequency wo and subharmonics wo/n, harmonics
of this frequency are also present in the form, mcooin (m = 1,2,3, ...). As the damping ratio
decreases
= 0.265, P-4 response appears with four Poincare points and subharmonic
89
4.00
2.00
0)
X 0.00
0
n
2.00
12.3
4.00
-2 50
1.13
0.25
1.63
0.0
3.00
1.0
2.0
3.0
4.0
3.0
4.0
normalized frequency
(b)
4.00
0.D
2.00
CN,
0.00
0
a­
-3.0
-2.00
4.00
-2 50
-12.0
I
- 1.13
0.25
1.63
,
0.0
3.00
1.0
2.0
normalized frequency
(d)
4.00
0.0
2.00
-4
C-N>,
0.00
0
-3.0
2.00
4.00
-2 50
-12.0
-1.13
0.25
1.63
3.00
x1
(e)
Figure 4.6
0.0
,
1.0
2.0
3.0
normalized frequency
4 .0
(0
Cascade of period-doubling processes with the decreasing damping ratio in the
phase plane and Fourier spectra: (a), (b) P-1 response (E=0.3); (c), (d) P-2 response
(E=0.275); (e), (f) P=4 response (E=0.2575).
90
frequency at 1/4 appears (Figures 4.6e and f). With an even smaller damping ratio ( =
0.2575), the response period doubles again and becomes a P-8 response. The phase
trajectory fills more of the phase plane with eight Poincare points, and the spectrum shows
the frequency at 1/8 (Figure 4.6).
4.2.1 Effects of Varying Stiffness Ratio
The stiffness ratio a is defined as the ratio of the outside stiffness k0 to the inside
stiffness k,. Observations are made by examining the time histories and the phase orbits of
the system. The response amplitude curves and Fourier spectra are generated and compared
to determine the response behaviors with increasing discontinuity of the system stiffness.
An extensive parametric analysis between stiffness ratio and excitation amplitude is also
conducted.
The phase diagrams of undamped free vibrations with various stiffness ratios (a) are
represented in Figure 4.7. For a = 1, the system is linear and the response shows a circular
trajectory (Figure 4.7a). As the stiffness ratio increases (a = 10), the phase portrait becomes
roughly elliptical (Figure 4.7b), and for large stiffness ratio (a = 100), the trajectory becomes
much more elliptical (Figure 4.7c). With an extremely high stiffness ratio (a = 1000), the
critical displacement (x = Ac) becomes a boundary and the response bounces back to the
inside with the same magnitude of velocity in the opposite direction, mimicking the motion
of an impact (Figure 4.7d). Therefore, nonlinearity of the system increases with stiffness
ratio, and with high values of a, the system becomes an impact system.
91
2.00
2.00
1.00
1,00
0.00
^ 0.00
._
(.)
(7)
(1)
(1)
0 -1.00
0 -1.00
- 2.00
-3.00
-300
- 2.00
-200
-100
0.60
displocement(x)
1.00
3.00
-300
2.00
-2.00
-1.00
0.00
1.00
2.00
0.00
1.00
2.00
displocement(x)
(a)
(b)
2.00 ­
2.00
1.00
1.00
0.00
0.00
_0 -1.00
0 -1.00
Q)
(1)
>
-2.00
- 3.00
-300
-2.00
-2.00
-1.00
0.00
displocement(x)
(c)
1.00
2.00
- 3.00
-300
-2.00
-1.00
displocement(x)
(d)
Figure 4.7
Phase trajectories of undamped free vibrations with various stiffness ratios:
initial conditions (x10, x20) = (0,2); (a) a=1 (linear system); (b) a=5, (c) a=10, (d) a=1000.
92
The time histories and phase trajectories of forced, damped systems with various
stiffness ratios are examined, and sample responses are depicted in Figures 4.8 and 4.9,
respectively. With stiffness ratios a = 1 and a = 5, the system shows harmonic responses
(Figures 4.8a and b; and Figures 4.9a and b). As expected the forced linear system (a = 1)
shows the symmetric harmonic motion in time history, and a perfect circular phase orbit in
the phase plane. Comparing the harmonics of the linear and the piecewise-linear systems,
the latter with a slightly high stiffness ratio a = 5 starts to exhibit nonlinear effects by
showing a break in the smooth, symmetric harmonic wave motion (Figures 4.8b and 4.9b).
With a = 8, the system shows subharmonic motion; and both time history and phase
trajectory begin to exhibit complex response behaviors (Figures 4.8c and 4.9c). As will be
shown in the parametric analysis, with stiffness ratio a < 7, the piecewise-linear system only
exhibits two subharmonic responses out of the total 102 responses examined, but it shows
many subharmonic responses when the stiffness ratio becomes a z 7. Finally, when the
stiffness ratio approaches a = 10, the system reveals the chaotic response (Figures 4.8d and
4.9d).
From observation of the time histories and phase diagrams, it is found that as stiffness
ratio increases, the system shows higher nonlinear behavior. The response amplitude curves
and Fourier spectra for each response of the systems with different stiffness ratios are
generated to inspect the effect of the ratio of the discontinuous stiffness. Fourier spectra and
response amplitude curves for each stiffness ratio are then placed in the same plane to give
better visual information in the 3-D view (Figure 4.10). In Figure 4.10a, the Fourier spectra
of the system responses with various stiffness ratios are shown. With a = 1, the system
shows a resonant frequency at w = 1, as expected. When the stiffness ratio increases (5 z a
93
3.00
100.00
2.00 11
50.00
1.00
ij
0.00
0.00
X
X
1.00
-50.00
2.00
-100.00
3.00
-150.00
7477.00
7492.75
- 4.00
7477.00
,
7508.50
t
7524.25
7540.00
,
7492.75
(a)
7508.50
7524.25
7540.00
(b)
2.00
3.00
1.00
2.00
1.00
0.00
1
0.00
`--"x
-1.00
X
' .00
2.00
-2.00
3.00
4.00
7477.00
3.00
7492.75
7508.50
7524.25
7540.00
4.00
7477.00
7492.75
(c)
7508.50
7524.25
7540.00
(d)
Figure 4.8
Time histories of the piecewise-linear systems with various stiffness ratios
3 =1, F0=4.5): (a) P-1 harmonic response(a=1: linear system); (b) P-1 harmonic
response (a=5); (c) P-2 response (a=8); (d) chaos (a=10).
94
4.00
100.0
2.30
50.0
0.00
CN
X
CV
0.0
X
2.00 -1
1
-50.0
11,
4.00;
-100.0
- 100.0
-50.0
0.0
50.0
6.00
100.0
-4 00
x1
-2:25
1.25
x1
(a)
(b)
4.00
4.00
2.00
2.00
0.00
0.00
CN
X
X
-2.00
-2.00
-4.00
-4.00
-6.00
-4 00
-2.25
-0 50
6.00
1.25
3.00
Ilf,1TIIIIIIITTT1111111ITT
-4 00
-2.25
-0.50
(c)
1.25
3.00
x1
x 1
(d)
Figure 4.9
Phase trajectories of the piecewise-linear systems with various stiffness ratios
(=0.03, 3 =1, F0=4.5): (a) P-1 harmonic response(a=1: linear system); (b) P-1 harmonic
response (a=5); (c) P-2 response (a=8); (d) chaos (a=10).
95
/
C ..­
2
cz:V
-.7
7-......--.
Zi c_....
,,,
C- j.......
(a)
(b)
Figure 4.10
Increasing nonlinearity of the piecewise-linear systems with varying stiffness
ratios (----0.03, F0=3): (a) surface view of the Fourier spectra; (b) surface view of frequency
response curves.
96
> 1), additional harmonics with the same frequency start to appear in the form of (2m-1)w
(m = 1, 2, 3, ...), the odd integer multiplication of the primary resonant frequency. This is
a well known nonlinear phenomenon. At a = 6, additional harmonics now appear in the
form of mw, indicating a loss of the symmetry in the system response. Notice also that the
dominant frequencies are not changed, except a slightly reduced amplitudes. Subharmonics
with frequency (,)/2 appear at a = 10 with the additional subharmonics in the form of mw /2.
From observation of Fourier spectra, linearity breaks as soon as the discontinuity of the
system stiffness is reached, even with the small ratio (a = 2), by showing the additional
harmonics in the higher frequency range. As the stiffness ratio increases, subharmonics
appear, and the system becomes highly nonlinear.
In Figure 4.10b, the response amplitude curves are presented for the systems with
different stiffness ratios. The same trend found in the Fourier spectra can be seen from the
response amplitude curves. As stiffness ratio increases, the jump phenomenon becomes
more clear while the response amplitude curves are folded further with the higher stiffness
ratios. From these results, it may be conclude that with the higher stiffness ratio (a » 1), the
system becomes highly nonlinear, with more complex responses including subharmonic and
chaotic responses. This will be illustrated in the parametric map later.
Besides regular responses and chaotic responses, there exist another type of non-
periodic and non-chaotic response called quasiperiodic motions. They results from the
existence of incommensurate frequencies in the responses. These quasiperiodic motions are
also found in the responses of the undamped or slightly damped piecewise-linear systems
with lower stiffness ratios. Such motions can be identified by the continuous closed figures
or orbits in the Poincare maps.
In Figure 4.11, two quasiperiodic responses are
97
12.00
8.00
6.00
4.00
X -0.00
c\X
-6.00
-12.00
-9 00
0.00
-4.00
-4.50
0.00
4.50
-8.00
-2.00
9.00
x1
-o.00
2.00
x1
(a)
(b)
7.00 =
4.00
3.50
2.00
C\lx -0.00
(Nx
-3.50
0.00
-2.00
t-AP`tt:
-7.00
-5 00
-2.50
0.00
2.50
5.0D
-4.00
1.00
2.00
3.00
x1
(c)
Figure 4.11
system
4.00
x1
(d)
Quasiperiodic responses of the piecewise-linear systems: (a), (b) undamped
a=3, 13=1, F0=4.5); (c), (d) slightly damped system (=0.0001, a=4, 3 =1,
F0=4.5); (a), (c) phase orbits; (b), (d) Poincare maps.
98
a
20
1
1
C
C
C
C
C
C
C
C
1
1
1
1
1
I
1
19
1
1
C
C
C
C
C
C
C
C
I
1
1
1
I
1
1
18
1
3
3
3
C
C
C
C
C
1
1
1
1
1
1
17
I
3
C
2
1
C
C
C
C
C
1
1
1
1
1
16
1
3
1
3
1
C
C
C
C
C
C
1
I
1
1
15
1
1
1
1
3
C
C
C
C
C
C
C
C
1
1
14
1
6
C
1
3
1
1
2
3
1
C
C
C
C
C
5
C
13
1
1
2
C
3
1
1
2
1
3
3
C
C
C
C
C
C
12
1
3
7
3
C
1
2
1
1
1
3
3
C
C
C
11
1
1
4
3
3
C
C
C
C
C
C
2
2
2
2
10
1
1
2
C
C
C
3
3
C
C
C
C
C
C
C
C
C
9
1
I
1
6
4
8
1
1
I
3
1
2
7
1
1
1
1
1
1
1
1
1
1
6
1
1
1
1
1
1
1
1
1
5
3
1
1
1
1
1
1
1
4
1
3
1
1
1
1
1
3
1
I
1
1
I
I
2
1
1
1
1
1
1
1
1
1
1
2
2.5
3
3.5
CI
CI
CI
CI
CC
CC
CCCCCC
CCCCC
CCC
3
3
2
3
9
3
3
3
C
1
1
1
2
20
2
2
1
1
1
1
1
I
I
1
1
1
1
1
1
1
I
I
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
I
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
4
4.5
5
5.5
6
6,5
7
7,5
8
8.5
9
9.5
10
Fo
Figure 4.12
Distribution of the responses of the piecewise-linear system on the parametric
map of stiffness ratio a and excitation amplitude Fo (---0.03, = 1 ) .
99
demonstrated. The undamped system with a low stiffness ratio (a = 3) shows the typical
quasiperiodic motion (Figures 4.11a and b). The trajectory keeps wandering in the same
pattern, but never completes the closed orbit in the phase plane (Figure 4.11a). The Poincare
map shows a complete closed curve in the phase plane. This motion can be interpreted as
the motion occurs on a torus, and as the quasiperiodic motion fills the surface of the torus
on the Poincare section (Figure 4.11b). The response of a lightly damped system with the
stiffness ratio a = 4 is given in Figures 4.11c and d. The phase trajectory somewhat mimics
a subharmonic motion (Figure 4.11c), and the Poincare map shows four orbits in the phase
plane (Figure 4.11d). It is found that these quasiperiodic responses only take place in the
system with the lower stiffness ratios (a s 7) and very low damping
s 0.0001). As will
be seen, with higher stiffness ratio, the lightly damped system shows either regular response
or random-like response, exhibiting a cloudy shape in the Poincare maps.
In this section, a parametric map of stiffness ratio and excitation amplitude is
obtained to demonstrate the effect of the stiffness ratio to the system behavior. The
parametric map is generated by applying various stiffness ratios and excitation amplitudes
with fixed damping and frequency ratios
= 0.03, (3 = 1).
Figure 4.12 shows the domain of the occurrence of various types of system responses
for the given sets of stiffness ratios and excitation amplitudes. With stiffness ratios (1 < a
s 6), all systems have harmonic regular responses except two subharmonic responses (2 out
of 102, or approximately 2%). At a = 7, the system starts to show more occurrences of
subharmonic responses (4 out of 17: 24%), but no chaotic responses appeared. With higher
stiffness ratio (a z 8), chaotic responses appear along with harmonic and subharmonic
responses. This trend continues as the stiffness ratio increases. The parametric analysis
100
indicates that with a lower stiffness ratio, there is no chaotic response, while with a higher
stiffness ratio, there are many chaotic and subharmonic responses along with harmonic
regular responses. This leads to the conclusion that higher stiffness induces nonlinearity
behaviors. The system shows the most chaotic responses with the stiffness ratio a = 10.
From this point forward, the system with a = 10 will be considered, unless otherwise
specified.
4.2.2 Effects of Varying Damping Ratio
The effects of damping is investigated this section. Figure 4.13 shows the results of
parametric analysis of the system responses with various damping ratios and excitation
amplitudes. Here, the stiffness and frequency ratios are held constant at a = 10, p = 1. The
number of occurrences of chaotic responses among the total responses is about 60% versus
40% of the regular responses. The frequency of occurrence of chaotic responses with a
particular damping ratio stays almost constant until damping reaches
= 0.18. Then, the
frequency of occurrence of chaotic responses becomes lower, as the damping ratio becomes
higher than a magnitude
z 0.19. When the damping ratio increases beyond a "critical"
value of = 0.26, no chaotic response is encountered. This effect can be clearly seen from
the bifurcation diagram (Figure 4.11a), which shows that as damping ratio increases, the
responses lose chaocity and become periodic. This may imply that the chaotic responses die
out due to high damping. For a typical structural system, the damping ratio
is less than
20% (Clough and Penzien, 1975). Within this range of damping ratios, the piecewise-linear
system is rich in chaotic response. Further investigation of the effects of damping is
101
1
1111111
1
1 11111111 1
0.3
1
0.29
1
0.28
1
1
I
1
1
1
1
1
2
2
0.27
1
1
1
1
1
1
1
2
4
0.26
1
1
1
1
1
I
2
4
8
0,25
1
1
1
1
I
2
4
0.24
1
I
1
1
1
4
0.23
1
1
1
1
4
C
012
1
1
1
1
0.21
1
I
1
4
6
0.2
1
1
2
C
0.19
I
1
4
0.18
1
1
0.17
1
0,16
2
2
2
2
2
2
2
2
4
4
4
4
4
4
4
8
8
I
C
C
C
CC
10 CC
6
C
C
C
8
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
8
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
C
I
C
C
C
C
C
C
C
C
C
C
C
C
C
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
0,15
1
3
C
C
C
C
C
C
C
C
C
C
C
C
C
0.14
1
2
9
C
C
C
C
C
C
C
C
C
C
C
3
0.13
1
2
C
C
C
C
C
C
C
C
C
C
C
C
C
0.12
1
4
C
C
C
C
C
C
C
C
C
C
C
C
C
011
1
4
C
C
C
C
C
C
C
C
C
C
C
C
C
0.1
1
4
C
C
C
C
C
C
C
C
C
C
C
C
C
0.09
1
4
C
C
C
C
C
C
C
C
C
C
C
C
C
0,08
1
4
C
C
C
C
C
C
C
C
C
C
C
C
C
0.07
1
CC
7
C
C
C
C
C
C
C
C
C
C
C
0.06
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
0.05
1
C
C
C
C
C
C
C
C
C
C
C
C
C
C
0.04
2
C
C
C
C
C
C
C
C
C
C
C
C
C
C
0.03
2
C
C
C
3
3
C
C
C
C
C
C
C
C
C
0.02
2
C
6
C
3
3
C
C
C
C
C
C
C
C
C
0.01
2
C
5
C
3
3
C
C
C
C
C
C
C
C
C
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
8
8.5
9
9.5
10
2
2.5
1
1
CC
Fo
Figure 4.13
Distribution of the responses of the piecewise-linear system on the parametric
map of damping ratio and excitation amplitude F0 (a= 1 0, (3 =1)
102
6.0D
6.00
4.00
4,00 ­
2.00
2.00 ­
>
22 0.00
0 OD
U
U
> -2.00
-2.00
4.00
-4.00
71.)
- 6.00
-1 00
-0.60
1.60
2.60
displacement(x)
-1 00
3.00
1.00
2.00
displacement(x)
(a)
3.00
(b)
6.00
6.00
4.00
4.0D
2.00
2.00
%.:-'??1
2.; 0 00
._
U
00D
'''i ''''.,Z,..4."'
CJ
T.' -2.00
> -2.00
-4.00
-6.00
-1 00
,A,'
:
TD
41f
-4.00
-o.00
1.60
2.00
displacement(x)
6.00
-1 00
3.00
-0.00
1 00
2.00
00
2.60
3.60
displacement(x)
(c)
(d)
6.0D
6.00
4.00 ­
4.0D
2.00
2.00
0.00
0.00
U
U
-2.00
> -2.00
-4.00
-4.00
-6.00
-1 00
-0.00
1.00
2.00
displacement(x)
3.00
-6.00
-1 00
-0.00
1.00
displacement(x)
(e)
Figure 4.14 Effect of damping to the system responses with various damping ratios (a=10,
3=1, F0=4.5): (a) undamped =0; (b) =0.001, (c)
(d)
(e)
(0 =0.21.
103
conducted from undamped to highly damped systems in Poincare maps (Figure 4.14). As
mentioned before, with undamped or lightly damped systems, the Poincare maps of chaotic
motions appear as cloudy shapes (Figure 4.14a and b). Without damping, the Poincare
points are randomly scattered in the phase plane (Figure 4.14a). Even though damping is
very light with = 0.001, the attractor starts to contract, showing strangeness (Figure 4.14b).
With a damping ratio = 0.01, the Poincare map shows a more distinct structure in the phase
plane (Figure 4.14c). With = 0.03, the Poincare map clearly shows its infinite set of highly
organized points arranged in parallel lines (Figure 4.14d). When the damping ratio reaches
higher values, the chaotic attractor starts to shrink rapidly, but still showing the fractal shape
= 0.1; Figure 4.14e). Finally, the system response becomes regular with a larger damping
ratio of
(Figure 4.140.
From these results, it can be said that damping in a certain ranges induces the chaos
of organized Poincare points. Also, it can be said that high damping suppresses chaos. From
here forward unless otherwise specified, only chaotic responses of dissipative systems will
be considered.
4.2.3 Effects of Varying Frequency Ratio
From the parametric map (Figure 4.15), it is observed that when the frequency ratio
is lower than [3 = 0.5 and higher than [3 = 2.2, all the system responses are harmonic.
Between these two frequencies, various responses are encountered. Most chaotic responses
are concentrated in the range of frequency between p = 0.8 and 13 = 1.1. A small portion of
chaotic response are found at 13 = 0.5 and p = 0.6, when the system is subject to large
104
p3.0
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2.9
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2.8
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2.7
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2.6
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2.5
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2.4
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2.3
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2.1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2.1
3
1
1
1
5
1
1
1
1
1
1
1
1
1
1
2.0
1
5
1
1
1
1
1
1
1
2
2
2
1
1
1.9
1
1
1
2
2
1
1
1
1
1
1
1
1
1.8
1
2
1
1
1
1
1
1
1
1
1
1
1.7
2
1
1
1
3
3
3
3
1
3
1
1.6
1
1
3
3
1
1
1
1
1
1
1,5
3
3
3
1
1
1
5
1
5
1.4
3
9
1
1
1
1
1
1
1.3
1
1
1
1
1
1
1
1.2
1
1
1
1
1
1
1.1
1
1
1
1
2
c
1.0
1
1
2
0.9
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
3
1
3
3
3
3
3
3
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
5
5
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
7
1
1
1
1
1
1
1
1
3
3
1
3
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
5
5
1
1
1
1
3
1
1
1
1
2
2
2
2
2
2
3
2
3
3
3
3
3
3
c
c
c
c
3
3
3
2
2
2
2
4
ccc 3
cc
ccc cccc
3
c
c
c
c
c
2
1
1
1
3
c
c
c
cecccccccccccl
3
ccc ccc
ccoccccec
cc
c
c
c
1
1
1
1
1
3
1
1
c
cc
c
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2
cc
cc
0.8
1
0,7
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
0.6
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
0.5
1
1
1
1
1
1
1
1
1
1
1
3
1
1
1
1
1
1
1
1
1
1
c
3
c
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
0.3
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
0.2
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1F01
2
2.5
3
3.5
4.5
5
5.5
6
6.5
7
7.5
8
8.5
0.4
0.1
4
9
9.5
10
1 ccccc
10.5
11
11.5
12
12.5 13
13.5
14 14.5
15
Figure 4.15
Distribution of the responses of the piecewise-linear system on the parametric
map of frequency ratio p and excitation amplitude F. (a=10,
105
4.00
2.00
CN
-2.00
-4.00
I
0.00
I
I
I
I
I
I
I
1
f 1111[111111[1111111
1.00
0.50
.1
1.50
2.00
1.50
2.00
x1
(a)
4.00
2.00 =
0.00 =
CN
x
-2.00
-4.00
-6.00
0.00
.1,111,1
0.50
Figure 4.16
Chaotic responses of the systems with different frequency ratios ( =0.03,
a=10): (a) 13=0.5, F0=14; (b) p=0.6, F0=13.
106
amplitude excitations.
Hence, it can be concluded that the chaotic responses of the
piecewise-linear system take place mostly when the excitation frequency is near the natural
frequency of the proposed linear system. For this reason, most cases considered in this study
have the frequency ratio p = 1, unless otherwise specified.
Two chaotic responses of the systems with different excitation frequencies are shown
in Figure 4.16. With different frequency ratios, the fractal structures of the chaotic attractors
are radically different. In this study, it is found that the shapes of the chaotic attractors
depend on the excitation frequency.
4.2.4 Effects of Varying Excitation Amplitude
The influence of varying excitation amplitude on the system responses is described
here using Figures 4.12-15. Observe that with lower stiffness ratio (a = 10), higher
excitation amplitude induces more chaotic responses, and that with higher stiffness ratio,
lower excitation amplitude induce more chaotic responses (Figure 4.15). For a stiffness ratio
a = 10, chaotic responses occur above excitation amplitude F0
3. Chaotic responses do not
occur under excitation with the amplitude Fo < 2. Thus, it can be concluded that chaotic
responses requires sufficiently large force (and associated nonlinearity in the response) to
appear. With higher damping, the system needs a larger excitation amplitude to generate
chaotic responses (Figure 4.13).
107
CHAPTER 5. STOCHASTIC SYSTEM
In this chapter, the responses of the stochastic piecewise-linear system described in
Chapters 2 and 3 are investigated. Two models of stochastic excitations:
random
perturbations, and narrow-band excitation are considered.
From observations of the deterministic system responses, it is found that the
piecewise-linear system exhibits various types of nonlinear responses. The (stochastic)
stability of these anharmonic responses can be investigated by introducing an external (noise)
fluctuation to the otherwise periodic excitation. Subharmonic and chaotic responses found
in the deterministic systems are examined by applying various noise intensities to the system.
From the results, the strength of both periodic and chaotic attractors are analyzed and the
influence of noise to these anharmonic responses and bifurcation are examined.
Mean Poincare maps of chaotic responses are generated with varying noise intensities
and compared to the regular Poincare maps of the deterministic and stochastic chaotic
responses. The capability of the mean Poincare maps to reveal the embedded chaotic
responses in the presence of higher noise levels is examined.
In the stochastic process analysis, stationarity and ergodicity of Poincare sampled
processes of chaotic responses are investigated. Using ensembles and realizations of
Poincare sampled processes, stochastic analyses are conducted to determine the statistical
properties of the responses.
The joint probability density function (PDF) j(xl, x2) of system responses (xl, x2) are
evaluated by using the PIS procedure. Steady-state joint PDFs are compared to the Poincare
maps of their counterpart deterministic responses. By observing the evolution of probability
108
distributions, both subharmonic and chaotic responses are examined in the probability
domain. Coexisting responses are also examined via the PIS, and stability and relative
strength of the coexisting responses are studied. The responses of system with narrow-band
excitations, is also discussed.
5.1 Effects of Excitation Random Noise
In this section, the effects of noise intensity on the response behaviors of the system,
with randomly perturbed harmonic excitation, are examined by observing the realizations
and the ensemble averages. As noted in a previous chapter, the deterministic piecewise­
linear system is found to have harmonic, subharmonic, and chaotic responses, according to
the parameters of both system and excitation under harmonic excitation. By introducing
noise with various intensities to the system under harmonic excitation, stability and relative
strength of both periodic and chaotic attractors, and characteristics of system behaviors in
the presence of noise are investigated.
Results of direct numerical simulations are used to classify the characteristics of the
stochastic system responses. Phase trajectories, Poincare maps and bifurcation diagrams
with and without the presence of noise in the external excitation are employed to demonstrate
the effects of the noise on the system responses. For convenience, the ratio of the standard
deviation of the applied external white noise to the forcing amplitude (lc = D/Fo) in
percentage is used to describe the noise intensity with a combination of standard deviation
D in the comparisons.
109
5.1.1 Noise Effect on Periodic Attractors
The phase planes and Poincare maps of responses with and without noise are
examined to determine the effect of noise on periodic responses. It is observed previously
from the deterministic responses (Chapter 4), that the system responses bifurcates under
increasing forcing amplitude (Figure 4.11c). To determine the effects of noise, two types of
periodic responses are examined. By increasing the intensity of the noise applied to the
systems, the strength of the periodic attractors, and the behavior of the system responses
under noisy excitation are examined.
First, the subharmonic response (P-2 response) away from the bifurcation is
examined (Figures 5.1 and 5.2). When the noise intensity is small (lc = 0.1%), it is observed
that the phase trajectory is hardly disturbed at all and is almost identical to the deterministic
periodic response from the phase trajectories (Figures 5.1a and b). This trend holds until
noise intensity reaches up to x = 1% while the phase trajectory is slightly expanded (Figure
5.1c). With higher noise intensity (K = 2%), the path of the trajectory becomes wider, but
still stays close to the periodic path (Figure 5.1d). When the noise intensity increases beyond
= 3%, the system response loses its P-2 subharmonic periodicity, and heads toward a
coexisting harmonic response (Figure 5.1e). Finally, with very high noise intensity (K =
10%), periodic behavior fades and the system shows only random response (Figure 5.10.
This trend is more readily visualized in the Poincare maps (Figure 5.2). The
counterpart deterministic P-2 subharmonic response shows two Poincare points (Figure
5.2a), and when noise is applied to the system, the Poincare points start to scatter (Figure
5.2b); but again they are not visually noticeable. With high noise intensity, the points scatter
110
>
10.00
10 00
5.00
5.00
0.30
0.00
-5.00
O -5.00
10.00
10.00
3)
15.00
-10.00
5.30
displacement (x)
- 5.00
0.60
15.00
10.00
-10.00
-5.00
0.00
5.00
displacement (x)
(a)
10.00
(b)
10.00
5.00
>
0.00
O -5.00
- 10.00
-10.00
-5.00
0.00
5.00
displacement (x)
-15.00
-10.00
10.00
0.00
5.00
V.66
5'.66
displacement (x)
(c)
>
-5.00
10.00
(d)
10.90
10.00
5.00
5.00
0.00
O
O -5.00
0.00
O -5.00
-11./
-10.00
- 15.00
-10.00
10.00
5.00
-5.00
0.60
5.00
displacement (x)
(e)
1000
-15.00
-10.60
displacement (x)
1000
(0
Figure 5.1
Effect of noise intensity to a P-2 periodic response away from bifurcation to
chaos in phase planes (Z=0.03, a=10, 13=2, F0=6.5): (a) D=0, (b) D=0.0065 (K=0.1%), (c)
D=0.065 (c=1%), (d) D=0.13 (K=2%), (e) D=0.195 (K=3%), (f) D=0.65 (K=10%).
111
6.00
6.00
1
2.00
2.00
U
O
O
(1.) -2.00
ai -2.00
-5.00
-6.00
t
2.00
4.00
6.00
8.00
10.00
displacement (x)
2.00
4.00
6.00
5.00
10.00
5.00
10.00
displacement (x)
(a)
(b)
6.00
6.00
4,
2.00
2.00
0
O
0) -2.00
-2.00
I
2.00
4.00
6.00
8.00
displacement (x)
-6.00
10.00
2.00
4.00
6.00
displacement (x)
(c)
(d)
6.00 ­
6.00
2.00
2.00
ru -2.00
75 -2.00
O
O
2.00
-6.00
4.00
displacement (x)
(e)
1 O. 00
2.00
4.00
6.00
eTT,ITI
rTTITM
6.00
displacement (x)
10. 00
(0
Figure 5.2
Effect of noise intensity to a P-2 periodic response away from bifurcation to
chaos in Poincare maps (=0.03, a=10, (3=2, F0=6.5): (a) D =O, (b) D=0.0065 (K=0.1%), (c)
D=0.065 (K=1%), (d) D=0.13 (K=2%), (e) D=0.195 (c=3%), (f) D=0.65 (K=10%).
112
.00
4 00
DO
2.60
2.40
2.60
1.20
" 120
1.20
0 -0.20
0 -020
a -010­
-030
3.00
130
0.50
displacement(x)
2.50
-0 50
(a)
030
1.50
displacement(x)
2.50
3.00
-050
(b)
.00
2.60
2.60
2.60
-34 I 20
-7. 1.20
,3. 1.20
0 -020
0 -0,2D
2 -020
-0.50
030
1.50
displacement(x)
2.50
-0 50
(d)
030
130
2.50
1.5o
2.50
(c)
.00
'5
0.50
displacement(x)
130
displacement(x)
2.50
-030
030
displacement(x)
(e)
(0
4.00
.00
DO
230
2 60
2.60
1.20
1.20
00 -020
0 -0.20
170
3.00
-0 50
0.50
1
50
displacement(x)
(g)
230
3.00
-0 50
0.50
1.50
displacement(x)
(h)
2.50
"°030
0.50
1.50
displacement(x)
(i)
Figure 5.3
Effect of noise intensity to a P-2 periodic response near bifurcation to chaos
in Poincare maps (=0.03, a=10, 13=1, F0=3): (a) D =O, (b) D=0.003 (K=0.1%), (c) D=0.03
(K=1%), (d) D=0.06 (K=2%), (e) D=0.09 (K=3%), (f) D=0.12 (K=4%), (g) D=0.15 (K=5%),
(h) D=0.3 (K=10%); (i) deterministic chaotic attractor after the bifurcation.
113
much further and start losing the periodic attractor; but stay close to the periodic attractor
(Figure 5.2c). As expected, with an even higher noise intensity, the response shows
increasing loss of strength of the two subharmonic attractors (Figure 5.2d). When the noise
intensity increases beyond the limit, the subharmonic loses its stability, and another
harmonic attractor appears (Figure 5.2e). Finally, it is observed that the periodic attractor
disappears when the noise intensity goes beyond a critical level (Figure 5.20 and the
Poincare points show a cloud-like random distribution in the phase plane.
The result is different when the various noises are applied to the subharmonic
response near the bifurcation to the chaos (Figure 5.3). When the noise intensity is low, the
system holds the same periodic response as that of the deterministic system, which is similar
to the result of the response far from the bifurcation. However, it is noted that the noise
intensity ratio is much lower (x = 0.1%) for the response to hold the periodicity. When the
scale is expanded, the response shows fuzzier shape of Poincare maps (inside the box in
Figure 5.3b). At x = 1%, unlike the previous result in which the response still holds two
isolated groups of Poincare points showing P-2 periodicity, the system loses the periodicity,
and the Poincare points are scattered between and around the two periodic Poincare points
(Figure 5.3c). With lc = 2%, part of the Poincare points spread away from the center (Figure
5.3d), and the distribution of the points are expanded further with higher noise intensities
(Figures 5.3e and f). When the noise intensity reaches lc = 5%, the response starts to form
a pattern similar to the nearby chaotic attractor (Figure 5.3g). Finally, with x = 10%, the
response shows a vague footprint of a chaotic attractor which is similar to the counterpart
deterministic chaotic attractor right after the bifurcation (Figures 5.3h and I).
114
The periodic response close to the bifurcation point shows the transition from the
periodic response to the chaotic response as noise intensity increases, with the forcing
amplitude fixed. Therefore, it can be said that for the periodic response close to the
bifurcation point to chaos, the presence of noise can induce a transition to chaotic behavior.
For the system with noise level lc > 1%, since the subharmonic response nearby chaos
in the bifurcation cascade cannot be observable and becomes chaotic-like and random with
increasing noise intensity, there is a difference in the bifurcation sequence from periodic to
chaos in a system with noise than that in a deterministic system. To investigate this
phenomenon in detail, the bifurcation diagrams of systems without noise and with noise
(Figures 5.4a and b, respectively) are compared.
In the deterministic system, it is clearly seen that periodic doubling occurs several
times from harmonic to chaos through the sharp bifurcating paths (Figure 5.4a). The
responses keep bifurcating until they reach chaos. In the system with external noise, the
distribution of periodic attractors is broadened, and the detailed structure is truncated in
higher periodicity, which has period P > 4 (Figure 5.4b). P-8 and P-16 subharmonic
responses appearing in the deterministic system (inside the box), are no longer visually
observable with a relatively small noise level (D = 0.003). Zooming into the box (Fo = 3.6
to 3.7 with 4/, = 0.005), it is observed that the subharmonic responses become higher
periodic responses and chaotic responses start to appear in the deterministic system. This
phenomenon is clearly shown in Figure 5.5. The response attractors keep doubling their
periods until chaotic responses and the P-4, P-8 and P-16 responses are observable (Figure
5.5a). Even higher periodic responses are found to appear in the beginning of the chaos
regime. In contrast to this result of the deterministic system, it can be more clearly seen in
115
transition to chaos
, 11111
3.40
bifurcation parameter Fo
(a)
transition to chaos
1.70 7
1.60
0°
1.50
....wade
1.40 =
-
001
1.30
01°
1.20
0
01
i
.
_
_20000001111111
.
141,...
-
1.00 7
"Ili
-"' bleillikki,..$1$1
0.90 =
0.80
3.00
AO
41111::::1"11
111
11
'i.C.'
,,
3.40
3.60
llllllllll
4_00
3.80
bifurcation parameter Fo
(b)
Poincare points versus bifurcation parameter (Fo) with and without the external
Figure 5.4
noise (=0.11, a=10, (3 =1, Fo=3 to 4 with increment Af0=0.005): (a) D =O, (b) D=0.003.
116
P-4
P-8
P-16
Chaos
-0.25
;"1,;;.
....
0.37
:1
-1
:
,
!ii
!WM! .11
0.49
!;:',
:1
!
,
11,!
.,!.;
!!
iii
0.61
......
0.73
.
....
:
higher periodic resposes
0.85
3.60
3.62
:
3.64
3.66
3.68
3.70
bifurcation parameter F.
(a)
P-4
inaccessible gap
Chaos
0.25
i
0.37
!
!!!iiig,
I
:
1
1
i
,
-
.
'
111111:::!::::::::1; Iiii!!!!!H1111:111
:
111111
.
g
;
'
;
.
0.49
-
.
.
;
;
;
;
-
: .
;
­
=
!
.
I
0.61
!!!!!!!!!!!!!!!!!!Iiiikilipoli
0.73
0.85
160
3.62
3.64
3_66
3.68
3.70
bifurcation parameter F.
(b)
Detailed view of Poincare points versus bifurcation parameter (F0) with and
Figure 5.5
without the external noise (=-0.11, a= 1 0, 3 =1, Fo=3.6 to 3.7 with increment Af0=0.002: (a)
D =O, (b) D=0.003.
117
- 0.34 1
--;-o.,a
0 -0.69 7
-0.57
- 0.78
0.90
0.60
.010
1.20
1.40
1.90
1.30
040 0.30
1.00
1.20
1.40
1.60
1.80
1.40
1.60
i.80
1.30
1.40
displacement(x)
displacement(x)
(a)
(b)
-020
- 0.20
- 0.14
-0.34
0 -0.62
-0.73
-0.76
1.00
0.90
0.60
1.210
displacement(x)
1.00
1.20
displacement(x)
(d)
(c)
-0.20
- 0.34
;,
-002
- 076-1
- 0 76
090
0.80
,,,,,,,,
1.00
,,,,,,,,,,,,,,,
1.20
40
op
0.90
0.60
1.60
1.00
1.20
1.40
displacement(x)
displacement(x)
(e)
(f)
-0.20
-0.20
-0.00
-0.39
>.
U
7C; -0 62
-0.76
-0.76
-0.90
0.20
166
iaio
displacement(x)
(g)
-0.90
0.80
60
1.20
1.10
1.60
1 BO
displacement(x)
(h)
Cascade of period-doubling along with bifurcation parameter Fo with and
Figure 5.6
without the external noise ( =0.03, a=10, 13=1): D = 0 in a,c,e and g; D = 0.003 in b,d,f and
h; (a), (b) F0=3.6; (c), (d) Fo=3.65; (e), (f) F0=3.658; (g), (h) F0=3.7.
118
the detailed view, that the bifurcation path of a system response broadens and that the P-8,
P-16 and the higher periodic responses are no longer encountered in a system with external
noise (Figure 5.5b).
Figure 5.6 shows the Poincare maps for P-4, P-8, P-16 and chaotic responses of the
deterministic system, and also for the corresponding responses of the system with noise in
the region for forcing amplitude, F0 = 3.6 and 3.7. For P-4 response, the system with noise
holds the same P-4 attractors as those of the deterministic system, except the Poincare points
are slightly broadened (Figures 5.6a and b). For P-8 and P-16 responses, the system with
noise no longer shows the same periodic behavior as that of the deterministic system, but
instead, shows a chaotic attractor (Figures 5.6c to f). For responses in the chaotic response
regime, both systems show identical chaotic attractors (Figures 5.6g and h).
From the results observed above, it is found that some of the higher periodic
responses, such as P > 4, or so near the chaotic response, which can occur in a deterministic
system, cannot be observed under the presence of external noise above a certain level. A
subharmonic response near chaos eventually turns into a band similar to that of chaos. With
higher noise intensity, the response looks similar to the chaotic response of the deterministic
response with larger forcing amplitude. A question may arise, "Does the chaotic response
turns back into a periodic response as noise intensity increases?" Based on the observed
simulation data, this reverse process did not happen. The effect of noise on chaotic responses
are shown in the next section.
119
5.1.2 Noise Effect on Chaotic Attractors
The effects of noise on periodic responses shows that with an appropriate noise
intensity, the subharmonic response near a bifurcation to chaos expands into the band similar
to the chaotic responses. From the primary analysis of the piecewise-linear system, it is
found that many chaotic responses occur in the deterministic system. In this section, the
effect of external noise upon the chaotic responses are examined by observing Poincare maps
of the system with and without external noise.
The deterministic chaotic response shows the typical fractal structure (Figure 5.7a).
When a relatively lower intensity of noise (lc = 0.1%) is applied, the response shows the
Poincare map to be identical to its deterministic counterpart. It also shows the same detailed
fractal structure of the chaotic attractor (Figure 5.7b). At noise intensity around lc = 1%, the
overall shape of attractors is almost identical to the one without noise, and the system still
holds the fractal structure with a slightly fuzzier look (Figure 5.7c). As the noise intensity
increases, the system response starts to lose the detailed fractal structure. Also, the
distribution of responses on the phase plane, becomes wider and fuzzier for the higher noise
intensities (Figures 5.7d to g). The detailed fractal structure begins to break with noise
intensity at about ic = 2%, and about x = 3 to 5%, the inside fractal structure totally
disappear. However, the responses are still staying in the band similar to the deterministic
chaotic attractor (Figures 5.7e to g). With lc = 10%, the distribution of Poincare points starts
to expand out of the band of the chaotic attractor radically and look more like random motion
(Figure 5.7h). Finally, when the noise intensity reaches ic = 20%, the response appears
120
SCO
1. 1
SOO
0.1 c.
3 .0
;
3. 1.
2,...41 p
t
15
.--2;
.11,
0_,
i
]
i
ri
.11 9
..
.24'..'fiil
',.,3
..1!ill
1
-100 1
-3 DC I
V
30C
1'0-3300 ,
-300
1
i
-5..
-100
-203
000
100
200
1.00
-SX '
-1.00
displocernent(z)
-100
0.05
,.CO
200
5.35
1.35
103
3.00
-203
1.00
OM
100
CIISOOCerllerlt(S)
ICO
1.00
100 0
ice
300
.03
-.0
O.CO
1.00
200
displacement(z)
3.00
'CO
1.00
t.0 -1 00
0,00
-100
-300
-5
00
-1.00
-1.
000
0.01
2.00
3.00
-SCO
-100
(e)
1.150
2.03
00
0.05
displacement(x)
(g)
1.
displacement(x)
(d)
-1W
0.00
displacement(x)
(c)
5.00
-5.S1
-1:00
(b)
(a)
-103
-100
diSOCCement(x)
(f)
2.110
00
0.00
diSpiCCGC210,1[(31)
(h)
(i)
Effect of noise intensity to chaotic responses in Poincare maps (&0.03, a=10,
Figure 5.7
13=1, F0=4.5): (a) D=0, (b) D=0.0045 (x=0.1%), (c) D=0.045 (K=1%), (d) D=0.09 (c=2%),
(e) D=0.135 (c=3%), (f) D=0.18 (c=4%), (g) D=0.225 (c=5%), (h) D=0.45 (K=10%), (h)
D=0.9 (K=20%).
121
totally random, filling up the whole phase plane, and loses the chaocity completely (Figure
5.7i).
Comparisons are made between the results of noise effects on chaotic responses and
those on periodic responses. The periodicity is destroyed at the noise level lc > 2% in both
subharmonic responses: one near the bifurcation and the other far from the bifurcation point,
while the chaotic response still shows its character with higher noise intensity ic = 5%. From
this comparison, it is concluded that the chaotic response has a stronger attracting strength,
and its response is relative more stable than the nearby periodic responses in the presence of
external noise.
5.1.3 Mean Poincare Maps
From above section, it is found that the effects of noise on the harmonically driven
attractors is to eventually eliminate the fractal structure of the chaotic attractors. In the
presence of noise with high intensity, it is difficult to verify the potential existence of chaotic
responses. For this purpose, the mean Poincare maps are generated to determine if the noise
effect can be averaged out to reveal the underlying attractor.
A preliminary examination of the behavior is conducted by comparing the regular
Poincare maps of both deterministic and perturbed chaotic responses. The mean Poincare
maps is generated with various sample sizes (number of realizations) to determine the
optimal number of realizations (Figure 5.8). With high noise intensity (x = 5%), the regular
Poincare map of a single response (Figure 5.8b) expands (appears fuzzier) and loses the
detailed fractal structure, compared to the deterministic case (Figure 5.8a). The mean
122
4.00
4.00
2.00
2.00
c
.;;.
,;
' 000
i";;
U
0
.. 1:;4:s
y
715
-2.00
0.00
.
- 2.00
0.50
- 4.00
0.00
2.00
1.50
1.00
displocement(x)
0.50
1.00
2.00
I .50
2.50
diSplaCeMerlt(X)
(a)
(a)
4.00
4.00
"*; 1:::5:,.
2.00
.....>_,
o
Its/
is :." i".
_ Wgc:::
aco. 4.
iriit,: :'..., i
...e.r:
A: .3.. - . - .
"---k
..; r
. ,..-..... P..0.,
0
.
1*
T.)
>
0.00
..­:.:.
.
,f:Af
.
>s o.00
(..)
.
:ri;;
2...4r
-2.00
-4.00
2.00
!::.1P i
: 14.'
0.50
11*
2.00
1.00
- 4.00
0.00
2.50
0.50
1.00
2.00
2.50
2.00
2.50
displocement(x)
diSplOCernerlt(X)
(c)
(d)
4.00
ZZ,
It54..4.
2.00
Z.: .4
V ':. ,'
2.00
k.
..s.:i.7
0.00
4
.;
*,`),
U
0
l
.
.1 I :v
P:r:
):
.
qd'
0.50
100
1.50
displocement(x)
(e)
Figure 5.8
Tv'
1.
Ael-1.
-2.00
0.00
0
0
;:.
'.....*::::..4,*
-4.00
>
2' 000
. r r.*.i...
4)
...--.
-2.00
'?
2.00
2.50
-4.00
0.00
0.0
1.00
1.50
displocement(x)
(0
Comparison between regular Poincare maps and the mean Poincare maps with
different sample sizes (N = No. of realizations) (=.0.03, a=10, 3=1, F0=4.5, D=0.225,
ic=5%): (a)(b) regular Poincare maps; (a) deterministic chaotic response; (b) perturbed
chaotic response; (c-f) mean Poincare maps; (c) N=10, (d) N=50, (e) N=100, (f) N=600.
123
600
610
im
am
-0.60
0.10
110
1.20
601
3.00
50
-0.60
0 30
110
displacement(x)
disolocernent(z)
(a-1)
S 10
-4.00
103
SO
-060
0.30
110
1,0
2.uo
1.20
2.10
teo
2.10
310
displacement(z)
(a-2)
(a-3)
600
6.07
0
-410
-150
-0.60
0.30
110
3.10
3.00
displocement(x)
-600
-150
-060
0.30
1.10
2.10
310
-600
-150
-0.60
(b-2)
(b-1)
0.70
displocernent(x)
diSPIOCerflent(X)
(b-3)
210
100
0
0.2
-0.60
0.30
110
2.10
100
-601
SO
-0.60
0.10
110
displocernen;(x)
diSPIOCerrIerit(%)
110
3.05
600
, SO
0.30
110
displocernert(x)
(a-5)
(a-4)
-060
(a-6)
600
600
\
300
110
!I e
;.°-zco
."!,60
-0.60
030
110
displacement(x)
(b-4)
S.iO
3.00
-600
-150
-0.60
0.10
110
disalocernent(x)
(b-5)
2 10
3.00
am
w
-0'd,spi:cern;flot(x) 210
100
(b-6)
Comparison between regular Poincare maps and mean Poincare maps with
Figure 5.9
various noise intensities (--0.03, a=10, (3 =1, Fo=4.5): regular Poincare maps (a)'s; mean
Poincare maps (b)'s; (a-1), (b-1) K=1%; (a-2), (b-2) K=5%; (a-3), (b-3) K=7%; (a-4), (b-4)
K=8%; (a-5), (b-5) K=10%; (a-6), (b-6) K=20%.
124
Poincare map, generated with a relatively small sample size (N = 10), shrinks back showing
a little sharper image in the phase plane, but the precise structure of chaos is still missing
(Figure 5.8c). As the sample size increases (N= 50 and 100), the mean Poincare maps starts
to show the fractal structure of chaos again (Figures 5.8d and e). With a large sample size
(N = 600), it is observed that the mean Poincare map recaptures the fractal structure of
chaotic response, even under high intensity noise level (Figure 5.8d). Hence, with a proper
sample size (N = 600), the mean Poincare map can reveal the chaotic responses under the
presence of random noise. Note that the sharp boundary of chaotic response observed in the
deterministic Poincare map is smoothed out in mean Poincare maps.
A comparison between the regular Poincare maps and mean Poincare maps of a
system with different noise intensities is made to determine the capability of the mean
Poincare map to capture the chaotic attractors under high noise intensity (Figure 5.9). All
mean Poincare maps are made with the sample size of N = 600. With a low noise level lc =
1%, regular and mean Poincare maps stay in the same band, except that the mean Poincare
map displays a sharper image (Figures 5.9a-1 and b-1). While the regular Poincare map
starts to lose all the detailed fractal structure as noise intensity increases, the mean Poincare
map shows the precise image of the chaotic attractor (Figures 5.9a-2 and b-2). When the
regular Poincare map begins to expand out of the boundary of a chaotic response band, the
mean Poincare map shrinks slightly, but still shows most of the detailed structure (Figures
5.9a-3 and b-3). At higher noise intensities, regular Poincare maps show virtually random
responses distributed around the chaotic regime (Figures 5.9a-4 and 5). In contrast, the mean
Poincare map continues to exhibit the detailed structure of the chaotic attractor as noise
intensity increases, and also keeps converging toward the mean value of the response, while
125
losing the details of the chaotic attractors (Figures 5.9b-4 and 5). Finally, with noise
intensity ic = 20%, the regular Poincare map shows the total random response and the mean
Poincare map shows that the response converges into the mean value as expected. Both
regular and mean Poincare maps no longer show any trace of chaotic responses (Figures a-6
and b-6).
From the results, it is found that in the presence of high intensity noise, the mean
Poincare maps can expose the potential chaotic responses hidden under the noise which the
regular Poincare map cannot detect. It is suggested that the mean Poincare map can be
employed to uncover these potential chaotic responses in noisy conditions.
5.1.4 Mean Time History
Before analysis of the Poincare sampled processes is considered, ensembles of time
histories are examined to observe the stochasticity of the actual response process. Mean time
history is the ensemble average of the time histories of the randomly perturbed system. The
mean time history can be described as:
x(r) = <x(t)> =
IN
N
i =i
x (t )
for i =1,2, ..., M
(5.1)
'
where M is the index of sampling time and N is the total number of realizations.
N-number of randomly perturbed chaotic responses are simulated to generate the
mean time histories. Some of the results with different numbers of sample functions are
presented to demonstrate the property of mean time history (Figure 5.10). Comparing the
126
4.00
4.00
2.00
2.00
>, 0.00
+>:, o oo
0
0
0
Cr)
a)
-2.00
- 2.00
-4.00
- 3 00
-1.00
1.00
4.00
-3 00
3.00
displacement(x)
(a)
4.00
2.00
2.00
0.00
0.00
0
-2.00
-2.00
-1.00
1.00
displacement(x)
(c)
3.00
C
0
300
1.00
(b)
4.00 ­
- 4.00
-1.00
displacement(x)
3.00
- 4.00
.....
-3 00
-1.00
1.60
3.00
displacement(x)
(d)
Figure 5.10 Phase trajectories of one sample and ensemble averaged time histories (mean
time histories) of the piecewise linear system under the randomly perturbed harminc excitation
with different sample sizes = 0.03, a = 10, P = 1, F0 = 4.5, D = 0.045): (a) one sample, (b)
N (No. of realization) = 10, (c) N = 100, (d) N = 1000.
127
results of the one sample function (Figure 5.10a) with the small number of samples (N = 10),
the mean time history still shows the complex form (Figure 5.10b). When the number of
sample functions increases (N= 100, Figure 5.10c), the mean time history becomes close to
a periodic motion. Finally, with sufficient number of samples (say N = 1000), the mean time
history shows that the ensemble average of the actual responses shows the harmonic motion
(Figure 5.10d).
When the actual processes of chaotic responses are considered, the ensemble average
of the system responses is found to be harmonic with the periodic attractor located in the
middle of the phase trajectory of the chaotic response. Hence, the actual chaotic response
is non-stationary, since the mean value is dependent upon the sampling time.
5.2 Stochastic Processes
Statistical properties of a random process are evaluated based on an ensemble and
they may or may not be the same as the one time progress of the system (Ochi 1990). In this
section, stochastic properties of the processes of the chaotic system responses are evaluated,
based on the ensembles obtained from direct numerical integrations. As mentioned earlier,
Poincare sampled processes are considered. Comparison of one sample and ensembles
collected at the different Poincare sections is carried out to observe the stochastic
characteristics of the piecewise-linear system.
First order PDFsfo(t), ensemble average E[x(t)] and the auto-covariances: Cxx[x(t),
x(t+ r)] and C[x(t), mg] are generated to examine stationarity and ergodicity.
128
5.2.1 Regular Poincare Maps and Ensembles
Poincare maps are typically assembled from a one time progress, hence they do not
yield information of the entire process in general. Since the statistical properties of a
stochastic process should be taken from the ensemble, an ensemble of the chaotic system
responses are collected at a forcing period.
The Poincare map of a single sample (Figure 5.11a) and the ensembles (Figures
5.11b,c and d) collected at different times are compared (Figure 5.11). It is observed that all
the ensembles are identically distributed in the same shape as that of the counterpart chaotic
attractor. Note that each ensemble is collected at different sampling times and they are also
identical to each other (Figures 5.11 b,c and d).
Results obtained from comparing the realization and ensembles indicate the
possibility of stationarity and ergodicity in the chaotic responses of the system under the
randomly perturbed harmonic excitations.
5.2.2 First Order Probability Density Functions
From previous results, potential existence of the stationary and ergodic characteristics
in the system responses is observed. The first order PDFs of the ensembles of the chaotic
system responses is generated and examined to determine the presence of the stationarity of
ergodicity of the processes.
The PDFs are produced from the ensembles with 600
realizations.
Figure 5.12 shows the first order PDFs of a single realization and ensembles collected
at different times. Once again, note that the processes are Poincare sample points. When the
129
4.00
4.00
't"
4:
.3
. I
.e.,:
2.00
2.00
t­
3,
t;
st
0.00
r .;
U
O
';.
4:.t
..13.3
..*., .
34.1'
,..
0.00
U
O
To
;
az
;
'TV
-2.00
-2.00
' s,.
"1.1.4.... )
1
7.1­
A.x.0
-4.00
0.00
-4.00
0 50
1.00
2.00
1.50
2.50
0.00
0.50
1.00
4.00
4.00
7%.
.04..
A
.
1%.
.l
:A I 'I.
e.;
2.00
U
2.50
(b)
(a)
0.00
2.00
1.50
displacement(x)
displacement(x)
.41.
4... ;.:
2.00
So.:. 3 I.
.t.
'1,5
T
3.
!4%
'.(";;11.
0
V
4
'
;::
3
..1.
::
i
%C./.
>, 0 00
U
?:;'%e;
.1'
3.
7
,
346:3
*
To
..3.;
-2.00
-2.00
,eto
e
-4.00
0.00
-4.00
0 50
1.00
displacement(x)
(c)
Figure 5.11
1.50
2.00
2.50
0.00
0.50
1.00
1.50
2.00
2.50
displacement(x)
(d)
Poincare maps of one realization and ensembles collected at different forcing
cycles (=0.03, a=10, (3=1, F0=4.5, D=0.045): (a) one realization; (b-d) ensembles; (b)
t=200xTf, (c) t=400xTf, (d) t=600xTf (Tf=harmonic forcing period).
130
1.50 -
1 50
1.00
1.00
0
O
0
_o
0
Lo so
Qo.so
0.00
2.00
1.00
,,,
,
,
3.00
0.00
0.00
displacement(x)
,, 1.00
2.00
displacement(x)
(a)
3.00
(b)
1.50
1.50
1.00
f
0.00
0.00
2.00
1.00
displacement(x)
(c)
3.00
0.00
0.00
2.00
1.00
displacement(x)
3.00
(d)
1' order probability density functions of a single realization and ensembles of
Figure 5.12
the random process of the system responses collected at different times ( =0.03, a= 1 0, 3 =1,
D=0.045): (a) one realization; (b-d) ensembles; (b) t=300xTe, (c) t=350xTe, (d) t= 600XTe.
131
PDF of one sample is compared to the those of the ensembles, it can be seen that they are
virtually identical (Figure 5.12a-d). When the PDFs of the ensembles are compared to each
other, they are found to be practically identical. By the definition of stationary and ergodic
processes, it can be said that at least the first order PDF, that is the mean value of the process
is ergodic (hence stationary).
As mentioned earlier, it is practically impossible to verify a process as a stationary
or a ergodic processes in the strict sense. In the next section, it will be shown that a chaotic
response of the stochastic piecewise-linear system is weakly stationary and the sample mean
is ergodic.
5.2.3 Analysis of Weakly Stationary Processes
A stochastic process is said to be weakly stationary if its mean is constant and
independent of time, and if the auto-covariance function is independent of time and depends
on time shift T. To classify the stochastic process of the system responses of the piecewise­
linear system, the ensemble average E[x(t)] and auto-covariance Cov[x(t), x(t+ r)] are
investigated.
Theoretically, a random process consists of an infinite number of realizations, each
of which can be considered as resulting from a separate experiment (or simulation) (Newland
1984). Since obtaining an infinite number of sample functions is impossible, a sufficiently
large sample size (N = number of realizations) needed to measure the ensemble mean and
auto-covariance has to be determined to evaluate the mean and auto-covariance of the
stochastic processes.
132
Ensemble means and auto-covariances of different sample sizes are generated to
determine both the appropriate sample size and the tendency of these functions as the sample
size increases. In Figure 5.13, three sample sizes of N = 60, N = 600, and N = 6000 are
attempted. For N = 60, the ensemble average and auto-covariance function fluctuate too
much to determine whether the functions are independent of time (Figures 5.13a-1 and a-2).
The ensemble average and auto-covariance become stable with N= 600 (Figures 5.13b-1 and
b-2). Finally, for N = 6000, the mean and auto-covariance become stabilized and remain
almost constant (Figures 5.13c-1 and c-2). The trends indicate that the results tend to be
more stable as the sample size increases. In this study, the sample size N = 6000 is
considered sufficiently large to estimate both mean and auto-covariance.
The above results show that with a suitable sample size, the mean value and autocovariance function are independent of time. This trend of independence become clearer as
the sample size increases. The auto-covariance function with a sample size of N = 6000 is
generated with respect to the time shift T (Figure 5.14a) to check the dependency of the
function on time shift. The auto-covariance function C[x(t), x(t+ r)] varies with the time
shift, indicating the dependency of the auto-covariance upon the time shift.
From Figures 5.13c and 5.14a, it is observed that the ensemble average is constant
and that the auto-covariance function depends only on the time shift T. The results satisfy
the condition for the stochastic process to be weakly stationary. Therefore, the stochastic
process of the chaotic system response of piecewise-linear system appears to be weakly
stationary.
133
3.00
1.00
0.50
CP
0
a)
X200
O
C
0
0
0
000
a)
O
0
E
O
cl) 1.00
-0.50
O.>
0.00
0.00
50.00
-1.00
..
100.00 150.00 200.00 250.00 300.00
0.00
time index
50.00
(a-1)
100.00
150.00 200.00 250.00 300.00
time index
(a-2)
3.00
1.00
0.50
0'
0
O
0
C
0
2.00
0.>
0
0.00
t;)
0.>
0
0
0
E
1.00
C
-0.50
a)
000
0.00
50.00
100.00
-1.00
150.00 200.00 250.00 300.00
0.00
time index
50.00
(b-1)
100.00 150.00 200.00 250.00 300.00
time index
(b-2)
3 00
1.00
a)
0.50
0
0
0
C
0
E
O
0
2 00
>
0.00
O
4) 1 00
0 -0.50
C
0.00
0.00
50.00
100.00
150.00 200.00 250.00 300.00
time index
(c-1)
-1.00
0.00
50.00
100.00 150.00 200.00 250.00 300.00
time index
(c-2)
Convergence of ensemble average E[x(t)] and auto-covariance C,,,[x(t),
x(t+c)] with increasing the sample size (number of realizations, N): (a-1), (b-1), (c-1)
ensemble averages; (a-2), (b-2), (c-2) Autocovariance; (a) N=60, (b) N=600, (c) N=6000.
Figure 5.13
134
0.30
0.20
c\I 0.10
xx 0.00
U
0.10
0.20
0.00
20.00
1
40.00
1
60.100
80.100
100.00
time shift
(a)
0.30
0.20
0.10
/Th
(i5.
0.00
0.10
0.20
0.30,
0.00
20.00
40.00
,,
60.00
80.00
100.00
1
sample size(t)
(b)
Figure 5.14 Weak stationarity and ergodicity of the stochastic process of chaotic
responses: (a) auto-covariance Cxx(t, t+t); (b) Covariance between ell sample mean Me and
tth observation X(t), C(t)=Cov[X(t), Me].
135
5.2.4 Analysis of Ergodic Processes
A physical system may possess the property that the average computed from a sample
of process, can be identified with the corresponding ensemble average (Parzen, 1962). It has
already been found that the first order probability density functions of a sample mean and
an ensemble are identical, showing ergodicity. The convergence of covariance between the
tth sample mean and the tth observation X(t) is evaluated to verify if the sample mean of the
chaotic responses is ergodic.
As mentioned earlier, the sequence of sample means are ergodic, if and only if as the
time lag t increases, the covariance Cov[X(t), M,] converges to the zero.
The covariance function between sample mean M, and x(t) is generated (Figure
5.14b). From the result, it is clearly seen that the covariance function Cov[X(t), 4]
converges to the zero as t increases.
From the observation of ensemble average E[x(t)], auto-covariance C[x(t), x(t+ -r)]
and co-variance Cov[x(t),M,], it is found that the sample mean m, of the stochastic process
of a chaotic system response of the piecewise-linear system is ergodic.
5.3 Analysis of System Behavior in Probability Domain
The probabilistic properties and stability of anharmonic system responses were
examined by observing individual realizations and the ensembles of the corresponding
stochastic systems based on time domain simulations. The solutions of corresponding FPE
of the stochastic piecewise- linear systems have been obtained by the path-integral procedure.
As described previously, the path-integral solution gives the evolution of joint probability
136
density functions f(xl, x2; t) of a response for a given stochastic system. In this section, the
characteristics of the system responses are investigated in the probability domain by
inspecting the joint PDF obtained from the semi-analytical, path-integral procedure. Initial
conditions of the FPE are assumed to be deterministic, represented by a delta function:
f0(X;01,=0 = o(X -X0)
where X0 = (0,0)
which is defined by a point with the area virtually zero in the phase plane, so that the
probability only has a value at X= (0,0). These initial conditions are chosen for evaluating
all the joint probability density functions. From this point on, unless otherwise stated, PDF
stands for a joint probability density function f(xl, x2; t).
An example of the PDF of an ensemble of chaotic responses is demonstrated and
compared to the deterministic chaotic response in the Poincare section in Figure 5.15. The
structure of chaotic response in a deterministic system (Figure 5.15a) is revealed by the
steady-state PDF of the same system with a low noise intensity (Figure 5.15b). This assures
that analyzing the PDFs can give the proper information about the system behaviors found
in the deterministic systems.
First, those periodic and chaotic responses studied in the previous sections are
examined with special attention given to the PDFs. Secondly, the coexisting responses are
examined and the stronger attractor is identified. Results from the path-integral solution and
direct numerical integration are examined and compared.
137
5.0
ti
CN
X
(7./
":*
-4.0
-0.5
01 .2
2''
01' 0.9
3.0
.3
xl
(a)
-0.5
0.7
5.0
1.8
IIIIi111111
3.0
III
5.0
2.0
2.0
1.0
-1.0
4.0
'
-0.5
111111
I
I 11111ILIIIILI
0.7
1.8
"1 -4.0
3.0
x1
(b)
Figure 5.15
Comparison of deterministic chaotic response and joint probability density
function on Poincare section: (a) Poincare map; (b) steady state joint probability density
function of the ensemble of the Poincare sampled process in the phase plane.
138
5.3.1 Periodic Responses
In this section, the ensembles of system responses are investigated by examining the
PDFs for each type of periodic responses: one is the response clear from the chaotic attractor
and the other is the response close to the chaotic attractor in the bifurcation cascade.
First, P-2 response away from the bifurcation point is examined. As described
before, the initial conditions are given by a delta function at X(0,0). The evolution of PDF
is presented in Figure 5.16. In Figure 5.16a, the locations of initial conditions and P-2
periodic attractors are presented. In the beginning, the PDF shows the concentration of the
responses on the smaller portion, but it can be seen that the ensemble of responses are
already moving forward to the periodic attractors even at the 1st and 2'd cycles, although it
does not quite reach the attractors (Figures 5.16b and c). At the 9th and 10th cycles, the PDF
reveals a P-2 subharmonic motion by shifting between two periodic attractors at every cycle
(Figures 5.16d and e). Later, spreading between the two attractors emerges from the
boundary of the concentrated probability distribution (Figures 5.16f and g). This can be
interpreted as a part of the responses escape from the regime of the periodic attractors,
indicating the existence of a possible coexisting response. Finally, the PDF reaches its
steady-state, repeating the same distribution every two cycle (Figures 5.16h and I). It can
be seen that the P-1 harmonic attractor appears in the middle of the subharmonic P-2
attractors. The steady-state PDF represents that part of the responses stay in the same P-2
periodic attractor, while the other part of the responses have transitioned to the P-1 harmonic
attractor.
139
60
1.0
initial condition
95
6D
95
1.3
-1.0
2.5
8.0
9.5,
A
5.0
4.0
40
40
00
0.0
0
0.0
-40
-4.0
i3r8
(2)
4.0
4.0
00
0.0
-4,0
25
1310
.=;14
4.3
-4.0
08.0
-80
2
-4.0
1 4.0
1.
periodic attractors
6.3
1.0
1
.1
1.0
5.5
215
.1
(a)
=,`1
13%.0
1.0
,
,
95
8.3
,
4.0
4.0
4.0
0.0
0.0
x 0.0
D.0
-4.3
4.0
'
6.3
x1
9.5
08.0
01.
2.5
(d)
25
6D
6.0
x1
9.5
;1,,
1
.0
2.5
1.3.6.0
-1.0
25
60
10.08.0
80
95
-4.0
1.0
2.5
D.0
-4.0
-4.0
9.5
(h)
2.5
0
0.0
x
3.
6.D
9.5
1
68.0
(f)
0.0
2.5
9
.1
4.0
-8'21.0
5
D.0
-4.0
4.0
08.0
68.0
1
0.0
-4.3
4.0
4.0
9.5
.0
(e)
95
6.D
(c)
,,,,
,,,
6.0
2.5
,
1.0
2.5
x1
4.0
-8.0
-1.0
1
(b)
,, , ,,,,,, ,
- 11.0
5.D
08.3
9.5
1308.0
34c
6.0
9.5
13.i
40
.0
0.0
0.0
-4.0
-8,0
-4.0
1.0
'
,
2.5
11111
6.3
9.5
1305.0
1
(i)
Figure 5.16 Evolution of the joint probability density function f(xl, x2; t) of a P-2 periodic
response away from the bifurcation point in 2-D contour maps (&0.03, cv---10, f3=2, F0=6.5,
q=0.0003): (a) initial condition (*) and periodic attractors (0); (b) 1St cycle, (c) 2'd cycle,
(d) 9th cycle, (e) 10th cycle, (1) 11th cycle, (g) 12th cycle, (h) 49th cycle, (i) 50th cycle.
140
60
4.3
4.3
4.9
4.8
0.5
x 0.5
0.5
1
'7,
0.5
-8.0 r""" ------ 8.0
IT
2.5
6.0
1308.0
9.5
2.5
X1
(a)
2.5
9.0
6.0
9.5
13.191.0
0.5
0.5
1-111111 11111111111111.
2.5
60
9.5
8.0
2.5
9.0
- 4.3
-1.0
'..;11,
9.5
13.19,
111.1'
0.5
- D.5
_3.0
13 0
.11_j11.1111111.11111111.
2.5
6.0
xl
8.0
9.5
13 0
9.5
13.0
(d)
9.5
13.0
9.0
9.0
4.3
4.8
4.3
- 4.8
0.5
- 0.5
x 0.5
0.5
9.0
x
6.0
- 4.8
(c)
6.0
130
4.3
xi
2.5
9.5
(b)
4.3
,:;`4,
6.0
xl
2.5
6.0
D
-3
-8.0
"
111111.111111.111
2.5
60
xl
(e)
9.5
13 0
8.0
.01.0
2.5
1./111
6
xl
1303.0
(f)
Figure 5.17
Evolution of the joint probability density function f(xi, x2; t) of a highly
perturbed P-2 periodic response away from the bifurcation point in 2-D contour maps
( =0.03, a=10, 13=2, F0=6.5, q=0.003): (a) 13th cycle, (b) 14th cycle, (c) 19th cycle, (d) 20th
cycle, (e) 49th cycle, (0 50th cycle.
141
Higher noise intensity is applied to the same system to observe the noise effect in the
PDF (Figure 5.17). After the stage of fluctuation of PDF from the initial conditions, the PDF
is stabilized and shows the P-2 periodic motion in the phase plane (Figures 5.17a and b).
The responses are distributed widely, but most responses are concentrated on the two
subharmonic attractors. At the 19th and 20" cycles, the peak point of probability distribution
moves toward the harmonic attractor. Once again spreading emerge from the boundary of
the regime of periodic attractor (Figures 5.17c and d). The steady-state PDF shows the P-2
periodic motion, however, it can be seen that most responses converge to P-1 harmonic
motion while some are still attracted to the P-2 motion, and yet others are attracted to the
other direction showing the presence of another coexisting attractor (Figures 5.17e and f).
It is found from the analysis of single responses that the P-2 subharmonic response
survives until the noise level increases beyond D = 0.13. With a higher noise level (D =
0.195), P-2 response is destroyed and P-1 response appears (Figure 5.2). The PDFs show
that the P-2 subharmonic response survives under relatively small level of noise (q = 0.0003)
with a P-1 harmonic response. With higher noise intensity (q = 0.003), P-2 harmonic
response virtually disappear, leaving the dominant harmonic response alone.
The steady-state PDFs are computed with different noise intensities to observe the
noise effect more in detail in 3-D contour maps. With a low noise intensity (q = 0.00003),
the PDF shows that most responses are P-2 responses with a small portion of the responses
becoming harmonic (Figures 5.18a and b). With a higher noise intensity (q = 0.0003), the
occurrence of P-2 and P-1 responses are almost equal to each other (Figures 5.18c and d).
With even higher noise intensity (q = 0.003), P-2 responses are destroyed and all the
142
9470...0...
0:71.7.4(
0 .0.0.06040 .Z...00. '0.0.1.04 .0.2.t. e.......
.0.0.0.0.000.0..
0 0 0 -0 00.- ­
.1.0...1.:01:: ,ZelZSZVZ:friat.S.V.ZZSZ:Z.V2
. ...
0. 0.
... 0
0 ON, 0.0 00.00.00.010.0.0.0.*
.. 0 .060 .0 .
0.0
0.0
.. .
.
.1 I I 0,,, ...,
.11411411411%.0.0.0.0.0
.11140.0.0.1140 0.
00000
(a)
(b)
0 itt:00.0
0.SZSZ.0.0
etifffitiffit.3.3:0470.k.
4.4.4.41.4.46a
.
4..1%a a a..a..a....a
,..
0 0 0.0. ..
"ON&0.
0.....0.0.0.0.110.
.000.0.0.0.0.0
05400,00-01.
0 :;$1:4$1. i:4$4 .1
00...0.40,00..$030:.0:0:0:0:020°'
..,
4%0.0 0 0 0 0.
01:131..."110...V1140
11%... 0 0. 0 0 0. 1.
0.000.0.0.0.0i 0.0.0.0.0.0.0.
0.
Co.
04".0:40. X: !.. 7. 0..7$4.0:70::::
0 0
.0.0.00.0. 0.0.0
11
0.0.040.0.0
0 0.
(c)
(d)
rig. 0
.04413
0 0 0.000.0.
.0 .00:0:0.
0 .4
1 I b.00.000
11.
0 0 0 0.
4%4
0
0 0 .0 .0.00 ....00 00 0 0 .00. 0.0
0 .0.0
......
.,..t....
044.
......z.z.z.z.z.z.z...
.......t..."."....,"....t.e....".e.ter.teeg.t..
....P...
o4.0.0.040.0.0.0.0.0.011.4041.4,0 0 0
,..0.0.,04.0 0 0. 0 0 .60.4. 01,-..1....0 0 0 0.
0 0 0 0 00000r00.4*
0- 16.0.410.,
0.0.0.0.0,,0
go 0 41. 0, -.4. 410.,-.0...0.0-0..-0-0.-0-0.
..4tt0.0000-0­
:....0 4 1 liZ 41 I 000 It. . 1.0 .1 . C. t. .4
.0 I .4 ... .0 00 0. 0 .0 0 .0 .0
0.0.11..0 0.0..010.
. 0:01.:::0:0 .
0 .041 1
(e)
.
A .. ..4 . b.. .4.. .. AO ..4 ..0... 07..
....,
NI,... ... A. A.
:.:::::::Z::::ZZZ
V ' ' ' ... . . . . 1 N ° .4 " '1 " ."
..i1VFETWSPZICZ.Z.
....,
'Z. 1S.f.ee.f.
.. 00.e.c.......48t$01:05!..­
0.0.04tIlft.:~0.
0.....0t. .0.
.0.0
0 00.
,
(0
Figure 5.18
Steady state probability density functions f(xl,x2; t) of P-2 periodic responses
away from the bifurcation point in 3-D contour maps with different noise intensities
a=10, P=2, F0=6.5): (a), (b) q=0.00003; (c), (d) q=0.0003; (e),(0 q=0.003; (a),(c),(e) 49th
cycle; (b),(d),(f) 50th cycle.
143
responses are randomly distributed in the phase plane while a majority of responses are still
showing P-1 harmonic responses (Figures 5.18e and 0.
Next, the P-2 response near bifurcation point is examined in probability domain.
From the observation of individual single realizations, it is found that the subharmonic
motion quickly vanishes and jumps into a chaotic response with a low noise intensity (Figure
5.3). This behavior of the P-2 response close to the bifurcation is investigated from the
evolution of the probability distribution of the ensembles (Figure 5.19). Figure 5.19a shows
the initial conditions and deterministic subharmonic attractors in the phase plane. The PDF
of disturbed periodic responses is shifted and starts to spread away from the initial conditions
at the 1' and 2' cycles (Figures 5.19b and c). At the r to 5th cycles, the PDFs show that the
major portion of responses are concentrated around the two periodic attractors and that the
other portion of the responses is stretched away from them, forming the strange attractor
(Figures 5.3 d and e). At the 7th cycle, the PDF almost reaches its steady-state and the
distribution of the ensemble appears more like chaotic motion (Figure 5.190. The steadystate PDF shows the complete chaotic attractor in probability domain (Figure 5.19g). At 49th
and 50th cycles, the steady-state PDFs are showing that the responses are converted from P-2
periodic motion into chaotic motion and that there is no indication of periodic motion which
was found in the P-2 response away from the bifurcation (Figures 5.19h and I).
From observations of the evolutions of PDFs and steady-state PDFs of the ensemble
of the system responses, it is found that the subharmonic responses away from bifurcation
to chaos are more stable than the one near bifurcation. They remain the same periodicity
with a relatively low noise intensity, while showing the coexisting P-1 attractor. With a
higher noise intensity, it is found that the same system loses periodicity completely and
144
-10
-D.0
4.0
1.0
2.0
initial condition
2.3
-01
30,0
2.3
0.5
0.5
23 {­
0
x 0.5
rr
-1.3
-1.3
-1.31­
-1.3
-1.3
-1.3
periodic attractors
,
0
4.01 0
7.1,c'
-0.0
1.011
3.3 r,,,1.
-1.0
-0.0
1.0
X1
(a)
(b)
,,,, " "
-0.0
3.1
2.0
X1
1.0
20
.0-1D,
3.0
2.0
-10
114.D
2.3
23
2.3
2.3
0.5
0.5
x 0.5
0.5
-1.3
-3.3
3
11
1
1.0
1.0
3.0
-0.0
33
1.0
2.0
-1.3
0
ti
-0.0
1.0
3.04.0
2.3
2.1
0.5
D.5
-1.3
11,1
- 3.01.011110.01,
3.0
2.0
x1
10
(c)
,,,, ,,
70,1
3.0
3.0
-1.3
11.1111
3.0
-10
30
x1
(d)
(e)
(f)
(g)
(h)
(i)
Figure 5.19 Evolution of the joint probability density function f(x1,x23) of a perturbed P-2
periodic response near the bifurcation point in 2-D contour maps G=0.03, a= 1 0, 13 =1, F0=3,
q=0.0002): (a) initial condition (*) and periodic attractors (2); (b)
cycle, (c) 2nd cycle,
(d) 3rd cycle, (e) 5th cycle, (f) 7th cycle, (g) 30th cycle, (h) 49th cycle, (i) 50th cycle.
145
becomes random. In contrast, the subharmonic response near the bifurcation immediately
loses its periodicity under the presence of a low level noise, and the ensemble lands into the
region of the nearby chaotic attractor without any indication of the presence of periodicity
possessed by its deterministic counterpart.
These results suggest that the noise effect and characteristics of the system behavior
can be more precisely explored by the evolution of PDFs obtained via path-integral solution
rather than by examining only the single realizations.
5.3.2 Chaotic Responses
It was previously found that the chaotic response is more stable than the subharmonic
responses under external noise even though it loses its details of fractal structure as noise
intensity increases (see Figure 5.7). It was also found that the single response and the
ensemble are the same in the Poincare sections, and that the Poincare process of chaotic
responses is weakly stationary and the sample mean is ergodic. As mentioned before, the
PDFs can give more precise information about the system behavior under the presence of
noise. The PDFs of perturbed chaotic responses are generated to see the stability and the
characteristics of chaotic responses found in the previous deterministic system.
The evolution of PDF is examined first to determine the evolutionary behavior the
ensemble (Figure 5.20). The system has the same parameters and same harmonic excitation
as that of the counterpart deterministic system except the low noise intensity. Unlike the
periodic responses, the ensembles of chaotic response quickly forms the same shape as the
chaotic attractor. At the 2' cycle, the ensemble is expanded and starts filling up a portion
146
5.0
0.4
0.5
1.3
3.0
2.1
15.0
2.3
2.3
0.5
0.5
- 0.5
5.0
0.4
1.3
3.0
5.0
2.1
2.3
2.8
x 0.5
- 0.5
IrL
-1.3
13
xl
3.0
2.1
4.0
_4.0
1L111111/1111111111111,_J
0.4
(a)
5.0
0.4
0.5
I
4.0
2.1
3.0
2.1
3.0
(b)
1.3
I
1.3
x1
3.0
2.1
rr 5.0
1
- 0.5
5.0
0.4
13
11/1-11111_,
5.0
2.3
2.3
2.8
2.8
0.5
- 0.5
0.5
0.5
1.8
-4.0
0.5
" '0.4"
" ' " " " " 3.0
13
2.1
4.0
4.0
11111111111111111111111
0.4
xl
xl
(c)
5.0
0.4
11111
1.3
1.3
2.1
3.
2.1
3.0
4.0
(d)
111
3.0
2.1
11
11
I
2.3
5.0
5.0
2.8
2.8
0.5
0.4
1.3
5.0
2.3
x 0.5
0.5
0.D
I/1111111111.11111111
- 0.5
0.4
1.3
xl
(e)
2.1
3.
4.0
-4.0- 0.511(11111111111La.1111111
0.4
1.3
xl
2.1
4.0
3.0
(0
Figure 5.20 Evolution of the joint probability density function f(xl, x2; t) of a perturbed
chaotic response in 2-D contour maps (E=0.03, a=10, (3 =l, F0=4.5, q=0.0002): (a) initial
condition; (b) 2nd cycle, (c) 3° cycle, (d) 4th cycle, (e) 6th cycle, (0 50th cycle.
147
52
0.1
Frl
2.1
1111
32
5.2
-1 0
5.2
0.1
2.1
3.2
;
5.2
H
H
2.6
0.1
2.6
0.1
-2.5
-5.0
-1.0
2.6
11111
0.1
1t11111
1.1
xl
2:1
3.2
0.1
-2.5
-2.5
5 .0
5.D
-1.0
-2.5
11111
0.1
11111
1.1
11,1,1.
2.1
5.0
3.2
x1
(a)
(b)
(c)
(d)
5.2
2.6
-2.5
-5.0
Figure 5.21
Steady state probability density functions showing the effect of noise to the
chaotic response with various noise intensities in 2-D contour maps (=0.03, a=10, (3 =1,
F0=4.5): t=10th cycle; (a) q=0.0002, (b) q=0.0006, (c) q=0.002, (d) q=0.01.
148
(a)
(b)
(c)
(d)
Figure 5.22
Steady state joint probability density functions showing the effect of noise to
chaotic response with various noise intensities in 3-D contour maps
a=10, 13=1,
F0=4.5): t=10th cycle; (a) q=0.0002, (b) q=0.0006, (c) q=0.002, (d) q=0.01
149
of the attracting domain that the deterministic chaotic response covers in the phase plane
(Figure 5.20b). At the 3' cycle, the distribution of the ensemble almost covers up the whole
chaotic domain; and at the 4th cycle, it finishes filling up the attracting domain and shows
the same shape as the corresponding chaotic attractor (Figures 5.20c and d). The PDF is
stabilized and clearly shows the same fractal look of the deterministic chaotic response at the
early 6th (Figure 5.20e). After reaching steady-state, the PDFs stay in the same shape,
displaying stationarity in the phase plane (Figure 5.200. Hence, it is concluded that the
steady-state PDF can portray the fractal structure of the counterpart deterministic chaotic
response and the distribution of the ensemble in the phase plane.
The effect of noise on chaotic response was found to broaden and eventually destroy
the strange fractal attractor in the phase plane (see Figure 5.7). The steady-state PDFs of the
systems with different noise intensities are generated to determine the effect of noise on the
PDFs of the ensemble belonging to the disturbed chaotic responses (Figures 5.21 and 5.22).
With a low noise intensity (q = 0.0002), the PDF shows the fractal structure of chaotic
response (Figure 5.21a). With a higher noise intensity, (q = 0.0006), the boundary of the
PDF is expanded with low probability and the fractal shape is smoothed out a little bit
(Figure 5.21b). At noise intensity q =0.002, the PDF is expanded much wider, and the
chaotic fractal shape is almost unrecognizable (Figure 5.21c). When a much higher noise
intensity is applied to the system, the PDF shows random-like distribution and the boundary
of the PDF no longer shows any indication of chaotic response (Figure 5.21d).
The same PDFs are presented in 3-D contour maps in Figure 5.22 to determine the
transition of the probability of distribution of the ensemble with low noise intensity to that
of high noise intensity. With low noise intensity, the PDF shows that all the responses are
150
gathered inside the attracting domain of chaotic response (Figure 5.22a). With noise
intensity at q = 0.0006, the PDF does not show much difference except for the wider
boundary (Figure 5.22b). With higher noise intensity, the PDF is much smoother than the
one with smaller noise intensity, and the boundary of PDF becomes less observable (Figure
5.22c). When noise intensity reaches q = 0.01, the PDF becomes so smoothed out and is
almost flat compared to the others (Figure 5.22d). Note that in Figure 5.22d, the value of
probability is scaled up by ten folds to be visible.
From the observations of the evolution of PDFs and PDFs with different noise
intensities, it is found that the PDF of chaotic response quickly reaches steady-state
compared to the subharmonic responses. This indicates that the ensemble of the perturbed
chaotic responses with low noise intensity, starting from virtually the same initial conditions,
immediately fills up the attracting domain of chaotic response. As noise intensity increases,
the chaotic response becomes difficult to be identified, but with relatively high noise
intensity, compared to the periodic response, the PDF still shows the fractal structure,
revealing the existence of chaos until the noise level goes beyond a critical level.
5.3.3 Coexisting Responses
A deterministic system with a given set of fixed parameters may have two or more
coexisting periodic responses. The response amplitude curve (Figure 4.1) shows the
presence of possible coexisting responses of piecewise-linear systems. Coexisting responses
can be obtained by scanning a wide range of initial conditions of the deterministic system.
151
It may be potentially dangerous for designers to simulate the system responses using
a small number of initial conditions, since those initial conditions employed may reveal only
small amplitude responses, while missing other large amplitude coexisting responses.
Thompson et al. (1984) emphasized the dangers of missing a subharmonic resonance in
simulations. The coexisting responses result from the initial perturbations, so in the
stochastic systems, the coexisting responses may exist in the system, starting from fixed
initial conditions, due to the external perturbations.
From the analysis of the PDFs of a subharmonic response, it is found that coexisting
responses arise from the system with external noises, which may start from unique initial
conditions. This implies that under the presence of external fluctuations, system response
starting from the same initial conditions, can reach different coexisting attractors. Hence,
even with given initial conditions that generate low amplitude responses in the deterministic
system, all coexisting responses should be concerned in the noisy environments.
In this section, two types of systems are examined: one has two coexisting harmonic
responses and the other has multiple coexisting responses. The PDFs of these systems are
generated to determine the evolution of the distribution of ensembles. The stronger response
among the coexisting responses are verified.
First, the system with two coexisting harmonic responses is examined (Figure 5.23).
Figure 5.23a shows the two coexisting responses in phase plane with corresponding Poincare
points. The distribution of these two harmonic responses is represented in the wide range
of initial conditions. The occurrence of two harmonic responses of the same system
indicates the sensitivity of the piecewise-linear system to the initial conditions (Figure
5.23b). The ratio of the occurrences of large amplitude responses to small amplitude
152
4.00
2.00
0.00
CN
x
2.00
4.00
6.00
6.00
4.00
2.00
2.00
0.00
4.00
x1
(a)
50
4
3
2
0
0
0
0
0
0
0
0
0
00
00
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0x 1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
x
x
x
0
0
0
0
0
O)
0
0
0
X
0
0
0
0
0
0
0
>2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
00
0
0
0
0
0
0
0
0
0
0
0
00
X
0
0
0
0
0
0
0
1
2
3
c\J
o
-c 3
5
0
0
0
0
0
0
0
0
Ii
0
0
5 4 3 211111
1
i
-7
I
4
5
initial displacement (x01)
(b)
Two harmonic coexisting responses ( =0.03, a=10, P=2.5, F0=0.48): small
Figure 5.23
amplitude response (x), large amplitude response (0); (a) phase trajectories and Poincare
points; (b) distribution of the responses in the domain of initial conditions
153
responses is high (95%), exhibiting the dominance of the large amplitude responses in the
wide range of given initial conditions.
The evolution of the PDF demonstrates how the responses are evolving from the
deterministic initial conditions and how they settle down in the steady-state (Figure 5.24).
Here, again the initial conditions are given by a delta function at X(0,0), which gives the
system a small amplitude response in the deterministic system. At the 6th cycle, most
responses are gathered around the attractor of the small amplitude response, while a part of
the responses starts to move away from the small amplitude attractor making a tail at the
boundary of the attracting domain (Figure 5.24a). The end of the tail coming from the small
amplitude attractor is now moving toward the large amplitude attractor after the 11th cycle
(Figure 5.24b). At the 19th cycle, the attracting domain of the large amplitude response starts
gaining probability as more responses gather around it (Figure 5.24c). As even more
responses are moving from the small amplitude response to the large amplitude attractor, the
tail is broken and two coexisting responses are separated at the 24th cycle (Figure 5.24d).
After the 31th cycle, most responses ceases shifting to the attracting domain of the large
amplitude response, leaving only a small portion of responses around the small amplitude
attractor (Figure 5.24e). Finally, at the 39th cycle, the PDF, reaches its steady-state,
demonstrating that all the responses have moved to the large amplitude response (Figure
5.24f).
Based on the above results, it can be observed that the small amplitude response is
destroyed, and only the large amplitude responses dominate under the presence of external
noise. The system starting from the initial conditions, which generate the small amplitude
154
x1
(a)
'...;<4
(b)
6.0
6.0
3.2
3.2
'
05
-3.0
x `'ic
111111111i/1111111
19
4.3
1.9
1.9
4.3
6.9
5.0
6.8
4.3
III11111
6.8
6.0
3.2
32
3.2
0.5
0.5
1111111111111111111111
4.3
1.9
6.0
0.5
(e)
4.3
X
0.02
19
XI
6.0
(d)
3_2
_5.0
6.8
1111111111111111111
5.0
6.8
X
-3.0
4.3
05
(c)
6.0
1.9
68
`;14
5.0
1 .9
4.3
6.8
6.0
5.0
X
(0
Figure 5.24 Evolution of the joint probability density function f(xl, x2 ; t) of two harmonic
coexisting responses in 2-D contour maps (=0.03, a=10, 13=2.5, F0=0.48, q=0.0002): (a)
6th cycle, (b) 11 m cycle, (c) 19th cycle, (d) 24th cycle, (e) 31th cycle, (0 3 9th cycle.
155
-6.0
-2.4
9.0
1.3
4.9
8.5
9.0
9.0
6.0
-2.4
1.3
1111
4.9
8.5
9.0
1
F
4.8
4.8
4.8 F
4.8
x 0.5
0.5
0.5
0.5
F
-3.8
8.0
6.0
"
-2.4
4.9
IIII
3.8
-3.8 r
8.0
8.0
-3.8
lilt/1111111
-6.0
8.5
-2.4
1.3
11111111
4.9
xl
8.0
8.5
(b)
9.0
6.0
-2.4
1.3
4.9
8.5
-6.0
9.0
9.0
4.8
4.8
4.8
X 0.5
0.5
3.8
_8.0 t
$ 11111111,1111111 ,:11"
6.0
Figure 5.25
-2.4
1.3
4.9
8.5
-2.4
3.8
-3.8
8.0
-8.0 1111 1 11
-6.0
-2.4
1.3
4.9
1111111111:11111
1.3
x1
x1
(c)
(d)
4.9
8.0
8.5
Steady state joint probability density functions showing the effect of noise to
two coexisting harmonic responses with various noise intensities in 2-D contour maps
a=1O, p=2.5, F0=0.48): (a) q=0.00002, (b) q=0.0002, (c) q=0.002, (d) q=0.02.
156
responses, turns out to have large amplitude responses under the influence of the external
noise.
The effect of noise on these two harmonic coexisting responses are also examined
by investigating steady-state PDFs of the same systems with different noise intensities
(Figure 5.25). With a small noise intensity (q = 0.00002), the steady-state PDF shows that
both small and large amplitude responses coexist (Figure 5.25a). With a higher noise
intensity (q = 0.0002), the PDF shows that only the large amplitude response remains at
steady-state (Figure 5.25b). The PDF is smoothed out and the boundary of PDF is expanded
wider as the noise intensity gets higher, showing that the responses are spreading away from
the boundary of the attractor (Figure 5.25c). It is observed that a major portion of the
responses continues to be attracted to the large amplitude response. With a much higher
noise intensity (q = 0.02), although the highest probability occurs at the large amplitude
attractor, the probability is very small and the PDF is flattened to look like a Gaussian
distribution, indicating random behavior in the system responses (Figure 5.25d). It can be
seen that the attractor of the large amplitude response has also lost its attraction under the
presence of the high intensity of noise.
From the results of the PDFs of the perturbed subharmonic response, it was found
that the PDF can unveil the coexisting attractors in addition to showing the subharmonic
response under the high noise level (Figures 5.16 - 17). Now, the PDFs of the system with
multiple coexisting responses, which are a harmonic and different P-2 subharmonic
responses, are represented to observe the characteristics of the system behaviors and also to
investigate the capability of the PDF to show the possible coexisting responses. The multiple
coexisting responses are represented in Poincare sections simultaneously (Figure 5.26a).
7.0
5.0
3.0
1.0
O
-3 0
A
Cl
_5.0
_7.0
1.0
0.5
2.0
3.5
5.0
55
B.0
XI
(a)
2
,---­
ci
-_,
1
L)
o
-E)
c
-
0 0 0 0 0 0 * 0 0 0 x
0 0 0 0 0 * * 0 0 4
000000 *00x
0xx0000000X
0xxx0000000
0
xx x000
O
X
AA
00
A
xAAXA44 p x00
x L\ x x A x ° a 0 0
xxxx0
x0x000.tz
-4 -3 -2 -1
.initial
x000
0
5
disp1ace ent x01)
(b)
.9, Po----4).. (a) POillCare
Figure 5.26 Multiple coexisting responses (E,--043,
points of coexisting responses; (b) distribution of responses in the clornain of initial
conditions; harmonic response o (response 1); P-2 subharronic responses ---­
2), A (response 3), 0 (response 4), .1'.1 (response 5).
(response
158
7.0
1.0
8.0
7.0
5.8
3.5
111111-1111-11-1-1-111-111111
1.3
3.5
-1 0
7.0
1.3
3.5
5.8
3.5
8.0
7.0
3.5
j
ti -0.0
0.0
-3.5 -
-3.5
-3.5
7.0
_7 0
1111
7.0
-1.0
1.3
3.5
5.8
xl
0.0
8.0
-3.5
li111111111111111111111
1.0
1.3
-1.0
1 .3
8.0
5.8
8.0
7.0
(b)
5.8
3.5
1
3.5
-1.0
8.0
7.0
7.0
3.5
3.5
1.3
3.5
3.5
-0.0
D.0
-3.5
3.5
7.0
-1.0
111111111111111111
1.3
3.5
xl
5.8
8.0
7.0
(c)
Figure 5.27
7.0
5.8
x1
(a)
7.0
3.5
-3.5
-7.0 1111111
-1.0
1.3
3.5
11111111,1111
3.5
x1
5.8
7.0
8.0
(d)
Steady state joint probability density functions of multiple coexisting responses
with different noise intensities (=0.03, a=10, P=1.9, F0=4): (a), (b) q=0.0002; (c), (d)
q=0.002; (a), (c) 49th cycle; (b), (d) 50th cycle.
159
There are five coexisting responses from the same system upon the given initial conditions:
one harmonic response (0) and four P-2 subharmonic responses (x, e, 0, *). A response is
symbolized by a same character.
For example, O's represent Poincare points of a
subharmonic response among the coexisting responses. The distribution of coexisting
responses are demonstrated in the domain of initial conditions (Figure 5.26b).
Steady-state PDFs are examined for the same system with different noise intensities:
one low and one high.
With both low and high noise intensities, the PDF shows
subharmonic motion in the Poincare sections (Figure 5.27). With a relatively low noise
intensity, the PDF reveals two coexisting attractors in Poincare sections (Figures 5.27a and
b). A harmonic response (0) appears every cycle, while the subharmonic response ( x)
repeats itself at every second forcing cycle. With a high noise intensity, the PDF again
shows the P-2 periodic motion with the different shape of the probability distribution of the
responses (Figures 5.27c and d). The PDF now covers the attracting domain of all the
coexisting responses. Most responses are concentrated into a harmonic response (0) and a
subharmonic response ( x), with the other subharmonic responses (A *) coexisting. In a
deterministic system, a harmonic response has one point in the Poincare section, while the
P-2 subharmonic responses have two points in the Poincare sections. When the Poincare
section is observed at each forcing cycle, the P-2 subharmonic response should have one
Poincare point at a forcing cycle, and have the other Poincare point at the next forcing cycle.
The PDF shows the probability distribution of these coexisting P-2 subharmonic responses
at each forcing cycle while the harmonic appears at every cycle. From Figure 5.26b, when
responses obtained from the small range of initial conditions (-2 s x01 < 2 and -2 < x02
it can be seen that the coexisting response (*) is missing. However, the PDF shows the
160
existence of the response (*) in the probability distribution. Hence, to reveal all the
potential coexisting responses, it is suggested that the variety of initial conditions should be
used with combination of the PDFs with the appropriate noise intensity.
From the examination of coexisting responses, it is found that, unlike deterministic
systems, coexisting responses can take place from the system starting from unique initial
conditions.
Hence, for systems with external noises, coexisting responses should be
considered, even in the case, where the initial conditions are given so that the deterministic
system only has small amplitude responses. It is also found that the stronger response are
dominating in the steady-state responses. The PDF of path-integral solution is found to
successfully reveal the attracting domain of all potential coexisting responses in the
probability distribution of the ensembles.
5.3.4 Comparison of Probability Density Functions with Time Domain Simulations
The path-integral solution and numerical solution are not exactly comparable since
the expression of the white noise is different in both methods. As described earlier, in the
numerical simulation of the stochastic piecewise-linear system, the white noise is generated
from the summation of sinusoidal function and has a finite number of frequencies within the
given band limit. In contrast, the path-integral solution is an analytical expression of the
joint PDF of the FPE equivalent to the stochastic piecewise-linear system. In the FPE, the
white noise possesses the frequencies in the infinite width the same as a real white noise.
Hence, the variance of white noise in the numerical solution has a finite value; but in the
161
70
6-1
3.5
13
3.5
5.8
8.0
7.0
1111-111)7111.1111111
3.5
C\I
, -0.0
3.5
7.0
,
-1.0
..7
,
,
35
x1
1.3
,
5
,
,
9.3
3.5
cJ, -0.0 r
-0.0
-3.5 r
-3.5
7.01.0
3.5
x1
13
(a)
8 0
/ .0
(b)
7.0
3.5
Cs4, -0.0
3.5
7.0
-1.0
3.5
1.3
5.7
B.0
-1.0
X1
(c)
5.0
-0.5
5.0
0.7
IIIIIIIIIIII1111
1.8
111.11111
3.0
5.0
2.7
23
2.0
x 05
C\J
-1.0
-1.0
- 1.8
4.0
-0.5
0.4
1.2
x1
(e)
Figure 5.28
2.1
3.0
4.0
4.0
1.8
.7
3,0
x1
(0
Comparison of numerical solutions(No. of realizations=1000) and PDF's of
path integral solutions: (a), (b) two coexisting responses (=0.03, a=10, f3=1.9, F0=4,
D=0.08, q=0.0002); (c), (d) multiple co-existing responses (=0.03, a=10, 13=1.9, F0=4,
D=0.2, q=0.002); (e), (0 chaotic response (=0.03, a=10, (=1, F0=4.5, D=0.045, q=0.0003).
162
FPE, its variance is infinite. With this in mind, comparisons of PDFs with the results from
the direct numerical integration are made.
PDFs and ensembles of various types of responses are depicted in Figure 5.28. The
ensembles are generated with a sample size of N = 1000 on the Poincare sections, and both
the PDFs and the ensembles are selected at the 50th forcing cycle. The PDF shows the
probability distribution that equally matches the corresponding ensembles. Therefore, the
path-integral solution works correctly and the PDF successfully predicts the response
behavior in the probability domain.
5.4 System Responses with Narrow-Band Excitations
Responses of a piecewise-linear system with narrow-band excitations are presented
in this section. As mentioned earlier, the narrow-band excitation can be expressed as the
summation of sinusoidal functions over the narrow range of frequencies. For convenience,
this expression is used in both the time domain simulations and the path-integral solutions.
Due to the nature of the narrow-band excitation, the range of frequency is selected
to be small (0,,
Q.). In the limiting case when the frequency width yields to zero (0,,,
= 0.), the narrow-band excitation becomes a deterministic harmonic excitation with the
center frequency as the dominant frequency. Hence, it is expected that the response of the
system with the extremely narrow-band excitation may exhibit a response similar to that of
the counterpart deterministic system.
In Figure 5.29, the Poincare map of a single sample and PDF of the ensemble are
illustrated. The Poincare sections for both time simulation and PDFs are obtained by setting
163
4.0
6.0
-4.0
-2.8
4.0
-2.8
4.0
-1 .5
0.3
1 .0
-0.3
1.0
IIIIII/111111111111_ 4.0
111/1111111111
1.5
1.5
-1.0
-3.5
-6.0
-3.5
1E11111111_11
4.0
-2.8
_111
-1 .5
v1
111111
0.3
" 1 .0
6.0
(b)
Response behavior of the piecewise-linear system under a narrow-band
Figure 5.29
Qmax)=(0.9999, 1.0001); (a) Poincare maps (D=4.5);
excitation (--0.03, a=10, P=1):
(b) joint probability density function (D=4.5, q=0.0002).
164
5
4.0
4.0
1.0
IIIIIIIIT11,1111,11111.11,I111111I1
4.0
1.5
1.5
1/111111111111111/11111111/11l11/
6.0,
4.0
1.5
111111111111111111111
6.0
0
1.0
6.0
0
K1
(b)
4.0
1.0
4.0
4.0
1.5
1.5
1.5
1.0
111,111111111_4.0
0
1.5
-1.0
6.0
.1111111.11111111/11.11111111111111111111
6,0
6.0
11111111111111111111,111111111111
1.0
.0
(d)
(c)
4.0
1 0
40
1.6
4.0
4.0
1.5
1.5
-1.0
_6.0
6.0
xl
X
11111111.11111111111111,1111111111/111
6.0
1.0
IIIITIfIlITTI
4.0
1.5
x -1.0
1111,,
1111111.1.11111,11C
6.0
1.0
1.0
xl
x1
(e)
(f)
Figure 5.30 Evolution of the joint probability density functions of the system response
13=1, D=4.5): (S),i, CL)=(0.9999,1.0001);
under a narrow-band excitation
(a) initial condition; (b) rd cycle, (c) 4th cycle, (d) 5th cycle, (e) 7th cycle, (f) 10th cycle.
165
6.0
1 .5
-1 .3
-2.6
0.1
11111111.1 II,11111!$I17171IIIII1111111 6.0
2.6
2.6
-4.0
.\1)< -0.7
-0.7
-4.1
4.1
7.5
111111111111i1[1111111111111111,111t111- _7.5
-1.3
1.5
4.0
-2.6
O. 1
X1
(a)
4.0
itittiit-1.3
-2.6
6.0 m illii
0. 1
1.5
1111,,IIIIII_
6.0
2.6
2.6
-0.7
X-0.7 I--
4.1
_7.5
4.0
-2.6
mm111_1_1111,1 [MIMI _7.5
-1.3
0.1
1.5
X
(b)
Figure 5.31
Effect of noise to the responses of the systems under narrow-band excitations
(=0.03, a=10, 13 =1, D=4.5): (52ii, Q,,,J=(0.9999,1.0001); (a) q=0.002, (b) q=0.02.
166
the center frequency as the driving frequency (Of = (0.+Q,)/2). The Poincare map shows
the fractal structure of chaotic responses, such as the deterministic system. Note that it has
the same shape as the counterpart deterministic chaotic response with a phase shift (0=
it).
The corresponding PDF also shows that the probability distribution reveals the same
structure of the system responses, indicating ergodicity (Figures 5.29a and b). The evolution
of PDFs are shown in Figure 5.30. The responses are forming the fractal look at the 4th cycle
after transient state (Figures 5.30b and c). After the 5th cycle, it almost covers the whole
attracting domain of chaotic response (Figure 5.30d), and the PDF reaches steady-state at 7th
cycle (Figure 5.30e and f). From these results, the behavior of the response with a narrow­
band excitation is found to have the same characteristics as the deterministic chaotic response
when the bandwidth is extremely narrow as expected.
The noise effect to the responses of the system with narrow-band excitation is also
examined and demonstrated (Figure 5.31). Compared to the response of the system with
excitation with lower noise intensity (q = 0.0002; Figure 5.29), the PDFs with higher noise
intensities (q = 0.002) expands further and is smoothed out, especially on the boundaries,
losing the fractal structure of the chaotic response (Figure 5.31a). With high noise intensity
(q = 0.02), the PDF indicates that the responses are widely distributed throughout the entire
domain of the phase plane. The fractal structure cannot be observed, indicating that the
Gaussian white noise destroys the chaocity in the system responses (Figure 5.31b). Hence,
the noise effect is mainly destruction of the chaotic responses when the noise intensity is
high for the system with narrow-band excitations. Hence, the response behavior of the
system under the narrow-band excitation is found to be similar to that of the deterministic
systems.
167
CHAPTER 6. SUMMARY AND CONCLUSIONS
A nonlinear offshore structure is modeled as a piecewise-linear system and the
response behaviors are investigated under both deterministic and stochastic excitations.
From the analysis of the deterministic system, preliminary information of the system
behaviors is obtained for further analysis from a stochastic perspective. In the ocean
environment, randomness is unavoidable, making study of the system behaviors under the
presence of an external random noise essential.
In the deterministic case, the effects of parameter variations on the responses are
examined. The more realistic approach to understand the system behaviors are attempted by
using the systems under random excitations. Stabilities of responses under various noise
intensities, including regular and chaotic motions, are investigated. The routes to chaos in
period-doubling processes with and without the external fluctuations are examined and
compared. Stationarity and ergodicity of the piecewise-linear system are verified in the
chaotic responses. Ensembles of the system responses are examined via time domain and
probability domain simulations.
A semi-analytical procedure has been developed to compute the joint probability
density functions (PDF) of the Markov processes of system responses under random
excitations via path-integral solutions. Results of path-integral solutions are confirmed by
the numerical simulations.
Potential coexisting responses of piecewise-linear systems are examined. It is found
that coexisting responses can arise in the externally perturbed system even with fixed initial
conditions.
168
6.1 Summary of Results
For convenience, the results are divided into the deterministic system and the
stochastic system.
6.1.1 Deterministic System
The deterministic piecewise-linear system is found to possess various types of
responses including harmonic, subharmonic, superharmonic and chaotic motions. Through
parametric analyses, the attraction domains of each parameter for all the responses are
identified.
Characteristics of the responses are studied and the chaotic responses are
examined. The influence of each parameter to the system response behavior are also
examined.
The following trends are found through in the deterministic systems.
(1)
The Piecewise-linear system exhibits typical nonlinear behaviors including
subharmonic and chaotic responses, and sensitivity to initial perturbations.
(2)
Most chaotic responses occur when the excitation frequency is close to the natural
frequency of the inside (locally linear) system of the piecewise-linear system.
(3)
Period-doubling and tripling processes are found to exist.
(4)
Quasi-periodic responses occur only for extremely low damped systems with low
stiffness ratios. With sufficiently high damping ratio (> 0.001), quasi-periodic
responses disappear. With high stiffness ratios (a = 10), the undamped, or slightlydamped system shows random-like behaviors.
(5)
Chaotic responses occur for the system with a z 8.
169
(6)
Damping can control the appearance of chaotic responses. When the damping ratio
is within 0.01 s
s 0.26, chaotic response can be found. Higher damping ratios
shrink the boundary of chaotic responses, and beyond the critical value ( > 0.26),
damping reduces chaotic response to regular responses.
(7)
Most chaotic responses occur when the excitation frequency is close to the natural
frequency of the inside system (0.8 s (3 s 1.1).
(8)
With the same excitation frequency, chaotic responses have the close shapes with
different amplitudes and damping ratios. The shapes of chaotic responses depend on
the excitation frequency.
(9)
As stiffness ratio increases (a z 8), excitation amplitudes decrease for chaotic
responses to occur.
6.1.2 Stochastic System
Markov process analyses are conducted semi-analytically by using analytical short-
time propagator with conjunction of numerical methods. The results of the path-integral
solutions of Fokker-Planck equations are confirmed by numerical simulations. Probability
domain analyses are conducted by using the path-integral solutions. Analyses and numerical
results of the stochastic piecewise-linear system are summarized as follows:
(1)
Noise effects are examined on two different subharmonic responses: period-2 (P-2)
subharmonic response away from the bifurcating point and P-2 response near the
bifurcating point to chaos. The noise effects on both subharmonic responses are
different. Responses away from the bifurcation become random, with Poincare
170
points spreading over a wide range of the phase space. On the other hand, the
response near the bifurcation loses its periodicity more easily, and the Poincare
points form the shape of a chaotic attractor, even under relatively high noise
intensities.
(2)
For the system with external randomness, routes to chaos in the periodic-doubling
processes are less apparent. While the deterministic counterpart shows higher
periodic responses, the noisy system response skips the higher periodicity and
becomes chaotic abruptly, leaving inaccessible gaps in the bifurcating cascade. It is
observed that the subharmonic responses with period higher than P-4 are not
obtainable in the system with even a low noise intensity.
(3)
Chaotic responses are found to be relatively more stable than the periodic responses.
Chaotic attractors can be clearly detected up to a noise variance of lc = 5%, whereas
periodic responses completely lose their periodic attractors at this noise level.
Eventually, when noise intensity increases beyond a critical level (x = 20c,v0), the
responses, observable in deterministic systems can no longer be clearly identified,
and the system shows mainly random responses.
(4)
The presence of random noise with intensity within the critical value increases the
strength of chaotic attractors.
It induces nearby periodic responses (under
deterministic excitations) around bifurcation points toward chaos.
(5)
Mean Poincare maps are found to be useful in the analysis of systems with higher
noise intensities. From comparisons of mean Poincare maps to the regular Poincare
maps, it is observed that the mean Poincare holds the response stronger under
external noises, by clearly showing the chaotic attractors in the phase plane, while
171
regular Poincare maps lose the attractors and become random. In addition, the mean
Poincare map also enhances the fractal structure of chaotic responses by averaging
out the noise effect. It shows much sharper images than the regular Poincare map
under the presence of external noises.
(6)
Stochastic processes of chaotic responses are found to be non-stationary.
(7)
The first order probability density function and the ensembles of Poincare sampled
processes are stationary and ergodic.
From the ensemble average and auto-
covariance, the Poincare sampled processes of chaotic responses are weakly
stationary and the processes of the sample means are found to be ergodic. The
ensemble average and auto-covariance are independent of the sampling time, and the
auto-covariance is only dependent on time-interval. The covariance of tth sample
mean Nit and tth observation X(t) converges as time increases, showing ergodicity.
(8)
Results from both numerical simulations and solutions of the equivalent FokkerPlanck equations confirm that the PDF 's of the semi-analytical procedure accurately
predict the system behaviors in the probability domains. The semi-analytical
solution procedure can provide an efficient means to study the nonlinear stochastic
behaviors of the system response.
(9)
Noise effects to system responses are examined using the PDF's and results are
confirmed via time domain simulations.
(10)
Systems with coexisting responses have been analyzed by examining the evolution
of PDF's, which show the evolution of the ensemble of the system responses. Two
types of system responses are examined: one has two coexisting harmonic responses
and another has multiple coexisting responses. For the case of two coexisting
172
responses, the PDF shows that the stronger response remains under higher noise
intensities.
For the case of multiple coexisting responses, the PDF shows the
dominant coexisting responses under low intensity noise. With increasing noise
intensity, the PDF reveals the potential existence of the multiple coexisting
responses.
In the deterministic systems, coexisting responses occur from the
perturbation in initial conditions. The PDF successfully reveals the presence of the
coexisting responses in the noisy environment, even starting from unique initial
conditions.
(11)
System under narrow-band excitations are found to have similar responses as the
system subject to harmonic excitation with dominant frequency equal to the mean
frequency of the narrow-band excitation.
6.2 Conclusions
Stability of both periodic and chaotic responses found in the deterministic systems
are examined with additive external white noise in the stochastic systems. The response
behaviors of systems with narrow-band excitations are also examined. Noise effects to the
responses are observed, and the bifurcation with and without external noise are studied to
determine the alteration in the cascade from periodic responses to chaotic responses. The
unaccessible portion of the bifurcating path are found through the examination of the
perturbed bifurcations.
A system with a given set of parameters may have two or more coexisting periodic
responses. The one of the coexisting responses in a given simulation is dependent solely on
173
the initial conditions, from which the system starts. Missing the large amplitude responses
in the predictions may leave the potential danger for designing such structures.
For deterministic systems, knowledge of responses in the entire range of initial
conditions is needed to detect the possible coexisting responses. By limiting the initial
conditions to the desired values, the large amplitude responses may be avoidable. However,
in field environments such as the ocean, the presence of noise is inevitable. From
observations of the evolution of PDF and the steady-state PDF' s, it is found that coexisting
attractors can appear from the fixed initial conditions under the presence of external noise.
It is found that coexisting responses are dependent not only on initial conditions, but
also on the intensity of the external noise. Low amplitude responses originated from a
particular initial condition may bifurcate to large amplitude response under the presence of
external randomness with sufficiently large noise intensity. Hence, in the stochastic case,
all potential coexisting periodic responses need to be considered.
From the results of coexisting responses, the PDF of the Fokker-Planck equation has
been found to successfully unveil coexisting responses under the presence of the external
random noise. Also, the PDF can determine the strength of various coexisting responses.
Therefore, with the availability of the PDF via the Fokker-Planck equation, potentially
dangerous, large amplitude responses may be predicted.
The behavior of chaotic responses are "unpredictable" in a deterministic sense.
However, analysis in the probability domain can provide significant information of the
system behavior. Rather than predicting the exact response occurrence in succession,
practical estimates of the overall distribution of the system responses is obtained. It is found
that the predicting procedure developed in study using the path-integral solution can
174
successfully predict the probability or likelihood that the response will attain the particular
range of steady-state positions.
6.3 Recommended Future Study
The path-integral procedure is found widely applicable to the system with random
excitations in identifying coexisting response attractors, or predicting the probability
distribution of the system responses. However, simulations require large amount of
computational and processing time. For example, to reach 100 cycles, it takes a Pentium 120
MHZ processor with 16 MB RAM more than 24 hours. If the noise intensity increases, the
computing time increases dramatically. The numerical procedure uses moving boundary of
the probability domain, and the probability domain consists of NxN segments. As the
response domain expands, the number of segments N increases. Also, the size of the
executable of the numerical program becomes enormous. For this reason, the noise intensity
was limited so that the N would not exceed a certain value (N < 1000). Migration of this
analysis programs to high-speed machines will significantly enhance the prediction
capability.
This research has been conducted as a primary step to investigate the response
behaviors of the offshore structures with nonlinear restoring forces due to geometric
configuration of the mooring cables. An experiment was carried for the mooring system, in
which the cable stays taut (Yim et al. 1993). Currently, proper system coefficients for direct
comparisons are being identified. The search for the better models may be followed and also
175
appropriate experiments would be made to validate both the numerical and semi-analytical
solutions.
The followings are suggested potential future studies:
(1)
Appropriate experiments should be conducted to validate the predicting methods
developed.
(2)
It is found that the chaotic responses occur when the system has stiffness ratio (a
8). It is suggested to use configurations with a higher stiffness ratio in future
experiments to examine chaotic motions.
(3)
Various models of the piecewise-nonlinear system should be analyzed to simulate the
response for better accuracy.
(4)
Effects of nonlinear drag force on system responses should be examined.
(5)
Alternative numerical methods, including finite difference, should be examined to
compare the results of the path-integral solutions.
176
BIBLIOGRAPHY
Chakrabarti, S. K. (1987). Hydrodynamics of Offshore Structures. Springer-Verlag, Berlin
Heidelberg.
Choi, Han S. (1991). "Non-Linear Behavior and Chaotic Motions of an SDOF System with
Piecewise-Non-Linear Stiffness." Int. J. Non-Linear Mechanics, 26(5), 461-473.
Choi, Y. S. and Noah, S. T. (1988). "Forced Periodic Vibration of Unsymmetric PiecewiseLinear Systems." Journal of Sound and Vibration 121(1), 117-126.
Clough, R. W. and Penzien, J. (1975). Dynamics of Structures. McGraw-Hill, New York.
Crutchfield, J. P. and Huberman, B. A. (1980). "Flutuations and the Onset of Chaos."
Physics Letters, 77A(6), 407-410.
Crutchfield, J., Nauenberg, M. and Rudnick, J. (1981). "Scaling for External Noise at the
Onset of Chaos." Physical Review Letters, 46(14), 933-935.
Crutchfield, J. P., Farmer, J. D. and Huberman, B. A. (1982). "Fluctuations and Simple
Chaotic Dynamics." Physics Reports. 92(2), 45-82.
Dao, B. V. and Penzien, J. (1982). "Comparison of Treatments of Non-linear Drag Forces
Acting on Fixed Offshore Platforms." Applied Ocean Research, 4(2), 66-72.
Davies, H. G. and Liu, Q. (1990). "The Response Envelope Probability Density Function
of a Duffing Oscillator with Random Narrow-Band Excitation." Journal of Sound
and Vibration, 139, 1-8.
Dean, R. G. and Dalrymple, R. A. (1984). Water Wave Mechanics for Engineers and
Scientists. World Scientific, Singapore.
Ertas, A. and Lee, J-H. (1989). "Stochastic Response of Tension Leg Platform to Wave and
Current Forces." Journal of Energy Resources Technology. 111, 221-230.
Feigenbaum, M. J. (1983). "Universal Behavior in Nonlinear Systems." Physica 7D, 16-39.
Gardiner, C. W. (1985). Handbook of Stochastic Methods for Physics, Chemistry and the
Natural Sciences. 2nd. Ed. Springer-Verlag, Berlin Heidelberg.
Gerald, C. F. and Wheatley, P. 0. (1989). Applied Numerical Analysis. 4th Ed. AddisonWesley Publishing Company, New York.
177
Gottlieb, Oded and Yim, Solomon C. S. (1992). "Nonlinear Oscillations, Bifurcations and
Chaos in a Multi-Point Mooring System with a Geometric Non linearity." Applied
Ocean Research, 14, 241-257.
Graham, R. (1977). "Path Integral Formulation of General Diffusion Processes." Zeitschrift
fur Physik B, 26, 281-290.
Haken, H. (1976). "Generalized Onsager-Machlup Function and Classes of Path Integral
Solutions of the Fokker-Planck Equation and the Master Equation." Zeitschrift fur
Physik B, 24, 321-326.
Hayashi, C. (1985). Nonlinear Oscillations in Physical Systems. Princeton University Press,
New Jersey.
Huang, Y. M., Krousgrill, C. M. and Bajaj, A. K. (1989). "Dynamic Behavior of Offshore
Structures with Bilinear Stiffness." Journal of Fluids and Structures, 3, 405-422.
Jung, P. and Hanggi, P. (1990). "Invariant Measure of a Driven Nonlinear Oscillator with
External Noise." Physical Review Letters, 65(27), 3365-3368.
Kapitaniak, Tomasz. (1988). Chaos in Systems with Noise. World Scientific, Singapore.
Kapitaniak, T. (1991). "The Loss of Chaos in a Quasiperiodically-Forced Nonlinear
Oscillator." International Journal of Bifurcation and Chaos, 1(2), 357-362.
Kingman, B. (1965). Wind Waves their generation and propagation on the ocean surface.
Prentice-Hall, Inc, New Jersey.
Li, G. X., Rand, R. H. and Moon, F. C. (1990). "Bifurcations and Chaos in a Forced ZeroStiffness Impact Oscillator." Int. J. Non-Linear Mechanics, 25(4), 417-432.
Lichtenberg, A. J. and Lieberman, M. A. (1992). Regular and Chaotic Dynamics. 2nd Ed.
Springer-Verlag, New York.
Maezawa, S. and Furukawa, S. (1973). "Superharmonic Resonance in Piecewise-Linear
System." Bulletin of the JSME, 16, 931-941.
Maezawa, S., Kumano, H. and Minakuchi, Y. (1980). "Forced Vibrations in an
Unsymmetric Piecewise-linear System Excited by General Periodic Force
Functions." Bulletin of the JSME, 23, 68-75.
Moon, F. C. (1980). "Experiments on Chaotic Motions of a Forced Nonlinear Oscillator:
Strange Attractors." Journal of Applied Mechanics, Sep. 47, 638-644.
178
Moon, F. C. (1987). Chaotic Vibrations: An Introduction for Applied Scientists and
Engineeris. John Wiley & Sons, New York.
Moore, D. B. and Shaw, S. W. (1990). "The Experimental Response of an Impacting
Pendilum system." Int. J. Non-Linear Mechanics, 25(1), 1-16.
Natsiavas, S. (1989). "Periodic Response and Stability of Oscillators with Symmetric
Trilinear Restoring Force." Journal of Sound and Vibration, 134(2), 315-331.
Natsiavas, S. (1990). "On the Dynamics of Oscillators with Bi-linear Damping and
Stiffness." Int. J Non-Linear Mechanics, 25(5), 535-554.
Natsiavas, S. (1990). "Stability and Bifurcation Analysis for Oscillators with Motion
Limiting Constraints." Journal of Sound and Vibration, 141(1), 97-102.
Nayfeh, A. H. and Mook, D. T. (1979). Nonlinear Oscillations. John Wiley & Sons, New
York.
Nayfeh, A. H. and Sanchez, N. E. (1989). "Bifurcations in a Forced Softening Duffing
Oscillator." Int. J. Non-linear Mechanics, 24(6).
Newland, D. E. (1984). An Introduction to Random Vibrations and Spectral Analysis. 2nd
Ed. Longman, New York.
Ochi, M. K. (1990). Applied Probability & Stochastic Processes in Engineering and
Physical Sciences. John Wiley & Sons, New York.
Parzen, E. (1962). Stochastic Processes. Holden-Day, San Francisco.
Poddar, B., Moon, F. C. and Mukherjee, S. (1988). "Chaotic Motion of an Elastic Plastic
Beam." Journal of Applied Mechanics, 55, March, 185-189.
Risken, H. (1984). The Fokker-Planck Equation. Springer-Verlag, Berlin Heidelberg.
Roberts, J. B. and Spanos, P. D. (1990). Random Vibration and Statistical Linearization.
John Wiley & Sons, Chichester.
Sarpkaya, T. and Isaacson, M. (1981). Mechanics of Wave Forces on Offshore Structures.
Van Nostrand Reinhold.
Schulman, J. N. (1982). "Chaos in Piecewise-Linear Systems." Physical Review A. 28(1),
477-479.
Shaw, S. W. and Holmes, P. J. (1983). "A periodically Forced Piecewise Linear Oscillator."
Journal of Sound and Vibration, 90(1), 129-155.
179
Shaw, J. and Shaw, Steven W. (1989). "The Onset of Chaos in a Two-Degree-of-Freedom
Impacting System." Journal of Applied Mechanics, Mar. 56, 169-174.
Shaw, S. W. and Rand, R. H. (1989). "The Transition to Chaos in a Simple Mechanical
System." Int. J. Non-Linear Mechanics. 24(1), 41-56.
Shinozuka, M. (1977).
"Simulation of Multivariate and Multidimensional Random
Processes." Journal of the Acoustical Society of America, 49, 357-367.
Shinozuka, M, Fang, S. -L. S. and Nishitani, A. (1979). "Time-Domain Structural Response
Simulation in a Short-Crested Sea." Journal of Energy Resources Technology,
101, 270-275.
Spanos, P. D. and Agarwal, V. K. (1984). "Response of a Simple Tension Leg Platform
Model to Wave Forces Calculated at Displaced Position." Journal of Energy
Resources Technology, 106, 437-443.
Stratonovich, R. L. (1967). Topics in the Theory of Random Noise. I-II. Gordon and Breach,
New York.
Tang, D. M. and Dowell, E. H. (1988). "On the Threshold Force for Chaotic Motions for a
Forced Buckled Beam." Journal of Applied Mechanics, 55, March, 190-196.
Thompson, J. M. T., Bokaian, A. R. and Ghaffari, R. (1983). "Subharmonic Resonances and
Chaotic Motions of Bilinear Oscillator." Journal of Applied Mathematics, 31,
207-234.
Thompson, J. M. T., Bokaian, A. R. and Ghaffari, R. 1984. "Subharmonic and Chaotic
Motions of Compliant Offshore Structures and Articulated Mooring Towers."
Journal of Energy Resources Technology, 106, 106-198.
Thompson, J. M. T. and Stewart, H. B. (1986). Nonlinear Dynamics and Chaos. John Wiley
& Son, Chichesster.
Tung, P. C. and Shaw, S. W. (1988). "The Dynamics of an Impact Print Hammer." Journal
of Vibration, Acoustics, Stress, and Reliability in Design, Apr. 110, 193-200.
Wehner, M. F. and Wolfer, W. G. (1983). "Numerical evaluation of path-integral solutions
to Fokker-Planck equations." Physical Review A, 27(5), 2663-2670.
Wissel, C. (1979). "Manifolds of Equivalent Path Integral Solutions of the Fokker-Planck
Equation." Zeitschrifi fur Physik B, 35, 185-191.
Wolf, A., Swift. J. B., Swinney, H. L. and Vastano, J. (1985). "Determining Lyapunov
Exponents from a Time Series." Physica 16D, 285-317.
180
Yang, C. Y., Cheng, A. and Roy, V. (1990). "Chaotic and Stochastic Dynamics for a
Nonlinear Structure System with Hysteresis and Degradation." International Journal
of Probabilistic Eng. Mech, 6, 193-203.
Yim, C. S., Myrum, M. A., Gottlieb, 0., Lin, H. and Shin, I. (1993).
Summary of
Preliminary Analysis of Nonlinear Oscillations in a Submerged Mooring System
Experiment. Report No. 0E-93-03, Oregon State University.