The theory of the firm: Technology Specification of technology outputs
advertisement

The theory of the firm:
Technology
Lectures in Microeconomic Theory
Fall 2010, Part 2
07.07.2010
G.B. Asheim, ECON4230-35, #2
1
Specification of technology
A firm produces outputs from inputs. We need to
specify what combinations of inputs and outputs
that are technologically feasible.
Good j :
y y oj y ij
j
Net
output
Output
Input
Production plan : y ( y1 , , y j , , yn )
Production (possibilities) set: Y
Negative if
input
Positive if
output
y ( y1 , , y j , , yn ) is feasible if and only if y Y
07.07.2010
2
G.B. Asheim, ECON4230-35, #2
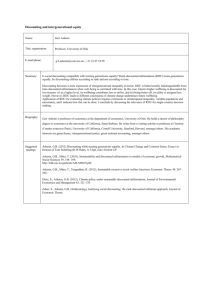
Proporties of production sets
Y is nonempty and closed
Monotonicity: if y Y & y y, then y Y
“No free lunch”
Non-incr RTS
Convex
”Free lunch”
Y is convex
Non-increasing returns to scale
Non-incr RTS
Convex
y2
y2
Y
Y
y1
07.07.2010
G.B. Asheim, ECON4230-35, #2
y1
3
1
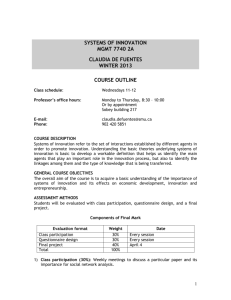
Properties of production sets (cont.)
y2
Not non-incr RTS
Not convex
Y yields
possibility
for inaction
Y
Not non-incr RTS
Convex
No poss for inaction
y2 Not non-incr RTS
Not convex
Poss for inaction
Y
y1
y2
Y
y1
y1
Sunk cost
07.07.2010
4
G.B. Asheim, ECON4230-35, #2
Only one output i.e. : y ( y,x)
Input requirement set: V ( y ) {x | ( y, x) Y }
Isoquant: Q ( y ) {x | x V ( y ) & x V ( y ) for y y}
Analysis with only one output
Production function Illustrations with only two inputs
From input requirement set to production function
From production function to input requirement set
f (x) max{ y | x V ( y )}
V ( y ) {x | f ( x) y}
07.07.2010
5
G.B. Asheim, ECON4230-35, #2
Input requirement set
x2
Monotonicity
Convexity
y 2 further out if
I
Input
vector that
h lleads
d to y 1.
1 decreasing RTS
y 2 if constant RTS
y leads
2 further
in if
Input vector that also
to y 1.
isoquant
07.07.2010
y 1 increasing RTS
x1
G.B. Asheim, ECON4230-35, #2
6
2
Convexity
0 t 1
Y convex : y Y and y Y imply ty (1 t ) y Y
V ( y ) convex : x V ( y ) and x V ( y ) imply
tx (1 t )x V ( y )
f quasi - concave :
f ( x) f ( x) implies
p
f (tx (1 t ) x) f ( x)
A convex production set Y implies that the associated
input requirement set V(y) is convex.
A convex input requirement set V(y) is equivalent to a
quasi-concave prodution function f(x) .
07.07.2010
7
G.B. Asheim, ECON4230-35, #2
The technical rate of substitution
Slope of the isoquant
If x1 is increased with one unit, how much can
x2 be decreased while keeping output constant?
x2
y f ( x1 , x2 )
0 dy
f
x1
dx1 xf2 dx2
x1
TRS
dx2
dx1
07.07.2010
y f ( x1 , x2 )
f
x1
f
x 2
8
G.B. Asheim, ECON4230-35, #2
The elasticity of substitution
Curvature of the isoquant
How easy is it to substitute one input for another?
x2
x1
x2
x1
07.07.2010
( x2 / x1 )
x2 / x1
TRS
TRS
d ln y 1y dyy
y f ( x1 , x2 )
y
x
TRS d x12
x2
dTRS
x1
d ln( x2 / x1 )
d ln TRS
d ln x 1x dx
y f ( x1 , x2 )
d ln y dy x
d ln x dx y
y f ( x1 , x2 )
G.B. Asheim, ECON4230-35, #2
9
3
Returns to scale (RTS)
A technology
exhibits constant RTS if any of the following holds:
y
y Y ty Y , for all t 0
x V ( y ) tx V (ty ), for all t 0
f (tx) tf ( x), for all t 0
x
Y
The production function is homogeneous of degree 1.
A technology exhibits increasing RTS if:
f (tx) tf ( x), for all t 1
A technology exhibits decreasing RTS if:
f (tx) tf ( x), for all t 1
07.07.2010
10
G.B. Asheim, ECON4230-35, #2
Prod. fn.s with constant RTS ― Examples
Cobb-Douglas prod. fn.
f ( x1 , x2 ) x1a x2b , 0 a, b 1, a b 1
What is the TRS?
TRS
f
x1
f
x2
a x2
b x1
b
f
x1
ax1a 1 x2b a
x2 b
x1
f
x2
bx1a x2b 1
x1 a
x2
What is the elasticity of substitution?
x2
x1
d ln( x2 / x1 )
1
d ln TRS
07.07.2010
ba TRS
ln xx12 ln ba ln TRS
11
G.B. Asheim, ECON4230-35, #2
Prod. fn.s with constant RTS ― Examples
Constant-elasticty-of-substitution (CES) prod. fn.
1
1 1
f ( x1 , x2 ) ax1 bx2
, 0, 1
What is the TRS?
TRS
ff
x1
f
x 2
1
ax
2
b x1
1
1
1
1
f
x1
ay 1 x1
f
x 2
by 1 x2
What is the elasticity of substitution?
d ln( x2 / x1 )
d ln TRS
07.07.2010
x2
x1
ba TRS
ln xx12 ln ba ln TRS
G.B. Asheim, ECON4230-35, #2
12
4
Prod. fn.s with constant RTS ― Examples
Leontieff prod. fn.
f ( x1 , x2 ) min ax1 , bx2 , a 0, b 0
What is the TRS?
x2
Not defined
What is the elasticity
of substitution?
x1
0
07.07.2010
G.B. Asheim, ECON4230-35, #2
13
Elasticity of scale
Curvature of production fn. when scale is changed
e( x)
df ( tx )
f ( tx )
dt
t
t 1
df (tx) t
dt f (tx) t 1
Constant RTS at x : e( x) 1
Increasing RTS at x : e(x) 1
Decreasing RTS at x : e(x) 1
07.07.2010
G.B. Asheim, ECON4230-35, #2
14
Homogeneous and homothetic technologies
f(x) is homogeneous of degree k if
f (tx) t k f ( x), for all t 0
f(x) is homothetic if it can be written as f(x) g(h(x)),
where h() is homogeneous of degree 1 and g() is a
monotone function ( z z g ( z ) g ( z ) ).
Examples:
f ( x1 , x2 ) x1a x2b , 0 a, b 1, a b 1
1
07.07.2010
k
1 1
f ( x1 , x2 ) ax1 bx2
, 0, 1, k 1
G.B. Asheim, ECON4230-35, #2
15
5