Edgewise Subdivision and Simple Maps Knut Berg
advertisement

Edgewise Subdivision
and Simple Maps
by
Knut Berg
Thesis for the degree of
Master in Mathematics
(Master of Science)
Department of Mathematics
Faculty of Mathematics and Natural Sciences
University of Oslo
February 2009
2
Dedicated to my father Ole Jørgen Berg
on occasion of his 60th birthday.
3
4
Acknowledgements
I would like to express my gratitude to my supervisor John Rognes for guiding me through this
thesis. It’s been loads of fun.
To the rest of you: I’m in a bit of a hurry. Thank you.
Knut Berg
February 2009
5
6
Contents
1 Introduction
9
2 Simplicial sets
2.1 The category of finite ordinals . .
2.1.1 Face operators . . . . . .
2.1.2 Degeneracy operators . .
2.2 Simplicial sets . . . . . . . . . . .
2.3 Some properties of simplicial sets
2.3.1 Limits and colimits . . . .
2.4 Geometric realization of simplical
3 Simple maps
3.1 Simple maps
. . .
. . .
. . .
. . .
. . .
. . .
sets
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
11
11
12
13
17
21
25
28
35
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4 Desingularization of simplicial sets
37
5 Edgewise subdivision
41
5.1 In the ordinal category . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.2 Segal’s edgewise subdivision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.3 The natural homeomorphism E : |sd(X)| → |X| . . . . . . . . . . . . . . . . . . . 48
'
s
6 The simple map eX : sd(X) −−→
X
6.0.1 Involutive functor revisited . . . . . . .
6.0.2 The natural transformation id =⇒ sd∆ .
6.0.3 The natural transformation e : sd =⇒ id
6.0.4 e : sd(X) X is simple . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
55
55
56
57
58
'
s
7 Classifying natural simple maps sdk (X) −−→
X
61
∆ k
7.1 Natural transformations id =⇒ (sd ) . . . . . . . . . . . . . . . . . . . . . . . . 61
7.2 The natural map e : sd =⇒ id is unique . . . . . . . . . . . . . . . . . . . . . . . 62
's
7.3 Natural simple maps sdk (X) −−→
X, k > 1 . . . . . . . . . . . . . . . . . . . . . . 64
8 An answer to our question
69
A Bökstedt-Hsiang-Madsen’s edgewise subdivision
73
7
8
Chapter 1
Introduction
Using Kan’s normal subdivision, Sd : sSet → sSet, ([FP90, Section 4.6], [WJR08, Section
2.2]) Waldhausen, Jahren and Rognes showed (see [WJR08, Theorem 2.5.2]) that there is an
improvement functor, I : sSet → sSet, which takes a finite simplicial set X onto a non-singular
's
simplicial set I(X) equipped with a natural simple map I(X) −−→
X. The result plays a crucial
role in the proof of the stable parametrized h-cobordism theorem ([WJR08, Theorem 0.1]). The
fact that there is no natural homeomorphism between the geometric realizations |Sd(X)| ∼
= |X|
makes the proof of [WJR08, Theorem 2.5.2] rather technical and troublesome.
In [Seg73] Segal introduced another subdivision functor, sd : sSet → sSet, with the property that |sd(X)| is naturally homeomorphic with |X|. In a similar fashion, Bökstedt, Hsiang
and Madsen defined subdivision functors sdk : sSet → sSet, k ≥ 2, with the same property.
The two constructions are usually referred to as edgewise subdivisions. The subject of this thesis
is the following question:
Can we use Segal’s subdivision to construct an improvement functor? More precisely, if X
is a finite simplicial set, can we find a natural simple map from the desingularization, Dsdk (X),
of sdk (X) to X for some k ∈ N?
The answer to this is our main theorem:
Theorem 1.0.1 ((8.0.6)). Let X be a finite simplicial set and let k be a natural number. Then
's
there exists no natural simple map Dsdk (X) −−→
X.
'
s
X, then
The approach to this is as follows: If there is a natural simple γX : Dsdk (X) −−→
there is a natural map δX = γX ◦ βX , where βX is the canonical desingularization map (4.0.12).
If X is non-singular, βX is an isomorphism and δX is simple. This leads us to the quest of classifying natural simple maps from sdk (X) → X. The role of the standard simplicial-1-simplex
's
is essential here. We prove that there are exactly 2k−1 natural simple maps sdk (∆[1]) −−→
∆[1]
k−1
(7.3.3) and the general case follows from this. In fact, they all come from 2
different natural
transformations in the ordinal category (7.1.3), and they are rather “well-behaved” 1 .
In Chapter 2 we give an introduction to simplicial sets. If the reader is familiar with simplicial sets, (s)he may perfectly skip this chapter. We mainly base ourselves on the book [FP90]
with some inspiration coming from [May92].
1
In the sense that they easily disprove the existence of γX
9
In Chapter 3 we give a brief introduction to simple maps as described in [WJR08]. Unfortunately, we are unable to prove every statement here since some of the machinery required is
beyond the scope of this thesis. The only result we will use from this section is the so-called
“gluing lemma” (3.1.9).
In Chapter 4 we define the desingularization of a simplicial set. This construction is in
general very complicated to calculate, but in our case a very simple example is sufficient to
prove our main theorem (8.0.6).
In Chapter 5 we will define Segal’s edgewise subdivision of a simplicial set and study it with
great detail. For each t ∈ [0, 1] there is a natural continuous map EX,t : |sd(X)| → |X|, and
two such maps are homotopic (5.3.4). Furthermore, if t ∈ (0, 1) the maps are homeomorphisms
(5.3.8).
In Chapter 6 we see that there are natural simplicial maps eX : sd(X) → X and (eX )op =
eX op : sd(X) → X originating from the ordinal category, and E1 = |eX | and E0 = −op ◦ |eX op |
where −op is the natural homeomorphism X op ∼
= X. If X is a finite simplicial set, then eX
op
is a simple map. The fact that sd(X ) = sd(X) will be important, since it gives rise to 2k−1
's
different natural simple maps from sdk (X) −−→
X if X is finite.
In Chapter 7 we start on our “classification quest”. In the ordinal category we will see
that there are only 2k−1 natural transformations id =⇒ sd∆ (7.1.3), and they induce the 2k−1
different natural simple maps we’ve been discussing so far. Next we will see that the natural
's
X is unique. Our main result in this category will be (7.3.3) where we
map eX : sd(X) −−→
's
prove that there are exactly 2k−1 natural simple maps sdk (X) −−→
X, which means that they
all come from the ordinal category.
Our final chapter will provide a counter example to the existence of a natural simple map
from Dsdk (X) 's X for any k.
In Appendix A we briefly define the edgewise subdivision of Bökstedt, Hsiang and Madsen
and outline why it is not suitable to construct an improvement functor.
10
Chapter 2
Simplicial sets
2.1
The category of finite ordinals
Following [FP90, Section 4.1] we introduce the category of finite ordinals. Even though this
category seems rather innocent, we will see that its strict combinatorial structure governs later
constructions. The introduction will therefore be rather thorough and explicit, preparing us for
the road ahead.
Definition 2.1.1. Let ∆ denote the skeleton category of finite non-empty ordinals and weakly
increasing functions. More precisely,
• the objects are finite ordinals [n], n ∈ N0 , which are totally ordered finite sets
[n] = {0 ≤ 1 ≤ . . . ≤ n},
and
• ∆([n], [m]) is the set of order preserving functions α : [n] → [m]. That is, α(k) ≤ α(k + 1)
for all k, k + 1 ∈ [n]. We will refer to these morphisms as operators.
We can regard these finite ordinals and operators in an explicit geometric manner:
Example 2.1.2. An operator α : [n] → [m] gives rise to a linear map Rn+1 → Rm+1 defined
by ek 7→ eα(k) , where {e0 , . . . en } is the standard orthonormal basis for Rn+1 . The restriction
of this linear map to the standard topological n-simplex
∆ = {t = (t0 , . . . , tn ) ∈ R
n
n+1
| 0 ≤ ti ≤ 1 (i = 0, . . . , n),
and
n
X
ti = 1}
i=0
yields a map ∆α : ∆n → ∆m where the j th entry of ∆α (t) is
(∆α (t))j =
X
ti .
α(i)=j
More precisely, we have a functor ∆− : ∆ → Top where
• [n] 7→ ∆n , and
• an operator α : [n] → [m] is mapped to the continuous map ∆α : ∆n → ∆m .
Moreover, this functor is faithful by the definition of ∆α .
11
2.1.1
Face operators
The monomorphisms of the category ∆ are called face operators. They are injective (strictly
increasing) operators µ : [n] [m] (implying n ≤ m).
Example 2.1.3.
1. The identity operators ιn : [n] [n], where k 7→ k.
2. The elementary face operators δin : [n − 1] [n], 0 ≤ i ≤ n, defined by
(
k
if 0 ≤ k ≤ i − 1,
δin (k) =
k + 1 if i ≤ k ≤ n − 1.
3. The vertex operators εni : [0] [n], where 0 7→ i and 0 ≤ i ≤ n.
If no confusion arises, we will usually skip the superscript n and just write ι, δi and εi .
Lemma 2.1.4. The elementary face operators satisfy the relation
δj ◦ δi = δi ◦ δj−1
if i < j.
δj
δ
i
→
[n − 1] −→ [n], where 0 ≤ i < j ≤ n, is defined by
Proof. Let n ≥ 2. The composite [n − 2] −
(
δj (k)
if 0 ≤ k ≤ i − 1,
(δj ◦ δi )(k) =
δj (k + 1) if i ≤ k ≤ n − 2
k
if 0 ≤ k ≤ j − 1, 0 ≤ k ≤ i − 1,
k + 1 if j ≤ k ≤ n − 1, 0 ≤ k ≤ i − 1,
=
k + 1 if 0 ≤ k + 1 ≤ j − 1, i ≤ k ≤ n − 2,
k + 2 if j ≤ k + 1 ≤ n − 1, i ≤ k ≤ n − 2
if 0 ≤ k ≤ i − 1,
k
= k + 1 if i ≤ k ≤ j − 2,
k + 2 if j − 1 ≤ k ≤ n − 2.
δ
δj−1
i
Similarly, the composite [n − 2] −
→
[n − 1] −−−→ [n] is defined by
(
δi (k)
if 0 ≤ k ≤ j − 2,
(δi ◦ δj−1 )(k) =
δi (k + 1) if j − 1 ≤ k ≤ n − 2
k
if 0 ≤ k ≤ i − 1, 0 ≤ k ≤ j − 2,
k + 1 if i ≤ k ≤ n − 1, 0 ≤ k ≤ j − 2,
=
k + 1 if 0 ≤ k + 1 ≤ i − 1, j − 1 ≤ k ≤ n − 2,
k + 2 if i ≤ k + 1 ≤ n − 1, j − 1 ≤ k ≤ n − 2
if 0 ≤ k ≤ i − 1,
k
= k + 1 if i ≤ k ≤ j − 2,
k + 2 if j − 1 ≤ k ≤ n − 2.
Hence, δj ◦ δi = δi ◦ δj−1 if i < j.
12
Corollary 2.1.5. Every face operator µ : [n] [m] has a unique decomposition of the form
µ = δir ◦ δir−1 ◦ · · · ◦ δi1
where r ∈ N0 , and 0 ≤ i1 < i2 < . . . < ir ≤ m are the elements of [m] that are not in the image
of µ. If r = 0, µ is the identity operator ιn : [n] → [n].
Proof. Any strictly increasing µ : [n] [m] (n ≤ m) is determined by its image, or equivalently
by the elements that are not in the image. Ordering the elements of [m] that are not in the
image by 0 ≤ i1 < i2 < . . . < ir ≤ m and by using (2.1.4), the result follows.
Example 2.1.6. The vertex operator εi : [0] [n] has the unique decomposition
εi = δn ◦ δn−1 ◦ · · · ◦ δi+1 ◦ δbi ◦ δi−1 ◦ · · · δ0 ,
where we omit the δi from the composition.
2.1.2
Degeneracy operators
The epimorphisms of the category ∆ are called degeneracy operators. They are surjective
operators ρ : [n] [m], (implying n ≥ m).
Example 2.1.7.
1. The identity operators ιn : [n] [n], k 7→ k.
2. The elementary degeneracy operators σjn : [n + 1] [n], 0 ≤ j ≤ n, defined by
σjn (k)
(
k
if 0 ≤ k ≤ j,
=
k − 1 if j + 1 ≤ k ≤ n + 1.
3. The terminal operators ω n : [n] [0], k 7→ 0.
Again, if no confusion occurs, we will skip the superscript n.
Lemma 2.1.8. The elementary degeneracy operators satisfy the relation
σi ◦ σj = σj−1 ◦ σi
if i < j.
σj
σ
i
Proof. Let n ∈ N0 . The composite [n + 2] −→
[n + 1] −→ [n], 0 ≤ i < j ≤ n, is defined by
(
σi (k)
if 0 ≤ k ≤ j,
(σi ◦ σj )(k) =
σi (k − 1) if j + 1 ≤ k ≤ n + 2
k
if 0 ≤ k ≤ i, 0 ≤ k ≤ j,
k − 1 if i + 1 ≤ k ≤ n + 1, 0 ≤ k ≤ j,
=
k − 1 if 0 ≤ k − 1 ≤ i, j + 1 ≤ k ≤ n + 2,
k − 2 if i + 1 ≤ k − 1 ≤ n + 1, j + 1 ≤ k ≤ n + 2
if 0 ≤ k ≤ i,
k
= k − 1 if i + 1 ≤ k ≤ j,
k − 2 if j + 1 ≤ k ≤ n + 2.
13
σj−1
Similarly, the composite [n + 2] −−−→ [n + 1] ◦ σi : [n + 2] [n] is defined by
(
σj−1 (k)
if 0 ≤ k ≤ i,
(σj−1 ◦ σi )(k) =
σj−1 (k − 1) if i + 1 ≤ k ≤ n + 2
k
if 0 ≤ k ≤ j − 1, 0 ≤ k ≤ i,
k − 1 if j ≤ k ≤ n + 1, 0 ≤ k ≤ i,
=
k − 1 if 0 ≤ k − 1 ≤ j − 1, i + 1 ≤ k ≤ n + 2,
k − 2 if j ≤ k − 1 ≤ n + 1, i + 1 ≤ k ≤ n + 2
if 0 ≤ k ≤ i,
k
= k − 1 if i + 1 ≤ k ≤ j,
k − 2 if j + 1 ≤ k ≤ n + 2.
Thus, σi ◦ σj = σj−1 ◦ σi .
Lemma 2.1.9. Every degeneracy operator ρ : [n] [m] has a unique decomposition of the
form
ρ = σj1 ◦ · · · ◦ σjs
where s ∈ N0 , 0 ≤ j1 < . . . < js < n are the elements of [n] that have the same image as their
successors under the operator ρ. In the case of s = 0, ρ is the identity operator ιn : [n] → [n].
Proof. Any degeneracy operator ρ : [n] [m] is determined by the j ∈ [n] which have the same
image as their successors. Ordering these j by 0 ≤ j1 < j2 < · · · < js and by using (2.1.8) the
result follows.
Definition 2.1.10 (Maximal sections). Let ρ : [n] [m] (n ≥ m) be some degeneracy operator.
We denote by ρb : [m] [n] the maximal section of ρ. More precisely, it is the face operator
defined by
ρb(k) = max ρ−1 (k).
Obviously, ρ ◦ ρb = ι.
Lemma 2.1.11 ([FP90, Lemma 4.1.3]). Any degeneracy operator is uniquely determined by
its set of sections.
Proof. Let ρ, τ : [n] [m] be two degeneracy operators with the same set of sections. Then,
the maximal sections this set with respect to ρ and τ are the same, ρb = τb : [m] [n]. We
reconstruct ρ from ρb by defining
0 if 0 ≤ k ≤ ρb(0)
1 if ρb(0) < k ≤ ρb(1)
ρ(k) = .
..
m if ρb(n − 1) < k ≤ ρb(n).
Doing the same for τ , we see that ρ = τ .
Lemma 2.1.12. The composition of elementary face and degeneracy operators satisfy the
relations
σj ◦ δi = δi ◦ σj−1
if i < j,
σj ◦ δi = δi−1 ◦ σj
if i > j + 1.
σj ◦ δi = ι
if j ≤ i ≤ j + 1,
14
and
Proof.
δ
σj
i
1. Let n ≥ 2. The composite [n − 1] −
→
[n] −→ [n − 1], 0 ≤ i < j ≤ n − 1, is defined by
(
σj (k)
(σj ◦ δi )(k) =
σj (k + 1)
k
if
k − 1 if
=
k + 1 if
k
if
if
k
= k + 1 if
k
if
if
if
0 ≤ k ≤ i − 1,
i≤k ≤n−1
0 ≤ k ≤ j, 0 ≤ k ≤ i − 1,
j + 1 ≤ k ≤ n, 0 ≤ k ≤ i − 1,
0 ≤ k + 1 ≤ j, i ≤ k ≤ n − 1,
j + 1 ≤ k + 1 ≤ n, i ≤ k ≤ n − 1
0 ≤ k ≤ i − 1,
i ≤ k ≤ j − 1,
j ≤ k ≤ n − 1.
σj−1
δ
i
Similarly, the composite [n − 1] −−−→ [n − 2] −
→
[n − 1] is defined by
(
δi (k)
(δi ◦ σj−1 )(k) =
δi (k − 1)
if
k
k + 1 if
=
k − 1 if
k
if
if
k
= k + 1 if
k
if
if 0 ≤ k ≤ j − 1,
if j ≤ k ≤ n − 1
0 ≤ k ≤ i − 1, 0 ≤ k ≤ j − 1,
i ≤ k ≤ n − 2, 0 ≤ k ≤ j − 1,
0 ≤ k − 1 ≤ i − 1, j ≤ k ≤ n − 1,
i ≤ k − 1 ≤ n − 2, j ≤ k ≤ n − 1
0 ≤ k ≤ i − 1,
i ≤ k ≤ j − 1,
j ≤ k ≤ n − 1.
Hence, σj ◦ δi = δi ◦ σj−1 if i < j.
δ
σj
i
→
[n] −→ [n − 1], 0 ≤ j ≤ i ≤ j + 1 ≤ n, is defined by
2. Let n ≥ 1. The composite [n − 1] −
(
σj (k)
if 0 ≤ k ≤ i − 1,
(σj ◦ δi )(k) =
σj (k + 1) if i ≤ k ≤ n − 1
if 0 ≤ k ≤ j, 0 ≤ k ≤ i − 1,
k
k − 1 if j + 1 ≤ k ≤ n, 0 ≤ k ≤ i − 1,
=
k + 1 if 0 ≤ k + 1 ≤ j, i ≤ k ≤ n − 1,
k
if j + 1 ≤ k + 1 ≤ n, i ≤ k ≤ n − 1
(
k if 0 ≤ k ≤ j, 0 ≤ k ≤ i − 1,
=
k if j + 1 ≤ k + 1 ≤ n, i ≤ k ≤ n − 1
= k.
Hence, σj ◦ δi = ι if j ≤ i ≤ j + 1.
15
δ
σj
i
3. Let n ≥ 1. The composite [n − 1] −
→
[n] −→ [n − 1], 0 ≤ j + 1 < i ≤ n, is defined by
(
σj (k)
(σj ◦ δi )(k) =
σj (k + 1)
k
if
k − 1 if
=
k + 1 if
k
if
if
k
= k − 1 if
k
if
if
if
0 ≤ k ≤ i − 1,
i≤k ≤n−1
0 ≤ k ≤ j, 0 ≤ k ≤ i − 1,
j + 1 ≤ k ≤ n, 0 ≤ k ≤ i − 1,
0 ≤ k + 1 ≤ j, i ≤ k ≤ n − 1,
j + 1 ≤ k + 1 ≤ n, i ≤ k ≤ n − 1
0 ≤ k ≤ j,
j + 1 ≤ k ≤ i − 1,
i ≤ k ≤ n − 1.
σj
δi−1
Similarly, the composite [n − 1] −→ [n − 2] −−→ [n − 1] (assuming n ≥ 2) is defined by
(
δi−1 (k)
if 0 ≤ k ≤ j,
(δi−1 ◦ σj )(k) =
δi−1 (k − 1) if j + 1 ≤ k ≤ n − 1
if 0 ≤ k ≤ i − 2, 0 ≤ k ≤ j,
k
k + 1 if i − 1 ≤ k ≤ n − 2, 0 ≤ k ≤ j,
=
k − 1 if 0 ≤ k − 1 ≤ i − 2, j + 1 ≤ k ≤ n − 1,
k
if i − 1 ≤ k − 1 ≤ n − 2, j + 1 ≤ k ≤ n − 1
if 0 ≤ k ≤ j,
k
= k − 1 if j + 1 ≤ k ≤ i − 1,
k
if i ≤ k ≤ n − 1.
Combining (2.1.12), (2.1.8) and 2.1.12), we obtain the so-called cosimplicial identities:
Corollary 2.1.13. [The cosimplicial identities] Composition of elementary face and degeneracy
operators is subject to the rules
δj ◦ δi = δi ◦ δj−1
if i < j,
σj ◦ δi = ι
if j ≤ i ≤ j + 1,
σj ◦ σi = σi ◦ σj+1
if i ≤ j.
σj ◦ δi = δi ◦ σj−1
if i < j,
σj ◦ δi = δi−1 ◦ σj
if i > j + 1,
and
Lemma 2.1.14. Any operator α : [n] → [m] has a unique decomposition
α = δir ◦ · · · ◦ δi1 ◦ σj1 ◦ · · · ◦ σjs
where r, s ∈ N0 , n − r + s = m, 0 ≤ i1 < . . . < ir ≤ m and 0 ≤ j1 < . . . < js < n.
Proof. This follows from (2.1.5), (2.1.9) and (2.1.13).
16
2.2
Simplicial sets
Definition 2.2.1 (Simplicial objects and cosimplicial objects). Let C be any category. The
o
category of simplicial objects in C , denoted sC , is the functor category C ∆ . More precisely,
• the objects are covariant functors ∆o → C (= contravariant functors ∆ → C ), and
• sC (X, Y ) is the set of all natural transformations X =⇒ Y .
The category of cosimplicial objects in C , denoted cC , is the functor category C ∆ . That is,
• the objects are covariant functors ∆ → C , and
• cC (A, B) is the set of all natural transformations A =⇒ B.
Example 2.2.2. The functor ∆− : ∆ → Top as described in (2.1.2) is a cosimplicial space
in the category cTop. The elementary operators δi : [n − 1] → [n] and σj : [n + 1] → [n] are
mapped to the maps ∆δi = δ i : ∆n−1 ∆n and ∆σj = σ j : ∆n+1 ∆n defined by
δ i (t0 , . . . , tn−1 ) = (t0 , . . . , ti−1 , 0, ti , . . . tn−1 ),
and
σ (u0 , . . . , un+1 ) = (u0 , . . . , uj−1 , uj + uj+1 , uj+2 , . . . , un+1 ),
j
where t = (t0 , . . . , tn−1 ) ∈ ∆n−1 and u = (u0 , . . . , un+1 ) ∈ ∆n+1 .
Example 2.2.3 (Simplicial sets). The category of simplicial sets, sSet, is described by the
following:
• An object X, called a simplicial set, is a functor X : ∆o`→ Set, [n] 7→ X([n]) = Xn ,
where Xn ∩ Xm = ∅ ⇐⇒ n 6= m. The disjoint union n∈N0 Xn , also denoted X, is
equipped with so-called simplicial structure maps
X ((δi )o ) = dX
i : Xn → Xn−1 ,
X ((σj ) ) =
o
sX
j
and
: Xn → Xn+1 ,
where 0 ≤ i, j ≤ n. We will refer to these maps as the face and degeneracy maps,
respectively, of the simplicial set X. If no ambiguity arises, we will skip the superscript
X and just write di and sj .
• sSet(X, Y ) is the set of natural transformations X =⇒ Y , called simplicial maps. More
explicitly, a simplicial map f : X → Y is a collection of functions fn : Xn → Yn , n ∈ N0 ,
that commute with the simplicial structure maps in the following manner:
Xn
fn
dX
i
Yn
/ Xn−1
dY
i
Xn
fn−1
fn
/ Yn−1
sX
j
Yn
/ Xn+1
sY
j
fn+1
/ Yn+1 .
We will refer to elements x ∈ Xn as n-simplices and we will write dim x = n for the dimension
or degree of x. Simplices of dimension 0 are called vertices.
For each operator α : [n] → [m] we obtain a function α∗ = X(α) : Xm → Xn . A pair (x, α)
of a simplex x ∈ X and an operator α is said to be composable if α is an operator with codomain
[dim(x)] (= α∗ (x) is defined). Note that (α ◦ β)∗ = β ∗ ◦ α∗ by contravariance of X.
The monomorphisms (resp. epimorphisms) are injective (resp. surjective) simplicial maps
f : X → Y , meaning that each fn : Xn → Yn is injective (resp. surjective). If f is a
monomorphism, we will refer to it as a cofibration.
17
Lemma 2.2.4 (Simplicial identities). Let X be any simplicial set. The face and degeneracy
maps of X satisfy the simplicial identities,
di ◦ dj = dj−1 ◦ di
if i < j,
di ◦ sj = id
if j ≤ i ≤ j + 1,
di ◦ sj = sj−1 ◦ di
if i < j,
di ◦ sj = sj ◦ di−1
if i ≥ j + 1,
si ◦ sj = sj+1 ◦ si
and
if i ≤ j.
Proof. This is a consequence of the cosimplicial identites (2.1.13) and contravariance of the
functor X.
Definition 2.2.5. Let X be a simplicial set and let x ∈ Xn+1 a (n + 1)-simplex, n ∈ N0 . We
say that x is a degenerate simplex if
x = si (x0 )
for some n-simplex x0 ∈ Xn and some 0 ≤ i ≤ n. We say that x is a non-degenerate simplex
if it is not degenerate. We will let Xn] denote the set of non-degenerate n-simplices and let X ]
be set of all non-degenerate simplices. Obviously, every 0-simplex is non-degenerate. Note that
cofibrations preserve non-degeneracy of simplices.
Theorem 2.2.6 (Eilenberg-Zilber lemma. [EZ50, (8.3), p. 508], or [FP90, Theorem 4.2.3]). A
simplex x of a simplical set X has a unique decomposition of the form
x = ρ∗ (x] )
where x] is a non-degenerate simplex and ρ : [dim(x)] [dim(x] )] is a degeneracy operator.
Proof. Since the degree of x is bounded below, we always have a representation of this form.
To establish uniqueness, assume that
x = ρ∗ (y) = τ ∗ (z)
where (y, ρ) and (z, τ ) are composable pairs of non-degenerate simplices and degeneracy operators. Let µ be a section of ρ. Then,
y = µ∗ (τ ∗ (z)) = (τ ◦ µ)∗ (z).
Since y is non-degenerate, the operator τ ◦µ is a face operator. This means that dim(y) ≤ dim(z),
and by redoing this argument with a section of τ , we see that dim(y) = dim(z). This in turn
implies that τ ◦ µ is a face operator with the same domain and codomain, meaning it is an
identity operator, and
x = (τ ◦ µ)∗ (y) = ι∗ (y) = y.
Furthermore, τ ◦ µ = ι implies that every section of ρ is a section of τ . By symmetry, we also
get the other inclusion of sections. This means that τ and ρ have the same set of sections. By
(2.1.11), this means that ρ = τ .
Example 2.2.7 (Simplicial standard-p-simplex). The simplicial standard-p-simplex, denoted
∆[p], is the contravariant hom-functor ∆(−, [p]) : ∆ → Set. More precisely,
• ∆[p]n = ∆([n], [p]), the set of operators [n] → [p], and
18
• the simplicial structure maps
di : ∆[p]n ∆[p]n−1 ,
and
sj : ∆[p]n ∆[p]n+1
are defined by
di (α) = α ◦ δi ,
and
sj (β) = β ◦ σj .
Lemma 2.2.8. The non-degenerate simplices of the simplicial standard-p-simplex ∆[p] are the
face operators with codomain [p].
Proof. This statement is equivalent to saying that a simplex is degenerate if and only if it is a
non-injective operator.
If α : [n] → [p] is a degenerate simplex there exists an α0 : [n − 1] → [p] such that α =
sj (α0 ) = α0 ◦ σj for some 0 ≤ j ≤ n. This means that
α(j) = α0 ◦ σj (j) = α0 ◦ σj (j + 1) = α(j + 1),
so α is not injective.
Conversely, if α : [n] → [p] is a non-injective operator there exists 0 ≤ j < n such that
α(j) = α(j + 1). Then there exists an operator α0 : [n − 1] → [p] such that α = sj (α0 ) = α0 ◦ σ j .
More precisely,
α0 (k) = (dj ◦ sj )(α0 (k))
= dj (α(k))
= (α ◦ δj )(k)
(
α(k)
if
=
α(k + 1) if
0 ≤ k ≤ j − 1,
j ≤ k ≤ n − 1.
Notation 2.2.9. For “reasonably small” n and p there is an easy way of representing elements
of the set ∆[p]n = ∆([n], [p]):
If x : [n] → [p] is an operator, we can write x as [x(0), x(1), ..., x(n)], where
x(i) = (ε∗i (x))(0) = (x ◦ εi )(0)
are the vertices of the simplex x. If we precompose with an elementary face operator, we see
that the composition
δ
x
i
[n − 1] −
→
[n] −
→ [p]
is the operator represented by [x(0), ..., x(i-1), x(i+1), ..., x(n)]. Similarly, the
composition
σj
x
[n + 1] −→ [n] −
→ [p]
is represented by [x(0), ..., x(j-1), x(j), x(j), ..., x(n)]. We will only use this notation in easy examples due to obvious aesthetic reasons.
19
Notation 2.2.10. Let X be any simplicial set and let x ∈ X be an n-simplex. The ith vertex
of x, 0 ≤ i ≤ n, will be denoted by x(i) . More precisely,
x(i) = ε∗i (x) = (d0 ◦ d1 ◦ · · · ◦ di−1 ◦ dbi ◦ di+1 ◦ · · · ◦ dn )(x),
where the di is omitted.
Example 2.2.11 (Simplicial standard-2-simplex). To describe the non-degenerate simplices of
∆[2] and how they fit together, we only need to find its non-degenerate simplices. Using the
results above, we see that the non-degenerate simplices are
[0], [1], [2], [0,1], [0,2], [1,2], and [0,1,2].
Their behaviour under the face maps are described by the following two tables:
[0,1]
[0,2]
[1,2]
d0
[1]
[2]
[2]
d1
[0]
[0]
[1],
and
[0,1,2]
d0
[1,2]
d1
[0,2]
d2
[0,1].
Putting all this to together, we see that the non-degenerate part ∆[2] can be represented by the
diagram
[1]
? ???
??
??
??
??
??
??
??
??
??
[0, 1]
[0]
[0, 1, 2]
[0, 2]
[1,2]
?
??
??
??
??
??
??
??
??
??
??
/ [2].
Example 2.2.12 (Singular functor. [FP90, Page 156]). [ Let T be any topological space. For
every n ∈ N0 let Sn (T ) be the set of singular n-simplices of T (continuous maps f : ∆n → T ).
The collection of all Sn (T ) form a simplicial set S(T ) by defining di : Sn (T ) → Sn−1 (T ) and
sj : Sn (T ) → Sn+1 (T ) as follows:
di (f )(t) = f (δ i (t)) = f (t0 , . . . , ti−1 , 0, ti , . . . , tn−1 ),
and
sj (f )(u) = f (σ (u)) = f (u0 , . . . , ui−1 , ui + ui+1 , ui+1 , . . . , un+1 ),
j
where f ∈ Sn (T ), t = (t0 , . . . tn−1 ) ∈ ∆n−1 , u = (u0 , . . . , un+1 ) ∈ ∆n−1 , and δ i and σ j are as
described in (2.2.2). If f : T → U is a continuous map of topological spaces we have a simplicial
map S(f ) : S(T ) → S(U ) defined by
S(f )(x) = f ◦ x,
which means that we have a functor S : Top → sSet. We call this the singular functor and
S(X) is the singular set of X.
20
2.3
Some properties of simplicial sets
Definition 2.3.1 (Simplicial subsets). Let X be some simplicial set. A subset Y ⊂ X is said
to be a simplicial subset if it is closed under the simplicial structure maps, meaning that for
each n ∈ N0 then
y ∈ Yn = Y ∩ Xn ⇒ di (y), si (y) ∈ Y
for each
0 ≤ i ≤ n.
This implies that the inclusion of Y in X is a simplicial map, Y X.
Definition 2.3.2 (Closure). Let x be a simplex in a simplicial set X. We denote by clX (x),
the closure of x in X, the simplicial subset of X generated by x,
clX (x) = {α∗ (x) ∈ X | α : [n] → [dim(x)],
n ∈ N0 }.
It is the smallest simplicial subset of X containing the simplex x.
More generally, for any
X
subset Y ⊂ X, let cl (Y ), the closure of Y in X, be the simplicial subset of X generated by Y ,
clX (Y ) = {α∗ (y) ∈ X | α : [n] → [dim(y)],
y ∈ Y,
n ∈ N0 }.
It is the smallest simplicial subset of X containing Y . If no ambiguity arises, we will skip the
superscript X and just write cl.
Example 2.3.3. Let x ∈ ∆[p] be a non-degenerate n-simplex (n ≤ p). Then, cl(x) ∼
= ∆[n] by
the correspondence
α∗ (x)7→α
cl(x) o
β ∗ (x)←[β
/ ∆[n].
Example 2.3.4 (n-skeleton). The n-skeleton skn (X), n ∈ N0 , is the simplicial subset of X
generated by all simplices of degree at most n,
!
n
a
skn (X) = cl
Xi .
i=0
Moreover, we have a contravariant functor sk− (X) : ∆ → sSet where
• [n] 7→ skn (X), and
• any operator α : [n] → [m] is mapped to the simplicial map
x7→α∗ (x)
skm (X) −−−−−→ skn (X),
which commutes with the inclusions of skn (X) and skm (X) into X,
skm (X)
x7→α∗ (x)
H# H
HH
H
incl. HHH
#
X.
/ skn (X)
w{
ww
w
ww
w{ w incl.
This means that X can be written as the colimit
X∼
= colim skn (X) =
[n]∈∆
[
n≥0
21
skn (X).
Notation 2.3.5. We denote by ∂∆[p] the (p − 1)-skeleton skp−1 (∆[p]) and refer to it as the
boundary of ∆[p].
Definition 2.3.6. Let ∆− : ∆ → sSet denote the functor where
• [p] 7→ ∆[p], the standard simplicial-p-simplex, and
• if α : [p] → [q] is any operator, let ∆α : ∆[p] → ∆[q] be the simplicial map defined by
∆α(γ) = α ◦ γ,
where γ : [n] → [p] is any simplex in ∆[p]. This is a simplicial map since
∆α(di (γ)) = α ◦ γ ◦ δi = ∆α(γ) ◦ δi = di (∆α),
and
∆α(sj (γ)) = α ◦ γ ◦ σj = ∆α(γ) ◦ σj = sj (∆α).
Lemma 2.3.7. The functor ∆− : ∆ → sSet is fully faithful.
Proof. Let α : [p] → [q] be any operator in ∆. The simplicial map ∆α : ∆[p] → ∆[q] is defined
by its image of ιp ,
∆α(ιp ) = α ◦ ιp = α : [p] → [q].
Conversely, any f : ∆[p] → ∆[q] is uniquely determined by its value of ιp ,
f (ιp ) : [p] → [q].
Putting this together,
ιp 7→f (ιp )
{α : [p] → [q]}
{f : ∆[p] −−−−−−→ ∆[q]}
_
_
ιp 7→ιp ◦α=α
{f (ιp ) : [p] → [q]}
{∆α : ∆[p] −−−−−−−→ ∆[q]}
_
_
{α : [p] → [q]}
{∆f (ιp )
ιp 7→f (ιp )◦ιp =f (ιp )
= f : ∆[p] −−−−−−−−−−−−→ ∆[q]}.
Lemma 2.3.8 (Yoneda lemma. [FP90, Lemma 4.2.1, p. 141]). Let X be a simplicial set. For
each q ∈ N0 there is a bijection
natural in ∆[q] and X.
ϕqX = ϕX : sSet(∆[q], X) → Xq ,
f 7→ f (ιq ),
Proof. We define the inverse ψX : Xq → sSet(∆[q], X) by letting ψX (x) : ∆[q] → X be the
simplicial map
ψX (x)(γ) = γ ∗ (x),
where γ : [p] → [q] is any simplex in ∆[q]. Then,
{f : ∆[q] → X}
sSet(∆[q], X)
ϕX
_
f (ιq )
Xq
ψX
sSet(∆[q], X)
ϕX
_
ψX
{ψX (f (ιq )) : ∆[q] → X},
22
where ψX (f (ιq )) : ∆[q] → X is the map γ 7→ γ ∗ f (ιq ) = f (γ). The other way,
Xq
ψX
x
_
ψX
sSet(∆[q], X)
γ7→γ ∗ (x)
{ψX (x) : ∆[q] −−−−−→ X}
_
ϕX
ϕX
ψX (x)(ιq ) = x ◦ ιq = x.
Xq
To see that ϕ is natural in X, let g : X → Y be a simplicial map. Then, we have the commutative
diagram
ϕX
sSet(∆[q], X)
g∗
sSet(∆[q], Y )
ϕY
{h : ∆[q] → X} / Xq
gq
g∗
ϕX
_
/ h(ιq )
_
{g ◦ h : ∆[q] → Y } / Yq
ϕY
gq
/ (g ◦ h)(ιq ).
As for naturality in ∆[q], let α : [q] → [p] be any operator in ∆ and remember that the functor
∆− : ∆ → sSet is fully faithful. Then we have a commutative diagram
sSet(∆[q], X)
ϕqX
O
(∆α)∗
/ Xq
O
α∗
sSet(∆[p], X)
ϕpX
/ Xp
where
{f ◦ ∆α : ∆[q] → X} ϕqX
O
(∆α)∗
/ (f ◦ ∆α)(ιq )
_
α∗ (f (ιp ))
O
{f : ∆[p] → X} {f : ∆[p] → X}
_
ϕpX
α∗
/ f (ιp ).
To see that this is the same, note that in X
α∗ f (ιp ) = f (α∗ (ιp )) = f (ιp ◦ α) = f (α),
and
(f ◦ ∆α)(ι ) = f (∆α(ι )) = f (α ◦ ι ) = f (α).
q
q
q
Definition 2.3.9. Let X be a simplicial set. For any n-simplex x ∈ Xn , let x denote the
representing map of x. It is the uniquely corresponding simplicial map
x : ∆[n] → X,
ιn 7→ x,
in sSet(∆[n], X).
Definition 2.3.10. Let simp(X) denote the simplex category of a simplicial set X. It is the
category where
23
• the objects are the simplices x ∈ X, and
• the morphisms from x to y are the operators α : [dim(x)] → [dim(y)] such that α∗ (y) = x
in X.
If f : X → Y is a simplicial map we have an induced functor simp(f ) : simp(X) → simp(Y )
which takes x to f (x), so
simp(−) : sSet → Cat,
X 7→ simp(X)
is a functor.
Furthermore, for each simplicial set X we have a functor ∆[dim(−)] : simp(X) → sSet
where
• x 7→ ∆[dim(x)], and
• a morphism α : [dim(x)] → [dim(y)] from x to y is mapped to the simplicial map ∆α :
∆[dim(x)] → ∆[dim(y)].
Lemma 2.3.11 ([FP90, Lemma 4.2.1]). Let X be a simplicial set. Then, the colimit of
∆[dim(−)] : simp(X) → sSet is X. More precisely,
X∼
=
colim ∆[dim(x)].
x∈simp(X)
Proof. If α : [dim(x)] → [dim(y)] is a morphism from x to y in simp(X) we have a commutative
diagram
∆α
∆[dim(x)]
JJ
JJ
JJ
J
x JJJ
$
X,
/ ∆[dim(y)]
t
tt
tt
t
tt y
tz t
where
x(ιdim(x) ) = x
= α∗ (y)
= α∗ (y(ιdim(y) ))
= y(α)
= y(∆α(ιdim(x) )).
This means that X is a co-cone of ∆[dim(−)] : simp(X) → sSet. To see that it is universal, let
Y be a simplicial set with maps f : ∆[dim(x)] → Y and g : ∆[dim(y)] → Y where f = g ◦ ∆α.
Let u : X → Y to be the unique simplicial map defined by
u(x) = f (ιdim(x) ) = g(∆α(ιdim(x) ) = g(y(α)).
Then, the diagram
∆[dim(x)]
∆α
JJ
JJ
JJ
J
x JJJ
$
f
X
u
& x
Y
commutes and X is a universal co-cone.
24
/ ∆[dim(y)]
t
tt
tt
t
tt y
tz t
g
2.3.1
Limits and colimits
Limits and colimits in sSet can be computed degreewise (see [ML98, V.3] for details). Since
Set is complete and cocomplete ([ML98, Theorem 1, p. 110], we can conclude that sSet is also
complete and cocomplete. More precisely, if I is a small category and i 7→ X(i) is a functor
I → sSet, then in degree n ∈ N0 ,
Xn ∼
= colim X(i)n ,
i∈I
and
Xn0 ∼
= lim X(i)n ,
i∈I
where Xn and Xn0 are the n-simplices of the simplicial sets
X∼
= colim X(i),
i∈I
and
X0 ∼
= lim X(i).
i∈I
Definition 2.3.12 (Product). Let X and Y be simplicial sets. We define the product of X and
Y to be the simplicial set X × Y described by
• (X × Y )n = Xn × Yn , the product of Xn and Yn in Set, and
• the structure maps
diX×Y : (X × Y )n → (X × Y )n−1 ,
sjX×Y
: (X × Y )n → (X × Y )n+1 ,
Y
(x, y) 7→ (dX
i (x), di (y)),
(x, y) 7→
and
Y
(sX
j (x), sj (y)).
Note that we have simplicial projection maps
pr1 : X × Y X,
pr2 : X × Y Y,
(x, y) 7→ x,
and
(x, y) 7→ y.
Example 2.3.13. The product ∆[1] × ∆[1] is represented by the diagram
([1],[0])
/ ([1],[1])
O
m6
m
mm
m
m
m
mmm
mmm
m
m
mmm
mmm
m
m
m
mmm
mmm
m
m
mm
([1,1],[0,1])
O
([0,1,1],[0,0,1])
([0,1],[0,1])
m
mmm
m
m
m
m
m
mmm
mmm
m
m
m
([0,0,1],[0,1,1])
mmm
mmm
m
m
mm
mmm
mmm
([0,1],[0,0])
([0],[0])
([0,0],[0,1])
([0,1], [1,1])
/ ([0],[1]).
Definition 2.3.14 (Coproduct/disjoint union). Let
` X and Y be simplicial set. We define the
coproduct of X and Y to be the disjoint union X Y equipped with simplicial injection maps
a
i1 : X X
Y, x 7→ x, and
a
i2 : Y X
Y, y 7→ y.
`
More precisely, X Y is the simplicial set defined by
25
• (X
`
Y )n = Xn
`
Yn , the coproduct (= disjoint union) of Xn and Yn in Set, and
• the structure maps
X
‘
X
‘
di
sj
Y
: (X
Y
: (X
defined by
a
a
Y )n → (X
Y )n → (X
a
a
Y )n−1 ,
Y )n+1
(
dX
i (z) if z ∈ Xn ,
(z) =
dYi (z) if z ∈ Yn ,
(
‘
sX
X Y
j (z) if z ∈ Xn ,
sj
(z) =
sYj (z) if z ∈ Yn .
X
di
‘
and
Y
and
Definition 2.3.15 (Pushouts).
Let f : Z → X and g : Z → Y be simplicial maps. We define
`
the simplicial set X Z Y to be the pushout
g
Z
/Y
f
ei2
X
where
X
a
Y =X
Z
equipped with the simplicial maps
/X
ei1
`
Z
a .
Y f (z) ∼ g(z)
eii : X → X
ei2 : Y → X
a
Y,
Z
a
Y
for all
and
x 7→ x
e,
y 7→ ye,
Y,
Z
z ∈ Z,
`
where
e and ye denote the equivalence classes of x and y (in X Y ) under ∼. More precisely,
` x
X Z Y is the simplicial set defined by
`
`
` .
• (X Z Y )n = Xn Zn Yn = Xn Yn fn (z) ∼ gn (z) for all z ∈ Zq is the pushout
Zn
gn
/ Yn
fn
(ei2 )n
Xn
(ei1 )n
in Set, and
26
/ Xn
`
Zn
Yn
• the structure maps
X
di
‘
X
‘
Z
Y
:
X
a
Y
Z
sj
Z
Y
:
X
a
Z
Y
!
!n
n
→
X
a
Y
Z
→
!
,
Z
!n−1
(w),
and
X
a
Y
and
,
n+1
are defined by
X
‘
X
‘
di
sj
Z
Z
Y
Y
‘
X^
Y
(w)
e = di
‘
X^
Y
(w)
e = sj
(w),
where w is any representative of the equivalence class w.
e
Definition 2.3.16 (Coequalizer). Let f, g : X → Y .be two simplicial maps. We define the
coequalizer of f and g to be the simplicial set Z = Y ∼ where ∼ is the smallest equivalence
relation such that f (x) ∼ g(x) for are x ∈ X. More precisely, Z is the simplicial set defined by
.
• Zn = Yn 'n is the coequalizer of fn , gn : Xn → Yn , where 'n is the smallest equivalence
relations such that fn (x) ∼n gn (x) for each x ∈ Xn , and
• the simplicial structure maps
dZ
i : Zn → Zn−1 ,
and
sZ
j : Zn → Zn+1
are defined by
Y (y),
dZ
y ) = d^
i (e
i
and
Y (y)
dZ
y ) = d^
j (e
i
where y ∈ Yn is any representative of the equivalence class ye ∈ Zn .
Example 2.3.17. Let X be any simplicial set and consider the commutative diagram
`
∂∆x [n]
x∈Xn]
‘
x
x∂∆x [n]
/ skn−1 (X)
incl.
`
x∈Xn]
∆x [n]
‘
x
x
/ skn (X).
where x : ∆x [n] = ∆[n] → skn (X) is the representing map of x. We claim that skn (X) is a
pushout:
Let Y be a simplicial set with simplicial maps
a
a
f=
fx :
∆x [n] → Y, and g : skn−1 (X) → Y
x
x∈Xn]
27
such that the diagram
`
/ skn−1 (X)
∂∆x [n]
x∈Xn]
g
`
x∈Xn]
∆x [n]
/Y
f
commutes. Let u : skn (X) → Y be the unique map defined by
(
g(z)
if z ∈ skn−1 (X),
u(z) =
n
fz (ι ) if z ∈ Xn] .
Then, the following diagram commutes and the claim is confirmed:
`
‘
∂∆x [n]
x∈Xn]
x
x∂∆x [n]
/ skn−1 (X)
incl.
`
x∈Xn]
g
∆x [n]
‘
x
/ skn (X)
E
x
E
E
E u
E
f
E
E
E
E" 0 Y.
Definition 2.3.18 (Simplicial p-sphere. [FP90, Example 4, p. 145]). The simplicial p-sphere
is the pushout
∂∆[p] /
incl.
/ ∆[p]
/ S[p].
∆[0]
The simplicial p-sphere contains exactly 2 non-degenerate simplices, one in dimension 0 and
one in dimension p (S[0] has two in dimension 0).
2.4
Geometric realization of simplical sets
Definition
2.4.1 (Geometric realization). Let X be a simplical set and consider the topological
`
n
space n∈N0 Xn × ∆n where we give
` each Xn then discrete topology, each Xn × ∆ the product
topology and the disjoint union n∈N0 Xn × ∆ the disjoint union topology. We define the
geometric realization of X to be the quotient space
G
Xn × ∆n (α∗ (x), t) ∼ (x, αt)
|X| =
n∈N0
28
for every x ∈ Xn , t ∈ ∆p and operator α : [p] → [n]. We let [x, t] denote the equivalence class
of a pair (x, t) ∈ Xq × ∆q .
If f : X → Y is a simplicial map, the geometric realization of f is the well-defined map
|f | : |X| → |Y |,
[x, t] 7→ [f (x), t].
Thus, the geometric realization is a functor
| − | : sSet → Top.
A point [x, t] ∈ |X| is said to be non-degenerate if x is a non-degenerate simplex and t an
interior point.
Example 2.4.2 (Standard simplical-p-simplex). The geometric realization of the standard
simplicial-p-simplex ∆[p] is naturally homeomorphic to the standard topological-p-simplex ∆p :
Any point [α, t] ∈ |∆[p]| with a representative (α, t) ∈ ∆[p]n × ∆n can be written
[α, t] = [α∗ (ιp ), t] = [ιp , ∆α (t)]
since ιp generates ∆[p]. We define ϕ : |∆[p]| → ∆p by
[α, t] 7→ ∆α (t) ∈ ∆p ,
with inverse ψ : ∆p → |∆[p]| defined by
t 7→ [ιp , t]
Furthermore, the geometric realization of the simplicial inclusion ∂∆[p] ∆[p] is the inclusion
of the boundary ∂|∆[p]| into |∆[p]|.
Proposition 2.4.3. Let X be a simplicial set. The topology on the geometric realization |X|
is the final topology ([FP90, p. 246]) given by the set of geometric realizations of representing
maps
{|x| : |∆[dim(x)]| → |X| | x ∈ X},
meaning that U ⊂ |X| is open (resp. closed) if and only if |x|−1 (U ) ⊂ |∆[dim(x)]| is open (resp.
closed) for each x ∈ X.
Proof. By definition of |X| and the quotient topology we know that
`
• U ⊂ |X| is open (resp. closed) if and only if q −1 (U ) ⊂ n∈N0 Xn × ∆n is open (resp.
closed),
`
`
where q = n∈N0 qn : n∈N0 Xn × ∆n → |X| is the quotient map. By the definition of the
disjoint union topology, this means that
• U is open (resp. closed) if and only if qn−1 (U ) ⊂ Xn × ∆n is closed for each n ∈ N0 .
Since every Xn has the discrete topology, this in turn means that
−1 (U ) is open (resp. closed) for each x ∈ X
• U is open (resp. closed) if and only if qn,x
∼
=
where qn,x = q {x}×∆n . Now, by the homeomorphism ϕ : |∆[n]| −
→ ∆n described above, this
means that we can identify qn,x with the map |x| (up to natural homeomorphism), hence
29
• U ⊂ |X| is open (resp. closed) if and only if |x|−1 (U ) is open (resp. closed) for each
x ∈ X.
Proposition 2.4.4 ([May92, Lemma 14.2]). Let X be a simplicial set. Each point in the
geometric realization |X| has a unique non-degenerate representative.
Proof. Let (x, t) ∈ Xn × ∆n . By the Eilenberg-Zilber lemma (2.2.6), x ∈ Xn can uniquely be
written as
x = (sj1 ◦ · · · ◦ sjs )x] ,
where x] ∈ Xn−s is non-degenerate and 0 ≤ j1 < · · · < js < n. Similarly, t ∈ ∆n can uniquely
be written as
t = (δ ir ◦ · · · ◦ δ i1 )(t] )
where t ∈ ∆n−r is an interior point. By combining these two facts, we see that
[x, t] = [x, (δ ir ◦ · · · ◦ δ i1 )(t] )]
(t ∈ int(∆n−r ))
= [(di1 ◦ · · · ◦ dir )(x), t] ]
= [x0 , t] ]
x0 , t] ∈ Xn−r × ∆n−r
]
(x0] ∈ Xn−r−s
)
= [(sj1 ◦ · · · ◦ sjs )(x0] ), t] ]
= [x0] , (σ js ◦ · · · ◦ σ j1 )(t] )]
= [x0] , t0] ].
Since all the σ j : ∆n → ∆n−1 map interior points to interior points, we can conclude that
(x0] , t0] ) ∈ Xn−r−s × ∆n−r−s is non-degenerate.
Lemma 2.4.5 ([FP90, Lemma 4.3.4]). Let Y be a simplicial subset of a simplicial set X. Then
the geometric realization of Y is a closed subspace of the geometric realization of X.
`
Proof. We need to see that q −1 (|Y |) is closed in n∈N0 Xn × ∆n .
A point [x, t] ∈ |X| is`in |Y | if and only if its non-degenerate representative is in some
n . Each Y ⊂ X is closed (discrete topology), hence
Yn × ∆n , thus q −1 (|Y |) = n∈N0 Yn × ∆`
n
n
`
n
n
each Yn × ∆ is closed in Xn × ∆ and n∈N0 Yn × ∆n is closed in n∈N0 Xn × ∆n .
Theorem 2.4.6 ([May92, Theorem 16.1]). The geometric realization functor | − | : sSet →
Top is the left adjoint of the singular functor S : Top → sSet (2.2.12).
Proof. For each simplicial set X we define ηX : X → S(|X|) which takes an n-simplex x ∈ Xn
to the singular simplex
ηX (x) : ∆n → |X|, t 7→ [x, t].
Using this, we obtain a natural transformation η : idsSet =⇒ S ◦ | − |, the unit. More precisely,
if f : X → X 0 is a simplicial map, we have a commutative diagram
X
ηX
f
S(|X|)
/ X0
ηX 0
/ S(|X 0 |),
S(|f |)
30
where
x
f
/ f (x)
_
x
_
ηX 0
ηX
ηX (X) ηX 0 (f (x)) = {t 7→ [f (x), t]}
S(|f |)
/ (S(|f |) ◦ ηX ) (x) = {t 7→ [x, t] 7→ [f (x), t]}.
For each topological space T we define εT : |S(T )| → T by
εT ([x, t]) = x(t)
for every singular simplex x : ∆n → T and every point t ∈ ∆n . These components constitute
a natural transformation ε : | − | ◦ S =⇒ idTop , the counit. More precisely, if g : T → U is a
continuous map of topological spaces, we have a commutative diagram
|S(g)|
|S(T )|
/ |S(U )|
ε|S(T )|
ε|S(U )|
T
/U
g
where
[x, t] |S(g)|
/ [S(g)(x), t] = [g ◦ x, t]
_
[x, t]
_
ε|S(U )|
ε|S(T )|
x(t) (g ◦ x)(t)
g
/ (g ◦ x)(t).
We need to verify that the counit-unit relations ([ML98, IV.1]) are satisfied,
idS(T ) = S(εT ) ◦ ηS(T ) ,
and
id|X| = ε|X| ◦ |ηX |.
For the first one, let x : ∆n → T be a n-simplex in S(T ). The simplicial map ηS(T ) maps x to the
n-simplex f : ∆n → |S(T )|, t 7→ [x, t]. Applying S(εT ) to this we get the simplex εT ◦ f which
takes a t to [x, t] and then x(t), which means that εT ◦ f = x. Hence, idS(T ) = S(εT ) ◦ ηS(T ) .
S(T )
ηS(T )
x : ∆q_ → T
S(|S(T )|)
S(εT )
ηS(T )
f = {t 7→ [x, t]}
_
S(T )
S(εT )
{εT ◦ f : t 7→ [x, t] 7→ x(t)} = x.
For the second relation, let [x, t] be a point in |X|. The map |ηX | maps this to the point [g, t],
where g ∈ S(|X|) is the simplex which takes u to [x, u]. Applying ε|X| to g we get g(t) = [x, t].
Hence, id|X| = ε|X| ◦ |ηX |.
[x, t]
|X|
|ηX |
|S(|X|)|
ε|X|
|X|
_
|ηX |
[g = {u 7→ [x, u]}, t]
_
ε|X|
g(t) = [x, t].
31
This means that the geometric realization is a left adjoint of the singular functor.
Corollary 2.4.7. The geometric realization | − | : sSet → Top preserves all colimits.
Corollary 2.4.8. Let X be a simplicial set. Then, |X| can be written as the colimit
[
|skn (X)|
|X| ∼
= colim |skn (X)| =
[n]∈∆
n≥0
of closed subspaces
|sk0 (X)| ⊂ |sk1 (X)| ⊂ · · · ⊂ |X|.
Theorem 2.4.9 ([FP90, Theorem 4.3.5]). Let X be a simplicial set. Then the geometric
realization |X| is a CW-complex with one q-cell for each non-degenerate q-simplex of X.
Proof. The attaching maps of the CW-structure on |X| are the geometric realizations of the
representing maps x : ∆[dim(x)] → X where x ∈ X ] ,
|x| : |∆[dim(x)]| → |X|
That is, the open cells ex of |X| are
ex = |x|(int(|∆[x]|))
and |X| =
S
(x ∈ X ] )
= {[x, t] | t ∈ int(∆dim(x) )}
∼
= int(∆dim(x) ),
x∈X ] ex .
To see that |X| is CW-complex, note that:
1. By (2.4.8) we can write |X| as the filtration of closed subspaces
|sk0 (X)| ⊂ |sk1 (X)| ⊂ · · · ⊂ |X|,
where |sk0 (X)| ∼
= X0 × ∆0 is a discrete space.
2. In (2.3.17) we saw that skn (X) could be obtained from skn−1 as a pushout by attaching
the non-degenerate n-simplices. Passing to the geometric realization, we see that |skn (X)|
is obtained from |skn−1 (X)| by attaching the n-cells:
`
x∈Xn]
|∂∆x [n]|
‘
x
|x||∂∆x [n]|
/ |skn−1 (X)|
incl.
`
x∈Xn]
|∆x [n]|
‘
x
|x|
/ |skn (X)|.
3. Let f : |X| → T be a function to any topological space T such that the restriction of f to
each |skn (X)| is a continuous map. We need to verify that f : |X| → T is continuous. By
the final topology on |X|, f is continuous if and only if each f ◦ |x| is continuous for each
x ∈ X. For each x ∈ Xn the image of |x| is contained in |skn (X)|, so f ◦ |x| is continuous
for each x ∈ X.
32
Theorem 2.4.10. Let X and Y be simplicial sets. The continuous map
η = |pr1 | × |pr2 | : |X × Y | → |X| × |Y |
is a bijection. Moreover, if |X| × |Y | is a CW-complex, then η is a homeomorphism.
Proof. See [May92, Theorem 14.3] or [FP90, Prop. 4.3.15].
Remark 2.4.11. The space |X| × |Y | is a CW-complex if X and Y are countable or if either
|X| or |Y | is locally finite (every point is an inner point of a finite sub-CW-complex). If the
product is formed in the category of compactly generated Hausdorff spaces, meaning it is the
Kelley space product, then |X| × |Y | is a CW complex. We will therefore always regard | − |
as a functor into CGHaus. For an introduction to compactly generated Hausdorff spaces and
the properties we just described, see [Ste67] or [Hat02, Appendix].
33
34
Chapter 3
Simple maps
3.1
Simple maps
Definition 3.1.1. A simplicial set X is said to be finite if it is generated by finitely many
simplices. Equivalently, its set of non-degenerate simplices X ] is finite.
Example 3.1.2. Obviously, the stanard simplicial-p-simplex ∆[p] is finite for each p ∈ N0 .
Lemma 3.1.3. A simplicial set X is finite if and only if its geometric realization |X| is a
compact space.
Proof. The geometric realization of X has exactly one cell for each non-degenerate simplex in X,
and a CW-complex is compact if and only if it has finitely many cells ([FP90, Prop. 1.5.8]).
Definition 3.1.4. Let X and Y be finite simplicial sets. A simplicial map f : X → Y is said
to be simple if its geometric realization |f | : |X| → |Y | has contractible fibers. More precisely,
for each point P ∈ |Y |, the inverse image |f |−1 (P ) is a contractible topological space. We will
's
Y.
usually denote a simple map by X −−→
Example 3.1.5. If X and Y are finite simplicia sets where |X| is contractible, then the projection pr2 : X × Y → Y is simple since |pr2 |(P ) ∼
= |X| × {P } ' ∗ for any point P ∈ |Y |.
Proposition 3.1.6 ([WJR08, Prop. 2.1.2]). Let X and Y be finite simplicial sets and let
f : X → Y be a simplicial map. Then f is simple if and only if its geometric realization
|f | : |X| → |Y | is a hereditary weak homotopy equivalence. That is, for each open subset
U ⊂ |Y | the restriction |f | |f |−1 (U ) is a weak homotopy equivalence.
Proof. This is a consequence of the proposition stated below. We will not prove it here since it
relies heavily on machinery outside the scope of this thesis.
Proposition 3.1.7 ([WJR08, Prop. 2.1.2]). Let f : X → Y be a simplicial map of finite
simplicial sets. Then the following statements are equivalent:
1. f is a simple map.
2. For each point P ∈ |Y |, the inverse image |f |−1 (P ) has the Čech homotopy type of a
point.
3. |f | is a cell-like mapping.
4. |f | is a hereditary proper homotopy equivalence.
35
5. |f | is a hereditary homotopy equivalence.
6. |f | is a hereditary weak homotopy equivalence.
Proof. We refer the reader to [WJR08, Section 2.1] for the proof and definitions of the terms in
this proposition.
Proposition 3.1.8 ([WJR08, Prop 2.1.3]). Let X, Y and Z be finite simplicial sets and let
f : X → Y and g : Y → Z be simplical maps. Then,
1. If f and g are simple then the composite g ◦ f is simple.
2. If f and g ◦ f are simple then g is simple.
3. Pullbacks of simple maps are simple.
Proof. Again, we refer the reader to [WJR08, Section 2.1].
Lemma 3.1.9 (The gluing lemma. [WJR08, Prop. 2.1.3]). Consider the following commutative
diagram of simplicial maps of finite simplicial sets,
X1 o
o X0
's
Y1 o
/ X2
's
o Y0
's
/ Y2 .
If X0 X1 and Y0 Y1 are cofibrations, and Xi Yi are simple, i = 0, 1, 2, then the induced
map of pushouts
a
a
's
X1
X2 −−→
Y1
Y2
X0
Y0
is simple.
Proof. See [WJR08, Section 2.1].
36
Chapter 4
Desingularization of simplicial sets
Following [WJR08] we define the desingularization of a simplicial set. For general simplicial
sets X, calculating its desingularization is a futile task, but the few examples we provide will
come in handy later on.
Definition 4.0.10. Let X be any simplicial set. We say that a non-degenerate n-simplex x ∈ X
is non-singular if the representing map x : ∆[n] → X is a cofibration. Equivalently, x is nonsingular if all its vertices x(i) are distinct. Passing to geometric realization, this is equivalent to
saying that |x| is an embedding. If this is not the case, we say that the simplex x is singular.
The simplicial set X is said to be non-singular if every x ∈ X ] is non-singular. If this is not
the case, we say that X is singular.
Example 4.0.11.
1. Obviously, the standard simplicial n-simplex ∆[n] is non-singular.
2. The simplicial-n-sphere S[n], n ≥ 0, is singular since it has only one vertex and one
non-degenerate simplex in dimension n.
3. Simplicial subsets and products of non-singular simplicial sets are non-singular.
4. If X and Y are non-singular simplicial
sets, and f : Z X and g : Z `
Y are
`
cofibrations, then the pushout X Z Y is non-singular since any simplex in X Z Y can
be regarded as a simplex in X or Y ,
Z /
g
/Y
f
X /
/X
`
Z
Y.
Definition 4.0.12 (Desingularization, [WJR08, Remark 2.2.12]). Let D : sSet → sSet denote
the desingularization functor where:
• DX is the non-singular simplicial set defined as the image of the simplicial map
Y
X→
Y, x →
7 ((f (x))f ,
f :XY
where f ranges over all quotient maps from X onto non-singular simplicial sets Y .
37
• If g : X → X 0 is a simplicial map, let
Y
Dg = im X →
Y → DX 0 = im X 0 →
f :XY
where Dg((f (x))f ) = (f 0 (g(x))f 0 .
Y
f 0 :X 0 Y 0
Y 0
We denote by βX : X → DX the simplicial map x 7→ (f (x))f , and we will refer to it as the
desingularization map.
Lemma 4.0.13. If X is a non-singular set, then βX : X → DX is an isomorphism with inverse
−1
βX
: DX → X defined by
(f (x))f 7→ x.
Proof. This is obvious since X itself is a non-singular quotient of X, meaning that βX is injective.
Lemma 4.0.14. Let X be a simplicial set. The non-singular simplicial set DX is universal in
the sense that if f : X → Y is a surjective simplicial map onto a non-singular Y , there exists a
unique f : DX → Y such that the diagram
f
X
βX
|
|
|
|
|
|
|
/Y
|>
f
DX
commutes.
Proof. We define f as the composite βY−1 ◦ Df .
f
X
{
βX
{ {
DX
{
{
{ f
Df
{
{
/Y
{= O
βY−1
/ DY.
Lemma 4.0.15. The collection of components {βX | X ∈ sSet} define a natural transformation
β : id =⇒ D
in the category of simplicial sets.
Proof. Consider the diagram
X
f
βX
/Y
βY
DX
Df
38
/ DY.
where
DX = im X →
Y
g:XY
DY = im Y →
Y ,
Y
h:Y Z
Let x ∈ X, then
x
x
_
and
Z
!
f
.
/ f (x)
_
βY
βX
(g(x))g Df
/ (h(f (x))h
(h(f (x)))h
Example 4.0.16. The desingularization of the simplicial-p-sphere, S[p], is isomorphic to ∆[0].
Example 4.0.17. Consider the quotient X = ∆[2] cl([0,1]). It is the simplicial set with two
vertices v0 and v1 , two non-degenerate 1-simplices e0 , e1 , and one non-degenerate 2-simplex c,
connected in the following manner:
X]
e0
e1
c
d0
v1
v1
e0
d1
v0
v1
e1
d2
s0 (v0 ).
We see that the only way to make this non-singular is to identify e0 and e1 ,
DX ∼
= X e0 ∼ e1 ∼
= ∆[1].
Example 4.0.18. Consider the quotient X = ∆[2] cl([1,2]). It is the simplicial set with two
vertices v0 and v1 , two non-degenerate 1-simplices e0 , e1 , and one non-degenerate 2-simplex c,
connected in the following manner:
X]
e0
e1
c
d0
v1
v1
s0 (v1 )
d1
v0
v1
e1
d2
e0 .
As before, the only way to make this non-singular is to identify e0 and e1 ,
DX ∼
= X e0 ∼ e1 ∼
= ∆[1].
Example 4.0.19. Consider the quotient X = ∆[2] cl([0, 2]). It is the simplicial set with two
vertices v0 and v1 , two non-degenerate 1-simplices e0 , e1 , and one non-degenerate 2-simplex c,
connected in the following manner:
X]
e0
e1
c
d0
v1
v0
e1
d1
v0
v1
s0 (e0 )
39
d2
e0 .
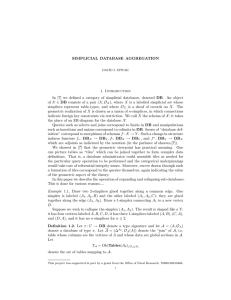
This time, the only way to make this non-singular is to “mod out” with all of X,
DX ∼
=X X∼
= ∆[0].
∆[2] cl([0,2])
40
s0 (v0 )
v0
c
e0
v1
e1
v0
c
e0
∆[2] cl([1,2])
∆[2] cl([0,1])
s0 (v0 )
v0
e1
e1
v1
D
s0 (v1 )
e0 ∼ e1
D
e0 ∼ e1
c
e0
v1
D
∆[0]
∆[1]
∆[1]
The previous three examples can be summarized by the following picture:
Chapter 5
Edgewise subdivision
In [Seg73] introduced a subdivision functor sd (denoted T in the original article) with the
property that |sd(X)| is naturally homeomorphic to |X| for any simplicial set X. Since this is
our main object of study, we will provide a thorough introduction.
5.1
In the ordinal category
Definition 5.1.1 (Involutive functor of ordinal numbers. [WJR08, Def. 2.2.18]). Let −op :
∆ → ∆ denote the involutive functor which reverses the ordering of an ordinal number. More
precisely,
• [n]op = [n], and
• if α : [n] → [m] is an operator, let αop : [n]op → [m]op be defined by
αop (k) = m − α(n − k).
Lemma 5.1.2. The involutive functor maps the elementary operators
δi : [n − 1] [n],
and σj : [n + 1] [n]
to the elementary operators
δiop = δn−i : [n − 1] [n],
and σjop = σn−j : [n + 1] [n],
respectively.
Proof. The operator δiop : [n − 1] [n] is defined by
δiop = n − δi (n − 1 − k)
(
n−n+1+k
if 0 ≤ n − 1 − k ≤ i − 1,
=
n − n + 1 + k − 1 if i ≤ n − 1 − k ≤ n − 1
(
k
if 0 ≤ k ≤ n − i − 1,
=
k + 1 if n − i ≤ k ≤ n − 1
= δn−i (k).
41
Similarly, the operator σjop : [n + 1] [n] is defined by
σjop (k) = n − σj (n + 1 − k)
(
n−n−1+k
if 0 ≤ n + 1 − k ≤ j,
=
n − n − 1 + k + 1 if j + 1 ≤ n + 1 − k ≤ n + 1
(
k
if 0 ≤ k ≤ n − j,
=
k − 1 if n − j + 1 ≤ k ≤ n + 1
= σn−j (k).
Definition 5.1.3 (Concatenation of ordinal numbers). Let − t − : ∆ × ∆ → ∆ denote the
bifunctor which concatenates ordinal numbers. That is,
• ([n], [m]) 7→ [n] t [m] = {0, 1, . . . , n, n + 1, . . . , n + m + 1} = [n + m + 1], and
{z
}
| {z } |
[n]
[m]
• for a pair of operators (α, β) : ([n1 ], [n2 ]) → ([m1 ], [m2 ]), where α : [n1 ] → [m1 ] and
β : [n2 ] → [m2 ], let α t β : [n1 ] t [n2 ] → [m1 ] t [m2 ] denote the operator defined by
(
α(k)
if 0 ≤ k ≤ n1 ,
(α t β)(k) =
β(k − n1 − 1) + m1 + 1 if n1 + 1 ≤ k ≤ n1 + n2 + 1.
Definition 5.1.4. Let sd∆ : ∆ → ∆ denote the composite
−op ×id∆
∆
[n] −op×id∆
/∆×∆
−t−
/ ∆,
/ ([n]op , [n]) −t−
/ [n]op t [n].
More precisely, sd∆ : ∆ → ∆ is the functor described by
• sd∆ ([n]) = [n]op t [n] = [2n + 1], and
• if α : [n] → [m] is an operator, let sd∆ (α) = αop t α : [2n + 1] → [2m + 1] be the operator
defined by
(
αop (k)
if 0 ≤ k ≤ n,
∆
sd (α)(k) =
α(k − n − 1) + m + 1 if n + 1 ≤ k ≤ 2n + 1
(
m − α(n − k)
if 0 ≤ k ≤ n,
=
α(k − n − 1) + m + 1 if n + 1 ≤ k ≤ 2n + 1.
Lemma 5.1.5. The functor sd∆ maps the elementary operators
δi : [n − 1] [n]
and σj : [n + 1] [n]
to the operators
sd∆ (δi ) = δn+1+i ◦ δn−i : [2n − 1] [2n + 1]
sd (σj ) = σn+1+j ◦ σn−j : [2n + 3] [2n + 1],
∆
respectively.
42
and
Proof. The operator sd∆ (δi ) : [2n − 1] [2n + 1] is defined by
(
δiop (k)
if 0 ≤ k ≤ n − 1,
sd∆ (δi )(k) =
δi (k − (n − 1) − 1) + n + 1 if n ≤ k ≤ 2n − 1,
if 0 ≤ k ≤ n − i − 1,
k
k + 1 if n − i ≤ k ≤ n − 1,
=
k + 1 if 0 ≤ k − n ≤ i − 1, n ≤ k ≤ 2n − 1,
k + 2 if i ≤ k − n ≤ n − 1, n ≤ k ≤ 2n − 1,
if 0 ≤ k ≤ n − i − 1,
k
= k + 1 if n − i ≤ k ≤ n + i − 1,
k + 2 if n + i ≤ k ≤ 2n − 1,
= δn+1+i ◦ δn−i (k).
Similarly, the operator sd∆ (σj ) : [2n + 3] [2n + 1] is defined by
(
σjop (k)
if 0 ≤ k ≤ n + 1,
sd (σj )(k) =
σj (k − (n + 1) − 1) + n + 1 if n + 2 ≤ k ≤ 2n + 3,
k
if 0 ≤ k ≤ n − j,
k − 1 if n − j + 1 ≤ k ≤ n + 1,
=
k − 1 if 0 ≤ k − n − 2 ≤ j, n + 2 ≤ k ≤ 2n + 3,
k − 2 if j + 1 ≤ k − n − 2 ≤ n + 1, n + 2 ≤ k ≤ 2n + 3,
if 0 ≤ k ≤ n − j,
k
= k − 1 if n − j + 1 ≤ k ≤ n + j + 2,
k − 2 if n + j + 3 ≤ k ≤ 2n + 3,
∆
= σn+1+j ◦ σn−j (k).
Lemma 5.1.6. The functors −op and sd∆ satisfy the equality
−op ◦ sd∆ = sd∆ .
Proof. On objects this is trivial. Consider the elementary face and degeneracy operators
δi : [n − 1] → [n] and σj : [n + 1] → [n]. Then,
{σj : [n + 1] [n]}
{δi : [n − 1] [n]}
_
_
∆
{σn+1+j ◦ σn−j : [2n + 3] [2n + 1]}}
{δn+1+i ◦ δn−i : [2n − 1] [2n + 1]}
_
sd∆
sd
_
−op
−op
op
op
{σn+1+j
◦ σn−j
: [2n + 3] [2n + 1]}
op
op
{δn+1+i
◦ δn−i
: [2n − 1] [2n + 1]}
43
and
op
op
δn+1+j
◦ δn+i
= δ2n+1−(n+1+i) ◦ δ2n−(n−i)
= δn−i ◦ δn+i
op
σn+1+j
◦
= δn+1+i ◦ δn−i ,
op
σn−j
and
= σ2n+1−(n+1+j) ◦ σ2n+2−(n−j)
= σn−j ◦ σn+j
= σn+1+j ◦ σn−j .
Since the elementary face and degeneracy operators generate the all the operators in ∆ the
result follows.
Note that sd∆ ◦ −op 6= sd∆ since
{σj : [n + 1] [n]}
{δi : [n − 1] [n]}
_
_
−op
−op
{σn−j : [n + 1] [n]}
{δn−i : [n − 1] [n]}
_
_
∆
sd
{σj ◦ σ2n+2−j : [2n + 3] [2n + 1]}.
{δi ◦ δ2n−i : [2n − 1] [2n + 1]}
Corollary 5.1.7. The functor sd∆
2
sd∆
= sd∆ ◦ sd∆ : ∆ → ∆ is the functor defined by
• [n] 7→ ([n]op t [n]) t ([n]op t [n]), and
• if α : [n] → [m] is an operator, then α is mapped to (αop t α) t (αop t α).
k
This gives us an easy way of describing sd∆ : ∆ → ∆ since just we just “copy the operator
and shift it to the right”:
k
• sd∆ ([n]) = [2k (n + 1) − 1].
• sd∆
k
sd∆
(δi ) : [2k n − 1] [2k (n + 1) − 1] is the composite
k
(δi ) = δ(2k −1)(n+1)+i ◦ δ(2k −1)(n+1)−1−i ◦ · · · ◦ δ3n+3+i ◦ δ3n+2−i ◦ δn+1+i ◦ δn−i .
• Similarly, sd∆
sd∆
5.2
k
k
(σj ) : [2k (n + 2) − 1] [2k (n + 1) − 1] is the composite
(σj ) = σ(2k −1)(n+1)+j ◦ σ(2k −1)(n+1)−1−j ◦ · · · ◦ σ3n+3+j ◦ σ3n+2−j ◦ σn+1+j ◦ σn−j .
Segal’s edgewise subdivision
Definition 5.2.1 (Segal’s subdivision of a simplicial set). Let sd : sSet → sSet denote the
functor defined by the following data:
• sd(X) = X ◦ (sd∆ )o : ∆o → sSet for any simplicial set X. That is, sd(X) is the simplicial
set with sd(X)n = X2n+1 equipped with structure maps
sd(di ) = dn−i ◦ dn+1+i : sd(X)n = X2n+1 → sd(X)n−1 = X2n−1 ,
sd(sj ) = sn−j ◦ sn+1+j : sd(X)n = X2n+1 → sd(X)n+1 = X2n+3 .
44
and
• If f : X → Y is a simplicial map, let sd(f ) : sd(X) → sd(Y ) be the simplicial map defined
by
sd(f )n = f2n+1 : sd(X)n = X2n+1 → sd(Y )n = Y2n+1 .
We will refer to this functor as Segal’s edgewise subdivision or just Segal subdivision.
Example 5.2.2. More generally, sdk (X) is the simplicial set where
• sdk (X)n = X2k (n+1)−1 , and
• the structure maps
– sdk (di ) : sdk (X)n → sdk (X)n−1 , and
– sdk (sj ) : sdk (X)n → sdk (X)n+1
are the composites
– sdk (di ) = dn−i ◦ dn+1+i ◦ d3n+2−i ◦ d3n+3+i ◦ · · · ◦ d(2k −1)(n+1)−1−i ◦ d(2k −1)(n+1)+i , and
– sdk (sj ) = sn−j ◦ sn+1+j ◦ s3n+2−j ◦ s3n+3+j ◦ · · · ◦ s(2k −1)(n+1)−1−j ◦ s(2k −1)(n+1)+j
in X.
Lemma 5.2.3. Segal’s edgewise subdivision preserves
• cofibrations,
• epimorphisms,
• limits and colimits of simplicial sets.
Proof.
• Since f : X → Y is a cofibration (resp. epimorphism) if and only if fn : Xn → Yn is injective (resp. surjective) for each p ∈ N0 , we see that every sd(f )n = f2n+1 is injective (resp.
surjective) if and only if sd(f ) : sd(X) → sd(Y ) is a cofibration (resp. epimorphism).
• This follows from the fact that limits and colimits can be computed levelwise. If
Y = lim Y (j)
and X = colim X(i),
j∈J
i∈I
then for each n ∈ N0 we have that
sd(Y )n = Y2n+1 = lim Y (j)2n+1 = lim sd(Y (j))n ,
j∈J
jJ
sd(X)n = X2n+1 = colim X(i)2n+1 = colim sd(X(i))n .
i∈I
iI
Hence, sd(Y ) = limj∈J sd(Y (i)) and sd(X) = colimi∈I sd(X(i)).
Example 5.2.4. Consider an n-simplex x of sd(∆[p]), n ∈ N. If x is degenerate in sd(∆[p])
then x = sd(sj )(x0 ) for some x0 ∈ sd(∆[p])n−1 . In ∆[p] this means that x = (sn−1−j ◦sn+j )(x0 ) ∈
∆[p]2n−1 . This gives a criterion for x : [2n + 1] → [p] being degenerate in sd(∆[p]):
45
• x ∈ sd(∆[p])n is degenerate if x(n − 1 − j) = x(n − j) and x(n + 1 + j) = x(n + 2 + j) for
some 0 ≤ j ≤ n − 1.
As an example, consider the simplicial set sd(∆[2]). The 2-simplex [0,1,1,1,1,2] ∈ sd(∆[2])
is degenerate, while [0,1,2,2,2,2] is non-degenerate.
Lemma 5.2.5. If X is a non-singular simplicial set, so is sd(X).
Proof. We start with the standard simplicial-p-simplex ∆[p], p ∈ N. Let x ∈ sd(∆[p]) be an
n-simplex,
x = [x(0),..., x(n), x(n+1), ..., x(2n+1)].
If x(i) = x(j) for some 0 ≤ i ≤ j ≤ n, then
sd(ε∗i )(x) = x(i) = [x(n-i), x(n+1+i)] = [x(n-j),x(n+1+j)] = x(j) = sd(ε∗j )(x).
This implies that
x(n−j) = x(n−j +1) = · · · = x(n−i)
and x(n+1+i) = x(n+1+i+1) = · · · = x(n+1+j),
hence x is degenerate. Thus, the simplices in sd(∆[p]) with repeated vertices are degenerate.
Let X be a non-singular simplicial set and assume dim(X) ≥ p for some p ∈ N0 . Consider
the pushout diagram (same diagram as in (2.3.17))
`
∂∆x [p] /
x∈Xp]
`
/ skp−1 (X)
x∈Xp]
/ skp (X),
∆x [p] /
where each morphism is a cofibration since X is non-singular. Since sd preserves colimits
and cofibrations we can by induction conclude that sd(skp (X)) is non-singular (sd(sk0 (X)) is
obviously non-singular),
`
x∈Xp]
`
sd(∂∆x [p]) /
/ sd(skp−1 (X))
x∈Xp]
/ sd(skp (X)).
sd(∆x [p]) /
And finally, if x ∈ sd(X)n = X2n+1 is non-degenerate it is non-singular since sd(sk2n+1 (X))n =
sk2n+1 (X)2n+1 = X2n+1 .
Example 5.2.6. The two non-degenerate 1-simplices of sd(∆[1]) are [0,0,0,1] and [0,1,1,1].
They connect the 0-simplices in the following manner
[0,0,0,1]
[0,1,1,1]
sd(d0 ) = d1 ◦ d2
[0,1]
[0,1]
46
sd(d1 ) = d0 ◦ d3
[0,0]
[1,1].
Putting this together we get the following diagram representing sd(∆[1]),
[0,0]
[0,0,0,1]
/ [0,1] o [0,1,1,1]
[1,1].
Example 5.2.7. Consider the simplicial set sd(∆[2]). The non-degenerate 1-simplices and their
vertices are described by
sd(d0 ) = d1 ◦ d2
[0,1]
[0,2]
[0,2]
[0,1]
[0,2]
[0,2]
[0,2]
[1,2]
[1,2]
[0,0,0,1]
[0,0,0,2]
[0,0,1,2]
[0,1,1,1]
[0,1,1,2]
[0,1,2,2]
[0,2,2,2]
[1,1,1,2]
[1,2,2,2]
sd(d1 ) = d1 ◦ d2
[0,0]
[0,0]
[0,1]
[1,1]
[1,1]
[1,2]
[2,2]
[1,1]
[2,2].
The four non-degenerate 2-simplices and their edges are
a
b
c
d
=
=
=
=
[0,0,0,0,1,2]
[0,0,1,1,1,2]
[0,1,1,1,2,2]
[0,1,2,2,2,2]
sd(d0 ) = d2 ◦ d3
[0,0,1,2]
[0,0,1,2]
[0,1,2,2]
[0,1,2,2]
sd(d1 ) = d1 ◦ d4
[0,0,0,2]
[0,1,1,2]
[0,1,1,2]
[0,2,2,2]
sd(d2 ) = d0 ◦ d4
[0,0,0,1]
[0,1,1,1]
[1,1,1,2]
[1,2,2,2].
Putting all this together, we get the following diagram representing sd(∆[2]),
[1,1]
>
>>
>>
>>
>>
>>
[1,1,1,2]
>
[0,1,1,1]
[0,1]
B <
[0,0]
[0,1,1,2]
a
[0,0,0,2]
c
[1,2]
]:
::
::
::
::
::
[0,1,2,2]
[1,2,2,2]
::
<<
::
<<
d
::
<<
::
<<
::
<<
:
< / [0,2] o
[0,2,2,2]
[2,2].
[0,0,1,2]
<
[0,0,0,1]
b
<<
<<
<<
<<
<<
<
>>
>>
>>
>>
>>
Example 5.2.8. Since sd commutes with pushouts we see that the 2- and 3-subdivisions of
∆[2] looks like
47
and
5.3
The natural homeomorphism E : |sd(X)| → |X|
Definition 5.3.1. For n ∈ N0 and t ∈ [0, 1] let En,t : ∆n ∆2n+1 denote the embedding
u = (u0 , . . . , un ) 7→ ((1 − t)un , (1 − t)un−1 , . . . , (1 − t)u0 , tu0 , tu1 , . . . , tun ).
Lemma 5.3.2. Let t ∈ [0, 1] and n ∈ N0 . The map En,t : ∆n ∆2n+1 satisfy the relations
En,t ◦ δ i = δ n+1+i ◦ δ n−i ◦ En−1,t ,
En,t ◦ σ = σ
j
n+1+j
◦σ
n−j
and
◦ En+1,t ,
where the δ i and σ j are as defined in (2.2.2).
Proof. Let u ∈ ∆n−1 and consider δ i (u) = (u0 , . . . , ui−1 , 0, ui , . . . un−1 ) ∈ ∆n .
En,t δ i (u) = (1 − t) un−1 , . . . , (1 − t) ui , 0, (1 − t) ui−1 , . . . , (1 − t) u0 ,
tu0 , . . . , tui−1 , 0, tui , . . . , tun−1
= δ n+1+i (1 − t) un−1 , . . . , (1 − t) ui , 0, (1 − t) ui−1 , . . . , (1 − t) u0 ,
tu0 , . . . , tui−1 , tui , . . . , tun−1
= δ n+1+i δ n−i ((1 − t) un−1 , . . . , (1 − t) u0 , tu0 , . . . , tun−1 )
= δ n+1+i ◦ δ n−i ◦ En−1,t (u) .
48
Similarly, let v ∈ ∆n+1 and consider σ j (v) = (v0 , . . . , vj−1 , vj + vj+1 , vj+2 , . . . , vn+1 ) ∈ ∆n .
En,t σ j (v) = (1 − t) vn+1 , . . . , (1 − t) vj+2 , (1 − t) vj+1 + (1 − t) vj , (1 − t) vj−1 , . . . , (1 − t) v0 ,
tv0 , . . . , tvj−1 , tvj + tvj+1 , tvj+2 , . . . , tvn+1
= σ n+1+j (1 − t) vn+1 , . . . , (1 − t) vj+2 , (1 − t) vj+1 + (1 − t) vj , (1 − t) vj−1 , . . . , (1 − t) v0 ,
tv0 , . . . , tvn+1
= σ n+1+j σ n−j ((1 − t) vn+1 , . . . (1 − t) v0 , tv0 , . . . , tvn+1 )
= σ n+1+j ◦ σ n−j ◦ En+1,t (v) .
Proposition 5.3.3. Let X be any simplicial set and let t ∈ [0, 1]. The collection of maps
id × En,t : sd(X)n × ∆n → X2n+1 × ∆2n+1 , n ∈ N0 induce a natural continuous map EX =
EX,t : |sd(X)| → |X| defined by
EX [x, u] = [x, En,t (u)].
where [x, u] ∈ |sd(X)| is a point with a representative (x, u) ∈ sd(X)n × ∆n = X2n+1 × ∆n .
Proof. The fact that the map EX is well-defined is due to (5.3.2). More precisely, for any
(x, t) ∈ sd(X)n × ∆n−1 , (y, v) ∈ sd(X)n × ∆n+1 and 0 ≤ i, j ≤ p, we have that
EX [x, δ i (u)] = [x, En,t (δ i (u))]
= [x, (δ n+1+i ◦ δ n−i ◦ En−1,t )(u)]
= [(dn−i ◦ dn+1+i )(x), En−1,t (u)]
= E[sd(di )(x), u],
and
EX [y, σ (v)] = [y, En,t (σj (v))]
j
= [y, (σ n+1+j ◦ σ n−j ◦ En+1,t )(v)]
= [(sn−j ◦ sn+1+j )(y), En+1,t (v)]
= E[sd(sj )(y), v].
For continuity we can use the final topology: EX is continuous if and only if EX ◦ |x| is
continuous for every x ∈ sd(X)n , n ∈ N0 ,
|x|
/ |sd(X)|
KKK
KKK
EX
K
EX ◦|x| KKK %
|∆[n]|
X.
Let [ιn , u] be any point in |∆[n]|, u ∈ ∆n . Then, the composite
EX ◦ |x| : |∆[n]| → |X|,
(EX ◦ |x|)[ι, u] = EX [x, u] = [x, En,t (u)],
is, up to homeomorphism, the same as the continuous map En,t : ∆n → ∆2n+1 .
To establish naturality, let f : X → Y be any simplicial map. We need to see that the
following diagram commutes
|sd(X)|
EX
|sd(f )|
|X|
/ |sd(Y )|
|f |
49
EY
/ |Y |.
Going clockwise we see that
[x, u] |sd(f )|
/ [sd(f )p (x), u]
EY
[sd(f )p (x), Ep,t (u)] = [f2p+1 (x), Ep,t (u)].
Counterclockwise,
[x, u]
_
EX
[x, Ep,t (u)] |f |
/ [f2p+1 (x), Ep,t (u)].
Lemma 5.3.4. For any simplicial set X and t, s ∈ [0, 1], the two maps EX,t : |sd(X)| → |X|
and EX,s : |sd(X)| → |X| are homotopic by the homotopy Hr : |sd(X)| × [0, 1] → |X|, Hr (P ) =
EX,(1−r)t+rs (P ).
Proof. Obviously, H0 = EX,t and H1 = EX,s . We need to verify that Hr is continuous for any
r ∈ [0, 1]:
By the final topology on |sd(X)| it suffices to show that the composite
Hr ◦ (|x| × id) : |∆[n]| × [0, 1] → |X|
is continuous for an arbitrary x ∈ sd(X)n , n ∈ N0 ,
|x|×id
/ |X| × [0, 1]
LLL
LLL
LLL
LLL
Hr
L
Hr ◦(|x|×id) LLLL
LLL
LL %
|∆[n]| × [0, 1]
|X|.
Up to natural homeomorphism, the map Hr ◦ (|x × id) is the same as the linear homotopy
hr : ∆n × [0, 1] → ∆2n+1 defined by hr (t) = En,(1−r)t+rs , where h0 = En,t and h1 = En,r .
Proposition 5.3.5. The map E = E∆[1],t : |sd(∆[1])| → |∆[1]| is a homeomorphism for each
t ∈ (0, 1).
Proof. Since |sd(∆[1])| is a compact space (sd(∆[1]) is finite) and |∆[1]| ∼
= ∆1 is Hausdorff (and
compact), it suffices to show that E is a bijection.
Any point in |sd(∆[1])| can be written as [[0, 0, 0, 1], (1 − u1 , u1 )] or [[0, 1, 1, 1], (1 − v1 , v1 )],
u1 , v1 ∈ [0, 1]. These two representations are the same if and only if u1 = v1 = 1,
[[0,0,0,1], (0, 1)] = [[0,0,0,1], δ 0 (1)]
= [sd(d0 )([0,0,0,1]), t]
= [[0,1], 1]
= [sd(d0 )([0,1,1,1]), 1]
= [[0,1,1,1], (0, 1)].
Assume P 6= Q are two points in |sd(∆[p])|. Then we have three possible cases:
50
1. If P = [[0,0,0,1], (1 − u1 , u1 )] and Q = [[0,1,1,1], (1 − v1 , v1 )], u1 , v1 6= 1, then
E(P ) = [[0,0,0,1], ((1 − t)u1 , (1 − t)(1 − u1 ), t(1 − u1 ), tu1 )]
= [(s0 ◦ s0 )[0,1], (u1 − tu1 , 1 − u1 − t + tu1 , t − tu1 , tu1 )]
= [[0,1], (1 − tu1 , tu1 )],
(in |∆[1]|)
and
E(Q) = [[0,1,1,1], ((1 − t)v1 , (1 − t)(1 − v1 ), t(1 − v1 ), tv1 )]
= [(s1 ◦ s1 )[0,1], (v1 − tv1 , 1 − v1 − t + tv1 , t − tv1 , tv1 )]
(in |∆[1]|)
= [[0,1], (v1 − tv1 , 1 − (v1 − tv1 )].
And (1 − tu1 , tu1 ) = (v1 − tv1 , 1 − (v1 − tv1 )) if and only if u1 = v1 = 1.
2. If P = [[0,0,0,1], (1 − u1 , u1 )] and Q = [[0,0,0,1], (1 − v1 , v1 )], u0 6= v0 , then E(P ) 6=
E(Q) by the equations in the previous case.
3. Similarly, if P = [[0,1,1,1], (1 − u1 , u1 )] and Q = [[0,1,1,1], (1 − v1 , v1 )], then E(P ) 6=
E(Q) by the equations in the first case.
Hence, E is injective.
Let [[0,1], (1 − r1 , r1 )], r ∈ [0, 1], be any point in |∆[1]|.
1. If 0 ≤ r1 ≤ t then [[0,0,0,1], (1 −
E[[0,0,0,1], (1 −
r1 r1
t , t )]
r1 r1
t , t )]
∈ |sd(∆[1]| (0 ≤
≤ 1)) and
= [[0,0,0,1], ((1 − t) rt1 , (1 − t)(1 −
= [(s0 ◦ s0 )([0,1]), ( rt1 − r1 , 1 −
=
[[0,1], ( rt1
− r1 + 1 −
r1
t
= [[0,1], (1 − r1 , r1 )].
2. If t ≤ r1 ≤ 1 then [[0,1,1,1], (1 −
E[[0,1,1,1], (1 −
r1
t
r1 −1 r1 −1
t−1 , t−1 )]
r1 −1 r1 −1
t−1 , t−1 )]
r1
t
r1
t ), t(1
−
r1
r1
t ), t t )]
− t + r1 , t − r1 , r1 )]
− t + r1 + t − r1 , r1 )]
∈ |sd(∆[1]|) (0 ≤
r1 −1
t−1
≤ 1), and
1 −1
= [[0,1,1,1], (1 − t) rt−1
, (1 − t)(1 −
= [(s1 ◦ s1 )([0,1]), (1 − r1 , 1 − t +
= [[0,1], (1 − r1 , r1 )].
r1 −1
r1 −1
r1 −1
t−1 ), t(1 − t−1 ), t t−1 ]
1 −1
1 −1
r1 − 1, 1 − t rt−1
, t rt−1
)]
Hence, E is surjective.
Proposition 5.3.6. For any p ∈ N0 , there exists a simplicial retraction
id
∆[p] /
i
/ ∆[1]×p
r
$
/ / ∆[p].
Proof. We define i : ∆[p] ∆[1]×p by
ip (ιp ) = ([0,...,0,1], [0,...,0,1,1], . . . , [0,1,...,1]) ∈ (∆[1]×p )p ,
where ιp = [0,1,...,p] ∈ ∆[p]. Since any n-simplex x ∈ ∆[p] can be written uniquely as
x = α∗ (ιp ) for some operator α : [n] → [p], we have that
in (x) = (α∗ ([0,...,0,1]), α∗ ([0,...,0,1,1]), . . . , α∗ ([0,1,...,1]))
= α∗ ([0,...,0,1], [0,...,0,1,1], . . . , [0,1,...,1])
= α∗ (ip (ιp )).
51
This shows that i is a well-defined simplicial map. If x 6= y are two n-simplices then x =
α∗ (ιp ) 6= β ∗ (ιp ) = y for two unique and distinct operators α, β : [n] → [p]. This implies that
α∗ (ip (ιp )) 6= β ∗ (ip (ιp )), so i is a cofibration.
We define r : ∆[1]×p ∆[p] to be the simplicial map which maps an n-simplex x =
(x1 , . . . , xp ) ∈ ∆[1]×p , xi ∈ ∆[1]n , to the n-simplex rn (x) : [n] → [p] defined by
rn (x)(k) =
p
X
xi (k).
i=1
To see that r is well-defined let x = (x1 , . . . , xp ) ∈ (∆[1]×p )n and let 0 ≤ i ≤ n. Then
∆[p]
di
(rn (x))(k) = (r(x) ◦ δi )(k)
(
r(x)(k)
if 0 ≤ k ≤ i − 1,
=
r(x)(k + 1)
if 0 ≤ k ≤ n − 1
(P
p
x` (k)
if 0 ≤ k ≤ i − 1,
= P`=0
p
if i ≤ k ≤ n − 1
`=0 x` (k + 1)
=
p
X
`=0
=
(x` ◦ δi )(k)
p
X
∆[1]
di
(x` )(k)
`=0
∆[1]×p
= rn−1 (di
(x))(k).
Similarly, let y = (y1 , . . . , yp ) ∈ (∆[1]×p )n and let 0 ≤ j ≤ n. Then
∆[p]
sj
(rn (y))(k) = (r(y) ◦ σj )(k)
(
r(x)(k)
if 0 ≤ k ≤ j,
=
r(x)(k − 1)
if j + 1 ≤ k ≤ n + 1
(P
p
y` (k)
if 0 ≤ k ≤ j,
= Pp`=0
if j + 1 ≤ k ≤ n + 1
`=0 y` (k − 1)
=
p
X
`=0
=
p
X
(y` ◦ σj )(k)
∆[1]
sj
(y` )(k)
`=0
∆[1]×p
= rn+1 (sj
(y))(k).
This shows that r is a well-defined simplicial map. To see that r is surjective and that r ◦ i is
the identity, note that
(rp ◦ ip )(ιp ) = rp ([0,...,0,1], [0,...,0,1,1], . . . , [0,1,...,1])
= ιp .
Proposition 5.3.7. The map E = E∆[p],t : |sd(∆[p])| → |∆[p]| is a homeomorphism for each
t ∈ (0, 1) and every p ∈ N0 .
52
Proof. The case of |sd(∆[0])| ∼
= |∆[0]| is obvious, and we have already seen that |sd(∆[1])| ∼
=
|∆[1]|. Since geometric realization and Segal’s subdivision commute with products, we have a
∼
=
homeomorphism E 0 = (E∆[1],t )×p : |sd(∆[1])|×p −
→ |∆[1]|×p . To see that E : |sd(∆[p])| → |∆[p]|
is a homeomorphism, consider the following commutative diagram
id
|sd(∆[p])| /
|sd(i)|
/ |sd(∆[1])|×p
|sd(r)|
)
/ / |sd(∆[p])|
∼
= E0
E
|∆[p]| /
E
/ |∆[1]|×p
|i|
/ / |∆[p]|.
5
|r|
id
E is injective: Let P, Q be two distinct points in |sd(∆[p])|. Using sd(i) and E 0 we see that
(E 0 ◦ |sd(i)|)(P ) 6= (E 0 ◦ |sd(i)|)(Q). Since E 0 ◦ |sd(i)| = |i| ◦ E and |i| is injective, E(P ) 6= E(Q).
P =
6_ Q |sd(i)|
/ |sd(i)|(P ) 6= |sd(i)|(Q)
_
E0
E
E(P ) 6= E(Q) |i|
/ (E 0 ◦ |sd(i)|)(P ) 6= (E 0 ◦ |sd(i)|)(Q).
E is surjective: Let R ∈ |∆[p]| be any point. Using |i|, (E 0 )−1 and then |sd(r)| we see that
(|sd(r)| ◦ (E 0 )−1 ◦ |i|)(R) is mapped to R by |E|.
((E 0 )−1 ◦ |i|)(R)
O
|sd(r)|
(E 0 )−1
R
|i|
/ (|sd(r)| ◦ (E 0 )−1 ◦ |i|)(R)
_
E
_
/ |i|(R) |r|
/ R.
Hence, E : |sd(∆[p])| → |∆[p]| is a continuous bijection with continuous inverse E −1 = |sd(r)| ◦
(E 0 )−1 ◦ |i|.
Theorem 5.3.8. For each t ∈ (0, 1), the map E = EX,t : |sd(X)| → |X| is a natural homeomorphism.
53
Proof. Writing X ∼
= colimx∈simp(X) ∆[dim(x)] we have the following
|sd (X) | = sd
colim ∆[dim (x)] x∈simp(X)
∼
(sd : sSet → sSet preserves colimits)
= colim sd (∆[dim (x)]) x∈simp(X)
∼
=
∼
=
colim |sd (∆[dim (x)]) |
x∈simp(X)
colim |∆[dim (x)]|
x∈simp(X)
(geometric realization is a left adjoint)
∼
=
(the natural homeomorphism E : |sd(∆[dim(x)])| −
→ |∆[dim(x)]|)
∼
= |X|.
Corollary 5.3.9. A simplicial set X is finite if and only if sd(X) is finite.
54
Chapter 6
's
The simple map eX : sd(X) −−→ X
6.0.1
Involutive functor revisited
Definition 6.0.10. Let X be a simplicial set. By precomposing with the opposite of the
involutive functor (see 5.1.1) we obtain a simplicial set
X op = X ◦ (−op )o : ∆op → sSet,
where
• Xnop = Xn , and
• the structure maps are defined by
– dX
i
op
– sX
j
op
op
,
: Xnop → Xn−1
op
,
: Xnop → Xn+1
op
(x) = dX
n−i (x),
op
(x) = sX
n−j (x).
dX
i
sX
j
If f : X → Y is a simplicial map, then f op : X op → Y op is the same map,
fnop = fn
for each n ∈ N0 .
Hence, the assignment X 7→ X op defines a functor
−op : sSet → sSet.
Lemma 6.0.11. Let X be a simplicial set. Then
sd (X op ) = sd (X) .
Proof. This is due to (5.1.6),
sd (X op ) = X ◦ (−op )o ◦ sd∆
o
= X ◦ sd∆
o
= sd(X).
Lemma 6.0.12. Let X be a simplicial set. Then the spaces |X| and |X op | are naturally
homeomorphic.
Proof. With some abuse of notation, for each n ∈ N0 let −op : ∆n → ∆n denote the homeomorphism
t = (t0 , . . . , tn ) 7→ (tn , . . . , t0 ) = top .
55
The map −op induces a homeomorphism (with the same name)
∼
=
∼
=
−op : |X| −
→ |X op |,
[x, t] 7→ [x, top ] ,
with inverse −op : |X op | −
→ |X| induced by the same map −op : ∆q → ∆q .
As for naturality, let f : X → Y be any simplicial map. Then,
|f |
|X|
∼
=
[x, t] / |Y |
|f |
/ [f (x) , t]
_
_
∼
=
|X op |
|f op |
/ |Y op |
[x, top ] / [f (x) , top ] .
|f op |
Example 6.0.13. The simplicial set ∆ [2]op is represented by the diagram
[1] bE
EE
EE
EE
EE
E
yy
yy
y
yy
yy
[0, 1, 2]
[0,1]
yy
y
yy
yy
y
|y
[0] o
6.0.2
[1, E
2]
E
EE
EE
EE
EE
[2].
[0, 2]
The natural transformation id =⇒ sd∆
op
Definition 6.0.14. For each n ∈ N0 let e∆
[n] : [n] sd ([n]) = [n] t [n] = [2n + 1] denote the
face operator defined by
n+1
e∆
(k) = k + n + 1.
[n] (k) = (δ0 )
Lemma 6.0.15. The collection (of components) {e∆
[n] | n ∈ N0 } defines a natural transformation
e∆ : id =⇒ sd∆
in the category ∆.
Proof. Let α : [n] → [m] be any operator in ∆. We need to verify that the diagram
[n]
α
e∆
[m]
e∆
[n]
sd ([n])
∆
/ [m]
sd(α)
/ sd∆ ([m])
commutes. Let k ∈ [n], then we see that
k_
e∆
[n]
k+n+1
k
∆
sd (α)
/ sd∆ (α) (k + n + 1)
56
α
/ α (k)
_
e∆
[m]
α (k) + m + 1.
By definition of sd∆ (α),
sd∆ (α) (k + n + 1) = α (k) + m + 1.
Note that by the equality −op ◦ sd∆ = sd∆ , we also have a natural transformation e∆
op
− =⇒ sd in ∆ with components
op
e∆
: [n]op → sd ([n])
[n]
defined by
6.0.3
e∆
[n]
op
n+1
(k) = (δ0op )
op
:
(k) = (δn+1 )n+1 (k) = k.
The natural transformation e : sd =⇒ id
Definition 6.0.16. Let X be a simplicial set. We denote by
eX = X ◦ (e∆ )o : sd(X) = X ◦ (sd∆ )o X,
the surjective simplicial map defined by
dim(x)+1
eX (x) = (dX
(x).
0 )
dim(x)+1 (x) maps to x.
Note that eX is surjective sice (sX
0 )
Lemma 6.0.17. The collection of components {eX | X ∈ sSet} define a natural transformation
e : sd =⇒ id
in the category of simplicial sets.
Proof. Let f : X → Y be a simplicial map and consider the diagram
sd(X)
sd(f )
/ sd(Y )
eX
eY
X
/ Y.
f
Let x ∈ Xq . Then,
x
x
_
eX
q+1 (x)
(dX
0 )
fq
/ fq ((dX )q+1 (x))
0
sd(f )
/ sd(f )q (x)
_
eY
(dY0 )q+1 (sd(f )q (x)),
and
q+1
(dY0 )q+1 (sd(f )q (x)) = (dY0 )q+1 (f2q+1 (x)) = (dX
(fq (x))
0 )
since f is a simplicial map.
57
If no ambiguity arises, we will skip the subscript X and just write e : sd(X) → X for the
component eX .
Proposition 6.0.18. Let X be any simplicial set. Then,
|eX | = EX,1 : |sd(X)| → |X|,
and
Proof. Let [x, t] ∈ |sd(X)| be a point with the representative (x, t) ∈ sd(X)n × ∆n . Then,
|eX |[x, t] = [(d0 )n+1 (x), t]
= [x, (δ 0 )n+1 (t)]
= [x, (0, . . . , 0, t0 , . . . , tn )]
= EX,1 [x, t].
By the equality sd(X) = sd(X op ) we also have a natural transformation eop : sd =⇒ −op in
sSet with components
op
op : sd(X) X
eop
X = eX
defined by
eX op (x) = dX
0
op
dim(x)+1
dim(x)+1
(x) = dX
(x).
dim(x)+1
Proposition 6.0.19. Let X be any simplicial set. Then,
−op ◦ |eX op | = EX,0 : |sd(X)| → |X|,
where −op is the natural homeomorphism |X|op ∼
= |X|.
Proof. Let [x, t] ∈ |sd(X)| with the representative (x, t) ∈ sd(X)n × ∆n . Then,
op
−op ◦ |eX op | = −op ([(dX
)n+1 (x), t])
0
op
([(dX
)n+1 (x), t] ∈ |X op |)
0
= −op ([x, (0, 0, . . . , 0, t0 , . . . , tn )])
= [x, (tn , . . . , t0 , 0, . . . , 0)]
= EX,0 [x, t].
6.0.4
e : sd(X) X is simple
Example 6.0.20. Consider the standard simplicial-1-simplex ∆[1]. The map e is easily described by the following table,
sd(∆[1])]
[0,0]
[0,1]
[0,1]
[0,0,0,1]
[0,1,1,1]
e
[0]
[1]
[1]
[0,1]
[1,1] = s0 ([1]).
Thus, if P ∈ |∆[1]| we have the following possible cases for |e|−1 (P ):
• If P = [[0], 1], then |e|−1 (P ) = [[0,0], 1],
58
• if P = [[0,1], t] is an interior point (t ∈ int(∆1 )), then |e|−1 (P ) = [[0,0,0,1], t], and
• if P = [[1], 1], then |e|−1 (P ) = |cl([0, 1, 1, 1])| ∼
= |∆[1]op | ' ∗.
This means that e : sd(∆[1]) ∆[1] is simple. In a more geometric fashion, the map e can
be described by the following picture where the dashed lines describe how the points in the
geometric realization are mapped:
e∆[1]
Proposition 6.0.21. Let p ∈ N0 . Then the map e = e∆[p] : sd(∆[p]) ∆[p] is simple.
i
r
Proof. By the simplicial retraction ∆[p] →
− ∆[1]×p →
− ∆[p] described in (5.3.6) we have the
commutative diagram
id
sd(∆[p]) /
sd(i)
/ sd(∆[1])×p
e0 =(e∆[1] )
×p
e
∆[p] /
i
sd(r)
's
/ ∆[1]×p
)
/ / sd(∆[p])
e
r
/ / ∆[p].
5
id
Let P be any point in |∆[p]| and consider the commutative diagram
id
|e|−1 (P ) /
|sd(i)|
/ |e0 |−1 (|i|(P ))
|sd(r)|
|e0 |
|e|
{P } /
|i|
)
/ / |e|−1 (P )
|e|
/ {|i|(P )}
|r|
/ /5 P.
id
The fact that |e0 |−1 (|i|(P )) is contractible implies that the identity map on |e|−1 (P ) is nullhomotopic, hence e is simple.
'
s
Theorem 6.0.22. The simplicial map e : sd(X) −−→
X is simple for any finite simplicial set X.
59
Proof. This is done by induction on the dimension of X. If dim(X)
` = 0, this is trivial.0 For the
0
∼
general case dim(X) = p, we can choose an isomorphism X = X ∂∆[p] ∆[p], where X is finite
and dim(X 0 ) ≤ dim(X). Hence, it suffices to show that
a
a
∆[n] ∼
sd(∆[p]) X 0
e : sd(X) ∼
=X
= sd(X 0 )
∂∆[n]
sd(∂∆[p])
'
s
is simple. Using the inductive hypothesis, we can assume that eX 0 : sd(X 0 ) −−→
X 0 and e∂∆[p] :
'
'
s
s
sd(∂∆[p]) −−→
∂∆[p] are both simple. The proposition above shows that e∆[p] : sd(∆[p]) −−→
'
s
∆[p] is simple. Using the gluing lemma (3.1.9), we can conclude that e : sd(X) −−→
X is a
simple map.
60
Chapter 7
Classifying natural simple maps
's
k
sd (X) −−→ X
In the previous chapter we studied the natural simplicial map eX : sd(X) → X which turns
out to be simple if X is finite. A natural question to ask is if it is the only natural simple map
's
sd(X) −−→
X, and even more generally how many natural simple maps are there from sdk (X)
to X for k ∈ N?
7.1
Natural transformations id =⇒ (sd∆ )k
Proposition 7.1.1. The natural transformation e∆ : id =⇒ sd∆ is unique.
Proof. Let a : id =⇒ sd∆ be a natural transformation, a is then uniquely determined by its
component a[0] since we have a commutative diagram
δi
[0] /
δi
/ [1] /
a[0]
a[1]
sd∆ (δi )
[1] /
δi
/ ···
sd∆ (δi )
/ ··· .
/ [2] /
a[2]
∆
/ [3] / sd (δi )
/ [5] /
As δi and sd(δi ) vary in 0 ≤ i ≤ n, a[n−1] uniquely determine what a[n] is. Assume a[0] (0) = 0.
Then,
0_
a[0]
δ0
/1
_
0
sd(δ0 )=δ2 ◦δ1
0_
a[0]
a[1]
/0
δ1
0
/0
_
sd(δ1 )=δ3 ◦δ0
a[1]
/ 1.
But this is contradictory since a[1] is supposed to be an operator. Hence, a[0] (0) = 1 and
a = e∆ .
Example 7.1.2. For the more general case of natural transformations id =⇒ (sd∆ )k , we already
know about 2k−1 choices due to the equality −op ◦ sd∆ = sd∆ ,
id
e∆
/ sd∆
e∆
( )
op
e∆
// sd∆
2
61
e∆
( )
op
e∆
// · · ·
e∆
( )
op
e∆
//
sd∆ .
Proposition 7.1.3. There are exactly 2k−1 natural transformations id =⇒ (sd∆ )k .
Proof. Let a : id =⇒ sd∆ be a natural transformation. As before, a is uniquely determined by
its component a[0] since we have a commutative diagram
δi
[0] /
(sd∆ )
− 1] /
k
(δi )
δi
/ [2] /
a[1]
a[0]
[2k
δi
/ [1] /
/ ···
a[2]
k
k
(sd∆ ) (δi )
(sd∆ ) (δi )
/ [2k+1 − 1] /
/ [2k · 3 − 1] /
/ ···
as before. The same argument as in the proof of (7.1.1) shows that a[0] (0) cannot be 0. Assume
0 < a[0] = 2n ≤ 2k − 1 for some n ∈ N0 . Then,
0_
δ0
/1
_
a[0]
a[1]
2n
k
sd (δ0 )
0_
δ1
/0
_
a[0]
/ 2n + 2
a[1]
0
k
sd (δ1 )
/ 2n + 1,
since
sdk (δ0 ) = δ2k+1 −2 ◦ δ2k+1 −3 ◦ δ2k+1 −6 ◦ δ2k+1 −7 ◦ · · · ◦ δ10 ◦ δ9 ◦ δ6 ◦ δ5 ◦ δ2 ◦ δ1
and
sd (δ1 ) = δ2k+1 −1 ◦ δ2k+1 −4 ◦ δ2k+1 −5 ◦ δ2k+1 −8 ◦ · · · ◦ δ11 ◦ δ8 ◦ δ7 ◦ δ4 ◦ δ3 ◦ δ0 .
k
7.2
The natural map e : sd =⇒ id is unique
Theorem 7.2.1. The natural transformation e : sd =⇒ id in sSet is unique.
Proof. Assume a : sd =⇒ id is a natural transformation in sSet and consider the commutative
diagram
sd(∆[0]) /
sd(∆δi )
O
/ sd(∆[1])
a∆[0] ∼
=
a∆[1]
∆[0] /
∆δi
/ ∆[1]
where i = 0, 1. Then, on vertices we have that
[0,0]
_
sd(∆δ0 )
a∆[0]
/ [1,1]
_
[0,0]
_
a∆[1]
[0]
∆δ0
sd(∆δ1 )
a∆[0]
/ [1]
a∆[1]
[0]
62
/ [1,1]
_
∆δ1
/ [1].
Recall that ∆δi : ∆[n − 1] → ∆[n] and sd(∆δi ) : sd(∆[n − 1]) → sd(∆[n]), 0 ≤ i ≤ n are the
simplicial maps defined by
{α : [m] → [n − 1]} 7→ {δi ◦ α : [m] → [n]},
and
{β : [2m + 1] → [n − 1]} 7→ {δi ◦ β : [2m + 1] → [n]}.
This uniquely determines the map a∆[1] : If a∆[1] ([0,1]) = [0], then [0,1,1,1] is mapped to
[0,1] and [0,0,0,1] to [0,0]. But that implies that
[1] = d0 (a∆[1] ([0,1,1,1])) = a∆[1] (sd(d0 )([0,1,1,1])) = a∆[1] ([0,1]) = [0].
Thus, a∆[1] = e∆[1] .
×p
An immediate consequence is that the component a∆[1]×p equals e∆[1]
: sd(∆[1]×p ) =
sd(∆[1])×p → ∆[1]×p due to the commutative diagrams
sd(∆[1])×p
a∆[1]× p
/ ∆[1]×p
pri
pri =sd(pri )
sd(∆[1])
/ / ∆[1].
e∆[1]
where 0 ≤ i ≤ p.
×p The component a∆[p] : sd(∆[p]) → ∆[p] is defined by a = r ◦ e∆[1]
◦ sd(i), where r ◦ i
is as described in (5.3.6),
id
sd(∆[p]) /
sd(i)
/ sd(∆[1])×p
sd(r)
)
/ / sd(∆[p])
(e∆[1] )
×p
a∆[p]
∆[p] /
/ ∆[1]×p
i
a
r
/ / ∆[p].
5
id
For the last part, consider the commutative diagram
colimx∈X sd(∆[dim(x)])
∼
=
colimx e∆[dim(x)] 's
/ sd(X)
eX
colimx∈X ∆[dim(x)]
∼
=
/ X,
which implies that any natural map sd(X) → X is unique (eX is determined by the values on
simplices of X)
63
7.3
'
s
Natural simple maps sdk (X) −→
X, k > 1
We know that there are at least 2k−1 different natural transformations sdk =⇒ id originating
k
from the 2k−1 different natural transformations id =⇒ sd∆ in the category of finite ordinals,
and if X is finite the 2k−1 natural maps sdk (X) → X we obtain are simple. The question we
want to answer in this section is:
'
s
If X is finite, how many natural simple maps sdk (X) −−→
X exist?
Example 7.3.1. The two natural simple maps e∆[1] ◦ esd(∆[1]) and e∆[1] ◦ e(sd(∆[1]))op from
sd2 (∆[1]) to ∆[1] can be visualized by the following two pictures where the dashed lines describe
how the points in the geometric realization are mapped:
esd(∆[1])
esd(∆[1])
esd(∆[1])op
esd(∆[1])
And more generally, if X is finite we know that we have at least 2k−1 natural simple maps
sdk (X) → X,
sd (X)
k
esdk−1 (X)
esdk−1 (X)op
//
sdk−1 (X)
esdk−2 (X)
esdk−2 (X)op
// · · ·
esd(X)
esd(X)op
//
sd(X)
eX
/ X.
Notation 7.3.2. A vertex x ∈ sdk (∆[1])0 = ∆[1]2k −1 can be represented by [0, 0, . . . , 0, 1, 1, . . . , 1],
|
{z
}
2k
and similarly a 1-simplex y ∈ sd (∆[1])2k+1 −1 can be represented by [0, 0, . . . , 0, 1, 1, . . . , 1]. In|
{z
}
k
2k+1
64
stead of writing these long strings of 0’s and 1’s, we introduce the following notation,
x = (2k − n, n) = [ 0,0, ...,0, 1,1, ...,1 ],
|
{z
} |
{z
}
n
2k −n
y = (2
k+1
and
− m, m) = [ 0,0, ...,0, 1,1, ...,1 ].
{z
} |
{z
}
|
m
2k+1 −m
By (5.2.2) we see that sdk (s0 ) : sdk (∆[1])0 → sdk (∆[1])1 is
sdk (s0 ) = s0 ◦ s1 ◦ · · · ◦ s2k −1 ,
we see that the non-degenerate 1-simplices of sdk (∆[1]) are those of the form (2k+1 − m, m)
where m is odd. Similarly, since sdk (d0 ) : sdk (∆[1])1 → sdk (∆[1])0 and sdk (d1 ) : sdk (∆[1])1 →
sdk (∆[1])0 are
sdk (d0 ) = d1 ◦ d2 ◦ d5 ◦ d6 ◦ · · · ◦ d2k+1 −3 ◦ d2k+1 −2 ,
and
sdk (d1 ) = d0 ◦ d3 ◦ d4 ◦ d7 ◦ · · · ◦ d2k+1 −4 ◦ d2k+1 −1 ,
we see that the non-degenerate 1-simplices (2k+1 − (4p + 1), 4p + 1) are of the form ∗ −→ ∗ and
the 1-simplices (2k+1 − (4p − 1), 4p − 1) are of the form ∗ ←− ∗. More precisely, if (2k − n, n)
and (2k − (n + 1), n + 1) are two adjacent vertices, then the 1-simplex connecting them is
where
(2k − n + 2k − (n + 1), n + n + 1) = (2k+1 − (2n + 1), 2n + 1),
(
(2k − n, n)
sdk (d0 )((2k+1 − (2n + 1), 2n + 1)) =
2k − (n + 1), n + 1)
if
if
2n + 1 = 4p − 1 for some p,
2n + 1 = 4p + 1 for some p
(
(2k − (n + 1), n + 1)
sdk (d1 )((2k+1 − (2n + 1), 2n + 1) =
(2k − n, n)
if
if
2n + 1 = 4p − 1 for some p,
2n + 1 = 4p + 1 for some p.
and
(2k − n, n)
(2k − n, n) o
(2k+1 −(2n+1),2n+1)
(2k+1 −(2n+1),2n+1)
/ (2k − (n + 1), n + 1)
if
2n + 1 = 4p + 1,
(2k − (n + 1), n + 1)
if
2n + 1 = 4p − 1.
An immediate consequence of this is that a vertex (2k − n, n) has only “outgoing” (resp. “incoming”) non-degenerate 1-simplices if n is even (resp. odd).
Theorem 7.3.3. Let X be a finite simplicial set. Then there are exactly 2k−1 natural simple
's
maps sdk (X) −−→
X.
'
s
Proof. Assume a∆[1] : sdk (∆[1]) −−→
∆[1] is a natural simple map. Consider the two commutative diagrams
sdk (∆[0]) /
sdk (∆δi )
O
a∆[0] ∼
=
a∆[1]
∆[0] /
/ sdk (∆[1])
∆δi
65
/ ∆[1],
where i = 0, 1. Then,
[0,...,0]
_
k
sd (∆δ0 )
/ (0, 2k )
_
[0,...,0]
_
a∆[1]
a∆[0]
a∆[0]
/ [1]
[0] ∆δ0
k
sd (∆δ1 )
/ (2k , 0)
_
a∆[1]
[0] ∆δ1
/ [1].
Furthermore, a∆[1] takes the vertex (1, 2k − 1) to [1] in ∆[1] by the same argument as in the
'
s
uniqueness of e∆[1] : sd(∆[1]) −−→
∆[1].
To see that there are only 2k−1 possible choices of a simple and natural a∆[1] note that
1. When restricted to the simplicial subset ∆[1] ∼
= ∆n [1] = cl((2k+1 − n, n)) of sdk (∆[1]), n
odd, a∆[1] is simple onto its image.
2. If (2k+1 − n, n) 7→ [0,1], then a∆[1] ∆n [1] is a natural isomorphism onto its image.
3. If two or more (non-degenerate) 1-simplices were to map onto [0,1], a∆[1] would not be
simple since the inverse image of an interior point of |∆[1]| would then be a disjoint union
of points in sdk (∆[1]).
4. Since a∆[1] is surjective, there exists a unique non-degenerate (2k+1 − n, n), and n must
be of the form 4p + 1 since cl((2k+1 − (4q − 1), 4q − 1) ∼
= ∆[1]op , and there is no natural
op
isomorphism ∆[1] ∼
= ∆[1] .
5. If (2k+1 − (4p + 1), 4p + 1) 7→ [0,1], then (2k+1 − n, n) 7→ s0 ([0]) for every n < 4p + 1
and (2k+1 − m, m) 7→ s0 ([1]) for m > 4p + 1. If this was not the case, step 2) would
apply.
6. And finally, there are only 2k−1 possible choices for p:
0 ≤ 4p + 1 ≤ 2k+1 − 3
⇐⇒ − 1 ≤ 4p ≤ 2k+1 − 4
((2k+1 − 1, 1) cannot map to[0,1])
⇐⇒ − 1/4 ≤ p ≤ 2k−1 − 1.
'
s
Hence, there are exactly 2k−1 natural simple maps sdk (∆[1]) −−→
∆[1].
k
×p
×p
Since any map sd (X) → X is uniquely determined by its projections we see that there
are exactly 2k−1 natural simple maps sd(∆[1])×p → ∆[1]×p . More precisely, any natural simple
66
'
s
map sdk (∆[1])×p −−→
∆[1]×p is of the form η ×p where η is one of the 2k−1 natural simple maps
'
s
sdk (∆[1]) −−→
∆[1],
id
sdk (∆[1]) o
pri
sdk (∆[1])×p
pri
*
/ sdk (∆[1])
η ×p 's
η 's
prj
∆[1] o
η
pri
∆[1]×p
/ ∆[1].
5
id
If one were to pick different η’s on the left and right hand side, the diagram would obviously
not commute.
By the same “retraction trick” as in the proof of (7.2.1), there are exactly 2k−1 natural simple
's
's
maps sdk (∆[p]) −−→
∆[p]. More precisely, any natural simple sdk (∆[p]) −−→
∆[p] is of the form
's
r◦(η ×p ) sd(i), where η ×p is one of the 2k−1 possible natural simple maps sdk (∆[1])×p −−→
∆[1]×p
id
sd(∆[p]) /
/ sd(∆[1])×p
sd(i)
sd(r)
)
/ / sd(∆[p])
η ×p
∆[p] /
/ ∆[1]×p
i
r
/ / ∆[p].
5
id
And finally, any natural ηX : sdk (X) → X is determined by the diagram
colimx∈X sdk (∆[dim(x)])
∼
=
/ sdk (X)
ηX
colimx η∆[dim(x)] 's
colimx∈X ∆[dim(x)]
∼
=
/ X.
And since there are 2k−1 choices of natural simple maps on the left hand side, we obtain 2k−1
choices for natural simple maps for ηX .
67
68
Chapter 8
An answer to our question
As described in the introduction, we want to find an answer to the question:
'
s
If X is a finite simplicial set, is there a natural simple map γX : Dsdk (X) −−→
X for
some k ∈ N ?
With the tools we have developed we see that if such a map were to exist, we would obtain a
natural simplicial map ηX = γX ◦ βx : sdk (X) → X, where βX : sdk (X) X is the canonical
desingularization map (4.0.12).
βX
ηX
/X
<
z
zz
z
zz
zz
z
zz
zz γX
z
zz
zz
sdk (X)
Dsdk (X).
If X is non-singular (for example X = ∆[1]), then βx is an isomorphism and ηX = γX ◦
βX is simple. Thus, ηX is one of the 2k−1 natural simple maps we classified in the previous
chapter. With this, we are able to provide a counter example the existence of γX , namely
X = ∆[2] cl([0,2]) which we described in (4.0.19). We start with sketching case of sd2 (X),
which outlines our approach.
Example 8.0.4. Let X = ∆[2] cl([0,2]). In (4.0.19) we saw that DX ∼
= ∆[0]. If we apply
Segal subdivision once and the pass to the desingularization, we get the following picture, where
the fat dashed is that the edge is
1)
2)
3)
4)
69
More precisely, to make DX non-singular we need to “mod out” (= identify with ∆[0]) the
two copies of ∆[2] cl([0, 2]). This means that the 1-simplices [0,0,1,2] and [0,1,2,2] are
identified with ∆[0], which leaves us with with a standard simplicial-1-simplex. Obviously, there
is no natural simple map from this to X.
If we apply Segal subdivision twice and pass to the desingularization, we get the following
picture:
1)
2)
3)
4)
This looks more promising, but we collapse the most important parts. More precisely, the two
's
∆[2] map the two non-degenerate 2-simplices a =
possible natural simple maps sd2 (∆[2]) −−→
[0,0,0,0,0,0,0,0,0,0,1,2] and b = [0,0,0,0,1,2,2,2,2,2,2,2] in sd2 (∆[2]) to [0,1,2]
in ∆[2],
a
b
sd2 (d1 ) = d1 ◦ d4 ◦ d7 ◦ d10
[0,0,0,0,0,0,0,2]
[0,0,0,2,2,2,2,2]
e∆[2] ◦ esd(∆[2]
[0,1,2]
[2,2,2]
e∆[2] ◦ esd(∆[2]op
[0,0,0]
[0,1,2],
where
e∆[2] ◦ esd(∆[2])
e∆[2] ◦ esd(∆[2])op
2
2
= (d0 )3 ◦ (sd(d0 ))3 = (d0 )9 ,
and
= (d0 )3 ◦ (d7 )6 .
'
s
For the two possible natural simple maps sd2 (X) −−→
X this means that
a
b
eX ◦ esd(X)
c
-
eX ◦ esd(X)op
c
where a and b denote the images of a and b in sd2 (X), and c denotes the image of [0,1,2] in
X. From this we see that there is no natural simple map γX : Dsd2 (X) → X, since βsd2 (X) (a)
and βsd2 (X) (b) are degenerate in Dsd2 (X).
Lemma 8.0.5. Let X be the finite simplicial set ∆[2] cl([0,2]). Then here is no natural
's
simple map γX : Dsdk (X) −−→
X for each k ∈ N0 .
70
Proof. Claim 1: A 2-simplex in sdk (∆[2]) = ∆[2]2k ·3−1 that is mapped to [0,1,2] in ∆[2]
under any of the 2k−1 possible natural simple maps ∆[2] must be of the form [0, 0, ..., 0,
|
{z
}
0, 1, 2, 2, ..., 2] except the 2-simplex [0,1,2,2,...,2].
| {z }
6n 2’s
2k · 3 − 3 − 6n 0’s
'
s
Proof of claim 1: Since the final step from sd(∆[2]) −−→
∆[2] is e∆[2] we see that x is not [0,
1, 2, 2, ..., 2]. The first part is a consequence of the fact that eX : sd(X) → X removes
the first half of a simplex and eX op : sd(X) → X op removes the second half. Thus, the first step
from sdk (∆[2]) to sdk−1 (∆[2]) removes 0 or 2k−1 · 3 2’s from x, the second step from sdk−1 (∆[2])
to sdk−2 (∆[2]) removes 0 or 2k−2 · 3 2’s, and so on. Thus, the final amount of 2’s removed from
x is the sum
a1 · 2k−1 · 3 + a2 · 2k−2 · 3 + · · · + a2k−1 · 2 · 3,
which obviously is divisible by 6. Hence, x is of the form described.
Claim 2: If x is as described above, then sdk (d1 )(x) = (2k+1 − (4n + 1), 4n + 1) is the 1simplex with 2k+1 − (4n + 1) leading 0’s and 4n + 1 2’s.
Proof of claim 2: By (5.2.2), sdk (d1 ) : sdk (∆[2])2 → sdk (∆[2])1 is
sdk (d1 ) = d1 ◦ d4 ◦ d7 ◦ d1 0 ◦ · · · ◦ d2k ·3−5 ◦ d2k ·3−2 ,
thus
sdk (d1 )(x) = [0, b
0, 0, 0, b
0, 0, 0, b
0, . . . , 0, 0b
1, 2, 2, b
2, . . . , 2b
2, 2]
= [0, 0, . . . , 2, 2, . . . , 2]
| {z }
4n 2’s
And now we’re done. If x is a 2-simplex of the form described above, then x(0) = x(2) in
sdk (∆[2]) sdk (cl([0,2])), and the desingularization map βsdk (X) takes x to a degenerate simplex
in Dsdk (X). Hence, there is no natural simple map γX : Dsdk (X) → X since βX (x) is degenerate
and x maps to the non-degenerate 2-simplex in X by one of the 2k−1 natural simple maps
's
sdk−1 (X) −−→
X.
An immediate consequence of this is
Theorem 8.0.6. Let X be a finite simplicial set. Then there is no natural simple map γX :
's
X for any k ∈ N.
Dsdk (X) −−→
71
72
Appendix A
Bökstedt-Hsiang-Madsen’s edgewise
subdivision
In [BHM93] Bökstedt, Hsiang and Madsen defined a defined another edgewise subdivision of
simplicial sets. Since its construction is very similar to Segal’s, we will only sketch the theory
regarding this functor.
Definition A.0.7. Let sdr : ∆ → ∆ the r-fold concatenation functor, r = 2, 3, 4, . . ., given by
the following assignments:
• sd∆
r ([n]) = [n] t [n] t · · · t [n] = [r(n + 1) − 1], and
|
{z
}
r times
∆
∆
• if f : [n] → [m] is an operator, let sd∆
r (f ) : sdr ([n]) → sdr ([m]) be the operator defined
by
sd∆
t f t · · · t f )(k)
r (f )(k) = (f
|
{z
}
r times
if 0 ≤ k ≤ n,
f (k)
if n + 1 ≤ k ≤ 2n + 1,
f (k − (n + 1)) + m + 1
= f (k − 2(n + 1)) + 2(m + 1) if 2n + 2 ≤ k ≤ 3n + 2,
..
.
f (k − r(n + 1)) + r(m + 1) if(r − 1)(n + 1) ≤ k ≤≤ r(n + 1) − 1,
= f (k 0 ) + s(m + 1)
(k = k 0 + s(n + 1),
0 ≤ k 0 ≤ n).
Lemma A.0.8. The r-fold concatenation maps the elementary face and degeneracy operators
δi : [n − 1] → [n],
to the operators
and
σj : [n + 1] → [n]
∆
∆
sd∆
r (δi ) : sdr ([n − 1]) = [rn − 1] → sdr ([n]) = [r(n + 1) − 1]),
where
and
∆
∆
sd∆
r (σj ) : sdr ([n + 1]) = [r(n + 2) − 1] → sdr ([n]) = [r(n + 1) − 1])
sd∆
r (δi ) = δ(r−1)(n+1)+i ◦ δ(r−2)(n+1)+i ◦ · · · ◦ δ2(n+1)+i ◦ δ(n+1)+i ◦ δi ,
sd∆
r (σj )
= σ(r−1)(n+1)+j ◦ σ(r−2)(n+1)+j ◦ · · · ◦ σ2(n+1)+i ◦ σ(n+1)+i ◦ σj .
73
and
Definition A.0.9. For any simplicial set X let sdr (X) denote the simplicial set X ◦ (sdr )o :
∆o → Set. More precisely, it is the simplicial set given by
• sdr (X)n = Xr(n+1)−1 , and
• structure maps
sdr (di ) : sdr (X)n = Xr(n+1)−1 → sdr (X)n−1 = Xrn−1 ,
where
and
sdr (sj ) : sdr (X)n = Xr(n+1)−1 → sdr (X)n+1 = Xr(n+2)−1 ,
sdr (di ) = di ◦ d(n+1)+i ◦ d2(n+1)+i ◦ · · · ◦ d(r−2)(n+1)+i ◦ d(r−1)(n+1)+i ,
and
sdr (sj ) = sj ◦ s(n+1)+j ◦ s2(n+1)+j ◦ · · · ◦ s(r−2)(n+1)+j ◦ d(r−1)(n+1)+j .
We will refer to this functor as Bökstedt-Hsiang-Madsen’s edgewise subdivision or just edgewise
subdivision.
Proposition A.0.10. Let X be a simplicial set. The diagonal embedding dr : ∆n ∆r(n+1)−1 ,
1
u 7→ (u0 , u1 , . . . , un , u0 , . . . , un , u0 , . . . , . . . , un )
r
'
s
induce a natural homeomorphism Dr : |sdr (X)| −−→
|X|.
Proof. Sketch of proof: One checks that this holds for the standard simplicial-1-simplex, then
apply the simplicial retraction (5.3.6). The general case follows by a colimit argument just as
for Segal’s subdivision.
Example A.0.11. The diagram representing sd2 (∆[2]) looks like:
Obviously, the pattern here repeats itself. This is sd4 (∆[2]):
74
From this we see that this subdivision is unsuitable
for finding an improvement functor. Indeed,
consider the singular simplicial set X = ∆[2] cl([0,2]). The fat dashed line denotes the
subdivided cl([0, 2]). If we were to desingularize sd4 (X) we must collapse the “filled in” 2simplices in the following picture:
In turn, this would imply that we get the following picture, and we start all over:
Thus, Dsdr (X) ∼
= ∆[0] for all r
75
76
Bibliography
[BHM93] M. Bökstedt, W.C. Hsiang, and I. Madsen, The cyclotomic trace and algebraic Ktheory of spaces, Inventiones Mathematicae 111 (1993), no. 1, 465–539.
[EZ50]
S. Eilenberg and J.A. Zilber, Semi-simplicial complexes and singular homology, Ann.
of Math 51 (1950), no. 4, 9.
[FP90]
R. Fritsch and R.A. Piccinini, Cellular structures in topology, Cambridge University
Press New York, 1990.
[Hat02]
A. Hatcher, Algebraic Topology, Cambridge University Press, 2002.
[May92] J.P. May, Simplicial Objects in Algebraic Topology, University Of Chicago Press, 1992.
[ML98]
S. Mac Lane, Categories for the Working Mathematician, second ed., Springer, 1998.
[Seg73]
G. Segal, Configuration-spaces and iterated loop-spaces, Inventiones Mathematicae 21
(1973), no. 3, 213–221.
[Ste67]
N.E. Steenrod, A convenient category of topological spaces, Michigan Math. J 14
(1967), no. 2, 133–152.
[WJR08] F. Waldhausen,
B. Jahren,
and J. Rognes,
Spaces of PL manifolds and categories of simple maps,
Submitted for publication,
http://folk.uio.no/rognes/papers/plmf.pdf (2008).
77