Finite Elements in Analysis and Design 1 (1985) 291-311 291 North-Holland
advertisement
 291-311 291 North-Holland")
Finite Elementsin Analysisand Design 1 (1985)291-311
North-Holland
291
INSTABILITY ANALYSIS O F SPACE T R U S S E S USING ENACT
TANGENT-STIFFNESS MATRICES*
K. TANAKA, K. K O N D O H and S.N. ATLURI
Center for the Advancement of Computational Mechanics. School of Civil Engineering. Georgia lnstume ol
Technology, Atlanta. GA 30332, U.S.A.
ReceivedSeptember 1985
Abstract. A simple(exact) expression for the tangent-stiffnessmatrix of a space truss undergoingarbitrarily large
deformation, as well as member buckling, is given. An arc-length method is used to solve the tangent-stiffness
equations in the post-bucklingrange of the structural deformation. Severalexamples to illustrate the viabilityof
the present approaches in analyzing large space structures, simply, efficiently,and accurately, are given.
Introduction
Currently, there is an enormous interest in deploying large structures in outerspace for a
variety of reasons. These structures are, in general, of very low mass and very high flexibility. A
pressing technical problem in the design of these structures is the need for active or passive
control of transient dynamic (traveling wave type) response. Since these structures are highly
flexible, there is the inherent need to account for large deformations. The transient dynamic
response equations for the space structure may be written as
¥ i i + C.~+ S ( d ) =/~ + Q~_,
(I)
where M is the mass matrix, C is the matrix of viscous damping which arises due to a delibrate
design of the structural joints, among other reasons, S is the vector of nodal restraining forces
which ct -nd nonlinearly on the vector of nodal displacements d, f~ is the vector of control
forces to o,, determined from a properly formulated feedback control strategy, Q~ is the vector
of externally applied dynamic nodal loads, and d and d are, respectively, the vectors of velocity
and acceleration. In transient dynamic response calculations, it is customary to linearize
equation (1) as
M (N+t)3+ C. (N+'iI+(N)~ Adf(N+i)l~ +(~+'QE -(~')R,
(2)
where, now, (ink is the so-called tangent-stiffness matrix at state N (or at time tN in a
time-integration scheme), Ad is the incremental displacement vector, and (N)R are internal
restraining forces at t~v.
In the usual finite element analysis, much of the effort is usually expended in evaluating the
tangent-stiffness matrix (re,K, which accounts for the effects of initial displacements and initial
stresses. Usually, one assumes basis functions and integrates over the element the appropriate
strain energy terms (that depend nonlinearly on the displacements) to obtain (inK. The
* The research reported here was supported by Air ForceWright Aeronautical Laboratoriesunder Contract No. SFRC
F33615-83-K-3205.
0168-874X/85/$3.30 © 1985, ElsevierScience Publishers B.V.(North-Holland)
K. Tanaka et al. / Instability analysis of space structures
292
objective of the present research is to obtain an explicit expression for (N)K for large space
structures, without the use of assumed element basis functions and element integrations. The
aim is to obtain analytical solutions to the appropriate nonlinear ordinary differential equations
and to use them to derive exact (closed form) expressions for stiffness matrices. It should be
noted that, while the concepts of tangent stiffness finite element me~'hod and arc-length solution
method were not used, several interesting analytical studies of stability of space-trusses were
earlier presented by Britvec [1].
Depending on the design of the joints, each member of a tree-dimensional (space) structure
may be considered as a 'truss' member or a 'frame' member. The truss member carries only an
axial force, and the kinematics of deformation is characterized by the three displacements of
each node. The frame member carries bending moments, a twisting moment, and lateral forces,
in addition to an axial force; and the deformation is characterized by the three displacements
and three rotations at each node.
The present paper is limited to a large deformation, post-buckling analysis of large space
trusses under quasi-static loading using explicit expressions for (N)K. Thus, in (2), d, d, f~ are
set to zero. The nonlinear tangent-stiffness equations are then solved by using an arc length
method. Several examples are given to illustrate the simplicity of the present approach which
renders the large deformation analysis of reasonably large-sized space trusses suitable for
currently available personal computers.
In the next section, a derivation of the tangent-stiffness matrix is given, the third (short)
section deals with a brief description of the arc length method, and the final section deals with
several examples.
Derivation of an explicit tangent-stiffness matrix for finite-deformation, post-buckling analysis of
space trusses
The space truss structures discussed herein are assumed to remain elastic. Al~o, only a
conservative system of concentrated loads at the nodes of the space truss structures is
considered.
Relation between stretch and axial force in a truss member
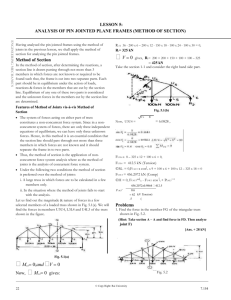
Consider a typical slender truss member spanning between nodes 1 and 2 as shown in Fig. 1.
This member is considered to have a uniform cross section, and its length before deformation is
I. The coordinates xl, x2, and x3 are the member's local coordinates, while u~, u2, and u3
denote the displacements at the centroidal axis of a member along the coordinate directions xl,
x2, and x3, respectively.
From the polar decomposition theorem, the relation between the total axial stretch and
displacements of the member is
2
+(1+
l,
(3)
where 8 is the total axial stretch, ~1 --2ul --I!i ~, ~2 --2u2 - l u 2 and 6 3 --2u 3 lu 3. Equation (3)
holds for both the pre- and post-buckled states of the member.
The incremental relation between the incremental total stretch and the incremental axial
force in the member is written as
AN= k.
(4)
If. Tanaka et al. / hlstability analysis @space structures
293
XS~ Us
Y/
2,
Before Deformation
Q
-N
~2t U2
/
N : Axial force
S : Total axial stretch
Fig. 1. Nomenclaturefor kinematicsof deformationof a spacetruss member.
where
AN : incremental axial force in the member,
A~ : increm~.ntal total axial stretch in the member,
k
= E A / i in the pre-buckled state,
= 4 2. E I / 2 1 ~ in the post-buckled state ( f o r the range @ d e f o r m a t i o n s
(5a)
considered),
(Sb)
E : Young's modulus,
A : cross sectional area of the member,
1 : moment of inertia.
Equation (Sa) simply follows from the linear-elastic (isotropic) stress-strain law of the
materiat of the member.i On the other hand, equation (Sb) for the post-buckled state of the
membei
lerived in Appendix A by simplifying and modifying the governing equations of the
problem ot the elastica, which is treated as a simply supported beam.
Here, one should note that N is in the direction of the straight line connecting node 1 and
node 2 of the member after its deformation (see Fig. 1), and 8 is calculated from equation (3).
Hence, equation (4) holds even when the rigid motion of the member is very large. Also, note
that the stiffness-coefficient k is a constant in each of the two states, such as pre-buckled and
post-buckled, of each member, of a space truss.
The condition for the buckling of a member, treated as a simply supported beam, is given by
the following well-known equation:
N ffierN,
(6)
where
cr N = _ ~ 2 E I / 1 2
(7)
the negative sign being used to denote the compressive axial force.
t
Whilethe materialis assumedto be linear-elasticin the present, the subsequentderivationsof the tangentstiffness
matrix remain valid, with straightforward modifications, even when the material stress-strain law is of a
Ramberg-Osgoodtype: o -- E~+ Ben.
294
K. Tanakaet al. / Instabilityanalysisof spacestructures
Tangent-stiffness matrix of a member for arbitrarily large deformation
The only force acting on a truss-member is considered to be the axial force. Hence, the strain
energy of the member, U, in either the pro- or post-buckled states of the member, is given by
U = ½fo' ( EA" e z + El" r 2) dx 3 = f0aN dS,
(8)
where e is the point-wise axial stretch, and tc the cu~ature, g = 0 for the pre-buckled state, and
4= 0 for the post-buckled state.
The incremental form of equation (8) is represented, using equation (4), as
AU= N. A8 = ½k(AS) 2.
(9)
The incremental form of equation (3) is given by
A8 ~a-Afi 1 + b . A ~ 2 + c.A~ 3
+2-~-[(b 2 +c2)'Afi~ + ( c 2 + a 2 ) . A f i l + ( a 2 +b2).Afi32]
1
i* [(a.b).Afi,Afi 2 +(b-c)Afi:Afi 3 +(c'a)Au3Afi,]
+ higher order terms,
(10)
where
~
l*=
a = ~1/1",
b = ~2/1",
x2] I/2
1 ,
e = (l + r~3)/l*,
Afi~, A~2, and A~3 represent the increments of ~ , i'tz, and i'~3 respectively.
Substituting equation (10) into equation (9), one finds that
'[ (bZ+c2).'~+k'a
N
2] A~
AU--N(a.A~, +b. Afi: +e.A~.~)+-~'
+2t
+a')'F+k'
N
+ higher order terms.
(11)
Furthermore, neglecting terms of higher than the second order, the variation in the incremental
strain-energy may he derived from equation (11) as
6(AU) = 6Aa,(N. a) + ~Aaz(N" b) + $Aa3(N. c)
+8,W,,{[(b' + c ,N)~- + k.aZ]A~l
+( k - ~--~) . a . b . Afi2 +( k - N ) . c . a "
+8Afi2{[(c2
+ a2)'~,+ k.b2]Afi2
.
N
A~a}
295
K. Tanaka et al. / Instabilio analysis of space structures
c. A~2)
_- SAd mT. Rm + #Ad mT•K m . Ad m,
02)
where
: vector of generalized nodal displacements,
R m : vector of internal forces,
K m : stiffness matrix of the element,
d m
AdmT= [AlUl; A2Ul; AlU2; A2U2; AIU3:A2U3],
C,[E] C,[E] C6[E]
R m-
(N'b)'{l}
,
Km-- Ca[E ]
C[E]
(N.c).{J}
N + k. a 2,
C~ = (b 2 + c 2 ) "F
=
-
C2[E ]
Cs[E]
,
Cs[E] c,[E]
.a.b,
N
C2= ( c2 -I- cl2).-~ + k . b 2,
C3 ~-(a2 + b 2 ) . N +
k.c2,
[El=[_
1
I]
(13)
One should note that equations (12) and (13) are written in the local coordinate s)stem, so
that it is necessary to transform the displacement vector from the local coordinate system to the
global coordinate system in the usual fashion.
It should be emphasized again that equations (12) and (13) (and, thus, the tangent-stiffness
matrix and the load vector) are applicable for both the pre- and post-buckled states of the
member, and that k has a constant value in each of the two states as given in equation (5).
Consequently, if a member buckles, it is only necessary for the value of k to be changed. In
view of this, it is seen to be very simple to derive the tangent-stiffness of the member, and, thus,
of the structure as a whole.
Solution strategy: Arc-length method
Although a number of solution procedures is available for nonlinear structural analysis, a
reliable approach to trace the structural response near limit points, and in post-buckling range,
is the 'arc-length' method [2,3,4]. This method is the incremental/iterative procedure which
represents a generalization of the displacement control approach. The arc-length method, in
which the Euclidian norm of the increment in the displacement and load space is adopted as the
prescribed increment, allows one to trace the equilibrium path beyond limit points such as in
snap-through and snap-back phenomena.
A full description of the presently adopted procedure is already given in [4] and will aot be
repeated here.
Example problems of space trusses
The first example considered in this category is the shallow geodesic dome shown in Fig. 2.
This structure, which exhibits a snap-through phenomenon, is subjected to one concentrated
296
K. Tanaka et al. / Instability analysis of space structures
Y
2
/?,,
15
211 / ~
12
, Xz
Xi
/
43.3 - - - - ~ L - -
F:ig. 2. Schematic of shallow geodesic
dome.
43,3em - ~
load at the central node. T w o initial configurations of the structure, one geometrically perfect
and the other with slight imperfections, as specified in Table 1, are considered. This example
was also analyzed, using a perturbation method, by Hangai and K a w a m a t a [6] to study global
stability. In the present study, however, the influence of member buckling on global stability is
also examined.
Figs. 3 and 4, for the case of perfect geometry, show a typical snap-through p h e n o m e n o n
wherein the first limit point is reached at a load of 3.15 × 10 -4 EA (Kg). The present results are
seen to be in good agreement With those of Hangai and K a w a m a t a [6].
Table 1
Coordinates of the nodes of example (1)
Node
(1) Perfect geometry
Xl
1
2
3
4
5
6
7
8
9
10
11
12
13
-
-
(2) Imperfect geometry
X2
0.0
25.0
12.5
12.5
25.0
12.5
12.5
43.30
0.0
43.30
43.30
0.0
43.30
-
-
-
0.0
0,0
21.65
21.65
0.0
21.65
21.65
25.0
50.0
25.0
25.0
50.0
25.0
X3
X3
0.0
2.0
2.0
2.0
2.0
2.0
2.0
8,216
8.216
8.216
8.216
8.216
8.216
0.0
1.8
2.0
2,0
1.8
2.0
2.0
8.216
8.216
8,216
8.216
8.216
8.216
K. Tanaka et al.
/ Instab#io' analysis of space structures
297
J
4.0
~.
Hangai's [6]
3.o
2
LO
o
,o "~i.~~o /~//
~b
L
d (cm]
oLO
\\
-=
=3.c~
/
,
Psr--2.75 \ ' ° ~ o ~
/
\..~...//
-4.q
Fig. 3. Vertical displacements of central node without the influence of local buckling of truss members.
The influence of member buckling on g!obal instability is illustrated in Figs. 5, 6, and 9
which indicate that a global behavior strongly depends on the buckling of a single member. In a
practical design of a three-dimensiona! truss structure, this understanding is very essential and
useful. Also, the effects of slight geometric imperfection are illustrated in Figs, 7 and 8, wherein
the comparison results of Hangai and Kawamata [6] are also included.
Example (2) is also that of a shallow geodesic dome, analyzed earlier by Noor and Peters [7]
and shown in Fig. 10. Two types of loading systems are considered: the first loading system
\
ul
\,/,.o
\
-6.o -4.o -3.0
"\. -i.o
/
_ / \ L "°"°o"~'~
"\
Present
i
/
~, ,,'o
-2.0
* Hangal's [6]
o Present
\
;o ~o
~0
d ( x 10.2 era)
~"o.
-4.0
°
Fig. 4. Horizontal radial displacements of non-central nodes without the influence of local buckling of truss members.
298
K. Tanaka et al. / Instability analysis of space structures
~5
.Z
,<
w
3
2
.A..,
I
l
,,
.....,,.<</I,
I
C
-I
Without Local Buckling
,
-2
It
d(cm)
-3
-4.
Fig. 5. Vertical displacements of central node with and without the influence of local buckling of truss members.
consists of lateral concentrated loads/)1 over the entire dome; the second one, /'2, consists of
concentrated lateral loads only over a quarter of the dome. An important difference between the
present analysis and that of Noor and Peters [7] should be mentioned. Noor and Peters [7]
ignore member buckling and assume each member of the truss to remain straight and stable. On
the other hand, in the present analysis, local buckling of each member is allowed; and only for
\
-
~5
Without Local Buckling
With Local Buckling
"--X -,.-,,.. x
\
(£X= 4.22 x ~04 k l l . ~ 2)
!
'
I
I
I
I
I
5
I
d (x 10"2cm)
-2 , % ~ . . o . o ~ /
-4
~
Fig. 6. Horizontal radial displacements of non-central nodes with and without the influence of local buckling of truss
members.
299
K. Tanaka et al. / Instabilily analysis of space structures
o_
!
x
<t
b.I 4.0
•
3.O
Hangai's
[63
Present
2.O
1.0
0
,
..
,.0
-I,0
~~
J,
,;
3.0 oj( f4/,/,7
,
5.0
dtcm)
-2.0
-~.0,
-4,0,
Fig. 7. Vertical displacements of central node under imperfect geometry without the influence of local buckling of truss
members.
comparison purposes, results are also obtained using the present procedure with local buckling
being intentionally suppressed.
Fig. 11 provides a comparison of the vertical displacement of the central node in the present
and Noor and Peters' solutions for various combinations of/'1 and /'2, when local (member)
buckling is ignored. The present results agree well with those of [7] except beyond the limit
~I
--~ Node
NodeBA ~" Ho.~oi'sr61
140
\
"\
\'~, .,~ ~,
A "]-Present
--6 Nccle
.oae . j
--o
l
J
d c,,~'cm)
-4.0
Node A, Imperfect Geometry Node
Fig. 8. Horizontal radial displacements of non-central nodes under imperfect geometry without the influence of local
buckling of truss members.
300
K Tanaka et aL / Instability analysis of space structures
\\
/
.2.41x,o 4
Fig. 9. Deformedconfigurationsof the geodesicdomeshownin Fig. 2.
point of/'1 = -5.132 x 10 -5. The stability boundary, i.e., the combinations load parameters P1
and/'2 which render the structure unstable when local member buckling is ignored, is shown in
Fig. 12. from which an excellent correlation of the present results (.with member-buckling being
suppressed) with those of [7] may also be noted.
Figs. 13 to 16 show the present results when local (member) buckling is considered. Fig. 13
shows the variation of vertical displacement of the central node; Fig. 14 shows the stability
boundary under the various combinations of Pl and P2, and Fig. 15 shows the equilibrium path
under the load system/'2 ffi 0 and P1 ~ 0.
From this numerical example (especially Fig. 14), it is clear that the decrease in the
magnitude of critical loads for the structure, due to buckling of an individual member or
members, i.e., the influence of local buckling on the response of the structure as a whole, is quite
remarkable.
The third example of space trusses is that of a beam-like space truss (PA¢oss Truss) subjected
to axial and bending loads. The structure is that of a twelve-bay truss whose member properties
K. Tanaka et al, / Instability analysis of space structures
t X2
301
o=6.0m
)m
~m
Equation of
X~ + ~
Loading
Surface
+ (×3+7.2)e.60.e4
System
Pl : Concentrctcd Load ,n X3
direction at all nodes
P2' Concentrated Load in X3
direction at nodes having XI_>O, X2-~0
Fig. 10. Schematic of shallow geodesic dome.
<[
bJ
-7.
s tO"s
Noor's Fult System [ 7
o
Preser~t
"8'
-..,
///?
0
.......
........
-tO
-20
-30
xlO "4
W/O
Fig. ll. Vertical displacements of central node under various combinations of loads, Pt and P2, without the influence
of local buckling of truss members.
are shown in Figs. 17 and 19. In order to trigger the coupling between the axial and transverse
displacements, which is characteristic of the buckling mode, in the case of only an axial-load
application, a 'load imperfection' equal to P/1000 is added in the transverse direction at one of
the end nodes, as shown in Fig. 17.
K. Tanaka et al. / Instability analysis of space structures
302
0
i
I
/
/
iI
I
J
I
I
/
/
!
,,I
7 I
I
1
/
/
~.~
;
o"
1
N
0
0
0
D
~'g
.~'~
0
o
9o_
0
?
~2
~,,~
~b
g=
I--'9
I~m
I
I
9g
_c
I
t
I
¢J
0
~°
/"
j" J
.-'-o
÷
.~
~-
¢,,i~
o~
K. Tanaka et ai. / Instability analysis of space structures
303
t
"4
0
"0
.c
~
o
-=
(D
,m
-
-
m
o
v3/b-~
,~=
":.
.m
~b
gg
b
O3
O3
m
...~,,. - - "
,*,,p+
,+
v'~,"~ .=d
,..
-,,p
.-,,
,+..
-,,p,
+
304
K. Tanaka et al. / Instability analysis of space structures
Fig. 16, Deformed configurations of the geodesic dome shown in Fig. 10.
For the above predominantly axial-load case, Fig. 18 shows the relation between the
magnitudes of the axial load and that of the transverse displacement at the loaded end, for two
scenarios: (i) when local (member) buckling is suppressed and each member is assumed to
remain straight and stable, and (ii) when each member is allowed to undergo local buckling. Fig.
18 clearly demonstrates the advantageous effect of controlling the local buckling deformations
of individual members and forcing them to remain straight and stable. This leads one to the
concept of active/passive control of member deformations.
Fig. 19 shows the scher~atic of the P^¢oss Truss subject to predominantly bending loads.
Fig. 20 shows the relation between the magnitudes of transverse (bending) load and transverse
displacement, respectively, once again for two scenarios: (i) when local member buckling is
suppressed, and (ii) when member buckling is allowed. Fig. 20 again demonstrates the beneficial
effects of control of deformations of each member. Fig. 21 shows a computer plot of the
deformed shape of the PAcoss Truss under bending loads.
It should be noted that in Figs. 18 and 20, the letter~ .4, B, C, etc. indicate the stages at
which the respective members, whose numbers are identified i~ Figs. 18 and 20 respectively,
undergo local buckling.
305
K. Tanaka et al. / Instabifity analysis o( spacestructures
P
MATERIAL PROPERTY
MEMBER
147 --t
DIAGONAL,BATTENS
El
IN;
7.08X].06 2,16X106
2.70x10s 6.43x104
1,65x108 2.20x108
EA LB
LONGERONS
r p.P40"
LB
SHORTLONGERONS
HORIZONTALDIA6ONAL 1,37x108 1,52x10 s
X
b
LO
/_
123_-.r
/
91.-~
728"
X
t/
XDU I
67 ~
°
/,J
3 5 .._x
6.,- t
,q
Fi5 17. Schematicof a twelve-bayspace truss under axial loads.
Closure
While simple methodologies for large deformation analyses of large space structures (LSS)
modeled as trusses are treated in this paper, similar methodologies for analyses of LSS modeled
as f r a m e s (with each member carrying three moments and three forces) are objects of a
forthcoming paper.
306
K. Tanaka et al, / Instabifity analysis of space structures
X3
p
Loading
lp
P PImp= P' 10"3(Ib)
x2
Xl ,U I
t
T UI without Local Buckling
I0
.~Q.O....O-- - O- . 0- - Q.
. . • . . --0
. . . •.
0- -o--
0
P
Q.
,=P
Buckled Members
A : 147
B :
55, 67, 9l, 123
C"
II
D:
6
E:
7
=
D
~ - U
5
0
t with Local Buckling
I0
15
UI (in)
Fig ] 8, Deflections at free end under axial loads with and without the influence of local buckling of truss members.
Appendix A. Post-buckling behavior of a truss m.,mber
In this appendix, equation (5b) for the post-buckled state of the truss member is derived.
Consider the truss member being subjected to the compressive force ( - N), as shown in Fig.
1. When N satisfies equation (6), this member undergoes bifurcation buckling. From the
detailed treatment of the elastica problem given in [8], the post-buckling behavior of the
member, treated as a simply-supported beam, is governed by the following equations:
1
l = ~ . F(fl),
(A.la)
2
t+8=7.E(~)-I,
(A.Ib)
2
ffi 7" fl'
(A.lc)
where
F(fl)
f2=
-
f_..',,
d~
~.~V/1_ f12 sin2~
N
El'
'
/~ = sin(½a),
E(/~) = f ~ ~/1 _~2 sin2~, d~,
J - - ~'r/
(A.2)
ffi - 0
K. Tanaka et aL / lnstabili0, analysis of space structures
307
40"
Ji¢" P
40""15~P'9-'-~-~-\
MATERIALPROPERTY
MEMBER
EA LB
LONGERONS
7.08x106
DIAGONAL,~ATTENS 2,70x10 s
SHORTLONGERONS 1,65xi0 e
HORIZONTALOIAGONAL 1,37x10 e
El LS, IN~
2,16x106
6.43xI0 '~
2,20xi08
1,52x10 s
!
13s -.~ "
,~
.,
/
i,
103< , X
I:
89
o
Od
"
e_
X
79
728"
~'
i
Xl,U I
/x
,
T 'q"
-----r----
/
47
ii
/
17
t6,
m
4
Fig. 19. Schematic of a twelve-bay space truss under bending loads.
and F(,0), E(~) are the elliptic integrals of the first and the second kind, respectively. Also,
is the stretch after the buckling of the member, and ~ is the lateral deflection at the middle of
the centroidal axis of the element. Note that the total stretch 6 is given by the sum of ~ and the
stretch, crN. I/EA, before the buckling of the member. Also, it should be noted that in the
derivation of equations (A.1), the change in the length of the member due to the compressive
force is neglected.
308
K. Tanaka et al. / lnstabifity analysis of space structures
Loading
l xa
1.0
p
x2
Buckled Members
XI+Ul
A
9, 23, 33,47,, 65,
79, 89,103,121,135,
I,~.5, 159
B
5,17
C
O
E
F
145 (recover)
121 {recover)
89 {recover)
8
89
121
16
145
0.8
r~
K
G
H
0.6
I
d
?
,'
,~
t S
¢
//
/
/
/s
?
0/
/
/
Q
/
fl
/
/
0.4
i
//
o
/' ~
i
/
. II
/
I
/
0r
t
¢1
0.2
'JI without Locol
Buckling
/
/
r
--Ui with Local
P
Buckling
i
H
,,I I / '
,io
I G,
,?
0
6
!
I
i
I
I0
20
50
40
O
30
60
70
UI (in)
Fig, 20. Deflection at free end under bending loads with and without the influence of local buckling of truss members.
Equations (A.1) give the exact relations between N, ~, and ~ in the post-buckled range,
except for the assumption concerning the length of the element. We now simplify and modify
these relations to a form more useful for the present purposes of evaluating a tangent-stiffness
matrix. To this end, we start by expanding F(/~), E(fl) in terms of ,8 (see [9]):
F(~)=~+ ½/~2.s 2 + t.
~ 3./~,.s++
...,
I .~4.$4+ "",
g(~)-- ~ - ½~. s2- ~-~
(A.aa)
(A.3b)
where
S. -- f~ ½~ sin"~ • d~.
(A.4)
We shall retain the terms of equations (A.3) up to the second order for the approximations of
F(~), E(/~):
F(fl) = ~ + ~t./~2,
E(fl)-- ~ - ¼'~.~2.
The range of validity of these approximations will be demonstrated momentarily.
(A.Sa)
(A.Sb)
K. Tanakaet ai. / Instabilityanalysisof space structures
P'-~
309
,,,,~.P
~'..'.!
....
•
X':: :
At State
E
p = 155,69
uI =
18,52
Ib
in
~'.-, /_:t
:
',: /
XI,IUI
t
I I
Fig. 21. Deformed conf~,gurations of a twelve.bay space truss shown in Fig, 17.
Then, equations (A.la) and (A.lb), respectively, become
(A.6a)
(A,6b)
310
K. Tanakaet a L / lnstabilio, analysis of space structures
From equations (A.6) one obtains
4
41 + 8 = 7 " ~r.
(A.7)
Noting that f2 = ( _ N / E 1 ) , one sees from equation (A.7),
1
N = N (cr) (1 + S / ( 4 I ) ) 2)
(A.8)
where N (or) is the critical axial ferce for bifurcation buckling as given in equation (7).
For small values of - ( 8 / I ) , equation (A.8) may be approximated as
N -- N(cr)[1 - ½(S/l)].
(A.9)
The incremental form of equation (A.9) results in equations (5). The linear relation (A.9), and
its incremental counte,'parts, are useful in tangent-stiffness evaluations.
We now derive the relation between S and 8. This relation is not necessary for the
construction of the tangent stiffness, but it is useful for the determination of maximum a n d / o r
minimum stress in each of the members.
Noting that/} is nonnegative except for a > 2,n, one obtains from equation (A.6a)
/
f l = 2 1 / 1 . f - 2 - 1.
¥
(A.10)
'IT
Substituting equation (A.10) into equation (A.lc), it is seen that
N/ch
l,IS
I,I0
LOS
1.00
0,95
E xoct
0,90
.....
I
O, Oq
0,05
I
.
0.10
._
Present
l
0,15
!
0.20
i
0.25
Fig. A.I. Axial stretches and lateral deflections (at the center of the span of the
member) in the post-buckledrange under
an axial force.
K, Tanaka et al. / Instability analysis of space structures
311
Substituting for f in terms of N and using equation (A.8), the following relation between 8 and
S is obtained:
7=~"
-~
1+~-~
.
(A.12)
Thus, when the axial contraction 8 is solved from the finite element stiffness equation, equation
(A.12) may be used to calculate the transverse displacement 8 at midspan of the member; and
from it, one may calculate the maximum or minimum stress in the member.
Fig, A.1 shows the relations between N, 8, and S as given by equations (A.9) and (A.12) and
their comparisons with the exact solutions for the elastica problem. The dashed lines indicate
the present solutions and the solid ones indicate the exact ones. From this figure it is seen that
equations (A.9) and (A.12) are good approximations in the range of values for - ( 8 / I ) and
( 8 / ! ) being smaller than about 0.15 and 0.25, respectively. It is also seen that this range of
values for - ( S / i ) and ( 8 / ! ) is typical in the problem of local (member buckling in a practical
truss structure.
Acknowledgment
The encouragement of Dr. N.S. Khot is sincerely appreciated. The as~istan,:e of Ms. J, Webb
in the preparation of the manuscript is thankfully acknowledged.
References
[1] BRI'I'VEC,S.J., The Stability of Elastic Systems, Pergamon,Oxford. 1973.
[2] CRISFIELD,M.A., "An arc-length method including line searches and acceleration", Inter)~at. J, Numer. Meths,
Engrg. 19, pp. 1269-1289, 1983.
[3] Rigs, E., "An incremental approach to the solution of snapping and buckling problems", Internal. J. Solids &
Structures I$. pp. 529-551, 1979.
[4] WEMPNER,G.A., "Discrete approximationsrelated to nonlinear theories of solids", bnernat. J. Solids & Structures
7, pp. 1581-1599, 1971.
[5] KONDOH,K. and S.N. ATLUnl,"Influence of local buckling on global instability: Simplified, large deformation,
post.buckling analysesof plane trusses", Computers & Structures, in press.
[61 HANO^I, Y, and S. KAWAMATA,"Perturbation method in the analysis of geometrically nonlinear and stability
problems", in: Advancement in Computational Methods in Structural Mechanic.v and Design, edited by J.T. ODEN,
R.W. CLOUOHand Y. YAMAMOTO,UAH Press, Huntsville,AL, pp. 473-489, 1972.
[7] Noon, A.K. and J.M. Pl','Ti~,nS,"Instability analysisof space trusses", Comput. Meths. AppL Mecb, & Engrg. 40, pp.
199-218, 1983.
[8] TIMOSHENKO.S.P. and J.M. GERE, Theory of Elastic StabiliO', 2nd ed., McGraw-Hill,New York, pp. 76-82, 1961.
[9] BYRd,R.F. and M.D. FRIEDMAN,Handbook of Elliptic Integrals for Engineers and Scientists, Springer, Berlin, 1971,