Computational Mechanics Computational studies on path independent integrals for non-linear dynamic crack problems*
advertisement

Computational
Mechanics
Computational Mechanics(1988) 3,331-342
© Springer-Verlag 1988
Computational studies on path independent integrals
for non-linear dynamic crack problems*
T, Nishioka and M. Kobashi
Department of Ocean MechanicalEngineering,Kobe Universityof Mercantile Marine, Higashinada-ku,Kobe, 658, Japan
S.N. Atluri
Center for the Advancementof ComputationalMechanics, Georgia Institute of Technology,Atlanta, GA, 30332, USA
Abstract. Recently the authors have derived various new types of path independent integrals in which the theoretical
limitations of the so-called J integralare overcome.First, for elastodynamiccrack problems, a path independentintegralJ'
which has the physicalmeaningof energyrelease rate was derived. Later, more general forms of path independentintegrals
T* and T were derived, which are valid for any constitutiverelation under quasi-static as well as dynamicconditions.
This paper presents the theoretical and computational aspects of these integrals, of relevance in non-linear dynamic
fracture mechanics. An efficientsolutiontechniqueis also presented for non-linear dynamicfinite elementmethod in which
a factorizationof the assembled stiffnessmatrix is done only once throughout the computationfor a given mesh pattern.
Finite element analyses were carried out for an example problem of a center-cracked plate subject to a uniaxial impact
loading. The material behavior was modeled by three differentconstitutiverelations such as linear-elastic, elastic-plastic,
elastic-viscoplasticcases. The applicabilityof the T~integralto non-lineardynamicfracture mechanicswas shown with the
numerical results.
i
1 Introduction
In order tO assure the safety against dynamic fracture in large structures such as nuclear pressure
vessels, offshore oil production platforms, etc., the establishment of non-linear dynamic fracture
mechanics is essential. The subject of the mechanics of non-linear dynamic fracture can be broadly
described as that of mechanics of non-linear materials, containing stationary or propagating cracks,
wherein the effects of material inertia and stress wave interactions play significant roles. Computational methods are mandatory to analyze the problems of non-linear dynamic fracture mechanics.
On the other hand, the so-called J integral has played an important role in the enormous strides
that have been made in almost two decades in the subject of the mechanics of fracture. However it
is now well understood that the J integral is valid theoretically, 0nly in the context of incipient crack
growth in (non-linear) static materials under quasi-static conditions, ~
Recently the authors have derived various new types of path independent integrals in which the
theoretical limitations of the so-called J integral are overcome. First, for eIastodynamic crack
problems, Nishioka and Atluri (1983 a) have derived a path independent integral J ' which has the
physical meaning of the energy release rate. More recently Atluri, Nishioka and Nakagaki (1984)
have derived general path independent integrals T* and T which are valid for any material-constitutive model under quasi-static as well as dynamic conditions.
In this paper, the theoretical and computational aspects of these integrals, of relevance in nonlinear dynamic fracture mechanics are presented. An efficient solution technique is also presented
for non-linear dynamic finite element method in which a factorization of the assembled stiffness
matrix is done only once throughout the computation for a fixed mesh pattern. Finite element
analyses are carried out for the problem of a stationary crack subject to stress wave loading. The
material behavior is modeled by three different constitutive relations such as linear-elastic, elastic* This study was supported by the Grant-in-Aidfor ScientificResearch from the Japanese Ministryof Education, and in
part by the Scienceand TechnologyGrant from Toray ScienceFoundation
Computational Mechanics 3 (1988)
332
viscoplastic, and rate independent elastic-plastic cases. The feasibility of T* integral as a fracture
parameter for incipient crack growth in non-linear materials under dynamic loading, is also presented
with the numerical results.
2 Path independent integral for elastodynamic fracture mechanics
We first consider dynamic crack propagation with an instantaneous crack velocity C (t) in a linear
elastic material as shown in Fig. 1. We employ a local coordinate system x k attached to the
propagating crack-tip such that xl is always locally tangential to the crack plane. We also use a
fixed (global) coordinate system Xk (Fig. 1).
For a crack propagating in a self-similar fashion at an angle 00 measured from the global X1
axis as shown in Fig. 1, the energy release rate G can be expressed as (Atluri 1982):
G = (Ck/C)Gk = Glcos00 + G2sin00
(1)
and
Gk = lira ~ [(W + K) n k - ti ui,k] dS
(2)
F~0/'~
where C k and G k are the components of crack velocity and energy release rate with respect to the
global coordinates Zk; W and K are the strain and kinetic energy densities, respectively; nk the
outward normal direction cosines; ti the traction; ( ),k denotes ~ ( )/~Xk.
The components of the path independent integral which are equivalent to the components of
energy release rate were derived by Nishioka and Atluri (1983 a):
J ; ~ lim j' [(W + K ) n k - - tiui, k]dS
F~O F~
= lira ( ~
[(W + K)n k -tiui, k]dS +
F~--,O IF+Fc
~
[~iiiui, k - ~iliiti, k]dS l
Vr- V~
(3)
)
where ff is the mass density. A superposed dot denotes a total derivative with respect to time t. F is
an arbitrary far-field path which starts at the lower surface of the crack and ends at the upper
surface. The path independence of the far-field expression in Eq. (3) can be easily shown using the
divergence theorem, equilibrium equation and other basic equations. The body forces f- other than
inertia forces can be easily included replacing ~i//i by (~//i -f~). For elastostatic crack problems, the
J; integral reduces to the Jk integral derived by Budiansky and Rice (1973). However, it should be
noted that the definition of J2 in their paper does not involve the crack-face integral, which accounts
for discontinuities of W between the crack-faces. Thus, the original expression of ,/2 integral is not
n
x2~.
r
v
Fig. 1. Nomenclature for a crack body
T. Nishiokaet al.: Computationalstudies on path independentintegrals
333
path independent. The aforementioned expression can be regarded as the X k components of the
vector integral J' emanating from the crack-tip. Thus, the following ordinary coordinate transformation rule holds (Nishioka and Atluri 1984a) for the J; integral:
j~0 = ~ktJ~
or
J~ = ~lkJ~°
(4)
where, for a two-dimensional case, all = ~22 = C O S 0 0 ; ~12 = - - ~ 2 1 = sin00. The superscript "0" in
( )0 denotes the tensor components with respect to the local coordinates xk attached to the cracktip.
Substituting the singular stress and corresponding displacement fields for an elastodynamically
propagating crack, the relations between the components of J~ integral and the instantaneous stress
intensity factors can be expressed as (Nishioka and Atluri 1983 a):
j~o = G o = ~
j,2o = GO _
1{
A I ( C ) K 2 + AII(C)K~ I + AIII(C)K2II
}
(5)
(6)
A I v ( C ) K~KH
#
where # is the shear modulus. The detail expressions for the crack-velocity functions (AM(C);
M = I ~ IV) are given in (Nishioka and Atluri 1983 a).
The practicality of the J' integral was demonstrated in (Nishioka and Atluri 1983b) for the
analysis of dynamic crack propagation using a moving singular element procedure (Nishioka and
Atluri 1980) in which the singularities in the strain and kinetic energy densities for a propagating
crack-tip were correctly incorporated. The numerical results clearly show theoretically predicted
differences between the J' integral and other path independent integrals (Kishiomoto, Aoki and
Sakata 1980; Atluri 1982) which have the meaning of energy release rate only for stationary cracks.
Although the moving singular element procedure gives highly accurate solutions, especially for
detailed stress distribution near the propagating crack-tip, this procedure may be difficult to be
applied by general users of finite element method because of its sophistication. From this point of
view, studies (Nishioka and Atluri 1984 b; Nishioka, Fujihara and Yagami 1986) were undertaken
to use the J' integral with less sophisticated finite element models which have no singularities in the
strain and kinetic energy densities. The combined use of the J' integral and the moving isoparametric
element procedure was shown to be an effective tool for the evaluation of the crack-tip parameters
such as the stress intensity factors as well as energy release rates.
3 Path independent integrals for non-linear dynamic fracture mechanics
We now consider dynamic crack problems in elastic-plastic and elastic-viscoplastic materials. Under
an incremental flow theory of plasticity, it is natural to consider an incremental parameter to serve
as an incremental measure of the strength of the crack-tip field. Based on this idea, Atluri, Nishioka
and Nakagaki (1984) have derived a general form of path independent integral T* which is valid
for any material-constitutive relation under quasi-static as well as dynamic conditions. The T*
integral can be written as:
t
(7)
T*k -- ~ T k d t = Z A T ~
0
AT; - j" [(AW+ A K ) n k - (ti + Ati)Aui, k - Atiui, k]dS
Fe
=S
[(AW+ A K ) n k - (ti + Ati)AUi, k - Atiui,/jdS
F+Fc
v r - v,
2
],k
\
2
J,~
-}- O~(l~i -Jr- ml~ii) Aui, k -- ~ (lfli At- A{li) ml~li,k -]- okmuibli, k -- ~ mlfli~li, k] d V
(8)
334
Computational Mechanics 3 (1988)
1
where ~ denotes the summation along the loading history; A W = (Aaij + ~ Aaq)Aeij is the incremental stress working density; aij and e0 are the stress and strain, respectively.
Atluri, Nishioka and Nakagaki (1984) have also derived another type of path independent
integral which is related to the total potential energy difference due to a unit crack extension. This
integral is defined by the exterior surface of the cracked specimen S as follows:
t
Tk - ~ T k d t = E A T
k
(9)
o
ATk = ~[(AW+ A K ) n k - (t i + Ati)Aui, k - AtiUi, k]dS
s
j" [(AW+ A K ) n k - (t i + Ati)Aui, k - Atiui, k]dS
r+r~
+
S [agij
V- Vr
ffij AV ~ affij
-- Aaij
/,k
F,ij -Jc ~ Agij
/,k
+ e(ui + Afli) Afli, k -- ~(ii i + Aiii) AUi, k + OAftiUi, k -- oAiiiUi,k]dV
(lO)
The path independence of the T* and T integrals can be easily shown without using a constitutive
relation. Thus, both the T* and T integrals are valid for any constitutive model.
We can also describe the path independent integrals without using incremental representations
as follows:
T* - ~ [(W + K) nk -- ti bli,k] dS
F~
= [, [(w+x),
-tiuiA a s +
r+G
S [ ij i , -W +eaiui, k-e i i, ldV
(11)
V r - V.
and
T - ~[(W+ IOnk - tiui,kldS
s
=
~ [(W+K)nk-
tiUi,k ] d S +
~ [W,k--aijeij, k+Qftifti, k--OiiiUi, k]dV
(12)
V- Vr
r+Fe
Note that in an elastic-plastic material under arbitrary loading history, W is the total accumulated
increments of stress working density. Since aij is not a single-valued function of eij, in general, we
have W k ~ aijg, ij,k.
We now explore the relations among the integrals in some special cases. It can be shown that,
for elastodynamic problems,
G = J i # Tk
(13)
and for elastostatic problems,
Tk = Tk = J~
ark
(14)
where Jk is derived by Budiansky and Rice (1973) for elastostatic crack problems. For elastic-plastic
or elastic-viscoplastic materials under a static condition, in general, we have T~ # Tk ¢- Jk. However,
under the condition of proportional (monotonic) loading, when a deformation theory of plasticity
(or effectively a non-linear theory of elasticity) may be valid, we have the same relations expressed
in Eq. (14).
When a solid is subjected to nonuniform temperature fields, and when the material is considered
to be nonhomogeneous, J' and T* integrals can be easily modified as presented in (Atluri, Nakagaki,
Nishioka and Kuang 1986).
T. Nishiokaet al.: Computationalstudies on path independentintegrals
335
4 Non-linear dynamic finite element method
In order to analyze non-linear dynamic fracture problems, a non-linear dynamic finite element
method is developed based on the following elastic-viscoplastic constitutive model.
4.1 Viscoplastic constitutive model
In the usual manner for non-linear inelastic analyses, it is assumed that tht total strain rate can be
separated into elastic and viscoplastic components,
• = eij
'e "~- 8ij
.vv
8ij
(15)
A yield condition which governs the initation of viscoplastic flow is given in the form
f ( a v , eTf) =f0
(16)
wherefis a scalar yield function and f0 is the uniaxial yield stress which may also be a function of
some hardening parameter. It is assumed that continuous viscoplastic flow occurs only when f > f0.
The rate of viscoplastic strain is defined by the normality relation (Perzyna 1963)
~}f =
{
(f)
f > fo
(17)
O,
f<-fo
where ~ is the fluidity parameter controlling the viscoplastic flow rate. For the flow rate function
05, we employ a power law type in the form introduced by Bodner and Symonds (1962) which is an
appropriate choice for many metals:
where n is a material constant to be determined by experiments.
In the case of one-dimension (uni-axial case), the above constitutive relation expressed by Eqs.
(17) and (18) reduces to
gvv = 7 [a/ast@p) -- 1]n
(19)
or inversely
G = £rst@p ) [1 + (~vp/~) l/n]
(20)
where a,t (gp) is the static stress-strain relation including the effect of strain-hardening. In the special
cases for 7 = 0 and y = ~ , the above constitutive relation represents, respectively, the elastic and
(rate-independent) elastic-plastic models.
4.2 Finite element modeling
The principle of virtual work governing the motion of solid at any instant of time is given by
[ar6g + 0ti'r6uldV - ~ i'r6udS = 0
V
(21)
St
in which, for convenience, the stress and strain are expressed in vector forms using the bold letters;
St is the portion of external boundary of the solid where the traction is prescribed; (-) denotes a
prescribed quantity• It is assumed in Eq. (21) that the body forces are not acting in the solid.
The domain to be analyzed is divided into eight-noded isoparametric elements. Then the field
variables in each element are approximated by
u = Nq,
ti = N q ,
~ = N¢
(22)
336
Computational Mechanics 3 (1988)
where N is the matrix of shape functions and q is the vector of nodal displacements. Then, the strain
can be expressed by
= Bq
(23)
Using Eqs. (22) and (23) in Eq. (21), we obtain the equations of equilibrium to be satisfied at any
instant of time t:
~ B r * d V + Mq" = Qt
v
::
(24)
where M is the consistent mass matrix and Qt is the vector of equivalent nodal forces due to applied
tractions.
Now we use an incremental formulation in conjunction with Newmark's time-integration
method. During a time increments At, the stress ~r and the nodal accelerations ~/are assumed to
vary in such that
o- = o'0 + At- ,
il'=blAq-b3Oo-b4(~o
(25)
where ( )0 denotes quantities at the previous time-step. Newmark's parameters are given by
bl = 1/ (flAt2), b3 = 1/(flAt), b 4 = 1/(2/3) - 1. This scheme becomes unconditionally stable when
fl = 1/4 is used.
Substituting Eqs. (25 a and b) in Eq. (24), we obtain
~BrA~rdV+ blMAq = Q*
(26)
v
where
Q* = Qt + M(b3qo + b4~/o) - ~ B r o o d V
(27)
v
The increment of stress A6 can be expressed by
At" = DeAr e = De(A~ - Atop) = DeBA q - DeAg~p
(28)
where De is the elasticity matrix. Using Eq. (28), Eq. (26) can be rewritten as
(29)
(K e + b l M) Aq = Q* + Ovp
where
Ke = SBTDeBdV,
O~p = SBrDeAtvp dV
v
(30)
v
Since, Qvv is a function of the solution Aq in the current time-step, i.e., Q~p = Q,p(Aq), a set of
finite element equations given by Eq. (29) should be solved in an iterative manner. To this end, we
employ the following iteration process. For any i-th iteration, we solve
K*eAqi = Q* + Qi~l (Aqi-1)
(31)
in which Q 0 = 0 is used as a starting value. It should be noted that K~(= K e + blM) is the
generalized elastic stiffness matrix and remains the same throughout the computation for a fixed
mesh pattern. An efficient equation solver O P T B L O K developed by M o n d k a r and Powell (1974)
is used to save computation time in solving a set of the non-linear finite element equations, Eq. (31).
The solution algorithm can be devided into three parts, i.e. (i) reduction of stiffness matrix, (ii)
reduction of load vector, and (iii) back substitution. In OPTBLOK, the reduction of stiffness matrix
is done only once throughout the computation, although the reduction of load vector and back
substitution may be repeated for any number of both the time-steps and the iteration processes. A
great amount of computational time can be expected to be saved by comparing with the case in
which a set of non-linear finite element equations is solved for each time-step and iteration process.
To illustrate this situation, we consider the example given in (Mondkar and Powell 1974). For a set
of linear equations with the number of equations of 1960, and half band width of 200, the CPU time
337
T. Nishioka et al.: Computational studies on path independent integrals
for reduction of load vector and back substitution was about 5.6% of the total CPU time including
the reduction of stiffness matrix.
Efficiency of the present solution technique may be comparable to that of the explicit-timeintegration scheme in conjunction with the lumped diagonal mass matrix which requires no factorization of stiffness matrix. Moreover the present solution technique has the following advantages over
the explicit-time-integration, i.e., (i) the explicit-time-integration scheme requires a smaller timestep than that required in the present implicit-method, (ii) the present technique can be also used in
static non-linear problems, and (iii) the lumped diagonal mass matrix is not energy consistent and
sometimes causes spurious motions.
5 Numerical analyses of a stationally crack subject to stress wave loading
We consider the problem of a center-cracked plate subject to a uniaxial tensile pulse of Heaviside
step-function type, as illustrated in Fig. 2, wherein the properties of the material are also indicated.
The plane strain condition is assumed for two dimensional analysis. In a linear-elastic case, this
problem is analogous to those treated analytically by Baker (1962); Sih, Embley and Ravera (1972);
Thau and Lu (1971). In the present study, the problem is analyzed for three types of material
behavior; i.e., linear-elastic (7 = 0), elastic-viscoplastic (? = 100 and 500), and rate-independent
~o #)
Ii1111111111
I
E=75.52GPo
Q=Z450 kg/m3
v = 0286
~s=151.2 MPo
H'=O
1;1;I11!1111
o"o (t)
0"o/%=0 (Etostic)
. O'o/~:0 Z5]
•
= i5. l
•
52rnm
5.0
E
E
I
Palh.no. I
Z
I
3
l
~--12 m m ~
~mD#J
. Numericol
1
op
-- Theoretical
/@'
/
I 4-.08
~- 3.08
2.01.0.
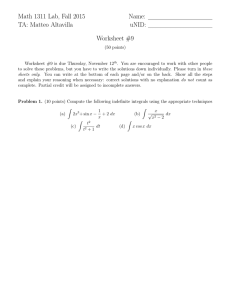
Figs. 3 and 4.3 Finite element mesh and contour integral
paths. 4 Time-variation of J' or T* integral for the
elastic case
[Dm3c)I
(Eiostic)
6.0-
-i
I::l
Fig. 2. A center-cracked plate subject to stress
wave loading
0
Jf, - ,
Z
4
t
6
-
8
10 p.s
Computational Mechanics 3 (1988)
338
elastic-plastic (7 = ec) materials, and for three values of the ratio of the applied stress (a0) to the
yield stress (c%):aO/ay ~ = 0.0; 0.25;0.5. Thus, the case of o-0/%s = 0.0 also corresponds to linear
elasticity. In the present study no strain-hardening was assumed together with a linear flow rate
function with the exponent n = 1 in Eq. (18). The symmetries of geometry and loading allow one
to analyze only a quarter of the plate, which is modeled by eight-noded isoparametric elements as
shown in Fig. 3. Four contour paths to evaluate the integrals, are considered as shown in Fig. 3.
The variation of T* integral for the elastic case (or equivalently J ' integral) is shown in Fig. 4.
In the present paper all the results for T* integral were normalized by the static J value for the same
size of crack in an infinite plate, Joo = (~ + 1)o-2rca/8 #; ~ = 3 - 4 v for plane strain; v Poisson's ratio.
The nomenclatures (Dm), (DmDc), etc. in Fig. 4 indicate the time of arrival of various elastic waves
at the crack-tip, as explained in (Nishioka and Atluri 1980 b). For example, (a) Dm is the time taken
by the dilatational waves to travel the distance from the boundary, where impact loads are applied,
to the crack-tip. (b) DmDc, D mS c and Dm Rc are, respectively, equal to Dm plus the time taken by the
first scattered dilatational, shear, and Raleigh waves to reach from one crack-tip to the other. (c)
DmD m is the time taken by the dilatational waves to travel the length of the specimen, reflected from
the boundary surface on the opposite land return back to the crack-tip. Numerically obtained values
of T* Or J ' integral agree excellently with the theoretical solution obtained by Baker (1962) until
the time (Dm Dc) When the analytical Solution becomes no longer valid. Since, as obtained by Baker
(1962); the stress intensity factor in this case varies with KI = D o"0 ] / t - to (i n which D is a coefficient
depending material properties a n d tO is equal to the time Din), the variation of J ' or T* integral can
be expressed by J ' = D' o-2(t - to) which is linear in time.
The computed shapes of plastic zones at various instants of time are shown in Figs. 5 and 6 for
rate-independent elastic-plastic casesi(? = co) with ao/ay~ = 0.25 and 0.5, respectively. It is emphasized that, for the Case of a0/o-y~ = 0 . 5 at t = 10 gsec, the plastic zones exist between paths no. 1 and
no. 2, and paths no. 3 and no. 4. Almost the same shapes of plastic zones were observed in the
elastic-viscoplastic vases with 7 = 100 and 500.
In Fig. 7, the values of T* integral for the cases of ao/ay~ = 0.5 with different values of 7 were
plotted against the path number. The independence of T* integral can be seen for all the material
types, i. e., linear-elastic (7 = 0), elastic-plastic (7 = 100 and 500), and rate-independent elastic-plastic
(7 = co) cases. As seen from the figure, the T* integrals at t = 10 gsec for all the cases oscillate
similarly. This is due to the fact that, at 10 gsec, various elastic waves pass through the crack-tip as
indicated in Fig. 4. To eliminate this effect on the far-field T* integral, we have to use more refined
meshes between the integration paths (Fig. 3). Therefore, it may be concluded that the plastic zones
between integration paths do not disturb the path independence of the T* integral.
/ 1 0 p.s
8Fs
Fig. 5. Development of plastic zones under the
lower magnitude of stress wave
(7 = co, Go/C% = 0.25)
f/ / j
( ~ ~s
7<<_ 5
10 FS
. . . . 1(]liS
.
.
.
.
.
.
.
.
.
.
.
\ /
Fig. 6. Development of plastic zones under the
higher magnitude of stress wave
Path. no.
2
(7 = oc, C~o/%~= 0.5)
339
T. Nishioka et al.: Computational studies on path independent integrals
6.0
(Elaslc)
? =0
(Plastic)
(Viscoptastic)
~'=500
(V]scoptastic)
2, =100
~=oo
o
5.0
o
e
o
Q
o
I 4.08
o 10 p,s
0
0
0
3.0-
o 8p,s
8 Z.O
-,,.q
1.0
f~
o IFs
o
e
~
Path
o
no.
. . . .
e
Path
no.
Path
4Fs
Path no.
no.
Fig. 7. Path-(in)dependence of T* integrals in different materials (cr0/cry~ = 0.5)
(&&)
(&So) 1
6.0-
(D=R3
(Plastic)
(Z)mD=)~
(Viscoptostic)
6.0.
,, ?=100
yfl500
'~ =oo
/ Elastic (?=0)
5.0"
5,0"'
4.O
(D~&)
,
I ;':'d
3.0.
~ ~/~=0.5
l
~x
~.0-
(z?m0c)
8 3.0-
~'/
/e
,'~ ®
g.
o//
,~.,
Etastopiastic
(?=oo)
o,o~
° °
;;' ½'
:5
2.0-
y
1O-
(©m) , , ~
,4,
0, ~c,~,s~_,,t,cs s ~ ,
Z
4
1
6
8
I0 bs
Or
12
0
9
~ e e ~ / ~
2
,
~
~
z~
6
8
t'
t
,
10 Fs I2
,~
Figs. 8 and 9. 8 Influence of the stress wave magnitude on T* integral (7 = oo). 9 Influence of the fluidity parameter 7 on T*
integral (aO/Gy== 0.5)
The variation of T* integral with time for the elastic-plastic cases (7 = oc, ao/Gv= = 0.25 and 0.5)
are shown in Fig. 8. It is seen that the strenght of the crack-tip field, i.e., the T*'integral becomes
lower for the larger size of plastic deformation around the crack-tip. The variations of T* integrals
with time for the viscoplastic cases ofv = 100 and 500 are shown in Fig. 9 and compared with elastic
(7 = 0) and elastic-plastic (7 = oo) cases. It is seen that, as the value of Y increases, the viscoplastic
solution approaches the elastic-plastic solution, as can be predicted from the constitutive relations
explained in Sect. 4.1.
For the purpose of comparison, the variations of the T integral which is a measure of global
behavior of cracked body are shown in Fig. 10 for the elastic and elastic-plastic cases. The arrow
in the figure indecates the time when the shock (dilatational) waves reach the opposite loading edges.
Until this time, the T integrals for both the cases vary gradually, and then increase drastically. A
little influence of the fluidity parameter 7 on the T integral can be seen in the figure. The path
independence of T integral can be seen in Fig. 11. The oscillations of T integrals at t = 10 gsec have
the same tendencies that observed in the T* integrals (Fig. 7). Thus, this is also attributed to the
existence of various reflection waves in the plate at t = 10 gsec. For the static elastic-plastic case
studied by Brust, Nishioka, Atluri and Nakagaki (1985), the T integral correlates well with exper-
340
Computational Mechanics 3 (1988)
(Elastic)
y=O
5.0 ¸
4.04
OAA
l
°
o oA
3.0
(Plastic) T:oo
'~=oo
4.0
%
o (Elastic) 'y=O
(Plastic)
~
@
0¸
3.0
10 i~s
o
I8 Z.O-
2.0-
1.0-
l
0,3
1.0
~0
°o
1 ~
"F
i
I
2
4
6
i
f
0
lO s
=-
1
10
2
?
t
,
~
3
4
1
2
Path no.
11
? 41*s
3
4
Path no.
Figs. 10 and 11.10 Time-variations of Tintegral for the elastic and elastic-plastic cases (a0/~ry, = 0.5). 11 Path-(in)dependence
of T integral in different materials (a0/ay ~ = 0.5)
6.0
(Elastic)
at x~ =11.5n]n]
5.0
®o
I
(Plastic)
4.0
G
8
3.00 0 OO~
b~
0
8
_~ z.0-
1.0-
/S
~/
"(;77oo) = (5/&o) z
1.0
2.0
6/&o
3.0
I
I
I
I
1.0
2.0
3.0
4.0
-
[Plastic)
(Elastic)
if=O
0.08
Fig. 12. Relations between T* integral
and the crack opening displacement for
the elastic and elastic-plastic cases
(%/~ys = 0.5)
'}':oo
0.08
inn)
mm.
0.06
0.05
[ 0041
------e
~
0.02.
?
o"
0.02~,
~
4
o
x~
,~
8
mm
1Z
0 7d
0
E
I
4
8
X1 ,
mrn
12
~,,
Fig. 13. Crack opening profiles in the elastic and elastic-plastic materials under the stress wave loading (oy, = 0.5)
T. Nishioka et al.: Computational studies on path independent integrals
341
imental J integral formulas which are basically evaluated by the load versus load line displacement
record. However the T integral cannot be a good candidate for fracture parameter since it does not
describe the event occuring at the crack-tip as illustrated in Fig. 10.
Figure 12 shows the relations between T* integral and crack opening displacement 6, for the
elastic and elastic-plastic cases. The crack opening displacements 8 were evaluated at the nearest
node behind the crack-tip. The J ' or T* integral for the elastic case varies quadratically with respect
to 3. This can be easily recognized by the fact that the relations J ' ~- K 2 and K1 -~ ~ hold for the
elastic case. On the other hand, the T* integral for the elastic-plasticcase with no strain-hardening
varies linearly with 3. This suggests that, for low strain-hardening materials, the possibility of post
mortem examinations of stretch zone width to find the fracture initiation toughness in terms of the
T* integral.
The crack-surface deformation profiles at various instants of time for the elastic and elasticplastic (~ = oe, a0/o-y~ = 0.5) cases are shown in Fig. 13. Plastic hinge effect can be seen due to the
development of relatively large plastic zone around the crack-tip. This is the reason why the T* vs.
6 curve for the elastic-perfectly plastic material shows the linear relation as depicted in Fig. 12.
6 Conclusions
In this paper, we have presented the theoretical and computational aspects of the path independent
integrals in non-linear dynamic fracture mechanics. We have also presented a non-linear dynamic
finite element method using an elastic-viscoplastic constitutive model. This solution procedure is
very efficient since it requires the factorization of assembled stiffness matrix only once throughout
the computation for a fixed mesh pattern. Finite element analyses of a stationary crack subject to
stress wave loading were carries out for three types of material behavior, i.e., linear-elastic, elasticviscoplastic, and rate-independent elastic-plastic materials.
The conclusion clarified in this study are summarized as follows:
1) The path independences of T* and T integrals for all the cases including elastic-plastic case
were numerically verified.
2) The T* integral has better features as a non-linear fracture parameter than the T integral.
3) For a larger ratio of applied stress to yield stress, the slope of T* integral with respect to time
becomes smaller.
4) As the fluidity parameter ~ increases, the time-slope of T* integral in the viscoplasfic material
becomes smaller and approaches to the rate-independent plastic solution.
5) For elastic-perfectly plastic materials, the T* integral is proportional to the crack-tip opening
displacement.
6) The T* integral is a unified measure of the strength for the crack=tip fields in various materials
subject to stress wave loading.
References
Atluri, S.N. (1982): Path indpendent integrals in finite elasticity and inelasticity with body forces, inertia and arbitrary
crack-face conditions. Eng. Fract. Mech. 16, 341-364
Atluri, S.N.; Nishioka, T.; Nakagaki, M. (1984): Incremental path independent integrals in inelastic and dynamic fracture
mechanics. Eng. Fract. Mech. 20, 209-244
Atluri, S.N.; Nakagaki, M.; Nishioka, T.; Kuang, Z. B. (1986): Crack-tip parameters and temperature rise in dynamic crack
propagation. Eng. Fract. Mech. 23, 167-182
Baker, R.B. (1962): Dynamic stresses created by a moving crack. J. Appl. Mech. 29, 449-545
Bodner, S.R.; Symonds, P.S. (1962): Experimental and theoretical investigation of the plastic deformation of cantilever
beams subjected to impulse loading. J. Appl. Mech. 29, 719-728
Brust, F.W.; Nishioka, T.; Atluri, S.N.; Nakagaki, M. (1985): Further studies on elastic-plastic stable fracture utilizing the
T* integral. Eng. Fract. Mech. 20, 107%1103
Budiansky, B.; Rice, J.R. (1973): Conservation laws and energy release rates. J. Appl. Mech. 40, 201-203
Kishiomoto, K.; Aoki, S.; Sakata, M. (1980): On the path independent integral J. Eng. Fract. Mech. 13, 841-850
Mondkar, D.P.; Powell, G.H. (1974): Large capacity equation solver for structural analysis. Compt. Structures 4, 699-728
Nishioka, T.; Atluri, S.N. (1980 a): Numerical modeling of dynamic crack propagation in finite bodies, by moving singular
elements, Part I: formulation. J. Appl. Mech. 47, 570-576
342
Computational Mechanics 3 (1988)
Nishioka, T.; Atluri, S.N. (1980 b): Numerical modeling of dynamic crack proPagation in finite bodies, by moving singular
elements, Part II: results. J. Appl. Mech. 47, 577-582
Nishioka, T.; Atluri, S.N. (1983 a): Path-independent integrals, energy release rates, and general solutions of near-tip fields
in mixed-mode dynamic fracture mechanics. Eng. Fract. Mech. 18, 1-22
Nishioka, T.; Atluri, S.N. (1983 b): A numerical study of the use of path-independent integrals in elasto-dynamic crack
propagation. Eng. Fract. Mech. 18, 23-33
Nishioka, T.; Atluri, S.N. (1984a): On the computation of mixed-mode K-factors for a dynamically propagating crack,
using path-independent integral Y'. Eng. Fract. Mech. 20, 193-203
Nishioka, T.; Atluri, S.N. (1984b): A path-independent integral and moving isoparametric elements for dynamic crack
propagation. AIAA J. 22, 409~414
Nishioka, T.; Fujihara, H.; Yagami, H. (1986): Finite element analyses of stress intensity factors in dynamic crack propagation
using path independent J ' integral. In: Sih, G.C.; Nishitani, H.; Ishihara, T. (eds.): Role of Fracture Mechanics in
Modern Technology, pp. 561-573. North-Holland
Perzyna, P. (1963): The constitutive equations for rate sensitive plastic materials. Quarterly of Appl. Mech. 20, 321.
Rice, J. R. (1968): A path-independent integral and the approximate analysis of strain concentration by notches and cracks.
J. Appl. Mech. 35, 379-386
Sih, G. C.; Embley, G.T.; Ravera, R. S. (1972): Impact response of a finite crack in plane extension. Int. J. Solids & Struct.
8, 977-993
Thau, S.A.; Lu, T.H. (1971):Transient stress intensity factors for finite crack in an elastic solid caused by a dilatational
wave. Int. J. Solids & Struct. 7, 731-750
Communicated by G. Yagawa, May 18, 1987