Improved non-dimensional dynamic Research Article
advertisement

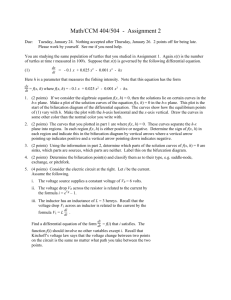
Research Article Improved non-dimensional dynamic influence function method based on tow-domain method for vibration analysis of membranes Advances in Mechanical Engineering 1–8 Ó The Author(s) 2015 DOI: 10.1177/1687814015571012 aime.sagepub.com SW Kang1 and SN Atluri2 Abstract This article introduces an improved non-dimensional dynamic influence function method using a sub-domain method for efficiently extracting the eigenvalues and mode shapes of concave membranes with arbitrary shapes. The nondimensional dynamic influence function method (non-dimensional dynamic influence function method), which was developed by the authors in 1999, gives highly accurate eigenvalues for membranes, plates, and acoustic cavities, compared with the finite element method. However, it needs the inefficient procedure of calculating the singularity of a system matrix in the frequency range of interest for extracting eigenvalues and mode shapes. To overcome the inefficient procedure, this article proposes a practical approach to make the system matrix equation of the concave membrane of interest into a form of algebraic eigenvalue problem. It is shown by several case studies that the proposed method has a good convergence characteristics and yields very accurate eigenvalues, compared with an exact method and finite element method (ANSYS). Keywords NDIF method, membrane vibration, eigenvalue, two-domain method Date received: 8 October 2014; accepted: 26 December 2014 Academic Editor: Gongnan Xie Introduction The authors developed the non-dimensional dynamic influence function (NDIF) method for free vibration analysis of arbitrarily shaped membranes.1,2 Although the NDIF method has the feature that it yields highly accurate solutions compared with the finite element method (FEM)3 and the boundary element method,4,5 the final system matrix equation of the NDIF method does not have a form of the algebraic eigenvalue problem6 unlike the FEM and the boundary element method. As a result, the NDIF method needs the inefficient procedure of searching values of the frequency parameter that make the system matrix singular by sweeping the frequency parameter in the range of interest. The authors introduced an improved NDIF method to eliminate the above inefficient procedure by changing the final system matrix equation in the NDIF method into a form of the algebraic eigenvalue problem.7,8 However, the improved NDIF method has the weak point that it does not give good solutions for 1 Department of Mechanical Systems Engineering, Hansung University, Seoul, Korea 2 Department of Mechanical and Aerospace Engineering, University of California, Irvine, CA, USA Corresponding author: SW Kang, Department of Mechanical Systems Engineering, Hansung University, Seoul 136-792, Korea. Email: swkang@hansung.ac.kr Creative Commons CC-BY: This article is distributed under the terms of the Creative Commons Attribution 3.0 License (http://www.creativecommons.org/licenses/by/3.0/) which permits any use, reproduction and distribution of the work without further permission provided the original work is attributed as specified on the SAGE and Open Access pages (http://www.uk.sagepub.com/aboutus/ openaccess.htm). Downloaded from ade.sagepub.com at UCI MEDICAL CENTER on March 3, 2015 2 Advances in Mechanical Engineering concave membranes with high concavity and multiconnected membranes with holes. This article employs the sub-domain method of dividing the entire domain of a membrane into two convex sub-domains. Although the proposed method is similar to the authors’ previous method2 in employing the subdomain approach, the two methods differ in whether the final system matrix equation has a form of the algebraic eigenvalue problem. A vast literature exists for obtaining analytical solutions of free vibration of membranes and plates having no exact solution as surveyed in the authors’ previous articles.1,2,7 However, a survey of the literature performed by the authors reveals that only a very few articles of them dealt with concavely shaped membranes and plates. Recently, many researchers have studied new numerical methods for more accurate solutions of concave membranes and plates than the FEM. For instance, Wu et al.9 developed the local radial basis function– based quadrature method for the vibration analysis of arbitrarily shaped membranes and solved highly concave-shaped membranes without the use of any domain decomposition. Shu et al.10 applied the twodimensional least-square-based finite difference method for solving free vibration problems of arbitrarily shaped plates with simply supported and clamped edges. It should be noted that the above methods9,10 still have a limitation in accuracy owing to a large amount of numerical calculation. In this article, a simple and practical approach, which is applicable to arbitrary shapes and offers a highly accurate solution, is proposed by extending the authors’ previous research.2,7 Note that the proposed method is occasionally ill-posed when too many nodes are used. On the other hand, the proposed method does not consider the problem of spurious eigenvalues, which have been studied in many articles related to plate vibrations,11–16 because the spurious eigenvalues do not appear in the NDIF method for fixed membranes. NDIF method reviewed NDIF The NDIF primarily satisfies the governing equation of the eigen-field of interest and physically describes the displacement response of a point in an infinite domain due to a unit displacement excited at another point.1,7 In the case of an infinite membrane (see Figure 1), the NDIF between the excitation point Pk and the response point P is given by the Bessel function of the first kind of order zero as follows1 NDIF = J0 ðLjr rk jÞ ð1Þ y infinite membrane Pi ri P r P3 P2 P1 rk x PN Pk PN – 1 Figure 1. Infinite membrane with harmonic excitation points that are distributed along the fictitious contour (dotted line) with the same shape as the finite-sized membrane of interest. in which L represents a frequency parameter; r and rk denote the position vectors for Pk and P, respectively; and jr rk j denotes the distance between Pk and P. The NDIF satisfies the governing equation (Helmholtz equation) r2 W (r) + L2 W (r) = 0 ð2Þ where W (r) is the transverse displacement of the finitesized membrane pffiffiffiffiffiffiffiffiffi depicted as the dotted line in Figure 1, L = v= T =r denotes the wavenumber in terms of the angular frequency v, the uniform tension per unit length T , and the mass per unit area r. Detailed illustrations on the NDIF are given in the authors’ previous article.1 NDIF method For free vibration analysis of an arbitrarily shaped membrane, of which the boundary is illustrated by the dotted line in Figure 1, N boundary points are first distributed at points P1 , P2 , . . . , PN along the boundary depicted in an infinite membrane. Assuming that harmonic displacements of amplitudes A1 , A2 , . . . , AN are, respectively, generated at points P1 , P2 , . . . , PN , the total displacement response at the point P may be obtained by the sum of responses (the linear combination of NDIFs given in equation (1)) that have resulted from each boundary point, that is W (r) = N X Ak J0 ðLjr rk jÞ ð3Þ k=1 where Ak may be called a contribution coefficient. Equation (3) is employed as an approximate solution Downloaded from ade.sagepub.com at UCI MEDICAL CENTER on March 3, 2015 Kang and Atluri 3 for the eigen-field of the finite-sized membrane. Note that the approximate solution also satisfies the governing equation because the NDIF satisfies the governing equation. Next, the boundary condition given for the membrane is discretized at boundary points P1 , P2 , . . . , PN as follows W (ri ) = Ui , i = 1, 2, . . . , N ð4Þ P2(1) P3(1) P1(1) P1( 2 ) PN(11)+ Nc where Ui denotes a boundary displacement given in boundary point Pi . Then, applying the discrete boundary condition (equation (4)) to the approximate solution (equation (3)) gives W (ri ) = N X Ak J0 ðLjri rk jÞ = Ui , i = 1, 2, . . . , N PN(11+) 2 PN( 22+) 2 PN(11+) 1 PN( 22+) 1 PN(11−) 1 P3( 2 ) PN( 22)+ Nc Γc DI Γ1 P2( 2 ) PN(11) PN( 22) DII Γ2 PN( 22−) 1 Figure 2. Concavely shaped membrane subdivided into two domains, DI and DII . k=1 ð5Þ Finally, equation (5) may be written in a simple matrix form SM(L)A = U ð6Þ where elements of the N 3 N system matrix SM(L) are given by SMik = J0 (Ljri rk j), the contribution vector A represents the contribution strength of the NDIFs defined at each boundary point, and the displacement vector U represents the discrete boundary condition. In the case of the fixed boundary condition (U = 0), equation (6) leads to SM(L)A = 0 ð7Þ which is the system matrix equation of the membrane. Since the system matrix SM(L) in equation (7) depends on the frequency parameter L, the inefficient procedure of calculating the singularity of the system matrix in the frequency range of interest is required to obtain the eigenvalues of the membrane. In the following section, an improved theoretical formulation for the NDIF method is presented to make the system matrix independent of the frequency parameter. The improved formulation is applicable to not only convex membranes but also concave one unlike the authors’ previous method.7 Improved formulation Assumed solution and boundary conditions A concave membrane, illustrated as the solid line in Figure 2, is divided into the two domains, DI and DII , which have the common boundary Gc . The domain DI is surrounded by the fixed boundary G1 and the common boundary Gc . The domain DII is surrounded by the fixed boundary G2 and the common boundary Gc . If the NDIF method is first applied for DI , an approximate solution in DI is obtained by the linear combination of NDIFs defined at boundary points on G1 and Gc . As a result, the approximate solution may be in the same manner as equation (3) WI (r) = N 1X + Nc k =1 (1) A(1) J L r r k 0 k ð8Þ where N 1 and Nc denote the numbers of boundary points on G1 and Gc , respectively; A(1) k denotes contribution coefficient for domain DI ; and r(1) k denotes a position vector for the kth boundary point for DI . The fixed boundary condition at boundary points (1) (1) P(1) 1 , P2 , . . . , PN 1 on G1 may be expressed as WI (r(1) i ) = 0, i = 1, 2, . . . , N 1 r(1) i ð9Þ P(1) i . where denotes the position vector for Applying the boundary condition, equation (9), to the assumed solution, equation (8), gives N 1X + Nc (1) A(I) k J0 (LRi, k ) = 0, i = 1, 2, . . . , N 1 ð10Þ k=1 (1) (1) where R(1) i, k = ri rk denotes the distance between (1) boundary points P(1) i and Pk . In order to decouple L from the Bessel function in equation (10), it is expanded in a Taylor series17 having the number of terms of the series M as follows M X J0 (LR(1) i, k ) ’ L2j f(1) j (i, k) ð11Þ j=0 where function f(1) j (i, k) is f(1) j (i, k) = Downloaded from ade.sagepub.com at UCI MEDICAL CENTER on March 3, 2015 2j ( 1)j (R(1) i, k =2) ½G(j + 1)2 ð12Þ 4 Advances in Mechanical Engineering Substituting equation (11) into equation (10) yields N1X + Nc A(1) k M X L2j u(1) j (i, k) = 0, i = 1, 2, . . . , N 1 j=0 k=1 ð13Þ which is rearranged as follows M X L N 1X + Nc 2j j=0 i = 1, 2, . . . , Nc (1) A(1) k uj (i, k) = 0, i = 1, 2, . . . , N 1 k=1 ð14Þ In the same manner as equation (8), an approximate solution in DII is assumed as WII (r) = N2X + Nc A(2) k J0 k =1 Lr r(2) k ð15Þ i = 1, 2, . . . , N 2 ð16Þ is applied to equation (15), one can obtain L (1) (1) A(1) J L r r 0 N1 + i k k N 2X + Nc (2) A(2) k J0 (LRi, k ) = 0, i = 1, 2, . . . , N 2 N 2X + Nc (2) A(2) k uj (i, k) = 0, Expanding the two Bessel functions in equation (22) in a Taylor series and rearranging yield M X N 1X + Nc L2j j=0 L2j i = 1, 2, . . . , N 2 (2) A(2) k uj (N 2 + i, k), i = 1, 2, . . . , Nc k=1 slopes at boundary points P(1) N 1 + 1, (1) . . . , PN 1 + Nc are the same as slopes at boundary (2) (2) points P(2) N 2 + 1 , PN 2 + 2 , . . . , PN 2 + Nc , respectively, one can obtain, by differentiating equation (22) Since P(1) N 1 + 2, A(1) k k=1 = N 2X + Nc ∂ ∂n(1) N1 + i A(2) k k=1 (1) J0 Lr(1) r N1 + i k ∂ J0 ∂n(2) N2 + i (2) Lr(2) N 2 + i rk , i = 1, 2, . . . , Nc ð24Þ 2j ( 1)j (R(2) i, k =2) ½G(j + 1)2 ð19Þ Next, continuity conditions in displacement and slope are considered on the common boundary Gc . (1) Displacements at boundary points P(1) N 1 + 1 , PN 1 + 2 , . . . , (1) PN 1 + Nc on Gc may be obtained by equation (8) as follows k=1 N 2X + Nc ð23Þ where function f(2) j (i, k) is N 1X + Nc (1) A(1) k uj (N 1 + i, k) k=1 M X N 1X + Nc ð18Þ WI (r(1) N1 + i ) = i = 1, 2, . . . , Nc ð17Þ k=1 f(2) j (i, k) = (2) (2) A(2) J L r r N2 + i k 0 k , ð22Þ j=0 (2) (2) where R(2) = r r i i, k k denotes the distance between and P(2) boundary points P(2) i k . Expanding the Bessel function in equation (17) in a Taylor series and rearranging yield j=0 = = k=1 2j N 1X + Nc k=1 WII (r(2) i ) = 0, M X (1) (1) Since displacements at P(1) N 1 + 1 , PN 1 + 2 , . . . , PN 1 + Nc are, respectively, the same as displacements at P(2) N 2 + 1, (2) (2) PN 2 + 2 , . . . , PN 2 + Nc , one can obtain, by using equations (20) and (21) k=1 where N 2 denotes the number of boundary points on G2 in Figure 2, A(2) k denotes contribution coefficient for domain DII , and r(2) k denotes a position vector for the kth boundary point for DII . If the fixed boundary con(2) (2) dition at boundary points P(2) 1 , P2 , . . . , PN 2 on G2 N 2X + Nc (2) Displacements at boundary points P(2) N 2 + 1 , PN 2 + 2 , (2) . . . , PN 2 + Nc on Gc may be obtained by equation (15) as follows N 2X + Nc (2) (2) (2) WII (r(2) ) = A J L r r N2 + i N2 + i k 0 k , ð21Þ k =1 N 1X + Nc (1) A(1) k LJ1 (LRN 1 + i, k ) k =1 = N 2X + Nc ∂R(1) N 1 + i, k ∂nN(1)1 + i (2) A(2) k LJ1 (LRN 2 + i, k ) k =1 (1) (1) A(1) k J0 LrN1 + i rk , i = 1, 2, . . . , Nc (2) where n(1) N 1 + i and nN 2 + i denote the normal directions (1) from points PN 1 + i and P(2) N 2 + i on Gc , respectively. Equation (24) is rewritten as ∂R(2) N 2 + i, k ∂nN(2)2 + i , i = 1, 2, . . . , Nc ð25Þ ð20Þ The Bessel functions in equation (25) are expanded in a Taylor series as follows Downloaded from ade.sagepub.com at UCI MEDICAL CENTER on March 3, 2015 Kang and Atluri 5 J1 (LR(a) Na + i, k ) ’ 1 + 2j M X ( 1)j (LR(a) Na + i, k =2) j=0 G(j + 1)G(j + 2) ð26Þ where a = 1 or 2. Substituting equation (26) into equation (25) leads to M X L2j j=0 = N 1X + Nc (1) A(1) k cj (N 1 + i, k) k=1 M X L2j j=0 N2X + Nc (2) A(2) k cj (N 2 + i, k), i = 1, 2, . . . , Nc k =1 ð27Þ where c(1) j (N1 + i, k) c(a) j (Na + i, k) = and c(2) j (N 2 + i, k) are given by 1 + 2j ( 1)j (R(a) ∂R(a) Na + i, k =2) Na + i, k G(j + 1)G(j + 2) ∂n(a) Na + i ð28Þ System matrix equation and eigenvalues Equations (14), (18), (23), and (27) may be expressed in simple matrix equations, respectively ð35Þ SML B = lSMR B where the system matrices SML and SMR are given, using the diagonal matrix I, by 3 I 0 0 7 0 I 0 7 .. .. .. .. 7 . . . . 7 7 .. .. .. 5 . I . . Q1 Q2 QM1 3 2 I 0 0 0 60 I 0 0 7 6 .. 7 .. .. 7 6 SMR = 6 0 0 . 7 . . 7 6. . . .. I 4 .. .. 0 5 0 0 0 QM 2 0 6 0 6 . 6 SML = 6 .. 6 . 4 .. Q0 ð36Þ ð37Þ and the vector B is given by B= A lA l2 A lM1 A ð38Þ where A = f A(1) A(2) g. Finally, multiplying equation (35) by the inverse matrix of SMR yields (1) (1) 2 (1) M (1) (F(1) 0 + lF1 + l F2 + + l FM )A = 0 ð29Þ SM1 R SML B = l B (2) (2) 2 (2) M (2) (F(2) 0 + lF1 + l F2 + + l FM )A = 0 ð30Þ which may be expressed as the algebraic eigenvalue problem (1) (1) (1) (1) ^ + l2 F ^ + lF ^ + + lM F ^ )A(1) (F 0 1 2 M (2) (2) (2) ð31Þ (2) ^ + lF ^ + l2 F ^ + + lM F ^ )A(2) = (F 0 1 2 M (C(1) 0 2 (1) + lC(1) 1 + l C2 + (2) 2 (2) = (C(2) 0 + lC1 + l C2 (1) + l C(1) M )A (2) + + lM C(2) M )A given by f(2) j (N2 + i, k), j j j j (1) (2) fj (i, k), fj (i, k), c(1) and j (N 1 + i, k), where the system matrix is given by j j (1) fj (N 1 + i, k), c(2) j (N 2 + i, k), A(1) (Q0 + lQ1 + l Q2 + + l QM ) A(2) M = 0 ð33Þ where matrix Qj is 3 0 F(1) j (2) 6 0 Fj 7 6 7 Qj = 6 ^ (1) ^ (2) 7 4 Fj Fj 5 (2) C(1) j Cj SM = SM1 R SML ð32Þ respectively. Equations (29)–(32) may be merged in a single matrix equation as follows 2 ð40Þ M In equations (29)–(32), the ith row and kth column ^ (1) , F ^ (2) , C(1) , and C(2) element of matrices F(1) , F(2) , F are SM B = l B ð39Þ 2 ð34Þ Note that equation (33) is called the higher order polynomial eigenvalue problem.18 Equation (33) may be changed into a linear matrix equation as follows ð41Þ Note that the system matrix SM in equation (40) is independent of the frequency parameter l. As a result, the eigenvalues of the membrane of interest can simply be extracted from equation (40) without the inefficient procedure required in the original NDIF method.2 Case studies The validity of the proposed method is shown through numerical tests of circular, rectangular, and highly concave membranes. For each case, the eigenvalues obtained by the proposed method are compared with those computed by the exact solution and FEM (ANSYS). Circular membrane The proposed method is first applied to a circular membrane of unit radius where the exact solution19 is known. As shown in Figure 3, the membrane is intentionally divided into two domains DI and DII for the proposed method. The boundary of each domain is Downloaded from ade.sagepub.com at UCI MEDICAL CENTER on March 3, 2015 6 Advances in Mechanical Engineering Table 1. Eigenvalues of the circular membrane obtained by the proposed method, the exact method, and FEM (parenthesized values denote errors (%) with respect to the exact method). No. 1 2 3 4 5 6 Exact method19 Proposed method (24 points) M = 12 M = 16 M = 20 2.405 (0.00) 3.832 (0.00) None None None None 2.405 (0.00) 3.832 (0.00) 5.135 (0.02) 5.520 (0.00) 6.390 (0.16) None 2.405 (0.00) 3.832 (0.00) 5.136 (0.00) 5.520 (0.00) 6.380 (0.00) 7.016 (0.00) 2.405 3.832 5.136 5.520 6.380 7.016 FEM (ANSYS) 3668 nodes 2378 nodes 1024 nodes 2.405 (0.00) 3.833 (0.04) 5.139 (0.05) 5.528 (0.14) 6.386 (0.10) 7.029 (0.19) 2.406 (0.05) 3.835 (0.07) 5.141 (0.10) 5.535 (0.27) 6.390 (0.16) 7.040 (0.35) 2.417 (0.50) 3.851 (0.50) 5.174 (0.74) 5.552 (0.58) 6.461 (1.27) 7.059 (0.61) FEM: finite element method. Table 2. Eigenvalues of the rectangular membrane obtained by the proposed method, the exact method, and FEM (parenthesized values denote errors (%) with respect to the exact method). No. 1 2 3 4 5 6 Exact method19 Proposed method (32 points) M = 12 M = 16 M = 20 4.363 (0.00) 6.293 (0.00) 7.458 (0.03) None None None 4.363 (0.00) 6.293 (0.00) 7.456 (0.00) 8.595 (0.00) 8.727 (0.00) 10.51 (0.00) 4.363 (0.00) 6.293 (0.00) 7.456 (0.00) 8.595 (0.00) 8.727 (0.00) 10.51 (0.00) 4.363 6.293 7.456 8.595 8.727 10.51 FEM (ANSYS) 2806 nodes 1813 nodes 1089 nodes 4.364 (0.03) 6.295 (0.03) 7.461 (0.07) 8.602 (0.08) 8.732 (0.06) 10.518 (0.07) 4.364 (0.03) 6.296 (0.06) 7.464 (0.11) 8.606 (0.13) 8.736 (0.10) 10.523 (0.13) 4.365 (0.05) 6.301 (0.13) 7.467 (0.15) 8.621 (0.30) 8.741 (0.16) 10.54 (0.29) FEM: finite element method. (1) 2 P P5(1) DI P1(1) P1( 2 ) P12(1) P12( 2 ) P11(1) P11( 2 ) P10(1) P10( 2 ) P8(1) P (1) P ( 2 ) 9 9 ( 2) 2 P DII P5( 2 ) P8( 2 ) Figure 3. Circular membrane divided into two domains using 24 boundary points. discretized with 12 boundary point and as a result 24 boundary points are used for the membrane. Eigenvalues obtained by the proposed method using M = 12, M = 16, and M = 20 are presented in Table 1, which also shows the eigenvalues given by the exact method19 and FEM (ANSYS). In Table 1, it may be said that the eigenvalues by the proposed method in the case of M = 20 converge accurately to those by the exact method. Furthermore, it should be noted in Table 1 that the proposed method using only 24 boundary points yields more accurate eigenvalues than FEM (ANSYS) using 3668 nodes. In addition, the ith natural of ffi the membrane can be calculated from frequencypfiffiffiffiffiffiffiffiffi Li = 2pfi r=T where Li is the ith eigenvalue in Table 1, r is the mass per unit area, and T is the uniform tension per unit length. On the other hand, the accuracy of an eigenvalue obtained by the proposed method can be verified by plotting its mode shape, which is omitted in the article. If the plotted mode shape does not satisfy exactly the given boundary condition (the fixed boundary condition), it may be said that the eigenvalue is not accurate and larger number of nodes and series functions are required to improve its accuracy. Rectangular membrane As shown in Figure 4, a rectangular membrane with dimensions 1:2 m 3 0:9 m is divided into two domains of the boundaries discretized with 16 points, respectively. In Table 2, eigenvalues obtained by the proposed method for M = 12, M = 16, and M = 20 are compared with eigenvalues obtained by the exact method19 and FEM (ANSYS). In Table 2, it may be observed that only the first three eigenvalues are obtained for M = 12, but the first six eigenvalues are successfully Downloaded from ade.sagepub.com at UCI MEDICAL CENTER on March 3, 2015 Kang and Atluri 7 Table 3. Eigenvalues of the highly concave membrane obtained by the proposed method and FEM (parenthesized values denote differences (%) with respect to FEM using 1701 nodes). No. Proposed method (32 points) 1 2 3 4 5 6 FEM (ANSYS) M = 12 M = 16 M = 20 1701 nodes 976 nodes 451 nodes 5.89 (3.15) 6.41 (0.16) 8.19 (0.24) None None None 5.89 (3.15) 6.41 (0.16) 8.19 (0.24) 8.88 (0.23) 9.95 (0.81) 11.23 (0.71) 5.89 (3.15) 6.41 (0.16) 8.19 (0.24) 8.88 (0.23) 9.95 (0.81) 11.23 (0.71) 5.71 6.42 8.17 8.89 9.87 11.31 5.72 6.43 8.18 8.90 9.89 11.34 5.74 6.44 8.21 8.92 9.94 11.43 FEM: finite element method. P2(1) P7(1) DI P1(1) P1( 2) P16(1) P16( 2) P15(1) P15( 2) (1) 14 ( 2) 14 0.2 m P2( 2) (1) 6 P6( 2 ) P P2(1) D II P7( 2) DI P P12(1) P ( 2) P13(1) P13 P10(1) P12( 2) P13(1) P2( 2 ) P1(1) P1( 2 ) P16(1) P16( 2 ) P15(1) P15( 2 ) P14(1) P14( 2 ) 0.45 m DII P10( 2 ) P13( 2 ) Figure 4. Rectangular membrane divided two domains using 32 boundary points. Figure 5. Highly concave membrane divided two domains using 32 boundary points. obtained when M increases (for M = 16 and M = 20) and fully converge to eigenvalues given by the exact method. this difference happens will be revealed in a future study. Conclusion Highly concave membrane Figure 5 shows a 1:2 m 3 0:9 m rectangular membrane with a V-shaped notch. The membrane is divided into two domains to apply the proposed method. Each domain is discretized with 16 boundary points as shown in Figure 5. Eigenvalues obtained by the proposed method and FEM (ANSYS) are summarized in Table 3 where it is shown that eigenvalues by the proposed method fully converge for M = 16. Since the current membrane has no exact solution, eigenvalues by the proposed method are compared with those by FEM. It may be observed in Table 3 that the five eigenvalues except the first eigenvalue by the proposed method have very small differences within 0.81% with respect to FEM using 1701 nodes. Interestingly, it is noticed that the first eigenvalues by the proposed method and FEM have relatively large difference. The reason why A practical, improved NDIF method for the free vibration analysis of concave membranes with arbitrary shapes was proposed in the article. It was revealed that the proposed method yields much more accurate eigenvalues, which converge to exact values for membranes having exact solutions, than FEM using a large number of nodes. On the other hand, the proposed method cannot be directly applied to a multiply connected membrane because it divides the region of the membrane of interest into only two regions. In order to overcome this weak point, an extended way of dividing the region of the membrane into more than two regions will be developed in future research. Declaration of conflicting interests The authors declare that there is no conflict of interest. Downloaded from ade.sagepub.com at UCI MEDICAL CENTER on March 3, 2015 8 Advances in Mechanical Engineering Funding This research was financially supported by Hansung University. 10. References 11. 1. Kang SW, Lee JM and Kang YJ. Vibration analysis of arbitrarily shaped membranes using non-dimensional dynamic influence function. J Sound Vib 1999; 221: 117–132. 2. Kang SW and Lee JM. Application of free vibration analysis of membranes using the non-dimensional dynamic influence function. J Sound Vib 2000; 234(3): 455–470. 3. Hughes TJR. The finite element method. Upper Saddle River, NJ: Prentice Hall, 1987. 4. Nardini D and Brebbia CA. A new approach to free vibration analysis using boundary elements. Appl Math Model 1982; 7(3): 157–162. 5. Brebbia CA, Telles JCF and Wrobel LC. Boundary element techniques. New York, NY: Springer-Verlag, 1984. 6. Wilkinson JH. The algebraic eigenvalue problem. New York, NY: Oxford University Press, 1965. 7. Kang SW, Kim SH and Atluri S. Application of the non-dimensional dynamic influence function method for free vibration analysis of arbitrarily shaped membranes. J Vib Acoust 2012; 134: 041008. 8. Kang SW and Atluri S. Application of non-dimensional dynamic influence function method for eigenmode analysis of two-dimensional acoustic cavities. Adv Mech Eng 2014; 2014: 1–9. 9. Wu WX, Shu C and Wang CM. Vibration analysis of arbitrarily shaped membranes using local radial basis 12. 13. 14. 15. 16. 17. 18. 19. function-based differential quadrature method. J Sound Vib 2007; 306: 252–270. Shu C, Wu WX, Ding H, et al. Free vibration analysis of plates using least-square-based finite difference method. Comput Meth Appl Mech Eng 2007; 196: 1330–1343. Hutchinson JR. Vibration of plates, in boundary elements X. Berlin: Springer, 1988, pp.413–430. Hutchinson JR. Analysis of plates and shells by boundary collocation. Berlin: Springer, 1991, pp.314–368. Chen JT, Lin SY, Chen KH, et al. Mathematical analysis and numerical study of true and spurious eigenequations for free vibration of plates using real-part BEM. Comput Mech 2004; 34: 165–180. Chen CW, Fan CM, Young DL, et al. Eigenanalysis for membranes with stringers using the methods of fundamental solutions and domain decomposition. Comput Model Eng Sci 2005; 8: 29–44. Young DL, Tsai CC, Lin YC, et al. The method of fundamental solutions for eigenfrequencies of plate vibrations. CMC: Comput Mater Con (Tech Science Press) 2006; 4(1): 1–10. Chen L, Lee YT, Kuo PS, et al. On the true and spurious eigenvalues by using the real or the imaginary-part of the method of fundamental solutions. Int J Comput Meth 2013; 10(2): 1–16. Spiegel MR. Advanced mathematics. Singapore: McGraw-Hill, 1983. Gohberg I, Lancaster P and Rodman L. Matrix polynomials. New York, NY: Academic Press, 1982. Blevins RD. Formulas for natural frequency and mode shape. New York, NY: Litton Educational, 1979. Downloaded from ade.sagepub.com at UCI MEDICAL CENTER on March 3, 2015