Model-based Bayesian Reinforcement Learning for Dialogue Management Pierre Lison
advertisement

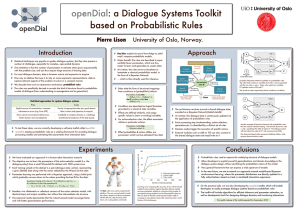
Model-based Bayesian Reinforcement Learning for Dialogue Management Pierre Lison Language Technology Group, University of Oslo August 26, 2013 Interspeech Motivation • Hand-crafting dialogue policies is hard! • • Noise & uncertainty (e.g. speech recognition errors) Large number of possible trajectories • Alternative: automatically optimise dialogue policies from (real or simulated) experience • Two types of approaches: • • Model-free reinforcement learning Model-based reinforcement learning 2 Motivation • Hand-crafting dialogue policies is hard! • • Noise & uncertainty (e.g. speech recognition errors) Large number of possible trajectories • Alternative: automatically optimise dialogue policies from (real or simulated) experience • Two types of approaches: • • Model-free reinforcement learning Model-based reinforcement learning Focus of this talk 2 Motivation • Model-based reinforcement learning: • Collect interactions and use them to estimate explicit models of the domain • Use the resulting models to plan the best action • Key advantage: can exploit prior knowledge to structure the domain models • We present an experiment showing the benefits of this approach 3 POMDPs St Ot 4 POMDPs St Rt Ot At 4 POMDPs St St+1 Rt Ot At Ot+1 4 POMDPs St St+1 Rt+1 Rt Ot At Ot+1 At+1 4 POMDPs with model uncertainty θT St θR St+1 Rt+1 Rt Ot At Ot+1 At+1 θO 5 Approach • After each observation, the parameters are updated via Bayesian inference • Parameter distributions gradually narrowed down to the values that best fit the observed data • Forward planning is used to select the next action to execute at runtime • Three source of uncertainty: state uncertainty, stochastic action effects, and model uncertainty 6 Abstraction • Dialogue domains often have large, complex state and action spaces • Need generalisation/abstraction techniques to avoid the «curse of dimensionality» • The framework of probabilistic rules offers such abstraction language • Capture domain structure through (parametrised) rules mapping conditions to probabilistic effects • Drastic reduction in the number of parameters 7 Probabilistic rules • Structured if...then...else cases associating conditions to distributions over effects: if (condition1 holds) then P(effect1)= θ1, P(effect2)= θ2, ... else if (condition2 holds) then P(effect3) = θ3, ... ... • Probabilistic rules serve as high-level templates for a Bayesian network [P. Lison, «Probabilistic Dialogue Models with Prior Domain Knowledge», SIGDIAL 2012] 8 Probabilistic rules: example r1: ∀ X: if (am = AskConfirm(X) ∧ iu ≠ X) then [P(au’ = Disconfirm) = θ1] 9 Probabilistic rules: example r1: ∀ X: if (am = AskConfirm(X) ∧ iu ≠ X) then [P(au’ = Disconfirm) = θ1] θ1 iu r1 a u’ am 9 Evaluation • Evaluation of the learning approach in a simulated environment: • Human-robot interaction domain (with Nao robot) • Simulator constructed from Wizard-of-Oz data • Goal: estimate the transition model of the domain (reward model is given) 10 Simulator • Simulation models: • User modelling: how the user is expected to react to the system actions • Context modelling: how the system actions change the state of the environment • Error modelling: how understanding errors can occur • Collected and annotated Wizard-of-Oz data to empirically estimate these models 11 Experimental setup • Two alternative formalisations of the transition model: Baseline: Our approach: θr1 St-1 St St-1 r1 St ... θrn At-1 θ Classical (factored) categorical distributions At-1 rn Model structured with probabilistic rules 12 Results: average return Average return 6,0 4,5 3,0 1,5 Categorical distributions Probabilistic rules 0 2 14 26 38 50 62 74 86 98 110 122 134 146 Number of simulated interactions 13 Conclusion • Hybrid approach to dialogue policy optimisation: • • Domain models structured with probabilistic rules Rule parameters estimated via model-based Bayesian RL • Experiment shows that the rule-structured model outperforms a classical factored model • Future work: • • Evaluate the approach with real interactions Combine offline and online planning 14