S M CIENTIA ARINA
advertisement

SCI. MAR., 67 (Suppl. 1): 89-97
SCIENTIA MARINA
2003
FISH STOCK ASSESSMENTS AND PREDICTIONS: INTEGRATING RELEVANT KNOWLEDGE.
Ø. ULLTANG and G. BLOM (eds.)
Integrative fish stock assessment by frequentist
methods: confidence distributions and likelihoods
for bowhead whales*
TORE SCHWEDER
Department of Economics, University of Oslo, Box 1095 Blindern, 0317 Oslo, Norway.
E-mail: tore.schweder@econ.uio.no
SUMMARY: Frequentist concepts of confidence distribution, reduced likelihood and likelihood synthesis are presented as
tools for integrative statistical analysis, leading to distributional inference. Bias correction, often achieved by simulations,
is emphasised. The methods are illustrated on data concerning bowhead whales off Alaska, and they are briefly compared
with Bayesian methods.
Key words: bowhead whales, likelihood synthesis, confidence distribution, reduced likelihood, meta-analysis.
INTRODUCTION
Fish stock assessments are often based on data
from different and independent sources. Methods
for integrating diverse data have been somewhat
neglected in the frequentist statistical tradition.
There, emphasis has usually been on one set of data
without much regard to previous relevant data, or to
the future use of the data in question. Many fisheries
scientists have therefore turned to Bayesian methods. Representing the results in distributional terms,
e.g. posterior distributions, adds attraction to the
Bayesian approach. There are, however, frequentist
methods available for integrative analysis, and distributional inference. The purpose of this paper is to
present the basic concepts of confidence distributions, reduced likelihoods and likelihood synthesis.
The methodology is illustrated by some recent applications to the assessment of bowhead whales off
*Received December 6, 2000. Accepted January 9, 2002.
Alaska. Bayesian methods are also briefly compared
with the frequentist methodology in the context of
fish stock assessment.
In the frequentist tradition, the properties of a
statistical method are analysed in probabilistic terms
ex ante, before data are observed. The main property of a method of confidence interval estimation is,
for example, the coverage frequency in repeated
applications. Ex post, one is left with an observed
confidence interval. The given degree of confidence
is a property of this interval, a property that is inherited from the coverage probability of the interval
estimation method ex ante. Wade (1999) discusses
and compares frequentist, Bayesian and likelihood
methods in the context of fish stock assessment. He
comments that what is lacking from the frequentist
methodology is a “strength of evidence” type argument, and he is critical of the widespread pre-specification of the level of significance in hypothesis
testing and of the degree of confidence in interval
estimation. The confidence distribution provides,
FREQUENTIST ASSESSMENT 89
however, the “strength of evidence” type argument
that Wade (1999) is missing. The confidence distribution is a generalisation and unification of confidence intervals and p-values. It can be regarded as
the frequentist analogue of the Bayesian posterior
distribution. Confidence distributions are not
uncommon in fisheries assessment (Gavaris, 1999;
Patterson et al., 2001), but often half-baked as bootstrap distributions.
Patterson et al. (2001) discuss briefly the merits
of the Bayesian approach to fish stock assessment.
They also discuss frequentist methods aiming at
confidence distributions representing the knowledge
and uncertainty that the data allow for. Patterson et
al. (2001) mention that the standard frequentist
methodology does not offer a structured framework
to incorporate prior information. They do mention
the method of likelihood synthesis (Schweder and
Hjort, 1996; 2002), but remark correctly that this
approach is not in common use.
CONFIDENCE DISTRIBUTIONS
Fisher (1930) introduced the concept of fiducial
probability distributions. Fisher could not accept the
use of Bayesian inference based on flat priors, and
his fiducial distribution was meant as a replacement
for the Bayesian posterior distribution. Efron (1998)
and others prefer the term “confidence distribution”
rather than “fiducial probability distribution”. The
defining property of a confidence distribution is that
its quantiles span all possible confidence intervals.
Confidence distributions and fiducial probability
distributions are essentially the same thing.
Consider a statistical model for the data X. The
model consists of a family of probability distributions for X, indexed by the vector parameter (ψ,χ),
where ψ is a scalar parameter of primary interest,
and χ is a nuisance parameter (vector).
A univariate data-dependent distribution for ψ,
with cumulative distribution function C(ψ; X) and
with quantile function C–1(α; X) is an exact confidence distribution if
)
Pψχ ψ ≤ C −1 (α ; X ) = Pψχ (C(ψ ; X ) ≤ α ) = α
for all α ∈ (0,1) and for all probability distributions
in the statistical model.
90 T. SCHWEDER
Definition 2
A function of the data and the interest parameter,
p(X, ψ), is a pivot if the probability distribution of
p(X,ψ) is the same for all (ψ, χ), and the function
p(x,ψ) is increasing in ψ for almost all x.
If based on a pivot with cumulative distribution
function F, the cumulative confidence distribution is
Definition 1
(
By definition, the stochastic interval (–∞,
C–1(α;X)) covers ψ with probability α, and is a onesided confidence interval method with coverage
probability α. The interval (C–1(α;X), C–1(β;X))
will for the same reason cover ψ with probability β
– α, and is a confidence interval method with this
coverage probability. When data have been
observed as X = x, the realised numerical interval
(C–1(α;x), C–1(β;x)) will either cover or not cover
the unknown true value of ψ. The degree of confidence β – α that is attached to the realised interval
is inherited from the coverage probability of the
stochastic interval. The confidence distribution has
the same dual property. Ex ante data, the confidence distribution is a stochastic entity with probabilistic properties. Ex post data, however, the confidence distribution is a distribution of confidence
that can be attached to interval statements. For simplicity, I will speak of confidence instead of
“degree of confidence”.
The realised confidence C (ψ0;x) is the p-value of
the one-sided hypothesis H0 : ψ ≤ ψ0 versus ψ > ψ0
when data have been observed to be x. The ex ante
confidence, C (ψ0;X) is from the definition uniformly distributed. The p-value is just a transformation of
the test statistic to the common scale of the uniform
distribution (ex ante). The realised p-value when
testing the two-sided hypothesis H0 : ψ = ψ0 versus
ψ ≠ ψ0 is 2 min {C (ψ0), 1 – C (ψ0)}.
Confidence distributions are easily found when
pivots (Barndorff-Nielsen and Cox, 1994) can be
identified.
C (ψ;X) = F(p(X,ψ)).
From the definition, a confidence distribution is
exact if and only if
C (ψ;X) ∼ U
is a uniformly distributed pivot. The symbol ∼
means “distributed as”.
Example: Linearity and normality
In linear normal models, a linear parameter, µ,
has a normally distributed estimator, µ̂, and an independent estimator of standard error, σ̂. Then,
µ − µˆ
~ tν ,
σˆ
meaning that the left hand side has a Student t-distribution with ν degrees of freedom, independent of
the parameters µ and σ, and is thus a pivot. With Fν
being the cumulative t-distribution,
µ − µˆ
C( µ ) = Fν
σˆ
is the student confidence distribution.
Fisher’s fiducial argument is in this case in short
hand:
( µ − µˆ ) ~ t
ˆ ˆ ,
ν ⇒ µ ~ µ + σtν
σˆ
meaning that the confidence distribution is the t-distribution scaled by σ̂, and located at µ̂. This is a
specification ex ante, with µ̂ and σ̂ being stochastic,
and ex post with observed values for these variates.
The sampling distribution for the standard error
estimator is related to the chi-square distribution χ2ν.
In short hand, it is given by the pivot
σˆ
~ χν2 / ν .
σ
The confidence distribution is therefore
C(σ ) = σˆ ν / χν2 .
If, say, the data result in the estimate σ̂ = 2, the
realised confidence distribution is
C(σ ) = 2 ν / χν2 .
Sampling distributions are different from confidence distributions. The sampling distribution of an
estimator ψ̂ at the observed estimate ψ = ψ̂obs has
cumulative distribution function
S(ψ ) = Pψˆ obs (ψˆ ≤ ψ ) = Fψˆ obs (ψ ) .
The cumulative confidence distribution is, however,
a p-value:
must therefore be converted to confidence distributions. The difference between the sampling distribution and the confidence distribution is illustrated for
the standard error in the above example.
Confidence distributions are unbiased by definition. The coverage probabilities of their confidence
intervals are correct, and the confidence median is a
median unbiased point estimator. Confidence distributions also have power properties. The NeymanPearson lemma specifies the conditions for the likelihood ratio tests to be most powerful. A parallel theorem exists for confidence distributions. An ex ante
confidence distribution based on the likelihood ratio
statistic is, in fact, less dispersed in a stochastic
sense (has smallest variance, and is also less dispersed for non-quadratic measures of dispersion)
than any confidence distribution based on other statistics for the same data (Schweder and Hjort, 2002).
Example: Multiple capture-recapture data
Consider a closed population of N differently
marked individuals. As an example, take the population component of marked immature bowhead
whales off Alaska. These whales were subject to
photo surveys in the summer and autumn of both
1985 and 1986, leading to Xt unique animals being
sampled in survey t = 1,…, 4, and X unique captures
in the pooled survey. From these data, N is to be estimated. Assume that each animal has an unknown
probability of being captured in a given survey, and
that captures are independent across animals and
surveys. The observed data are presented in Table 1.
The multiple capture-recapture model of Darroch
(1958) leads to a confidence distribution based on
the conditional distribution of X given {Xt}
(Schweder, 2003).
Calculating the half-corrected p-value for H0: N ≤
N0 for a number of values of N0, a very good normal
—
approximation in 1/√N emerge:
C( N ) = P( X > 62) +
(
~ Φ 5.134 − 87.307 / N
)
(1)
TABLE 1. – Number of individual captures in each of four photo surveys of bowhead whales in summer and autumn of 1985 and 1986,
and total number of individual captures. Source: da Silva et al.
(2000).
C(ψ ) = Pψ (ψˆ > ψˆ obs ) = 1 − Fψ (ψˆ obs ) .
Sampling distributions are often estimated by
bootstrap distributions. To obtain distributional
results for the parameter, bootstrap distributions
1
P( X = 62)
2
Marked immature
Marked mature
X1
X2
X3
X4
X
15
44
32
20
9
49
11
7
62
113
FREQUENTIST ASSESSMENT 91
Definition 3
The reduced likelihood function is given by
(
dp
.
) dT
Lreduced (ψ ; X ) = f F −1 (C(ψ ; T ))
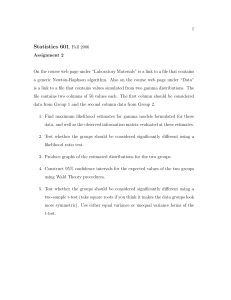
FIG. 1. – Confidence density of number of marked immature
bowhead whales off Alaska in 1986.
These probabilities are conditional given {Xt} =
(15, 32, 9, 11), and Φ is the cumulative normal distribution function. The resulting confidence density
is skewed, with a long tail to the right (Fig. 1).
REDUCED LIKELIHOODS
In integrative fish stock assessment, and in
other situations where different pieces of data are
joined in an integrated analysis, the challenge is
often to find appropriate weights for the various
data components. This problem is solved if wellfounded likelihood functions exist for the various
independent pieces of data. The likelihood function is the eminent tool for data integration
whether the various data are collected in the same
investigation, or whether some pieces of data are
old and some are new. Old data might be problematic when they only exist in the format of published summaries. The challenge is then to establish a likelihood function based on these summaries. This is possible when sufficient information is provided, or even better, when the author in
addition to the summaries and the inference provides what is called the reduced likelihood
(Schweder and Hjort, 2002).
Let us, as we did for confidence distributions,
restrict attention to cases in which exact reduced
likelihoods are available and can be constructed
from a pivot p. Let the pivot be a function of a onedimensional statistic T providing the cumulative
confidence distribution
C (ψ;T) = F(p(T,ψ)).
Let the pivot have density f =F´. Then
92 T. SCHWEDER
It is remarkable that Fisher (1930) not only presented his fiducial distribution, which here is called
the confidence distribution, but in passing he also
mentioned the basics for the reduced likelihood. He
did not use the term, but he clearly understood its
significance.
The reduced likelihood is often a marginal or a
conditional likelihood (Barndorff-Nielsen and Cox,
1994). I prefer the term “reduced likelihood” since
its main property is to be a likelihood for the interest parameter ψ, with the nuisance parameter χ
reduced away. In less clear-cut situations, when no
exact pivot exists, one can find approximate pivots
leading to approximate reduced likelihoods.
The confidence density is only appropriate as a
likelihood when the pivot is linear in ψ and additive
in the parameter and the data. The relationship
between the confidence density and the reduced
likelihood is generally
c(ψ ; X ) = Lreduced (ψ ; T )
dp dp
/
.
dψ dT
If the pivot is non-linear, the use of the confidence density as a likelihood introduces an unwanted term. Note that the Bayesian approach is to multiply prior densities with the likelihood of the new
data. When the confidence density is taken as the
prior density, the product of the prior and the likelihood agrees with Fisher’s likelihood analysis only
when the underlying pivot is linear and additive.
For large data, the pivot distribution is often normal. More precisely, the pivot can be transformed to
a scale to make it additive and normally distributed.
In this case the reduced log likelihood agrees with
the implied likelihood of Efron (1993). The normal
score of the cumulative confidence at ψ is
Φ–1(C(ψ)). The reduced (and implied) likelihood is
then
(
)
2
1
L(ψ ) = exp − Φ −1 (C(ψ ))
2
(2)
and is called the normal score reduced likelihood.
Example: Bowhead whales from photo-id
From the confidence distribution of the number
of marked mature whales, obtained as that for
FIG. 2. – Log likelihood and log confidence density.
marked immature whales in (1), the normal score
reduced likelihood is easily calculated. It is graphed
in Figure 2. A graph of the exact log likelihood is
also included. They agree well. The log confidence
density is in disagreement with the two. This is due
to non-linearity in the pivot. The Bayesian would
thus introduce a negative bias in his analysis by
using the confidence density as a prior to combine
with new or other data, and he would over-state the
precision of the photo-id data.
INTEGRATIVE STOCK ASSESSMENT:
BOWHEAD WHALES
As an alternative to the Bayesian assessment of
the Bering-Chukchi-Beaufort Seas stock of bowhead whales (International Whaling Commission,
1999), Schweder and Ianelli (2000) presented a frequentist assessment. In addition to data included in
the Bayesian analysis, they also included age-reading data and data from the photo-identification study
mentioned above. This is not the place to fully
review the data and the model. For details, see
Schweder and Ianelli (2000) and International
Whaling Commission (1999), and the papers
referred to in these two sources. The integrative
stock assessment by frequentist means is briefly
reviewed here in order to illustrate the main points
of the analysis. Punt and Butterworth (2000) compared Bayesian and frequentist approaches to
assessing the stock of bowhead whales.
The aim of the analysis is to estimate the current
replacement yield for the purpose of setting catch
limits for the aboriginal subsistence hunt in Alaska.
A point estimate of replacement yield is not satisfactory. For reasons of precaution, a confidence dis-
tribution is needed for this parameter (the Bayesian
analysis provided a posterior distribution), and the
emphasis is on the lower tail of the distribution. To
this end, the population dynamics is assumed to follow an age-specific Pella-Tomlinson model with
density dependence in fecundity. Available data,
including ‘soft data’ in the format of prior distributions, are used to estimate the parameters of the
model, and consequently the current replacement
yield.
The soft data are given as independent prior distributions on: Maximum sustainable yield rate;
Maximum sustainable yield level; Carrying capacity; Adult mortality; Age at sexual maturity; and
Maximum pregnancy rate, f. These prior distributions are partly based on general knowledge of
baleen whales, on data from similar species of
baleen whales, and to some degree on data from
bowhead whales. The best supported prior distribution is in my view that on f. Inter birth intervals, 1/f,
are found to follow a uniform distribution over the
interval 2.5 to 4 years. Consequently, the prior distribution for f has cumulative distribution function
C(f) = (8 f–2)/(3f), 0.25< f <0.4, which here is interpreted as a cumulative confidence distribution. The
other prior distributions are also interpreted as confidence distributions. In the present brief presentation, they are not given.
The observational data consist of: relative abundance estimates based on visual surveys 1978-1988;
an abundance estimate (visual and acoustic) for
1993; an abundance estimate based on photo-id for
1985/86; stock composition (proportion of calves
and adults); length and age readings of 45 whales
(aspartic acid racemisation in eye balls, George et
al., 1999) together with the length distribution in the
catch; catches from 1848 to present. These data are
assumed independent. Each data set provides a likelihood component. Considerable work has been
invested in obtaining these likelihood components.
The reader is referred to the primary documents for
details.
The frequentist analysis starts by constructing
the likelihood for all the data. Schweder and Ianelli
(2000) assumed all prior distribution to have arisen
from normally distributed pivots, making the
reduced log-likelihoods of the normal score type (2).
The log-likelihood resulting from the prior distribution of f is thus
2
1 −1 8 f − 2
l( f ) = − Φ
.
2
3 f
FREQUENTIST ASSESSMENT 93
FIG. 3. – Log likelihood from the prior distribution of maximum
pregnancy rate. The normalised log confidence density is drawn as
a dotted line.
This log-likelihood is displayed in Figure 3. The
confidence density is 2/3 f –2. The reduced likelihood
favours intermediate values of f, and is quite different from the confidence density.
The underlying structural model can in general
be parameterised in many different ways. A onecomponent Pella Tomlinson model, Pt+1 = Pt + α Pt
(1 – (Pt /K)z) in the 3 parameters α, z, and K, might
just as well have been parameterised in MSYR,
MSYL and K. In the first parameterisation, α and z
are input parameters (Raftery et al., 1995), while
MSYR and MSYL are outputs, while their roles are
interchanged in the second parameterisation. What
are input parameters of the structural model and
what are output parameters is a matter of choice.
This choice should not, however, influence the
results of the analysis. Likelihoods are invariant to
parameterisation, which is an important property.
In the chosen parameterisation, some likelihood
components are functions of input parameters, while
others are functions of output parameters, and some
might be functions of both. This applies to the prior
likelihood components, as well as to the observational components. The likelihood component based
on the important abundance estimate (visual and
acoustic) in 1993 is, for example, only a function of
the total stock size in 1993, which in the parameterisation chosen by Schweder and Ianelli (2000) is an
output parameter. Issues of parameterisation have
been discussed in connection with bowhead assessments (Schweder and Hjort, 1996; Punt and Butterworth, 1999).
When the various likelihood components have
been constructed, they are multiplied together to
form the total likelihood function. The model is then
fitted to the data by maximising the total likelihood.
Since some data are softer than others, the more
94 T. SCHWEDER
dubious priors are discarded provided the model can
be fitted to the surviving data. Discarding a prior is
equivalent to changing the corresponding likelihood
component to the non-informative flat likelihood.
Note that a constant likelihood is non-informative in
the strict sense, while the concept of non-informative prior distributions is problematic in the
Bayesian sense.
When the data on which the model is to be fitted
has been identified, one might want to look for simplifications in the structural part of the model. This
is ordinary model selection, and the guiding principle is to allow simplifications that make biological
sense but do not inflict substantial (statistically significant) loss of fit as measured by the likelihood
ratio.
Finally, confidence distributions for one-dimensional interest parameters are obtained, usually by a
simulation exercise. This should be done for one
parameter at the time. The aim is to identify an
approximately pivotal quantity and its distribution.
The pivot will usually be based on an estimator or a
test statistic for the parameter of interest, i.e. its
maximum likelihood estimator. This simulation
exercise might be seen as a parametric bootstrap,
and bias-correction methods to obtain confidence
distributions can be employed (Efron and Tibshirani, 1993; Schweder and Hjort, 2002)
The main findings concerning data, priors and
the parameter of primary interest: current replacement yields for the bowhead stock, are as follows
(Schweder and Ianelli, 2000).
1. The age data of George et al. (1999) are inconsistent with the survey data. The age data point
towards a much slower dynamics than indicated by
the survey data. The survey data and the photo-identification data are consistent within the Pella Tomlinson model.
2. The dubious priors on MSYL, MSYR and K can
safely be dropped.
3. Based on survey data, the photo-identification
data, and the remaining prior data, the lower end of
the confidence distribution for Replacement Yield in
number of bowhead whales have quantiles given in
Table 2.
TABLE 2. – Lower confidence quantiles of Replacement Yield in
Alaskan bowhead whales.
Confidence
Replacement Yield
1%
63
5%
86
10%
116
25%
140
50%
155
DISCUSSION
The methodology I have sketched is, I believe, in
the best Fisher-Neyman-Cox-Efron tradition (Efron
1998). Instead of reporting results in the format of
test results or 95% confidence intervals, I suggest
inference concerning parameters of primary interest
to be reported in terms of confidence distributions.
The spread and shape of a confidence distribution
convey a picture of the information and the statistical uncertainty in the inference, in much the same
way as a posterior distribution is interpreted in a
Bayesian analyses.
Since information updating is done via the likelihood function, it is important to have all data to be
integrated in the analysis represented as likelihood
components. The likelihood of prior data, reduced of
nuisance parameters, is in general different from the
prior confidence density of the parameter. Thus, in
order to allow results to be efficiently used in future
meta analyses or other integrative analyses, reduced
likelihoods for important parameters should be
obtained and presented along with their confidence
distributions.
Confidence distributions and reduced likelihoods
are usually obtained via simulation experiments.
Since simulations are likely to be used in future
analyses where the reduced likelihood of the study is
integrated with other likelihood components, one
should also report how the resulting reduced likelihood is to be simulated. To avoid multiple uses of
data, it is necessary to know the data basis for the
published reduced likelihood.
Compared to the Bayesian tradition, the subjectivity involved in priors not based on data is avoided. In the frequentist approach, the Bayesian’s problem with finding ‘non-informative’ priors does not
exist. A flat likelihood is non-informative in every
sense of the word. Also, the problem the Bayesian
has when there are more prior distributions than
there are free parameters (Schweder and Hjort,
1996; Pool and Raftery, 1998) does not affect the
frequentist analysis.
By multiplying independent likelihood components, also for prior data, data are integrated in an
optimal way. Integrating data solely through the
likelihood function could be called likelihood synthesis.
It happens that different data are inconsistent
with each other. This was the case for the age data
and the survey data in the bowhead example. But
this is then a scientific problem to be resolved, not a
problem of the method of analysis. Both Bayesian
and frequentist methods are useful in model selection and data confrontations. The use of informative
priors in the Bayesian approach might, however,
obscure the confrontation of one set of data with
another.
From the applied and pragmatic point of view,
the most important asset of the frequentist methodology is, perhaps, that it strives towards unbiased
inference. The very concept of bias is difficult for
the Bayesian, particularly for the subjectivist.
Bayes’ formula is certainly a mathematically correct
way to update a prior distribution in the light of new
data summarized in the likelihood function. The
subjectivist scientist can be wrong, but can he be
biased? Bias understood of systematic error in
repeated use of the method on data of the type specified in the statistical model is indeed a frequentist
notion. A frequentist point of view is thus needed to
declare a Bayesian posterior distribution free of
bias. As is demonstrated by the example below,
Bayesian posteriors can be badly biased, often due
to non-linearities and nuisance parameters. If, however, the posterior distribution can be declared free
of bias in the sense that its quantile spans intervals
with given coverage probability in repeated use, the
Bayesian posterior is a confidence distribution, and
is totally acceptable from the frequentist point of
view. Berger et al. (1999) report that the pragmatic
Bayesian approach of using flat priors on well-chosen transforms of the basic parameter often leads to
nearly unbiased posteriors.
Example
There are 10 independent normally distributed
observations Xi, each with a separate mean µ, but
with common variance 1. The interest parameter is
ψ = µ41+…+µ410. Taking µ1 = … = µ10 = 3, and thus ψ
= 810, the simulated data vector is
x = (3.2, 4.3, 4.2, 3.0, 4.1, 3.8, 1.2, 3.1, 2.7, 3.3).
The maximum likelihood estimate is ψ̂ = 1568.
With a flat prior on the vector µ, the joint
Bayesian posterior distribution is the joint normal,
µ ~ N10(x,I). The posterior distribution for ψ is then
the corresponding marginal distribution shown in
Figure 4.
By parametric bootstrapping, I found the following local approximate sampling distribution
4
ψˆ ~ .864 + .944 4 ψ + .647 Z
FREQUENTIST ASSESSMENT 95
FIG. 4. – Bayesian posterior distribution and approximate
confidence density for a non-linear parameter.
in the neighbourhood of µ̂= x. Here, Z is a standard
normal variate. The approximate cumulative confidence distribution is then,
.864 + .944 4 ψ − 4 ψˆ
(3)
C(ψ ) = Φ
.647
with confidence density shown in Figure 4. As
opposed to the Bayesian posterior, the confidence
distribution automatically corrects for the inherent
bias, at least approximately.
To illustrate the frequency behaviour of the
Bayesian posterior, as well as the confidence density, 10 replicates of µ̂ were simulated. For each replicate, the Bayesian posterior density, and the confidence density calculated from (3) are displayed in
Figure 5. This ends the example.
Often in fish stock assessments, the purpose is to
predict the status of the stock at some future point in
time. The parameters of the model are only of secondary interest. This problem is handled well in the
Bayesian approach, particularly when a frequentist
view is taken and potential bias is removed from the
FIG. 5. – In ten simulated replicates, the Bayesian posterior density
(solid lines) and confidence densities based on (3) (dashed lines) are
displayed. The vertical line indicates the true value of the parameter.
96 T. SCHWEDER
prediction distribution. Hall et al. (1999) show how
bootstrapping techniques can be used in a straightforward manner to obtain nearly unbiased prediction
distributions. Their method is well suited for the frequentist approach outlined here.
The attractions of the type of ‘frequentist
Bayesianism’ sketched above come at a price. A
Bayesian analysis ends up in a joint posterior for the
vector of basic parameters. From this joint distribution, one-dimensional posterior distributions are
obtained for any scalar parameter of interest simply
by calculating the appropriate marginal distribution.
This is particularly easy to do when the joint posterior distribution is approximated by a (large) sample.
In the frequentist approach, a joint confidence distribution cannot in general yield confidence distributions for scalar parameters of interest by computing
its marginal distributions. Here, unbiasedness is of
primary importance, and simulations with bias correction (Efron and Tibshirani, 1993) are usually
needed to obtain approximately valid confidence
distributions.
In most applications, the parameter is multi-dimensional. For each selection of an interest parameter,
there is then a vector of nuisance parameters. The
handling of nuisance parameters to obtain approximate priors with consequential approximate confidence distributions and reduced likelihoods can be difficult. This is an area of statistical research. Some
guidelines are given in Schweder and Hjort (2002).
REFERENCES
Barndorff-Nielsen, O.E. and D.R. Cox. – 1994. Inference and
Asymptotics. Chapman & Hall, London.
Berger, J.O., B. Liseo and R.L. Wolpert. – 1999. Integrated likelihood methods for eliminating nuisance parameters. Statist. Sci.,
14: 1-28.
da Silva, C.Q., J. Zeh, D. Madigan, J. Laake, D. Rugh, L. Baraff, W.
Koski and G. Miller. – 2000. Capture-recapture estimation of
bowhead whale population size using photo-identification data.
J. Cetacean Res. Manag., 2: 45-61.
Darroch, J.N. – 1958. The multiple-recapture census. I: Estimation
of a closed population. Biometrika, 45: 343-359.
Efron, B. – 1993. Bayes and likelihood calculations from confidence intervals. Biometrika, 80: 3-26.
Efron, B. – 1998. R.A. Fisher in the 21st century (with discussion).
Statist. Sci., 13: 95-122.
Efron, B. and R.J. Tibshirani. – 1993. An Introduction to the Bootstrap. Chapmann & Hall.
Fisher, R.A. – 1930. Inverse probability. Proc. Cambridge Phil.
Society, 26: 528-535.
Gavaris, S. – 1999. Dealing with bias in estimating uncertainty and
risk. In: V. Restrepo (ed.), Providing Scientific Advice to Implement the Precautionary Approach Under the MagnussonStevens Fishery Conservation and Management Act, pp. 17-23.
NOAA Technical Memorandum NMFS-F/SPO-40.
George, J.C., J. Bada, J. Zeh, L. Scott, S.E. Brown, T. O’Hara and
R. Suydam. – 1999. Age and growth estimates of bowhead
whales (Balaena mysticetus) via aspartic acid racemization.
Can. J. Zool. 77: 571-580.
Hall, P., L. Peng and N. Tajvidi. – 1999. On prediction intervals
based on predictive likelihood or bootstrap methods. Biometrika, 86: 871-880.
International Whaling Commission. – 1999. Report of the Scientific Committee, Annex G. Report of the Sub-Committee on Aboriginal Subsistence Whaling. J. Cetacean Res. Manag.,
1(SUPPL.): 179-94.
Patterson, K., R. Cook, C. Darby, S. Gavaris, L. Kell, P. Lewy, B.
Mesnil, A. Punt, V. Restrepo, D.W. Skagen and G. Stefansson.
– 2001. Estimating uncertainty in fish stock assessment and
forecasting. Fish and Fisheries, 2: 125-157.
Poole, D. and A.E. Raftery. – 1998. Inference for Deterministic
Simulation Models: The Bayesian Melding Approach. Technical Report no. 346, Department of Statistics, University of
Washington (unpublished).
Punt, A.E. and D.S. Butterworth. – 1999. On assessment of the
Bering-Chukchi-Beaufort Seas stock of bowhead whales (Balaena mysticetus) using a Bayesian approach. J. Cetacean Res.
Manag., 1: 53-71.
Punt, A.E. and D.S. Butterworth. – 2000. Why do Bayesian and
maximum likelihood assessments of the Bering-Chukchi-Beaufort Seas stock of bowhead whales differ? J. Cetacean Res.
Manag., 2: 125-133.
Raftery, A.E., G.H. Givens and J.E. Zeh. – 1995. Inference from a
deterministic population dynamics model for bowhead whales
(with discussion). J. Am. Statist. Ass., 90: 402-430.
Schweder, T. – 2003. Abundance estimation from photo-identification data: confidence distributions and reduced likelihood for
bowhead whales off Alaska. Biometrics (to appear).
Schweder, T. and N.L. Hjort. – 1996. Bayesian synthesis or likelihood synthesis - what does the Borel paradox say? Rep. int.
Whal. Commn, 46: 475-479.
Schweder, T and N.L. Hjort,. – 2002. Confidence and likelihood.
Scandinavian J. Statist., 29: 309-332
Schweder, T. and J.N. Ianelli. – 2000. Assessing the BeringChukchi-Beaufort Seas stock of bowhead whales from survey
data, age-readings and photo-identifications using frequentist
methods. Paper IWC/SC/52/AS13 presented to The International Whaling Commission Scientific Committee, June 2000,
179-194.
Wade, P.R. – 1999. A comparison of statistical methods for fitting
population models to data. In: G.W. Garner, S.C. Amstrup, J.L.
Laake, B.F.J. Manly, L.L. McDonald and D.G. Robertson
(eds.), Marine Mammal Survey and Assessment Methods, pp
249-270. AA Balkema, Rotterdam.
FREQUENTIST ASSESSMENT 97