Document 11490383

Journal of Hydrology (2007) 336 , 334 – 346 a v a i l a b l e a t w w w . s c i e n c e d i r e c t . c o m j o u r n a l h o m e p a g e : w w w . e l s e v i e r . c o m / l o c a t e / j h y d r o l
Development and testing of a simple physically-based distributed rainfall-runoff model for storm runoff simulation in humid forested basins
Du Jinkang
a
, Xie Shunping
Vijay P. Singh
c a
, Xu Youpeng
a
, Chong-yu Xu
b,d,
*
,
a b
Department of Urban and Resources Sciences, Nanjing University, Nanjing 210093, China
Department of Geosciences, University of Oslo, P.O. Box 1047, Blindern, NO-0316 Oslo, Norway c
Department of Biological and Agricultural Engineering, Texas A&M University, 2117 TAMU, Scoates Hall,
College Station, TX 77843-2117, USA d Department of Earth Sciences, Uppsala University, Sweden
Received 26 January 2006; received in revised form 3 January 2007; accepted 10 January 2007
KEYWORDS
Storm runoff;
Distributed hydrological model;
Forested basins;
Overland flow;
Lateral subsurface flow;
Saturation excess overland flow
Summary A distributed rainfall-runoff model was developed to predict storm runoff from humid forested catchments. The model is physically based and takes into account the saturation excess overland flow mechanism and preferential subsurface flow. The watershed is discretized into a number of square grids, which then are classified into overland flow and channel flow elements based on water flow properties. On the overland elements, Infiltration, overland flow and lateral subsurface flow are estimated, while on channel flow elements river flow routing is performed. Lateral subsurface flow is calculated using Darcy’s law and the continuity equation, whereas overland flow and channel flow are modeled using a one dimensional kinematic wave approximation to the St. Venant equations. The model governing equations are solved by an implicit finite difference scheme. While using process-based equations and physically meaningful parameters, the model still maintains a relatively simple structure. Most of the model parameters can be derived from digital elevation models (DEMs), digital soil and land use data, and the remainder of the parameters that are comparatively sensitive can be determined by model calibration. The model is tested using nine storm events in the Jiaokou watershed, a sub-basin of Yongjiang River in Zhejiang Province, China. Of these storms, one storm is used for calibrating the model parameters and the remaining eight storms are used to verify the model. When judged by the model efficiency coefficient ( R
2
), volume conversation index (VCI), absolute error of the time to peak ( D T ), and relative error of the peak flow
* Corresponding author. Tel.: +47 22 855825; fax: +47 22 854215.
E-mail address: chongyu.xu@geo.uio.no
(C.-y. Xu).
0022-1694/$ - see front matter ª 2007 Elsevier B.V. All rights reserved.
doi:10.1016/j.jhydrol.2007.01.015
Development and testing of a simple physically-based distributed rainfall-runoff model 335 rate ( d P max
), acceptable results are achieved. Sensitivity analysis shows that the model is sensitive to saturated hydraulic conductivity (Ks), Manning’s roughness coefficients ( n ) and the initial soil moisture content.
ª 2007 Elsevier B.V. All rights reserved.
Introduction
In humid forested catchments, a high infiltration capacity is usually observed due to the presence of a thick organic layer consisting of decomposed canopy leaves and vegetation on the ground surface. Two runoff generation mechanisms are of importance in such catchments. One is the satu-
rated-excess overland flow ( Dunne and Black, 1970
). This mechanism may dynamically generate runoff during a storm in a mountainous basin, not just near stream channels but also in depressions or hollows (
). Together with return flow, the variable source-area concept (
Hewlett and Hibbert, 1967) is used to describe these processes. The
dynamics of the processes are controlled by the topography, soils, antecedent moisture and rainfall characteristics.
Another storm runoff mechanism is lateral subsurface flow. The importance of subsurface flow processes in generating variable source areas was first addressed by
Black (1970) and Freeze (1972a,b). Later
reported that almost all of the water in streamflow has passed over or through a hillside and its soils before reaching the channel. Subsurface flow is likely to be significant in watersheds with soils having high hydraulic conductivities and an impermeable or semipermeable layer at shallow depth that can support a perched water table. Such conditions often occur in humid forested watersheds where the organic litter, interplaced roots, decayed root holes, animal burrows, worm holes, and other structural channels making a highly permeable medium for the rapid movement of water in all
directions ( Sloan and Moore, 1984
).When the infiltrated water in such a medium reaches an impermeable layer or a semi-permeable layer, lateral subsurface flow is gener-
ated ( Whipkey, 1965; Beven and Germann, 1982; Mosley,
1979; Tani, 1987; Tsuboyama et al., 1994). The importance
of the steeper topography for understanding the subsurface runoff processes has been emphasized by
Tani (1997) and Sidle et al. (2000), among others.
Both saturated-excess overland flow and lateral subsurface flow as well as their influencing factors, such as soil, vegetation, and topography, have considerable spatial variability. When modeling the storm runoff process, the influence of this variability on runoff should be considered.
Some lumped and semi-distributed models have implicitly considered parts of these variabilities, such as Xinanjiang
), ARNO model (
(
Liang et al., 1994 ) and TOPMODEL (
1979). Because of the lack of direct physical meaning of
their parameters, most of such models need ‘sufficiently long’ meteorological and hydrological records for their calibration, which may not always be available. The curve fitting calibration makes physical interpretation of the fitted parameter values quite difficult. Conceptual lumped and semidistributed models are of little use in the estimation of sediment erosion and contaminant transport within a watershed, simulation of the rainfall-runoff response in ungauged watersheds, and prediction of the effects of land-use change or weather/climate-related changes (
Todini, 2002). On the other hand, physically based distrib-
uted models, which rely on conservation equations of mass and momentum of the watershed, ‘can in principle overcome many of the above deficiencies through their use of parameters which have a physical interpretation and through their representation of spatial variability in parameter values’ (
). Recent advances in remote sensing, geographic information systems (GISs), and computer technology have made physically-based distributed hydrologic models attractive for flow simulation and prediction, a large number of distributed hydrological models have therefore been developed and applied. Examples of
such models include the SHE model ( Abbott et al., 1986a,b
), the IHDM model (Institute of Hydrology Distributed Model; e.g.,
Calver and Wood, 1995 ), the CSIRO TOPOG model
(e.g.,
Plate, 1997). However, owing to their complex structure,
a huge number of parameters, and large data requirements, the application of this type of modeling techniques is not without limitations (
Beven, 2001 ). In recognition of the dis-
advantages of using either of these modeling approaches, some intermedial modeling approaches are developed.
Reggiani et al. (1998, 1999) derived the balance equations
for mass, momentum and energy at what they called the
Representative Elementary Watershed (or REW) scale. However, the mass balance equations of the REW approach include mass exchange flux terms which must be defined externally before their application to real catchments.
Zehe et al. (2005) extend this earlier work and present an ap-
proach to develop and assess closure relations capable of parameterizing the effects of typical subscale variabilities and structures, that exist inside the REW, on the exchange of water mass between different sub-regions within the
REW. To further our understanding of and our ability to model hydrological processes, some researches have focused on identifying and quantifying hillslpoe processes as a first step towards the assessment of (sub)catchment response. Many hillslope scale models have been developed over the past 30 years based on the Richards and Boussinesq equations (e.g.,
Pikul et al., 1974; Sloan and Moore, 1984;
Verhoest and Troch, 2000). More recently ( Troch et al.,
2002, 2003) a series of new hillslope models have been
developed based on a concept presented by
(1998). These microscale models have improved our under-
standing of the hillslope storage process, however, for catchment scale studies, the integrated models based on the above approaches become too complex and data demanding.
In studying the land-use impacts on storm-runoff generation,
used a modified version of the hydrological model WaSiM-ETH (
336
(1) a macropore module accounting for fast infiltration processes, (2) a siltation module decreasing hydraulic conductivity of the soil surface as a function of precipitation intensity and vegetation, and (3) sub-grid variability. They point out that uncertainty exists in both land use and hydrological models. For less complex hydrological models (small number of parameters), a rigorous uncertainty estimation, such as Bayasian method can be carried out. However, it is impossible to quantify uncertainty for complex models due to large number of parameters and long computing time involved.
The above discussion reveals that by definition, no model is perfect and best for all catchment types and in all circumstances and scenarios. But, to be useful, selected models must satisfy certain objectives; timeliness, accuracy, reliability and consistency are considered as the desirable characteristics of a good model. While no modeller can claim any particular model to be perfect in its representation of the catchment system, new models or construction of
‘new’, ‘improved’, ‘hybrid’ or generalised’ versions of the previously existing models are continuously reported in the literature. An entirely redesigned and re-coded model might allow better handling, faster computation time, better data structures, better embedding in existing software structures.
The main objective of this study is, therefore, to develop and test a simpler and parsimonious physically-based distributed rainfall-runoff model for storm runoff simulation in humid forested regions that takes into consideration the main mechanisms (e.g., the saturation excess overland flow mechanism and the lateral subsurface flow mechanism).
The basic equations for overland flow, lateral subsurface flow, and stream flow are simplified using the kinematic wave equations, based on the concept that topography is the most important landscape feature controlling water flow. The parameters for the equations are physically interpretable, and the computational order and most of the model parameters can be derived from digital elevation models (DEMs), soil type map and land use map. A few sensitive parameters can be determined by model calibration.
The model was tested in Jiaokou watersheda sub-basin of
Yongjiang River in eastern China.
Model description
Watershed discretization and river network delineation
The model proposed here is based on raster data structures, and grids are used to present watershed discretization and to describe spatially distributed terrain parameters (i.e., elevation, land use, soil type, etc.). The grid based Digital
Elevation Model is used to derive hydrologic features (i.e., slope, flow direction, flow accumulation, stream network, computational cascade for flow routing, etc.).
Each grid cell representing an area with average properties has eight possible flow directions, the direction of flow from one cell to its neighboring cells is ascertained by choosing the direction of the steepest descent among the eight permitted choices. Once the flow direction in each cell is identified, a cell-to-cell flow path upto the catchment
J. Du et al.
outlet is determined, computational sequencing of the model starting from the most upstream cells to the downstream cells is also determined.
For hillslope and channel network definition, a threshold number of cells (minimum support areas) is set to delineate the channel network for the watershed. Any cell with a number of cells upstream equal to or greater than the threshold is considered to be a channel cell, others are considered as hillslope cells. Each hillslope cell has model components for precipitation, infiltration, overland flow and subsurface flow, and each channel cell has model components of channel flow. The overland flow and subsurface flow of each hillslope cell are routed to channel cells. The channel flow routing is carried out for each channel cell according to their computational order.
For the sake of simplicity, water percolation towards the deeper soil layers and their contribution to the discharge are not accounted for. Being an event storm runoff model, evapotranspiration is omitted.
Surface runoff and subsurface flow generation
Given the vertical soil moisture profile, the Richards equation is used to describe the vertical infiltration, which accounts for gravity and capillary pressure. Nonetheless, owing to the high conductivity value caused by relatively large pores in the top layer of soil in humid forest water-
sheds ( Beven and Germann, 1982 ), the soil absorbs nearly
all the rainfall before it is saturated, thereafter surface runoff is generated by the saturation excess overland flow mechanism. This consideration is justified by the fact that the saturation excess mechanism, being linked to a cumulative phenomenon and conditioned by a lateral redistribution movement of water in the soil, becomes dominant as the scale of the model increases (
1995). For this reason, the use of the Richards equation
for the description of the soil vertical infiltration can be avoided by assuming that at the cell scale or at larger scale the water will always infiltrate until the saturation is
). Hence, in our model if the net rainfall is less than the soil saturation deficit at the time step, all net rainfall infiltrates into the soil; otherwise, surface runoff is calculated as the net rainfall minus soil saturation deficit.
Because of the existence of relatively large pores and pipes in forested areas in the humid climate, the lateral subsurface flow during rainfall period in the top soil has turbulent nature. Hydraulic equations for pipe flow were used
definition of the macropore system. The modified Darcy’s
equation is used to account for turbulent flow ( Whipkey,
1965), and most modifications have been developed using
water parameters was used in modeling subsurface storm flow; with this method, parameters, such saturated hydraulic conductivity, may be an order of magnitude greater than that measured for the soil matrix using small undisturbed soil cores. Many models have been used to calculate lateral subsurface flow resulting from macropore soils with differ-
Development and testing of a simple physically-based distributed rainfall-runoff model
Overland flow
ent complexities (
Beven, 1981; Nieber and Walter, 1981;
Nieber, 1982; Fipps and Skaggs, 1989; Paniconi and Wood,
1993; Verhoest and Troch, 2000; Sloan and Moore, 1984;
Troch et al., 2002, 2004). In this paper, the kinematic wave
approximation of the subsurface flow was used to represent the lateral subsurface flow (
Beven, 1982; Singh, 1997 ) not
only for its simple nature, but also for its effectiveness.
The method assumes that the flow lines in the soil above the impermeable boundary or rock are parallel to the bed and that the hydraulic gradient equals the slope of the bed or the slope of the hillslope surface if the soil layer depth is the same.
The method is based on two equations, i.e., the continuity equation
and Darcy’s law (Eq.
):
Continuity equation: g o h o t
þ o q o l
¼ r g
Darcy’s law:
ð 1 Þ q ¼ KhS ð 2 Þ where q is the unit-width subsurface flow rate (m
2
/s);
K (m/s) is the effective saturated hydraulic conductivity
(m/s), which may be an order of magnitude greater than the measured values for the soil matrix using small, undisturbed soil cores; h is the effective soil water depth (m); S is the hydraulic slope; r g is the net incoming flux (m/s)
(infiltration and soil evaporation rate), if evaporation is neglected; r g is equal to infiltration (the effective precipitation for humid forest area); and g is the effective volumetric water content deficit of the soil, when the water table rises, the value of g is the difference of the porosity and initial water content, when water table falls, the value is the difference of the porosity and the volumetric water content at field capacity. If S is assumed to be equal to the slope of the surface gradient S
0
, then, Eq.
q ¼ KhS
0
ð 3 Þ
Eqs.
serve as the kinematic wave equations representing the complex subsurface flow.
An explicit finite difference method is used for the solution of the model equations. Therefore, Eq.
is written as q ð i ; t Þ q ð up ; t Þ
þ
D l
ð h ð i ; t Þ h ð i ; t D t ÞÞ g
¼ r g
ð i ; t Þ
D t and the water depth of grid cell i and time t is
ð 4 Þ h ð i ; t Þ ¼ g h ð i ; t D t Þ D l þ q ð up ; t Þ D t þ r g
ð i ; t Þ D l D t
S
0
K D t þ D l g
ð 5 Þ
If the computed effective soil water depth is less than the depth of the soil, all of the rainfall will infiltrate without any surface runoff; otherwise the return flow may occur.
After substituting h ( I , t ) for the soil depth, r g is reproduced.
If r g
> 0, r g is the infiltration of that time period; if it is less than the effective precipitation, the difference of the two is surface runoff; or else if r g
< 0, r g is the return flow, which will flow out of the subsurface to build part of surface runoff. In this case, all effective precipitation becomes surface runoff.
337
Known as the dynamic wave equations, the overland flow equations are highly nonlinear and therefore do not have analytical solutions. Under a different set of simplifying assumptions, more practical models can be derived from the dynamic wave equations; the kinematic-wave equation is the simplest one, which neglects the local acceleration, convective acceleration and pressure terms in the momentum equation (thus, friction and gravity forces essentially balance each other). There have been numerous studies applying the kinematic wave theory to model overland flow
( Eagleson, 1970; Smith and Woolhiser, 1971; Kibler and
Woolhiser, 1972; Singh and Woolhiser, 1996; Woolhiser,
In this paper, the one dimensional kinematic-wave equations were adopted to calculate hillslope overland flow. The
equations include ( Chow et al., 1988 ):
Continuity equation: o h o t
þ o q o l
¼ r and momentum equation:
S f
¼ S
0
ð
ð
6
7
Þ
Þ where h is the depth of water on the surface ( m ); q is the unit-width discharge (m 2 /s); r is the vertical net incoming flux (m/s); l is the length of the slope ( m ); t is the time
( s ); S f is the friction slope; and S
0 is the slope of the surface.
The surface flow rate is calculated by Manning’s equation
v ¼ s
1 = 2 f h 2 = 3
= n ð 8 Þ where n is the Manning’s roughness of the surface. From
Eqs.
, the following equation is obtained: h ¼ aq b where a ¼ ð n = p ffiffiffiffi
0
Þ
3 = 5 and b = 3/5.
ð 9 Þ
A finite difference method is used for the solution of the kinematic wave equations. To that end, the difference equation for the continuity equation
becomes: q ð i ; t Þ q ð up ; t Þ
þ
D l h ð i ; t Þ h ð i ; t D t Þ
D t
¼ r ð i ; t Þ ð 10 Þ where q ( i , t ) and q(up, t) represent the unit-width discharge
(m
2
/s) from the current cell and upper cell(s); h ( i , t ) and h ( i , t D t ) are the surface water depth (m) for the cell from the current and the last time calculations; D l is the length
(m) of cell i ; and r ( i , t ) is the net vertical incoming flux
(m/h) for cell i .
Substituting Eq.
into Eq.
and rearranging, the following equation is obtained:
D t
D l q ð i ; t Þ þ a ð q ð i ; t ÞÞ b
¼
D t
D l q ð up ; t Þ þ a ð q ð i ; t D t ÞÞ b
þ D t r ð i ; t Þ
ð 11 Þ
Eq.
is nonlinear and cannot be solved directly. However, Newton’s method (
) can be applied iteratively to obtain a numerical solution. The initial condition for the surface flow discharge is defined as 0, meaning that there is no surface flow at the beginning of simulation.
338
The boundary condition for the surface flow is defined as q ( t ) = 0.
Channel flow
There are a number of approaches used to perform channel flow routing, which can be broadly classified into two categories: (1) hydrodynamic routing, and (2) hydrological routing. The hydrodynamic routing approach is based on
Saint-Venant equations, such as the simplified kinematic wave model and diffusive wave model. The hydrological routing approach is based on the continuity equation in the Saint-Venant formulation, but empirical relationships are used to replace the momentum equation, such as the
Muskingum, Muskingum–Cunge and Unit Hydrograph methods (
Arora et al., 2001 ). Full hydrodynamic routing models
are usually too complex for practical use and require data that are difficult to obtain, hydrological routing models are used more often by hydrologists but their parameters need to be calibrated.
In this paper, a simple one dimensional hydrodynamic streamflow routing model is developed to simulate the channel network flow, based on the kinematic wave approximation of the St. Venant equations and the routing algorithms used in the WATFLOOD distributed hydrological model (
) and in the WATROUTE (
The kinematic wave approximation of the St. Venant equations:
Continuity equation: d S d t
¼ I Q q and momentum function:
S f
¼ S
0
ð
ð
12
13
Þ
Þ where S is the channel water storage, I is the inflow, Q is the outflow, q is the lateral inflow including both overland flow and subsurface flow from all adjacent inflow grid cells, S f is the friction slope, and S
0 is the channel slope.
The channel flow rate is calculated by Manning’s equation (
) as
V ¼ S
1
2 f
R
2
3 = n ð 14 Þ where V is the channel velocity, R is the hydraulic radius
(area of flow divided by the wetted perimeter, requiring the information about the river width), and n is Manning’s roughness coefficient.
Due to the difficulty in obtaining the river width, the
Manning’s equation was approximated as (
V ¼ S
1
2 f
A
1
3 = n ð 15 Þ where A is the channel cross-sectional area. Replacing S f
S
0
, the formula for the outflow Q is obtained as by
Q ¼ S
1
2
0
A
4
3
= n ð 16 Þ
The channel cross-sectional area is approximated by dividing the storage S in the channel reach by the length L of the channel reach (
Kouwen et al., 1993; Arora et al., 2001 ):
J. Du et al.
A ¼ S = L ð 17 Þ
Eqs.
are solved using a finite difference method.
Substitution of Eq.
into the difference form of Eq.
S t þ 1
D t
S t
D t
¼
I t
þ I t þ 1
2
Q
2 t
1 1
2 n
S
4 = 3 t þ 1
L
4 = 3
S
1 = 2
0
!
þ q t
þ q t þ 1
2
ð 18 Þ and then rearranging one obtains:
S t þ 1
D t
þ
1
2
1 n
S
L
4 = 3 t þ 1
4 = 3
S
1 = 2
0
!
¼
I t
þ
2
I t þ 1
Q
2 t
S t
þ
D t
þ q t
þ q t þ 1
2
ð 19 Þ
This equation can also be solved by using Newton’s iterative method as above.
Study area and data
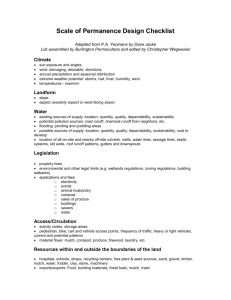
The study area, Jiaokou Reservoir watershed, is a sub-basin of Yongjiang River, located in Zhejiang Province, southeastern part of China. The watershed area is 259 km
2 and the elevation ranges from 59 m to 976 m. The region has a typical subtropical monsoon climate. The average annual temperature is 16.3
C with minimum and maximum temperatures occurring in January and July, respectively. The mean annual precipitation is about 2000 mm with most of the rainfall occurring between March and September. There are three rainfall gauging stations: Jiaokou, Xianiutang and
Hualongzhuang and one stream flow gauging station. The watershed location, elevation, distribution of rainfall and flow gauging stations, and streams are seen in
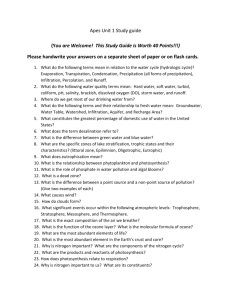
. The land cover information of the area was derived from Landsat
TM image on 18 may 1987, and the classification procedure was performed by using a Maximum-Likelihood-Classifier.
The classification process results in a land use map having
6 land use classes ( Fig. 2 ), i.e., forest (78.3%), farmland
(14.5%), grassland (2.5%), water surface (2.7%), barranland
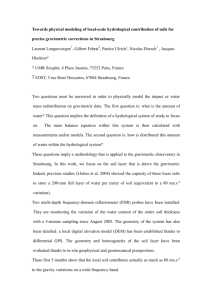
(0.4%) and settlements (1.9%). The soil types are classified into four categories (
Fig. 3 ), i.e., sandy loam (29.9%), loam
(27.5%), silty loam (40.8%) and clay (1.8%).
A total of 9 isolated storms with observed runoff responses were selected to calibrate and verify the model.
The spatial distribution of rainfall for each storm was calculated by the inverse distance weighted method.
The digitized contour maps (1:50,000 scale) are used to generate DEM by using the Kriging interpolation method.
To avoid producing a large number of pixels for the catchment, 100 m was selected as the size of each grid, even then the total grid cells reached 25,900. The DEM was then used to derive hydrologic parameters of the watershed, such as slope, flow direction, flow accumulation and stream network. The slope for each cell was calculated in the direction of the steepest flow path, the slope of cells in flat areas is assigned to 0.02. For stream network delineation, depressions resulted from reservoirs and elevation data or DEM generation method were removed by raising elevations within the depression to the elevation of its lowest overflow. The flow directions in flat areas were designated by the use of flow direction GIS function. Once flow direction for each cell was identified, the flow path and computation sequencing (cascade system) were determined, and flow
Development and testing of a simple physically-based distributed rainfall-runoff model 339
Figure 1 Location of the stations and the catchment in the map of PR China.
Figure 2 The land use map of the basin.
Figure 3 The soil type map of the basin.
accumulation area (number of cells) for each cell was also calculated. Using the threshold number, the channel cells were identified and stream network was delineated.
The soil parameters of each hillslope cell needed for subsurface flow are saturated hydraulic conductivity, porosity, and volumetric content at field capacity. The soil data were derived from soil type maps in this study. Each soil type is related to a soil textural class, and from each soil textural class a representative value for saturated hydraulic conductivity is obtained following
Rawls et al. (1983) and Smemoe et al. (2004). Some of these parameters are shown in
1, as an example. The spatial pattern of saturated hydraulic
conductivity is calculated using soil type maps, which is then used as the initial value for the model. Porosity and volumetric content at the field capacity for each soil type are determined from Figure 6.4 of the book of
340
Table 1 Parameter values for different types of soil
Soil type
Porosity (%)
Volumetric water content at field capacity (%)
Saturated hydraulic conductivity (cm/h)
Sandy loam
47
13
1
Loam
48
20
0.64
Silty loam
49
22
0.38
J. Du et al.
Clay
54
28
0.03
Table 2 Manning’s roughness coefficients of different land-use
Land use type River Barranland Grassland
Roughness coefficient 0.02
0.03
0.05
Paddy field
0.03
Settlement
0.03
Forest
0.04
(2002). The top values of porosity and bottom values of vol-
umetric content at field capacity are selected from
considering the existence of relatively large pores in humid forest regions.
The spatial distribution of Manning’s roughness coefficient of each overland flow cell is determined based on the values published in the literature for an appropriate land cover (
Dingman, 2002; Chow et al., 1988 ).
The Manning’s roughness coefficient of each channel cell is assigned to 0.02.
The soil depth was set to be 0.7 m for all cells over the catchment, which is the average depth of an adjacent basin calculated using field data.
In order to determine the spatial pattern of initial soil water content at the beginning of all storm events, a parameter, S ini was defined as the ratio of initial soil water content to the saturated water content. In the study, S ini is calibrated, since the field observation data is lacking. Such an assumption is widely used in event based modeling (
Julien et al., 1995; Wang and Hjelmfelt, 1998; Jain et al.,
S ini is determined, the initial soil water content at each cell can be calculated by multiplying S ini with saturated water content for each cell with certain soil type. The most suitable value of S ini is obtained to satisfy the condition of volume conversation index (VCI) close to 1 (see next section).
Model evaluation criteria
For evaluating the performance of the model, many criteria can be used, depending on the purpose of the study. Each criterion has its own strengths and weakness, and the results of these criteria complement each other. In this study, four evaluation criteria are used, i.e., the model efficiency coefficient ( R
2
), volume conversation index (VCI), absolute error of the time to peak ( D T ), and relative error of the peak flow rate ( d P max
). The values of R 2 and VCI were calculated, respectively, as
R
2
VCI
¼ 1
P
N
P
N i ¼ 1
ð Q
P
N i ¼ 1
ð Q i cal obs obs i
¼ P i ¼ 1
N i ¼ 1
Q
Q i obs i
Q cal i
Q Þ
Þ
ð
ð
20
21
Þ
Þ where Q obs i is the observed runoff at time i , Q cal i is the predicted runoff at time i , and Q is the mean observed runoff over all time steps. Obviously, a bigger R
2 value (close to 1) means a better fit of the predicted time series to the observed one, while the bias of the total volume is better represented by VCI. A small bias of the simulation result gives a
VCI value close to 1.
Results and discussion
Model calibration
) was used for model calibration. As a physically-based model, the number of parameters needed for calibration should be kept to a minimum. A preliminary analysis of model parameters demonstrated that the saturated hydraulic conductivity ( Ks ) and Manning’s roughness coefficients ( n ) were the most sensitive ones and needed to be calibrated. As different soil types and land use types have different Ks and n values, it is impossible to calibrate these two parameters for each cell. To simplify model calibration, two basin-wide multipliers ( M n and M k
) were used to adjust n and Ks : the multipliers scale the element input parameters while maintaining the relative differences within spatial patterns. Using a ‘‘basin-wide
multiplier’’ ( Vertessy et al., 2000
) or a ‘‘reduction factor’’
( Giertz et al., 2006 ) is a common consideration in calibrat-
ing physically based parameters of distributed models, which can retain the spatial variability and simplify the model calibration. Using this approach, the overall dimension of the adjustable parameter space remains small, and
Table 3 The pareto solutions of multipliers M n and M k
Pareto solutions { M n
, M k
} R 2 VCI d P max
D T
{1, 13}
{4, 17}
{4, 19}
{7, 17}
{7, 19}
{10, 19}
{13, 7}
{13, 17}
{16, 17}
{19, 19}
0.92
0.96
0.96
0.97
0.97
0.97
0.95
0.96
0.95
0.94
1.00
1.00
1.00
0.98
0.98
0.97
0.91
0.95
0.94
0.93
0.31
0.21
0.21
0.15
0.15
0.11
0.11
0.06
0.03
0.00
1.5
0.5
0.5
0.5
0.5
0.0
0.0
0.5
0.5
1.0
Development and testing of a simple physically-based distributed rainfall-runoff model
the over-parameterization problem can be avoided ( Refsgaard, 1997).
In order to get a suitable pair of multipliers M n and M k
, a sequential multiobjective analysis was performed by analyzing model evaluation criteria estimated with model runs for a set of M n and M k
. From a multi-criteria point of view, there is no single optimal pair of M k
M n
= 7, M k and M n
, but some compromise pairs, i.e., the Pareto solutions (
exist (see
). For the sake of discussion, the set
= 11 is written as {7, 11}. Sets {7,13} {7,15}
{7,17} {7,19} {8,13} {8,15} {8,17} {8,19} can make R
2 maximal, but not all of them can lead to best values for all other criteria at the same time. In our study, the selection of the final Pareto solution was made by using the sequential multiobjective analysis technique. The acceptable thresholds
1.00
0.95
0.90
0.85
341 for the criteria were: R
2
P 0.95, VCI P 0.95, d Pmax 6 0.1, and D T 6 0.5. The aim of sequential multiobjective analysis was to find parameter pairs that meet the above criteria thresholds.
The relationships between three model evaluation criteria ( R
2
, VCI and d P max
) and the combinations of different
M n and M k values are shown in
ship of the fourth criterion, D T with the values of M n and M k cannot be clearly shown by a graph, a table was
). From
and
it is seen that, for the efficiency R
2 criterion (
M n values of
4, 7, 10, and 13 with some combinations of M k resulted in R
2
P
b), the M n values of 4, 7, 10, and 13 with some combinations of M k
VCI P 0.95 and maintaining R
2
P 0.95. For could satisfy
D T
), the M n values of 7, 10, 13 among 4, 7, 10, and 13 with some combinations of M k could satisfy D T 6 0.5, and maintaining VCI P 0.95, R2 P 0.95; For d P max
M n value of 13 among 7, 10, and 13 with some combinations of
M
R 2 k could satisfy d P max
6 0.1, and maintaining VCI P 0.95,
P 0.95 and D T 6 0.5. Therefore, a value of 13 for M n was determined.
When M n
= 13, the M k values of 15, 17, and 19 could minimize d P max to 0.06, maintaining D T to be 0.5, and 17 and 19 could maximize VCI to 0.95, only 17 maximizes R 2 to 0.961, so a value of 17 was selected for M k
.
0.80
1 3 5 7 9 11 13 15 17 19
Mk
1.05
1.00
0.95
0.90
0.85
0.80
1 3 5 7 9 11 13 15 17 19
Mk
0.50
9
11
13
15
17
19
5
7
1
3
Table 4 The calculated D T with different combinations of
M n and M k
M k
M n
1
1.5
1.5
1.5
1.5
1.5
1.5
1.5
1.5
1.5
1.5
4
1.0
0.5
0.5
0.5
0.5
0.5
1.0
1.0
1.0
1.0
7
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
10
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
13
0.5
0.5
0.5
0.5
0.5
0.5
0.0
0.0
0.0
0.0
16
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
19
1.0
1.0
1.0
1.0
1.0
1.0
0.5
0.5
1.0
1.0
0.40
0.30
0.20
0.10
0.00
1 3 5 7 9 11 13 15 17 19
Mk
Mn=1
Mn=13
Mn=4
Mn=16
Mn=7
Mn=19
Mn=10
Figure 4 The relationships between the values of the evaluation criteria, R
2
, VCI, and d P max and the changing values of M k and M n for storm 79.
1200
1000
800
Storm 79
60
400
200
0
0 48 96 144
Time (0.5 h)
192 240
Figure 5 Comparison of the observed (solid line) and calibrated (dashed line) discharges for storm 79.
342
With such M n values, Manning’s roughness coefficient can reach 0.6, which is higher than the commonly reported values in the literature, although
noted that n could exceed 1.0 for extremely dense vegetation, and
Vertessy and Elsenbeer (1999) calibrated
n to be between
0.7 and 1.2.
With M k
= 17, the calculated values of Ks ranged from
0.51 cm/h to 17 cm/h, which is what one could expect be-
J. Du et al.
cause of the existence of relatively large pores. With the values of M k
= 17 and M n
= 13, the following model evaluation criteria values were obtained: R
2
= 0.961, VCI = 0.95, d P max
= 0.06, and D T = 0.5, respectively. The observed and calibrated discharges are compared in
for storm 79.
As can be expected from the values of the evaluation criteria, the results showed that there was an overall agreement between observed and calibrated discharges.
1000
800
Storm 20
1500
Storm 90
600
400
200
1200
900
600
300
0
0 48 96
Time (0.5 h)
144 192
0
0 48
Time (0.5 h)
96
1800
1500
1200
900
600
300
0
0
Storm 81
1800
1500
1200
900
600
300
0
0
Storm 92
48 96 144
Time (0.5 h)
192 240 288 48 96 144
Time (0.5 h)
192 240
1000
800
600
400
200
Storm 87
300
250
200
150
100
50
0
Storm 211
0
0 48 96 144 192 240 288 336
Time (0.5 h)
0 48
Time (0.5 h)
96 144
1800
1500
1200
900
600
300
0
0 48
Time (0.5 h)
96
Storm 88
144
250
200
150
100
50
0
0 48 96 144
Time (0.5 h)
Storm 212
192 240
Figure 6 Comparison of the observed (solid line) and simulated (dashed line) discharges for the 8 storms used for verification.
Development and testing of a simple physically-based distributed rainfall-runoff model
Model verification
Eight storms were used to verify the model using the parameter values determined by calibration. Comparison of observed and simulated discharges is shown in
and summary values of the evaluation criteria for the eight verification storm runoff events are presented in
. It is seen that the simulated flood hydrographs demonstrated a close agreement with the observed hydrographs for all 8 storm events. The relative error of peak flow was generally within 10% and the efficiency was higher than 0.9 in 5 of the flood hydrographs.
It can also be seen that the simulation results for storms numbered 81, 88, and 212 were not as good as for others; this is because of some special features of these storms. Storm
81 has an average total rainfall of 459 mm, while the observed runoff reaches 456 mm. This means that either there is an error in observations or there is a carry-over of runoff from the pervious storm. In this case, even if we set the initial degree of saturation to be 100%, the simulated peak flow was still considerably lower than the observed one. The ob-
Table 5 The summary of the verification results
No. of storm
R 2 VCI Calculated peak flow rate (m 3 /s) d P max
D T (h)
20
81
87
88
90
92
211
212
0.97
0.97
0.93
0.96
0.95
1.12
0.81
1.20
0.97
0.99
0.93
1.08
0.96
1.02
0.83
0.81
684
1289
896
1301
1180
1501
261
211
0.08
0.21
0.01
0.13
0.02
0.01
0.08
0.07
1
0.5
0.5
0.5
5
1.5
0
1.5
Note: R
2
= Model efficiency coefficient, VCI = volume conversation index, D T = absolute error of the time to peak, and d P max
= relative error of the peak flow rate.
Concluding remarks
343 served hydrograph of storm event 88 has too steep a rising climb to be simulated well, which is probably caused by data error. The hydrograph of storm event 212 has rising climbs with long and large pre-storm runoff rates that decrease the modeling efficiency. Nevertheless, the results in general are acceptable with the lowest R
2 value of >0.8.
Sensitivity analysis
In order to check as to the extent model simulations were affected by soil water content at the field capacity, the soil water content at the field capacity, h m
, for each soil type was changed from the bottom values to the top values
(Fig. 6.4 in
Dingman, 2002 ) and the resulting changes in
the evaluation criteria are shown in
(numbers with italic). It is seen that there is little influence on the simulation results, with the maximum changes among eight storms being 0.01 for R
2
, 0.04 for VCI , 0.02 for d P max and 1 for D T , respectively.
Several studies have shown that the initial soil moisture
1998; Merz and Plate, 1997; Zehe et al., 2005). In our study,
the initial degree of soil water saturation was increased and decreased by 5% to evaluate the effect on model simulation.
Our results (
) also showed that the initial degree of saturation has a larger influence on model results than have the h m values for all storm events.
In this study, a physically-based distributed rainfall-runoff model was developed and tested for predicting storm runoff from a humid forested catchment. In the model, the movement of water in soil and on the surface is represented at a point by a kinematic wave approach. Based on the kinematic wave approximation of the St. Venant equations, a simple one dimensional hydrodynamic streamflow routing model is used to simulate the channel network flow. While
Table 6 The sensitivity analysis of the verification storms
Change of evaluation criteria
D R 2
Change of parameters
Initial soil moisture increase 5%
Initial soil moisture increase 5% h m changes from bottom to top values
81
0.02
0
0
87
0.03
0.02
0
88
0.04
0.05
0.01
90
0.03
0
0
92
0
0
0
20
0.02
0
0.01
211
0.06
0.05
0
212
0.03
0.09
0
D
D
VCI d P max
Initial soil moisture increase 5%
Initial soil moisture increase 5% h m changes from bottom to top values
Initial soil moisture increase 5%
Initial soil moisture increase 5% h m changes from bottom to top values
0.02
0.01
0
0.02
0.03
0
0.02
0.02
0.02
0.03
0.04
0
0.06
0.06
0.02
0.11
0.11
0
0.04
0.04
0
0.02
0.03
0
0.02
0.02
0.01
0.03
0.03
0.02
0.02
0.03
0.04
0.04
0.03
0
0.12
0.11
0.01
0.22
0.08
0
0.09
0.08
0.02
0.27
0.22
0
D ( D T ) Initial soil moisture increase 5%
Initial soil moisture increase 5% h m changes from bottom to top values
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0.5
0
0
0
0.5
1
The values in the table show the changes of the evaluation criteria with initial soil moisture saturation increasing 5% and decreasing 5%, and with h m changes from bottom to top values, respectively.
344 retaining a relatively simple structure, all the parameters employed in the model are physically based and most of them can be determined using physical catchment characteristics data. Like most other physically-based models, calibration or tuning of some more sensitive parameters is still needed to get best results. Parameter sensitivity analysis shows that the saturated hydraulic conductivity and
Manning’s roughness coefficient need to be calibrated for each cell. To reduce the amount of computation, avoid
the problem of over-parameterization ( Beven, 1996 ) and
retain the spatial variability, two multipliers were set to scale the spatial patterns of both saturated hydraulic conductivity and Manning’s roughness coefficient. The following conclusions can be drawn from the study: (1)
The relative simple model developed and tested in this paper can yield promising results in simulating storm runoff in a humid forest region. (2) A multiobjective analysis
(sequential optimization method) proved to be effective to search for the Pareto solution. (3) From the sensitivity study it was found that the initial state of soil moisture was an important factor for all evaluation criteria.
It is worth of noting that the present version of the model is event based and cannot be used for long-term continuous simulation. The errors in the model outputs may arise from an incorrect representation of the processes involved in the relationship between runoff and controlling input variables, from poor estimation of model parameters, from the assumptions made to simplify the model and calculation, from the random and systematic errors of all the input data, and from the spatial and temporal resolution of rainfall and the antecedent moisture condition, etc. The model is developed for modeling the saturation overland flow dominated runoff production mechanism, and it is more suitable in mountain areas with large slope where the kinematic wave approximation of Saint-Venant equations could be used as the representation of water movement in hillslopes and river networks. The lakes and reservoirs are not considered in the model. Proper calibration of some model parameters such as Ks and n is still necessary. The calibration approach using basin-wide multipliers can avoid the overparameterization problem, but the obtained effective parameters account for all errors in the model structure, spatial parameter structure and input data; the source of error then remains unknown. Furthermore, the assumption that the mean soil depth is 0.7 m will influence runoff generation, which cannot be quantified in the study due to the lack of field measurement data. In the present study no attempt was made to quantify the sources of error, and it will be considered hopefully in future studies.
Acknowledgements
This work was supported by the National Natural Science
Foundation of China under grant 40171015. The author would like to thank the reviewers for their valuable comments.
References
Abbott, M.B., Bathurst, J.C., Cunge, J.A., O’Connell, P.E., Rasmussen, J., 1986a. An introduction to the European Hydrologic,
J. Du et al.
System–Syst‘eme Hydrologique Europ’een, ‘SHE’ 1: history and, philosophy of a physically based, distributed modelling system.
Journal of Hydrology 87, 45–59.
Abbott, M.B., Bathurst, J.C., Cunge, J.A., O’Connell, P.E., 1986b.
An introduction to the European Hydrologic System–Systeme
Hydrologique Europeen, ‘SHE’ 2: structure of a physically based, distributed modelling system. Journal of Hydrology 87, 61–77.
Arora, V., Seglenieks, F., Kouwen, N., Soulis, E., 2001. Scaling aspects of river flow routing. Hydrological Processes 15, 461–
477.
Barcelo, M.D., Nieber, J.L., 1982. Influence of a soil pipe network on catchment hydrology. Pap Am Agric Eng. 82-2027, 1–27.
Beven, K.J., 1981.
Kinematic subsurface stormflow.
Water
Resources Research 17 (5), 1419–1424.
Beven, K.J., 1982. On subsurface stormflow: prediction with simple kinematic theory for saturated and unsaturated flows. Water
Resources Research 18 (6), 1627–1633.
Beven, K.J., 1996. A discussion of distributed hydrological modeling. In: Abbott, M.B., Refsgaard, J.C. (Eds.), Distributed Hydrological Modeling. Kluwer Academic, pp. 255–278.
Beven, K.J., 2001. Rainfall-runoff Modeling: A Primer. Wiley, West
Sussex, pp. 217–254.
Beven, K.J., Germann, P., 1982. Macropores and water flow in soils.
Water Resources Research 18 (5), 1311–1325.
Beven, K.J., Kirkby, M.J., 1979. A physically based, variable contributing area model of basin hydrology. Hydrological Science Bulletin 24 (1), 43–69.
modelling: a review. Hydrological Processes 9, 251–290.
Bronstert, A., Plate, E., 1997. Modelling of runoff generation and soil moisture dynamics for hillslopes and microcatchments.
Journal of Hydrology 198, 177–195.
Calver, A., Wood, W.L., 1995. The Institute of hydrology distributed model. In: Singh, V.P. (Ed.), Computer Models of Watershed
Hydrology. Water Resource Publications, Colorado, pp. 595–
626.
Chow, V.T., Maidment, D.R., Mays, L.W., 1988. Applied Hydrology.
McGraw-Hill Book Company, p. 627.
Ciarapica, L., Todini, E., 2002. TOPKAPI: a model for the representation of the rainfall-runoff process at different scales.
Hydrological Processes 16, 207–229.
Coles, N.A., Sivapalan, M., Larsen, J.E., Linnet, P.E., Fahrner, C.K.,
1997. Modelling runoff generation on small agricultural catchments: can real world runoff responses be captured? Hydrological Processes 11, 111–136.
Dingman, S.L., 2002. Physical Hydrology. Prentice-hall, p. 642.
Dunne, T., Black, R.D., 1970. An experimental investigation of runoff production in permeable soils. Water Resources Research
6, 478–490.
Dunne, T., Moore, T.R., Taylor, C.H., 1975. Recognition and prediction of runoff-producing zones in humid regions. Hydrological Science Bulletin 20 (3), 305–327.
Eagleson, P.S., 1970. Dynamic Hydrology. McGraw Hill, New York.
Fan, Y., Bras, R., 1998. Analytical solutions to hillslope subsurface storm flow and saturation overland flow. Water Resources
Research 34 (4), 921–927.
Fipps, G., Skaggs, R.W., 1989. Influence of slope on subsurface drainage of hillsides. Water Resources Research 25 (7), 1717–
1726.
Freeze, R.A., 1972a. Role of subsurface flow in generating surface runoff, 1, base flow contributions to channel flow. Water
Resources Research 8 (3), 609–623.
Freeze, R.A., 1972b. Role of subsurface flow in generating surface runoff, 2, upstream source areas. Water Resources Research 8
(5), 1272–1283.
modelling of hydrological processes in a tropical headwater catchment in Benin (West Africa) – process representation and
Development and testing of a simple physically-based distributed rainfall-runoff model multi-criteria validation. Hydrology and Earth System Sciences
Discussions 3, 1–57.
Grayson, R.B., Moore, I.D., MaMahon, T.A.C., 1992. Physicallybased hydrologic modelling: I. A terrain-based model for investigative purposes. Water Resources Research 28 (10),
2639–2658.
Grayson, R.B., Bloschl, G., Moore, I.D., 1995. Distributed parameter hydrologic modeling using vector elevation data: THALES and TAPES-C. In: Singh, V.P. (Ed.), Computer Models of
Watershed Hydrology. Water Resources Publications, Highlands
Ranch, Colorado, pp. 669–696 (Chapter 19).
Gupta, H.V., Sorooshian, S., Yapo, P.O., 1998. Toward improved calibration of hydrologic models: multiple and non-commensurable measures of information. Water Resources Research 34
(4), 751–763.
Hewlett, J.D., Hibbert, A.R., 1967. Factors affecting the response of small watersheds to precipitation in humid areas. In: Sopper,
W.E., Lull, H.W. (Eds.), Forest Hydrology. Pergamon, Oxford, pp. 275–290.
Jain, M.K., Kothyarib, U.C., Ranga Raju, K.G., 2004. A GIS based distributed rainfall-runoff model. Journal of Hydrology 299,
107–135.
Julien, P.Y., Saghafian, B., Ogden, F.L., 1995. Raster based hydrological modeling of spatially-varied surface runoff. Water
Resources Bulletin 31 (3), 523–536.
Kibler, D.F., Woolhiser, D.A., 1972. Mathematical properties of the kinematic cascade. Journal of Hydrology 15, 131–145.
Kirkby, M., 1988. Hillslope runoff processes and models. Journal of
Hydrology 100, 315–339.
Kouwen, N., Soulis, E.D., Pietroniro, A., Donald, J., Harrington,
R.A., 1993. Grouping response units for distributed hydrologic modelling. ASCE Journal of Water Resources Management and
Planning 119 (3), 289–305.
Liang, X., Lettenmaier, D.P., Wood, E.F., Burges, S.J., 1994. A simple hydrologically based model of land surface water and energy fluxes for GSMs. Journal of Geophysical Research 99 (D7),
14415–14428.
Merz, B., Bardossy, A., 1998. Effects of spatial variability on the rainfall runoff process in a small loess catchment. Journal of
Hydrology 212–213, 304–317.
Merz, B., Plate, E.J., 1997. An analysis of the effects of spatial variability of soil and soil moisture on runoff. Water Resources
Research 33 (12), 2909–2922.
Mosley, M.P., 1979. Streamflow generation in a forested watershed,
New Zealand. Water Resources Research 15 (4), 795–806.
Nieber, J., 1982. Hillslope soil moisture flow, approximation by a one-dimensional formulation. Paper 82-2026. American Society of Agricultural Engineers, St. Joseph, MI, 28 p.
Nieber, J., Walter, M., 1981. Two-dimensional soil moisture flow in a sloping rectangular region: experimental and numerical studies. Water Resources Research 17 (6), 1722–1730.
Niehoff, D., Fritsch, U., Bronstert, A., 2002. Land-use impacts on storm-runoff generation: scenarios of land-use change and simulation of hydrological response in a meso-scale catchment in SW-Germany. Journal of Hydrology 267, 80–
93.
Paniconi, C., Wood, E., 1993. A detailed model for simulation of catchment scale subsurface hydrologic processes.
Water
Resources Research 29 (6), 1601–1620.
Pikul, M., Street, R., Remson, I., 1974. A numerical model based on coupled one-dimensional Richards and Boussinesq equations.
Water Resources Research 10 (2), 295–302.
Rawls, W.J., Brakensiek, D.L., Miller, N., 1983. Green–Ampt infiltration parameters from soils data. ASCE Journal of Hydraulic Engineering 109 (1), 62–70.
Refsgaard, J.C., 1997. Parameterisation, calibration and validation of distributed hydrological models. Journal of Hydrology 198,
69–97.
345
Reggiani, P., Sivapalan, M., Hassanizadeh, S.M., 1998. A unifying framework for watershed thermodynamics: balance equations for mass, momentum, energy and entropy and the second law of thermodynamics. Advances in Water Resources 22 (4),
367–398.
Reggiani, P., Hassanizadeh, S.M., Sivapalan, M., Gray, W.G.,
1999. A unifying framework for watershed thermodynamics: constitutive relationships. Advances in Water Resources 23
(1), 15–39.
Schulla, J., 1997. Hydrologische Modellierung von Flussgebieten zur
Shen, H.W., Julien, P.Y., 1992. Erosion and sediment transport. In:
Maidment, D. (Ed.), Handbook of Hydrology. McGraw-Hill, New
York, pp. 12.1–12.61 (Chapter 12).
Sidle, R.C., Tsuboyama, Y., Noguchi, S., Hosoda, I., Fujieda, M.,
Shimizu, T., 2000. Stormflow generation in steep forested headwaters: a linked hydrogeomorphic paradigm. Hydrological
Processes 14, 369–385.
Singh, V.P., 1996. Kinematic Wave Modelling in Water Resources:
Surface Water Hydrology. Wiley, New York, p. 1399.
Singh, V.P., 1997. Kinematic Wave Modeling in Water Resources:
Environmental Hydrology. John Wiley, New York.
Singh, V.P., Woolhiser, D.A., 1996. A nonlinear kinematic wave model for watershed surface runoff. Journal of Hydrology 31,
221–243.
Sloan, G.P., Moore, I.D., 1984. Modelling subsurface stormflow on steeply sloping forested watersheds. Water Resources Research
20 (12), 1815–1822.
Smemoe, C.M., Nelson, E.J., Zhao, B., 2004. Spatial averaging of land use and soil properties to develop the physically-based green and ampt parameters for HEC-1. Environmental Modelling and Software 19, 525–535.
Smith, R.E., Woolhiser, D.A., 1971. Overland flow on an infiltrating surface. Water Resources Research 7 (4), 899–913.
Tani, M., 1987. On researching effects of forest soil on runoff properties. Water Science 177, 35–61 (in Japanese).
Tani, M., 1997. Runoff generation processes estimated from hydrological observations on a steep forested hillslope with a thin soil layer. Journal of Hydrology 200, 84–109.
Todini, E., 1996. The ARNO rainfall-runoff model. Journal of
Hydrology 175, 339–382.
Troch, P., van Loon, E., Hilberts, A., 2002. Analytical solutions to a hillslope-storage kinematic wave equation for subsurface flow.
Advances in Water Resources 25, 637–649.
Troch, P., Paniconi, C., van Loon, E., 2003. The hillslope-storage
Boussinesq model for subsurface flow and variable source areas along complex hillslopes: 1. Formulation and characteristic response. Water Resources Research 39 (11), 1316.
Troch, P.A., van Loon, A.H., Hilberts, A.G.J., 2004. Analytical solution of the linearized hillslope-storage Boussinesq equation for exponential hillslope width functions. Water Resources
Research 40, W08601. doi: 10.1029/2003WR002850.
Tsuboyama, Y., Sidle, R.C., Noguchi, S., Hosoda, I., 1994. Flow and solute transport through the soil matrix and macropores of a hillslope, segment. Water Resources Research 30, 879–
890.
Verhoest, N., Troch, P., 2000. Some analytical solutions of the linearized Boussinesq equation with recharge for a sloping aquifer. Water Resources Research 36 (3), 793–800.
Vertessy, R.A., Elsenbeer, H., 1999. Distributed modeling of storm flow generation in an Amazonian rainforest catchment: Effects of model parameterization. Water Resources Research 35 (7),
2173–2187.
Vertessy, R.A., Hatton, T.J., O’Shaughnessy, P.J., Jayasuriya,
M.D.A., 1993. Predicting water yield from a mountain ash forest using a terrain analysis based catchment model. Journal of
Hydrology 150, 665–700.
346
Vertessy, R.A., Elsenbeer, H., Bessard, Y., Lack, A., 2000. Storm runoff generation at La Cuenca. In: Grayson, R., Bloschl, G.
(Eds.), Spatial Patterns in Catchment Hydrology: Observations and Modeling. Cambridge University Press, Cambrige, United
Kingdom.
Wang, M., Hjelmfelt, A.T., 1998. DEM based overland flow routingmodel. ASCE Journal of Hydraulic Engineering 3 (1), 1–8.
Whipkey, R.Z., 1965. Surbsurface stormflowfrom forested slopes.
Int. Assoc. Sci. Hydro. Bull. 10 (2), 74–85.
J. Du et al.
Woolhiser, D.A., 1996. Search for physically based runoff model – a hydrologic El Dorado? Journal of Hydraulic Engineering 122 (3),
122–129.
Zehe, E., Becker, R., Bardossy, A., Plate, E., 2005. Uncertainty of simulated catchment scale runoff response in the presence of threshold processes: role of initial soil moisture and precipitation. Journal of Hydrology 315 (1–4), 183–202.
Zhao, R.J., 1992. The Xinanjiang model applied in China. Journal of
Hydrology 135, 371–381.