Finite element simulation of acoustic fields with Diffpack
advertisement

Finite element simulation of acoustic fields with Diffpack
Åsmund Ødegård
aasmundo@ifi.uio.no
Paul D Fox
fox@ifi.uio.no
Sverre Holm
sverre@ifi.uio.no
Aslak Tveito
aslak@ifi.uio.no
Department of Informatics, University of Oslo, P.O. Box 1080, Blindern, N-0316 Oslo, Norway
Tel : +47 22852410, Fax : +47 22852401
1 Introduction
This article reports some preliminary results in the development of a finite element simulator for ultrasonic fields
using the numerical programming library Diffpack. In our present work, we are combining the study of linearly–
based limited diffraction beams (Bessel beams and X–Waves) with the development of a finite element package
for analysis of linear and nonlinear media in order to compare how such waves behave in the two cases.
2 Propagation Models, Bessel Beams and X–Waves
Bessel beams [1] and X-Waves [2] are limited diffraction solutions to the lossless linear wave equation
"!
(1)
in which is the speed of sound. One variant of Bessel beams and X-Waves are those of order zero
#$&% ('*)+-,.# /1032547698;:=<>
-#$I%; J
G
# KILNM OQPSR
?@/BABAC/BDE?F/BG+H
G
)
) UT -%WV1X K O ZY [
(2)
]\ G+^=/+_
(3)
G
)
These exhibit circular symmetry and are therefore well suited to implementation on annular arrays. Here
is a
constant, is the frequency, is the distance from the centerline of the transducer, is the propagation distance
from the transducer surface, and , are design parameters with
. See [3, 4, 5] for details
of design and implementation. For the purposes of simulation, we use the real parts of (2), (3) to generate the
transducer surface pressure excitation at
. The domain of computation is taken to be a box
over
positive time and with initial condition
`
#
%
a c
b `ed , O ,
%f
gE"h
- ) *) i U
(4)
) Ej i (5)
) is the steady state (atmospheric) pressure. The boundary k of the domain is then divided into two
where
k
l
klkm such that nl is the part of the boundary on which the ultrasound transducer is located, and
parts,
nl m is theand
l , and in the latter region we adopt a
remainder. The waves in (2,3) are generated on the transducer
first order non-reflecting boundary [6]
p
n l m
o U
;
i
(6)
The longterm objective of our work is then to compare how the Bessel beams and X–Waves behave under the
idealised lossless linear conditions of (1) and the more complex lossy nonlinear propagation conditions defined in
[7, 8] by the system
@Cq q P p ) {
q P 9qy
" !
P
q
F
w
tr svu s ;
.x s h
Ejz-
q P}|;~ ]Q P 9q
v Sp"!
{ )C -
) q
| ~ { ) w ; x 7{ )+ q9q q
Here, is the velocity potential, { ) is the density and s u s and s h
(7)
are given constants.
3 Numerical Method
; ; - Our approach is to use a Galerkin finite element method in the space domain, combined with a finite difference
approximation of the time derivatives. Consider the linear model (1). Assume that
is the pressure at
time
Then a semi-discrete implicit scheme for the problem is given by
o _
C
U_
! u
! u P 8 u S
(8)
j
; Q -@ and apply
Assume now that 9F9N u is a finite element basis for the solution space such that
integration by H parts to the second order derivative in space, using the non–reflecting boundary condition (6). This
yields a set of equations for the unknowns:
WC; m 03 o P 0 P
0 t u
o P p 8 u 0 T _1_9_ H
W C m 0
^= is defined as the integral of the functions and ^ over the solution domain
Here the inner product -.
^=
^
-. = (9)
For the linear case, the problem then formulates into a linear problem of the type
at each timestep, which
is solved with e.g. a Krylow subspace method such as Conjugate Gradients. For the nonlinear case, we obtain a
nonlinear discrete problem which is solved with an iterative method, e.g. Newton–Raphson iterations, at each time
step.
4 Diffpack Simulator
The simulator is implemented using the numerical Finite Element computational library Diffpack[9]. This package
is well suited to the simulation of ultrasound fields due to its versatility in structure and adaptability to simulation of
different propagation conditions. The simulator is implemented as a class in C++, derived from the Finite Element
solver class in Diffpack, and handles both pulsed and continuous wave 3D simulations. Inhomogeneous media is
handled by introducing the speed of sound as a field over the finite element grid.
5 Results, Conclusion and Further Work
"h
O ¡*¢
¤ ¥ _ ¦ HpH _
¡ *§
As examples of the linear work we illustrate small scale nearfield simulations for pulsed Bessel beams (7-lobes)
and X-Waves from a 6mm diameter transducer. The fields are solved in an
box measuring 10mm wide x 10mm
high x 7mm deep. For the X–Wave, we use
[2] and
. Using a 2.5MHz transducer in
water (speed of sound
), produces a wavelength
. The finite element grid was defined
to provide 10 times oversampling of this wavelength, needing approximately
nodes. The solver then
requires 1140MB of memory to solve this problem. The time step is set such that the wave is sampled at 20 times
the frequency, which gives
for the given nominal frequency of 2.5MHz.
¡$£+ H d A
_ 8k¨
G
_ p
H H
+¡
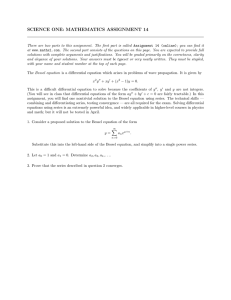
) (a) Bessel beam
(b) X–Wave
Figure 1: Snapshots of pulsed beams. Direction of travel : bottom right to top left
In Figures 1a and 1b we show snapshots of the pulsed Bessel beams and X-Waves traveling through homogeneous media. The figures depict x–y plane cuts through the center of the transducer for each case. We note
features such as trailing ripples behind the main pulse which are not predicted by continuous-wave solutions (2)
and (3). The cpu time used to solve the problem for the pulsed Bessel Beam travelling through the domain was
1.66 hours and for the X–Wave was 4.35 hours. In Figures 2a and 2b, the maximum field intensity at each point
in space for the same pulses having passed through an inhomogeneous media boundary are given. Here, a change
) to muscle (
) is included in the form of an abrupt boundin media from human fat (
ary change angled at 45 degrees from bottom right to top left. In both cases the diffraction effects at the media
boundary are visible. Notably we observe the nondiffracting property of the Bessel beam close to the transducer
surface degrading considerably upon impact with the media boundary. This property is not evident either from the
continuous wave solutions to the homogeneous wave equation (1). Our initial results therefore suggest that finite
elements exhibit strong potential for flexible and realistic simulation of ultrasound pulses, although techniques to
reduce the memory demands of the current solver also need to be investigated in order to enable solution of larger
scale simulations.
©Fª¬«1­+®+¯B°±³²
(a) Bessel beam
©Fªg«C´+¯=«1°±³²
(b) X–Wave
Figure 2: Maximum intensities in inhomogeneous media. Direction of travel : bottom to top
References
[1] J. Durnin. Exact solutions for nondiffracting beams. J. Opt. Soc. Am, 4(4), 1987.
[2] J.-Y. Lu and J.F. Greenleaf. Nondiffracting x–waves — exact solutions to free–space scalar wave equation
and their finite aperture realizations. IEEE Transaction on Ultrasonics, Ferroelectrics and Frequency control,
39(1), 1992.
[3] J.-Y. Lu. Designing limited diffraction beams. IEEE Transaction on Ultrasonics, Ferroelectrics and Frequency
control, 44(1), 1997.
[4] S. Holm. Bessel and conical beams and approximation in annular arrays. IEEE Transaction on Ultrasonics,
Ferroelectrics and Frequency control, 45(3), 1998.
[5] P.D. Fox and S. Holm. Effects of parameter mismatch in ultrasonic bessel transducers. Proc. IEEE Norwegian
Signal Processing Symposium NORSIG’99, 1999.
[6] Bjorn Engquist and Andrew Majda. Absorbing boundary conditions for the numerical simulation of waves.
Mathematics of computation, 31(139), 1977.
[7] S. Makarov and M. Ochmann. Nonlinear and thermoviscous phenomena in acoustics, part i. ACUSTICA acta acustica, 82, 1996.
[8] S. Makarov and M. Ochmann. Nonlinear and thermoviscous phenomena in acoustics, part ii. ACUSTICA acta acustica, 83, 1997.
[9] Hans Petter Langtangen. Computational Partial Differential Equations, Numerical methods and Diffpack
programming, volume 2 of Lecture notes in computational science and engineering. Springer–Verlag, 1999.