Energy-Efficient Spectrum Discovery for Cognitive Radio Green Networks Yi Liu
advertisement

Mobile Netw Appl (2012) 17:64–74
DOI 10.1007/s11036-011-0307-5
Energy-Efficient Spectrum Discovery for Cognitive Radio
Green Networks
Yi Liu · Shengli Xie · Yan Zhang · Rong Yu ·
Victor C. M. Leung
Published online: 29 March 2011
© Springer Science+Business Media, LLC 2011
Abstract Cognitive Radio (CR) is an essential technique for the future generation green communication
paradigm owing to its inherent advantages of adaptability and cognition. The compulsory spectrum sensing is
a critical component to facilitate systems co-existence.
In this paper, we propose a new Time-Division Energy
Efficient (TDEE) sensing scheme in which the sensing
period is divided into an optimal number of timeslots
and each Secondary User (SU) is assigned to detect a
different channel in one time-slot. An important advantage of TDEE is that the SUs do not need to exchange
the control messages for the acknowledgement of a
successful cooperation, leading to substantial energy
saving without compromising sensing accuracy. Both
homogeneous and heterogeneous networks are investigated with respect to the intrinsic trade-off between
spectrum efficiency and energy-efficiency. Illustrative
results demonstrate that the proposed TDEE is able
to achieve much lower energy consumption and higher
throughput, compared to the existing mechanisms.
Y. Liu · S. Xie · R. Yu
School of Electronic and Information Engineering,
South China University of Technology, Guangzhou,
People’s Republic of China
In the last decade, the advances in wireless communication systems have significantly aggravated the crisis
of the compelling need of numerous radio spectrum.
With the fixed frequency allocation policy, most of
the frequency bands have been already assigned to
various wireless standards. At the same time, the Federal Communication Commission (FCC) reported that
70% of the licensed spectrum in US is rarely utilized
continuously across time and space [1].
Cognitive Radio (CR) is being considered as a highly
promising technique for addressing spectrum scarcity
and improving spectrum efficiency [2, 3]. In CR networks, the Secondary (unlicensed) Users (SUs) are
allowed to opportunistically access any idle frequency
that is originally allocated to the Primary (licensed)
Users (PUs) but currently not being occupied. To maximize the performance of the secondary networks, the
SUs are capable of adaptively tuning the transmission
power levels based on the operating scenarios to discover the spectrum opportunities without interfering
the PUs’ transmission [4, 5, 17]. Such intrinsic context-
Y. Liu
e-mail: liuii5115@yahoo.com.cn
S. Xie
e-mail: eeoshlxie@scut.edu.cn
R. Yu
e-mail: yurong@ieee.org
S. Xie · R. Yu
Guangdong University of Technology, Guangzhou,
People’s Republic of China
Y. Zhang (B)
Simula Research Laboratory, Norway; Department
of Informatics, University of Oslo, Oslo, Norway
e-mail: yanzhang@ieee.org
V. C. M. Leung
Department of Electrical and Computer Engineering,
The University of British Columbia, Canada
e-mail: vleung@ece.ubc.ca
Keywords cognitive radio networks ·
time division sensing · energy efficient
1 Introduction
Mobile Netw Appl (2012) 17:64–74
awareness and adaptability functionality make CR a
key enabler for the future generation energy-efficient
wireless systems. However, several design challenges
arise in CR due to the energy constraints, including
fast spectrum bands discovery by using low power, the
hardware-constraint accurate detection of unoccupied
spectrum and the energy-efficient scheme to exchange
control messages.
Energy efficiency is an important issue in the design
and implementation of CR systems. There are three
main reasons mandating energy saving in CR. First, the
spectrum resource for SUs is very dynamic. The spectrum availability is highly dependent on PUs’ traffic
behaviors, e.g. PUs’ random arrivals and departures on
their licensed channels. Second, the compulsory spectrum sensing in CR requires periodic detection of the
PUs’ licensed channels, which may consume excessive
energy and quickly deplete the battery-powered SUs’
energy. Finally, wireless systems are notoriously unreliable, e.g. channel fluctuations, noise and absence of
primary signals knowledge. These unpredictable parameters may significantly degrade the accuracy of the
spectrum sensing and incur data re-transmission. SUs
may prolong the sensing period to improve sensing
accuracy under the uncertain situations, which however consume more sensing energy. Several design
challenges arise in CR due to the energy constraints,
including fast spectrum bands discovery by using low
power, the hardware-constraint accurate detection of
unoccupied spectrum and the energy-efficient scheme
to exchange control messages.
In this paper, we propose a new Time-Division
Energy Efficient (TDEE) sensing scheme to significantly reduce the power consumption in CR networks. In the TDEE scheme, the total sensing period
of each SU is divided into an optimal number of timeslots. In each timeslot, each SU is assigned to detect a
different channel in one timeslot. After sensing, all SUs
shall send the sensing results to the fusion center to
make the final decision based on a fusion rule. An important advantage of TDEE is that the SUs do not need
to exchange the control messages for the acknowledgement of a successful cooperation, leading to substantial
energy saving without comprising sensing accuracy. It
is clear that more divided timeslots may lead to more
spectrum opportunities in one sensing period. Unfortunately, larger consumed energy will be incurred since
each sensing SU is not able to transmit its own data
during the sensing period. Hence, the number of divided timeslots is a crucial design parameter to balance
the energy consumption and achievable throughput.
The objective of this paper is to propose a new timedivision sensing strategy in CR networks to significantly
65
reduce the energy consumption. To achieve this, we
have three major contributions in this work.
•
•
•
We introduce a new time-division energy efficient
sensing scheme for a single SU to detect a number
of different channels within one sensing period
An analytical model is constructed to evaluate its
performance in both homogeneous and heterogenous networks
We identify the key design parameters to achieve
minimum energy consumption by considering the
trade-off between spectrum efficiency and energy
efficiency
In addition, we present extensive numerical examples
to demonstrate the energy efficiency comparing with
the existing schemes and to show the determination of
the crucial parameters. Results demonstrate that our
proposed scheme is able to achieve substantially lower
energy and higher throughput, comparing to existing
mechanisms.
The rest of the paper is organized as follows. We review the related work of energy efficient spectrum sensing in Section 2. Section 3 describes the time-division
spectrum sensing scheme and the system model. We
study the consumed energy and throughput of our proposed scheme in homogeneous and heterogeneous networks in Section 4 and Section 5, respectively. Section 6
presents the numerical results, followed by concluding
remarks in Section 7.
2 Related work
In CR systems, the spectrum sensing techniques
can be generally classified into two categories: noncooperative spectrum sensing and cooperative spectrum sensing. Figure 1 shows the difference between the non-cooperative sensing and the cooperative
sensing.
In the non-cooperative spectrum sensing scheme,
SUs should efficiently use the limited power to achieve
maximum performance due to the energy constraints.
Zhao et al. [6] proposes a cross-layer approach that
integrates spectrum sensing with medium access. In
each sensing period, an SU that has data to transmit
chooses a set of channels to sense and a subset of
channels to access based on the sensing result. Since
only part of the spectrum can be sensed at a specific
time, the consumed energy for sensing is reduced. One
of the pre-requisites in this approach is that each SU
needs to be equipped with multiple antennas in order
to detect a number of channels simultaneously, which
may quickly deplete the SU’s power. In a practical
66
Mobile Netw Appl (2012) 17:64–74
Fig. 1 The non-cooperative
sensing scheme and the
cooperative sensing scheme
Secondary User (SU)
Sensing Process
Exchanging Process
Secondary User (SU)
Sensing Process
Primary User (PU)
Primary User (PU)
Fusion Center
(a)
Non-Cooperative Sensing
CR network, the SUs generally has one antenna and
can only detect the spectrum band one by one during
the sensing period. Under this hardware constraint,
the authors in [7] incorporate sensing overhead and
the transmission limitation into the MAC layer design.
The sensing process is modeled as an optimal stopping
problem and is solved by the principle of backward
induction. In [18], the authors propose an optimized
call admission control scheme based on energy-efficient
non-cooperative sensing.
Cooperative sensing [8–10, 14, 15], has the advantage
of overcoming the hardware constraint that is an essential difficulty in the non-cooperative spectrum sensing
scheme. In cooperative sensing process, the cooperative
SUs have to spend their energy to provide the sensing
collaboration. The lifetime of the power-constrained
SUs may become quickly depleted. Hence, there is
an inherent tradeoff between energy saving and the
cooperation operation. Taking this tradeoff into consideration, Hai et al. [11] introduces an energy-efficient
cooperative spectrum sensing scheme in sensor-aided
cognitive radio networks. In the scheme, the fusion
center determines and invites a specific number of
sensors in the network to participate into a sensing
group. Then, the invited sensors independently start to
sense the spectrum and report their own observations
to the fusion center to make the final decision on the
availability of the monitored spectrum.
Another important aspect that should be taken into
account for energy saving in the cooperative sensing is
the energy consumption in the information exchanging
procedure. Although the exchanging time duration may
be shorter than the sensing period, the exchanging energy per-node is still comparable to the sensing energy
since energy consumption is equal to the product of
the power level and the using period. Furthermore,
the total exchanging energy consumption is multiplied
by the number of the cooperative SUs. Several unpredictable issues, e.g. errors of control messages and loss
of packets, may further increase the energy consumption during the message exchange. As a consequence,
the energy-saving in exchanging can not be ignored
(b)
Cooperative Sensing
in cooperative sensing. In [12], Lee et al. proposes a
scheme that targets at systems employing the cooperative spectrum sensing using voting mechanism. To reduce the exchanging cost, each SU should refrain from
sending unreliable information and cast its votes only
when it has confidence. However, energy has already
been wasted during the information transmission.
3 Time-division sensing: systems models
and mechanisms
3.1 System model
We consider a centralized CR network which has either
a Base Station (BS) in infrastructure networks, or a
cluster head in infrastructure-less networks (e.g. ad hoc
networks). When an SU joins the CR network, the BS
or cluster head designates the SU to detect the tagged
channels in a central manner. The BS or cluster head
will send a control message to the SU with the channel
information which includes the channel map and the
sensing order of each channel. The SU detects channels
in time slots according to the channel information.
The sensing-transmission operation of each SU is on
a frame-by-frame basis in CR. The whole time frame
can be divided into two parts: sensing and transmission.
Each frame has a time duration T, within which the
SUs sense the channel for the duration of Ts . If the SUs
do not detect signal from any PU over its channel, the
remaining duration of the frame Tr = T − Ts is used for
data transmission on an available channel.
We assume that each channel alternates between
state ON and state OFF, of which the OFF time is not
used by PUs and hence can be exploited by the SUs. Let
α denote the probability that the channel transits from
state ON to state OFF. Let β denote the probability
that the channel transits from state OFF to state ON.
We define the channel availability as the normalized
period which is available for SUs. Let p denote the
β
channel availability. Then, we have p = α+β
.
Mobile Netw Appl (2012) 17:64–74
67
Normal communicaton case
discover more spectrum opportunities. The collaboration operations in the heavy communication situation
may cause much higher energy consumption compared
to the normal communication situation. As a consequence, the energy consumptions during both sensing
and exchanging phases are equally important and none
of them should be ignored in either normal or heavy
communication conditions.
Power (mw)
1600
exchanging
1400
1200
sensing
1000
800
600
0
20
40
60
time (ms)
Heavy communication case
80
100
Power (mw)
1600
exchanging
1400
3.3 TDEE scheme
1200
sensing
1000
For the sake of comparison, we first show the key idea
of two sensing schemes from the perspective of the
time-frequency dimension: the non-cooperative spectrum sensing and the cooperative spectrum sensing in a
two-channel scenario. In Fig. 3a, a single SU is used for
obtaining the activity of two channels. In each sensing
slot, the SU can only sense one channel. Hence, the
total sensing time in this case is 2Ts to obtain the two
channels’ activity. Figure 3b shows that the cooperative
sensing employs two SUs to sense a different channel
at the same time. Thus, the SUs can have the activity of
two channels after Ts time duration and then send the
result to the fusion center. We note that the cooperative
sensing scheme needs to require each SU to collaboratively exchange the control packet, which will lead to
additional energy consumption.
Figure 3c shows our proposed new spectrum sensing scheme, called Time-Division Energy-Ef f icient
(TDEE) sensing scheme. In particular, the total sensing
period of each SU is equally divided into two timeslots. In the first sensing timeslot, SU 1 senses the first
channel CH1 and SU 2 senses the second channel CH2 ,
respectively. In the next timeslot, SU 1 tunes to sense
the second channel CH2 and SU 2 senses the first channel CH1 . When the sensing time of each SU expires,
800
600
0
20
40
60
80
100
time (ms)
Fig. 2 Energy consumption of a cooperative SU in normal and
heavy communication situations
3.2 Energy consumption model
Frequency
Ts
Tr
CH1
CH2
CH2
0
2Ts
0
Time
(a) Non-cooperative sensing scheme
Tr
Ts
CH1
Frequency
Fig. 3 Different sensing
schemes
Frequency
Figure 2 shows the power level used by a cooperative
SU in both normal communication and heavy communication conditions. The cooperative SU uses the
receiving power level during the sensing process. In
an exemplary unlicensed IEEE 802.11 wireless system,
the receiving power level is 1W [13]. After the sensing
phase, the cooperative SUs transit into the exchanging
phase and send the control packets to the fusion center.
Here, the transmission power level is 1.5W in in IEEE
802.11 system [13]. In the normal communication case
with relatively low sensing and exchanging operations,
the energy consumption in the sensing phase and that
in the exchanging phase are still comparable. In the
heavy communication case, more frequent sensing and
exchanging operations can be observed in order to
Ts
Time
(b) Traditional cooperative sensing scheme
Sensing behavior of SU1
Ts
Tr
Sensing behavior of SU2
CH1
CH2
0
Ts
Time
(c) Time-division sensing scheme
68
Mobile Netw Appl (2012) 17:64–74
SU 1 and SU 2 independently send the sensing results
to the fusion center for making the final decision of
two channels’ availability. It is clear that the sensing
accuracy of CH1 may be reduced if CH1 is detected
only by SU 1 with half sensing time. However, the SU 2
is employed to help SU 1 sense CH1 . Hence, the sensing
accuracy of each channel is not reduced in our scheme.
An important point is that the SUs do not need to
exchange the control messages for the acknowledgement of the successful cooperation, which is an indispensable procedure in the traditional cooperative sensing scheme. The potential advantage is the substantial
energy saving in the exchange phase.
Figure 4 shows a general case with multiple SUs in
TDEE. Let N and M denote the number of SUs and the
number of licensed channels in CR, respectively. We
consider the scenario when U (2 ≤ U ≤ min (N, M))
number of SUs need to perform channel detection. The
steps of SUs join and stop the TDEE sensing can be
described as follows:
1. Each SU joins the network; and then waits for
the channel information through a control message
sent by BS.
2. According to the channel information, the SUs will
divide their sensing period into a certain number
of timeslots and sense the distinct channel in each
time slot. After sensing for all channels, SUs will
send the sensing results to the BS.
3. When an appropriate channel is found, the BS will
broadcast the stop message to cease the TDEE
sensing. If no appropriate channels are found, the
sensing will be performed again until an appropriate channel is found.
Frequency
Again, the collaborative SUs do not need to exchange the control messages for the acknowledgement
of the successful cooperation and may save significant
energy in this phase. On the other hand, in the multiple SUs scenario, an SU may temporarily consume
its own energy for helping other SUs sense a spectrum band. The consumed energy will increase with
U
Sensing behavior of SU1
CH1
Sensing behavior of SU2
CH2
Sensing behavior of SUU-1
Sensing behavior of SUU
CHU-1
CHU
0
2
Ts
Time
Fig. 4 Time-division energy-efficient sensing with multiple SUs
increasing number of cooperative SUs in the sensing
operation. In addition, if more cooperative SUs are
involved, the exchanging with the fusion center needs
longer exchanging time, which will further increase the
energy consumption. As a consequence, the number
of sensing SUs is a crucial design parameter to balance the consumed energy and the detected spectrum
opportunities.
Next, we will analyze the performance of the proposed TDEE scheme in both homogeneous and heterogeneous networks. In each situation, we formulate the
energy minimization problem by considering the consumed energy and the performance gain to determine
the optimal number of the participating SUs and the
number of the divided timeslots. To have a comprehensive analysis, we also calculate the throughput in both
homogeneous and heterogeneous networks.
4 Homogeneous networks: analysis and optimization
In this section, we are interested in the homogeneous
networks where the SUs have the same sensing times
and channel coefficients h from the PU’s transmitter.
The sensing time Ts of each SU is divided into U
number of consecutive timeslots. In each timeslot, an
SU senses a different channel which is assigned to one
of the SUs. Let τ be the length of each timeslot. Then,
we have Ts = Uτ .
4.1 Energy minimization
In homogeneous networks, the received signal ri (m) at
the mth sample and the ith SU is given by
ri (m) = r(m) =
w(m)
hs(m) + w(m)
H0
H1
(1)
where H0 represents the hypothesis that PU’s are
absent, and H1 represents the hypothesis that PU’s
are present. s( m) represents the PU’s transmitted signal with mean zero and variance σs2 . w(m) denotes
a Gaussian process with mean zero and variance σw2 .
For a large number of samples, we use the Central
Limit Theorem (CLT) to approximate the Chi-square
distribution of the test statistic by Gaussian distribution. Then, we can obtain the detection and false alarm
probabilities of the ith SU for the jth channel during
each timeslot τ as
λ − τ fs |h|2 σs2 + σw2
i
Pd = Pd = Q (2)
2τ fs |h|2 σs2 + σw2
Mobile Netw Appl (2012) 17:64–74
Pf =
Pif
λ − τ fs σw2
=Q 2τ fs σw2
69
(3)
∞
t2
where Q(x) = √12π x e(− 2 ) dt, fs is the sampling frequency. We consider the decision fusion in our scheme.
After the sensing slot, each SU makes a decision of
the sensed channel and then sends the decision to the
fusion center to make the final decision of the PU’s activity. Based on this mechanism, we have the detection
and false alarm probabilities of the final decision as
Pd (U) = 1 − (1 − Pd )U
U
P f (U) = 1 − 1 − P f
(4)
Ee = Te Ptx
(6)
U
Pd (U) ≥ Pd,Th
P f (U) ≤ P f,Th
(8)
U
U
P f (U) = 1− 1− P f ≤ P f,Th ⇒ 1− P f ≥ 1− P f,Th
(5)
where Te is the exchanging time caused by a SU during
one cooperative sensing process. From Eq. 6, we notice
that the energy not only relies on the power used, but
also relies on the sensing duration. In the literature,
the exchanging time is much shorter than the sensing
time, which leads to the ignorance of the energy cost
by exchanging. However, this energy increases as the
number of the cooperative SUs increases, especially
in the case where the exchanging errors happen and
retransmission of the messages is required. Hence, we
incorporate the exchanging energy and the sensing
energy into a energy minimization problem, which is
formulated to find the optimal number of the SUs. We
have the problem below
min U EsH O + Ee
s.t.
Pd (U) = 1−(1− Pd )U ≥ Pd,Th ⇒ (1− Pd )U ≤ 1− Pd,Th
(9)
As discussed in previous section, the SUs need to
consume energy for sensing. The sensing process is essentially a receiving process during which the received
power has been used by the SUs. However, in the
exchanging process, the cooperative SUs should use
transmitted power for exchanging with the fusion center. It is easy to understand that the transmitted power
is higher than the received power, which may lead
to substantial energy consumption in the exchanging
phase. To illustrate this problem directly, we let Ptx and
Prx be the transmitted power and the received power of
each SU, respectively. We define the consumed energy
as the product of the power and the using time. Let
Es and Ee denote the energy consumed by sensing and
exchanging, respectively. We have
EsH O = Ts Prx ,
where Pd,Th and P f,Th are the thresholds of the
cooperative detection and false alarm probability,
respectively.
To solve the optimal problem, we first need to find
the bound of the parameter U. For given Pd,Th and
P f,Th , we have
According to Eqs. 8 and 9, we can obtain the bounds
for U is
ln 1− P f,Th
ln 1− Pd,Th
≤U ≤
(10)
ln (1− Pd )
ln 1− P f
In Eq. 7, it is assumed that EsH O and Ee are known
and independent of U. Note that the optimization function in Eq. 7 is a decreasing function as the parameter U
increases. Therefore, we can obtain the minimal value
d,Th )
of the consumed energy when U = ln(1−P
.
ln(1−Pd )
4.2 Throughput
The sensing scheme should be energy-efficient without
comprising the system throughput. The throughput can
be achieved if an available channel is discovered and allocated to an SU for data transmission during Tr . Let Ps
represent the probability that a channel is successfully
found. This is equal to the probability that a channel is
available and no false alarm is generated by q number
of cooperative SUs. Then, we have
Ps = p 1 − P f (U)
(11)
where p is the channel availability and P f (U) is given
by Eq. 5.
Let u denote the number of available channels that
are found in the cooperative sensing. With the proposed time-division sensing strategy, up to U number
of channels can be detected in one sensing period. The
probability distribution
function of the random variable
u is given by Uu (1 − Ps )U−u Psu . Then, we can obtain
the probability, Pav , that the available channels can be
found in one sensing period as
(7)
Pav =
U U
u=1
u
(1 − Ps )U−u Psu
(12)
70
Mobile Netw Appl (2012) 17:64–74
We can derive the throughput of an SU by using this
channel as follows
U U
HO
U−u u
T
= (T − Uτ )
(1 − Ps )
Ps R
(13)
u
u=1
need to design the optimal problem by minimizing the
energy as follows
min
U;Ts1 ,··· ,TsU
s.t.
5 Heterogeneous networks: analysis and optimization
In terms of heterogeneous networks, we refer to the
network where all SUs have different sensing periods
and different channel coefficients hi of the ith SU. In
this case, the sensing period of an SU is averagely
divided into U number of consecutive timeslots. During
each slot, an SU senses a different channel. Let τi denote the length of the timeslot of the ith SU. Different
from the homogeneous network, an SU that is closer to
the PU’s transmitter is able to achieve sensing accuracy
with shorter sensing time duration. Hence, the sensing
time of each SU is also an important design parameter
in heterogeneous networks.
5.1 Energy minimization
U
EsH E Tsi + Ee
i=1
PdH E (U) ≥ Pd,Th
(19)
P Hf E (U) ≤ P f,Th
where Ee is given by Eq. 6 since our scheme only
needs to send sensing results to fusion center either in
homogeneous case or heterogeneous case, which leads
to the same exchanging energy consumption. In the
optimal problem in Eq. 19, we assumed that Ee and Prx
are known. Then, we can convert optimization function
i
in Eq. 19 as U
i=1 Ts .
It is obvious that the summarization operation
U i
i
i Ts is minimized when all Ts are minimized.
Equation 19 can be refined as
min
Tsi = Uτi
s.t.
PdH E (U) ≥ Pd,Th
U;τi
(20)
P Hf E (U) ≤ P f,Th
By using energy detector, we can obtain the detection
and false alarm probabilities of the ith SU during each
timeslot τi as
λ − τi fs |hi |2 σs2 + σw2
i
Pd = Q (14)
2τi fs |hi |2 σs2 + σw2
To solve the optimal problem, we first need to find
the bound of the U. According to Eqs. 16 and 17, we
have
PdH E (U) = 1 −
U
1 − Pdi ≥ Pd,Th
(21)
i
Pif
λ − τi fs σw2
=Q 2τi fs σw2
(15)
According to the fusion rule in the fusion center, we
have the final detection and false alarm probabilities
as
PdH E (U) = 1 −
U
1 − Pdi
(16)
i
P Hf E (U) = 1 −
U 1 − P if
(17)
i
Similar to the homogeneous case, the ith SU needs to
consume energy Eis for sensing and Ee for exchanging
with the fusion center. Then, we have
EsH E Tsi = Tsi Prx
(18)
P Hf E (U) = 1 −
U 1 − P if ≤ P f,Th
Let Pdmin and Pmax
denote the minimum detection
f
probability and the maximum false alarm probability
of the ith SU in each timeslot, respectively. We can
obtain
2 2
2
λ
−
τ
f
|
σ
+
σ
|h
i
s
min
s
w
min
=Q Pd,i
2τi fs |hmin |2 σs2 + σw2
(23)
Pmax
f,i = max{P f,i ,
i ∈ (1, . . . , U)}
where hmin = min{hi }, then, we have the following inequalities
1−
min U
Pd,i
≥
U
1 − Pdi
i
For the heterogeneous networks, the total energy
consumption is depending on the number of the SUs
U and the sensing time Tsi of each SU. Therefore, we
(22)
i
U
1 − Pmax
≤
f,i
U i
1 − P if
Mobile Netw Appl (2012) 17:64–74
71
To satisfy the inequalities in Eqs. 21 and 22, the
following formula should be obtained
min U
1 − Pd,Th ≥ 1 − Pd,i
U
1 − P f,Th ≤ 1 − Pmax
f,i
λ−τi fs (|hmin | σs +σw )
√
> 0. Then, we can approximate the
2 2
2
2
2
2
2τi fs (|hmin | σs +σw )
Q-function as an exponential function
Q(x) ≈
1 − x2
e 2
2
x>0
(27)
λ−τ f (|h | σ +σ )
where x = √ i s min 2 s 2 w2 .
2
2
2
2τi fs (|hmin | σs +σw )
Finally, we have the bound of U as follows
ln 1− Pd,Th
ln 1− P f,Th
≤U ≤ min
ln 1 − Pd,i
ln 1 − Pmax
f,i
(24)
Based on the bound of U, we can further refine the
optimal function of Eq. 20 as
min
τi
⇔ max
τi
ln 1− Pd,Th
τ
min i
ln 1 − Pd,i
min
ln 1 − Pd,i
1
×
τi
ln 1− Pd,Th
(25)
min
Since the Pd,Th is given and the function ln(1 − Pd,i
) is
min
monotonically increasing with respect to Pd,i . We have
min
ln 1 − Pd,i
1
×
max
τi
τi
ln 1− Pd,Th
⇔ max
τi
⇔ max
τi
min
Pd,i
τi
λ−τ f (|h |2 σ 2 +σ 2 )
Q √ i s min 2 s2 w2
2τi fs (|hmin | σs +σw )
τi
Thus, the optimal sensing timeslots τi can be found by
solving the following maximization problem
λ−τ f (|h |2 σ 2 +σ 2 )
Q √ i s min 2 s2 w2
2τi fs (|hmin | σs +σw )
τi∗ = arg max
τi
τi
ln 1− P f,Th
(26)
s.t. U ≤
ln 1 − Pmax
f,i
Therefore, we can obtain the optimal τi∗ as
λ2
1
∗
τi =
2 + 1 − 1
2 fs
4 |hmin |σ 2 + σ 2
s
(28)
w
5.2 Throughput
Let PsH E represent the probability that a channel is
successfully found in the heterogeneous case. This is
equal to the probability that a channel is available and
no false alarm is generated by U number of cooperative
SUs. Then, we have
PsH E = p 1 − P Hf E (U) .
(29)
Let u denote the number of available channels that
are found in the cooperative sensing. With the proposed time-division sensing strategy, up to U number
of channels can be detected in one sensing period. The
probability distribution function of the random variable
U−u H E u
Ps
. Then, we can
n is given by Uu 1 − PsH E
HE
obtain the probability, Pav
, that the available channels
can be found in one sensing period as
HE
Pav
U U−u HE u
U Ps
=
1 − PsHE
u
u=1
(30)
Consequently, we can derive the throughput of an
SU by using this channel as follows
U
HE
HE
T
= T−
τi Pav
R
u=1
=
T−
U
τi
u=1
U U u=1
u
1−
U−u HE u
PsHE
Ps
R
(31)
Due to the exponential characteristic of the Qfunction, it is difficult to solve Eq. 26 directly and
analytically. An approximation approach to solve this
optimization problem is introduced in [11]. Normally,
min
the minimum detection probability Pd,i
of the CR
system is pre-determined greater than 0.5 to avoid the
interference to the primary system. For instance, in
the standard IEEE 802.22 [16], the detection probability is required to be greater than 0.9 and false alarm
min
probability less than 0.1. Since Pd,i
> 0.5, we have
6 Numerical results
In this section, our major objectives are to demonstrate the performance of the proposed TDEE sensing
scheme in both homogeneous and heterogeneous networks. In the simulation environment, there are N = 10
number of SUs and M = 6 number of channels whose
bandwidth is 1 MHz. The length of the sensing time of
72
Mobile Netw Appl (2012) 17:64–74
6
6.1 Energy consumption
2
2
4
The number of sensed channels
6
Fig. 6 Energy consumption for different number of sensed channels in heterogeneous network
channels is shared by multiple SUs in our scheme. This
load-sharing strategy ensures a quick searching for the
spectrum opportunities and a significant reduction of
the energy consumption.
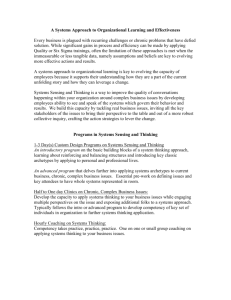
Figure 6 shows the consumed energy in terms of the
number of the sensed channels in the heterogeneous
networks. We observe that the energy consumption is
not only lower than that in the cooperative sensing
scheme but also lower than that in the non-cooperative
sensing scheme. Besides the advantage of reducing the
exchanging energy, the proposed TDEE scheme also
can choose the optimal sensing time by minimizing
sensing and exchanging energy in the heterogeneous
5
non−coopeartive scheme
cooperative scheme
TDEE scheme
non−coopeartive scheme
cooperative scheme
TDEE scheme
4.5
Consumed Energy (W*s)
Consumed Energy (Joule)
3
0
6
4
3
2
1
0
4
1
Figure 5 shows the consumed energy in the homogeneous networks. The x-axis indicates the number of
sensed channels. The results shows that the energy
consumed by our scheme is lower than that in the
traditional cooperative sensing scheme. For instance,
in the four-channel case, the consumed energy in the
traditional cooperative sensing is about 3.5 Joule while
the consumed energy in TDEE scheme is about 2.8
Joule. This is because the TDEE scheme does not
need to negotiate with other SUs for acknowledging
the successful cooperation. With reduced exchanging
time, our scheme needs much shorter time duration in
searching a spectrum opportunity. Comparatively, the
energy consumption in our scheme shows insignificant
difference from that in the non-cooperative scheme.
This is because the total sensing time spent by all SUs
in TDEE is same as the sensing period used by a single
SU in the non-cooperative scheme. However, unlike
the continuous sensing by a single SU in the noncooperative sensing, the sensing task of the multiple
5
non−coopeartive scheme
cooperative scheme
TDEE scheme
5
Consumed Energy (Joule)
a SU is fixed as 10ms in homogeneous network. The
transmission power and the receiving power of an SU
are set as 1.5W and 1W, respectively. The proposed
TDEE scheme is compared with a non-cooperative
sensing scheme and a cooperative sensing scheme. In
the non-cooperative scheme, each SU has to monitor a
set of channels in the network sequentially by itself in
order to find an available channel to access. In the traditional cooperative sensing scheme, the SUs cooperate
to sense the licensed channels.
4
3.5
3
2.5
2
2
4
The number of sensed channels
6
Fig. 5 Energy consumption for different number of sensed channels in homogeneous network
1.5
0.6
0.7
0.8
0.9
1
1.1
T (s)
1.2
1.3
1.4
1.5
s
Fig. 7 Energy consumption in terms of the sensing time in
homogeneous network
Mobile Netw Appl (2012) 17:64–74
73
5
120
non−coopeartive scheme
cooperative scheme
TDEE scheme
4.5
TDEE scheme
cooperative scheme
non−coopeartive scheme
100
Throughput (M/s)
Consumed Energy (W*s)
4
3.5
3
2.5
80
60
40
2
20
1.5
1
0.6
0
0.7
0.8
0.9
1
1.1
Ts (s)
1.2
1.3
1.4
1.5
Fig. 8 Energy consumption in terms of the sensing time in
heterogeneous network
network. In this case, sensing time is significantly reduced compared to the non-cooperative scheme where
the sensing time is predetermined. As a consequence,
our proposed TDEE scheme is able to reduce the energy consumption compared to the other two schemes.
Figures 7 and 8 show the consumed energy in terms
of the total sensing time Ts in the homogeneous and
heterogeneous networks, respectively. The energy consumed by any schemes increases as the sensing time
increases in both homogeneous and heterogeneous networks. However, the proposed TDEE scheme is able to
consume lower energy than that in the traditional cooperative sensing scheme and that in the non-cooperative
scheme, especially in the heterogeneous networks. Because our scheme introduces the optimal sensing time
which is able to spend the least sensing time and hence
consume lower energy.
0
20
40
60
Time (s)
80
100
120
Fig. 9 Throughput compassion in homogeneous network
higher sensing efficiency with lower sensing overhead.
Figure 10 shows the throughput in the heterogeneous
networks. Again, our scheme substantially outperforms
the non-cooperative sensing scheme and the cooperative sensing scheme. Besides the reason mentioned in
the homogeneous case, our scheme introduces the optimal sensing time which is able to spend the least sensing
time and hence achieve higher throughput. From Figs. 9
and 10, we also observe that the throughput in the heterogeneous case is higher than that in the homogeneous
case. This is because our scheme can reduce both of
the exchanging and sensing time in heterogeneous case.
Correspondingly, only exchanging time is reduced in
the homogeneous case. The shorter sensing time used
by the SUs leads to more transmission opportunities
which can increase throughput.
180
TDEE scheme
cooperative scheme
non−coopeartive scheme
160
6.2 Throughput
Throughput (M/s)
140
Figure 9 shows the throughput among the proposed
TDEE scheme, the non-cooperative sensing scheme
and the cooperative sensing scheme in the homogeneous networks. The results indicate that the proposed
TDEE scheme is able to achieve much higher throughput than the other two schemes. This can be explained
as follows. During the same sensing period, the TDEE
scheme is able to search and find more spectrum
opportunities than the non-cooperative scheme. The
traditional cooperative scheme allocates all of SUs to
cooperate for sensing and causes a large number of exchanging periods, which leads to lower throughput. As
a consequence, our proposed scheme is able to achieve
120
100
80
60
40
20
0
0
20
40
60
Time (s)
80
100
Fig. 10 Throughput compassion in heterogeneous network
120
74
7 Conclusion
In this paper we discuss the design of cognitive radio
from the energy-efficiency perspective. A new energyefficient spectrum sensing scheme, TDEE, is proposed
for the sake of saving the energy consumption during the secondary users collaboration phase. Results
indicate that the proposed scheme TDEE is able to
well balance the trade-off between spectrum efficiency
and energy consumption. In comparison to the existing
schemes, TDEE is able to significantly decrease energy
consumption and also increase network throughput
with guaranteed sensing accuracy. The energy-efficient
spectrum sensing is very important for the design of
future green communication and networking paradigm.
Acknowledgements The work in this paper is partially supported by programs of NSFC under Grant nos.60903170,
U0835003, U1035001; the Specialized Research Fund for
the Doctoral Program of Higher Education (SRFDP, no.
20090172120010); the Fundamental Research Funds for the
Central Universities, SCUT (no. 2009ZM0250); the Foundation for Distinguished Young Talents in Higher Education of
Guangdong, China; the projects 208739/E20 and 205048/V11
funded by the Research Council of Norway.
References
1. FCC (2002) Spectrum Policy Task Force, Rep. ET Docket no.
02-135
2. Haykin S (2005) Cognitive radio: brain-empowered wireless
communications. IEEE J Sel Areas Commun 23(2):201–220
3. Jovičić A, Viswanath P (2009) Cognitive radio: an
information-theoretic perspective. IEEE Trans Inf Theory
55(9):3945–3958
4. Ghasemi A, Sousa ES (2008) Spectrum sensing in cognitive
radio networks: requirements, challenges and design tradeoffs. IEEE Commun Mag 46(4):32–39
Mobile Netw Appl (2012) 17:64–74
5. Lee W-Y, Akyildiz IF (2008) Optimal spectrum sensing
framework for cognitive radio networks. IEEE Trans Wirel
Commun 7(10):3845–3857
6. Zhao Q, Tong L, Swami A, Chen Y (2007) Decentralized
cognitive MAC for opportunistic spectrum access in ad hoc
network: a POMDP framework. IEEE J Sel Areas Commun
25(3):589–600
7. Jia J, Zhang Q, Shen X (2008) HC-MAC: a hardwareconstrained cognitive MAC for efficient spectrum management. IEEE J Sel Areas Commun 26(1):106–117
8. Shen J, Liu S, Zeng L, Xie G, Gao J, Liu Y (2009) Optimisation of cooperative spectrum sensing in cognitive radio
network. IET Communications 3(7):1170–1178
9. Liu Y, Yu R, Zhang Y, Xie S (2010) A group-based cooperative medium access control protocol for cognitive radio
networks. In: proc. IWQOS, pp 1–9
10. Xie S, Liu Y, Zhang Y, Yu R (2010) A parallel cooperative
spectrum sensing in cognitive radio networks. IEEE Trans
Veh Technol 59(8):4079–4092
11. Pham HN, Zhang Y, Engelstad PE, Skeie T, Eliassen F (2010)
Energy minimization approach for optimal cooperative spectrum sensing in sensor-aided cognitive radio networks. In:
proc. IEEE WICON, pp 1–9
12. Lee C-h, Wolf W (2008) Energy efficient techniques for cooperative spectrum sensing in cognitive radios. In: proc. IEEE
CCNC, pp 968–972
13. Feeney LM, Nilsson M (2001) Investigating the energy consumption of a wireless network interface in an ad hoc networking environment. In: proc. IEEE INFOCOM
14. Quan Z, Cui S, Sayed AH (2009) Optimal multiband joint
detection for spectrum sensing in cognitive radio networks.
IEEE Trans Signal Process 57(3):1128–1140
15. Su H, Zhang X (2008) Cross-layer based opportunistic MAC
protocols for QoS provisionings over cognitive radio wireless
networks. IEEE J Sel Areas Commun 26(1):118–129
16. Cordeiro C, Challapali K, Birru D, Sai Shankar N (2005)
IEEE 802.22: the first worldwide wireless standard based on
cognitive radios. In: proc. IEEE DYSPAN, pp 328–337
17. Xiang J, Zhang Y, Skeie T (2010) Medium access control
protocols in cognitive radio networks. Wiley Wirel Commun
Mob Comput (WCMC) 10(1):31–49
18. Yu R, Zhang Y, Huang M, Xie S (2010) Cross-layer optimized call admission control in cognitive radio networks.
ACM/Springer Mob Netw Appl (MONET) 15(5):610–626