Evaluation of middleware for distributed objects on handheld devices Tom Kristensen
advertisement

Evaluation of middleware for distributed objects on
handheld devices
Tom Kristensen12 , Lars Preben S. Arnesen1 , Eirik Valen1 , and Thomas Plagemann1
1
Department of Informatics, University of Oslo, Norway
{tomkri, larsar, erk, plageman}@ifi.uio.no
http://www.ifi.uio.no/dmms/
2 Thales Communications AS, Oslo, Norway
http://www.thales.no/
Abstract. Use of object-oriented middleware will ease the development of distributed applications in pervasive and mobile computing environments. However, the handheld devices have limited resources and the wireless networks have
limited capacity. In this paper, we evaluate if PDAs and laptops are powerful
enough to run commodity CORBA implementations. We have performed and
analysed thorough measurements of different configurations of hardware, network and software. We found that vanilla PDAs run CORBA implementations
quite efficiently. Therefore, use of object-oriented middleware is feasible in wireless networking, using PDAs and handheld devices today. However, tailoring the
CORBA implementations for limited resources yields better performance. This
indicates the need for specialised implementations for handheld devices, or configurable and tailorable ORBs with regard to the environments the implementations are deployed.
1
Introduction and motivation
Mobile communication and computing devices, like laptops and PDAs with WLAN
interface cards or cell phones with PDA functionality have become very popular over
the last years and there is no sign that this trend will change in the next future. Obviously, these devices are and will be used to run distributed applications. However, the
high level of heterogeneity in terms of devices ranging from high-performance PCs to
resource poor cell-phones, and in terms of networks, ranging from wired gigabit networks to wireless low bitrate links is a challenge for application developers. To mask
heterogeneity of platforms, location, development language, etc. is the classical task
of middleware. Object-oriented middleware, like CORBA, is successfully used to ease
application development in heterogeneous environments. Offering the same abstractions and similar interfaces for application development on all these platforms will ease
and speed up application development. We regard CORBA, and CORBA-like technologies promising candidates for building next-generation object-oriented middleware for
handheld devices, mobile computing, wireless and ad hoc networks, as well as traditional environments where CORBA is widely used today.
Therefore, it is natural to study the appropriateness of object-oriented middleware
also for the development of distributed applications running on PDAs and wireless networks. Some myths exists with regards to the use of object-oriented middleware in such
environments: (i) middleware is heavy and adds a lot of overhead in both processing
time and resource consumption, and (ii) that handheld devices are too weak for running
middleware.
The motivation for the work described in this paper is to understand whether these
myths are true or not and to analyse in detail the performance of CORBA implementations on vanilla PDAs using commodity wireless network technology.
In order to draw a roadmap for future development of middleware for handheld
devices and, in general, ubiquitous computing the state of existing middleware implementations will serve as a baseline. To the best of our knowledge, no newer benchmark measurements and analysis of middleware on handheld devices are performed.
Therefore, we have to explore the state-of-the-art concerning performance of available
solutions and implementations of today’s middleware.
Prominent examples of next-generation middleware for handheld devices is UICCorba[1][2] and BASE[3]. However, these approaches target tiny, resource-scarce devices as typical PalmOS-based PDAs. Also, MICO is available on the Palm platform
[4]. For wireless environments Object Management Group (OMG) have worked out the
Wireless CORBA specification[5], which is implemented by the MICO wireless extensions (MIWCO)[6]. CORBA and object-oriented middleware in general is used for
mobile systems, ad hoc networks and embedded systems in numerous projects and prototypes. However, our mission is to conduct a benchmarking and analysis of standard
CORBA implementations on newer, quite powerful PDAs and laptops.
The rest of the paper is organized as follows. Section 2 describes the test set-up and
an overview of the benchmark tool used. Section 3 contains the analysis of the benchmark tests divided in subsections with emphasis on different CORBA implementations,
hardware and network technologies, as well as system resource usage. The paper and
results is summarized in Section 4
2
Test configuration
Our goal is to investigate whether the CORBA implementations are suited for handheld
devices or not. We have to make measurements of the resource and time consumption of
the CORBA applications, in order to find out how much overhead CORBA adds. Both
simple method invocations with no transfer of parameter data, and methods transfering
a great amount of parameter data have to be measured. A CORBA implementation
also have to support a huge number of objects, without increasing the response time to
unacceptable values.
We investigate the behaviour of the commercial Orbix/E[7] and the open-source
MICO[8] CORBA implementations. Orbix/E is targeted for embedded, resource scarce
devices, implementing only a subset of the CORBA specification. MICO is a fullfledged CORBA implementation, and does not emphasize any particular type of platform. MICO is a prominent representative of generic CORBA implementations. Additionally, it is possible to use on the platforms used in this paper. Orbix/E is an example
of an ORB tailored for embedded devices, and therefore interesting to use in comparison with MICO. Also, Orbix/E’s source code is available and runs on the platforms of
interest in this paper.
Bluetooth
Bluetooth
IPAQ1
IPAQ2
PC2
Logger
802.11b
(managed)
PC1
Internet
Router
Switch
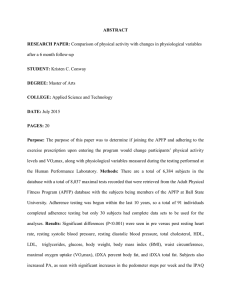
Fig. 1. Setup for the test
The CORBA implementations are tested on different platforms using various network technologies[9]. Comparing data from the measurements enable us to analyse how
changes in test parameters, such as type of hardware and network technology influence
on the performance of the implementations. We will also analyse how the performance
varies for the different CORBA implementations given the same test parameters.
The measurements are conducted with different combinations of client and server
platforms, running on devices with the same or different architecture. In addition measurements will be done with client and server on the same machine. This is the list of
test configurations:
–
–
–
–
Client on iPAQ, server on PC
Client on iPAQ, server on another iPAQ
Client on PC, server on iPAQ
Client and server on same iPAQ or PC
Figure 1 illustrates the test setup. The HP iPAQ H3870 has a 206MHz Intel SA-1110
StrongARM processor with 64MB RAM and 32 MB ROM. The iPAQs are communicating over Bluetooth and Wi-Fi (IEEE 802.11b) wireless LAN links. PC1 is a 350MHz
Intel Pentium II with 512MB RAM. PC1 is is equipped with a Bluetooth USB adapter
and connected to the Wi-Fi router over Ethernet, enabling communication with the
iPAQs using Bluetooth and Wi-Fi respectively. PC2 is a 500MHz Intel Pentium III with
384MB RAM. PC2 is solely communicating with the other computers using Wi-Fi. Additionally, the PC named Logger is available via a 100 Mbit Ethernet switch. Logger is
used for saving the measurement data to disk due to restricted disk space on the iPAQs.
Open CORBA Benchmarking (OCB)[10] is used to perform and generate suitable
data for the analysis. OCB provides an overview of the most significant parameters regarding ORB performance. OCB is a flexible tool already supporting several CORBA
implementations, including Orbix/E and MICO used in this paper. OCB also allows
users to publish and browse other’s benchmarking results on the web, enabling comparison with data from other test configurations.
OCB is designed according to OMG’s guidelines for CORBA benchmarking[11],
which advocates the need for benchmarks to be open, well understood and easy to
measure. We focus on these OCB test categories:
– Invocation - measures response times for method invocations without parameters.
The response times for the request-reply is measured on the client side. This test is
labeled invocation.
– Marshalling - Throughput test performed by sending invocations with parameters
of increasing size, in order to investigate the behaviour of the ORB. These tests are
refered to as sequence in and sequence out.
– Dispatcher - Scalability test measuring response times for increasing number of
objects on the server side. The test is labeled instances.
– System performance - several small independent test measuring CPU, memory,
thread and socket performance (without using CORBA functionality).
3
Analysis
This section describes the analysis of the data from the OCB measurements with the
test configurations presented in Section 2. For the method incovation test all raw data
from the measurements are available. Data from the marshalling and dispatcher measurements are limited to five set of values, the set consists of a minimum, a maximum
and one average value. Therefore, the analysis if based on an average of the average
value from these five sets.
During the marshalling and dispatcher tests data where gathered respectively for
different data size and for number of objects. The analysis is based on values for the
maximum and minimum data size and number of objects. For the marshalling tests that
minimum data size is 0 KB and maximum 50 KB, for dispatcher tests the minimum
number of objects is 1 and the maximum 20 000.
The measurement analysis is partitioned into four parts. First, the differences between the two CORBA implementations are described. Second, the influence of the
hardware platforms are analysed, the results of the benchmark on the iPAQ and the
workstation are compared to see the influence of different hardware. In the third part,
two different network technologies are used, that is Wi-Fi and Bluetooth. Measurements
from using these wireless networks are compared with measurements running locally
on one machine, that is without using network. Finally, the system resource usage is
analysed.
The most important measurement results are summarized in tables. We are fully
aware that such a presentation makes the paper not easier to read, but it guarantees that
all relevant numbers can be presented in this paper. For more details we kindly refer the
reader to [9].
3.1
CORBA implementations
In order to explore the differences between the CORBA implementations, without the
influence of factors as network conditions or hardware configurations, the different
OCB measurements are performed locally on an iPAQ and on the two workstations.
In
Response time
Machine ORB
0 KB 50 KB
Increase
PC1
Orbix/E 243 µs 1 262 µs 1 019 µs 419%
PC1
MICO 789 µs 2 785 µs 1 996 µs 253%
PC2
Orbix/E 107 µs 794 µs 687 µs 642%
PC2
MICO 391 µs 1 986 µs 1 595 µs 408%
PC1
Orbix/E 270 µs 1 604 µs 1 334 µs 494%
PC1
MICO 795 µs 4 312 µs 3 517 µs 442%
PC2
Orbix/E 119 µs 1 090 µs 971 µs 816%
PC2
MICO 402 µs 3 007 µs 2 605 µs 648%
Table 2. Measurements from sequence in and out
for Orbix/E and MICO
Out
Orbix/E MICO
Response time
Machine Average Median
iPAQ 6 237 µs 4 361 µs
PC1
732 µs 659 µs
PC2
355 µs 325 µs
iPAQ 1 627 µs 1 206 µs
PC1
237 µs 211 µs
PC2
107 µs
90 µs
Table 1. Invocation measurement for MICO and Orbix/E
Invocation Table 1 presents the response times for MICO and Orbix/E running locally
on the different machines, as shown MICO’s response times are clearly higher than
Orbix/E’s. In all the cases MICO spends over three times as long time performing the
invocation compared to Orbix/E.
From Table 1 we see the main distribution for Orbix/E is between 209-213 µs and
between 648-663 µs for MICO.
Marshalling In order to study how the response times reacts to an increasing amount
of parameter and return data, we have calculated the relative increase in response times
for invocations with and without associated data. This is based on local measurements
to isolate the benchmark from delays in the network. Table 2 presents the measurements for parameter size of 0 and 50 KB for both sequence in and sequence out. The
marshalling test follows the trend from the invocation test; Orbix/E is clearly performing better than MICO. On both test machines Orbix/E used about one-third of the time
MICO used for invocations without data transfer. When transfering 50 KB, how the
marshalling/demarshalling routines are implemented have huge impact. As the measurements show, Orbix/E uses 40-45% of the time MICO uses to complete the invocation.
Also, for the sequence out test does Orbix/E behave better than MICO when regarding response times. The response times for both CORBA implementations are slightly
higher than for sequence in. The differences between response times for Orbix/E and
MICO for sequence out are however smaller. Table 2 also shows that the increase in
response times is bigger for sequence out compared to sequence in for both implementations. With empty method invocation (0 KB) the response times for sequence in
comprise 90% of the response times for sequence out using Orbix/E and 97-99% using
MICO. When transfering 50 KB in the invocations the values for sequence in are about
75% and 66% of the sequence out values for Orbix/E and MICO respectively.
MICO is distinctly slower than Orbix/E both when transfering parameter and return
data. In addition, MICO scales poorly compared to Orbix/E for both sequence tests, especially sequence out. This indicates that MICO’s IDL compiler generates less effective
code compared to Orbix/E’s compiler.
Dispatcher In order to explore differences in response times for varying number of
of objects on the server side, we performe local measurements on a workstation and
Response time
Machine ORB
1 obj 10 000 obj Increase
Orbix/E 246 µs
252 µs
6 µs 2%
PC1
MICO
739 µs
817 µs
78 µs 11%
Orbix/E 1 685 µs 1 961 µs 276 µs 16%
iPAQ
MICO 6 343 µs 9 507 µs 3 164 µs 50%
Table 3. Measurements from instances
Machine Average Median
PC1
236 µs 212 µs
PC2
107 µs
90 µs
iPAQ
1 627 µs 1 206 µs
Table 4. Response times
from invocation for Orbix/E
an iPAQ for both CORBA implementations. Orbix/E on iPAQ could not handle more
than 10 000 objects, therefore we used this as the maximum number of objects in this
particular test.
Table 3 presents the results of the measurements, with calculations of absolute and
relative increase of response times as the number of objects increase from 1 to 10 000
objects. As we see MICO has higher response times than Orbix/E for both 1 and 10 000
objects and on the iPAQ as well as the workstation. Also, the increase in response
times is higher for MICO, meaning that Orbix/E scales better for increasing number
of objects compared to MICO. This indicates that Orbix/E’s dispatcher functionality is
implemented more effective than in MICO.
Summary All benchmarks shows MICO has longer response times than Orbix/E. The
invocation tests for Orbix/E results in response times that is one-third of corresponding
values for MICO. Orbix/E also scales better both for increasing parameter and return
data size and for increasing number of objects on the server side. All sequence tests, for
both ORBs shows that response times involving return of parameter data is higher than
sending of parameter data. We have not been able to identify whether this is due to the
benchmark tools or the CORBA architecture and implementation itself.
3.2
Out
In
Orbix/E MICO
Response time
Machines Average Median
Machine
0 KB 50 KB
Increase
iPAQ - PC1 4 979 µs 4 242 µs
PC1 - iPAQ 243 µs 1 262 µs 1 019 µs 419%
PC1 - iPAQ 5 870 µs 4 981 µs
iPAQ - PC1 107 µs 794 µs 687 µs 642%
iPAQ - iPAQ2 8 914 µs 6 845 µs
iPAQ - iPAQ2 391 µs 1 986 µs 1 595 µs 408%
iPAQ - PC1 3 734 µs 3 180 µs
PC1 - iPAQ 270 µs 1 604 µs 1 334 µs 494%
PC1 - iPAQ 3 676 µs 3 132 µs
iPAQ - PC1 795 µs 4 312 µs 3 517 µs 442%
iPAQ - iPAQ2 5 698 µs 4 265 µs
iPAQ - iPAQ2 119 µs 1 090 µs 971 µs 816%
Table 5. Invocation measureTable 6. sequence in and sequence out for MICO
ment for MICO and Orbix/E
Hardware
In this section, we present measurements performed using different configurations of
hardware, the results are compared with measurements done locally. We have used WiFi as network technology to connect the different machines together, as this is the technology we had available with the lowest latency and highest throughput.
Invocation The response time distribution from the invocation test are presented in
Table 4. As can be seen, there is a distinct difference between PC1 and PC2. The values
for PC2 are about the half of the response times for PC1. The iPAQ is, as expected much
slower than the two other machines. PC1 spend 6-8% of the response times measured
for the iPAQ. PC2 has over 7 000 occurences of 90 µs. The distribution of results for
PC1 is not that tight, although it is more focused than iPAQ’s. This indicates that how
tight or focused the distribution is depends on how powerful the machine is.
The measurements above are done locally on each machine. Additionally, measurements for invocations between machines are performed in order to explore how different
machine configurations influence the results. Refer to Figure 1 for an overview of the
configurations.
The combination with the worst response times were iPAQ-iPAQ2, as shown in
Table 5. This configuration was the combination with least power in total, therefore
the result was as expected. Using Orbix/E, the combinations iPAQ-PC1 and PC1-iPAQ
resulted in about the same response times and distribution of measurements from the
test. For MICO the combination iPAQ-PC1 resulted in response times about 20% lower
than the values for the combination PC1-iPAQ. This indicates the server needs more
processing power than the client, therefore the best combination is to use the most
powerful machine with most resources on the server side.
Marshalling As shown in Section 3.1, returning data (sequence out) consumes more
time and scales worse than sending of parameter data (sequence in). This tendency is
the same for all machines, and for both 0 KB and 50 KB data size.
The smallest increase in response times comes from the combinations where the
PC performs sending/returning of data. That is, the best combination for the sequence
in test is using the PC as a client and for the sequence out test using the PC as server.
Table 6 presents measurements of sequence in and sequence out with 0 and 50 KB of
data size. As we see, operations that involve sending of data is more time consuming
than operations for receiving the data. For TCP, receiving data is the heaviest operation,
this indicates that the reason for the ORB behaviour can be found above the TCP implementation, e.g. in the middleware itself. The measurements summarized in Table 6
is performed using Wi-Fi, the relative differences between the sequence tests is smaller
than the tests performed locally on the different machines. An explanation for this is that
the Wi-Fi network introduces delays in the network that hides some of the differences
in processing time.
Dispatcher For the instances test we present measurements for both Wi-Fi and Bluetooth using different combinations of hardware. The reason for presenting Bluetooth as
well is that we experienced a different behaviour for Bluetooth compared to Wi-Fi.
Table 7 summarize the measurements, with 1 - 20 000 objects for MICO and 1 10 000 objects for Orbix/E. When running locally on PC1 and iPAQ, response times are
clearly lower for PC1. Additionally, we see that both the absolute and relative increase
in response times from 1 to 20 000 (10 000 for Orbix/E) is not as steep as the increase
on the iPAQ.
The hardware configuration that scales best is PC1 - iPAQ. Our results indicates
better results regarding scalability when using the most powerful machine on the client
side. Our pre-assumption was that a more powerful machine on the server side would
Wi-Fi Local
BT
Response time MICO
Response time Orbix/E
Machines
1 obj 20 000 o.
Increase
1 obj 10 000 o. Increase
PC1
739 µs
839 µs
100 µs 14%
246 µs
252 µs
6 µs 2%
iPAQ
6 343 µs 10 831 µs 4 488 µs 71% 1 685 µs 1 961 µs 276 µs 16%
PC1 - iPAQ 5 834 µs 6 862 µs 1 028 µs 17% 3 675 µs 3 778 µs 103 µs 3%
iPAQ - PC1 5 036 µs 8 473 µs 3 437 µs 68% 3 756 µs 4 147 µs 391 µs 10%
iPAQ - iPAQ2 8 919 µs 13 713 µs 4 794 µs 54% 5 781 µs 6 279 µs 498 µs 9%
PC1 - iPAQ 59 764 µs 60 251 µs
487 µs 1% 55 500 µs 55 529 µs
29 µs <1%
iPAQ - PC1 63 588 µs 77 626 µs 14 068 µs 22% 58 994 µs 60 904 µs 1 910 µs 3%
iPAQ - iPAQ2 79 150 µs 90 489 µs 11 339 µs 14% 75 896 µs 77 238 µs 1 342 µs 2%
Table 7. Measurements from instances for MICO and Orbix/E
Network technology Theoretical iPAQ-PC1 iPAQ-iPAQ2
Wi-Fi
11 000 Kbps 3 600 Kbps 2 500 Kbps
Bluetooth
110-340 Kbps
80 Kbps
75 Kbps
Bluetooth comp
2 800 Kbps 2 200 Kbps
Table 8. Theoretical bandwidth and measured throughput
have a positive effect on the dispatching performance. However, we have found weaknesses in OCB’s routines that may be the cause of the described findings.
When running the benchmark over Wi-Fi, the combination iPAQ - PC1 scales better
than the combination with two iPAQs. Using Bluetooth results in the opposite, the combination with two iPAQs scales better. The significance of the scalability is reflected in
the relative increase of response time. Even though iPAQ - PC1 scales better compared
to iPAQ - iPAQ2 over Wi-Fi, the increase in response times for iPAQ - PC1 represents
a greater amount of the total response time.
3.3
Network
We have already seen in the previous section that the network influences the performance of the ORBs. In this section, we analyse in detail how MICO and Orbix/E behave
when used over different network technologies and how different hardware configurations react on changes in network technology.
Troughput and delay Before performing the measurements and analysis of the ORBs
it is useful to know what the performance on the network level are, both locally and
between machines. We are using the ttcp tool to measure troughput and delay. ttcp is
configured to generate random generated data for 5 minutes, this test is repeated several
times for each configuration.
In Table 8, the measured throughput for the combinations iPAQ - PC1 and iPAQ iPAQ2 is listed for the interesting network types. As we can see the theoretical bandwidth is much higher than the measured values. This is not surprising as the theoretical
bandwidth does not include checksums, headers or other control data. The measured
performance is for pure payload on the application level.
Machine
Throughput
RTT
iPAQ
127 000 Kbps 0.20 ms
PC1
540 000 Kbps 0.03 ms
PC2
1 320 000 Kbps 0.04 ms
Table 9. Measured local
throughput and RTT
Network tech. PC1-iPAQ iPAQ-PC1 iPAQ-iPAQ
Wi-Fi
2.7 ms
2.7 ms
3.8 ms
Bluetooth
64 ms
73 ms
88 ms
Bluetooth comp
49 ms
57 ms
88 ms
Table 10. Measured RTT with different network
technologies between machines
In order to relate response times from OCB to response times below the ORB layer,
simple measurements with ping is done. The results can be found in Table 9 and 10.
Invocation With different network types the behaviour of the two ORBs are measured.
As we can see from Table 11 numbers for Bluetooth are a magnitude higher than the
numbers for local and Wi-Fi measurements. The transport protocol in use, namely TCP,
is probably the cause of this, because it uses three segments to establish and four segments to release a connection. Therefore, the latency in the network have huge impact
on the response times in this scenario.
For all measurements the difference between MICO’s and Orbix/E’s performance
are clear. Notice that we experience response times for Orbix/E over Wi-Fi that is lower
than response times measured locally with MICO. Differences in average response
times between Orbix/E and MICO vary distinctly between local measurements and
measurements over network, differences when using network is a magnitude higher.
However, this difference constitutes a smaller part of the total response the slower
the networks used are. Differences between the ORBs are getting smaller when using
slower networks.
Response time
Network
1 obj 10 000 obj
Increase
Local
6 343 µs 10 831 µs 4 488 µs 71 %
Wi-Fi
8 919 µs 13 713 µs 4 794 µs 54 %
Bluetooth 79 134 µs 90 750 µs 11 616 µs 15 %
Local
1 685 µs 1 961 µs
276 µs 16 %
Wi-Fi
5 781 µs 6 455 µs
674 µs 12 %
Bluetooth 75 972 µs 78 419 µs 2 447 µs 3 %
Table 12. Measurements from instances between
iPAQs
Orbix/E MICO
Orbix/E MICO
Response time
Network Average Median
Local
6 237 µs 4 361 µs
Wi-Fi
8 914 µs 6 845 µs
Bluetooth 80 550 µs 79 476 µs
Local
1 627 µs 1 206 µs
Wi-Fi
5 698 µs 4 265 µs
Bluetooth 76 050 µs 74 970 µs
Table 11. Response times for
MICO and Orbix/E
Marshalling To explore how different network technologies influence on throughput,
we have measured the ORBs locally on an iPAQ and between two iPAQs using Wi-Fi
and Bluetooth. Table 13 summarizes the results for measurements with 0 and 50 KB
data size.
The empty method invocations (0 KB data size) over Wi-Fi have quite low response
times compared to local measurements. Switching to Bluetooth yields response times
about ten times higher than for Wi-Fi. Again the setup and teardown of TCP connections
Orbix/E
MICO
Test Network
0 KB
50KB
Increase
Local
6 650 µs 21 522 µs 14 872 µs 224%
In Wi-Fi
9 494 µs 185 571 µs 176 077 µs 1 855%
Bluetooth 81 011 µs 354 318 µs 273 307 µs 338%
Local
6 827 µs 34 070 µs 27 243 µs 399%
Out Wi-Fi
9 454 µs 198 528 µs 189 074 µs 2 000%
Bluetooth 82 389 µs 368 277 µs 285 888 µs 347%
Local
1 648 µs 6 917 µs 5 269 µs 320%
In Wi-Fi
5 688 µs 170 995 µs 165 307 µs 2 906%
Bluetooth 76 018 µs 358 839 µs 282 821 µs 372%
Local
1 872 µs 9 551 µs 7 679 µs 410%
Out Wi-Fi
5 870 µs 171 819 µs 165 949 µs 2 827%
Bluetooth 76 218 µs 369 670 µs 293 452 µs 385%
Table 13. Measurements from sequence in and out for Orbix/E and MICO on iPAQ
have a huge influence in this. For 50 KB data size the relative differences are not that
big. Response times for Wi-Fi now constitute about 70% of the response times for
Bluetooth using MICO. For Orbix/E the difference is somewhat bigger. Response times
for local measurements and 50 KB data are far below the measurements when using
network, the numbers are just 5 - 10% of the network response times.
The difference between the sequence in and out tests are clear for local measurements with 50 KB data. Using Wi-Fi the difference is less, for Orbix/E the response
times for the two is even almost identical. For measurements over Bluetooth the relative difference between sequence in and out is very small for both ORBs. Thus, delay
in the wireless networks masks out differences between the two sequence tests.
Dispatcher How scalability is affected by the different network technologies are summarized in Table 12. Measurements are performed for Orbix/E and MICO using Wi-Fi
and Bluetooth, with local measurements added in order to compare the results.
The increase in response times is larger for Bluetooth than for Wi-Fi, as seen from
Table 12. The increase for local measurements are lower than when using network, this
is valid for both ORBs. This indicates the ORBs scales poorer, when slower networks
are used. However, the average response time increase considerably with slower networks. Therefore, analysing the relative numbers for scalability in Table 12 shows that
the increase in response times have less influence for slower networks. The difference
in scalability blurs out for the CORBA implementations when using slow networks.
3.4
System resource usage
In this Section, we analyse the utilization of system resources on the test machines
during the measurements. The CPU load for local measurements, where both client
and server run on the same machine, is very high. In this case, the client and server
applications consumed all available processing time, this influence the performance
measured in this configuration. During measurements over network the CPU load was
clearly lower, especially with Bluetooth where much time is spent in I/O wait state
caused by latency in the network.
The network resource usage is quite similar for both ORBs. As both use standard
IIOP for data encapsulation and exchange, and OCB sends equal amount of data for
over both ORBS.
During dispatcher measurements MICO generated far more page faults than Orbix/E. We presume MICO’s poor performance compared to Orbix/E have a connection
with this. Another related effect showed up during initial testing of the two ORBs.
MICO could handle up to 37 000 objects, while Orbix/E could barely handle 20 000
objects. However, Orbix/E is targeted for embedded platforms, therefore resource consumption is kept to a minimum. MICO uses a higher amount of memory, on a machine
with limited memory on board this will lead to a high amount of page faults and degraded performance.
4
Conclusions
In this paper, we have presented our experimental studies on the performance of CORBA
implementations on commodity PDAs and laptops. The measurements are performed
using Open Corba Benchmarking (OCB). The different tests are (i) invocation, measuring response times for empty method calls, (ii) sequence in and out, testing performance
for invocations with different parameter data size, (iii) instances, indicating scalability
by measuring response times for increasing number of objects, and finally (iv) system
performance, consisting of several tests benchmarking the system performance without CORBA functionality. During the analysis of the measurement data, three different
viewpoints are used. First, we dealt with differences between the two CORBA implementations Orbix/E and MICO. Second, the influence of various hardware were analysed and finally the impact of using two different wireless network technologies were
looked into. In addition, the system resource consumption were analysed.
It turned out Orbix/E performed significantly better than MICO, both in terms of
lower response times for method invocations, higher troughput and better scaling behaviour regarding number of objects. MICO generated a high number of page faults
during the dispatcher test that may have influenced the performance. Tuning MICO’s
memory consumption would probably improve the performance.
Measurements using the different hardware scenarios showed that configurations
with a powerful machine in one connection end-point performed much better compared
to configurations with iPAQs in both ends. Another result was that CORBA implementations used more time sending data compared to the time it takes to receive the same
amount of data. Also, transfering return data is more demanding than transfering parameter data. Therefore, for applications returning a large amount of parameter data
should if possible place the most powerful machine as server.
Network analysis indicates that both Wi-Fi and Bluetooth restricts the performance
of CORBA applications due to slower data transmission and higher response times
for invocations. Also, the relative differences between the CORBA implementations
becomes smaller as a result of slower networks.
The work described in this paper proves the feasability of using CORBA as middleware on handheld devices. The performance are promising and the added overhead
from CORBA is not a major concern. Newer handheld devices are powerful computing
devices, enabling development of distributed systems where for instance cellular phones
and PDAs perform an increasing amount of the data processing. PDAs are not anymore
just devices used to shuffle information back and forth between server machines and
the handheld devices. However, several factors have a strong impact on how relatively
resource poor devices behave in wireless environments. Using these factors as input for
optimizations will probably produce good results. Orbix/E is developed with resource
poor devices in mind, as shown, resulting in better performance in such environments.
The promising results makes it interesting to explore the use of CORBA and develop
next-generation CORBA-like middleware in scenarios involving handheld or embedded
devices in domains such as mobile communications, sensor networks and ad hoc networking.
Acknowledgements
We would like to acknowledge the DITS and GT Programmes of the Norwegian Research Council (NFR) for financial support and UNINETT for providing PDAs and the
wireless equipment used in this work.
References
1. Román, M., Kon, F., Campbell, R.H.: Reflective middleware: From your desk to your hand.
Distributed Systems online 2 (2001)
2. Román, M., Singhai, A., Carvalho, D., Hess, C., Campbell, R.: Integrating pdas into distributed systems: 2k and palmorb. In Gellersen, H.W., ed.: Proceedings of the First International Symposium on Handheld and Ubiquitous Computing (HUC 99). Number LNCS 1707
in Lecture Notes in Computer Science, Karlsruhe, Germany, Springer Verlag (1999)
3. Becker, C., Schiele, G., Gubbels, H.: Base - a micro-kernel-based middleware for pervasive
computing. In: Proceedings of IEEE International Conference on Pervasive Computing and
Communications, Dallas-Fort Worth, Texas, USA (2003)
4. Puder, A.: Mico for the Palm Pilot. (1999) http://www.mico.org/pilot/.
5. Force, T.D.T.: Telecom wireless corba specification. Final Adopted Specification OMG
Document dtc/2001-06-02, Object Management Group, Framingham, MA, USA (2001)
6. Kangasharju, J.: MIWCO - Wireless CORBA extensions for MICO. University of Helsinki.
(2002)
7. IONA Technologies: Orbix/E for C, C++ and Java. (2002)
8. Puder, A., Römer, K.: Mico: An Open Source CORBA Implementation. Morgan Kaufmann
(2000)
9. Arnesen, L.P.S., Valen, E.: Evaluation of CORBA implementations on handheld devices in
wireless networks. Master thesis, Department of Informatics, University of Oslo, Norway
(2002) In norwegian.
10. Tůma, P., Buble, A.: Open corba benchmarking. In: Proceedings of the International Symposium on Performance Evaluation of Computer and Telecommunication Systems (SPECTS
2001), Orlando, Florida, USA (2001)
11. (ed.), P.K.: White paper on benchmarking version 1.0. White Paper OMG Document
bench/99-12-01, Object Management Group, Benchmark PSIG, Framingham, MA, USA
(1999)