Towards Ethernet-based wireless mesh networks for fast moving users
advertisement

Towards Ethernet-based wireless mesh networks for fast moving users
Filip De Greve, Wim Vandenberghe,
Filip De Turck, Ingrid Moerman and Piet Demeester
Ghent University - IBBT - IMEC - Department of Information Technology
Gaston Crommenlaan 8 - bus 201, 9050 Gent, Belgium.
Email: {Filip.DeGreve,Wim.Vandenberghe}@intec.ugent.be
Abstract
In this paper we examine the capabilities of Switched
Ethernet for building wireless mesh networks (WMNs) and
more specific for the support of fast moving users. We will
motivate that Switched Ethernet with wireless extensions is
a promising auto-configurable WMN technology. An inherent Ethernet feature, topology modification according to the
actual link rates, will be used to avoid poor wireless links
in the active topology. We demonstrate that fast recovery
is feasible in a WMN by extending the standard spanning
tree protocols. Simulations and analytical results will reveal some basic differences if the wired links of Switched
Ethernet are replaced by wireless links and this leads to a
parameter evaluation of the IEEE 802.11e protocol for optimizing the bandwidth usage of the wireless medium.
1
1.1
Introduction
Motivation
Nowadays, a lot of multimedia applications are taken for
granted in fixed networks. These applications require a high
level of Quality of Service (QoS) and are generally characterized by high bandwidth requirements which can currently only be offered by fixed broadband access technologies. In previous work [1] we presented a network architecture which was designed to cope with the specific requirements of delivering broadband traffic to fast moving users.
The aggregation part of this architecture deployed Layer 2
Ethernet techniques and this paper explores the possibilities
of extending Ethernet-based architectures towards wireless
mesh environments. The choice for wireless Ethernet networks will be detailed in the next section. However, in general a lot of challenges have to be tackled before wireless
mesh networks will have a similar throughput or QoS experience as can be expected in a wired environment [2]. Despite the inherent vulnerability of the wireless technology
for all kinds of interference wireless mesh networking will
become important in access and aggregation networks. It is
expected that network installation costs will be lower than
the wired equivalent. WMNs diminish the amount of necessary cables and save on expensive digging costs. In this
paper, we focus on IEEE 802.11 (also known as Wifi) but
promising future technologies such as WiMax which developed a mobile extension of the standard (IEEE 802.16e),
could also be used for mesh networking.
1.2
Related work
Currently, a lot of research defines wireless mesh networks from scratch, proposing their own architecture and
routing protocols. They mostly aim for deployment in
aggregation networks because in this area mesh networks
seem the most promising at this time. While many propose
tree-like architectures [3–5], surprisingly almost no publications seem to be exploring the capabilities of Switched
Ethernet in the wireless mesh. However, why develop a
brand new protocol, if modifications to existing protocols
can behave similarly? Shorter development times and easier acceptance due to the familiarity are straight-forward
additional benefits. In addition, Ethernet is well suited
for the problem statement with fast moving users due to
the fact that Layer 2 forwarding mechanisms can rapidly
adapt to new locations of moving users. Moreover, wireless mesh networks will look like tree-structures where the
root acts as a gateway towards the wired backbone and with
dominant communication between root and leafs. In [3] a
new tree construction algorithm is presented and leaf-leaf
communication is not supported by the architecture. In
Ethernet-based networks leaf-leaf communication will naturally be supported. In [4, 5] good methods for channel assignment and load balancing are presented. [4] presents a
new, yet basic, tree construction technique which is similar
to the IEEE 802.1D spanning tree (ST) protocol. The loadsensitive path weight functions may however cause network
instabilities because they are depending on traffic variations
Proceedings of the 32nd EUROMICRO Conference on Software Engineering and Advanced Applications (EUROMICRO-SEAA'06)
0-7695-2594-6/06 $20.00 © 2006
which may be very large and irregular in WMNs. Therefore,
[5] suggests topology-dependent path weight functions that
base weights on topological properties such as hop count or
link capacity. However, both use load-dependent distributed
algorithms which take time to converge, while fast changing
traffic characteristics are never considered.
1.3
Wired backbone
SGW
Wireless
Mesh
Network
WGW
Contribution
WLAN
WLAN
WLAN
In this paper we examine infrastructure-based mesh networks and we will show that extended Switched Ethernet is
a promising WMN technology. Therefore, we present the
necessary modifications which enable efficient Ethernetbased WMNs. If Switched Ethernet would be deployed
with wireless links, some basic but important performance
differences can be derived. This leads to a parameter optimization of IEEE 802.11e (i.e. the priority handling extension of standard IEEE 802.11) to ensure efficient bandwidth usage. In a test bed environment we illustrate how
Ethernet-based WMNs can automatically adapt their topology in coordination with a link rate adaptation protocol. Because trees are not constructed based on the shortest path to
the root but on the widest path to the root, poor wireless
links are automatically avoided by the active topology. We
also prove that wireless recovery can be as fast as wired recovery without important drawbacks.
system shortly before train traffic will effectively be using
a VLAN tunnel at the next WGW on its track. This paper
won’t detail this reservation mechanism but all the necessary alterations of the distributed Ethernet mechanisms in
order to enable efficient Ethernet-based WMNs. The next
section discusses the performance differences if wired links
are replaced by wireless links and parameter optimizations
of the wireless medium for WMNs.
2
3
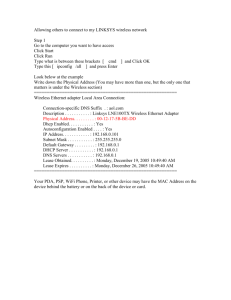
Figure 1. Wireless aggregation networks for
fast moving users
Aggregation network architecture
The architecture (presented in Fig. 1) aims at aggregation networks where typically a lot of leave nodes require
connectivity from and to a limited set of service gateways
(SGWs). The leave nodes are connecting one or more trackside WLANs; these leave nodes are called WLAN gateways (WGWs). Users can connect to the closest WGW.
With the current BW limitations of IEEE 802.11 WMNs
a wired backbone is still indispensable. If multiple gateways towards the backbone are geographically spread, loadbalancing techniques can increase the mesh throughput significantly. Every SGW will be root of a one or more ST
instances and WMN nodes will be member of multiple ST
instances. Our architecture will be optimised for root-leaf
traffic but leaf-leaf communication will still be possible
without necessarily passing the root node. In a wired aggregation network bandwidth guarantees are delivered by
means of VLAN (Virtual LAN) tunnels and an associated
Layer 2 reservation protocol [1]. The Layer 2 reservation
mechanism enables to maintain an up-to-date view of the
resource usage at all times. This view can be used by the
central management that handles the fast moving aspect by
reserving for every moving vehicle the best path towards the
WGW. In order to have continuous bandwidth guarantees
the reservation system has to be activated by the centralized
Wired Ethernet vs. Wireless Ethernet
The range of current WMN systems can be situated
between the following two extremes: single-frequency
WMNs and multi-channel WMNs with directional antennas. For single-frequency systems WMN collisions can
occur with every transmission of nodes within interference range. This deployment has great resemblance with
half-duplex Shared Ethernet with its Ethernet collision domains (CSMA/CD or Carrier Sense Multiple Access with
Collision Detection) and bus systems. Shared Ethernet
(the oldest and original Ethernet standard) was specifically
designed for local area networks (LAN) but the lack of
QoS and throughput limitations due to shared resources
were reasons to deploy full-duplex Switched Ethernet. In
this standard dedicated point-to-point links are introduced
which are able to transport traffic in two directions at the
same time. These same reasons are driving the extension of
WMNs with multiple interfaces and multiple channels. At
the other end of the spectrum multi-channel WMNs with directional antennas are practically able to eliminate all interlink interference. This is an equivalent of wired Switched
Ethernet except for the fact that wireless links remain halfduplex because a single interface cannot send and receive
at the same time. In practice, a WMN will be situated in
between these two extremes: collisions will be reduced but
2
http://folk.uio.no/paalee/
Proceedings of the 32nd EUROMICRO Conference on Software Engineering and Advanced Applications (EUROMICRO-SEAA'06)
0-7695-2594-6/06 $20.00 © 2006
47.4
it remains hard (or expensive) to eliminate all interference.
Undoubtedly, future WMNs will have more and more similarities with Switched Ethernet networks due to the inherent limitations of shared media. Therefore, we focus in this
section on basic but important performance differences if
Switched Ethernet would be deployed with wireless links.
Wired Switched Ethernet has following features: (i) autoconfiguration, (ii) self-recovery, (iii) full duplex links, (iv)
priority queuing, (v) constant bandwidth, (vi) fixed link rate
and (vii) proportional fairness.
The first two features, auto-configuration and selfrecovery, are partly responsible for the popularity of Ethernet and must clearly be maintained in the wireless Ethernet
architecture (see Section 4). The spanning tree protocol is
basically responsible for these two features. The spanning
tree organises the nodes in a forwarding topology which allows nodes to automatically join. The active topology must
be absolutely free of loops which is crucial for correct Ethernet forwarding. In case of failures a new spanning tree
topology is formed. The original standard used the legacy
IEEE 802.1D Spanning Tree Protocol (STP) to maintain a
loop free topology. Enhancement of the recovery times has
been addressed by introduction of the IEEE 802.1W Rapid
Spanning Tree Protocol (RSTP). Finally, IEEE 802.1s Multiple Spanning Tree Protocol (MSTP) was introduced which
maintains multiple trees instead of a single tree. Because all
links can now be used in the network (instead of at most N1 links in an network of N nodes), the bandwidth efficiency
of IEEE 802.1D/W Ethernet networks is improved.
Full duplex links (iii) can only be created if upand downstream traffic are decoupled by using separate
interfaces on different non-interfering channels. However, in practice this option doesn’t seem feasible due
to the limited range of available non-interfering channels. IEEE 802.11b/802.11g standards provide 3 nonoverlapping channels while IEEE 802.11a provides 12 nonoverlapping channels. Priority queueing in wireless networks will be discussed in Section 3.3. The final three features - (v), (vi) and (vii) - are quite straight-forward features for full-duplex links. However, we should be aware
that constant bandwidth or fixed link rate are non-existent
in wireless environment as will be explained in this section.
The proportional fairness problem will be discussed in Section 3.2.
3.1
47.2
Effective BW usage (%)
47
46.8
46.6
46.4
46.2
46
45.8
45.6
0
10
1
10
2
factor α
10
3
10
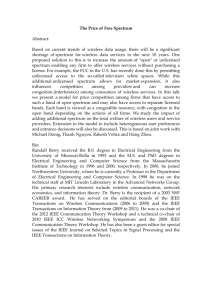
Figure 2. Effective BW usage at the drop off
point (relative to the link rate) as a function of
the factor α of the dominant source.
ance (CSMA/CA). The default transmission scheme requires positive acknowledgement of every successfully received packet by the destination station. Retransmission of
not-acknowledged packets is handled with binary exponential backoff rules. The QoS-extension of DCF, the enhanced
distributed channel access (EDCA) of IEEE 802.11e, permits up to 4 access categories (ACs) at each wireless interface. Each AC i has its own wireless access parameters such as initial backoff window (Wi,init ), retransmission
limit (Ri,max ) and arbitration interframe space (AIF Si ).
Also the factor σi which is used for increasing the window
size after frame collisions is differentiated. Each AC behaves roughly as a single DCF interface but each AC has its
own backoff counter and internal collisions are handled by
a virtual collision handler based on priority: the contending
AC with highest priority gains access to the medium and
other contending ACs go into the backoff phase. If one AC
has a smaller Wi,init , smaller AIF Si or smaller Ri,max ,
the AC has a better chance of accessing the medium earlier.
3.2
Proportional fairness
Proportional fairness is achieved if the available bandwidth in a medium is proportionally distributed according
to the traffic loads of the different flows. In Switched Ethernet temporary packet losses during bursty periods will be
shared proportionally amongst the different flows assuming
equal packet lengths. However, in a wireless medium this
is no longer true. Opnet-simulations can reveal this unfairness. We simulated 4 wireless senders with a single dominant node which sends 3 times more traffic than the other
nodes (with equal packet size). We will note this factor as
α. If traffic load is increased proportionally, the dominant
source will drop off at a certain point while the other nodes
IEEE 802.11 specifics
The 802.11 standard includes two medium access mechanisms: a mandatory contention-based channel access function and an optional centrally controlled access function.
We will only discuss the first one: the distributed coordination function (DCF). DCF is a random access scheme
based on carrier-sense multiple access with collision avoid3
Proceedings of the 32nd EUROMICRO Conference on Software Engineering and Advanced Applications (EUROMICRO-SEAA'06)
0-7695-2594-6/06 $20.00 © 2006
50
will continue increasing their throughput. We call this point
the drop off point. Further traffic load increase leads to complete saturation where all traffic flows end up with an equal
share of the wireless medium. Ideally a mesh reservation
system should try to avoid saturation and maximize the resource usage up to the drop off point. The drop off point as
a function of α is shown in Fig. 2. For increasing α (< 8)
the BW usage will mainly increase while for higher α (≥ 8)
the BW usage will start decreasing again and will saturate
to 46.068% of the link rate. This saturation is noticeable
at α-values higher than 200. The saturation value equals
the effective BW usage of a saturated medium with a single
sender (= 46.073%). This means that for high α values nondominant sources no longer influence the total BW usage.
The absolute α-dependency of the drop off point remains
limited but it accentuates the irregularities in wireless BW
usage that may occur under various conditions.
3.3
Total bandwidth without QoS
Total bandwidth with QoS (Xiao)
Bandwidth QoS class 0 (Xiao)
Bandwidth QoS class 1 (Xiao)
Bandwidth QoS class 2 (Xiao)
Total bandwidth with QoS (Paal)
Bandwidth QoS class 0 (Paal)
Bandwidth QoS class 1 (Paal)
Bandwidth QoS class 2 (Paal)
45
Effective BW usage (%)
40
35
30
25
20
15
10
5
0
1
2
3
4
5
6
7
Initial size of the backoff window
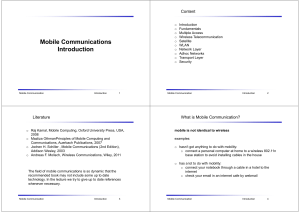
Figure 3. Total effective BW usage and BW
usage per AC as a function of the W0,init .
IEEE 802.11e parameter optimization
systems would just further favor the highest QoS classes
which is not relevant in this study. Keep in mind that this
model is developed for WLANs and that a similar exact
model for mesh networks does not exist. However, under
saturation conditions this model can still be used for optimizing the wireless access parameters. The parameter n
indicating the amount of senders which are interfering, can
simply be derived in a WLAN, namely the amount of stations in range of the access point. In multi-hop networks the
number of interfering stations is different for every node.
The parameter n is chosen by selecting the bottleneck link
in the mesh topology and counting all senders in the same
frequency range which can interfere transmission on this
link. This link can be found easily and is typically located
close to the aggregation gateway where efficient BW usage
is the most critical and saturation is most likely to occur.
In Ethernet the IEEE 802.1p standard introduced
priority-based scheduling. The QoS-extension of IEEE
802.11 is called IEEE 802.11e. However, important differences can be noticed in comparison to its wired equivalent.
Our analytical study of the medium usage is based on models presented in a series of IEEE 802.11 performance studies [6] [7] which are based on Bianchi’s work [8]. Bianchi
introduced the basic model for describing the saturation behaviour of IEEE 802.11 WLANs. Xiao [7] extended this
model for 802.11e and also added delay studies. Paal [6]
further improved the model and achieved the highest accuracy by modelling correctly the virtual collision handler and
added a model for the non-saturated mode which can predict the starvation point of lower ACs. For all these models
a thorough verification is performed with simulation results.
In our simulations, we used Paal’s model (unless mentioned otherwise) because this is the most complete model.
The current value Wij of the backoff window for AC i and
the jth backoff stage is determined as follows with σ ≥ 1.0:
Wij = σ j · Wi,init , for j = 0, 1, ... , Ri,max
Wi,init = σ i · W0,init , for i = 0, 1, ... , N oQ − 1
3.3.1
Influence of the number of output queues per AC
Introduction of multiple output queues per AC surprisingly
affects the maximal bandwidth usage. This is illustrated on
Fig. 3 which represents the effective total BW usage and the
BW usage per AC as a function of the initial window size.
For low initial backoff windows the BW usage decreases if
three ACs are introduced. For higher initial backoff windows the BW usage without QoS will drop earlier. Actually
this effect is similar to the findings in [8] according to the
number of IEEE 802.11 stations n: the maximum BW differs for different values of n. As explained in 3.1 every AC
acts as a single DCF sender; this means that by adding QoS
queues there are no longer n senders but rather n · N oQ
senders. This explains the shift in maximal BW usage. Two
models, Xiao and Paal, are compared: it is clear that due to
the virtual collision handler Paal achieves a higher through-
(1)
(2)
The AC access parameters are bound to the following rule
with AC 0 referred to as the highest AC: for 0 ≤ k <
l < N oQ: Wk,init ≤ Wl,init , Rk,max ≤ Rl,max and
AIF Sk ≤ AIF Sl . N oQ indicates the number of active QoS queues per station. Equation 1 implicates that
all ACs have the same exponential backoff mechanism
and that access control chances don’t depend on the exact
backoff stage. Equation 2 indicates that the initial backoff windows ratios are constant, meaning W0,init /W1,init =
W1,init /W2,init = W2,init /W3,init = 1/σ. More complex
4
Proceedings of the 32nd EUROMICRO Conference on Software Engineering and Advanced Applications (EUROMICRO-SEAA'06)
0-7695-2594-6/06 $20.00 © 2006
2
Total effective BW usage (%)
45
40
35
30
n=3
n=8
n=25
n=50
n=100
25
20
8
16
64
128
256
Ratio: σ=1
Ratio: σ=1.25
Ratio: σ=1.33
Ratio: σ=1.5
Ratio: σ=2
Ratio: σ=3
4.5
4
1.6
3.5
1.4
3
2.5
1.2
2
1
1.5
8
16
32
64
128
256
1
Initial size of the backoff window
512
Initial size of the backoff window
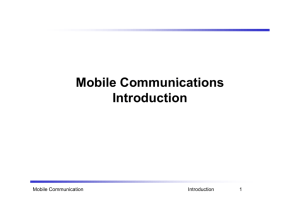
Figure 5. Total effective BW usage as a function of the initial backoff window.
Figure 4. Total effective BW usage for N oQ=3
for different numbers of interfering nodes n.
3.3.3
put for the highest AC and that other ACs get less access
to the medium in comparison with Xiao. The influence is
the highest for low initial backoff windows and decreases
for increasing Wi,init which is logical because the amount
of internal collisions is strongly reduced for higher backoff windows. It is clearly shown that the lowest AC’s BW
usage doesn’t drop to zero in saturation. In Switched Ethernet the highest QoS class would starve all other classes.
From our point of view this seems the appropriate behavior
while many authors find this starvation effect a disadvantage. IEEE 802.11e lacks this feature due to the fact that
AC queues have an independent backoff timer as explained
previously. Implementations which freeze the backoff timer
of lower classes if the highest AC queue is non-empty, could
achieve a pure priority-based access control where all lower
ACs would be starved by the highest AC.
3.3.2
1.8
0.8
32
5
BW: σ=1
BW: σ=1.25
BW: σ=1.33
BW: σ=1.5
BW: σ=2
BW: σ=3
Ratio of BW usages class 0 and class 1
Total BW usage (%), relative to without QoS
50
Influence of the parameter σ
In Fig. 5 we examine the influence of varying the parameter
σ. Focussing on maximizing the BW usage two operating
modes are clear: for high Winit it is better to choose a low σ
while for low Winit higher σ values improve the BW usage.
However, low σ values imply that BW usage of high priority ACs are influenced by the BW usage of the lower ACs.
This is visualized on the second axis: a high BW usage ratio of class 0 and class 1 is desired. For mesh networks
which have to be deployed with low Winit according to the
previous study, this means that high σ values are preferred.
At this point there seems no upper limit for the σ value
but this changes if the influence of σ on the different average delays per AC is taken into account. This is depicted
in Fig. 6. In the IEEE standards default values are recommended for the initial backoff window size: 32 time slots
for IEEE 802.11b and 16 time slots for IEEE 802.11a but
we will proof that this is not always the best value for mesh
networks. To illustrate this we will optimise the BW usage for n=5 and N oQ = 3 and with the following perhop averaged delay constraints: delayAC0 < 500μsec,
delayAC1 < 1000μsec and delayAC2 < 2000μsec. For
high σ it seems hard to fulfill the delay constraints of
the lower classes. If we operate close to saturation, a
high σ will restrict the medium access of the lower values too much leading to high average delays. If we start
max
=32 not a single delay
with σ=3 and Winit,0 = Winit,0
constraint is met: delayAC0 = 656μsec, delayAC1 =
1515μsec and delayAC2 = 4004μsec. It is not until
Winit,0 is increased to 512, that all delay conditions are
met: delayAC0 = 349μsec, delayAC1 = 570μsec and
delayAC2 = 1231μsec. At this point the BW usage has
dropped to approximately 53% of the maximum BW usmax
. In this evaluation the lowest QoS class
age with Winit,0
Influence of the parameter n
In Fig. 4 the influence of the number of senders is depicted. For high n the BW usage drops severely for low
Winit and it is better to choose high Winit . However,
infrastructure-based mesh networks will probably operate
with much lower n ranges: between 2 and 10. In this area
low Winit are preferred: for n=3 the maximum BW usage is
achieved for W0,init =16 but there is no BW gain by adding
three QoS queues as can be seen in the previous Fig. 3:
BW usage drops with 3% compared to DCF. For higher
Winit gains will increase compared to DCF: up to 50% for
W0,init =512. High Winit are of course less interesting for
mesh networks due to the decreased AC differentiation.
5
Proceedings of the 32nd EUROMICRO Conference on Software Engineering and Advanced Applications (EUROMICRO-SEAA'06)
0-7695-2594-6/06 $20.00 © 2006
6000
5000
4000
Delay (μsec)
limited to the link initiation phase. It is still dependent
on the NIC capabilities (such as IEEE 802.11 version or
supported rates) but the highest-level operational mode will
also depend on the wireless link conditions. We will not further describe such LRA algorithms [9] but our architecture
is able to use LRA feedback to adapt the active topology.
σ=2 class=0
σ=2 class=1
σ=2 class=2
σ=2.5 class=0
σ=2.5 class=1
σ=2.5 class=2
σ=3 class=0
σ=3 class=1
σ=3 class=2
3000
4
2000
4.1
1000
0
8
16
32
64
128
256
Prototype node architecture
The node architecture of a wireless Ethernet node is depicted in Fig. 7. The representation is concordant with Click
Modular Router [10] configurations. The Click Modular
Router is a modular software architecture for building flexible and configurable network devices. The Click configuration consists of packet processing modules which are interconnected in a directed graph. Packets are flowing along
the edges of the graph and enter/exit via decoupled network interface modules: incoming interfaces on the left and
outgoing interfaces on the right. The dark grey zone contains the representation of a standard VLAN-aware multispanning tree Ethernet switch. At the network edges traffic
will be VLAN-tagged: a VLAN tag can uniquely be associated with a single spanning tree instance and will define
the end-to-end path because every tree contains a single
path between every two nodes. As presented in previous
work [1] we extended the switch with a fast and efficient
failure detection mechanism, called Link Probe. We proved
that very fast recovery in Ethernet networks of realistic size
is still possible even though recovery times of a distributed
recovery system are dependent on the network size. We use
a Link Probe send module per link port and a single Link
Probe analyser module. In the section about fast recovery
we will further detail both these modules.
The key blocks for extending the Ethernet switch are the
linkbinder (wireless-interface-to-link conversion) and the
linkunbinder (link-to-wireless-interface conversion). The
linkbinder is controlled by the neighbor-interface binding
(NIB) module which gets its information from the neighborhood table. The NIB module will decide which neighbours will be connected over a direct link. The linkbinder
module is responsible for the forwarding to the correct link
port (e.g. link port 1-4 on Fig. 7). The linkunbinder will
do the exact reverse operation of the linkbinder module and
map the link port on the correct wireless output NIC.
The wifi-dependent control traffic are probes, beacons
or control messages for distributing wireless information in
the WMN. This information is used for creating the singlehop neighbourhood table. The link-dependent control traffic include spanning tree messages but also messages for future building blocks like distributed channel assignment and
power control modules. Additionally the link rate adapta-
512
Initial backoff window size
Figure 6. Average saturation delay per AC as
a function of the initial backoff window.
condition seemed the biggest driver for increasing Winit,0 .
Taking a look at the delay curves in Fig. 6 shows that decreasing σ will positively affect the delays of the lowest
classes while the delay of the highest class is increased.
Important to notice is that the impact gradually increases
for lower ACs and (less important) for lower Winit,0 . This
means that delays for the highest AC will relatively change
less. If we increase σ to 2.5 all constraints are met for
Winit,0 =128: delayAC0 = 481μsec, delayAC1 = 848μsec
and delayAC2 = 1757μsec. At this point the BW usage reaches 89% of the maximum possible BW usage. In
this evaluation all 3 constraints are decisive and the highest AC constraint is just met. These findings suggest that
σ cannot be much further decreased in order to reach lower
Winit,0 and increase the BW usage. Indeed, for σ=2 the
conditions are met for Winit,0 =256: delayAC0 = 438μsec,
delayAC1 = 639μsec and delayAC2 = 1038μsec with AC
0 as the biggest driver. The BW usage only reached 77%
for σ=2. In this way an ideal σ-value can be derived.
3.4
Wireless MST Ethernet Mesh Network
Link rate adaptation (LRA)
The rate of a wired link between two nodes is determined by an auto-negotiation protocol which outcome is
dependent on the capabilities of the two network interface
cards (NICs). The purpose of auto-negotiation is to find a
way for two NICs that share a link, to communicate with
each other, regardless of whether they both implement the
same Ethernet version or option set. Auto-negotiation is
performed during link initiation and configures each NIC
for the highest-level operational mode that both NICs support. In a wireless environment similar techniques exist to
determine the optimal rate for two wireless NICs to communicate. However, this process is continuous and no longer
6
Proceedings of the 32nd EUROMICRO Conference on Software Engineering and Advanced Applications (EUROMICRO-SEAA'06)
0-7695-2594-6/06 $20.00 © 2006
Single-hop
Neighborhood Info
Table
PDU or data packets
configuration messages
Interface –
Power frequency
Table
Label over different trees
(requires configuration)
Constructing Trees
Link-dependent
control traffic
uses
Neighbor Interface binding
Label -Tree
Table
Block/
unblock
Block/
unblock
alters
OUT
LinkProbe Send
Module
1
Interface 1
Data packets
other
2
3
Interface 1
LinkProbe Send
Module
Link
Probe
Analyser
Data packets
LinkProbe Send
Module
Data packets
LinkProbe Send
Module
4
Interface 2
wifi-dependent
control traffic
Link-dependent
control traffic
MSTP
wifi-dependent
control traffic
IN
Labels identifying trees
(autoconfiguration)
Interface 2
Data packets
other
link ports
feedback
Set rate outgoing packets
Link Rate Adaptation
Figure 7. Node architecture for 2 wireless NICs, max. 4 connected neighbors and 2 tree instances
4.2.1
Max
Neighbours=1
WMN A
0
36 Mb/s
Max
Neighbours=2
12 Mb/s
WMN A
WMN B 555555
0
12 Mb/s
In order to adapt the active topology to the effective link
rates we used the stripped MADWIFI driver and combined it with the standard Click element MadwifiRate. The
specifics of the LRA protocol implemented in MadwifiRate
are not presented (but can be found in [9]); however, any
LRA protocol could be used to adapt the ST parameters.
The Ethernet standard suggests how the ST parameters can
be adjusted to the current link rates: port path cost parameters can be modified according to the conversion table (pp.
154 - IEEE 802.1D-2004) as presented in Table 1. In order
to avoid instable topologies multiple successful transmissions are required after link rate increase before port path
cost parameters are effectively adjusted.
WMN B
36 Mb/s
WMN C 1111110
WMN C
1666667
Max
Neighbours=1
Figure 8. Test bed with three WMN nodes.
tion module will monitor the incoming traffic on all wireless
NICs and will determine appropriate output rates per destination address. This is demonstrated in Section 4.2.1.
4.2
Tree modification due to LRA
Root
Root
As test a stream is sent from node A to node C, consisting of short 14 Mbps bursts with packet size 1404 bytes.
Between node A and node C (see Fig. 8), a wall reduces
the maximum attainable link rate. Assume the LRA protocol starts at the lowest 802.11a rate, 6 MBps and while the
LRA protocol will increase sequentially the rate according
to current medium conditions. Figure 9 shows how the link
rate is sequentially increased to 9, 12 and 18 Mbps. At a
link rate of 18 Mbps the bursts successfully pass with full
peak rate. During the process no Spanning Tree instabilities are detected and a single topology change (with obligatory MAC address flushing) occurs in the network when the
port path cost parameters associated with the link between
A and C are not further decreased. The ST protocol converges with root path costs 0 for node A, 555555 for node
B and 1111110 for node C.
Test bed implementation
We implemented this data plane on a Click Modular
Router test bed with three Linux PCs (see Fig. 8). We used
two D-Link wireless NICs with Atheros AR5212 chipset
(802.11a/b/g compliant) per station (at the time of writing
802.11e compliant NICs are still rare) and the complete
Linux driver is available from the Multiband Atheros Driver
for Wifi (MADWIFI) project [11]. We also used a stripped
MADWIFI driver [12] which allows us to send and receive
802.11-frames in Click; other device drivers would only allow you to exchange 802.3-frames.
7
Proceedings of the 32nd EUROMICRO Conference on Software Engineering and Advanced Applications (EUROMICRO-SEAA'06)
0-7695-2594-6/06 $20.00 © 2006
16
250
Minimized detection time (wired)
Offset value (wired)
Minimized detection time (wireless−ng)
Offset value (wireless−ng)
Minimized detection time (wireless−stripped)
Offset value (wireless−stripped)
200
12
10
Time (ms)
Effective throughput (Mbps)
14
8
6
150
100
4
50
2
0
0
0.5
1
1.5
2
Time (s)
2.5
3
3.5
4
7
0
x 10
0
10
20
30
40
50
60
70
80
90
100
Send Interval (ms)
Figure 9. Illustration of LRA algorithm.
Figure 10. Minimized detection times.
Table 1. IEEE 802.1D path cost parameters.
Link speed Recommended value
≤ 100 Kb/s
200 000 000
1 Mb/s
20 000 000
10 Mb/s
2 000 000
100 Mb/s
200 000
4.2.2
the Link Probe modules are bound by the following equation: Receive Interval > Send Interval · 2 + offset value.
The stripped driver which was based on an old driver implementation, is less efficient for small send intervals. The new
driver Madwifi-ng (2006-02-22) performed better and had
only slightly higher offsets than wired Ethernet (in the 5msrange). Detection times near 25 ms can be achieved on standard Linux PCs with 3GHz CPU clock speed. We stresstested the performance by saturating the medium with two
other nearby nodes. The additional offset was in the msrange concordant with the saturation delay calculations of
Section 3.3. If the Link Probe packets could be given priority with 802.11e NICs, detection times could be made less
load-dependent. After detection recovery of connectivity is
performed quickly but this is not sufficient to recover the
data operation: out-dated MAC addresses still need to be
deleted as fast as possible. Because the faster Link Probe
mechanism takes over from the slow standard detection
mechanism, we payed extra attention to MSTP’s implementation of the flushing mechanism. Otherwise, flushing risks
to be postponed for a single period of the Hello time.
Fast recovery in wireless mesh networks
Instead of adding a novel management component the distributed Link Probe mechanism is used in cooperation with
the MSTP protocol in order to maintain the plug-and-play
feature of Ethernet. Link Probe was developed to bypass
the MSTP failure detection by deploying a more bandwidth
efficient heart beat mechanism that monitors the link status
in wired environment. In wireless environment Link Probe
is even more suited due to the fact that hardware detection
techniques (e.g. for UTP or coax failures) are useless and
that even link quality degradations can now easily be detected. When monitoring the link status there is no need to
look for specific packets since any packet is fine to assert
that the link is operational. The receiver module of Link
Probe will reset the receive interval at the receiving side every time a packet arrives. The send module of Link Probe
will assure that every send interval at least one packet is
transmitted on the link. The send module will monitor outgoing packets: if a packet passes during the send interval,
the sender does not need to send a packet. This means that
send and receive interval can be reduced without sacrificing
usable bandwidth. As shown in Section 3.2 on proportional
fairness the Link Probe streams will have no impact on the
BW usage. With a send interval of 10ms Link Probe rates
are approximately 50kbps, which means α is easily larger
than 100 in an IEEE 802.11a medium.
The detection times of our implementation in the Click
Modular Router are presented in Fig. 10 and compared with
the results in wired Ethernet. Send and receive interval of
However, the coordination of Link Probe with MSTP is
not sufficient in a wireless medium because as stated previously mesh network throughput can only be increased significantly if frequency usages are dispersed across the entire WMN. If a node gets disconnected after a node failure,
neighbour nodes may be communicating on other frequencies. This is the case in the network example of Fig. 8. We
configured arbitrarily-chosen frequencies: WMN node A
and WMN node B communicate on channel 36 and WMN
node B and WMN node C communicate on channel 132.
If node B fails, node C gets disconnected but has no active
interface that can communicate with node A. The disconnected node would want to connect to a neighbour node
which has the best connectivity with the root or in other
words, to the neighbour node with lowest ST root distance.
8
Proceedings of the 32nd EUROMICRO Conference on Software Engineering and Advanced Applications (EUROMICRO-SEAA'06)
0-7695-2594-6/06 $20.00 © 2006
6
the wireless access parameters do not automatically guarantee optimal bandwidth usage of the medium.
Effective throughput (Mbps)
5
References
4
[1] De Greve F., Van Quickenborne F., et al., A new
carrier-grade aggregation network model for delivering broadband service to fast moving users, To appear
in International Journal of Communication Systems,
Wiley, 2006.
3
2
1
0
0.94
0.96
0.98
1
1.02
Time (s)
1.04
1.06
[2] Bruno R., Conti M. and Gregori E., Mesh networks:
commodity multihop ad hoc networks, IEEE Communications Magazine, Mar 2005.
1.08
7
x 10
Figure 11. Recovery in the WMN of Fig. 8
[3] Shenoy N., Pan Y. , et. al., Route robustness of multimeshed tree routing scheme for internet MANETs,
IEEE Globecom conference, Nov 2005, St. Louis,
USA.
This problem is resolved by the use of beacons which contain the most recent root distance in every ST instance.
In addition, nodes will distribute notifications to all their
neighbours if frequency changes occurred. In this way,
nodes can store all this backup path information. Due to
the fixed infrastructure-based environment this information
is not likely to change rapidly. After failure node C will
detect that its NIC has lost all connectivity and will start
searching for the best neighbour amongst its non-connected
neighbours: node A. Lookup in the neighbourhood table
will reveal the currently used channels of node A and node
C will perform a frequency change in order to restore connectivity as illustrated in Fig. 11. We send 4 Mbps constant
bit rate data stream from node A to node C and simulate a
failure of node B. The Link Probe receive window was set
to 300ms. The time after failure detection to swap channels
is of the order of ms, as is the time to reconfigure the spanning tree. No packets were received during 311ms which
indicates that total recovery time is dominated by the detection time (as in wired Ethernet environment).
5
[4] Raniwala A. and Chiueh T, Architecture and algorithms for an IEEE 802.11-based multi-channel wireless mesh networks, IEEE Infocom 2005, Mar 2005,
Miami, USA.
[5] Yang Y., Wang J. and Kravets R., Load-balanced
Routing For Mesh Networks, 11th International Conference on Mobile Computing and Networking, Aug
2005.
[6] Engelstad P.E. and Osterbo O.N., Delay and throughput analysis of IEEE 802.11e EDCA with starvation
prediction, 5th International IEEE Workshop on Wireless Local Networks, Nov 2005, Sydney, Australia.
[7] Xiao Y., Performance analysis of priority schemes
for IEEE 802.11 and 802.11e Wireless LANs, IEEE
Transactions on Wireless Communications, 4(4), July
2005.
[8] Bianchi G., Performance analysis of the IEEE 802.11
Distributed Coordination Function, IEEE J-SAC,
18(3), Mar 2000, pp. 535-547.
Conclusions
[9] Lacage M., Masnshaei M.H. and Turletti T, IEEE
802.11 rate adaptation: a practical approach, The 7th
ACM/IEEE MSWiM, 2004, Venice, Italy, pp. 126-134.
In this paper we examined infrastructure-based mesh
networks and showed that wireless Switched Ethernet is a
promising technology for aggregation networks. We presented the necessary extensions to standard Ethernet and
evaluated them in a test bed implementation. This allowed
us to prove that fast distributed recovery based on the spanning tree recovery mechanism can be realised in practice.
We also introduced modifications of the active spanning tree
topology in coordination with a link rate adaptation algorithm. This enables wireless mesh networks to avoid poor
wireless links that could form a bottleneck for the multi-hop
throughput. Analytically, we studied IEEE 802.11e parameter variations and illustrated that the standards settings of
[10] Kohler E. , Morris R., Chen B., Jannotti J. and
Kaashoek M. F., The Click modular router, ACM
Transactions on computer systems, 18(3), pp. 236 297, 2000.
[11] Multiband Atheros Driver for WiFi (MADWIFI),
[http://sourceforge.net/projects/madwifi/], Mar 2006.
[12] Bicket J., Madwifi Stripped, [http://pdos.csail.mit
.edu/jbicket/madwifi.stripped/], Feb. 2006.
9
Proceedings of the 32nd EUROMICRO Conference on Software Engineering and Advanced Applications (EUROMICRO-SEAA'06)
0-7695-2594-6/06 $20.00 © 2006